JP2005201767A - ナビゲーション装置 - Google Patents
ナビゲーション装置 Download PDFInfo
- Publication number
- JP2005201767A JP2005201767A JP2004008210A JP2004008210A JP2005201767A JP 2005201767 A JP2005201767 A JP 2005201767A JP 2004008210 A JP2004008210 A JP 2004008210A JP 2004008210 A JP2004008210 A JP 2004008210A JP 2005201767 A JP2005201767 A JP 2005201767A
- Authority
- JP
- Japan
- Prior art keywords
- exit
- road
- path
- link
- intersection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
Abstract
【解決手段】 交差点のノード付近に設けられ、進入リンク(進入路)の走行レーンに対応づけられた路上ペイント情報の記憶媒体を有するカーナビゲーション装置が、そのノードの進入リンクに対して退出リンク(退出路)が成す方向が、概略方向を構成するために設けられた方向領域の1つの周縁部に属する場合、その進入リンクの進入レーンに対する退出リンクの路上ペイント情報に基づいて、ノードにおける進入リンクに対する退出リンク(退出路)の概略方向を特定し、その特定した退出リンクの概略方向を音声および/または画像で表示する。
【選択図】 図6
Description
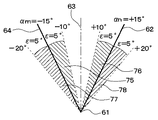
次にステップ220では、ステップ210で特定した角度θが、ステップ215で選択した判定候補の方向領域に属するか否かを判定する。具体的には、αm<θ≦αnであるか否かを判定する。角度θが当該方向領域に属している場合、処理はステップ225に進み、属していない場合、処理はステップ250に進む。
Claims (6)
- 交差点付近に設けられた視覚的交差点退出方向表示に基づく退出方向情報を記憶する記憶媒体と、
前記記憶媒体に記憶された前記退出方向情報に基づいて、前記交差点における進入路に対する退出路の概略方向を特定する特定手段と、
前記特定手段の特定に基づいて、前記退出路の表示を行う表示手段とを備えたナビゲーション装置。 - 前記表示手段は、前記特定手段の特定した前記退出路の概略方向を表示することを特徴とする請求項1に記載のナビゲーション装置。
- 前記特定手段は、前記進入路に対して前記退出路が成す方向が、前記概略方向を構成するために設けられた方向領域の周縁部に属する場合、前記記憶媒体に記憶された前記退出方向情報に基づいて、前記交差点における進入路に対する退出路の概略方向を特定することを特徴とする請求項1ないし2に記載のナビゲーション装置。
- 前記記憶媒体が記憶する退出方向情報は、前記進入路の走行レーンに対応づけられており、
前記特定手段は、前記記憶媒体に記憶された前記退出方向情報に基づいて、前記交差点における進入路の走行レーンに対する退出路の概略方向を特定することを特徴とする請求項1ないし3のいずれか1つに記載のナビゲーション装置。 - 前記進入路および前記退出路は、目的地までの誘導経路の一部であることを特徴とする請求項1ないし4のいずれか1つに記載のナビゲーション装置。
- 前記特定手段は、前記概略方向を構成するために設けられた方向領域の1つに、前記進入路に対して前記退出路が成す方向が含まれているか否かを判定する手段と、
前記判定が肯定であることに基づき、前記進入路に対して前記退出路が成す方向が当該1つの方向領域の周縁部に属する場合に、前記記憶媒体に記憶された前記退出方向情報に基づいて、前記交差点における進入路に対する退出路の概略方向を特定する手段と、
この判定が否定であることに基づき、前記進入路に対して前記退出路が成す方向が当該1つの方向領域に外接する部分に属する場合に、前記記憶媒体に記憶された前記退出方向情報に基づいて、前記交差点における進入路に対する退出路の概略方向を特定する手段と、を備えたことを特徴とする請求項1ないし5のいずれか1つに記載のナビゲーション装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004008210A JP4281559B2 (ja) | 2004-01-15 | 2004-01-15 | ナビゲーション装置 |
| US11/004,938 US7483785B2 (en) | 2004-01-15 | 2004-12-07 | Navigation apparatus |
| DE102004063034A DE102004063034A1 (de) | 2004-01-15 | 2004-12-28 | Navigationsvorrichtung |
| CNB2005100057034A CN1331102C (zh) | 2004-01-15 | 2005-01-13 | 导航装置及其方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004008210A JP4281559B2 (ja) | 2004-01-15 | 2004-01-15 | ナビゲーション装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005201767A true JP2005201767A (ja) | 2005-07-28 |
| JP4281559B2 JP4281559B2 (ja) | 2009-06-17 |
Family
ID=34737317
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004008210A Expired - Fee Related JP4281559B2 (ja) | 2004-01-15 | 2004-01-15 | ナビゲーション装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7483785B2 (ja) |
| JP (1) | JP4281559B2 (ja) |
| CN (1) | CN1331102C (ja) |
| DE (1) | DE102004063034A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010164343A (ja) * | 2009-01-13 | 2010-07-29 | Denso Corp | ヘッドアップディスプレイの表示方法 |
| CN102654943A (zh) * | 2011-03-02 | 2012-09-05 | 奥迪股份公司 | 机动车 |
| JP2013113677A (ja) * | 2011-11-28 | 2013-06-10 | Denso Corp | ナビゲーション装置 |
| CN106228829A (zh) * | 2016-09-14 | 2016-12-14 | 百度在线网络技术(北京)有限公司 | 一种道路信息的确定方法及装置 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4466277B2 (ja) * | 2004-08-18 | 2010-05-26 | 株式会社デンソー | ナビゲーション装置およびプログラム |
| JP4556925B2 (ja) * | 2006-07-31 | 2010-10-06 | 株式会社デンソー | 分岐案内装置及び案内図生成装置 |
| JP4869106B2 (ja) * | 2007-02-28 | 2012-02-08 | アルパイン株式会社 | ナビゲーション装置およびその交差点拡大図表示方法並びに地図情報作成方法 |
| CN103791914B (zh) * | 2007-03-23 | 2015-09-02 | 三菱电机株式会社 | 导航系统及车道信息显示方法 |
| KR100913672B1 (ko) * | 2007-05-16 | 2009-08-26 | 팅크웨어(주) | 가상 맵매칭 방법 및 그 시스템 |
| US20110225103A1 (en) * | 2010-03-09 | 2011-09-15 | International Business Machines Corporation | Efficiency of computer modeling and analysis of complex processes |
| US9194711B2 (en) * | 2011-12-29 | 2015-11-24 | Wei Lu | Navigation system with grade-separation detection mechanism and method of operation thereof |
| CN105277203B (zh) * | 2014-06-30 | 2017-06-23 | 高德信息技术有限公司 | 一种导航动作的生成方法、导航方法和设备 |
| US9945689B2 (en) * | 2015-08-25 | 2018-04-17 | Here Global B.V. | Location referencing for roadway feature data |
| US10234294B2 (en) * | 2016-04-01 | 2019-03-19 | Here Global B.V. | Road geometry matching with componentized junction models |
| JP7119653B2 (ja) * | 2018-07-02 | 2022-08-17 | 株式会社デンソー | 車両制御装置 |
| CN110940348A (zh) * | 2018-09-25 | 2020-03-31 | 北京四维图新科技股份有限公司 | 分岔路口方向计算及导航方法、车载导航仪及移动终端 |
| CN113720343A (zh) * | 2021-08-16 | 2021-11-30 | 中国科学院上海微系统与信息技术研究所 | 基于动态数据实时适应的航向预测方法 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07272197A (ja) | 1994-04-01 | 1995-10-20 | Sumitomo Electric Ind Ltd | 交差点案内装置 |
| JPH08254436A (ja) * | 1995-01-20 | 1996-10-01 | Mitsubishi Electric Corp | ナビゲーション装置 |
| US5729109A (en) * | 1995-07-19 | 1998-03-17 | Matsushita Electric Industrial Co., Ltd. | Navigation system and intersection guidance method |
| US5874905A (en) * | 1995-08-25 | 1999-02-23 | Aisin Aw Co., Ltd. | Navigation system for vehicles |
| JP3448134B2 (ja) * | 1995-08-25 | 2003-09-16 | アイシン・エィ・ダブリュ株式会社 | 車両用ナビゲーション装置 |
| JP3233017B2 (ja) * | 1996-05-14 | 2001-11-26 | トヨタ自動車株式会社 | 車両用経路案内装置 |
| JP3322137B2 (ja) * | 1996-08-29 | 2002-09-09 | 株式会社デンソー | 車両用ナビゲーション装置 |
| KR100269070B1 (ko) * | 1996-08-30 | 2000-10-16 | 모리 하루오 | 차량용네비게이션장치 |
| JPH1183518A (ja) | 1997-09-02 | 1999-03-26 | Denso Corp | 車両用走行経路案内装置 |
| FR2784776B1 (fr) * | 1998-10-19 | 2000-12-01 | Renault | Procede de guidage d'un vehicule routier |
| JP3908437B2 (ja) | 2000-04-14 | 2007-04-25 | アルパイン株式会社 | ナビゲーションシステム |
| DE60043395D1 (de) * | 2000-07-04 | 2010-01-07 | Mitsubishi Electric Corp | Führungsanzeigenverfahren in einem fahrzeugbordnavigator |
| JP2002245593A (ja) | 2001-02-15 | 2002-08-30 | Hitachi Ltd | 道路標識情報提供システム、道路標識情報提供装置 |
| DE10146744A1 (de) * | 2001-09-22 | 2003-04-17 | Bosch Gmbh Robert | Verfahren und System zum Bereitstellen von Fahrspurempfehlungen |
| JP3928700B2 (ja) | 2001-10-26 | 2007-06-13 | アイシン・エィ・ダブリュ株式会社 | 車両用ナビゲーション装置 |
| JP2003240587A (ja) | 2003-01-14 | 2003-08-27 | Aisin Aw Co Ltd | ナビゲーション装置及び該装置の記録媒体 |
| US9341485B1 (en) * | 2003-06-19 | 2016-05-17 | Here Global B.V. | Method and apparatus for representing road intersections |
-
2004
- 2004-01-15 JP JP2004008210A patent/JP4281559B2/ja not_active Expired - Fee Related
- 2004-12-07 US US11/004,938 patent/US7483785B2/en not_active Expired - Fee Related
- 2004-12-28 DE DE102004063034A patent/DE102004063034A1/de not_active Ceased
-
2005
- 2005-01-13 CN CNB2005100057034A patent/CN1331102C/zh not_active Expired - Fee Related
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010164343A (ja) * | 2009-01-13 | 2010-07-29 | Denso Corp | ヘッドアップディスプレイの表示方法 |
| CN102654943A (zh) * | 2011-03-02 | 2012-09-05 | 奥迪股份公司 | 机动车 |
| JP2013113677A (ja) * | 2011-11-28 | 2013-06-10 | Denso Corp | ナビゲーション装置 |
| CN106228829A (zh) * | 2016-09-14 | 2016-12-14 | 百度在线网络技术(北京)有限公司 | 一种道路信息的确定方法及装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN1641710A (zh) | 2005-07-20 |
| JP4281559B2 (ja) | 2009-06-17 |
| US7483785B2 (en) | 2009-01-27 |
| CN1331102C (zh) | 2007-08-08 |
| US20050159884A1 (en) | 2005-07-21 |
| DE102004063034A1 (de) | 2005-08-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4281559B2 (ja) | ナビゲーション装置 | |
| JP3801433B2 (ja) | ナビゲーション装置およびその記憶媒体 | |
| US8232900B2 (en) | Navigation system and route guidance method | |
| JP2010271155A (ja) | 現在位置特定装置とその現在位置特定方法 | |
| JP2007240400A (ja) | ナビゲーション装置および複数経路融合方法 | |
| JP2009204514A (ja) | ナビゲーション装置及びナビゲーションプログラム | |
| US7124025B2 (en) | Vehicular navigation device | |
| US7970536B2 (en) | Navigation system | |
| JP2004317410A (ja) | 装置 | |
| JP2004245648A (ja) | 地図表示装置 | |
| JP2006317286A (ja) | 車載ナビゲーション装置 | |
| JP2002202147A (ja) | ナビゲーション装置 | |
| JP2010066248A (ja) | 歩行用案内装置 | |
| JP4513814B2 (ja) | 車両用ナビゲーション装置 | |
| JPH11311535A (ja) | 車両用ナビゲーション装置及び記憶媒体 | |
| JP2001059731A (ja) | ナビゲーション装置およびそのプログラムを記録した記憶媒体 | |
| JP2007113940A (ja) | 車両用経路探索装置 | |
| JP2009128316A (ja) | 経路案内システム及びプログラム | |
| JP2011220746A (ja) | ナビゲーション装置 | |
| JP2005321360A (ja) | 車載ナビゲーション装置 | |
| JP4313600B2 (ja) | 経路案内装置 | |
| JP4985297B2 (ja) | ナビゲーション装置およびナビゲーション装置用のプログラム | |
| JP2007003365A (ja) | 車載用ナビゲーション装置及び車載用ナビゲーション装置の経路探索方法。 | |
| JP4062180B2 (ja) | 仮想移動案内装置 | |
| JP2009014506A (ja) | 現在位置検出システム、現在位置検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060926 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080909 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081107 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081202 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090129 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090224 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090309 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120327 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120327 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130327 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140327 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |