JP2005016995A - 赤外線構造物診断方法 - Google Patents
赤外線構造物診断方法 Download PDFInfo
- Publication number
- JP2005016995A JP2005016995A JP2003178893A JP2003178893A JP2005016995A JP 2005016995 A JP2005016995 A JP 2005016995A JP 2003178893 A JP2003178893 A JP 2003178893A JP 2003178893 A JP2003178893 A JP 2003178893A JP 2005016995 A JP2005016995 A JP 2005016995A
- Authority
- JP
- Japan
- Prior art keywords
- image
- screen
- display
- infrared
- displaying
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


















Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Investigating Or Analyzing Materials Using Thermal Means (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
- Radiation Pyrometers (AREA)
- Image Processing (AREA)
Abstract
【解決手段】ディジタルカメラと赤外線カメラと距離計とよりなる撮像部と、両カメラの視野を水平、垂直方向に振るパンチルト装置と、演算手段と表示手段よりなる処理装置で構成される診断装置を用いて構造物の欠陥を診断する方法であって、可視画像及び熱画像を処理装置に取り込むステップと、取り込んだ可視画像及び熱画像を測定値により補正した画像を形成し表示手段に表示するステップと、診断者が画面を見て欠陥部を指定するための欠陥部指定画面を表示するステップと、欠陥部をポインティングデバイスでトレースし、欠陥部の大きさ及び面積を上記表示手段に表示するステップ、により構造物のひび割れや空洞部の有無、位置等を検出する。
【選択図】図1
Description
【発明の属する技術分野】
本発明は、ビルや橋梁などの建造物の欠陥の診断方法に係り、特に赤外線を用いてコンクリートやモルタルの浮き上りやひび割れ等の欠陥を診断する赤外線構造物診断方法に関するものである。
【0002】
【従来の技術】
【特許文献1】特開2001−50921
近年、トンネル、高架橋等のコンクリート構造物のコンクリートが劣化し、一部が剥落する事故が発生し、問題となっている。このため、コンクリートの健全度を的確に検査し得る非破壊検査方法の確立が求められている。コンクリートの非破壊検査方法としては、赤外線カメラを用いる赤外線写真法(サーモグラフィー)と、ディジタルスチルカメラを用いるディジタル写真法が知られている。これらの方法は、安全性、簡便性、高速性の点で優れており、最近、急速に普及している。
【0003】
赤外線写真法(サーモグラフィー)は、赤外領域の光によるコンクリート表面の画像から欠陥の有無や程度を把握する方法である。この赤外線写真法(サーモグラフィー)によれば、コンクリート、モルタル、タイル等の浮き、表面付近の内部欠陥(例えば、空洞、ジャンカ)を発見することが可能である。
【0004】
タイル・モルタルの浮き部、コンクリート中のジャンカ、空洞、漏水部等、建造物中に欠陥が存在する部分は、熱伝導率、比熱等、熱的性質が健全部と異なる。健全部と欠陥部の熱的性質の違いは、気温や日射、あるいは人工的な過熱・冷却に起因して生じる構造物の温度変動の中で、表面温度の差となって現れる。土木・建築分野における赤外線写真法とは、赤外線映像装置を用いて物体の表面温度分布(熱画像)を測定し、熱画像上に現れる表面温度異常部から、内部欠陥の存在を推定する方法である。
【0005】
赤外線写真法による欠陥検出の原理図を図2に示す。即ちこの方法は、建造物6の内部に生じた欠陥部61が空隙断熱層となり、日射や気温変化に起因して生じる表面温度の日変動の中で、図2に示すように欠陥部と健全部との間に表面温度差が生じる時間帯があることを利用して、内部欠陥を検知する手法である。
【0006】
また、ディジタル写真法は、可視領域の光によるコンクリート表面の画像から欠陥の有無や程度を把握する方法である。このディジタル写真法によれば、コンクリート、モルタル、タイル等のひび割れ、表面の欠損を発見することが可能である。
【0007】
しかしながら、上記の従来の赤外線写真法やディジタル写真法には次のような問題がある。
【0008】
(1)ひび割れや空洞部等の欠陥を検査、診断するためには欠陥部の有無、欠陥部の位置及び欠陥部の大きさを知る必要があるが、上記両写真法では欠陥部の有無を検出できてもその大きさを計測することが困難である。
【0009】
(2)ディジタル写真法の場合は画像のひずみを避けられないために、画像上で特定された欠陥部の位置が実際の建造物のどの位置に相当するのか特定するのに時間を要する。
【0010】
(3)また赤外線写真法の場合は、建造物の輪郭や目安となる箇所が画像上に現れないために、欠陥部を特定してもその部位が実際の建造物のどの位置に相当するのか特定するのに時間を要する。
【0011】
(4)建造物が大きなビル等の場合、部分画像を多数撮像しこれを合成することが必要になるが、建造物を正面から撮像した部分画像とある角度から撮像した部分画像とでは画面上の欠陥部の大きさが同じでも建造物の実際の欠陥部の大きさが異なるため、欠陥部の大きさ、形状を計測するのに時間を要する。
【0012】
(5)ディジタル写真法や赤外線写真法を個々に用いる方法では撮像した画像を単に表示するかあるいは拡大、縮小する程度の表示モードしかないために、欠陥部を健全部から区別すること自体に困難を伴うことも多々ある。
【0013】
【発明が解決しようとする課題】
本発明は上記のような従来の欠点を解決した赤外線構造物診断方法を提供することを目的とする。
【0014】
具体的には、本発明の目的は構造物のひび割れや空洞部等の欠陥部の有無及び位置やその大きさを容易に特定することが可能な赤外線構造物診断方法を提供することにある。
【0015】
【課題を解決するための手段】
本発明は上記の目的を達成するために、診断すべき対象の構造物の可視画像を撮像するディジタルカメラと、上記構造物の熱画像を撮像する赤外線カメラと、上記両カメラと上記構造物との距離に応じた電気信号を生ずる距離計とよりなる撮像部と、上記撮像部を搭載し、上記両カメラの視野を制御信号に応じて水平方向及び垂直方向に振る手段を有するパンチルト装置と、演算手段及び表示手段を有する処理装置とよりなる診断装置を用いて構造物の欠陥を診断する方法において、上記ディジタルカメラからの可視画像及び赤外線カメラからの熱画像を上記処理装置に取り込むステップと、取り込んだ可視画像及び熱画像を上記距離計からの電気信号及び上記カメラを水平方向及び垂直方向に振る角度に対応する信号により補正した画像を形成し、上記表示手段に表示するステップと、診断者が画面を見て欠陥部を指定するための欠陥部指定画面を上記表示手段に表示するステップと、診断者が上記欠陥部指定画面における欠陥部をポインティングデバイスでトレースしたときに上記欠陥部の大きさ及び面積の少なくとも一方を上記表示手段に表示するステップとにより構造物を診断することに一つの特徴がある。
【0016】
本発明の他の特徴は、上記欠陥部指定画面として熱画像と可視画像とを並置して示す第1の表示画面と、熱画像と可視画像とを重ね合わせて示す第2の表示画面と、可視画像のみを上記の第1及び第2の表示画面よりも高い解像度で示す第3の表示画面の少なくとも1つ以上を用意し、診断者により選択された表示画面を上記表示手段に表示するようにしたことにある。
【0017】
本発明の他の特徴は、診断者が熱画像の表示最低温度と表示最高温度を設定したときに、設定された温度範囲だけの画像を上記表示手段に表示するステップを有することにある。
【0018】
本発明の他の特徴は、熱画像と可視画像との混合比率を設定したときに、設定された比率で1つの画面に熱画像と可視画像とを重ね合わせて表示するステップを含むことにある。
【0019】
本発明の他の特徴は、診断すべき対象の構造物の可視画像を撮像するディジタルカメラと、上記構造物の熱画像を撮像する赤外線カメラと、上記両カメラと上記構造物との距離に応じた電気信号を生ずる距離計とよりなる撮像部と、上記撮像部を搭載し、上記両カメラの視野を制御信号に応じて水平方向及び垂直方向に振る手段を有するパンチルト装置と、演算手段及び表示手段を有する処理装置とよりなる診断装置を用いて構造物の欠陥を診断する方法において、上記両カメラにより構造物の部分画像を多数撮像し、該部分画像を上記処理装置に取り込むステップと、取り込んだ部分画像の歪を上記距離計からの信号及び上記カメラを水平方向及び垂直方向に振る角度に対応する信号に基づいて補正した後に、部分画像を合成して上記表示手段に表示するステップと、診断者が画面を見て欠陥部を指定するための欠陥部指定画面を上記表示手段に表示するステップと、診断者が上記欠陥部指定画面における構造物の欠陥部をポインティングデバイスでトレースしたときに上記欠陥部を前記合成した画像上に表示するステップにより構造物を診断することにある。
【0020】
本発明の他の特徴は、上記欠陥部の場所、大きさ及び面積を表すレポートを作成するステップを有することにある。
本発明の他の特徴及び利点は以下の実施例の記載から、更に明確に理解することができる。
【0021】
【発明の実施の形態】
以下、本発明方法に用いられる装置のシステム構成、制御プログラム及び操作方法について詳細に説明する。
【0022】
(1)システム構成
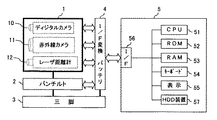
図1は本発明にかかる赤外線構造物診断方法に用いられる装置の構成を示すブロック図である。装置は撮像部1と、パンチルト雲台2及びパソコン等の処理装置5を含む。撮像部1は対象構造物の可視画像を撮像するためのディジタルカメラ10と、対象構造物の熱画像を撮像するための赤外線カメラ11と、上記両カメラ10、11と対象構造物の距離を測定するためのレーザ距離計12を有する。
【0023】
ディジタルカメラ10としては例えば有効画素数が6.1メガピクセル(3026×2018)程度のディジタルスチルカメラを用いることができる。また赤外線カメラ11としては例えば測定温度範囲が−20℃〜100℃、画像データ画素数が320(H)×240(V)ドット程度の市販されている赤外線カメラを使用することができる。またレーザ距離計12としては例えば測定範囲が0.3m〜100mで測定精度が±3〜5mm程度の市販されているレーザ距離計を使用することができる。上記のディジタルカメラ10、赤外線カメラ11の画像情報及びレーザ距離計12の距離データはインタフェース回路4を介してパソコン等の処理装置5に供給される。
【0024】
また上記ディジタルカメラ10、赤外線カメラ11及びレーザ距離計12は撮像部1の筺体に収納され、パンチルト電動雲台2に搭載されている。このパンチルト雲台2としては通常のパソコンにより制御可能であり、水平方向の振り角(パン)が±130°、垂直方向の振り角(チルト)が±45°程度の市販されている装置を用いることができる。このパンチルト雲台2及びバッテリを含むインタフェース回路4は三脚3に載置して使用される。
【0025】
一方、処理装置5としては例えばメモリが512MB以上、ハードディスクの容量が2GM以上でモニタの解像度が640×480ドット以上のカラーモニタを有する通常のパソコンを用いることができる。処理装置5はCPU(中央処理装置)51、プログラム等を格納するROM(固定記憶装置)52、撮像部1からのデータやプログラムの実行中のデータを一時保存するRAM(ランダムアクセス記憶装置)53、キーボード54、表示装置55、撮像部1との間でデータの送受信を行うインタフェース回路56及びハードディスク装置57を有する。
【0026】
次に図3を参照して本発明に用いられるシステムの機能について説明する。
ひび割れや空洞部等の欠陥部61を含む診断対象構造物6の熱画像及び可視画像のデータと距離データは撮像部1に取り込まれる。この撮像部1におけるパンチルト雲台2の水平振り角及び垂直振り角は処理装置5によりリモコン制御される。撮像部1に取り込まれたデータ、即ち熱画像、可視画像及び距離データに関するデータは処理装置5に送られる。この処理装置5は前述のROM52(図1)に後述の撮影システム部プログラムを有し、このプログラムを実行することにより熱画像及び可視画像を補正する。また熱画像から特定の温度範囲のデータのみを表示した画像(以下これを熱ISO表示画像と略す)を生成したり、熱画像と可視画像とを重畳した画像(以下これをオーバーラップ画像と略す)を生成してHDD装置57等の画像データファイル57Aに格納する。これらの補正画像、赤外ISO表示画像及びオーバーラップ画像は診断者7に提示され、診断者はこれらの画像を見ながら欠陥部を例えばマウス等のポインティングデバイスにより指示する。例えばひび割れの場合はマウスによりその上をなぞり、また空洞部の場合は健全部と空洞部の境界をマウスによりなぞるような操作を行う。撮影システムプログラムは欠陥部の長さや大きさを計算し、その欠陥部データをHDD装置57の欠陥部データファイル57Bに保存すると共に、欠陥部の長さや面積を診断者7に提示する。
【0027】
次に本発明方法に用いられるソフトウェアについて説明する。
本発明方法に用いられるソフトウェアを大別すると、撮影システム部のプログラムと、画像編集システム部のプログラムよりなる。図4は撮影システム部プログラム処理フローを示し、図5及び図6は画像編集システム部プログラムの処理フローを示す。以下それぞれの処理フローについて説明する。
【0028】
(2)撮影システム部プログラム
まずシステムを起動すると図7に示すようなコントロール画面が現れる。勿論この画面は単なる一例であり、本発明がこれに限定されるものではない。画面の表示領域301には本システムの撮像部1と対象構造物6との間の距離の測定結果が表示される。表示領域302にはカメラ10及び11の撮影角度として水平角と仰角が表示される。また表示領域303には赤外線カメラ11の制御情報として測定温度レンジ、赤外レンズの種類、温度レベルやセンス感度の設定情報が表示される。表示領域304には可視カメラの制御情報として画面サイズや可視レンズの種類が表示される。このコントロール画面において撮影データ入力開始ボタン305をクリックすると、図8に示すような熱画像310と可視画像311のリアルタイム画像が表示される。本画面に表示される画像はシステムがディジタルカメラ10及び赤外線カメラ11に一定の時間間隔で画像データを要求し、送られてきたデータをそのまま表示装置55に表示する(ステップ100)。
【0029】
画面を見ながら手動でパンチルト雲台2を動かすか、或いは処理装置5からの制御信号に基づいてパンチルト雲台を動かし、撮影対象を確定してシャッタボタン312を押すとディジタルカメラ10及び赤外線カメラ11の画像が取り込まれ、処理装置5のRAM53に保存される(図4のステップ106)。この画面にはレンズ収差補正ボタン313、パララックス補正ボタン314、欠陥部指定ボタン315が用意されており、以下説明するようにレンズ収差補正、パララックス補正、欠陥部指定画面への遷移が実行できる。
【0030】
(a)レンズ収差補正
図8のレンズ収差補正ボタン313を押すと、取り込んだ画像のレンズ歪補正の処理(図4のステップ101)が実行され、補正後の画像が図10の表示領域310、311に表示される。これはカメラレンズの歪曲収差と呼ばれる歪みを補正する処理であり、その一例が特願2002−379548に記載されている。即ち上記の歪曲収差は撮像後の画像が樽状に歪む現象であり、これを補正するためにアフィン変換と称される処理が施される。このアフィン変換は、ユークリッド幾何学的な線形変換と平行移動の組み合わせによる図形や形状の移動又は変形を行う方法であり、4×4の行列演算で表現できる移動、回転、左右反転、拡大、縮小、シアーの座標変換である。このアフィン変換は、元の図形で直線状に並ぶ点は変換後も直線状に並び、平行線は変換後も平行線であるなど、幾何学的性質が保たれる変換方式である。このため、レンズの歪みの性質(レンズの収差特質)をデータとして採取しておき、演算処理部5のROM52などに記憶させておけば、CPU51の演算により、レンズの収差による歪みを除去した画像を得ることができる。補正後のデータは処理装置のメモリ57における画像データファイル57Aに保存される(ステップ107)。
【0031】
(b)パララックス補正
次に図10の画面においてパララックス補正ボタン314を押すと、パララックス補正処理(図4のステップ102)が実行される。このパララックス補正は先願の特願2002−379548に詳述されている。即ち本システムにおける撮像部1は、筺体にディジタルカメラ10と赤外線カメラ11が並置して収納されているため、ディジタルカメラ10の撮影範囲と、赤外線カメラ11の撮影範囲の間にズレが生じる。このズレを、視差(パララックス)という。
【0032】
一例として図9に示すように、ディジタルカメラ10と赤外線カメラ11が並べて配置されている場合を考える。カメラのレンズ画角は、いずれも水平方向が30°、垂直方向が20°であるとする。また、ディジタルカメラ10と赤外線カメラ11の水平方向の位置ズレ量を例えば10cmとすると、レンズの前方50cmにある被写体を撮影するときには、水平方向の撮影範囲の長さは、26.8cmとなり、垂直方向の撮影範囲の長さは、17.6cmとなる。この場合、水平方向のカメラの位置ズレ量(10cm)は、水平方向の撮影範囲の長さ26.8cmに対して、37.3%という大きな比率となることがわかる。以下、この比率(%)をパララックス量(撮影範囲全体に対する画像のズレの割合)という。
【0033】
一方、被写体までの距離が5mの場合には、水平方向の撮影範囲の長さは、2.68mとなり、垂直方向の撮影範囲の長さは、1.76mとなる。この場合、水平方向のカメラの位置ズレ量(0.1m)のパララックス量は、水平方向の撮影範囲の長さ2.68mに対して、3.73%となり、パララックス量の値は相対的に小さいことがわかる。
【0034】
即ち、ディジタルカメラ10と赤外線カメラ11の位置ズレの影響は、被写体までの距離によって異なり、撮影する物体が近い場合には非常に大きな影響がでるが、遠方の物体を撮影する場合には、殆ど無視できる。
【0035】
上記したディジタルカメラ10と赤外線カメラ11の位置ズレ長さをdとし、水平方向の撮影範囲をA1とすると、パララックス量をPは、次式(1)によって算出できる。この計算は、CPU51によって実行される。
P(%)=(d/A1)×100 ………(1)
水平方向のレンズ画角が等しく、かつ垂直方向のレンズ画角が等しい2台のカメラを平行に並べて同一方向の被写体を撮影した場合、2台のうちのいずれかのカメラの撮影画像を、水平方向にパララックス量の分だけ移動させることにより、2台のカメラの撮影画像を重ね合わせ、合致させた画像を合成することができる。
【0036】
(c)欠陥部の指定画面の表示
図8及び図10に示すレンズ収差補正画面及びパララックス補正画面の何れから欠陥部指定画面ボタン315を押下すると、欠陥部を指定するために用意された3つの欠陥部指定画面を表示することができる。
【0037】
第1の欠陥部指定画面は赤外・可視画像欠陥部指定画面で、図11に示すように表示領域310に熱画像を、また表示領域311に可視画像を並べて表示するモードである。
【0038】
第2の欠陥部指定画面はオーバーラップ画像欠陥部指定画面で、図12に示すように1つの表示領域330の中に可視画像と熱画像とを重ね合わせて表示するモードである。この画面でスクロールバー320を移動させることにより重ね合わせる熱画像及び可視画像の表示濃度比率を可変にすることができる。
【0039】
第3の欠陥部指定画面は撮影現画像欠陥部指定画面で、図13に示すように表示領域340に可視画像のみを撮影時の解像度で表示するモードである。即ち診断する構造物の表面のひび割れなどを調べるために解像度の高い可視画像を用いて欠陥部の指摘を容易にしている。診断者はこの3つの画面を見ながらマウス等のポイントデバイスを用いてひび割れや空洞部などの欠陥部を指定する。1つの画面で指定した欠陥は、リアルタイムに他の2画面にも反映される。欠陥部を指定した情報と、欠陥箇所の情報はリンクしたまま保存される(ステップ109)。
【0040】
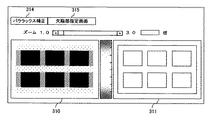
(d)ISO表示
図14の表示画面においてISO表示ボタン318を押下すると、図15に示す画面に遷移する。この画面にはスクロールバー351、352を移動することにより、熱画像の表示最低温度及び表示最高温度が設定される。この温度が設定されると表示領域350には設定された温度範囲だけの画像がカラー表示される。
【0041】
(e)数量積算
次に図4のステップ104においては、診断者が上述の欠陥部指定画面においてひび割れや浮きなどの欠陥部と認識された部分の上をマウスなどのポインティングデバイスでなぞることによりひび割れの場合は長さが、また浮き(空洞部)の場合は面積がCPU51により自動計算される。この自動計算の方法については特願昭2002−379548に詳細に説明されている。
【0042】
即ちレーザ距離計12は、測定対象物とレーザ距離計12の間の距離をリアルタイムで測定し、演算処理部5に出力する。演算処理部5のCPU51は、これにより、測定対象物とディジタルカメラ10の間の距離Lをリアルタイムで演算し、RAM54等に記憶する。
【0043】
図16に示す角度θ1は、ディジタルカメラ10の水平方向のレンズ画角(画像の両端の間の角度)を表している。レンズ画角θ1は、ディジタルカメラ10の既知の値であり、演算処理部5のROM52に格納されている。
【0044】
図16に示す距離A1は、ディジタルカメラ10が、距離Lの場合に撮像できる水平方向の最大範囲を示す値である。この距離A1は、上記した距離Lとレンズ画角θ1から下式(2)により計算することができる。この計算は、演算処理部5のCPU51によって実行される。
A1=2L×tan(θ1/2) ………(2)
一方、ディジタルカメラ10が撮影した画像は、画素によって構成されており、水平方向の画素数mと、垂直方向の画素数nは、既知の値である。この場合は、ディジタルカメラ10が撮影した画像は、m×n個の画素の集合により構成されることになる。
【0045】
従って、この場合には、測定対象物の水平方向撮影範囲の距離A1は、ディジタルカメラ10内の画像上では、m個の画素に対応している。このため、水平方向の1個の画素は、測定対象物の水平方向撮影範囲の距離A1において、
a1=A1/m ………(3)
で表される距離a1に相当している。
【0046】
例えば、測定対象物がコンクリート表面であった場合で、欠陥部(被写体)の水平方向距離(水平方向長さ)が図16におけるD1の場合には、ディジタルカメラ10の画像上での水平方向の画素の個数を検出する。この画素個数が5であった場合には、5×a1の演算を行うことにより、D1の値を算出することができる。この計算は、演算処理部5のCPU51によって実行される。
【0047】
上記の方法とまったく同様にして、ディジタルカメラ10の測定対象物における被写体の垂直方向(上記したA1に対して垂直な方向)の距離又は長さについても、ディジタルカメラ10の画像上での垂直方向の画素の個数から、算出することができる。この場合、ディジタルカメラ10の垂直方向のレンズ画角がθ2である場合には、上記(2)におけるθ1のかわりにθ2を代入することにより、測定対象物の垂直方向撮影範囲の距離を算出することができる。この計算は、演算処理部5のCPU51によって実行される。
【0048】
また、上記の方法とまったく同様にして、赤外線カメラ11の測定対象物における被写体の水平方向の距離又は長さ、赤外線カメラ11の測定対象物における被写体の垂直方向の距離又は長さについても、赤外線カメラ11の画像上での水平方向の画素数、又は垂直方向の画素数から、算出することができる。この計算は、演算処理部5のCPU51によって実行される。
【0049】
上記のような演算処理により、ディジタルカメラ10又は赤外線カメラ11で撮像した欠陥、例えばコンクリートの浮き、ひび割れの実際の長さや幅、面積等を算出することができる。
【0050】
上記のようにして認識された欠陥部のひび割れや浮きには、それぞれ図17に例示するように連番が付され、長さや面積のデータが集計されて演算処理部5のRAM53に保存される(ステップ110)。
【0051】
(3)画像編集プログラム
次に本発明装置を用いて、現場で撮影した可視画像及び熱画像の画像編集の処理フローについて説明する。
【0052】
例えば大きなビルの劣化診断を行う場合には、ビルに近接した所定の場所に三脚3を設置し、パンチルト装置2を制御してビルの部分画像を次々に処理装置5に取り込む。この取り込んだ画像は前述のようにレンズ歪補正やパララックス補正などの処理が施されるが、更に診断者に提示するためのデータを得るために次のような画像編集の処理が行われる。
【0053】
図5は可視画像の編集処理の手順を示す処理フローである。まずステップ401においては取り込んだ多数の画像の一覧を小画面に表示する所謂サムネイル表示が行われる。そして撮影した画像の画像ファイルをインポートする(ステップ402)。
【0054】
次にステップ403においては個別の画像がズーム表示され、各画像のサイズが変更される(ステップ404)。更に画像の回転角度をオブジェクト毎に修正して各画像の回転を補正する(ステップ405)。
【0055】
更にステップ406においては画像のあおり(斜めから取った画像の親近感)を補正する。図18に示すようにカメラ10から構造物6を撮影した場合、構造物6に例えば同じ大きさの窓60,62,64が存在したとしても、カメラ10からの距離L及び角度θが異なるために画像上には異なる大きさとして撮影される。従って同じ大きさの欠陥部が建造物の正面と隅部にあったとしても異なる大きさとして表示される。従って建造物の設計図面と同じような画像を表示するには画像のあおりを補正する必要がある。本発明のシステムではカメラから建造物6までの距離のデータがあるので上記のような補正は極めて容易である。即ち図18の例では、下式(4)と(5)のa1とa2が同じ大きさとなるように画面を補正すればよい。
a1=tan(θ1/2)・L1 ………(4)
a2=tan(θ2/2)・L2 ………(5)
次にステップ407,408では各オブジェクト毎に画像の明度・コントラスト・ガンマ値及びシャープネスの調整を行い、更に各オブジェクトを適宜移動し(ステップ409)、結合して一致の画像にする(ステップ410)。更にその画像をトリミングし(ステップ411)、建造物の図面と画像の一致するポイントを指定することにより図面と可視画像とを合成する(ステップ412)。
【0056】
一方、熱画像の画像編集は図6に示す処理フローに従って実行される。同図でステップ501〜506の処理は図5のステップ401〜406の処理と同様である。ステップ507においては熱画像のゲイン及び中心温度を調整する。次のステップ508では前述の撮影部システムプログラムと同様に、所定の温度範囲のみをカラー表示し、その他をグレースケール化して表示する。この後、各オブジェクトを移動させ(ステップ509)、これらを一致の画像に結合する(ステップ510)。そして画像をトリミングし(ステップ511)、建造物の図面と画像の一致するポイントを指定することにより図面と画像を合成する。図19は本発明システムにおける画像編集プログラム全体の処理フローを示す。同図においてステップ201は可視画像レイヤの作成の処理を示し、その具体的内容は上述の図5の処理である。つまり図18のステップ202,203及び204を具体化すると図5のステップ401〜412の処理になり、最終的に建造物の図面と可視画像の合成データが生成されてこれがファイルに保存される(ステップ205)。
【0057】
更にステップ206は熱画像レイヤ作成の処理を示し、その具体的内容は上述の図6の処理である。つまり図19のステップ207,208及び209を具体化すると図6のステップ501〜512の処理になり、最終的に建造物の図面と熱画像の合成データが生成されてこれがファイルに保存される(ステップ210)。
【0058】
次にステップ211では上記のようにして生成された可視画像及び熱画像を表示し、画像上のひび割れ、浮き、空洞等の欠陥部をマウス等のポインティングデバイスでトレースすることによりそれらの長さ、面積を積算し(ステップ212)、適当なソフトウェアで閲覧可能なファイル形式で保存する(ステップ213)。以上のようにして編集された画像データは図1の処理装置5のRAM53又はHDD装置57に格納され、必要に応じて表示装置55に表示することができる。例えば図20に示すように建造物にひび割れ361及び浮き362があった場合、図17のNo.2及びNo.8のような長さ及び面積のデータと共に劣化集積表としてメモリに格納されると共に、図20の画面の表示領域363、364に示すようにひび割れ361の長さ552mmが青色で、浮き362の面積32013mm2が赤色で表示される。従ってこの画面から欠陥部を一目で認識することが可能になる。
【0059】
以上本発明の一実施形態について説明したが、本発明はこの実施形態に限定されるものではなく、基本的な技術思想を変更しない範囲で一部の機能を変えたり追加したりすることも本発明の範囲に含まれる。例えばひび割れや浮き等の欠陥部を表示装置に表示するだけでなく、これをプリントして顧客に提示するレポートを作成する機能を追加することも容易である。このレポートは所望により可視画像、熱画像などの画像情報と欠陥部の場所を示す情報及び欠陥部の長さ、面積などのデータを含んだものとすることができる。
【0060】
【発明の効果】
以上の説明によって明らかなように、本発明によれば、診断すべき対象の構造物の可視画像を撮像するディジタルカメラと、上記構造物の熱画像を撮像する赤外線カメラと、上記両カメラと上記構造物との距離に応じた電気信号を生ずる距離計とよりなる撮像部と、上記撮像部を搭載し、上記両カメラの視野を水平方向及び垂直方向に振る手段を有するパンチルト装置と、演算手段及び表示手段を有する処理装置とよりなる診断装置を用いて構造物の欠陥を診断する方法において、上記ディジタルカメラからの可視画像及び赤外線カメラからの熱画像と上記距離計からの信号を上記処理装置に取り込むステップと、取り込んだ可視画像及び熱画像を距離信号及び水平、垂直の角度信号により補正した画像を形成し、上記表示手段に表示するステップと、診断者が画面を見て欠陥部を指定するための欠陥部指定画面を上記表示手段に表示するステップと、診断者が上記欠陥部指定画面における欠陥部をポインティングデバイスでトレースしたときに上記欠陥部の大きさ及び面積の少なくとも一方を上記表示手段に表示するステップとにより構造物のひび割れや空洞部の有無、その位置及び大きさ、面積を極めて容易に診断することができる。
【0061】
また、上記欠陥部指定画面として熱画像と可視画像とを並置して示す第1の表示画面と、熱画像と可視画像とを重ね合わせて示す第2の表示画面と、可視画像のみを上記の第1及び第2の表示画面よりも高い解像度で示す第3の表示画面の少なくとも1つ以上を用意し、診断者により自由に選択した画面を表示するようにした場合はさらに、使い勝手のよい診断方法を提供することができる。
【0062】
また、診断者が熱画像の表示最低温度と表示最高温度を設定し、設定された温度範囲だけの画像を表示するようにした場合は、欠陥の検出をより容易にするのに効果がある。
【図面の簡単な説明】
【図1】本発明にかかる赤外線構造物診断方法に用いられる装置の構成を示すブロック図である。
【図2】赤外線写真法による欠陥部検出の原理説明図である。
【図3】本発明方法の機能を説明するための説明図である。
【図4】本発明方法に用いられる撮影システム部プログラムの処理フロー図である。
【図5】本発明方法に用いられる画像編集システム部プログラムの可視画像の処理フロー図である。
【図6】本発明方法に用いられる画像編集システム部プログラムの熱画像の処理フロー図である。
【図7】撮影システム部プログラムによる初期画面の説明図である。
【図8】本発明方法における表示画面の説明図である。
【図9】本発明方法におけるパララックス補正の説明図である。
【図10】本発明方法における表示画面の説明図である。
【図11】本発明方法における表示画面の説明図である。
【図12】本発明方法における表示画面の説明図である。
【図13】本発明方法における表示画面の説明図である。
【図14】本発明方法における表示画面の説明図である。
【図15】本発明方法における表示画面の説明図である。
【図16】本発明方法における欠陥部の数量積算の説明図である。
【図17】本発明方法における欠陥部データの集計の一例を示す説明図である。
【図18】本発明方法におけるあおり補正の説明図である。
【図19】本発明方法に用いられる画像編集システム部プログラムの全体の処理フロー図である。
【図20】本発明方法における表示画面の説明図である。
【符号の説明】
1:撮像部
2:パンチルト雲台
3:三脚
4:インタフェース回路
5:処理装置
6:診断対象構造物
10:ディジタルカメラ
11:赤外線カメラ
12:レーザ距離計
51:CPU
52:ROM
53:RAM
54:キーボード
55:表示装置
56:インタフェース回路
57:HDD装置
Claims (6)
- 診断すべき対象の構造物の可視画像を撮像するディジタルカメラと、上記構造物の熱画像を撮像する赤外線カメラと、上記両カメラと上記構造物との距離に応じた電気信号を生ずる距離計とよりなる撮像部と、上記撮像部を搭載し、上記両カメラの視野を制御信号に応じて水平方向及び垂直方向に振る手段を有するパンチルト装置と、演算手段及び表示手段を有する処理装置とよりなる診断装置を用いて構造物の欠陥を診断する方法において、上記ディジタルカメラからの可視画像及び赤外線カメラからの熱画像を上記処理装置に取り込むステップと、取り込んだ可視画像及び熱画像を、上記距離計からの電気信号及び上記カメラを水平方向及び垂直方向に振る角度に対応する信号により補正した画像を形成し、上記表示手段に表示するステップと、診断者が画面を見て欠陥部を指定するための欠陥部指定画面を上記表示手段に表示するステップと、診断者が上記欠陥部指定画面における欠陥部をポインティングデバイスでトレースしたときに上記欠陥部の大きさ及び面積の少なくとも一方を上記表示手段に表示するステップを有することを特徴とする赤外線構造物診断方法。
- 請求項1において、上記欠陥部指定画面として熱画像と可視画像とを並置して示す第1の表示画面と、熱画像と可視画像とを重ね合わせて示す第2の表示画面と、可視画像のみを上記の第1及び第2の表示画面よりも高い解像度で示す第3の表示画面の少なくとも1つ以上が用意され、診断者により選択された表示画面が上記表示手段に表示されることを特徴とする赤外線構造物診断方法。
- 請求項1において、熱画像の表示最低温度と表示最高温度が設定されたときに、設定された温度範囲だけの画像を上記表示手段に表示するステップを有することを特徴とする赤外線構造物診断方法。
- 請求項1において、熱画像と可視画像との混合比率が設定されたときに、設定された比率で1つの画面に熱画像と可視画像とを重ね合わせて表示するステップを含むことを特徴とする赤外線構造物診断方法。
- 診断すべき対象の構造物の可視画像を撮像するディジタルカメラと、上記構造物の熱画像を撮像する赤外線カメラと、上記両カメラと上記構造物との距離に応じた電気信号を生ずる距離計とよりなる撮像部と、上記撮像部を搭載し、上記両カメラの視野を制御信号に応じて手水平方向及び垂直方向に振る手段を有するパンチルト装置と、演算手段及び表示手段を有する処理装置とよりなる診断装置を用いて構造物の欠陥を診断する方法において、上記両カメラにより構造物の部分画像を多数撮像し、該部分画像を上記処理装置に取り込むステップと、取り込んだ部分画像の歪を上記距離計からの信号及び上記カメラを水平及び垂直方向に振る角度に対応する信号に基づいて補正した後に、部分画像を合成して上記表示手段に表示するステップと、診断者が画面を見て欠陥部を指定するための欠陥部指定画面を上記表示手段に表示するステップと、診断者が上記欠陥部指定画面における構造物の欠陥部をポインティングデバイスでトレースしたときに上記欠陥部を前記合成した画像上に表示するステップを有することを特徴とする赤外線構造物診断方法。
- 請求項1又は5において、上記欠陥部の場所、大きさ及び面積を表すレポートを作成するステップを有することを特徴とする赤外線構造物診断方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003178893A JP2005016995A (ja) | 2003-06-24 | 2003-06-24 | 赤外線構造物診断方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003178893A JP2005016995A (ja) | 2003-06-24 | 2003-06-24 | 赤外線構造物診断方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005016995A true JP2005016995A (ja) | 2005-01-20 |
| JP2005016995A5 JP2005016995A5 (ja) | 2006-08-03 |
Family
ID=34180349
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003178893A Pending JP2005016995A (ja) | 2003-06-24 | 2003-06-24 | 赤外線構造物診断方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005016995A (ja) |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013133470A1 (ko) * | 2012-03-06 | 2013-09-12 | 충남대학교 산학협력단 | 열화상 내에서 특정부위 추적이 가능한 열상시스템 및 이를 이용한 특정부위의 추적방법 |
| JP2013200137A (ja) * | 2012-03-23 | 2013-10-03 | Omron Corp | 赤外線温度測定装置、赤外線温度測定方法、および、赤外線温度測定装置の制御プログラム |
| JP2014148847A (ja) * | 2013-02-01 | 2014-08-21 | East Japan Railway Co | コンクリート構造物補修方法、コンクリート構造物補修構造、及びコンクリート構造物補修システム |
| CN104280402A (zh) * | 2014-09-28 | 2015-01-14 | 广东惠利普路桥信息工程有限公司 | 基于图像分析的路桥质量诊断系统 |
| JP2015014609A (ja) * | 2010-04-13 | 2015-01-22 | シーメンス アクチエンゲゼルシヤフトSiemens Aktiengesellschaft | サーモグラフィ検査において情報を対象物へ投影する装置および方法 |
| WO2015188203A3 (en) * | 2014-06-05 | 2016-03-10 | Loretz Michael Rodger | System and method for method remote assessment of quality of construction |
| CN107843348A (zh) * | 2017-12-14 | 2018-03-27 | 东方电气集团东方锅炉股份有限公司 | 一种吸热器能流密度测量装置及测量方法 |
| JP6337226B1 (ja) * | 2018-03-02 | 2018-06-06 | 株式会社エネルギア・コミュニケーションズ | 異常箇所検出システム |
| JP6362750B1 (ja) * | 2017-09-13 | 2018-07-25 | 株式会社エネルギア・コミュニケーションズ | 異常箇所検出システム |
| WO2018155267A1 (ja) | 2017-02-23 | 2018-08-30 | パナソニックIpマネジメント株式会社 | 画像表示装置及び画像表示方法並びにプログラム |
| CN108731819A (zh) * | 2017-04-18 | 2018-11-02 | 亚迪电子股份有限公司 | 热像检测装置 |
| JP6441421B1 (ja) * | 2017-07-28 | 2018-12-19 | 株式会社TonTon | 外面材調査システム |
| JP2021173524A (ja) * | 2020-04-17 | 2021-11-01 | 新東工業株式会社 | 画像表示装置、画像表示方法及び制御プログラム |
| WO2021241533A1 (ja) * | 2020-05-29 | 2021-12-02 | 富士フイルム株式会社 | 撮影システム、撮影方法、撮影プログラム、及び情報取得方法 |
| WO2023047826A1 (ja) * | 2021-09-27 | 2023-03-30 | 富士フイルム株式会社 | 画像処理装置、撮像装置、画像処理方法、及び画像処理プログラム |
| CN116164653A (zh) * | 2023-04-23 | 2023-05-26 | 安徽建筑大学 | 一种道路桥梁混凝土结构检测装置 |
| JP7517114B2 (ja) | 2020-11-30 | 2024-07-17 | 新東工業株式会社 | 画像表示装置 |
-
2003
- 2003-06-24 JP JP2003178893A patent/JP2005016995A/ja active Pending
Cited By (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015014609A (ja) * | 2010-04-13 | 2015-01-22 | シーメンス アクチエンゲゼルシヤフトSiemens Aktiengesellschaft | サーモグラフィ検査において情報を対象物へ投影する装置および方法 |
| WO2013133470A1 (ko) * | 2012-03-06 | 2013-09-12 | 충남대학교 산학협력단 | 열화상 내에서 특정부위 추적이 가능한 열상시스템 및 이를 이용한 특정부위의 추적방법 |
| JP2013200137A (ja) * | 2012-03-23 | 2013-10-03 | Omron Corp | 赤外線温度測定装置、赤外線温度測定方法、および、赤外線温度測定装置の制御プログラム |
| JP2014148847A (ja) * | 2013-02-01 | 2014-08-21 | East Japan Railway Co | コンクリート構造物補修方法、コンクリート構造物補修構造、及びコンクリート構造物補修システム |
| GB2542077B (en) * | 2014-06-05 | 2020-09-23 | Rodger Loretz Michael | System and method for remote assessment of quality of construction |
| WO2015188203A3 (en) * | 2014-06-05 | 2016-03-10 | Loretz Michael Rodger | System and method for method remote assessment of quality of construction |
| GB2542077A (en) * | 2014-06-05 | 2017-03-08 | Rodger Loretz Michael | System and method for remote assessment of quality of construction |
| CN104280402A (zh) * | 2014-09-28 | 2015-01-14 | 广东惠利普路桥信息工程有限公司 | 基于图像分析的路桥质量诊断系统 |
| US11037334B2 (en) | 2017-02-23 | 2021-06-15 | Panasonic Intellectual Property Management Co., Ltd. | Image display device, image display method, and program |
| WO2018155267A1 (ja) | 2017-02-23 | 2018-08-30 | パナソニックIpマネジメント株式会社 | 画像表示装置及び画像表示方法並びにプログラム |
| CN108731819A (zh) * | 2017-04-18 | 2018-11-02 | 亚迪电子股份有限公司 | 热像检测装置 |
| JP2018179956A (ja) * | 2017-04-18 | 2018-11-15 | 亞迪電子股▲ふん▼有限公司 | 熱検出装置 |
| CN108731819B (zh) * | 2017-04-18 | 2020-06-09 | 亚迪电子股份有限公司 | 热像检测装置 |
| JP6441421B1 (ja) * | 2017-07-28 | 2018-12-19 | 株式会社TonTon | 外面材調査システム |
| JP2019027908A (ja) * | 2017-07-28 | 2019-02-21 | 株式会社TonTon | 外面材調査システム |
| JP6362750B1 (ja) * | 2017-09-13 | 2018-07-25 | 株式会社エネルギア・コミュニケーションズ | 異常箇所検出システム |
| WO2019054075A1 (ja) * | 2017-09-13 | 2019-03-21 | 株式会社エネルギア・コミュニケーションズ | 異常箇所検出システム |
| JP2019053446A (ja) * | 2017-09-13 | 2019-04-04 | 株式会社エネルギア・コミュニケーションズ | 異常箇所検出システム |
| CN107843348A (zh) * | 2017-12-14 | 2018-03-27 | 东方电气集团东方锅炉股份有限公司 | 一种吸热器能流密度测量装置及测量方法 |
| CN107843348B (zh) * | 2017-12-14 | 2023-05-30 | 东方电气集团东方锅炉股份有限公司 | 一种吸热器能流密度测量装置及测量方法 |
| JP2019053024A (ja) * | 2018-03-02 | 2019-04-04 | 株式会社エネルギア・コミュニケーションズ | 異常箇所検出システム |
| JP6337226B1 (ja) * | 2018-03-02 | 2018-06-06 | 株式会社エネルギア・コミュニケーションズ | 異常箇所検出システム |
| JP2021173524A (ja) * | 2020-04-17 | 2021-11-01 | 新東工業株式会社 | 画像表示装置、画像表示方法及び制御プログラム |
| JP7367597B2 (ja) | 2020-04-17 | 2023-10-24 | 新東工業株式会社 | 画像表示装置、画像表示方法及び制御プログラム |
| WO2021241533A1 (ja) * | 2020-05-29 | 2021-12-02 | 富士フイルム株式会社 | 撮影システム、撮影方法、撮影プログラム、及び情報取得方法 |
| JP7436656B2 (ja) | 2020-05-29 | 2024-02-21 | 富士フイルム株式会社 | 撮影システム、撮影方法、撮影プログラム、及び情報取得方法 |
| JP7517114B2 (ja) | 2020-11-30 | 2024-07-17 | 新東工業株式会社 | 画像表示装置 |
| WO2023047826A1 (ja) * | 2021-09-27 | 2023-03-30 | 富士フイルム株式会社 | 画像処理装置、撮像装置、画像処理方法、及び画像処理プログラム |
| CN116164653A (zh) * | 2023-04-23 | 2023-05-26 | 安徽建筑大学 | 一种道路桥梁混凝土结构检测装置 |
| CN116164653B (zh) * | 2023-04-23 | 2023-12-15 | 安徽建筑大学 | 一种道路桥梁混凝土结构检测装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005016991A (ja) | 赤外線構造物診断システム | |
| JP5097765B2 (ja) | 計測方法および計測プログラムならびに計測装置 | |
| JP2005016995A (ja) | 赤外線構造物診断方法 | |
| JP4232064B2 (ja) | 画像処理を用いたひび割れ評価装置 | |
| TWI309751B (en) | Imaging device and method, computer program product on computer-readable medium, and imaging system | |
| JP2005037366A (ja) | 赤外線構造物診断システム及び赤外線構造物診断方法 | |
| JP3994217B2 (ja) | 画像処理による異常点位置検出システム | |
| JP5586765B2 (ja) | カメラキャリブレーション結果検証装置および方法 | |
| CN114792309A (zh) | 信息处理装置和信息处理装置的控制方法 | |
| JP7412983B2 (ja) | 情報処理装置、情報処理方法、及びプログラム | |
| JP2005300179A (ja) | 赤外線構造物診断システム | |
| JP5079547B2 (ja) | カメラキャリブレーション装置およびカメラキャリブレーション方法 | |
| JPWO2019003796A1 (ja) | 画像合成方法、画像合成装置、及び記録媒体 | |
| JPWO2019150799A1 (ja) | 補修長の決定方法及び補修長の決定装置 | |
| CN102589529B (zh) | 扫描近景摄影测量方法 | |
| JP5183152B2 (ja) | 画像処理装置 | |
| TW200908017A (en) | Structure visual inspection apparatus and inspection method therefor | |
| JP4326864B2 (ja) | コンクリート点検システムのハイビジョン画像処理方法 | |
| JP4198536B2 (ja) | 物体撮影装置、物体撮影方法及び物体撮影プログラム | |
| JPH11337322A (ja) | 2次元画像比較による外観の測定方法および装置 | |
| JP4723777B2 (ja) | 画像検査方法および画像検査装置 | |
| JP2005310044A (ja) | データ処理装置、データ処理方法、及びデータ処理プログラム | |
| WO2020145004A1 (ja) | 撮影ガイド装置 | |
| JP5149403B2 (ja) | 画像検査方法および画像検査装置 | |
| JP2004318790A (ja) | 構造物用検査装置及び検査方法、並びに記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060616 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060616 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20071023 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080410 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20080731 |