JP2004334283A - 車両用運転支援装置 - Google Patents
車両用運転支援装置 Download PDFInfo
- Publication number
- JP2004334283A JP2004334283A JP2003125199A JP2003125199A JP2004334283A JP 2004334283 A JP2004334283 A JP 2004334283A JP 2003125199 A JP2003125199 A JP 2003125199A JP 2003125199 A JP2003125199 A JP 2003125199A JP 2004334283 A JP2004334283 A JP 2004334283A
- Authority
- JP
- Japan
- Prior art keywords
- information
- support
- vehicle
- situation
- driving support
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





















Landscapes
- Regulating Braking Force (AREA)
- Traffic Control Systems (AREA)
- Navigation (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
【課題】支援決定処理のオンラインでの再構成を容易にすることで、効果的な運転者の支援を実施することができる車両用運転支援装置を提供すること。
【解決手段】車両の走行時における状況を検出する状況検出手段10と、運転者の支援方法を決定する運転支援決定手段13と、前記運転支援決定手段13の決定した支援方法に基づき、車両の制御を行う制御手段14と、を備えた車両用運転支援装置において、前記運転支援決定手段13が出力した情報を保持するとともに、前記状況検出手段10が前記情報を参照することを許可した第一記憶手段11と、前記状況検出手段10が出力した情報を保持するとともに、前記運転支援決定手段13が前記情報を参照することを許可した第二記憶手段12とを備えた構成とした。
【選択図】 図1
【解決手段】車両の走行時における状況を検出する状況検出手段10と、運転者の支援方法を決定する運転支援決定手段13と、前記運転支援決定手段13の決定した支援方法に基づき、車両の制御を行う制御手段14と、を備えた車両用運転支援装置において、前記運転支援決定手段13が出力した情報を保持するとともに、前記状況検出手段10が前記情報を参照することを許可した第一記憶手段11と、前記状況検出手段10が出力した情報を保持するとともに、前記運転支援決定手段13が前記情報を参照することを許可した第二記憶手段12とを備えた構成とした。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は、運転者の安全な車両運転を実現することを目的とする車両用運転支援装置の技術分野に属する。
【0002】
【従来の技術】
運転者の安全な車両運転を実現することを目的として、様々な車両用運転支援装置が発明されている。
【0003】
例えば、車両用操舵制御装置において、自車両の走行経路上に曲路があった場合、その曲路の度合いに応じて、操舵量に対する転舵量の伝達比を変更する技術が知られている(例えば、特許文献1参照)。
【0004】
また、プレビューブレーキシステムにおいて、緊急時において、運転者のブレーキ踏力に対する制動力を、アシスト力を付加することで、自動的に増加させる技術が知られている(例えば、特許文献2参照)。
【0005】
さらに、路面状況推定装置として、状況検出装置としてのセンサの検知する情報を予め与えられた状況に当てはめる技術が知られている(例えば、特許文献3参照)。
【0006】
【特許文献1】
特開平11−310146号公報
【特許文献2】
特開2000−62587号公報
【特許文献3】
特開2001−134889号公報。
【0007】
【発明が解決しようとする課題】
しかしながら、従来の車両用運転支援装置にあっては、以下のような問題点があった。
【0008】
特開平11−310146号公報に記載の車両用操舵制御装置や特開2000−62587号公報に記載のプレビューブレーキシステムには、状況を検出する状況検出装置が備わっている。例えば、前者ではGPSや地図情報に基づいて曲路状況を検出し、後者ではレーザレーダで撮像された前方の車両状況を検出している。これら状況検出装置が検出した状況に基づいて運転者の支援は行われる。
【0009】
このような運転支援装置では、特に支援決定の処理において、状況検出装置の検出する状況や検知の精度が予め想定した範囲にあることを前提として開発されている。
【0010】
従って、状況検出装置の検知特性を変更したり、状況検出装置を増やしたりする必要があった場合には、運転支援装置における支援決定の処理を、改めて構築しなおす必要があった。
【0011】
この運転支援装置における支援決定の処理をオンラインで再構成することは、車両に備わった他の運転支援装置の処理との矛盾を排除したり、他の状況検出装置の検出特性を考慮したりする必要があり、一般には解決が極めて困難な課題とされている。
【0012】
また、特開2001−134889号公報に記載の路面状況推定装置においては、センサの検知する情報を予め与えられた状況に当てはめることで、周囲環境に関する詳細な情報を支援の処理に取り込むことができなくなった。このため、運転者の嗜好や特性に応じて警報を発するタイミングの補正したり、時間的、空間的に様々な段階にて支援を行ったりすることが困難になった。
【0013】
本発明は、上記課題に着目してなされたもので、支援決定処理のオンラインでの再構成を容易にすることで、効果的な運転者の支援を実施することができる車両用運転支援装置を提供することを目的とする。
【0014】
【課題を解決するための手段】
上記目的を達成するため、本発明では、
状況検出手段と、運転支援決定手段と、車両の制御を行う制御手段と、を有する車両用運転支援装置において、
前記運転支援決定手段が出力した情報を保持するとともに、前記状況検出手段が前記情報を参照することを許可した第一記憶手段と、
前記状況検出手段が出力した情報を保持するとともに、前記運転支援決定手段が前記情報を参照することを許可した第二記憶手段と、
を備えた手段とした。
【0015】
【発明の効果】
よって、本発明の車両用運転支援装置にあっては、互いに独立して動作する状況検出手段と運転支援決定手段が、第一記憶手段、及び、第二記憶手段を介して協調的に動作し、状況検出手段の検出特性が時々刻々と変化したり、状況検出手段の数が増減したりした場合においては、支援決定の処理をオンラインで再構成しなくても継続的に支援を実施することが可能であり、かつ、運転者の嗜好や技量が変化して支援決定の処理をオンラインで再構成したい場合においては、状況検出手段の特性を鑑みることなく再構成することが可能であることで、効果的な運転者の支援を実施することができる。
【0016】
【発明の実施の形態】
以下、本発明の車両用運転支援装置を実現する実施の形態を、図面に示す第1実施例〜第3実施例に基づいて説明する。
図1は本発明の車両用運転支援装置を示すクレーム対応図である。車両の走行時における状況を検出する状況検出手段10と、運転者の支援方法を決定する運転支援決定手段13と、前記運転支援決定手段13の決定した支援方法に基づき、車両の制御を行う制御手段14と、を有する車両用運転支援装置において、前記運転支援決定手段13が出力した情報を保持するとともに、前記状況検出手段10が前記情報を参照することを許可した第一記憶手段11と、前記状況検出手段10が出力した情報を保持するとともに、前記運転支援決定手段13が前記情報を参照することを許可した第二記憶手段12と、を備えている。
【0017】
(第1実施例)
図2は本発明の第1実施例に係る車両用運転支援装置のブロック構成図である。
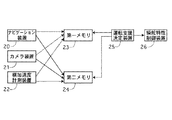
この車両用運転支援装置には、ナビゲーション装置20、カメラ装置21、横加速度計測装置22、第一メモリ23、第二メモリ24、運転支援決定装置25、操舵特性制御装置26が備わっている。ナビゲーション装置20、カメラ装置21、横加速度計測装置22は、図1に示すクレーム対応図において、それぞれの状況検出手段10に対応する。また、第一メモリ23は第一記憶手段11を、第二メモリ24は第二記憶手段12を構成する。運転支援決定装置25は、運転支援決定手段13を構成し、操舵特性制御装置25は制御装置14を構成する。
【0018】
本実施例におけるナビゲーション装置20の構成を図3に示す。本ナビゲーション装置20は、GPS40より送信される情報や、入力回路41を介して入力される車輪の回転速度や慣性センサ類から送られてくる情報を、装置内に保持した地図情報43に参照して統合することによって、自車両の位置を検出する装置である。運転者は目的とする行き先を入力すると、現在の自車両の位置に基づいて、自車両が通行すべき経路を検索して運転者に提示する。本実施例では、ナビゲーション装置20を用いて曲路の位置を検出し、更に、曲率半径算出回路42によって、曲路の曲率半径を算出する状況検出手段10として使用する。
一般的なナビゲーション装置が保持する地図情報には、経路探索や地図描画に用いられる点データ(ノード点)が含まれる。この点データを用いて曲路を検出して、更には検出した曲路の曲率半径を算出する方法に関する技術が開発されているが、この点データは不均等間隔で配置されている場合が多く、よって、点データより曲路の位置と曲率半径を算出する場合には、算出された値に多少の誤差が含まれることは周知である。
そこで、本実施例では、ナビゲーション装置20において記憶装置44を備える。記憶装置44には、ナビゲーション装置20が持つ特性が保持されている。例えば、本記憶装置44は、ナビゲーション装置20に備えられた曲路の位置と曲率半径の算出方法によって算出した値と実際の値を統計的に処理することで求めた誤差の範囲を、曲路位置と曲率半径の算出方法に対する精度として保持する。また、曲路の位置と曲率半径は、地図情報43に登録された位置であれば、任意に算出が可能である。従って、本事実も記憶装置44に、曲路の位置と曲率半径の算出可能な範囲に対する制限として、保持する。
【0019】
本実施例におけるカメラ装置21の構成を図4に示す。カメラ装置21は、車両前方の光景を撮影するテレビカメラ46、テレビカメラ46の画像から車線を抽出する画像処理回路48、から構成されている。本実施例では、カメラ装置21を用いて曲路を検出し、更に、曲路の曲率半径を算出する状況検出手段10として使用する。前記画像処理回路48では、前記ビデオカメラが撮影したアナログ信号又はデジタル信号による車両前方の画像信号から、画像処理技術によって車両前方の道路上に書かれた白線を抽出することが可能である。
前記曲率半径算出回路49は、画像処理回路48によって抽出した車線に基づき、車線が曲路である場合にはその位置と曲率半径を算出する回路である。
画像処理回路48及び曲率半径算出回路49による車線の抽出と曲路及び曲率半径の算出は、カメラの画素数や曲路及び曲率半径の算出方法に応じて、所定の精度で行われるが、夜間走行やトンネル内走行のようにカメラ画像に白線が撮像されない場合や、悪天候時において、車線検出が不能であったり、車線検出の精度、ひいては曲路及び曲率半径算出の精度が落ちたりする傾向がある。
そこで、本実施例では、カメラ装置21において記憶装置50を備える。記憶装置50には、カメラ装置21が持つ特性が保持されている。例えば、本記憶装置50は、カメラ装置21に備えられた曲路及び曲率半径の算出方法によって算出した曲路及び曲率半径と実際の曲路及び曲率半径を統計的に処理することで求めた誤差の範囲を、曲路及び曲率半径の算出方法に対する精度として保持する。
なお、カメラ装置による曲路及び曲率半径の算出精度は、先述のように車両の走行環境の状況に大きく依存する。そこで、車両周囲環境の明るさや天候を検出する装置に対する入力回路47を持ち、それら装置の入力に対して、公知のベイジアンネットに代表される確率的推論手法等を用いて、環境要因を加味した曲路及び曲率半径の精度を算出しても良い。また、通常、カメラ装置21による曲路の検出と曲率半径の算出は、テレビカメラが撮影した車両前方の光景に含まれる曲路に限られる。曲路検出の方法や環境要因にも依るが、曲路及び曲率半径の算出可能な範囲は、高々、0メートルから100メートル程度の範囲に収まる。従って、本事実も記憶装置50に、曲路及び曲率半径の算出可能な範囲に対する制限として、保持する。
【0020】
本実施例における横加速度計測装置22の構成を図5に示す。横加速度計測装置22は、自車両の横加速度を計測する横加速度センサ52から構成されている。本実施例では、横加速度センサ52と入力回路53を介して入力される自車両の速度を用いて曲路及び曲路の曲率半径を算出する状況検出手段10として使用する。一般に、横加速度をG、自車両の速度をvとすると、曲率半径ρ=G/v2となる。本横加速度計測装置29によれば、曲率半径ρは比較的詳細な精度によって算出可能である。本装置に備わった曲率半径算出回路54では、前記の方法によって経路上の曲路において曲率半径を算出する。なお、通常、センサが計測した値には誤差が含まれていることは周知である。
そこで、本実施例では、横加速度計測装置29において記憶装置55を備える。記憶装置56には、横加速度計測装置29が持つ特性が保持されている。例えば、横加速度計測装置29に備えられた曲率半径算出回路54によって算出した曲率半径と、実際の曲率半径を統計的に処理することで求めた誤差の範囲を、曲率半径の算出ロジックに対する精度として保持する。更に、本手法によれば、曲率半径の算出可能な範囲は、曲路に入る直前から曲路を出るまでに限られる。従って、本事実も、記憶装置55に、曲率半径の算出可能な範囲に対する制限として、保持する。
【0021】
運転支援決定装置25は、自車両を操作する運転者の運転を支援する方法を決定する。本実施例では、操舵特性制御装置26を制御することによって運転者の支援を実施する。本実施例における操舵特性制御装置26の構成を図6に示す。一般に、運転者の操舵に対する転舵の特性を変更するものとして、運転者によるハンドル59の回転を操舵機構61に伝達する伝達機構60の伝達特性を伝達特性変更回路58によって変更するものや、ハンドル59の操舵量に対する操舵機構61の転舵量を操舵量特性変更回路57によって変更するもの等が存在する。前者は、伝達特性を変化させる因子として、操舵角速度dθ/dtに比例させることで粘性を出す因子K(粘性因子)を変更することによって実現され、後者は、操舵量に対する転舵量を決定するギア比Gが可変な装置を導入することによって実現される。操舵量特性制御装置26は、操舵量特性変更回路57及び伝達特性変更回路58に対して、操舵の特性を変更する命令を伝達する。
【0022】
本実施例における運転支援決定装置25の構成を図7に示す。運転支援決定装置25は、車両が置かれている現在の状況や、車両が将来置かれる状況に基づいて、時系列的に、運転者の運転を支援する。例えば、運転支援決定装置25は、『曲率半径Rの曲路では、ギア比Gをgとする』、等の支援ルール65を保持している。そして、そのルールは、一つの事象(本実施例では、曲路の出現)に対して、現在から将来までに行う支援を時系列的に細分化されて記述されている。例えば、曲路に対しては、『曲率半径Rの曲路まで1000m(±40m)の時点で、ギア比Gを変更する旨を告知する。』『曲率半径Rの曲路まで20m(±4m)の時点で、曲率半径Rを±1mの精度で決定し、ギア比Gをgに変更する』『曲路走行中は、曲率半径(±0.5m)に応じてギア比gに対する補正を実施する』等のルールにより構成されている。本ルールには、実際に支援を行うために必要な情報の種別(本例では、曲率半径Rと曲路の位置)と、支援を行うために必要な精度(本例では、曲率半径に対する精度と、曲路の位置に対する精度)が記されている。
【0023】
次に、作用を説明する。
ここで、時間Tkにおけるナビゲーション装置20、カメラ装置21、横加速度計測装置22、運転支援決定装置25、の処理は独立的に行われる。各処理の流れをフローチャートと共に、順を追って説明する。
【0024】
[運転支援決定装置の処理]
まず、運転支援決定装置25の処理の流れを図10に示す。
【0025】
ステップS100では、記憶装置66に保持された時刻Tk−1に得た情報に基づき支援を実施する。支援は運転支援決定装置25が操舵特性制御装置26に対するギア比Gの変更命令、又は、粘性因子Kの変更命令を、通信回路67を介して操舵特性制御装置26に出力することによって行われる。支援を実施することによって、状況Sk−1は状況Skになる。
【0026】
ステップS101では、状況Skにおける支援策を立案する。ここでは、処理装置62において、支援ルール65を参照しながら支援策を立案する。選ばれた支援を実施するために必要な情報を抽出する。
【0027】
ステップS102では、ステップS101で抽出した支援に必要な情報を要求情報として、メモリ出力回路63を介して、第一メモリ23に出力する。この要求情報は、例えば、図8に示すように、現在位置から自車両が経路上、将来通行するであろう位置において、運転者を支援するために必要となる情報(本実施例では、曲路の位置と、曲率半径)を、区間に分別して記述したものである。各区間には、必要とする情報の種別と精度が記載されている。
【0028】
ステップS103では、メモリ参照回路64にて、第二メモリ24を、新たな情報が書き加えられるまで、監視する。第二メモリ24に記載される情報は、前記のナビゲーション装置20、カメラ装置21、横加速度計測装置22が出力した情報である。詳細は後述するが、ステップS102で記載した区分毎に、各装置が検出した曲率半径と精度、更に、それら情報に対する各装置の確信度が付随されて示されている。
【0029】
ステップS104では、第二メモリ24に書き加えられた新たな情報のうち、確信度の高い情報を選択して、記憶回路66に取り込む。この際、確信度が同等であった場合には、運転支援決定装置25に備わった信頼度記憶装置68を参照する。この信頼度記憶装置68には図9に示すように、本実施例の運転支援装置に備わった状況検出装置、すなわち、ナビゲーション装置20、カメラ装置21、横加速度計測装置22に対して、ステップS102で説明の区間毎の信頼度Rが保持されており、信頼度Rの値が大きいほど信頼がおける情報源を意味する。従って、確信度が同等であった場合には、信頼度Rを比較し、信頼度Rの高い状況検出装置が提示した情報を記憶回路66に取り込む。
【0030】
ステップS105では、ステップS104で選択された情報を提供した状況検出装置、すなわち、本実施例では、ステップS102で説明した個々の区間に対して、提供した情報が採択されたナビゲーション装置20、カメラ装置21、横加速度計測装置22のいずれかについて、信頼度記憶装置68に保持された信頼度Riを向上させる処理を実施する。本処理は、例えば、情報源となった状況検出装置に対する信頼度Riの値を増す(Ri=Ri+N)ようにすればよい。以上の処理が終了したらステップS100に戻る。
【0031】
[ナビゲーション装置の処理]
次に、ナビゲーション装置20の処理の流れを図11に示す。
【0032】
ステップS110では、第一メモリ23を、新たな情報が書き加えられるまで、監視する。本手続きは、ナビゲーション装置20に備わった通信回路45を介して行う。
【0033】
ステップS111では、第一メモリ23に新たな情報が書き加えられた時、その情報の中で、ナビゲーション装置20が提供可能な情報が存在するか否かを検討する。例えば、図8に示した要求情報が提示された場合、ナビゲーション装置20は、ナビゲーション装置20に備えられた記憶装置44に保持された特性と、第一メモリ23に記載された区分ごとの要求情報の距離、種別、精度を比較して、ナビゲーション装置20で提供可能な情報の区分が存在すると判断されたとき、ステップS112に進む。提供可能な情報の区分が存在しないと判断した場合、ステップS110に戻る。
【0034】
ステップS112では、ナビゲーション装置20は情報の収集を実施する。例えば、第一メモリ23に、要求する情報の種別として『曲路位置』と『曲率半径』、要求する情報の範囲として『10メートルから30メートル先』が提示され、ステップS111にて、この区分に情報を提供すると判断したとき、ナビゲーション装置20は、10メートルから30メートル先の曲路の有無と、曲路が存在する場合には曲率半径を、現在の自車両の位置と地図情報から検索して入手する。この際、求めた曲率半径に対する誤差も算出する。この誤差は、地図そのものの持つ誤差や、GPSが提供する自車両の位置に対する誤差を勘案した値であり、ナビゲーション装置20としての曲率半径を算出する精度情報として利用する。
【0035】
ステップS113では、確信度を算出する。この確信度は、第一メモリ23に提示された情報の要求をどれほど満たしているかを数値的に記述したものである。通常、実際の環境では、建造物の陰等で自車両の位置が正しく検出されなかったがためにナビゲーション装置20として本来持つ機能を発揮できない場合が存在する。また、例えば『±2メートル以内』の精度要求に対して、実際には±3メートルのであれば提供可能というような、要求を完全には満たさない情報を提供せざるをえない場合が存在する。確信度は、このような状況の元で、ナビゲーション装置20が情報を提供していることを数値として明示化するものである。
【0036】
ステップS114では、ナビゲーション装置20が算出した情報、本実施例では、曲路の有無と、曲路が存在する場合にはその位置と曲率半径を、精度を含めて、要求情報の区分ごとに、第2第二メモリ244に記述する。この際、ステップS113で算出した確信度を付随して記述する。本手続きは、ナビゲーション装置20に備わった通信回路45を介して行う。
【0037】
[カメラ装置の処理]
以下、カメラ装置21の処理の流れを説明する。処理の流れは図11に示したナビゲーション装置20の処理の流れと同様である。
【0038】
ステップS110では、第一メモリ23を、新たな情報が書き加えられるまで、監視する。本手続きは、カメラ装置21に備わった通信回路51を介して行う。
【0039】
ステップS111では、第一メモリ23に新たな情報が書き加えられた時、その情報の中で、カメラ装置21が提供可能な情報が存在するか否かを検討する。例えば第8図に示した要求情報が提示された場合、カメラ装置21は、カメラ装置21に備えられた記憶装置50に保持された特性と、第一メモリ23に記載された区分ごとの要求情報の距離、種別、精度を比較して、カメラ装置21で提供可能な情報の区分が存在すると判断されたとき、ステップS112に進む。提供可能な情報の区分が存在しないと判断した場合、ステップS110に戻る。
【0040】
ステップS112では、カメラ装置21は情報の収集を実施する。例えば、第一メモリ23に、要求する情報の種別として『曲路位置』と『曲率半径』、要求する情報の範囲として『3メートルから10メートル先』が提示され、ステップS111にて、この区分に情報を提供すると判断したとき、カメラ装置21は、3メートルから10メートル先の曲路の有無と、曲路が存在する場合には曲率半径を、カメラ画像から計算して入手する。この際、求めた曲率半径に対する誤差も算出する。カメラそのものが持つ特性や、曲率を算出するロジックの誤差を勘案した値であり、カメラ装置21としての曲率半径を算出する精度情報として利用する。
【0041】
ステップS113では、確信度を算出する。この確信度は、第一メモリ23に提示された情報の要求をどれほど満たしているかを数値的に記述したものである。通常、実際の環境では、カメラで検出する白線が薄れており正しく検出できなかったり、夜間等の走行によって撮像するために必要な明るさの不足によって、カメラが正常に機能しなかったりすることで、カメラ装置21として本来持つ機能を発揮できない場合が存在する。また、例えば、『±0.5メートル以内』の精度要求に対して、±1.0メートルのように、要求を満たさない情報を提供せざるをえない場合が存在する。確信度は、このような状況の元で、カメラ装置21が情報を提供していることを数値として明示化するものである。
【0042】
ステップS114では、カメラ装置21が算出した情報、本実施例では曲路の有無と、曲路が存在する場合にはその位置と曲率半径を、精度を含めて、要求情報の区分ごとに、第二メモリ24に記述する。この際、ステップS113で算出した確信度を付随して記述する。本手続きは、カメラ装置21に備わった通信回路51を介して行う。
【0043】
[横加速度計測装置の処理]
以下、横加速度計測装置22の処理を説明する。処理の流れは図11に示したナビゲーション装置20の処理の流れと同様である。
【0044】
ステップS110では、第一メモリ23を、新たな情報が書き加えられるまで、監視する。本手続きは、横加速度計測装置22に備わった通信回路56を介して行う。
【0045】
ステップS111では、第一メモリ23に新たな情報が書き加えられた時、その情報の中で、横加速度計測装置22が提供可能な情報が存在するか否かを検討する。例えば図8に示した要求情報が提示された場合、横加速度計測装置22は、横加速度計測装置22に備えられた記憶装置55に保持された特性と、第一メモリ23に記載された区分ごとの要求情報の距離、種別、精度を比較して、横加速度計測装置22で提供可能な情報の区分が存在すると判断されたとき、ステップS112に進む。提供可能な情報の区分が存在しないと判断した場合、ステップS110に戻る。
ステップS112では、横加速度計測装置22は情報の収集を実施する。例えば、第一メモリ23に、要求する情報の種別として『曲路位置』と『曲率半径』、要求する情報の範囲として『0メートルから3メートル先』が提示され、ステップS111にて、この区分に情報を提供すると判断したとき、横加速度計測装置22は、0メートルから3メートル先の曲路の有無と、曲路が存在する場合には曲率半径を、横加速度及び自車両の速度から計算する。この際、求めた曲率半径に対する誤差も算出する。横加速度計そのものが持つ特性や、曲率を算出するロジックの誤差を勘案した値であり、横加速度計測装置22としての曲率半径を算出する精度情報として利用する。
【0046】
ステップS113では、確信度を算出する。この確信度は、第一メモリ23に提示された情報の要求をどれほど満たしているかを数値的に記述したものである。通常、実際の環境では、道路に傾斜がついていたりすることによって、横加速度計測装置22として本来持つ機能を100%発揮できない場合が存在する。また、例えば、『±0.2メートル以内』の精度要求に対して、±0.5メートルのように、要求を完全には満たさない情報を提供せざるをえない場合が存在する。このような状況を勘案して、確信度として数値化するものである。
【0047】
ステップS114では、横加速度計測装置22が算出した情報、つまり、本実施例では曲路の有無と、曲路が存在する場合にはその位置と曲率半径を、精度を含めて、要求情報の区分ごとに、第二メモリ24に記述する。この際、ステップS113で算出した確信度を付随して記述する。本手続きは、横加速度装置22に備わった通信回路56を介して行う。
【0048】
[運転支援作用]
運転者の安全な車両運転を実現することを目的とする従来の運転支援技術にあっては、以下のような解決すべき課題があった。
【0049】
実際的には、支援決定の処理をオンラインで再構成することを可能とする技術の必要性は残されている。昨今、運転者の嗜好や特性に応じた運転支援を実施する装置が開発されている。
【0050】
例えば、特開平11−353598号公報に記載の移動体検出警報装置では、運転者の技量や周囲環境に応じて警報を発する範囲を変更する技術である。本技術では、状況検出装置としての周囲環境検出手段からの詳細な情報に基づき、警報を発するタイミングの補正を実施している。
このような補正を実施することによって、個々の運転者により適した警報が可能となり、車両運転上の安全性をより高める支援が可能となっている。更には、本来、運転支援とは、警報を発するタイミングの補正のみに留まらず、時間的、空間的に様々な段階にて行われるべきである。詳細な情報に基づく詳細な支援と概略的な情報に基づく概略的な支援が、時間的、空間的な状況に応じて段階的に選択されることで、更に効果的な運転の支援を行うことが可能となる。
そして、特開平11−353598号公報に記載の移動体検出警報装置においても、全体的な運転支援という観点から鑑みると、仮に最終的な警報を頻繁に発する必要がある運転者であったならば、最終的な警報を発する以前に、最終的な警報に至る可能性があることを情報として提示し、運転者の注意を促すことも効果的である。
【0051】
上記特開平11−310146号公報に記載の車両用操舵制御装置や特開2000−62587号公報に記載のプレビューブレーキシステムには、状況を検出する状況検出装置が備わっている。例えば、前者ではGPSや地図情報に基づいて曲路状況を検出し、後者ではレーザレーダで撮像された前方の車両状況を検出している。これら状況検出装置が検出した状況に基づいて運転者の支援は行われる。
このような運転支援装置では、特に支援決定の処理において、状況検出装置の検出する状況や検知の精度が予め想定した範囲にあることを前提として開発されている。
【0052】
すなわち、構成上、状況検出装置を異なった検知特性を持つものに取り替えたり、状況検出装置の検知特性を変更したり、状況検出装置を増やしたりする必要があった場合には、運転支援装置における支援決定の処理を、改めて構築しなおす必要があった。
ところが、この運転支援装置における支援決定の処理をオンラインで再構成することは、車両に備わった他の運転支援装置の処理との矛盾を排除したり、他の状況検出装置の検出特性を考慮したりする必要があり、一般には解決が極めて困難な課題とされている。
【0053】
また、前記特開2001−134889号公報に記載の路面状況推定装置においては、センサの検知する情報を予め与えられた状況に当てはめることで、周囲環境に関する詳細な情報を支援の処理に取り込むことができなくなった。このため、運転者の嗜好や特性に応じて警報を発するタイミングの補正したり、時間的、空間的に様々な段階にて支援を行ったりすることが困難になった。
【0054】
本発明は、上記事実を考慮したものである。すなわち、効果的な運転者の支援を実施するために、運転支援装置に備わった状況検出装置の検出特性が時々刻々と変化したり、状況検出装置の数が増減したりした場合においては、支援決定の処理をオンラインで再構成しなくても継続的に支援を実施することが可能であり、かつ、運転者の嗜好や技量が変化して支援決定の処理をオンラインで再構成したい場合においては、状況検出装置の特性を鑑みることなく再構成することが可能である車両用運転支援装置を提供しようとするものである。
【0055】
従って、本実施例によれば、状況検出手段であるナビゲーション装置20と、カメラ装置21と、横加速度計測装置22によって、それぞれの装置が独立して、曲路の有無の判定と、曲路が存在する場合には曲路の位置と曲路の位置の精度を求めるようにし、また、それぞれの状況検出手段20,21,22の判定に対して確信度を付随して、確信度が高い情報を選択して利用するようにしたので、同一の支援ルールにも関わらず、自車両の走行系路上に存在する曲路に対して、時間的に多段階な支援を、すなわち、長期的な運転者の支援から短期的な運転者の支援までを、確実な情報の元に実施することが可能となった。
【0056】
また、運転支援決定装置25において、状況検出手段20,21,22に対する信頼度を保持する信頼度記憶装置68を備え、複数の状況検出手段20,21,22が提供する情報に対して、それぞれの確信度が同じ場合であった時には、信頼度の高い状況検出手段20または21または22の情報を利用するようにしたので、安定した運転支援を運転者に提供することが可能となった。
【0057】
例えば、車両用運転支援装置の一例である特開平11−310146号公報における車両用操舵制御装置は、自車両の走行経路上に曲路があった場合、その曲路の度合いに応じて、操舵量に対する転舵量の伝達比を変更するものである。従来、この類の装置では、車両の速度や加速度によって伝達比を変更する制御を実施していたため、曲路の大小に関わらず一律的なない操舵特性によって支援が実施され、ハンドルの操作量が大きく異なっていた。
【0058】
しかし、本実施例においては、曲路を例えばナビゲーション装置20から取得して、曲路の大小によって伝達比を変えるものとした。このような装置が開発されることによって、曲路の大小に関わらず、一定の操舵行動を実施することによって曲路の走行が可能となった。
【0059】
次に、効果を説明する。
第1実施例の車両用運転支援装置にあっては、下記に列挙する効果を得ることができる。
【0060】
(1) 車両の走行時における状況を検出する状況検出手段10と、運転者の支援方法を決定する運転支援決定手段13と、前記運転支援決定手段13の決定した支援方法に基づき、車両の制御を行う制御手段14と、を備えた車両用運転支援装置において、前記運転支援決定手段13が出力した情報を保持するとともに、前記状況検出手段10が前記情報を参照することを許可した第一記憶手段11と、前記状況検出手段10が出力した情報を保持するとともに、前記運転支援決定手段13が前記情報を参照することを許可した第二記憶手段12とを備えたため、互いに独立して動作する前記状況検出手段10と前記運転支援決定手段13が、前記第一記憶手段11、及び、前記第二記憶手段12を介して協調的に動作し、状況検出手段10の検出特性が時々刻々と変化したり、状況検出手段10の数が増減したりした場合においては、支援決定の処理をオンラインで再構成しなくても継続的に支援を実施することが可能であり、かつ、運転者の嗜好や技量が変化して支援決定の処理をオンラインで再構成したい場合においては、状況検出手段10の特性を鑑みることなく再構成することが可能であることで、効果的な運転者の支援を実施することができる。
【0061】
(2) 前記運転支援決定手段13の決定する支援方法は、時間的に多段階なものであり、更に、前記状況検出手段10が検出可能な状況の種別と、検出可能な状況の範囲と、検出可能な状況の精度、に関わらず、多段階な運転者の支援方法の決定に必要な情報の種別と、前記必要な情報の範囲と、前記必要な情報の精度を段階ごとに算出することとしたため、前記状況検出手段10の性能に依存することなく、前記運転支援決定手段13にとって時間的に多段階的な運転者の支援方法の決定が可能となる。
【0062】
(3) 前記第一記憶手段11に対して前記運転支援決定手段13が出力して保持された情報は、前記運転支援決定手段13が算出した多段階的な、運転者を支援するために必要な情報の種別を示した必要種別と、前記必要な情報の範囲を示した必要範囲と、前記必要な情報の精度を示した必要精度と、であり、前記第一記憶手段は、多段階的な前記必要種別と、前記必要範囲と、前記必要精度と、を、必要情報として保持することとしたため、前記運転支援決定手段13は、状況に応じて、必要な範囲の情報を必要な精度で、要求することが可能となる。
【0063】
(4) 前記状況検出手段10は、検出可能な状況の種別を示した検出種別と、検出可能な状況の範囲を示した検出範囲と、検出可能な状況の精度を示した検出精度とを検出情報として保持する保持手段と、前記第一記憶手段11に保持された前記必要情報を参照する参照手段と、前記第一記憶手段11が保持する必要情報に対して、前記保持手段が保持する前記検出情報が満たす度合いを確信度として算出する確信度算出手段と、を備えたため、前記第一記憶手段11に保持された前記運転支援決定手段13の要求に対して、種別、範囲、精度の面で、応じた情報を取得することが可能であり、更に、前記運転支援決定手段13の要求を満たした度合いを確信度として算出することが可能となる。
【0064】
(5) 前記状況検出手段10が検出可能な状況を示す前記検出種別は、車両の走行経路における道路線形と、障害物位置と、自車両位置と、路面状況と、天候と、明るさと、運転者の緊張度と、運転者の負荷状況と、の全て、もしくは、いずれかであることとしたため、車両の走行経路における道路線形と、障害物位置と、自車両位置と、路面状況と、天候と、明るさと、運転者の緊張度と、運転者の負荷状況に応じた、運転者の運転支援が可能となる。
【0065】
(6) 前記状況検出手段10を、前記状況検出手段10の検出種別毎に少なくとも2つ以上を備えることとしたため、複数の状況検出手段10による状況検出結果に基づいた運転者の運転支援が可能となる。
【0066】
(7) 前記第二記憶手段12に対して前記状況検出手段10が出力して保持された情報は、前記状況検出手段10の前記確信度算出手段(確信度算出ステップS113)が算出した確信度と、前記状況検出手段10の前記保持手段が保持する前記検出情報と、であり、前記第二記憶手段12において、前記確信度と、前記検出情報とを、状況検出手段10毎の支援情報として保持することとしたため、複数の状況検出手段10が検出した検出情報と、その検出情報に対する確信度を、第二記憶手段12を参照するだけで取得することが可能となる。
【0067】
(8) 前記運転支援決定手段13は、前記第二記憶手段12に保持された前記支援情報を参照する参照手段(メモリ参照回路64)を備え、前記参照手段によって前記第二記憶手段12を参照した時、前記状況検出手段10毎の前記支援情報において、前記検出範囲が重複している場合には、前記支援情報における前記確信度が大きい前記支援情報を選択する支援情報選択手段と、を備えたため、前記運転支援決定手段13は複数の前記状況検出手段10が検出した支援情報のなかから、より確実な支援情報に基づいて運転者の支援が可能となる。
【0068】
(9) 前記運転支援決定手段13は、個々の状況検出手段10に対応した信頼度を保持する信頼度保持手段(信頼度記憶装置68)を備え、前記支援情報選択手段において複数の支援情報から特定の支援情報が選択された場合には、前記特定の支援情報を前記第二記憶手段12に出力した前記状況検出手段10に対応する信頼度を増加させるため、前記運転支援決定手段13が実際に支援に用いた事のある支援情報を提供した状況検出手段10を、内部に記憶しておくことが可能となる。
【0069】
(10) 前記支援情報選択手段における前記支援情報の選択は、前記検出範囲が重複しており、かつ、前記確信度が同等の場合には、前記信頼度保持手段に保持された前記信頼度が高い前記状況検出手段10が前記第二記憶手段12に出力した前記支援情報を選択するため、前記支援情報選択手段において、過去に利用した支援情報に基づく運転者の支援が可能となる。このため、より安定した支援を実施することが可能となる。
【0070】
(第2実施例)
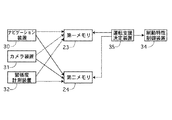
図12は、本発明の第2実施例に係る車両用運転支援装置のブロック構成図である。この図において、基本構成は図2として示した第1実施例のブロック構成図と同一であり、同符号を付して重複した説明は省略する。この車両用運転支援装置には、ナビゲーション装置30、カメラ装置31、緊張度計測装置32、第一メモリ23、第二メモリ24、運転支援決定装置33、制動特性制御装置34が備わっている。
【0071】
ナビゲーション装置30、カメラ装置31、緊張度計測装置32は、図1に示すクレーム対応図において、それぞれの状況検出手段10に対応する。運転支援決定装置33は、運転支援決定手段13を構成し、制動特性制御装置34は制御装置14を構成する。
【0072】
本実施例におけるナビゲーション装置30の構成を図13に示す。この図において、基本構成は前記図3に示した第1実施例のナビゲーション装置20の構成図と同一であり、同符号を付して重複した説明は省略する。
本ナビゲーション装置30は、GPS40より送信される情報や、入力回路41を介して入力される車輪の回転速度や慣性センサ類から送られてくる情報を、装置内に保持した地図情報43に参照して統合することによって、自車両の位置を検出する装置である。運転者は目的とする行き先を入力すると、現在の自車両の位置に基づいて、自車両が通行すべき経路を検索して運転者に提示する。本実施例では、ナビゲーション装置30を用いて障害物までの距離を検出する状況検出手段10として使用する。
一般的なナビゲーション装置が保持する地図情報には、道路のキロポスト情報が含まれる。インフラから障害物の有無情報が送信された時、このキロポスト情報を用いて、障害物が存在する地図上の位置に、その旨を運転者に分からしめるアイコン等の目印を重ねて表示したりしているが、このインフラからの障害物の有無情報と、ナビゲーション装置が運転者に提示する障害物の有無情報には、キロポスト情報の精度の制限やインフラからの障害物に位置情報の精度の制限から、かならずしも一致しないことは周知である。
そこで、本実施例では、ナビゲーション装置30において記憶装置44を備える。記憶装置44には、ナビゲーション装置30が持つ特性が保持されている。例えば、本記憶装置44は、ナビゲーション装置30によって検出した障害物までの距離と、その障害物までの距離において、実際に回避操作が行われたか否かを統計的に処理することで求めた誤差の範囲を、本装置による障害物までの距離に対する精度として保持する。
また、本ナビゲーション装置による障害物までの距離の検出は、インフラが出力した情報が入手可能な位置に自車両が存在する障害物に対してのみ行われる。従って、本事実も記憶装置44に、障害物の検出可能な範囲に対する制限として、保持する。
【0073】
本実施例におけるカメラ装置31の構成を図14に示す。カメラ装置31は、車両前方の光景を撮影するテレビカメラ46、テレビカメラ46の画像から車線を抽出する画像処理回路48、から構成されている。本実施例では、カメラ装置31を用いて障害物までの距離を検出する状況検出手段10として使用する。
障害物検出回路70では、前記ビデオカメラが撮影したアナログ信号又はデジタル信号による車両前方の画像信号から、画像処理技術によって車両前方の道路上に配置された障害物までの距離を検出することが可能である。本手法による障害物の距離の検出は、カメラの画素数や障害物の検出ロジックに応じて、所定の精度で行われるが、夜間走行やトンネル内走行のようにカメラ画像に障害物が撮像されない場合や、悪天候時において、障害物検出が不能であったり、また、障害物検出の精度が落ちたりする傾向がある。
そこで、本実施例では、カメラ装置31において記憶装置50を備える。記憶装置50には、カメラ装置21が持つ特性が保持されている。例えば、本記憶装置50は、カメラ装置21に備えられた障害物までの距離の検出方法によって検出した障害物までの距離と、その障害物までの距離において、実際に回避が行われたか否かを統計的に処理することで求めた誤差の範囲を、障害物の検出方法に対する精度として保持する。なお、カメラ装置による障害物までの距離の検出精度は、先述のように車両の走行環境の状況に大きく依存する。
そこで、車両周囲環境の明るさや天候を検出する装置に対する入力回路47を持ち、それら装置の入力に対して、公知のベイジアンネットに代表される確率的推論手法等を用いて、環境要因を加味した障害物までの距離検出の精度を算出しても良い。また、通常、カメラ装置21に障害物までの距離の検出は、テレビカメラが撮影した車両前方の光景に含まれる障害物に対してのみ行われる。障害物検出の方法や環境要因にも依るが、障害物までの距離の検出可能な範囲は、高々、0メートルから100メートル程度の範囲に収まる。従って、本事実も記憶装置50に、障害物までの距離の検出可能な範囲に対する制限として、保持する。
【0074】
本実施例における緊張度検出装置32の構成を図15に示す。緊張度計測装置32では、運転者の緊張度を測定する。運転者の緊張度の測定には、例えば、表面温度測定装置71を用いる。人間は緊張状態を強いられた場合、皮膚温の低下が観察される。そこで、本実施例では、表面温度測定装置71によって運転者の顔面の皮膚温を計測して、運転者の皮膚温の低下から障害物までの距離の検出の存在を推測することで、緊張度計測装置32を障害物までの距離を検出する状況検出手段10として利用する。しかし、本手法による障害物までの距離の検出は、運転者に緊張を強いる要因に対する運転者個々人の特性に大きく依存する。
そこで、本実施例では、緊張度計測装置32において記憶装置73を備える。本記憶装置は、緊張度計測装置32よって検出した運転者の緊張度に基づく障害物までの距離と、その障害物までの距離において、実際に回避が行われたか否かを統計的に処理することで求めた誤差の範囲を、本緊張度計測装置32による障害物までの距離を検出する方法に対する精度として保持する。
また、緊張度計測装置32による障害物までの距離の検出は、運転者が視認した車両周囲の光景に存在する障害物に対するものに限られる。障害物までの距離の検出方法や環境要因にも依るが、障害物までの距離を検出可能な範囲は、高々、0メートルから100メートル程度の範囲に収まる。従って、本事実も記憶装置73に、緊張度計測装置32による障害物検知の制限として、保持する。
【0075】
運転支援決定装置33は、自車両を操作する運転者の運転を支援する方法を決定する。本実施例では、制動特性制御装置34を制御することによって運転者の支援を実施する。一般に、運転者の制動操作に対する制動の特性を変更するものとして、運転者によるブレーキペダルのストローク量Sに対する制動力を変更可能とする技術が存在する。例えば、ブレーキペダルのストストロークSの速さΔSにおいて、ΔS>ΔS1が成立するとき、通常時に比べて大きな制動力を発するブレーキアシスト装置を導入することによって実現される。
【0076】
本実施例における運転支援決定装置33の構成を図16に示す。運転支援決定装置33は、車両が置かれている現在の状況や、車両が将来置かれる状況に基づいて、時系列的に、運転者の運転を支援する。例えば、運転支援決定装置33は、『障害物の手前では、ブレーキのアシスト力を増す』、等の支援ルール75を保持している。そして、そのルールは、一つの事象(本実施例では、障害物の出現)に対して、現在から将来までに行う支援を時系列的に細分化されて記述されている。例えば、『障害物まで500m(±40m)の時点で、障害物が存在する旨を告知する。』『障害物まで20m(±4m)の時点で、ブレーキのアシスト力の準備を実施する』『障害物回避の制動中は、距離(±0.5m)に応じて、ブレーキのアシスト力の補正を実施する』等のルールにより構成されている。
本ルールには、実際に支援を行うために必要な情報の種別(本例では、障害物までの距離)と、支援を行うために必要な精度(本例では、障害物までの距離の精度)が記されている。
【0077】
次に作用を説明する。
【0078】
ここで、時間Tkにおけるナビゲーション装置30、カメラ装置31、緊張度計測装置32、運転支援決定装置35、の処理は独立的に行われる。各処理の流れをフローチャートと共に、順を追って説明する。
【0079】
[運転支援決定装置の処理]
まず、運転支援決定装置35の処理の流れを図19に示す。この図において、基本的な処理の流れは図9に示す第1実施例の処理の流れと同一であり、同符号を付して重複した説明は省略する。
【0080】
ステップS200では、処理装置62において、ステップS101で立案した支援策が、緊急時の支援か否かを判断する。緊急時の支援とは、本車両用運転支援装置で検出する障害物が目前に位置しており、運転者もしくは本車両用運転支援装置にて、障害物を回避するために、急制動が必要な状況における支援を言う。緊急時の支援が不要な場合はステップS102に進み、緊急時の支援が必要な場合はステップS202に進む。
【0081】
ステップS202では、信頼度記憶装置68を参照する。信頼度記憶装置68には、例えば、図18に示されるように、情報を区間に分類し、各区間における各状況検出手段(本実施例では、ナビゲーション装置30、カメラ装置31、緊張度計測装置32)毎の信頼度が記載されている。
【0082】
ステップS203では、通信回路67を介して、緊急時の支援を実施するために必要な情報が含まれる区間における信頼度が最も高い状況検出手段に対して、情報提供の依頼を実施する。この際、精度要求は実施しない。この処理は、ステップS101で必要とする情報の取得を、信頼度の高い状況検出装置に依頼することを意味する。
【0083】
ステップS204では、ステップS203で依頼した情報を、信頼度の高い状況検出装置から、通信回路67を介して、直接的に取得する。処理はステップS100に戻り、本情報に基づいて運転者に対する支援が実施される。
【0084】
[ナビゲーション装置の処理]
次に、ナビゲーション装置30の処理の流れを、図20を用いて説明する。
【0085】
ステップS210では、運転支援決定装置33からの緊急な情報取得の依頼が来ているか否かを確認する。緊急の情報取得依頼が来ていた場合にはステップS211に進み、緊急の情報取得以来が来ていない場合にはステップS110に進む。
【0086】
ステップS110では、第一メモリ23を、新たな情報が書き加えられるまで、監視する。本手続きは、ナビゲーション装置30に備わった通信回路45を介して行う。
【0087】
ステップS111では、第一メモリ23に新たな情報が書き加えられた時、その情報の中で、ナビゲーション装置30が提供可能な情報が存在するか否かを検討する。例えば、図17に示した要求情報が提示された場合、ナビゲーション装置30は、ナビゲーション装置30に備えられた記憶装置44に保持された特性と、第一メモリ23に記載された区分ごとの要求情報の距離、種別、精度を比較して、ナビゲーション装置30で提供可能な情報の区分が存在すると判断されたとき、ステップS112に進む。提供可能な情報の区分が存在しないと判断した場合、ステップS110に戻る。
【0088】
ステップS112では、ナビゲーション装置30は情報の収集を実施する。例えば、第一メモリ23に、要求する情報の種別として『障害物の距離』、要求する情報の範囲として『10メートルから30メートル先』が提示され、ステップS111にて、この区分に情報を提供すると判断したとき、ナビゲーション装置30は、10メートルから30メートル先の障害物の有無と、障害物が存在する場合にはその距離を、現在の自車両の位置と地図情報及びインフラ情報から検索して取得する。この際、求めた障害物の距離に対する誤差も算出する。この誤差は、地図そのものの持つ誤差や、インフラ情報の精度、GPSが提供する自車両の位置に対する誤差を勘案した値であり、ナビゲーション装置30としての障害物までの距離を検出する精度情報として利用する。
【0089】
ステップS113では、確信度を算出する。この確信度は、第一メモリ23に提示された情報の要求をどれほど満たしているかを数値的に記述したものである。通常、実際の環境では、建造物の陰等で自車両の位置が正しく検出されなかったがためにナビゲーション装置30として本来持つ機能を発揮できない場合が存在する。また、例えば『±2メートル以内』の精度要求に対して、実際には±3メートルのであれば提供可能というような、要求を完全には満たさない情報を提供せざるをえない場合が存在する。確信度は、このような状況の元で、ナビゲーション装置30が情報を提供していることを数値として明示化するものである。
【0090】
ステップS114では、ナビゲーション装置30が算出した情報、本実施例では、障害物の位置を、精度を含めて、要求情報の区分ごとに、第二メモリ24に記述する。この際、ステップS113で算出した確信度を付随して記述する。本手続きは、ナビゲーション装置30に備わった通信回路45を介して行う。処理はステップS210に戻る。
【0091】
ステップS211では、緊急の情報収集を行う。運転支援決定装置33からは、例えば、要求する情報の種別として『障害物の距離』、要求する情報の範囲として『10メートルから30メートル先』が、直接的に提示される。ナビゲーション装置30は、10メートルから30メートル先の障害物の有無と、障害物が存在する場合にはその距離を、現在の自車両の位置と地図情報及びインフラ情報から検索して取得する。続いて、ステップS212で、取得した情報を、通信回路45を介して、運転支援決定装置33に直接的に出力する。
【0092】
[カメラ装置の処理]
以下、カメラ装置31の処理の流れを説明する。処理の流れは第20図に示したナビゲーション装置30の処理の流れと同様である。
【0093】
ステップS210では、運転支援決定装置33からの緊急な情報取得の依頼が来ているか否かを確認する。緊急の情報取得依頼が来ていた場合にはステップS211に進み、緊急の情報取得以来が来ていない場合にはステップS110に進む。
【0094】
ステップS110では、第一メモリ23を、新たな情報が書き加えられるまで、監視する。本手続きは、カメラ装置31に備わった通信回路51を介して行う。
【0095】
ステップS111では、第一メモリ23に新たな情報が書き加えられた時、その情報の中で、カメラ装置31が提供可能な情報が存在するか否かを検討する。例えば、7図17に示した要求情報が提示された場合、カメラ装置31は、カメラ装置31に備えられた記憶装置50に保持された特性と、第一メモリ23に記載された区分ごとの要求情報の距離、種別、精度を比較して、カメラ装置31で提供可能な情報の区分が存在すると判断されたとき、ステップS112に進む。提供可能な情報の区分が存在しないと判断した場合、ステップS110に戻る。
【0096】
ステップS112では、カメラ装置31は情報の収集を実施する。例えば、第一メモリ23に、要求する情報の種別として『障害物の距離』、要求する情報の範囲として『3メートルから10メートル先』が提示され、ステップS111にて、この区分に情報を提供すると判断したとき、カメラ装置31は、3メートルから10メートル先の障害物の有無と、障害物が存在する場合には障害物までの距離を、カメラ画像から計算して取得する。この際、求めた障害物までの距離に対する誤差も算出する。カメラそのものが持つ特性や、障害物を抽出する方法の誤差を勘案した値であり、カメラ装置31としての障害物までの距離を算出する精度情報として利用する。
【0097】
ステップS113では、確信度を算出する。この確信度は、第一メモリ23に提示された情報の要求をどれほど満たしているかを数値的に記述したものである。通常、実際の環境では、カメラで検出する障害物が正しく検出できなかったり、夜間等の走行によって撮像するために必要な明るさの不足によって、カメラが正常に機能しなかったりすることで、カメラ装置31として本来持つ機能を発揮できない場合が存在する。また、例えば、『±0.5メートル以内』の精度要求に対して、±1.0メートルのように、要求を満たさない情報を提供せざるをえない場合が存在する。確信度は、このような状況の元で、カメラ装置31が情報を提供していることを数値として明示化するものである。
【0098】
ステップS114では、カメラ装置31が算出した情報、本実施例では曲路の有無と、曲路が存在する場合にはその位置と曲率半径を、精度を含めて、要求情報の区分ごとに、第二メモリ24に記述する。この際、ステップS113で算出した確信度を付随して記述する。本手続きは、カメラ装置31に備わった通信回路51を介して行う。
【0099】
ステップS211では、緊急の情報収集を行う。運転支援決定装置33からは、例えば、要求する情報の種別として『障害物の距離』、要求する情報の範囲として『3 メートルから10メートル先』が、直接的に提示される。カメラ装置31は、3メートルから10メートル先の障害物の有無と、障害物が存在する場合にはその距離を、カメラ画像から計算して取得する。続いて、ステップS212で、取得した情報を、通信回路51を介して、運転支援決定装置33に直接的に出力する。
【0100】
[緊張度計測装置の処理]
以下、緊張度計測装置32の処理を説明する。処理の流れは図20に示したナビゲーション装置30の処理の流れと同様である。
【0101】
ステップS210では、運転支援決定装置33からの緊急な情報取得の依頼が来ているか否かを確認する。緊急の情報取得依頼が来ていた場合にはステップS211に進み、緊急の情報取得依頼が来ていない場合にはステップS110に進む。
【0102】
ステップS110では、第一メモリ23を、新たな情報が書き加えられるまで、監視する。本手続きは、緊張度計測装置32に備わった通信回路74を介して行う。
【0103】
ステップS111では、第一メモリ23に新たな情報が書き加えられた時、その情報の中で、緊張度計測装置32が提供可能な情報が存在するか否かを検討する。例えば図17に示した要求情報が提示された場合、緊張度計測装置32は、緊張度計測装置32に備えられた記憶装置73に保持された特性と、第一メモリ23に記載された区分ごとの要求情報の距離、種別、精度を比較して、緊張度計測装置32で提供可能な情報の区分が存在すると判断されたとき、ステップS112に進む。提供可能な情報の区分が存在しないと判断した場合、ステップS110に戻る。
【0104】
ステップS112では、緊張度計測装置32は情報の収集を実施する。例えば、第一メモリ23に、要求する情報の種別として『障害物の距離』、要求する情報の範囲として『0メートルから3メートル先』が提示され、ステップS111にて、この区分に情報を提供すると判断したとき、緊張度計測装置32は、0メートルから3メートル先の障害物の有無と、障害物が存在する場合には障害物までの距離を、運転者の緊張度から計算して取得する。この際、求めた障害物までの距離に対する誤差も算出する。緊張度の測定装置そのものが持つ特性や、障害物までの距離を抽出する方法の誤差を勘案した値であり、緊張度計測装置32としての障害物までの距離を算出する精度情報として利用する。
【0105】
ステップS113では、確信度を算出する。この確信度は、第一メモリ23に提示された情報の要求をどれほど満たしているかを数値的に記述したものである。通常、実際の環境では、表面温度測定装置71で検出する運転者の顔面画像が正しく撮像できなかったり、他の熱源の影響によって正常に機能しなかったりすることで、緊張度計測装置32として本来持つ機能を発揮できない場合が存在する。また、例えば、『±0.5メートル以内』の精度要求に対して、±1.0メートルのように、要求を満たさない情報を提供せざるをえない場合が存在する。確信度は、このような状況の元で、緊張度計測装置32が情報を提供していることを数値として明示化するものである。
【0106】
ステップS114では、緊張度計測装置32が算出した情報、本実施例では障害物の有無と、障害物が存在する場合には障害物までの距離を、精度を含めて、要求情報の区分ごとに、第二メモリ24に記述する。この際、ステップS113で算出した確信度を付随して記述する。本手続きは、緊張度計測装置32に備わった通信回路74を介して行う。
【0107】
ステップS211では、緊急の情報収集を行う。運転支援決定装置33からは、例えば、要求する情報の種別として『障害物の距離』、要求する情報の範囲として『0メートルから3メートル先』が、直接的に提示される。緊張度計測装置32は、0メートルから3メートル先の障害物の有無と、障害物が存在する場合にはその距離を、運転者の緊張度から計算して取得する。続いて、ステップS212で、取得した情報を、通信回路51を介して、運転支援決定装置33に直接的に出力する。
【0108】
[運転支援作用]
特開2000−62587号公報におけるプレビューブレーキシステムは、緊急時において、運転者のブレーキ踏力に対する制動力を、アシスト力を付加することで、自動的に増加させる装置である。従来、この類の装置では、緊急時であるという判断には、アクセルリリースからブレーキ操作までの一連の動作の特性に基づくものであり、具体的にはアクセルリリースの速度が所定値以上あった場合に、アシスト力を付加するものであった。
【0109】
しかし、本実施例においては、前方車両までの距離を測定することで、支援の要・不要をより確実に判断することが可能となり、また、前方車両までの距離に応じて必要なアシスト力を算出することで、より確実な危険回避を実現するアシスト力の付加が可能となった。
【0110】
次に、効果を説明する。
以上説明したように、第2実施例の車両用運転支援装置によれば、第1実施例に示した発明の効果に加え、下記の効果を得ることができる。
【0111】
(11) 前記運転支援決定手段13は、車両の状況が緊急事態か否かを判断する緊急事態判断手段を備え、緊急事態判断手段によって緊急事態と判断された場合には、前記信頼度保持手段を参照して、前記信頼度が高い前記状況検出手段に前記支援情報の出力を依頼するため、緊急時においては確実な情報に基づく運転者の支援を、素早く実施することが可能となる。
【0112】
(第3実施例)
図21は、本発明の第3実施例に係る車両用運転支援装置のブロック構成図である。この図において、基本構成は図12として示した第2実施例のブロック構成図と同一であり、同符号を付して重複した説明は省略する。この車両用運転支援装置には、ナビゲーション装置30、カメラ装置31、緊張度計測装置32、第一メモリ23、第二メモリ24、運転支援決定装置35、制動特性制御装置34が備わっている。
【0113】
運転支援決定装置35は、図1に示すクレーム対応図において、運転支援決定手段13を構成する。運転支援決定装置35は、自車両を操作する運転者の運転を支援する方法を決定する。本実施例では、制動特性制御装置34を制御することによって運転者の支援を実施する。一般に、運転者の制動操作に対する制動の特性を変更するものとして、運転者によるブレーキペダルのストローク量Sに対する制動力を変更可能とする技術が存在する。例えば、ブレーキペダルのストストロークSの速さΔSにおいて、ΔS>ΔS1が成立するとき、通常時に比べて大きな制動力を発するブレーキアシスト装置を導入することによって実現される。
【0114】
本実施例における運転支援決定装置35の構成を図22に示す。運転支援決定装置35は、車両が置かれている現在の状況や、車両が将来置かれる状況に基づいて、時系列的に、運転者の運転を支援する。例えば、運転支援決定装置35は、『障害物の手前では、ブレーキのアシスト力を増す』、等の支援ルール75を保持している。そして、そのルールは、一つの事象(本実施例では、障害物の出現)に対して、現在から将来までに行う支援を時系列的に細分化されて記述されている。例えば、1次支援として『障害物まで500m(±40m)の時点で、障害物が存在する旨を注意情報として告知する。』、2次支援として『障害物まで10m(±2m)の時点で、ブレーキのアシスト力の準備を実施し、警報を発する』、3次支援として『障害物回避の制動中は、距離(±0.5m)に応じて、ブレーキのアシスト力の付加を実施する』等のルールにより構成されている。本ルールには、実際に支援を行うために必要な情報の種別(本例では、障害物までの距離)と、支援を行うために必要な精度(本例では、障害物までの距離の精度)が記されている。
【0115】
次に、作用を説明する。
【0116】
[運転支援決定装置の処理]
運転支援決定装置35の処理の流れを図23に示す。この図において、基本的な処理の流れは図9に示す第1実施例の処理の流れと同一であり、同符号を付して重複した説明は省略する。
【0117】
ステップS300では、処理装置62にて、ステップS100 で実施した支援が、適切であったか否かを判断する。本判断は、例えば、事前に注意情報や警報を発したにも関わらず、最終的に障害物回避のためのブレーキアシスト力を付加する結果となったり、緊張度計測装置32によって計測された緊張度が高くなったりするなど、適切な支援が行われていれば観察されない事例が観察された場合において、支援が適切ではなかったと判断する。支援が適切であった場合はステップS101に進み、支援が不適切であった場合はステップS301に進む。
【0118】
ステップS301では、支援ルール修正装置76によって、支援ルール75を修正する。本支援ルールの修正は、例えば、本支援ルールが、1次支援として『障害物まで500m(±40m)の時点で、障害物が存在する旨を注意情報として告知する。』、2次支援として『障害物まで10m(±2m)の時点で、ブレーキのアシスト力の準備を実施し、警報を発する』、3次支援として『障害物回避の制動中は、距離(±0.5m )に応じて、ブレーキのアシスト力の付加を実施する』、という支援を行うルールで構成されていた場合で、最終的に障害物回避のためのブレーキアシスト力を付加する結果となってしまった場合、『障害物まで200m(±20m)の時点で、障害物が存在する旨を注意情報として再び告知する。』というルールを加えることで、運転者により安全な運転を行しめることが可能となる。通常、このような支援ルールの修正は、支援ルールを修正するためのルール、すなわち、メタルールを保持しておけば可能となる。例えば、『1次支援と2次支援を実施したにも関わらず、3次支援を実施する結果となった場合には、1次支援と2次支援の間に支援を加える』等のルールをメタルールとして保持しておけばよい。本実施例においては、支援ルール修正装置76が、このメタルールを保持している。支援ルールの修正が終了したら、ステップS101に進む。
【0119】
次に、効果を説明する。
以上説明したように、第3実施例の車両用運転支援装置によれば、第2実施例に示した発明の効果に加え、下記の効果を得ることができる。
【0120】
(12) 前記運転支援決定手段13は、支援方法を修正する支援方法修正手段を備え、時間列で段階を踏んで行われた支援において最終段階の支援が実施された場合には、前記支援方法修正手段は、前記運転支援決定手段の支援方法を修正することとしたので、個々の運転者に適した支援を実施することが可能となる。
すなわち、この支援ルールの修正は、従来、状況検出装置が既知であることが必要であったため、オンラインで実施することは困難であった。しかし、運転支援決定手段13において、支援に必要な情報の種別と範囲と精度によって支援ルールを記述することとした、言い換えると、支援ルールを修正するためのメタルールを保持し、支援ルールが適切ではなかった場合には支援ルール自身を修正するようにしたので、容易に支援ルールの修正を行うことができ、より効果的な運転者の支援が可能となった。
【0121】
以上、本発明の車両用運転支援装置を第1実施例〜第3実施例に基づき説明してきたが、具体的な構成については、これらの実施例に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
【0122】
例えば、第1〜第3実施例では、車両用運転支援装置が適用される制御装置として操舵角と転舵角の比である舵角比制御装置及びブレーキアシスト制御装置の例を示したが、操舵力アシスト制御装置や4輪操舵制御装置や車両挙動制御装置(=VDC制御装置)やABS制御装置や前後輪または左右輪の差動制限制御装置やサスペンション特性制御装置等、安全な運転を実現するための様々な車載制御システムに適用することができる。
【図面の簡単な説明】
【図1】本発明の車両用運転支援装置の構成を示すブロック図である。
【図2】第1実施例の車両用運転支援装置の構成を示すブロック図である。
【図3】第1実施例装置のナビゲーション装置の説明図である。
【図4】第1実施例装置のカメラ装置の説明図である。
【図5】第1実施例装置の横加速度計測装置の説明図である。
【図6】第1実施例装置の操舵特性制御装置の説明図である。
【図7】第1実施例装置の運転支援決定装置の説明図である。
【図8】第1実施例装置の運転支援決定装置が第一メモリ23に記述する情報を説明する図である。
【図9】第1実施例装置の運転支援決定装置が信頼度記憶装置に保持する情報を説明する図である。
【図10】第1実施例装置の運転支援決定装置における演算処理手順を示すフローチャートである。
【図11】第1実施例装置のナビゲーション装置、カメラ装置、横加速度計測装置における演算処理手順を示すフローチャートである。
【図12】第2実施例の車両用運転支援装置の構成を示すブロック図である。
【図13】第2実施例装置のナビゲーション装置の説明図である。
【図14】第2実施例装置のカメラ装置の説明図である。
【図15】第2実施例装置の緊張度計測装置の説明図である。
【図16】第2実施例装置の運転支援決定装置の説明図である。
【図17】第2実施例装置の運転支援決定装置が第一メモリ23に記述する情報を説明する図である。
【図18】第2実施例装置の運転支援決定装置が信頼度記憶装置に保持する情報を説明する図である。
【図19】第2実施例装置の運転支援決定装置における演算処理手順を示すフローチャートである。
【図20】第2実施例装置のナビゲーション装置、カメラ装置、緊張度計測装置における演算処理手順を示すフローチャートである。
【図21】第3実施例の車両用運転支援装置の構成を示すブロック図である。
【図22】第3実施例装置の運転支援決定装置の説明図である。
【図23】第3実施例装置の運転支援決定装置における演算処理手順を示すフローチャートである。
【符号の説明】
10 状況検出手段
11 第一記憶手段
12 第二記憶手段
13 運転支援決定手段
14 制御手段
【発明の属する技術分野】
本発明は、運転者の安全な車両運転を実現することを目的とする車両用運転支援装置の技術分野に属する。
【0002】
【従来の技術】
運転者の安全な車両運転を実現することを目的として、様々な車両用運転支援装置が発明されている。
【0003】
例えば、車両用操舵制御装置において、自車両の走行経路上に曲路があった場合、その曲路の度合いに応じて、操舵量に対する転舵量の伝達比を変更する技術が知られている(例えば、特許文献1参照)。
【0004】
また、プレビューブレーキシステムにおいて、緊急時において、運転者のブレーキ踏力に対する制動力を、アシスト力を付加することで、自動的に増加させる技術が知られている(例えば、特許文献2参照)。
【0005】
さらに、路面状況推定装置として、状況検出装置としてのセンサの検知する情報を予め与えられた状況に当てはめる技術が知られている(例えば、特許文献3参照)。
【0006】
【特許文献1】
特開平11−310146号公報
【特許文献2】
特開2000−62587号公報
【特許文献3】
特開2001−134889号公報。
【0007】
【発明が解決しようとする課題】
しかしながら、従来の車両用運転支援装置にあっては、以下のような問題点があった。
【0008】
特開平11−310146号公報に記載の車両用操舵制御装置や特開2000−62587号公報に記載のプレビューブレーキシステムには、状況を検出する状況検出装置が備わっている。例えば、前者ではGPSや地図情報に基づいて曲路状況を検出し、後者ではレーザレーダで撮像された前方の車両状況を検出している。これら状況検出装置が検出した状況に基づいて運転者の支援は行われる。
【0009】
このような運転支援装置では、特に支援決定の処理において、状況検出装置の検出する状況や検知の精度が予め想定した範囲にあることを前提として開発されている。
【0010】
従って、状況検出装置の検知特性を変更したり、状況検出装置を増やしたりする必要があった場合には、運転支援装置における支援決定の処理を、改めて構築しなおす必要があった。
【0011】
この運転支援装置における支援決定の処理をオンラインで再構成することは、車両に備わった他の運転支援装置の処理との矛盾を排除したり、他の状況検出装置の検出特性を考慮したりする必要があり、一般には解決が極めて困難な課題とされている。
【0012】
また、特開2001−134889号公報に記載の路面状況推定装置においては、センサの検知する情報を予め与えられた状況に当てはめることで、周囲環境に関する詳細な情報を支援の処理に取り込むことができなくなった。このため、運転者の嗜好や特性に応じて警報を発するタイミングの補正したり、時間的、空間的に様々な段階にて支援を行ったりすることが困難になった。
【0013】
本発明は、上記課題に着目してなされたもので、支援決定処理のオンラインでの再構成を容易にすることで、効果的な運転者の支援を実施することができる車両用運転支援装置を提供することを目的とする。
【0014】
【課題を解決するための手段】
上記目的を達成するため、本発明では、
状況検出手段と、運転支援決定手段と、車両の制御を行う制御手段と、を有する車両用運転支援装置において、
前記運転支援決定手段が出力した情報を保持するとともに、前記状況検出手段が前記情報を参照することを許可した第一記憶手段と、
前記状況検出手段が出力した情報を保持するとともに、前記運転支援決定手段が前記情報を参照することを許可した第二記憶手段と、
を備えた手段とした。
【0015】
【発明の効果】
よって、本発明の車両用運転支援装置にあっては、互いに独立して動作する状況検出手段と運転支援決定手段が、第一記憶手段、及び、第二記憶手段を介して協調的に動作し、状況検出手段の検出特性が時々刻々と変化したり、状況検出手段の数が増減したりした場合においては、支援決定の処理をオンラインで再構成しなくても継続的に支援を実施することが可能であり、かつ、運転者の嗜好や技量が変化して支援決定の処理をオンラインで再構成したい場合においては、状況検出手段の特性を鑑みることなく再構成することが可能であることで、効果的な運転者の支援を実施することができる。
【0016】
【発明の実施の形態】
以下、本発明の車両用運転支援装置を実現する実施の形態を、図面に示す第1実施例〜第3実施例に基づいて説明する。
図1は本発明の車両用運転支援装置を示すクレーム対応図である。車両の走行時における状況を検出する状況検出手段10と、運転者の支援方法を決定する運転支援決定手段13と、前記運転支援決定手段13の決定した支援方法に基づき、車両の制御を行う制御手段14と、を有する車両用運転支援装置において、前記運転支援決定手段13が出力した情報を保持するとともに、前記状況検出手段10が前記情報を参照することを許可した第一記憶手段11と、前記状況検出手段10が出力した情報を保持するとともに、前記運転支援決定手段13が前記情報を参照することを許可した第二記憶手段12と、を備えている。
【0017】
(第1実施例)
図2は本発明の第1実施例に係る車両用運転支援装置のブロック構成図である。
この車両用運転支援装置には、ナビゲーション装置20、カメラ装置21、横加速度計測装置22、第一メモリ23、第二メモリ24、運転支援決定装置25、操舵特性制御装置26が備わっている。ナビゲーション装置20、カメラ装置21、横加速度計測装置22は、図1に示すクレーム対応図において、それぞれの状況検出手段10に対応する。また、第一メモリ23は第一記憶手段11を、第二メモリ24は第二記憶手段12を構成する。運転支援決定装置25は、運転支援決定手段13を構成し、操舵特性制御装置25は制御装置14を構成する。
【0018】
本実施例におけるナビゲーション装置20の構成を図3に示す。本ナビゲーション装置20は、GPS40より送信される情報や、入力回路41を介して入力される車輪の回転速度や慣性センサ類から送られてくる情報を、装置内に保持した地図情報43に参照して統合することによって、自車両の位置を検出する装置である。運転者は目的とする行き先を入力すると、現在の自車両の位置に基づいて、自車両が通行すべき経路を検索して運転者に提示する。本実施例では、ナビゲーション装置20を用いて曲路の位置を検出し、更に、曲率半径算出回路42によって、曲路の曲率半径を算出する状況検出手段10として使用する。
一般的なナビゲーション装置が保持する地図情報には、経路探索や地図描画に用いられる点データ(ノード点)が含まれる。この点データを用いて曲路を検出して、更には検出した曲路の曲率半径を算出する方法に関する技術が開発されているが、この点データは不均等間隔で配置されている場合が多く、よって、点データより曲路の位置と曲率半径を算出する場合には、算出された値に多少の誤差が含まれることは周知である。
そこで、本実施例では、ナビゲーション装置20において記憶装置44を備える。記憶装置44には、ナビゲーション装置20が持つ特性が保持されている。例えば、本記憶装置44は、ナビゲーション装置20に備えられた曲路の位置と曲率半径の算出方法によって算出した値と実際の値を統計的に処理することで求めた誤差の範囲を、曲路位置と曲率半径の算出方法に対する精度として保持する。また、曲路の位置と曲率半径は、地図情報43に登録された位置であれば、任意に算出が可能である。従って、本事実も記憶装置44に、曲路の位置と曲率半径の算出可能な範囲に対する制限として、保持する。
【0019】
本実施例におけるカメラ装置21の構成を図4に示す。カメラ装置21は、車両前方の光景を撮影するテレビカメラ46、テレビカメラ46の画像から車線を抽出する画像処理回路48、から構成されている。本実施例では、カメラ装置21を用いて曲路を検出し、更に、曲路の曲率半径を算出する状況検出手段10として使用する。前記画像処理回路48では、前記ビデオカメラが撮影したアナログ信号又はデジタル信号による車両前方の画像信号から、画像処理技術によって車両前方の道路上に書かれた白線を抽出することが可能である。
前記曲率半径算出回路49は、画像処理回路48によって抽出した車線に基づき、車線が曲路である場合にはその位置と曲率半径を算出する回路である。
画像処理回路48及び曲率半径算出回路49による車線の抽出と曲路及び曲率半径の算出は、カメラの画素数や曲路及び曲率半径の算出方法に応じて、所定の精度で行われるが、夜間走行やトンネル内走行のようにカメラ画像に白線が撮像されない場合や、悪天候時において、車線検出が不能であったり、車線検出の精度、ひいては曲路及び曲率半径算出の精度が落ちたりする傾向がある。
そこで、本実施例では、カメラ装置21において記憶装置50を備える。記憶装置50には、カメラ装置21が持つ特性が保持されている。例えば、本記憶装置50は、カメラ装置21に備えられた曲路及び曲率半径の算出方法によって算出した曲路及び曲率半径と実際の曲路及び曲率半径を統計的に処理することで求めた誤差の範囲を、曲路及び曲率半径の算出方法に対する精度として保持する。
なお、カメラ装置による曲路及び曲率半径の算出精度は、先述のように車両の走行環境の状況に大きく依存する。そこで、車両周囲環境の明るさや天候を検出する装置に対する入力回路47を持ち、それら装置の入力に対して、公知のベイジアンネットに代表される確率的推論手法等を用いて、環境要因を加味した曲路及び曲率半径の精度を算出しても良い。また、通常、カメラ装置21による曲路の検出と曲率半径の算出は、テレビカメラが撮影した車両前方の光景に含まれる曲路に限られる。曲路検出の方法や環境要因にも依るが、曲路及び曲率半径の算出可能な範囲は、高々、0メートルから100メートル程度の範囲に収まる。従って、本事実も記憶装置50に、曲路及び曲率半径の算出可能な範囲に対する制限として、保持する。
【0020】
本実施例における横加速度計測装置22の構成を図5に示す。横加速度計測装置22は、自車両の横加速度を計測する横加速度センサ52から構成されている。本実施例では、横加速度センサ52と入力回路53を介して入力される自車両の速度を用いて曲路及び曲路の曲率半径を算出する状況検出手段10として使用する。一般に、横加速度をG、自車両の速度をvとすると、曲率半径ρ=G/v2となる。本横加速度計測装置29によれば、曲率半径ρは比較的詳細な精度によって算出可能である。本装置に備わった曲率半径算出回路54では、前記の方法によって経路上の曲路において曲率半径を算出する。なお、通常、センサが計測した値には誤差が含まれていることは周知である。
そこで、本実施例では、横加速度計測装置29において記憶装置55を備える。記憶装置56には、横加速度計測装置29が持つ特性が保持されている。例えば、横加速度計測装置29に備えられた曲率半径算出回路54によって算出した曲率半径と、実際の曲率半径を統計的に処理することで求めた誤差の範囲を、曲率半径の算出ロジックに対する精度として保持する。更に、本手法によれば、曲率半径の算出可能な範囲は、曲路に入る直前から曲路を出るまでに限られる。従って、本事実も、記憶装置55に、曲率半径の算出可能な範囲に対する制限として、保持する。
【0021】
運転支援決定装置25は、自車両を操作する運転者の運転を支援する方法を決定する。本実施例では、操舵特性制御装置26を制御することによって運転者の支援を実施する。本実施例における操舵特性制御装置26の構成を図6に示す。一般に、運転者の操舵に対する転舵の特性を変更するものとして、運転者によるハンドル59の回転を操舵機構61に伝達する伝達機構60の伝達特性を伝達特性変更回路58によって変更するものや、ハンドル59の操舵量に対する操舵機構61の転舵量を操舵量特性変更回路57によって変更するもの等が存在する。前者は、伝達特性を変化させる因子として、操舵角速度dθ/dtに比例させることで粘性を出す因子K(粘性因子)を変更することによって実現され、後者は、操舵量に対する転舵量を決定するギア比Gが可変な装置を導入することによって実現される。操舵量特性制御装置26は、操舵量特性変更回路57及び伝達特性変更回路58に対して、操舵の特性を変更する命令を伝達する。
【0022】
本実施例における運転支援決定装置25の構成を図7に示す。運転支援決定装置25は、車両が置かれている現在の状況や、車両が将来置かれる状況に基づいて、時系列的に、運転者の運転を支援する。例えば、運転支援決定装置25は、『曲率半径Rの曲路では、ギア比Gをgとする』、等の支援ルール65を保持している。そして、そのルールは、一つの事象(本実施例では、曲路の出現)に対して、現在から将来までに行う支援を時系列的に細分化されて記述されている。例えば、曲路に対しては、『曲率半径Rの曲路まで1000m(±40m)の時点で、ギア比Gを変更する旨を告知する。』『曲率半径Rの曲路まで20m(±4m)の時点で、曲率半径Rを±1mの精度で決定し、ギア比Gをgに変更する』『曲路走行中は、曲率半径(±0.5m)に応じてギア比gに対する補正を実施する』等のルールにより構成されている。本ルールには、実際に支援を行うために必要な情報の種別(本例では、曲率半径Rと曲路の位置)と、支援を行うために必要な精度(本例では、曲率半径に対する精度と、曲路の位置に対する精度)が記されている。
【0023】
次に、作用を説明する。
ここで、時間Tkにおけるナビゲーション装置20、カメラ装置21、横加速度計測装置22、運転支援決定装置25、の処理は独立的に行われる。各処理の流れをフローチャートと共に、順を追って説明する。
【0024】
[運転支援決定装置の処理]
まず、運転支援決定装置25の処理の流れを図10に示す。
【0025】
ステップS100では、記憶装置66に保持された時刻Tk−1に得た情報に基づき支援を実施する。支援は運転支援決定装置25が操舵特性制御装置26に対するギア比Gの変更命令、又は、粘性因子Kの変更命令を、通信回路67を介して操舵特性制御装置26に出力することによって行われる。支援を実施することによって、状況Sk−1は状況Skになる。
【0026】
ステップS101では、状況Skにおける支援策を立案する。ここでは、処理装置62において、支援ルール65を参照しながら支援策を立案する。選ばれた支援を実施するために必要な情報を抽出する。
【0027】
ステップS102では、ステップS101で抽出した支援に必要な情報を要求情報として、メモリ出力回路63を介して、第一メモリ23に出力する。この要求情報は、例えば、図8に示すように、現在位置から自車両が経路上、将来通行するであろう位置において、運転者を支援するために必要となる情報(本実施例では、曲路の位置と、曲率半径)を、区間に分別して記述したものである。各区間には、必要とする情報の種別と精度が記載されている。
【0028】
ステップS103では、メモリ参照回路64にて、第二メモリ24を、新たな情報が書き加えられるまで、監視する。第二メモリ24に記載される情報は、前記のナビゲーション装置20、カメラ装置21、横加速度計測装置22が出力した情報である。詳細は後述するが、ステップS102で記載した区分毎に、各装置が検出した曲率半径と精度、更に、それら情報に対する各装置の確信度が付随されて示されている。
【0029】
ステップS104では、第二メモリ24に書き加えられた新たな情報のうち、確信度の高い情報を選択して、記憶回路66に取り込む。この際、確信度が同等であった場合には、運転支援決定装置25に備わった信頼度記憶装置68を参照する。この信頼度記憶装置68には図9に示すように、本実施例の運転支援装置に備わった状況検出装置、すなわち、ナビゲーション装置20、カメラ装置21、横加速度計測装置22に対して、ステップS102で説明の区間毎の信頼度Rが保持されており、信頼度Rの値が大きいほど信頼がおける情報源を意味する。従って、確信度が同等であった場合には、信頼度Rを比較し、信頼度Rの高い状況検出装置が提示した情報を記憶回路66に取り込む。
【0030】
ステップS105では、ステップS104で選択された情報を提供した状況検出装置、すなわち、本実施例では、ステップS102で説明した個々の区間に対して、提供した情報が採択されたナビゲーション装置20、カメラ装置21、横加速度計測装置22のいずれかについて、信頼度記憶装置68に保持された信頼度Riを向上させる処理を実施する。本処理は、例えば、情報源となった状況検出装置に対する信頼度Riの値を増す(Ri=Ri+N)ようにすればよい。以上の処理が終了したらステップS100に戻る。
【0031】
[ナビゲーション装置の処理]
次に、ナビゲーション装置20の処理の流れを図11に示す。
【0032】
ステップS110では、第一メモリ23を、新たな情報が書き加えられるまで、監視する。本手続きは、ナビゲーション装置20に備わった通信回路45を介して行う。
【0033】
ステップS111では、第一メモリ23に新たな情報が書き加えられた時、その情報の中で、ナビゲーション装置20が提供可能な情報が存在するか否かを検討する。例えば、図8に示した要求情報が提示された場合、ナビゲーション装置20は、ナビゲーション装置20に備えられた記憶装置44に保持された特性と、第一メモリ23に記載された区分ごとの要求情報の距離、種別、精度を比較して、ナビゲーション装置20で提供可能な情報の区分が存在すると判断されたとき、ステップS112に進む。提供可能な情報の区分が存在しないと判断した場合、ステップS110に戻る。
【0034】
ステップS112では、ナビゲーション装置20は情報の収集を実施する。例えば、第一メモリ23に、要求する情報の種別として『曲路位置』と『曲率半径』、要求する情報の範囲として『10メートルから30メートル先』が提示され、ステップS111にて、この区分に情報を提供すると判断したとき、ナビゲーション装置20は、10メートルから30メートル先の曲路の有無と、曲路が存在する場合には曲率半径を、現在の自車両の位置と地図情報から検索して入手する。この際、求めた曲率半径に対する誤差も算出する。この誤差は、地図そのものの持つ誤差や、GPSが提供する自車両の位置に対する誤差を勘案した値であり、ナビゲーション装置20としての曲率半径を算出する精度情報として利用する。
【0035】
ステップS113では、確信度を算出する。この確信度は、第一メモリ23に提示された情報の要求をどれほど満たしているかを数値的に記述したものである。通常、実際の環境では、建造物の陰等で自車両の位置が正しく検出されなかったがためにナビゲーション装置20として本来持つ機能を発揮できない場合が存在する。また、例えば『±2メートル以内』の精度要求に対して、実際には±3メートルのであれば提供可能というような、要求を完全には満たさない情報を提供せざるをえない場合が存在する。確信度は、このような状況の元で、ナビゲーション装置20が情報を提供していることを数値として明示化するものである。
【0036】
ステップS114では、ナビゲーション装置20が算出した情報、本実施例では、曲路の有無と、曲路が存在する場合にはその位置と曲率半径を、精度を含めて、要求情報の区分ごとに、第2第二メモリ244に記述する。この際、ステップS113で算出した確信度を付随して記述する。本手続きは、ナビゲーション装置20に備わった通信回路45を介して行う。
【0037】
[カメラ装置の処理]
以下、カメラ装置21の処理の流れを説明する。処理の流れは図11に示したナビゲーション装置20の処理の流れと同様である。
【0038】
ステップS110では、第一メモリ23を、新たな情報が書き加えられるまで、監視する。本手続きは、カメラ装置21に備わった通信回路51を介して行う。
【0039】
ステップS111では、第一メモリ23に新たな情報が書き加えられた時、その情報の中で、カメラ装置21が提供可能な情報が存在するか否かを検討する。例えば第8図に示した要求情報が提示された場合、カメラ装置21は、カメラ装置21に備えられた記憶装置50に保持された特性と、第一メモリ23に記載された区分ごとの要求情報の距離、種別、精度を比較して、カメラ装置21で提供可能な情報の区分が存在すると判断されたとき、ステップS112に進む。提供可能な情報の区分が存在しないと判断した場合、ステップS110に戻る。
【0040】
ステップS112では、カメラ装置21は情報の収集を実施する。例えば、第一メモリ23に、要求する情報の種別として『曲路位置』と『曲率半径』、要求する情報の範囲として『3メートルから10メートル先』が提示され、ステップS111にて、この区分に情報を提供すると判断したとき、カメラ装置21は、3メートルから10メートル先の曲路の有無と、曲路が存在する場合には曲率半径を、カメラ画像から計算して入手する。この際、求めた曲率半径に対する誤差も算出する。カメラそのものが持つ特性や、曲率を算出するロジックの誤差を勘案した値であり、カメラ装置21としての曲率半径を算出する精度情報として利用する。
【0041】
ステップS113では、確信度を算出する。この確信度は、第一メモリ23に提示された情報の要求をどれほど満たしているかを数値的に記述したものである。通常、実際の環境では、カメラで検出する白線が薄れており正しく検出できなかったり、夜間等の走行によって撮像するために必要な明るさの不足によって、カメラが正常に機能しなかったりすることで、カメラ装置21として本来持つ機能を発揮できない場合が存在する。また、例えば、『±0.5メートル以内』の精度要求に対して、±1.0メートルのように、要求を満たさない情報を提供せざるをえない場合が存在する。確信度は、このような状況の元で、カメラ装置21が情報を提供していることを数値として明示化するものである。
【0042】
ステップS114では、カメラ装置21が算出した情報、本実施例では曲路の有無と、曲路が存在する場合にはその位置と曲率半径を、精度を含めて、要求情報の区分ごとに、第二メモリ24に記述する。この際、ステップS113で算出した確信度を付随して記述する。本手続きは、カメラ装置21に備わった通信回路51を介して行う。
【0043】
[横加速度計測装置の処理]
以下、横加速度計測装置22の処理を説明する。処理の流れは図11に示したナビゲーション装置20の処理の流れと同様である。
【0044】
ステップS110では、第一メモリ23を、新たな情報が書き加えられるまで、監視する。本手続きは、横加速度計測装置22に備わった通信回路56を介して行う。
【0045】
ステップS111では、第一メモリ23に新たな情報が書き加えられた時、その情報の中で、横加速度計測装置22が提供可能な情報が存在するか否かを検討する。例えば図8に示した要求情報が提示された場合、横加速度計測装置22は、横加速度計測装置22に備えられた記憶装置55に保持された特性と、第一メモリ23に記載された区分ごとの要求情報の距離、種別、精度を比較して、横加速度計測装置22で提供可能な情報の区分が存在すると判断されたとき、ステップS112に進む。提供可能な情報の区分が存在しないと判断した場合、ステップS110に戻る。
ステップS112では、横加速度計測装置22は情報の収集を実施する。例えば、第一メモリ23に、要求する情報の種別として『曲路位置』と『曲率半径』、要求する情報の範囲として『0メートルから3メートル先』が提示され、ステップS111にて、この区分に情報を提供すると判断したとき、横加速度計測装置22は、0メートルから3メートル先の曲路の有無と、曲路が存在する場合には曲率半径を、横加速度及び自車両の速度から計算する。この際、求めた曲率半径に対する誤差も算出する。横加速度計そのものが持つ特性や、曲率を算出するロジックの誤差を勘案した値であり、横加速度計測装置22としての曲率半径を算出する精度情報として利用する。
【0046】
ステップS113では、確信度を算出する。この確信度は、第一メモリ23に提示された情報の要求をどれほど満たしているかを数値的に記述したものである。通常、実際の環境では、道路に傾斜がついていたりすることによって、横加速度計測装置22として本来持つ機能を100%発揮できない場合が存在する。また、例えば、『±0.2メートル以内』の精度要求に対して、±0.5メートルのように、要求を完全には満たさない情報を提供せざるをえない場合が存在する。このような状況を勘案して、確信度として数値化するものである。
【0047】
ステップS114では、横加速度計測装置22が算出した情報、つまり、本実施例では曲路の有無と、曲路が存在する場合にはその位置と曲率半径を、精度を含めて、要求情報の区分ごとに、第二メモリ24に記述する。この際、ステップS113で算出した確信度を付随して記述する。本手続きは、横加速度装置22に備わった通信回路56を介して行う。
【0048】
[運転支援作用]
運転者の安全な車両運転を実現することを目的とする従来の運転支援技術にあっては、以下のような解決すべき課題があった。
【0049】
実際的には、支援決定の処理をオンラインで再構成することを可能とする技術の必要性は残されている。昨今、運転者の嗜好や特性に応じた運転支援を実施する装置が開発されている。
【0050】
例えば、特開平11−353598号公報に記載の移動体検出警報装置では、運転者の技量や周囲環境に応じて警報を発する範囲を変更する技術である。本技術では、状況検出装置としての周囲環境検出手段からの詳細な情報に基づき、警報を発するタイミングの補正を実施している。
このような補正を実施することによって、個々の運転者により適した警報が可能となり、車両運転上の安全性をより高める支援が可能となっている。更には、本来、運転支援とは、警報を発するタイミングの補正のみに留まらず、時間的、空間的に様々な段階にて行われるべきである。詳細な情報に基づく詳細な支援と概略的な情報に基づく概略的な支援が、時間的、空間的な状況に応じて段階的に選択されることで、更に効果的な運転の支援を行うことが可能となる。
そして、特開平11−353598号公報に記載の移動体検出警報装置においても、全体的な運転支援という観点から鑑みると、仮に最終的な警報を頻繁に発する必要がある運転者であったならば、最終的な警報を発する以前に、最終的な警報に至る可能性があることを情報として提示し、運転者の注意を促すことも効果的である。
【0051】
上記特開平11−310146号公報に記載の車両用操舵制御装置や特開2000−62587号公報に記載のプレビューブレーキシステムには、状況を検出する状況検出装置が備わっている。例えば、前者ではGPSや地図情報に基づいて曲路状況を検出し、後者ではレーザレーダで撮像された前方の車両状況を検出している。これら状況検出装置が検出した状況に基づいて運転者の支援は行われる。
このような運転支援装置では、特に支援決定の処理において、状況検出装置の検出する状況や検知の精度が予め想定した範囲にあることを前提として開発されている。
【0052】
すなわち、構成上、状況検出装置を異なった検知特性を持つものに取り替えたり、状況検出装置の検知特性を変更したり、状況検出装置を増やしたりする必要があった場合には、運転支援装置における支援決定の処理を、改めて構築しなおす必要があった。
ところが、この運転支援装置における支援決定の処理をオンラインで再構成することは、車両に備わった他の運転支援装置の処理との矛盾を排除したり、他の状況検出装置の検出特性を考慮したりする必要があり、一般には解決が極めて困難な課題とされている。
【0053】
また、前記特開2001−134889号公報に記載の路面状況推定装置においては、センサの検知する情報を予め与えられた状況に当てはめることで、周囲環境に関する詳細な情報を支援の処理に取り込むことができなくなった。このため、運転者の嗜好や特性に応じて警報を発するタイミングの補正したり、時間的、空間的に様々な段階にて支援を行ったりすることが困難になった。
【0054】
本発明は、上記事実を考慮したものである。すなわち、効果的な運転者の支援を実施するために、運転支援装置に備わった状況検出装置の検出特性が時々刻々と変化したり、状況検出装置の数が増減したりした場合においては、支援決定の処理をオンラインで再構成しなくても継続的に支援を実施することが可能であり、かつ、運転者の嗜好や技量が変化して支援決定の処理をオンラインで再構成したい場合においては、状況検出装置の特性を鑑みることなく再構成することが可能である車両用運転支援装置を提供しようとするものである。
【0055】
従って、本実施例によれば、状況検出手段であるナビゲーション装置20と、カメラ装置21と、横加速度計測装置22によって、それぞれの装置が独立して、曲路の有無の判定と、曲路が存在する場合には曲路の位置と曲路の位置の精度を求めるようにし、また、それぞれの状況検出手段20,21,22の判定に対して確信度を付随して、確信度が高い情報を選択して利用するようにしたので、同一の支援ルールにも関わらず、自車両の走行系路上に存在する曲路に対して、時間的に多段階な支援を、すなわち、長期的な運転者の支援から短期的な運転者の支援までを、確実な情報の元に実施することが可能となった。
【0056】
また、運転支援決定装置25において、状況検出手段20,21,22に対する信頼度を保持する信頼度記憶装置68を備え、複数の状況検出手段20,21,22が提供する情報に対して、それぞれの確信度が同じ場合であった時には、信頼度の高い状況検出手段20または21または22の情報を利用するようにしたので、安定した運転支援を運転者に提供することが可能となった。
【0057】
例えば、車両用運転支援装置の一例である特開平11−310146号公報における車両用操舵制御装置は、自車両の走行経路上に曲路があった場合、その曲路の度合いに応じて、操舵量に対する転舵量の伝達比を変更するものである。従来、この類の装置では、車両の速度や加速度によって伝達比を変更する制御を実施していたため、曲路の大小に関わらず一律的なない操舵特性によって支援が実施され、ハンドルの操作量が大きく異なっていた。
【0058】
しかし、本実施例においては、曲路を例えばナビゲーション装置20から取得して、曲路の大小によって伝達比を変えるものとした。このような装置が開発されることによって、曲路の大小に関わらず、一定の操舵行動を実施することによって曲路の走行が可能となった。
【0059】
次に、効果を説明する。
第1実施例の車両用運転支援装置にあっては、下記に列挙する効果を得ることができる。
【0060】
(1) 車両の走行時における状況を検出する状況検出手段10と、運転者の支援方法を決定する運転支援決定手段13と、前記運転支援決定手段13の決定した支援方法に基づき、車両の制御を行う制御手段14と、を備えた車両用運転支援装置において、前記運転支援決定手段13が出力した情報を保持するとともに、前記状況検出手段10が前記情報を参照することを許可した第一記憶手段11と、前記状況検出手段10が出力した情報を保持するとともに、前記運転支援決定手段13が前記情報を参照することを許可した第二記憶手段12とを備えたため、互いに独立して動作する前記状況検出手段10と前記運転支援決定手段13が、前記第一記憶手段11、及び、前記第二記憶手段12を介して協調的に動作し、状況検出手段10の検出特性が時々刻々と変化したり、状況検出手段10の数が増減したりした場合においては、支援決定の処理をオンラインで再構成しなくても継続的に支援を実施することが可能であり、かつ、運転者の嗜好や技量が変化して支援決定の処理をオンラインで再構成したい場合においては、状況検出手段10の特性を鑑みることなく再構成することが可能であることで、効果的な運転者の支援を実施することができる。
【0061】
(2) 前記運転支援決定手段13の決定する支援方法は、時間的に多段階なものであり、更に、前記状況検出手段10が検出可能な状況の種別と、検出可能な状況の範囲と、検出可能な状況の精度、に関わらず、多段階な運転者の支援方法の決定に必要な情報の種別と、前記必要な情報の範囲と、前記必要な情報の精度を段階ごとに算出することとしたため、前記状況検出手段10の性能に依存することなく、前記運転支援決定手段13にとって時間的に多段階的な運転者の支援方法の決定が可能となる。
【0062】
(3) 前記第一記憶手段11に対して前記運転支援決定手段13が出力して保持された情報は、前記運転支援決定手段13が算出した多段階的な、運転者を支援するために必要な情報の種別を示した必要種別と、前記必要な情報の範囲を示した必要範囲と、前記必要な情報の精度を示した必要精度と、であり、前記第一記憶手段は、多段階的な前記必要種別と、前記必要範囲と、前記必要精度と、を、必要情報として保持することとしたため、前記運転支援決定手段13は、状況に応じて、必要な範囲の情報を必要な精度で、要求することが可能となる。
【0063】
(4) 前記状況検出手段10は、検出可能な状況の種別を示した検出種別と、検出可能な状況の範囲を示した検出範囲と、検出可能な状況の精度を示した検出精度とを検出情報として保持する保持手段と、前記第一記憶手段11に保持された前記必要情報を参照する参照手段と、前記第一記憶手段11が保持する必要情報に対して、前記保持手段が保持する前記検出情報が満たす度合いを確信度として算出する確信度算出手段と、を備えたため、前記第一記憶手段11に保持された前記運転支援決定手段13の要求に対して、種別、範囲、精度の面で、応じた情報を取得することが可能であり、更に、前記運転支援決定手段13の要求を満たした度合いを確信度として算出することが可能となる。
【0064】
(5) 前記状況検出手段10が検出可能な状況を示す前記検出種別は、車両の走行経路における道路線形と、障害物位置と、自車両位置と、路面状況と、天候と、明るさと、運転者の緊張度と、運転者の負荷状況と、の全て、もしくは、いずれかであることとしたため、車両の走行経路における道路線形と、障害物位置と、自車両位置と、路面状況と、天候と、明るさと、運転者の緊張度と、運転者の負荷状況に応じた、運転者の運転支援が可能となる。
【0065】
(6) 前記状況検出手段10を、前記状況検出手段10の検出種別毎に少なくとも2つ以上を備えることとしたため、複数の状況検出手段10による状況検出結果に基づいた運転者の運転支援が可能となる。
【0066】
(7) 前記第二記憶手段12に対して前記状況検出手段10が出力して保持された情報は、前記状況検出手段10の前記確信度算出手段(確信度算出ステップS113)が算出した確信度と、前記状況検出手段10の前記保持手段が保持する前記検出情報と、であり、前記第二記憶手段12において、前記確信度と、前記検出情報とを、状況検出手段10毎の支援情報として保持することとしたため、複数の状況検出手段10が検出した検出情報と、その検出情報に対する確信度を、第二記憶手段12を参照するだけで取得することが可能となる。
【0067】
(8) 前記運転支援決定手段13は、前記第二記憶手段12に保持された前記支援情報を参照する参照手段(メモリ参照回路64)を備え、前記参照手段によって前記第二記憶手段12を参照した時、前記状況検出手段10毎の前記支援情報において、前記検出範囲が重複している場合には、前記支援情報における前記確信度が大きい前記支援情報を選択する支援情報選択手段と、を備えたため、前記運転支援決定手段13は複数の前記状況検出手段10が検出した支援情報のなかから、より確実な支援情報に基づいて運転者の支援が可能となる。
【0068】
(9) 前記運転支援決定手段13は、個々の状況検出手段10に対応した信頼度を保持する信頼度保持手段(信頼度記憶装置68)を備え、前記支援情報選択手段において複数の支援情報から特定の支援情報が選択された場合には、前記特定の支援情報を前記第二記憶手段12に出力した前記状況検出手段10に対応する信頼度を増加させるため、前記運転支援決定手段13が実際に支援に用いた事のある支援情報を提供した状況検出手段10を、内部に記憶しておくことが可能となる。
【0069】
(10) 前記支援情報選択手段における前記支援情報の選択は、前記検出範囲が重複しており、かつ、前記確信度が同等の場合には、前記信頼度保持手段に保持された前記信頼度が高い前記状況検出手段10が前記第二記憶手段12に出力した前記支援情報を選択するため、前記支援情報選択手段において、過去に利用した支援情報に基づく運転者の支援が可能となる。このため、より安定した支援を実施することが可能となる。
【0070】
(第2実施例)
図12は、本発明の第2実施例に係る車両用運転支援装置のブロック構成図である。この図において、基本構成は図2として示した第1実施例のブロック構成図と同一であり、同符号を付して重複した説明は省略する。この車両用運転支援装置には、ナビゲーション装置30、カメラ装置31、緊張度計測装置32、第一メモリ23、第二メモリ24、運転支援決定装置33、制動特性制御装置34が備わっている。
【0071】
ナビゲーション装置30、カメラ装置31、緊張度計測装置32は、図1に示すクレーム対応図において、それぞれの状況検出手段10に対応する。運転支援決定装置33は、運転支援決定手段13を構成し、制動特性制御装置34は制御装置14を構成する。
【0072】
本実施例におけるナビゲーション装置30の構成を図13に示す。この図において、基本構成は前記図3に示した第1実施例のナビゲーション装置20の構成図と同一であり、同符号を付して重複した説明は省略する。
本ナビゲーション装置30は、GPS40より送信される情報や、入力回路41を介して入力される車輪の回転速度や慣性センサ類から送られてくる情報を、装置内に保持した地図情報43に参照して統合することによって、自車両の位置を検出する装置である。運転者は目的とする行き先を入力すると、現在の自車両の位置に基づいて、自車両が通行すべき経路を検索して運転者に提示する。本実施例では、ナビゲーション装置30を用いて障害物までの距離を検出する状況検出手段10として使用する。
一般的なナビゲーション装置が保持する地図情報には、道路のキロポスト情報が含まれる。インフラから障害物の有無情報が送信された時、このキロポスト情報を用いて、障害物が存在する地図上の位置に、その旨を運転者に分からしめるアイコン等の目印を重ねて表示したりしているが、このインフラからの障害物の有無情報と、ナビゲーション装置が運転者に提示する障害物の有無情報には、キロポスト情報の精度の制限やインフラからの障害物に位置情報の精度の制限から、かならずしも一致しないことは周知である。
そこで、本実施例では、ナビゲーション装置30において記憶装置44を備える。記憶装置44には、ナビゲーション装置30が持つ特性が保持されている。例えば、本記憶装置44は、ナビゲーション装置30によって検出した障害物までの距離と、その障害物までの距離において、実際に回避操作が行われたか否かを統計的に処理することで求めた誤差の範囲を、本装置による障害物までの距離に対する精度として保持する。
また、本ナビゲーション装置による障害物までの距離の検出は、インフラが出力した情報が入手可能な位置に自車両が存在する障害物に対してのみ行われる。従って、本事実も記憶装置44に、障害物の検出可能な範囲に対する制限として、保持する。
【0073】
本実施例におけるカメラ装置31の構成を図14に示す。カメラ装置31は、車両前方の光景を撮影するテレビカメラ46、テレビカメラ46の画像から車線を抽出する画像処理回路48、から構成されている。本実施例では、カメラ装置31を用いて障害物までの距離を検出する状況検出手段10として使用する。
障害物検出回路70では、前記ビデオカメラが撮影したアナログ信号又はデジタル信号による車両前方の画像信号から、画像処理技術によって車両前方の道路上に配置された障害物までの距離を検出することが可能である。本手法による障害物の距離の検出は、カメラの画素数や障害物の検出ロジックに応じて、所定の精度で行われるが、夜間走行やトンネル内走行のようにカメラ画像に障害物が撮像されない場合や、悪天候時において、障害物検出が不能であったり、また、障害物検出の精度が落ちたりする傾向がある。
そこで、本実施例では、カメラ装置31において記憶装置50を備える。記憶装置50には、カメラ装置21が持つ特性が保持されている。例えば、本記憶装置50は、カメラ装置21に備えられた障害物までの距離の検出方法によって検出した障害物までの距離と、その障害物までの距離において、実際に回避が行われたか否かを統計的に処理することで求めた誤差の範囲を、障害物の検出方法に対する精度として保持する。なお、カメラ装置による障害物までの距離の検出精度は、先述のように車両の走行環境の状況に大きく依存する。
そこで、車両周囲環境の明るさや天候を検出する装置に対する入力回路47を持ち、それら装置の入力に対して、公知のベイジアンネットに代表される確率的推論手法等を用いて、環境要因を加味した障害物までの距離検出の精度を算出しても良い。また、通常、カメラ装置21に障害物までの距離の検出は、テレビカメラが撮影した車両前方の光景に含まれる障害物に対してのみ行われる。障害物検出の方法や環境要因にも依るが、障害物までの距離の検出可能な範囲は、高々、0メートルから100メートル程度の範囲に収まる。従って、本事実も記憶装置50に、障害物までの距離の検出可能な範囲に対する制限として、保持する。
【0074】
本実施例における緊張度検出装置32の構成を図15に示す。緊張度計測装置32では、運転者の緊張度を測定する。運転者の緊張度の測定には、例えば、表面温度測定装置71を用いる。人間は緊張状態を強いられた場合、皮膚温の低下が観察される。そこで、本実施例では、表面温度測定装置71によって運転者の顔面の皮膚温を計測して、運転者の皮膚温の低下から障害物までの距離の検出の存在を推測することで、緊張度計測装置32を障害物までの距離を検出する状況検出手段10として利用する。しかし、本手法による障害物までの距離の検出は、運転者に緊張を強いる要因に対する運転者個々人の特性に大きく依存する。
そこで、本実施例では、緊張度計測装置32において記憶装置73を備える。本記憶装置は、緊張度計測装置32よって検出した運転者の緊張度に基づく障害物までの距離と、その障害物までの距離において、実際に回避が行われたか否かを統計的に処理することで求めた誤差の範囲を、本緊張度計測装置32による障害物までの距離を検出する方法に対する精度として保持する。
また、緊張度計測装置32による障害物までの距離の検出は、運転者が視認した車両周囲の光景に存在する障害物に対するものに限られる。障害物までの距離の検出方法や環境要因にも依るが、障害物までの距離を検出可能な範囲は、高々、0メートルから100メートル程度の範囲に収まる。従って、本事実も記憶装置73に、緊張度計測装置32による障害物検知の制限として、保持する。
【0075】
運転支援決定装置33は、自車両を操作する運転者の運転を支援する方法を決定する。本実施例では、制動特性制御装置34を制御することによって運転者の支援を実施する。一般に、運転者の制動操作に対する制動の特性を変更するものとして、運転者によるブレーキペダルのストローク量Sに対する制動力を変更可能とする技術が存在する。例えば、ブレーキペダルのストストロークSの速さΔSにおいて、ΔS>ΔS1が成立するとき、通常時に比べて大きな制動力を発するブレーキアシスト装置を導入することによって実現される。
【0076】
本実施例における運転支援決定装置33の構成を図16に示す。運転支援決定装置33は、車両が置かれている現在の状況や、車両が将来置かれる状況に基づいて、時系列的に、運転者の運転を支援する。例えば、運転支援決定装置33は、『障害物の手前では、ブレーキのアシスト力を増す』、等の支援ルール75を保持している。そして、そのルールは、一つの事象(本実施例では、障害物の出現)に対して、現在から将来までに行う支援を時系列的に細分化されて記述されている。例えば、『障害物まで500m(±40m)の時点で、障害物が存在する旨を告知する。』『障害物まで20m(±4m)の時点で、ブレーキのアシスト力の準備を実施する』『障害物回避の制動中は、距離(±0.5m)に応じて、ブレーキのアシスト力の補正を実施する』等のルールにより構成されている。
本ルールには、実際に支援を行うために必要な情報の種別(本例では、障害物までの距離)と、支援を行うために必要な精度(本例では、障害物までの距離の精度)が記されている。
【0077】
次に作用を説明する。
【0078】
ここで、時間Tkにおけるナビゲーション装置30、カメラ装置31、緊張度計測装置32、運転支援決定装置35、の処理は独立的に行われる。各処理の流れをフローチャートと共に、順を追って説明する。
【0079】
[運転支援決定装置の処理]
まず、運転支援決定装置35の処理の流れを図19に示す。この図において、基本的な処理の流れは図9に示す第1実施例の処理の流れと同一であり、同符号を付して重複した説明は省略する。
【0080】
ステップS200では、処理装置62において、ステップS101で立案した支援策が、緊急時の支援か否かを判断する。緊急時の支援とは、本車両用運転支援装置で検出する障害物が目前に位置しており、運転者もしくは本車両用運転支援装置にて、障害物を回避するために、急制動が必要な状況における支援を言う。緊急時の支援が不要な場合はステップS102に進み、緊急時の支援が必要な場合はステップS202に進む。
【0081】
ステップS202では、信頼度記憶装置68を参照する。信頼度記憶装置68には、例えば、図18に示されるように、情報を区間に分類し、各区間における各状況検出手段(本実施例では、ナビゲーション装置30、カメラ装置31、緊張度計測装置32)毎の信頼度が記載されている。
【0082】
ステップS203では、通信回路67を介して、緊急時の支援を実施するために必要な情報が含まれる区間における信頼度が最も高い状況検出手段に対して、情報提供の依頼を実施する。この際、精度要求は実施しない。この処理は、ステップS101で必要とする情報の取得を、信頼度の高い状況検出装置に依頼することを意味する。
【0083】
ステップS204では、ステップS203で依頼した情報を、信頼度の高い状況検出装置から、通信回路67を介して、直接的に取得する。処理はステップS100に戻り、本情報に基づいて運転者に対する支援が実施される。
【0084】
[ナビゲーション装置の処理]
次に、ナビゲーション装置30の処理の流れを、図20を用いて説明する。
【0085】
ステップS210では、運転支援決定装置33からの緊急な情報取得の依頼が来ているか否かを確認する。緊急の情報取得依頼が来ていた場合にはステップS211に進み、緊急の情報取得以来が来ていない場合にはステップS110に進む。
【0086】
ステップS110では、第一メモリ23を、新たな情報が書き加えられるまで、監視する。本手続きは、ナビゲーション装置30に備わった通信回路45を介して行う。
【0087】
ステップS111では、第一メモリ23に新たな情報が書き加えられた時、その情報の中で、ナビゲーション装置30が提供可能な情報が存在するか否かを検討する。例えば、図17に示した要求情報が提示された場合、ナビゲーション装置30は、ナビゲーション装置30に備えられた記憶装置44に保持された特性と、第一メモリ23に記載された区分ごとの要求情報の距離、種別、精度を比較して、ナビゲーション装置30で提供可能な情報の区分が存在すると判断されたとき、ステップS112に進む。提供可能な情報の区分が存在しないと判断した場合、ステップS110に戻る。
【0088】
ステップS112では、ナビゲーション装置30は情報の収集を実施する。例えば、第一メモリ23に、要求する情報の種別として『障害物の距離』、要求する情報の範囲として『10メートルから30メートル先』が提示され、ステップS111にて、この区分に情報を提供すると判断したとき、ナビゲーション装置30は、10メートルから30メートル先の障害物の有無と、障害物が存在する場合にはその距離を、現在の自車両の位置と地図情報及びインフラ情報から検索して取得する。この際、求めた障害物の距離に対する誤差も算出する。この誤差は、地図そのものの持つ誤差や、インフラ情報の精度、GPSが提供する自車両の位置に対する誤差を勘案した値であり、ナビゲーション装置30としての障害物までの距離を検出する精度情報として利用する。
【0089】
ステップS113では、確信度を算出する。この確信度は、第一メモリ23に提示された情報の要求をどれほど満たしているかを数値的に記述したものである。通常、実際の環境では、建造物の陰等で自車両の位置が正しく検出されなかったがためにナビゲーション装置30として本来持つ機能を発揮できない場合が存在する。また、例えば『±2メートル以内』の精度要求に対して、実際には±3メートルのであれば提供可能というような、要求を完全には満たさない情報を提供せざるをえない場合が存在する。確信度は、このような状況の元で、ナビゲーション装置30が情報を提供していることを数値として明示化するものである。
【0090】
ステップS114では、ナビゲーション装置30が算出した情報、本実施例では、障害物の位置を、精度を含めて、要求情報の区分ごとに、第二メモリ24に記述する。この際、ステップS113で算出した確信度を付随して記述する。本手続きは、ナビゲーション装置30に備わった通信回路45を介して行う。処理はステップS210に戻る。
【0091】
ステップS211では、緊急の情報収集を行う。運転支援決定装置33からは、例えば、要求する情報の種別として『障害物の距離』、要求する情報の範囲として『10メートルから30メートル先』が、直接的に提示される。ナビゲーション装置30は、10メートルから30メートル先の障害物の有無と、障害物が存在する場合にはその距離を、現在の自車両の位置と地図情報及びインフラ情報から検索して取得する。続いて、ステップS212で、取得した情報を、通信回路45を介して、運転支援決定装置33に直接的に出力する。
【0092】
[カメラ装置の処理]
以下、カメラ装置31の処理の流れを説明する。処理の流れは第20図に示したナビゲーション装置30の処理の流れと同様である。
【0093】
ステップS210では、運転支援決定装置33からの緊急な情報取得の依頼が来ているか否かを確認する。緊急の情報取得依頼が来ていた場合にはステップS211に進み、緊急の情報取得以来が来ていない場合にはステップS110に進む。
【0094】
ステップS110では、第一メモリ23を、新たな情報が書き加えられるまで、監視する。本手続きは、カメラ装置31に備わった通信回路51を介して行う。
【0095】
ステップS111では、第一メモリ23に新たな情報が書き加えられた時、その情報の中で、カメラ装置31が提供可能な情報が存在するか否かを検討する。例えば、7図17に示した要求情報が提示された場合、カメラ装置31は、カメラ装置31に備えられた記憶装置50に保持された特性と、第一メモリ23に記載された区分ごとの要求情報の距離、種別、精度を比較して、カメラ装置31で提供可能な情報の区分が存在すると判断されたとき、ステップS112に進む。提供可能な情報の区分が存在しないと判断した場合、ステップS110に戻る。
【0096】
ステップS112では、カメラ装置31は情報の収集を実施する。例えば、第一メモリ23に、要求する情報の種別として『障害物の距離』、要求する情報の範囲として『3メートルから10メートル先』が提示され、ステップS111にて、この区分に情報を提供すると判断したとき、カメラ装置31は、3メートルから10メートル先の障害物の有無と、障害物が存在する場合には障害物までの距離を、カメラ画像から計算して取得する。この際、求めた障害物までの距離に対する誤差も算出する。カメラそのものが持つ特性や、障害物を抽出する方法の誤差を勘案した値であり、カメラ装置31としての障害物までの距離を算出する精度情報として利用する。
【0097】
ステップS113では、確信度を算出する。この確信度は、第一メモリ23に提示された情報の要求をどれほど満たしているかを数値的に記述したものである。通常、実際の環境では、カメラで検出する障害物が正しく検出できなかったり、夜間等の走行によって撮像するために必要な明るさの不足によって、カメラが正常に機能しなかったりすることで、カメラ装置31として本来持つ機能を発揮できない場合が存在する。また、例えば、『±0.5メートル以内』の精度要求に対して、±1.0メートルのように、要求を満たさない情報を提供せざるをえない場合が存在する。確信度は、このような状況の元で、カメラ装置31が情報を提供していることを数値として明示化するものである。
【0098】
ステップS114では、カメラ装置31が算出した情報、本実施例では曲路の有無と、曲路が存在する場合にはその位置と曲率半径を、精度を含めて、要求情報の区分ごとに、第二メモリ24に記述する。この際、ステップS113で算出した確信度を付随して記述する。本手続きは、カメラ装置31に備わった通信回路51を介して行う。
【0099】
ステップS211では、緊急の情報収集を行う。運転支援決定装置33からは、例えば、要求する情報の種別として『障害物の距離』、要求する情報の範囲として『3 メートルから10メートル先』が、直接的に提示される。カメラ装置31は、3メートルから10メートル先の障害物の有無と、障害物が存在する場合にはその距離を、カメラ画像から計算して取得する。続いて、ステップS212で、取得した情報を、通信回路51を介して、運転支援決定装置33に直接的に出力する。
【0100】
[緊張度計測装置の処理]
以下、緊張度計測装置32の処理を説明する。処理の流れは図20に示したナビゲーション装置30の処理の流れと同様である。
【0101】
ステップS210では、運転支援決定装置33からの緊急な情報取得の依頼が来ているか否かを確認する。緊急の情報取得依頼が来ていた場合にはステップS211に進み、緊急の情報取得依頼が来ていない場合にはステップS110に進む。
【0102】
ステップS110では、第一メモリ23を、新たな情報が書き加えられるまで、監視する。本手続きは、緊張度計測装置32に備わった通信回路74を介して行う。
【0103】
ステップS111では、第一メモリ23に新たな情報が書き加えられた時、その情報の中で、緊張度計測装置32が提供可能な情報が存在するか否かを検討する。例えば図17に示した要求情報が提示された場合、緊張度計測装置32は、緊張度計測装置32に備えられた記憶装置73に保持された特性と、第一メモリ23に記載された区分ごとの要求情報の距離、種別、精度を比較して、緊張度計測装置32で提供可能な情報の区分が存在すると判断されたとき、ステップS112に進む。提供可能な情報の区分が存在しないと判断した場合、ステップS110に戻る。
【0104】
ステップS112では、緊張度計測装置32は情報の収集を実施する。例えば、第一メモリ23に、要求する情報の種別として『障害物の距離』、要求する情報の範囲として『0メートルから3メートル先』が提示され、ステップS111にて、この区分に情報を提供すると判断したとき、緊張度計測装置32は、0メートルから3メートル先の障害物の有無と、障害物が存在する場合には障害物までの距離を、運転者の緊張度から計算して取得する。この際、求めた障害物までの距離に対する誤差も算出する。緊張度の測定装置そのものが持つ特性や、障害物までの距離を抽出する方法の誤差を勘案した値であり、緊張度計測装置32としての障害物までの距離を算出する精度情報として利用する。
【0105】
ステップS113では、確信度を算出する。この確信度は、第一メモリ23に提示された情報の要求をどれほど満たしているかを数値的に記述したものである。通常、実際の環境では、表面温度測定装置71で検出する運転者の顔面画像が正しく撮像できなかったり、他の熱源の影響によって正常に機能しなかったりすることで、緊張度計測装置32として本来持つ機能を発揮できない場合が存在する。また、例えば、『±0.5メートル以内』の精度要求に対して、±1.0メートルのように、要求を満たさない情報を提供せざるをえない場合が存在する。確信度は、このような状況の元で、緊張度計測装置32が情報を提供していることを数値として明示化するものである。
【0106】
ステップS114では、緊張度計測装置32が算出した情報、本実施例では障害物の有無と、障害物が存在する場合には障害物までの距離を、精度を含めて、要求情報の区分ごとに、第二メモリ24に記述する。この際、ステップS113で算出した確信度を付随して記述する。本手続きは、緊張度計測装置32に備わった通信回路74を介して行う。
【0107】
ステップS211では、緊急の情報収集を行う。運転支援決定装置33からは、例えば、要求する情報の種別として『障害物の距離』、要求する情報の範囲として『0メートルから3メートル先』が、直接的に提示される。緊張度計測装置32は、0メートルから3メートル先の障害物の有無と、障害物が存在する場合にはその距離を、運転者の緊張度から計算して取得する。続いて、ステップS212で、取得した情報を、通信回路51を介して、運転支援決定装置33に直接的に出力する。
【0108】
[運転支援作用]
特開2000−62587号公報におけるプレビューブレーキシステムは、緊急時において、運転者のブレーキ踏力に対する制動力を、アシスト力を付加することで、自動的に増加させる装置である。従来、この類の装置では、緊急時であるという判断には、アクセルリリースからブレーキ操作までの一連の動作の特性に基づくものであり、具体的にはアクセルリリースの速度が所定値以上あった場合に、アシスト力を付加するものであった。
【0109】
しかし、本実施例においては、前方車両までの距離を測定することで、支援の要・不要をより確実に判断することが可能となり、また、前方車両までの距離に応じて必要なアシスト力を算出することで、より確実な危険回避を実現するアシスト力の付加が可能となった。
【0110】
次に、効果を説明する。
以上説明したように、第2実施例の車両用運転支援装置によれば、第1実施例に示した発明の効果に加え、下記の効果を得ることができる。
【0111】
(11) 前記運転支援決定手段13は、車両の状況が緊急事態か否かを判断する緊急事態判断手段を備え、緊急事態判断手段によって緊急事態と判断された場合には、前記信頼度保持手段を参照して、前記信頼度が高い前記状況検出手段に前記支援情報の出力を依頼するため、緊急時においては確実な情報に基づく運転者の支援を、素早く実施することが可能となる。
【0112】
(第3実施例)
図21は、本発明の第3実施例に係る車両用運転支援装置のブロック構成図である。この図において、基本構成は図12として示した第2実施例のブロック構成図と同一であり、同符号を付して重複した説明は省略する。この車両用運転支援装置には、ナビゲーション装置30、カメラ装置31、緊張度計測装置32、第一メモリ23、第二メモリ24、運転支援決定装置35、制動特性制御装置34が備わっている。
【0113】
運転支援決定装置35は、図1に示すクレーム対応図において、運転支援決定手段13を構成する。運転支援決定装置35は、自車両を操作する運転者の運転を支援する方法を決定する。本実施例では、制動特性制御装置34を制御することによって運転者の支援を実施する。一般に、運転者の制動操作に対する制動の特性を変更するものとして、運転者によるブレーキペダルのストローク量Sに対する制動力を変更可能とする技術が存在する。例えば、ブレーキペダルのストストロークSの速さΔSにおいて、ΔS>ΔS1が成立するとき、通常時に比べて大きな制動力を発するブレーキアシスト装置を導入することによって実現される。
【0114】
本実施例における運転支援決定装置35の構成を図22に示す。運転支援決定装置35は、車両が置かれている現在の状況や、車両が将来置かれる状況に基づいて、時系列的に、運転者の運転を支援する。例えば、運転支援決定装置35は、『障害物の手前では、ブレーキのアシスト力を増す』、等の支援ルール75を保持している。そして、そのルールは、一つの事象(本実施例では、障害物の出現)に対して、現在から将来までに行う支援を時系列的に細分化されて記述されている。例えば、1次支援として『障害物まで500m(±40m)の時点で、障害物が存在する旨を注意情報として告知する。』、2次支援として『障害物まで10m(±2m)の時点で、ブレーキのアシスト力の準備を実施し、警報を発する』、3次支援として『障害物回避の制動中は、距離(±0.5m)に応じて、ブレーキのアシスト力の付加を実施する』等のルールにより構成されている。本ルールには、実際に支援を行うために必要な情報の種別(本例では、障害物までの距離)と、支援を行うために必要な精度(本例では、障害物までの距離の精度)が記されている。
【0115】
次に、作用を説明する。
【0116】
[運転支援決定装置の処理]
運転支援決定装置35の処理の流れを図23に示す。この図において、基本的な処理の流れは図9に示す第1実施例の処理の流れと同一であり、同符号を付して重複した説明は省略する。
【0117】
ステップS300では、処理装置62にて、ステップS100 で実施した支援が、適切であったか否かを判断する。本判断は、例えば、事前に注意情報や警報を発したにも関わらず、最終的に障害物回避のためのブレーキアシスト力を付加する結果となったり、緊張度計測装置32によって計測された緊張度が高くなったりするなど、適切な支援が行われていれば観察されない事例が観察された場合において、支援が適切ではなかったと判断する。支援が適切であった場合はステップS101に進み、支援が不適切であった場合はステップS301に進む。
【0118】
ステップS301では、支援ルール修正装置76によって、支援ルール75を修正する。本支援ルールの修正は、例えば、本支援ルールが、1次支援として『障害物まで500m(±40m)の時点で、障害物が存在する旨を注意情報として告知する。』、2次支援として『障害物まで10m(±2m)の時点で、ブレーキのアシスト力の準備を実施し、警報を発する』、3次支援として『障害物回避の制動中は、距離(±0.5m )に応じて、ブレーキのアシスト力の付加を実施する』、という支援を行うルールで構成されていた場合で、最終的に障害物回避のためのブレーキアシスト力を付加する結果となってしまった場合、『障害物まで200m(±20m)の時点で、障害物が存在する旨を注意情報として再び告知する。』というルールを加えることで、運転者により安全な運転を行しめることが可能となる。通常、このような支援ルールの修正は、支援ルールを修正するためのルール、すなわち、メタルールを保持しておけば可能となる。例えば、『1次支援と2次支援を実施したにも関わらず、3次支援を実施する結果となった場合には、1次支援と2次支援の間に支援を加える』等のルールをメタルールとして保持しておけばよい。本実施例においては、支援ルール修正装置76が、このメタルールを保持している。支援ルールの修正が終了したら、ステップS101に進む。
【0119】
次に、効果を説明する。
以上説明したように、第3実施例の車両用運転支援装置によれば、第2実施例に示した発明の効果に加え、下記の効果を得ることができる。
【0120】
(12) 前記運転支援決定手段13は、支援方法を修正する支援方法修正手段を備え、時間列で段階を踏んで行われた支援において最終段階の支援が実施された場合には、前記支援方法修正手段は、前記運転支援決定手段の支援方法を修正することとしたので、個々の運転者に適した支援を実施することが可能となる。
すなわち、この支援ルールの修正は、従来、状況検出装置が既知であることが必要であったため、オンラインで実施することは困難であった。しかし、運転支援決定手段13において、支援に必要な情報の種別と範囲と精度によって支援ルールを記述することとした、言い換えると、支援ルールを修正するためのメタルールを保持し、支援ルールが適切ではなかった場合には支援ルール自身を修正するようにしたので、容易に支援ルールの修正を行うことができ、より効果的な運転者の支援が可能となった。
【0121】
以上、本発明の車両用運転支援装置を第1実施例〜第3実施例に基づき説明してきたが、具体的な構成については、これらの実施例に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
【0122】
例えば、第1〜第3実施例では、車両用運転支援装置が適用される制御装置として操舵角と転舵角の比である舵角比制御装置及びブレーキアシスト制御装置の例を示したが、操舵力アシスト制御装置や4輪操舵制御装置や車両挙動制御装置(=VDC制御装置)やABS制御装置や前後輪または左右輪の差動制限制御装置やサスペンション特性制御装置等、安全な運転を実現するための様々な車載制御システムに適用することができる。
【図面の簡単な説明】
【図1】本発明の車両用運転支援装置の構成を示すブロック図である。
【図2】第1実施例の車両用運転支援装置の構成を示すブロック図である。
【図3】第1実施例装置のナビゲーション装置の説明図である。
【図4】第1実施例装置のカメラ装置の説明図である。
【図5】第1実施例装置の横加速度計測装置の説明図である。
【図6】第1実施例装置の操舵特性制御装置の説明図である。
【図7】第1実施例装置の運転支援決定装置の説明図である。
【図8】第1実施例装置の運転支援決定装置が第一メモリ23に記述する情報を説明する図である。
【図9】第1実施例装置の運転支援決定装置が信頼度記憶装置に保持する情報を説明する図である。
【図10】第1実施例装置の運転支援決定装置における演算処理手順を示すフローチャートである。
【図11】第1実施例装置のナビゲーション装置、カメラ装置、横加速度計測装置における演算処理手順を示すフローチャートである。
【図12】第2実施例の車両用運転支援装置の構成を示すブロック図である。
【図13】第2実施例装置のナビゲーション装置の説明図である。
【図14】第2実施例装置のカメラ装置の説明図である。
【図15】第2実施例装置の緊張度計測装置の説明図である。
【図16】第2実施例装置の運転支援決定装置の説明図である。
【図17】第2実施例装置の運転支援決定装置が第一メモリ23に記述する情報を説明する図である。
【図18】第2実施例装置の運転支援決定装置が信頼度記憶装置に保持する情報を説明する図である。
【図19】第2実施例装置の運転支援決定装置における演算処理手順を示すフローチャートである。
【図20】第2実施例装置のナビゲーション装置、カメラ装置、緊張度計測装置における演算処理手順を示すフローチャートである。
【図21】第3実施例の車両用運転支援装置の構成を示すブロック図である。
【図22】第3実施例装置の運転支援決定装置の説明図である。
【図23】第3実施例装置の運転支援決定装置における演算処理手順を示すフローチャートである。
【符号の説明】
10 状況検出手段
11 第一記憶手段
12 第二記憶手段
13 運転支援決定手段
14 制御手段
Claims (12)
- 車両の走行時における状況を検出する状況検出手段と、
運転者の支援方法を決定する運転支援決定手段と、
前記運転支援決定手段の決定した支援方法に基づき、車両の制御を行う制御手段と、
を有する車両用運転支援装置において、
前記運転支援決定手段が出力した情報を保持するとともに、前記状況検出手段が前記情報を参照することを許可した第一記憶手段と、
前記状況検出手段が出力した情報を保持するとともに、前記運転支援決定手段が前記情報を参照することを許可した第二記憶手段と、
を備えたことを特徴とする車両用運転支援装置。 - 請求項1に記載の車両用運転支援装置において、
前記運転支援決定手段の決定する支援方法は、時間的に多段階なものであり、更に、前記状況検出手段が検出可能な状況の種別と、検出可能な状況の範囲と、検出可能な状況の精度とに関わらず、多段階な運転者の支援方法の決定に必要な情報の種別と、前記必要な情報の範囲と、前記必要な情報の精度を、時間的な段階ごとに算出することを特徴とする車両用運転支援装置。 - 請求項1または請求項2に記載の車両用運転支援装置において、
前記第一記憶手段に対して前記運転支援決定手段が出力して保持された情報は、前記運転支援決定手段が算出した多段階的な、運転者を支援するために必要な情報の種別を示した必要種別と、前記必要な情報の範囲を示した必要範囲と、前記必要な情報の精度を示した必要精度と、であり、
前記第一記憶手段は、多段階的な前記必要種別と、前記必要範囲と、前記必要精度とを必要情報として保持することを特徴とする車両用運転支援装置。 - 請求項1乃至請求項3の何れか1項に記載の車両用運転支援装置において、
前記状況検出手段は、検出可能な状況の種別を示した検出種別と、検出可能な状況の範囲を示した検出範囲と、検出可能な状況の精度を示した検出精度とを検出情報として保持する保持手段と、
前記第一記憶手段に保持された前記必要情報を参照する参照手段と、
前記第一記憶手段が保持する必要情報に対して、前記保持手段が保持する前記検出情報が満たす度合いを確信度として算出する確信度算出手段と、
を備えたことを特徴とする車両用運転支援装置。 - 請求項1乃至請求項4の何れか1項に記載の車両用運転支援装置において、
前記状況検出手段が検出可能な状況を示す前記検出種別は、車両の走行経路における道路線形と、障害物位置と、自車両位置と、路面状況と、天候と、明るさと、運転者の緊張度と、運転者の負荷状況と、の全て、もしくは、いずれかであることを特徴とする車両用運転支援装置。 - 請求項1乃至請求項5の何れか1項に記載の車両用運転支援装置において、
前記状況検出手段を、前記状況検出手段の検出種別毎に少なくとも2つ以上を備えることを特徴とする車両用運転支援装置。 - 請求項6に記載の車両用運転支援装置において、
前記第二記憶手段に対して前記状況検出手段が出力して保持された情報は、前記状況検出手段の前記確信度算出手段が算出した確信度と、前記状況検出手段の前記保持手段が保持する前記検出情報と、であり、
前記第二記憶手段は、前記確信度と、前記検出情報とを状況検出手段毎の支援情報として保持することを特徴とする車両用運転支援装置。 - 請求項6または請求項7に記載の車両用運転支援装置において、
前記運転支援決定手段は、前記第二記憶手段に保持された前記支援情報を参照する参照手段を備え、
前記参照手段によって前記第二記憶手段を参照した時、前記状況検出手段毎の前記支援情報において、前記検出範囲が重複している場合には、前記支援情報における前記確信度が大きい前記支援情報を選択する支援情報選択手段と、
を備えたことを特徴とする車両用運転支援装置。 - 請求項8に記載の車両用運転支援装置において、
前記運転支援決定手段は、個々の状況検出手段に対応した信頼度を保持する信頼度保持手段を備え、
前記支援情報選択手段において複数の支援情報から特定の支援情報が選択された場合には、前記特定の支援情報を前記第二記憶手段に出力した前記状況検出手段に対応する信頼度を増加させることを特徴とする車両用運転支援装置。 - 請求項8または請求項9に記載の車両用運転支援装置において、
前記支援情報選択手段における前記支援情報の選択は、前記検出範囲が重複しており、かつ、前記確信度が同等の場合には、前記信頼度保持手段に保持された前記信頼度が高い前記状況検出手段が前記第二記憶手段に出力した前記支援情報を選択することを特徴とする車両用運転支援装置。 - 請求項9または請求項10に記載の車両用運転支援装置において、
前記運転支援決定手段は、車両の状況が緊急事態か否かを判断する緊急事態判断手段を備え、
緊急事態判断手段によって緊急事態と判断された場合には、前記信頼度保持手段を参照して、前記信頼度が高い前記状況検出手段に前記支援情報の出力を依頼することを特徴とする車両用運転支援装置。 - 請求項1乃至請求項11の何れか1項に記載の車両用運転支援装置において、
前記運転支援決定手段は、支援方法を修正する支援方法修正手段を備え、
時間列で段階を踏んで行われた支援において最終段階の支援が実施された場合には、前記支援方法修正手段は、前記運転支援決定手段の支援方法を修正することを特徴とする車両用運転支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003125199A JP2004334283A (ja) | 2003-04-30 | 2003-04-30 | 車両用運転支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003125199A JP2004334283A (ja) | 2003-04-30 | 2003-04-30 | 車両用運転支援装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004334283A true JP2004334283A (ja) | 2004-11-25 |
Family
ID=33502536
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003125199A Pending JP2004334283A (ja) | 2003-04-30 | 2003-04-30 | 車両用運転支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004334283A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007041788A (ja) * | 2005-08-02 | 2007-02-15 | Nissan Motor Co Ltd | 障害物判断装置及び方法 |
| JP2008241276A (ja) * | 2007-03-26 | 2008-10-09 | Alpine Electronics Inc | 車載用ナビゲーション装置 |
| JP2010000951A (ja) * | 2008-06-20 | 2010-01-07 | Toyota Motor Corp | 運転支援装置 |
| JP2010000949A (ja) * | 2008-06-20 | 2010-01-07 | Toyota Motor Corp | 運転支援装置 |
| US8401736B2 (en) | 2008-06-20 | 2013-03-19 | Toyota Jidosha Kabushiki Kaisha | Driving assistance apparatus and driving assistance method |
-
2003
- 2003-04-30 JP JP2003125199A patent/JP2004334283A/ja active Pending
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007041788A (ja) * | 2005-08-02 | 2007-02-15 | Nissan Motor Co Ltd | 障害物判断装置及び方法 |
| JP4517972B2 (ja) * | 2005-08-02 | 2010-08-04 | 日産自動車株式会社 | 障害物判断装置及び方法 |
| JP2008241276A (ja) * | 2007-03-26 | 2008-10-09 | Alpine Electronics Inc | 車載用ナビゲーション装置 |
| JP2010000951A (ja) * | 2008-06-20 | 2010-01-07 | Toyota Motor Corp | 運転支援装置 |
| JP2010000949A (ja) * | 2008-06-20 | 2010-01-07 | Toyota Motor Corp | 運転支援装置 |
| JP4737239B2 (ja) * | 2008-06-20 | 2011-07-27 | トヨタ自動車株式会社 | 運転支援装置 |
| JP4737238B2 (ja) * | 2008-06-20 | 2011-07-27 | トヨタ自動車株式会社 | 運転支援装置 |
| US8401736B2 (en) | 2008-06-20 | 2013-03-19 | Toyota Jidosha Kabushiki Kaisha | Driving assistance apparatus and driving assistance method |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3644294B1 (en) | Vehicle information storage method, vehicle travel control method, and vehicle information storage device | |
| JP6711016B2 (ja) | 走行支援装置 | |
| CN109795491B (zh) | 驾驶辅助装置 | |
| JP6036371B2 (ja) | 車両用運転支援システム及び運転支援方法 | |
| JP6252670B2 (ja) | 注意案内システム、方法およびプログラム | |
| US10703363B2 (en) | In-vehicle traffic assist | |
| JP2016095851A (ja) | 自律的な乗客用の乗り物のためのコンピューティング装置、コンピュータにより実施される方法及びシステム | |
| JP6932209B2 (ja) | 車両制御装置、車両、および車両制御方法 | |
| US20210221403A1 (en) | Perception performance evaluation of a vehicle adas or ads | |
| US10752260B2 (en) | Driving assistance device for vehicle, non-transitory computer-readable storage medium, and control method | |
| JP2008040795A (ja) | 車両の運転支援制御装置および方法 | |
| JP7103161B2 (ja) | 地図情報システム | |
| JP2020052607A (ja) | 情報処理システム | |
| JP6941178B2 (ja) | 自動運転制御装置及び方法 | |
| CN113734193A (zh) | 用于估计接管时间的系统和方法 | |
| JP2005182310A (ja) | 車両運転支援装置 | |
| JP6991053B2 (ja) | 車載装置、情報提示方法 | |
| WO2019152049A1 (en) | Map discrepancy identification with centralized map data | |
| JP2004334283A (ja) | 車両用運転支援装置 | |
| EP4089498B1 (en) | Autonomous driving system, autonomous driving control method, and non-transitory storage medium | |
| JP2017151693A (ja) | 漫然運転検出システム及び漫然運転検出方法 | |
| JP7476833B2 (ja) | 車両制御装置、車両制御用コンピュータプログラム及び車両制御方法 | |
| JP7351283B2 (ja) | ドライバへの通知装置 | |
| JP2006224904A (ja) | 車両制御装置 | |
| JP7198005B2 (ja) | 自車位置検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20051117 |