JP2004195234A - 放射線撮像装置の較正の方法及び装置 - Google Patents
放射線撮像装置の較正の方法及び装置 Download PDFInfo
- Publication number
- JP2004195234A JP2004195234A JP2003419026A JP2003419026A JP2004195234A JP 2004195234 A JP2004195234 A JP 2004195234A JP 2003419026 A JP2003419026 A JP 2003419026A JP 2003419026 A JP2003419026 A JP 2003419026A JP 2004195234 A JP2004195234 A JP 2004195234A
- Authority
- JP
- Japan
- Prior art keywords
- calibration
- projection
- parameters
- acquisition
- projection parameters
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000005855 radiation Effects 0.000 title claims abstract description 14
- 238000000034 method Methods 0.000 title claims description 33
- 238000003384 imaging method Methods 0.000 claims description 12
- 239000011159 matrix material Substances 0.000 claims description 11
- 238000013213 extrapolation Methods 0.000 claims description 8
- 230000001419 dependent effect Effects 0.000 claims 1
- 210000003484 anatomy Anatomy 0.000 description 7
- 238000010586 diagram Methods 0.000 description 4
- 239000003550 marker Substances 0.000 description 4
- 230000000694 effects Effects 0.000 description 2
- 238000001356 surgical procedure Methods 0.000 description 2
- 210000004204 blood vessel Anatomy 0.000 description 1
- 210000000988 bone and bone Anatomy 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 244000045947 parasite Species 0.000 description 1
- 238000012892 rational function Methods 0.000 description 1
Images





Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment
- A61B6/58—Testing, adjusting or calibrating apparatus or devices for radiation diagnosis
- A61B6/582—Calibration
- A61B6/583—Calibration using calibration phantoms
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Engineering & Computer Science (AREA)
- Radiology & Medical Imaging (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Physics & Mathematics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- High Energy & Nuclear Physics (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Measurement Of Radiation (AREA)
- Nuclear Medicine (AREA)
- Transforming Light Signals Into Electric Signals (AREA)
Abstract
【解決手段】放射線撮像装置の較正を行なう際に、較正対象(7)に関して装置を移動させて、各回の取得を装置の較正位置(x)に関連付けて一連の取得を実行する。実行された取得に基づいて、装置の各々の較正位置(x)に関連する投影パラメータ(ax1、px1)を決定する。取得時に装置が取っていない追加位置(yi)については、較正位置(xi)に関連するパラメータ(ax1、px1)に従ってこの追加位置に関連する投影パラメータ値(ayi、pyi)を決定する。
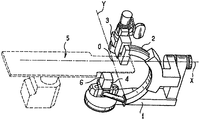
【選択図】 図1
Description
較正対象に関して装置を移動させて、各回の取得を装置の較正位置に関連付けて一連の取得を実行する工程と、
実行された取得に基づいて、装置の各々の較正位置に関連する投影パラメータを決定する工程と、
上述の取得工程時に装置が取っていない追加位置について、上述の較正位置に関連するパラメータに従ってこの追加位置に関連する投影パラメータ値を決定する工程とを含んでいる。

2 C字形アーム
3 線源
4 画像検出器
5 テーブル
6 検出器平面
7 ファントム
10 撮像対象
Claims (12)
- 較正対象(7)に関して当該放射線撮像装置(2、3、4)を移動させて、各回の取得を前記装置の較正位置(x)に関連付けて一連の取得を実行する工程と、
実行された前記取得に基づいて、前記装置の各々の較正位置(x)に関連する投影パラメータ(ax1、px1)を決定する工程と、
前記取得工程時に前記装置が取っていない追加位置(yi)について、前記較正位置(xi)に関連する前記パラメータ(ax1、px1)に従って前記追加位置に関連する投影パラメータ値(ayi、pyi)を決定する工程とを備えた放射線撮像装置の較正方法。 - 前記投影パラメータ(ax1、px1)は、前記装置の空間内での配置の特徴を表わす幾何学的パラメータを含んでいる、請求項1に記載の方法。
- 前記投影パラメータ(ax1、px1)は、放射線を放出する手段(3)及び画像を取得する手段(4)の特徴を表わす幾何学的パラメータを含んでいる、請求項1又は請求項2に記載の方法。
- 前記投影パラメータは、画像を取得する手段(4)の平面(6)内で三次元空間における対象の投影を定義するグローバル行列の係数(px1)を含んでいる、請求項1〜請求項3のいずれか一項に記載の方法。
- 前記追加位置(yi)に関連する前記投影パラメータ(ax1、px1)は、前記較正位置に関連する前記投影パラメータ(ax1、px1)の補間則又は補外則により決定される、請求項1〜請求項4のいずれか一項に記載の方法。
- 前記補間則は、線形、多項式型又は有理数型である、請求項5に記載の方法。
- 前記追加位置(yi)に関連する前記投影パラメータ(ax1、px1)は、前記追加位置(yi)に最も近接した前記装置の前記較正位置(xi)に関連する前記投影パラメータ(ax1、px1)の結合により決定され、考慮に入れられる位置の数は5未満である、請求項1〜請求項6のいずれか一項に記載の方法。
- 考慮に入れられる前記位置(xi)の数は2に等しい、請求項7に記載の方法。
- 各々の装置較正位置(xi)に関連する前記投影パラメータ(ax1、px1)を決定する前記工程において、前記投影パラメータの幾つかは、既知の情報及び/又は他の幾何学的投影パラメータに依存する法則により定義される、請求項1〜請求項8のいずれか一項に記載の方法。
- 三次元モデルが、放射線を放出する手段(3)を有する装置からの取得画像から再構成され、
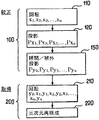
請求項1〜請求項9のいずれか一項による較正段階(100)、並びに
撮像対象(10)に関して前記装置(2、3、4)を移動させて、各回の取得を前記放射線を放出する手段(3)の較正位置又は追加位置(xi、yi)に関連付けて一連の取得を実行する工程と、
取得された前記画像及び前記較正段階で決定された前記関連する投影パラメータ(axi、pxi、ayi、pyi)から前記対象(10)の三次元モデルを再構成する工程とを備えた取得段階(200)を含んでいる請求項1〜請求項9のいずれか一項に記載の方法。 - 放射線を放出する手段(3)と、
較正対象(7)を設ける手段と、
該較正対象の画像を取得する手段と、
前記較正対象(7)に関して当該放射線撮像装置を移動させる手段と、
各回の取得を前記装置の較正位置に関連付けて一連の取得を実行する手段と、
実行された前記取得に基づいて、前記装置の各々の較正位置手段に関連する投影パラメータを決定する手段と、
前記取得時に前記装置が取っていない追加位置について、前記較正位置に関連する前記パラメータに従って前記追加位置に関連する前記投影パラメータ値を決定する手段とを備えた放射線撮像装置を較正する装置。 - 放射線を放出する手段(3)と、
較正対象(7)を設ける手段と、
該較正対象の画像を取得する手段と、
前記較正対象(7)に関して当該装置を移動させる手段と、
撮像対象(10)を設ける手段と、
各回の取得を前記装置の較正位置に関連付けて一連の取得を実行する手段と、
実行された前記取得に基づいて、前記装置の各々の較正位置に関連する投影パラメータを決定する手段と、
前記取得時に前記装置が取っていない追加位置について、前記較正位置に関連する前記パラメータに従って前記追加位置に関連する前記投影パラメータ値を決定する手段と、
取得された前記画像及び前記較正段階時に決定された前記関連する投影パラメータ(axi、pxi、ayi、pyi)から前記対象(10)の三次元モデルを再構成する手段とを備えた取得画像から三次元モデルを再構成する装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0216078A FR2848806B1 (fr) | 2002-12-18 | 2002-12-18 | Procede de calibrage d'un appareil d'imagerie radiologique necessitant un nombre limite d'acquisitions |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004195234A true JP2004195234A (ja) | 2004-07-15 |
| JP2004195234A5 JP2004195234A5 (ja) | 2007-02-01 |
Family
ID=32338931
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003419026A Pending JP2004195234A (ja) | 2002-12-18 | 2003-12-17 | 放射線撮像装置の較正の方法及び装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7066646B2 (ja) |
| JP (1) | JP2004195234A (ja) |
| DE (1) | DE10358158A1 (ja) |
| FR (1) | FR2848806B1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006167455A (ja) * | 2004-12-17 | 2006-06-29 | General Electric Co <Ge> | イメージング・システムの取得時幾何学的構成のための方法及び装置 |
| JP2006223868A (ja) * | 2005-02-16 | 2006-08-31 | General Electric Co <Ge> | 撮像の幾何学的パラメータを決定する方法及び装置 |
| JP2011025003A (ja) * | 2009-02-12 | 2011-02-10 | General Electric Co <Ge> | 医用撮像システムのテーブルとc字アームの相対的位置に関する較正手順 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103961130B (zh) * | 2006-09-25 | 2017-08-15 | 马佐尔机器人有限公司 | 使得c型臂系统适应以提供三维成像信息的方法 |
| US7853061B2 (en) * | 2007-04-26 | 2010-12-14 | General Electric Company | System and method to improve visibility of an object in an imaged subject |
| DE102008017817B4 (de) * | 2008-04-08 | 2010-10-28 | Siemens Aktiengesellschaft | Verfahren zum Bereitstellen zumindest einer optimierten 3D-Rekonstruktion |
| DE102009015144A1 (de) * | 2009-03-26 | 2010-09-30 | Siemens Aktiengesellschaft | Verfahren zum Gewinnen einer Abbildungsvorschrift für ein Röntgenbildaufnahmesystem |
| DE102014203971A1 (de) * | 2014-03-05 | 2015-09-10 | Friedrich-Alexander-Universität Erlangen-Nürnberg | Verfahren zur Aufnahme und Rekonstruktion eines Bilddatensatzes und Röntgeneinrichtung |
| US10702226B2 (en) | 2015-08-06 | 2020-07-07 | Covidien Lp | System and method for local three dimensional volume reconstruction using a standard fluoroscope |
| US10699448B2 (en) | 2017-06-29 | 2020-06-30 | Covidien Lp | System and method for identifying, marking and navigating to a target using real time two dimensional fluoroscopic data |
| EP3694412A4 (en) | 2017-10-10 | 2021-08-18 | Covidien LP | SYSTEM AND METHOD FOR IDENTIFYING AND MARKING A TARGET IN A THREE-DIMENSIONAL FLUOROSCOPIC RECONSTRUCTION |
| US10905498B2 (en) | 2018-02-08 | 2021-02-02 | Covidien Lp | System and method for catheter detection in fluoroscopic images and updating displayed position of catheter |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4352020A (en) * | 1979-01-11 | 1982-09-28 | Hitachi Medical Corporation | Method and apparatus for examining a subject |
| JPS61181443A (ja) * | 1985-01-03 | 1986-08-14 | ゼネラル・エレクトリツク・カンパニイ | 回転式扇形ビ−ムct装置の回転中心のずれを補正する方法と装置 |
| EP0343600A1 (fr) * | 1988-05-24 | 1989-11-29 | GENERAL MEDICAL MERATE S.p.A. | Procédé de calibration numérique d'une installation de radiologie et installation de calibration numérique pour la mise en oeuvre du procédé |
| JPH0444743A (ja) * | 1990-06-11 | 1992-02-14 | Mitsubishi Electric Corp | Ct装置のデータ補正装置 |
| US5214578A (en) * | 1988-06-10 | 1993-05-25 | General Electric Cgr Sa | Method and system for the calibration of an x-ray scanner using an off-centered circular phantom |
| US5963612A (en) * | 1997-12-31 | 1999-10-05 | Siemens Corporation Research, Inc. | Apparatus for C-arm calibration for 3D reconstruction in an imaging system utilizing planar transformation |
| JP2001101392A (ja) * | 1999-08-30 | 2001-04-13 | Ge Medical Syst Sa | 画像を自動的にレジストレーションする方法 |
| US6285902B1 (en) * | 1999-02-10 | 2001-09-04 | Surgical Insights, Inc. | Computer assisted targeting device for use in orthopaedic surgery |
| JP2002531210A (ja) * | 1998-12-08 | 2002-09-24 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | X線検査装置及び歪みのないx線画像を発生させる方法 |
| JP2003019128A (ja) * | 2001-04-27 | 2003-01-21 | Ge Medical Systems Global Technology Co Llc | イメージング・システムを較正するシステム及び方法、並びに記憶媒体 |
| JP2003024321A (ja) * | 2001-03-13 | 2003-01-28 | Ge Medical Systems Global Technology Co Llc | 断層撮影法によって得た像から3次元モデルを再構成するための較正方法 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2700909B1 (fr) | 1993-01-27 | 1995-03-17 | Gen Electric Cgr | Dispositif et procédé automatique de calibration géométrique d'un système d'imagerie par rayons X. |
| US5712895A (en) * | 1997-01-14 | 1998-01-27 | Picker International, Inc. | Rotational digital subtraction angiography phantom |
| US6379043B1 (en) * | 1998-12-08 | 2002-04-30 | U.S. Philips Corporation | X-ray examination apparatus and method for generating distortion-free X-ray images |
-
2002
- 2002-12-18 FR FR0216078A patent/FR2848806B1/fr not_active Expired - Fee Related
-
2003
- 2003-12-10 DE DE10358158A patent/DE10358158A1/de not_active Withdrawn
- 2003-12-16 US US10/737,078 patent/US7066646B2/en not_active Expired - Fee Related
- 2003-12-17 JP JP2003419026A patent/JP2004195234A/ja active Pending
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4352020A (en) * | 1979-01-11 | 1982-09-28 | Hitachi Medical Corporation | Method and apparatus for examining a subject |
| JPS61181443A (ja) * | 1985-01-03 | 1986-08-14 | ゼネラル・エレクトリツク・カンパニイ | 回転式扇形ビ−ムct装置の回転中心のずれを補正する方法と装置 |
| EP0343600A1 (fr) * | 1988-05-24 | 1989-11-29 | GENERAL MEDICAL MERATE S.p.A. | Procédé de calibration numérique d'une installation de radiologie et installation de calibration numérique pour la mise en oeuvre du procédé |
| US5214578A (en) * | 1988-06-10 | 1993-05-25 | General Electric Cgr Sa | Method and system for the calibration of an x-ray scanner using an off-centered circular phantom |
| JPH0444743A (ja) * | 1990-06-11 | 1992-02-14 | Mitsubishi Electric Corp | Ct装置のデータ補正装置 |
| US5963612A (en) * | 1997-12-31 | 1999-10-05 | Siemens Corporation Research, Inc. | Apparatus for C-arm calibration for 3D reconstruction in an imaging system utilizing planar transformation |
| JP2002531210A (ja) * | 1998-12-08 | 2002-09-24 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | X線検査装置及び歪みのないx線画像を発生させる方法 |
| US6285902B1 (en) * | 1999-02-10 | 2001-09-04 | Surgical Insights, Inc. | Computer assisted targeting device for use in orthopaedic surgery |
| JP2001101392A (ja) * | 1999-08-30 | 2001-04-13 | Ge Medical Syst Sa | 画像を自動的にレジストレーションする方法 |
| JP2003024321A (ja) * | 2001-03-13 | 2003-01-28 | Ge Medical Systems Global Technology Co Llc | 断層撮影法によって得た像から3次元モデルを再構成するための較正方法 |
| JP2003019128A (ja) * | 2001-04-27 | 2003-01-21 | Ge Medical Systems Global Technology Co Llc | イメージング・システムを較正するシステム及び方法、並びに記憶媒体 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006167455A (ja) * | 2004-12-17 | 2006-06-29 | General Electric Co <Ge> | イメージング・システムの取得時幾何学的構成のための方法及び装置 |
| JP2006223868A (ja) * | 2005-02-16 | 2006-08-31 | General Electric Co <Ge> | 撮像の幾何学的パラメータを決定する方法及び装置 |
| JP2011025003A (ja) * | 2009-02-12 | 2011-02-10 | General Electric Co <Ge> | 医用撮像システムのテーブルとc字アームの相対的位置に関する較正手順 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20040202288A1 (en) | 2004-10-14 |
| DE10358158A1 (de) | 2004-06-24 |
| FR2848806A1 (fr) | 2004-06-25 |
| FR2848806B1 (fr) | 2005-11-04 |
| US7066646B2 (en) | 2006-06-27 |
| DE10358158A8 (de) | 2005-04-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4904048B2 (ja) | イメージング・システムの取得時幾何学的構成のための方法及び装置 | |
| US10172574B2 (en) | Interventional X-ray system with automatic iso-centering | |
| US8045677B2 (en) | Shifting an object for complete trajectories in rotational X-ray imaging | |
| JP4495926B2 (ja) | X線立体再構成処理装置、x線撮影装置、x線立体再構成処理方法及びx線立体撮影補助具 | |
| JP4340334B2 (ja) | 対象と対象の3次元表現との間の変換を決定する方法及びその装置 | |
| US8886286B2 (en) | Determining and verifying the coordinate transformation between an X-ray system and a surgery navigation system | |
| JP5209979B2 (ja) | 無較正の幾何学的構成における三次元撮像の方法及びシステム | |
| EP2835150A1 (en) | Radiotherapy system | |
| JP2009022754A (ja) | 放射線画像の位置揃えを補正する方法 | |
| US20100172472A1 (en) | Collecting images for image stitching with rotating a radiation detector | |
| JP2006150080A (ja) | 回転血管撮影のための血管撮影x線診断装置 | |
| JP2007229473A (ja) | X線診断装置 | |
| JP2004188163A (ja) | 断層撮影装置 | |
| US20100329534A1 (en) | Method and device for the acquisition of x-ray images for a three-dimensional image reconstruction | |
| JP2004195234A (ja) | 放射線撮像装置の較正の方法及び装置 | |
| KR20180093939A (ko) | X-선 이미지를 보정하는 방법 | |
| CN113298745B (zh) | Cta三维重建镜像数据图像投影方法、图像处理方法及装置 | |
| JP5844732B2 (ja) | インターベンション装置を観察するためのシステム及び方法 | |
| US8213565B2 (en) | Method for correcting truncated projection data | |
| JP2020501738A (ja) | ショートスキャン偏心検出器x線トモグラフィのための冗長重み付け | |
| JP5016231B2 (ja) | 撮像の幾何学的パラメータを決定する方法及び装置 | |
| Navab et al. | Camera-augmented mobile C-arm (CAMC) application: 3D reconstruction using a low-cost mobile C-arm | |
| JP2008148964A (ja) | 放射線治療用複合装置およびアライメント補正用データ作成方法 | |
| JP4429709B2 (ja) | X線断層撮影装置 | |
| JP7439075B2 (ja) | パノラマx線撮影画像を編集するためのデバイス及び方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061213 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061213 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20061213 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20070117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100126 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100629 |