JP2004182010A - 車両用定速走行装置 - Google Patents
車両用定速走行装置 Download PDFInfo
- Publication number
- JP2004182010A JP2004182010A JP2002348433A JP2002348433A JP2004182010A JP 2004182010 A JP2004182010 A JP 2004182010A JP 2002348433 A JP2002348433 A JP 2002348433A JP 2002348433 A JP2002348433 A JP 2002348433A JP 2004182010 A JP2004182010 A JP 2004182010A
- Authority
- JP
- Japan
- Prior art keywords
- constant
- speed
- speed traveling
- vehicle
- constant speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Auxiliary Drives, Propulsion Controls, And Safety Devices (AREA)
- Controls For Constant Speed Travelling (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Abstract
【課題】簡易な操作で定速走行を実現すると共に、急なアクセル操作、ブレーキ操作にも対応可能とする。
【解決手段】車両が略一定の車速を保持した状態で設定時間経過した時に、定速走行開始条件を成立させ(S4、S5)、その時の車速で定速走行制御を開始する(S9〜S11)。また、定速走行開始条件成立時に、そのときのアクセル開度を記憶しておく(S8)。その後、アクセル開度が前記記憶開度に対する設定範囲(Am±E)外となった時に、定速走行解除条件を成立させ(S12)、通常制御に移行する(S19)。
【選択図】 図3
【解決手段】車両が略一定の車速を保持した状態で設定時間経過した時に、定速走行開始条件を成立させ(S4、S5)、その時の車速で定速走行制御を開始する(S9〜S11)。また、定速走行開始条件成立時に、そのときのアクセル開度を記憶しておく(S8)。その後、アクセル開度が前記記憶開度に対する設定範囲(Am±E)外となった時に、定速走行解除条件を成立させ(S12)、通常制御に移行する(S19)。
【選択図】 図3
Description
【0001】
【発明の属する技術分野】
本発明は、車両用定速走行装置に関する。
【0002】
【従来の技術】
従来、簡易型の定速走行装置として、特許文献1に記載のものがある。
これは、車両が略一定の車速を保持した状態で所定時間経過すると、略一定の車速にて定速走行すべくエンジンの出力を制御し、定速走行制御中にアクセルペダルが踏み込まれると、定速走行を解除するようにしている。
【0003】
【特許文献1】特開2000−6682号公報
【0004】
【発明が解決しようとする課題】
しかしながら、上記の定速走行装置では、車両が略一定の車速を保持した状態で所定時間経過すると、定速走行に入るが、この際、アクセルペダルから一旦足を離し、解除する場合に、再びアクセルペダルへ足を戻す必要があり、誤操作を引き起こしかねない。また、アクセルペダルから足を離しているので、急なアクセル操作を瞬時に行うことが困難であるばかりか、足の置き所がなくて急なブレーキ操作もまごつくことがあった。
【0005】
本発明は、このような従来の問題点に鑑み、簡易な操作で定速走行を実現できると共に、急なアクセル操作、ブレーキ操作にも対応できる定速走行装置を提供することを目的とする。
【0006】
【課題を解決するための手段】
このため、本発明では、車両が略一定の車速を保持した状態で設定時間経過した時に、定速走行を開始させる一方、このときのアクセル開度を記憶しておき、その後、アクセル開度が前記記憶開度に対する設定範囲外となった時に、定速走行を解除させる構成とする。
【0007】
【発明の効果】
本発明によれば、略一定の車速での経過時間により定速走行を開始させ、定速走行中もアクセルペダルを踏んでいて、アクセルペダルを踏み増すか、足を離すことで、定速走行を解除するため、アクセルペダルのみの簡易な操作で定速走行を実現できる一方、急なアクセル操作、ブレーキ操作にも対応できる。
【0008】
【発明の実施の形態】
以下に本発明の実施の形態を図面に基づいて説明する。
図1は本発明の一実施形態を示す車両用エンジンの電制スロットル弁の制御システム図である。
【0009】
電制スロットル弁1は、エンジン吸気系にて吸入空気量を制御することによりエンジン出力を制御するもので、モータ等のアクチュエータを含んで構成され、エンジンコントロールユニット(以下ECUという)2からの駆動信号により駆動される。
【0010】
ECU2は、機能的に見て、通常制御用の目標エンジントルク演算部3と、定速走行制御用の目標エンジントルク演算部4と、これらの切換部5と、目標エンジントルクからの目標スロットル開度演算部6とを有している。
【0011】
通常制御用の目標エンジントルク演算部3は、アクセル開度センサ7により検出されるアクセル開度(アクセルペダル踏込み量)に基づいて目標エンジントルクを演算する。
【0012】
定速走行制御用の目標エンジントルク演算部4は、定速走行制御中に車速センサ8により検出される車速が目標車速に一致するように目標エンジントルクを増減設定する。
【0013】
切換部5は、通常制御を行うか、定速走行制御を行うかを判定し、判定結果に従って演算部3又は4からの目標エンジントルクを選択するように切換える。
目標スロットル開度演算部6は、切換部5からの目標エンジントルクに基づいて目標スロットル開度を演算し、これに対応する駆動信号を出力して、電制スロットル弁1の開度を制御する。
【0014】
ここで、ECU2には、定速走行条件(定速走行開始条件及び定速走行解除条件)の判定のため、アクセル開度センサ7、車速センサ8の他、ブレーキ操作の有無を検出するブレーキスイッチ9、変速機のシフト位置を検出するシフト位置センサ10、ステアリングの操舵角を検出する操舵角センサ11、更に、運転者により操作される定速走行用のメインスイッチ12から信号が入力されている。また、ECU2からの出力で定速走行制御時に点灯するようにインジケータランプ(クルーズランプ)13が接続されている。
【0015】
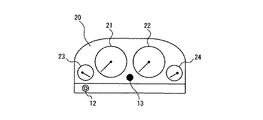
尚、定速走行用のメインスイッチ12及びインジケータランプ13は、図2に示すように、運転席の計器パネル20上に、速度計21、回転計22、燃料計23、水温計24などと共に、設置されている。
【0016】
図3はECU2において実行する定速走行制御のフローチャートである。
S1では、定速走行用のメインスイッチがONになっている(運転者により定速走行が許可されている)か否かを判定する。メインスイッチがONになっていれば、S2へ進む。
【0017】
S2では、車速センサより車速を読込み、車速が定速走行許可車速(例えば40km/h)以上か否かを判定する。車速が40km/h以上であれば、S3へ進む。
【0018】
S3では、車速が高車速域、例えば80km/h以上か否かを判定する。
車速が40km/h以上であるが、80km/h未満(低車速域)であれば、市街地走行と判定して、S4へ進み、市街地走行での定速走行開始条件か否か、すなわち、略一定の車速で第1の設定時間(例えば1.5秒)経過したか否かを判定する。
【0019】
車速が80km/h以上(高車速域)であれば、高速走行(高速道路)と判定して、S5へ進み、高速走行での定速走行開始条件か否か、すなわち、略一定の車速で前記第1の設定時間より長く設定した第2の設定時間(例えば3.0秒)経過したか否かを判定する。
【0020】
S4での判定でYESの場合、すなわち、40km/h以上、80km/h未満での略一定の車速で1.5秒経過した場合は、市街地走行での定速走行開始条件成立と判定し、S6で定速走行解除条件の判定に用いるアクセル開度の設定範囲(許容範囲;記憶開度±E)を定める誤差分Eを比較的大(例えば10deg)に設定した後、S8へ進む。
【0021】
S5での判定でYESの場合、すなわち、80km/h以上での略一定の車速で3.0秒経過した場合は、高速走行での定速走行開始条件成立と判定し、S7で定速走行解除条件の判定に用いるアクセル開度の設定範囲(許容範囲;記憶開度±E)を定める誤差分Eを比較的小(例えば5deg)に設定した後、S8へ進む。
【0022】
S8では、現時点(定速走行開始条件成立時)のアクセル開度をAmとして記憶する。これにより、定速走行解除条件の判定に用いるアクセル開度の設定範囲(Am±E)が定まる。
【0023】
そして、S9では、現時点(定速走行開始条件成立時)の車速、言い換えれば、略一定の車速で設定時間経過と判定したときの略一定の車速を、定速走行制御の目標車速として設定する。
【0024】
そして、S10では、定速走行制御に切換える。すなわち、電制スロットル弁制御用の目標エンジントルクとして、定速走行制御用の目標エンジントルクを使用するように切換える。
【0025】
そして、S11では、車速センサにより検出される車速と前記目標車速とを比較し、目標車速より低い場合は目標エンジントルクを増大させ、逆に目標車速より高い場合は目標エンジントルクを減少させ、かかる目標エンジントルクの設定により目標車速を得るように、定速走行制御を行う。
【0026】
定速走行制御中は、S12で、定速走行解除条件として、アクセル開度が定速走行開始条件成立時の記憶開度Amに対する設定範囲(Am±E)外となったか否か、すなわち、アクセル開度>Am+E、又は、アクセル開度<Am−Eとなったか否かを判定する。
【0027】
S12でNOの場合、すなわちアクセル開度が記憶開度Amに対する許容範囲(Am±E)内の場合は、更に他の定速走行解除条件の判定のため、S13へ進む。
【0028】
S13では、ブレーキスイッチの信号よりブレーキON(ブレーキ操作有り)か否かを判定し、NOであればS14へ進む。
S14では、シフト位置センサの信号より変速機のシフト位置が変化したか否かを判定し、NOであればS15へ進む。
【0029】
S15では、操舵角センサにより検出されるステアリングの操舵角を読込み、操舵角が所定値(例えば15deg)以上か否かを判定し、NOであればS16へ進む。
【0030】
S16では、定速走行用のメインスイッチがOFFになったか否かを判定し、NOであれば、S11へ戻る。
すなわち、S12〜S16の判定でいずれもNOの場合は、定速走行解除条件が成立しないので、S11へ戻って、定速走行制御を続行する。
【0031】
S12でYESの場合、すなわち、定速走行制御中にアクセルペダルが踏み増しされるか、足が離されるなどして、アクセル開度が定速走行開始条件成立時の記憶開度Amに対する設定範囲(Am±E)外となった場合、すなわち、アクセル開度>Am+E、又は、アクセル開度<Am−Eとなった場合は、定速走行解除条件成立として、S17へ進む。
【0032】
S17では、踏み増しの場合か否か、すなわち、アクセル開度>Am+Eか否かを判定する。
踏み増しでない場合、すなわち、アクセル開度<Am−Eの場合は、S19へ進み、定速走行制御を終了させて、通常制御に復帰させる。すなわち、アクセル開度に基づいて演算される目標エンジントルクを使用して、電制スロットル弁を制御するように切換える。
【0033】
これに対し、踏み増しの場合は、S18の処理を経て、S19へ進む。踏み増しの場合、図4に示すように、アクセル開度が誤差分E変化してから、通常制御に移行することになり、通常制御での目標エンジントルクをそのまま使用すると、図示点線のように大きなトルク段差が発生する。よって、S18にて、目標エンジントルクを10Nm/100ms程度の割合で徐々に増加させ、通常制御での目標エンジントルクに達した後に、通常制御に移行する。
【0034】
また、S13〜S16のいずれかでYESの場合、すなわちブレーキONの場合、又は、シフト位置変化有りの場合、又は、操舵角≧15degの場合、又は、メインスイッチOFFの場合は、定速走行解除条件成立として、S19へ進み、定速走行制御を終了させて、通常制御に復帰させる。
【0035】
ここで、S1〜S5の部分が定速走行開始条件判定手段に相当し、S8の部分がアクセル開度記憶手段に相当し、S12〜S16(及びS6、S7)の部分が定速走行解除条件判定手段に相当し、S17、S18の部分がエンジン出力制限手段に相当する。
【0036】
本実施形態によれば、車両が略一定の車速を保持した状態で設定時間経過した時に、定速走行を開始させるため、簡易に、かつ頻繁に定速走行を行うことができる。また、定速走行中もアクセルペダルを踏んでいて、アクセルペダルを踏みますか、足を離すことで、定速走行を解除するため、急なアクセル操作、減速操作(及びブレーキ操作)にも対応することができる。また、定速走行中に無駄なアクセル操作をしても、設定範囲内であれば、無駄なアクセル操作に影響されないので、実用燃費の向上を図ることができる。また、定速走行を行う場合、定速走行開始時も定速走行中もアクセル操作だけなので、定速走行用のメインスイッチを別にすれば、複雑な専用の定速走行用コントローラが不要となり、ECUに定速走行制御の機能を持たせることが簡単となる。
【0037】
また、本実施形態によれば、ブレーキ操作時や、シフト位置の変化時にも、定速走行を解除させることにより、運転者の意図にすぐさま対応できる。
また、本実施形態によれば、操舵角が所定値以上の時(すなわちステアリングをある一定以上切り込んだ時)にも、定速走行を解除させることにより、急カーブにおける急な運転操作にも対応可能となる。
【0038】
また、本実施形態によれば、定速走行用のメインスイッチがON操作されていることを前提条件として、定速走行開始条件を成立させる一方、定速走行中に、メインスイッチがOFF操作された時に、定速走行を解除させることにより、運転者の意思を確実に反映できる。
【0039】
また、本実施形態によれば、アクセル開度の踏み増しによる定速走行解除時にエンジン出力(目標エンジントルク)を徐々に増大させることにより、トルク段差の発生を防止して、運転性を向上できる。
【0040】
また、本実施形態によれば、定速走行開始条件判定のための設定時間を、車速に応じて変化させ、高車速側で短く設定することにより、市街地走行時に比べて定速走行の要求の高い高速走行時に、定速走行により入り易くして、実用性を高めることができる。
【0041】
また、本実施形態によれば、定速走行解除条件判定のためのアクセル開度の設定範囲を、定速走行開始条件成立時の車速に応じて変化させ、高車速側で大きくすることにより、市街地走行時に比べて定速走行の要求の高い高速走行時に、定速走行をより持続させ易くして、実用性を高めることができる。
【0042】
また、本実施形態によれば、定速走行中に点灯して定速走行中であることを運転者に報知するインジケータランプ13を設けたことにより、自動的に定速走行に移行しても、これを運転者に確実に認識させることができる。
【図面の簡単な説明】
【図1】本発明の一実施形態を示す車両用エンジンの電制スロットル弁の制御システム図
【図2】車両の運転席の計器パネルの概略図
【図3】定速走行制御のフローチャート
【図4】アクセルペダル踏み増しによる定速走行解除時の目標エンジントルク設定方法を示す図
【符号の説明】
1 電制スロットル弁
2 ECU
3 通常制御時の目標エンジントルク演算部
4 定速走行制御用の目標エンジントルク演算部
5 切換部
6 目標スロットル開度演算部
7 アクセル開度センサ
8 車速センサ
9 ブレーキスイッチ
10 シフト位置センサ
11 操舵角センサ
12 定速走行用のメインスイッチ
13 インジケータランプ
【発明の属する技術分野】
本発明は、車両用定速走行装置に関する。
【0002】
【従来の技術】
従来、簡易型の定速走行装置として、特許文献1に記載のものがある。
これは、車両が略一定の車速を保持した状態で所定時間経過すると、略一定の車速にて定速走行すべくエンジンの出力を制御し、定速走行制御中にアクセルペダルが踏み込まれると、定速走行を解除するようにしている。
【0003】
【特許文献1】特開2000−6682号公報
【0004】
【発明が解決しようとする課題】
しかしながら、上記の定速走行装置では、車両が略一定の車速を保持した状態で所定時間経過すると、定速走行に入るが、この際、アクセルペダルから一旦足を離し、解除する場合に、再びアクセルペダルへ足を戻す必要があり、誤操作を引き起こしかねない。また、アクセルペダルから足を離しているので、急なアクセル操作を瞬時に行うことが困難であるばかりか、足の置き所がなくて急なブレーキ操作もまごつくことがあった。
【0005】
本発明は、このような従来の問題点に鑑み、簡易な操作で定速走行を実現できると共に、急なアクセル操作、ブレーキ操作にも対応できる定速走行装置を提供することを目的とする。
【0006】
【課題を解決するための手段】
このため、本発明では、車両が略一定の車速を保持した状態で設定時間経過した時に、定速走行を開始させる一方、このときのアクセル開度を記憶しておき、その後、アクセル開度が前記記憶開度に対する設定範囲外となった時に、定速走行を解除させる構成とする。
【0007】
【発明の効果】
本発明によれば、略一定の車速での経過時間により定速走行を開始させ、定速走行中もアクセルペダルを踏んでいて、アクセルペダルを踏み増すか、足を離すことで、定速走行を解除するため、アクセルペダルのみの簡易な操作で定速走行を実現できる一方、急なアクセル操作、ブレーキ操作にも対応できる。
【0008】
【発明の実施の形態】
以下に本発明の実施の形態を図面に基づいて説明する。
図1は本発明の一実施形態を示す車両用エンジンの電制スロットル弁の制御システム図である。
【0009】
電制スロットル弁1は、エンジン吸気系にて吸入空気量を制御することによりエンジン出力を制御するもので、モータ等のアクチュエータを含んで構成され、エンジンコントロールユニット(以下ECUという)2からの駆動信号により駆動される。
【0010】
ECU2は、機能的に見て、通常制御用の目標エンジントルク演算部3と、定速走行制御用の目標エンジントルク演算部4と、これらの切換部5と、目標エンジントルクからの目標スロットル開度演算部6とを有している。
【0011】
通常制御用の目標エンジントルク演算部3は、アクセル開度センサ7により検出されるアクセル開度(アクセルペダル踏込み量)に基づいて目標エンジントルクを演算する。
【0012】
定速走行制御用の目標エンジントルク演算部4は、定速走行制御中に車速センサ8により検出される車速が目標車速に一致するように目標エンジントルクを増減設定する。
【0013】
切換部5は、通常制御を行うか、定速走行制御を行うかを判定し、判定結果に従って演算部3又は4からの目標エンジントルクを選択するように切換える。
目標スロットル開度演算部6は、切換部5からの目標エンジントルクに基づいて目標スロットル開度を演算し、これに対応する駆動信号を出力して、電制スロットル弁1の開度を制御する。
【0014】
ここで、ECU2には、定速走行条件(定速走行開始条件及び定速走行解除条件)の判定のため、アクセル開度センサ7、車速センサ8の他、ブレーキ操作の有無を検出するブレーキスイッチ9、変速機のシフト位置を検出するシフト位置センサ10、ステアリングの操舵角を検出する操舵角センサ11、更に、運転者により操作される定速走行用のメインスイッチ12から信号が入力されている。また、ECU2からの出力で定速走行制御時に点灯するようにインジケータランプ(クルーズランプ)13が接続されている。
【0015】
尚、定速走行用のメインスイッチ12及びインジケータランプ13は、図2に示すように、運転席の計器パネル20上に、速度計21、回転計22、燃料計23、水温計24などと共に、設置されている。
【0016】
図3はECU2において実行する定速走行制御のフローチャートである。
S1では、定速走行用のメインスイッチがONになっている(運転者により定速走行が許可されている)か否かを判定する。メインスイッチがONになっていれば、S2へ進む。
【0017】
S2では、車速センサより車速を読込み、車速が定速走行許可車速(例えば40km/h)以上か否かを判定する。車速が40km/h以上であれば、S3へ進む。
【0018】
S3では、車速が高車速域、例えば80km/h以上か否かを判定する。
車速が40km/h以上であるが、80km/h未満(低車速域)であれば、市街地走行と判定して、S4へ進み、市街地走行での定速走行開始条件か否か、すなわち、略一定の車速で第1の設定時間(例えば1.5秒)経過したか否かを判定する。
【0019】
車速が80km/h以上(高車速域)であれば、高速走行(高速道路)と判定して、S5へ進み、高速走行での定速走行開始条件か否か、すなわち、略一定の車速で前記第1の設定時間より長く設定した第2の設定時間(例えば3.0秒)経過したか否かを判定する。
【0020】
S4での判定でYESの場合、すなわち、40km/h以上、80km/h未満での略一定の車速で1.5秒経過した場合は、市街地走行での定速走行開始条件成立と判定し、S6で定速走行解除条件の判定に用いるアクセル開度の設定範囲(許容範囲;記憶開度±E)を定める誤差分Eを比較的大(例えば10deg)に設定した後、S8へ進む。
【0021】
S5での判定でYESの場合、すなわち、80km/h以上での略一定の車速で3.0秒経過した場合は、高速走行での定速走行開始条件成立と判定し、S7で定速走行解除条件の判定に用いるアクセル開度の設定範囲(許容範囲;記憶開度±E)を定める誤差分Eを比較的小(例えば5deg)に設定した後、S8へ進む。
【0022】
S8では、現時点(定速走行開始条件成立時)のアクセル開度をAmとして記憶する。これにより、定速走行解除条件の判定に用いるアクセル開度の設定範囲(Am±E)が定まる。
【0023】
そして、S9では、現時点(定速走行開始条件成立時)の車速、言い換えれば、略一定の車速で設定時間経過と判定したときの略一定の車速を、定速走行制御の目標車速として設定する。
【0024】
そして、S10では、定速走行制御に切換える。すなわち、電制スロットル弁制御用の目標エンジントルクとして、定速走行制御用の目標エンジントルクを使用するように切換える。
【0025】
そして、S11では、車速センサにより検出される車速と前記目標車速とを比較し、目標車速より低い場合は目標エンジントルクを増大させ、逆に目標車速より高い場合は目標エンジントルクを減少させ、かかる目標エンジントルクの設定により目標車速を得るように、定速走行制御を行う。
【0026】
定速走行制御中は、S12で、定速走行解除条件として、アクセル開度が定速走行開始条件成立時の記憶開度Amに対する設定範囲(Am±E)外となったか否か、すなわち、アクセル開度>Am+E、又は、アクセル開度<Am−Eとなったか否かを判定する。
【0027】
S12でNOの場合、すなわちアクセル開度が記憶開度Amに対する許容範囲(Am±E)内の場合は、更に他の定速走行解除条件の判定のため、S13へ進む。
【0028】
S13では、ブレーキスイッチの信号よりブレーキON(ブレーキ操作有り)か否かを判定し、NOであればS14へ進む。
S14では、シフト位置センサの信号より変速機のシフト位置が変化したか否かを判定し、NOであればS15へ進む。
【0029】
S15では、操舵角センサにより検出されるステアリングの操舵角を読込み、操舵角が所定値(例えば15deg)以上か否かを判定し、NOであればS16へ進む。
【0030】
S16では、定速走行用のメインスイッチがOFFになったか否かを判定し、NOであれば、S11へ戻る。
すなわち、S12〜S16の判定でいずれもNOの場合は、定速走行解除条件が成立しないので、S11へ戻って、定速走行制御を続行する。
【0031】
S12でYESの場合、すなわち、定速走行制御中にアクセルペダルが踏み増しされるか、足が離されるなどして、アクセル開度が定速走行開始条件成立時の記憶開度Amに対する設定範囲(Am±E)外となった場合、すなわち、アクセル開度>Am+E、又は、アクセル開度<Am−Eとなった場合は、定速走行解除条件成立として、S17へ進む。
【0032】
S17では、踏み増しの場合か否か、すなわち、アクセル開度>Am+Eか否かを判定する。
踏み増しでない場合、すなわち、アクセル開度<Am−Eの場合は、S19へ進み、定速走行制御を終了させて、通常制御に復帰させる。すなわち、アクセル開度に基づいて演算される目標エンジントルクを使用して、電制スロットル弁を制御するように切換える。
【0033】
これに対し、踏み増しの場合は、S18の処理を経て、S19へ進む。踏み増しの場合、図4に示すように、アクセル開度が誤差分E変化してから、通常制御に移行することになり、通常制御での目標エンジントルクをそのまま使用すると、図示点線のように大きなトルク段差が発生する。よって、S18にて、目標エンジントルクを10Nm/100ms程度の割合で徐々に増加させ、通常制御での目標エンジントルクに達した後に、通常制御に移行する。
【0034】
また、S13〜S16のいずれかでYESの場合、すなわちブレーキONの場合、又は、シフト位置変化有りの場合、又は、操舵角≧15degの場合、又は、メインスイッチOFFの場合は、定速走行解除条件成立として、S19へ進み、定速走行制御を終了させて、通常制御に復帰させる。
【0035】
ここで、S1〜S5の部分が定速走行開始条件判定手段に相当し、S8の部分がアクセル開度記憶手段に相当し、S12〜S16(及びS6、S7)の部分が定速走行解除条件判定手段に相当し、S17、S18の部分がエンジン出力制限手段に相当する。
【0036】
本実施形態によれば、車両が略一定の車速を保持した状態で設定時間経過した時に、定速走行を開始させるため、簡易に、かつ頻繁に定速走行を行うことができる。また、定速走行中もアクセルペダルを踏んでいて、アクセルペダルを踏みますか、足を離すことで、定速走行を解除するため、急なアクセル操作、減速操作(及びブレーキ操作)にも対応することができる。また、定速走行中に無駄なアクセル操作をしても、設定範囲内であれば、無駄なアクセル操作に影響されないので、実用燃費の向上を図ることができる。また、定速走行を行う場合、定速走行開始時も定速走行中もアクセル操作だけなので、定速走行用のメインスイッチを別にすれば、複雑な専用の定速走行用コントローラが不要となり、ECUに定速走行制御の機能を持たせることが簡単となる。
【0037】
また、本実施形態によれば、ブレーキ操作時や、シフト位置の変化時にも、定速走行を解除させることにより、運転者の意図にすぐさま対応できる。
また、本実施形態によれば、操舵角が所定値以上の時(すなわちステアリングをある一定以上切り込んだ時)にも、定速走行を解除させることにより、急カーブにおける急な運転操作にも対応可能となる。
【0038】
また、本実施形態によれば、定速走行用のメインスイッチがON操作されていることを前提条件として、定速走行開始条件を成立させる一方、定速走行中に、メインスイッチがOFF操作された時に、定速走行を解除させることにより、運転者の意思を確実に反映できる。
【0039】
また、本実施形態によれば、アクセル開度の踏み増しによる定速走行解除時にエンジン出力(目標エンジントルク)を徐々に増大させることにより、トルク段差の発生を防止して、運転性を向上できる。
【0040】
また、本実施形態によれば、定速走行開始条件判定のための設定時間を、車速に応じて変化させ、高車速側で短く設定することにより、市街地走行時に比べて定速走行の要求の高い高速走行時に、定速走行により入り易くして、実用性を高めることができる。
【0041】
また、本実施形態によれば、定速走行解除条件判定のためのアクセル開度の設定範囲を、定速走行開始条件成立時の車速に応じて変化させ、高車速側で大きくすることにより、市街地走行時に比べて定速走行の要求の高い高速走行時に、定速走行をより持続させ易くして、実用性を高めることができる。
【0042】
また、本実施形態によれば、定速走行中に点灯して定速走行中であることを運転者に報知するインジケータランプ13を設けたことにより、自動的に定速走行に移行しても、これを運転者に確実に認識させることができる。
【図面の簡単な説明】
【図1】本発明の一実施形態を示す車両用エンジンの電制スロットル弁の制御システム図
【図2】車両の運転席の計器パネルの概略図
【図3】定速走行制御のフローチャート
【図4】アクセルペダル踏み増しによる定速走行解除時の目標エンジントルク設定方法を示す図
【符号の説明】
1 電制スロットル弁
2 ECU
3 通常制御時の目標エンジントルク演算部
4 定速走行制御用の目標エンジントルク演算部
5 切換部
6 目標スロットル開度演算部
7 アクセル開度センサ
8 車速センサ
9 ブレーキスイッチ
10 シフト位置センサ
11 操舵角センサ
12 定速走行用のメインスイッチ
13 インジケータランプ
Claims (9)
- 所定の定速走行開始条件成立から、所定の定速走行解除条件成立まで、前記定速走行開始条件成立時の車速にて定速走行すべくエンジン出力を制御する車両用定速走行装置であって、
車両が略一定の車速を保持した状態で設定時間経過した時に、前記定速走行開始条件を成立させる定速走行開始条件判定手段と、
前記定速走行開始条件成立時に、そのときのアクセル開度を記憶するアクセル開度記憶手段と、
アクセル開度が前記記憶開度に対する設定範囲外となった時に、前記定速走行解除条件を成立させる定速走行解除条件判定手段と、
を含んで構成される車両用定速走行装置。 - 前記定速走行解除条件判定手段は、アクセル開度が前記記憶開度に対する設定範囲外となった時の他、少なくともブレーキ操作時に、前記定速走行解除条件を成立させることを特徴とする請求項1記載の車両用定速走行装置。
- 前記定速走行解除条件判定手段は、アクセル開度が前記記憶開度に対する設定範囲外となった時の他、少なくとも変速機のシフト位置の変化時に、前記定速走行解除条件を成立させることを特徴とする請求項1又は請求項2記載の車両用定速走行装置。
- 前記定速走行解除条件判定手段は、アクセル開度が前記記憶開度に対する設定範囲外となった時の他、少なくともステアリングの操舵角が所定値以上の時に、前記定速走行解除条件を成立させることを特徴とする請求項1〜請求項3のいずれか1つに記載の車両用定速走行装置。
- 前記定速走行開始条件判定手段は、定速走行用のメインスイッチがON操作されていることを前提条件として、車両が略一定の車速を保持した状態で設定時間経過した時に、前記定速走行開始条件を成立させるものであり、
前記定速走行解除条件判定手段は、アクセル開度が前記記憶開度に対する設定範囲外となった時の他、少なくとも前記メインスイッチがOFF操作された時に、前記定速走行解除条件を成立させることを特徴とする請求項1〜請求項4のいずれか1つに記載の車両用定速走行装置。 - アクセルペダルの踏み増しにより、アクセル開度が前記記憶開度に対する設定範囲外となって、前記定速走行解除条件が成立した時に、エンジン出力を徐々に増大させるエンジン出力制限手段を設けたことを特徴とする請求項1〜請求項5のいずれか1つに記載の車両用定速走行装置。
- 前記定速走行開始条件判定手段は、前記設定時間を、車速に応じて変化させ、高車速側で短く設定することを特徴とする請求項1〜請求項6のいずれか1つに記載の車両用定速走行装置。
- 前記定速走行解除条件判定手段は、前記設定範囲を、前記定速走行開始条件成立時の車速に応じて変化させ、高車速側で大きく設定することを特徴とする請求項1〜請求項7のいずれか1つに記載の車両用定速走行装置。
- 定速走行中に点灯して定速走行中であることを運転者に報知するインジケータランプを設けたことを特徴とする請求項1〜請求項8のいずれか1つに記載の車両用定速走行装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002348433A JP2004182010A (ja) | 2002-11-29 | 2002-11-29 | 車両用定速走行装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002348433A JP2004182010A (ja) | 2002-11-29 | 2002-11-29 | 車両用定速走行装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004182010A true JP2004182010A (ja) | 2004-07-02 |
Family
ID=32751346
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002348433A Pending JP2004182010A (ja) | 2002-11-29 | 2002-11-29 | 車両用定速走行装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004182010A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009012611A (ja) * | 2007-07-04 | 2009-01-22 | Toyota Motor Corp | 車両の制御装置 |
| CN104379427A (zh) * | 2012-06-11 | 2015-02-25 | 日立汽车系统株式会社 | 车辆的行驶控制装置 |
| JP2017130198A (ja) * | 2016-01-12 | 2017-07-27 | トヨタ モーター エンジニアリング アンド マニュファクチャリング ノース アメリカ,インコーポレイティド | 拡張された前方衝突警告を提供する装置及び方法 |
-
2002
- 2002-11-29 JP JP2002348433A patent/JP2004182010A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009012611A (ja) * | 2007-07-04 | 2009-01-22 | Toyota Motor Corp | 車両の制御装置 |
| CN104379427A (zh) * | 2012-06-11 | 2015-02-25 | 日立汽车系统株式会社 | 车辆的行驶控制装置 |
| JP2017130198A (ja) * | 2016-01-12 | 2017-07-27 | トヨタ モーター エンジニアリング アンド マニュファクチャリング ノース アメリカ,インコーポレイティド | 拡張された前方衝突警告を提供する装置及び方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6358180B1 (en) | Engine control system and method | |
| JP3799837B2 (ja) | クルーズ制御装置用の報知装置 | |
| US8712661B2 (en) | Device to control force required to depress accelerator pedal | |
| JP4864655B2 (ja) | 走行制御装置 | |
| JP2000054860A (ja) | 自動走行制御装置及びペダル反力調整器並びに記録媒体 | |
| JP2007153317A (ja) | 車両走行制御装置及び車両走行制御方法 | |
| JPH08223708A (ja) | 電気自動車の定速走行制御装置 | |
| JP2008111430A (ja) | 制御システムおよびそれを備えた車両 | |
| JP2012180013A (ja) | クリープ車速制御装置 | |
| JPH08118993A (ja) | 定速走行制御時のモータロック検出装置 | |
| JP3204840B2 (ja) | 車両用定速走行制御装置 | |
| JP2004182010A (ja) | 車両用定速走行装置 | |
| JP2011089506A (ja) | エンジン制御装置 | |
| JP5292965B2 (ja) | 走行制御装置 | |
| JPH10246321A (ja) | 車両の変速装置 | |
| KR20220004853A (ko) | 수동 변속기 차량의 크루즈 컨트롤 제어 방법 및 이에 적용되는 크루즈 컨트롤 제어 장치 | |
| JP2010274750A (ja) | 車両の制御装置 | |
| JP2008290630A (ja) | アクセルペダル反力制御装置 | |
| JP3929870B2 (ja) | 自動変速制御装置 | |
| JP3666345B2 (ja) | 自動走行制御装置 | |
| JP3508432B2 (ja) | 車両の走行制御装置 | |
| JP2000142168A (ja) | 車両走行制御装置 | |
| KR100308970B1 (ko) | 자동차 정속 주행 시스템의 제어 방법 | |
| JPH08118996A (ja) | 車両の速度制御装置 | |
| JP3221379B2 (ja) | 車間距離制御装置 |