JP2004121569A - 歩行支援装置 - Google Patents
歩行支援装置 Download PDFInfo
- Publication number
- JP2004121569A JP2004121569A JP2002290577A JP2002290577A JP2004121569A JP 2004121569 A JP2004121569 A JP 2004121569A JP 2002290577 A JP2002290577 A JP 2002290577A JP 2002290577 A JP2002290577 A JP 2002290577A JP 2004121569 A JP2004121569 A JP 2004121569A
- Authority
- JP
- Japan
- Prior art keywords
- user
- arm
- walking
- support device
- knee
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Rehabilitation Tools (AREA)
Abstract
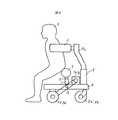
【解決手段】歩行支援装置1は、台板16と、力センサを内蔵した略コの字形のサポータ3と、このサポータの上下位置を変更可能な昇降手段4と、駆動モータ7a、7bの動力が伝動ベルト6a、6bを介して伝達される駆動車輪5a、5bと、従動車輪8a、8bとを有する。使用者2は、サポータの内側でサポータに掴まって歩行するときに、サポータの高さを昇降手段で調整する。台板に取付けた伸縮手段11にアーム10が、アームの先端に力センサを内蔵する膝当て9がそれぞれ取り付けられている。使用者は立上がるときに、両膝を膝当てに当てる。膝当てに使用者の膝が当るよう伸縮手段を用いてアーム長を変える。歩行時にアームが歩行を妨げないよう、アームを進行方向に旋回させる。
【選択図】 図1
Description
【発明の属する技術分野】
本発明は、使用者の歩行を支援する歩行支援装置に関する。
【0002】
【従来の技術】
筋力等の身体機能が低下した高齢者や障害者の身体活動を支援する装置の例が、特許文献1に記載されている。この公報に記載の姿勢変換装置は、自力で立上がることが困難な患者の立上がりを補助するために、膝パッドで患者の膝を支えるとともに胸パッドで患者の胸を支えている。これにより、患者を前傾姿勢にして立上がらせている。その際、上半身と臀部を支持するサポート部材やベルト付きの脇パッドを用いて、患者の胸を胸パッドに押し当てている。
【特許文献1】
特開平9−570号公報(第4〜11頁、第1図)
【0003】
【発明が解決しようとする課題】
自分で立位姿勢を保持できる程度の筋力を有する患者でも、椅子などに座った状態から立上がるときには、足に加わる負担が大きい。そこで、他人等が患者の膝を支持して、立ち上がりを容易にすることが上記特許文献1等で提案されている。しかしながらこの特許文献1では、患者の身体をサポート部材やベルト付きの脇パッドを用いて支持しているので、患者は身体を自由に動かせないという不具合がある。また、膝パッドが常に患者の足の前に位置するので、歩行するのに膝パッドが妨げとなり、立上がった患者がすぐに歩行することが困難であった。
【0004】
本発明の目的は、筋力等の身体機能が低下した高齢者や障害者の負担を軽減して座った状態からの立上がりと立上がった後の歩行を歩行支援装置が支援できるようにするこにある。
【0005】
【課題を解決するための手段】
上記目的を達成する本発明の特徴は、使用者の身体を支える支持手段と、使用者の歩行を補助する移動手段とを有する歩行支援装置において、移動手段を制動する制動装置と、膝当てを有するアームと、このアームの長さを可変する伸縮手段と、アームを旋回させる旋回手段と、伸縮手段と旋回手段を制御する制御手段とを設けたものである。
【0006】
そしてこの特徴において、アームは使用者の膝から膝当てに作用する力を検出する力検出手段を有し、制御手段はこの力検出手段が検出した力の大きさに応じてアームの位置を制御するのが望ましく、アームの長さと旋回角度を変更させる操作手段を有するこようにしてもよい。また、制御装置は操作手段からの指令に基いて、使用者が歩行中はアームを退避位置に位置付け、使用者が起立するときは膝当てを使用者の座る位置に移動させることが望ましい。そして、記膝当てが円筒状であるのがよい。
【0007】
【発明の実施の形態】
以下、本発明に係る歩行支援装置の一実施例を、図面を用いて説明する。図1は、歩行支援装置の側面図であり、図2はその上面図である。歩行支援装置1は筋力等の身体機能が低下した使用者2の歩行を支援する装置である。台板16の上面には、詳細を後述するステー4aが、昇降手段4を介して取付けられている。台板16の下面には、一対の駆動車輪5a,5bが使用者2側に、一対の従動車輪8a,8bが反使用者2側にそれぞれ取付けられている。ステー4aの上端部近傍には、力センサを内蔵するサポータ3が取付けられている。
【0008】
図2に示すように、サポータ3は略コの字形をしている。使用者2はコの字の内側に居てサポータ3に掴まって歩行する。使用者2の歩行姿勢に合わせて、サポータ3の高さを変更する。高さの変更には、昇降手段4を用いる。左右の駆動車輪5a、5bは、それぞれ伝動ベルト6a、6bを介して駆動モータ7a、7bに接続されている。従動車輪8a、8bは、進行方向が回転自在に台板16に取り付けられている。
【0009】
昇降手段4には、ボールスクリューを用いた直動アクチュエータを用いている。ボールスクリューのボールねじの回転を制御して、直動アクチュエータに接続したサポータ3の高さを変更する。ボールねじの回転を停止して、サポータ3の高さを固定する。
【0010】
力センサを内蔵した円筒状の膝当て9が、アーム10に取り付けられている。使用者2は、立上がるときに両膝を膝当て9に当てる。膝当て9は、柔軟性のある素材のものが望ましい。膝当て9が使用者2の膝に当るように、伸縮手段11を用いてアーム10の長さを変更する。また、旋回手段12を用いてアーム10を旋回させ、使用者2の膝に膝当て9を位置させる。伸縮手段11には、ボールスクリューを有する直動アクチュエータを用いている。ボールスクリューのボールねじの回転を制御して直動アクチュエータに接続したアーム10の長さを変更する。ボールねじの回転を停止させればアーム10の長さを固定できる。
【0011】
旋回手段12には、ブレーキ付きの回転モータを用いている。モータの回転を制御してアーム10の旋回方向位置を変更する。モータを回転させる時にはブレーキを解除する。モータを停止させる時にはブレーキを作動させてアーム10の旋回方向位置を固定する。このように、伸縮手段11と旋回手段12とを用いることにより、アーム10を設定した位置で、使用者2から膝当て9に加わる力を確実に支えることができる。
【0012】
図1に示した実施例の歩行支援装置の上面図を、図2に示す。駆動車輪5a、5bを制動するブレーキ13a、13bが、駆動モータ7a、7bに取付けられている。駆動モータ7a、7bには、この駆動モータ7a、7bの回転を検出する回転センサ14a、14bが軸端部に取付けられている。コントローラ15は、各力センサを用いて計測するとともに、昇降手段4や駆動モータ7a、bを制御する。また、伸縮手段11と旋回手段12を用いてアーム10を制御する。
【0013】
図2に示した歩行支援装置が有する操作手段20の詳細を、図3に示す。操作手段20は、歩行支援装置本体のコントローラ15に有線または無線で接続されている。使用者2は、動作ボタン21を用いて動作を選択する。操作手段20には、サポータ3の位置を操作するためのサポータ操作ボタン22と、アーム10の位置を操作するためのアーム操作ボタン23とを備えている。使用者2が操作手段の各ボタンを操作すると、コントローラ15が歩行支援装置1とサポータ3とアーム10を制御する。
【0014】
このように構成した歩行支援装置の動作を、図4の処理フローを用いて説明する。使用者2が、動作ボタン21中の起立ボタンを選択すると、コントローラ15はブレーキ13a、13bを制御して駆動車輪5a、5bを制動する。そして、膝当て9が使用者2の膝に当るようにアーム10を所定の位置に移動させ、その位置で位置固定する(ステップ100)。
【0015】
膝当て9が使用者2の膝に当ると、使用者2はサポータ3を掴んで立上がる(ステップ101)。このとき、コントローラ15は、膝当て9に内蔵した力センサで使用者2の膝が膝当て9を押す力を計測する。使用者2が立上がってしまえば、使用者2の膝を膝当て9で支持する必要がなくなる。使用者2が立ち上がった状態では膝当て9に作用する力が小さくなる。そこで、膝当てに作用する力が所定の値以下になったら使用者2が立上がったものと判断し、アーム10位置の固定を解除しアーム10を昇降手段4側の所定の位置に移動させる。所定位置に到達したら、アーム10の位置を固定する(ステップ102)。
【0016】
アーム10が昇降手段4側に移動した状態を、図5に示す。アーム10を昇降手段4側に旋回させたので、アーム10が使用者2の歩行を妨げるのを回避できる。このため、使用者2は立上がったらすぐにサポータ3の内側に入り、サポータ3に掴まって歩行することができる。
【0017】
使用者2は、立上がって操作手段20の動作ボタン21から歩行を選択する。そして、サポータ3に掴まって歩行を開始する(ステップ103)。このとき、コントローラ15は、ブレーキ13a、13bを制御して駆動車輪5a、5bの制動を解除する。それとともに、サポータ3に内蔵した力センサに使用者2から加わる力を計測する。そして、力が作用する方向に歩行支援装置1を移動させるために、駆動車輪5a、5bを駆動する駆動モータ7a、7bを制御する。
【0018】
歩行中に使用者2がその場に静止する場合は、操作手段20中の動作ボタン21から停止ボタンを選択する。停止ボタンが押されると、コントローラ15はブレーキ13a、13bを制御して駆動車輪5a、5bを制動する。使用者2がその場で少し休憩する場合は、動作ボタン21中の休憩ボタンを選択する(ステップ104)。休憩ボタンが押されると、コントローラ15はブレーキ13a、13bを制御して駆動車輪5a、5bを制動する。そして、膝当て9に使用者2が座られるようにアーム10を所定の位置に移動させる。そしてその所定位置で、アーム10の位置を固定する(ステップ105)。使用者2が座られる位置に膝当て9が移動したら、使用者2は膝当て9に座って休憩できる(ステップ106)。
【0019】
使用者2が膝当て9に着座した状態を、図6に示す。使用者2が歩行中に疲れて歩行支援装置1に着座するときは、歩行支援装置1に後ろ向きに着座する。これにより、足を自由に伸ばすことができる。また、その場での立ち仕事、例えば洗面なども行える。着座後に歩行するときは、立上がった後に進行方向に向きを変える。休憩後に使用者2が起立し(ステップ107)、さらに歩行する場合は動作ボタン21中の歩行ボタンを選択する(ステップ108)。ステップ104で休憩を選択しない場合も、ステップ108に移行する。歩行ボタンが選択されると、ステップ102に移行する。
【0020】
ステップ108で歩行ボタンが選択される間は上記を繰り返す。ステップ108で歩行ボタンが選択されないときは、コントローラ15がブレーキ13a、13bを駆動して駆動車輪5a、5bを制動する。これにより、処理は終了される。上記動作においては、アーム10が移動する位置を、予め使用者2に合わせて設定している。しかし、操作手段20中のアーム操作ボタン23を用いて、使用者の膝の位置に膝当て9の位置を調整してもよい。
【0021】
本実施例によれば、膝当てを用いて歩行者が立上がるのを補助するとともに、立上がった後に膝当てを歩行の妨げにならない位置に移動させている。したがって、使用者が自分の意志で起立と歩行を行える。また、使用者が歩行している途中で膝当てに座ることができるので使用者の移動可能空間距離が増し、より広い生活空間が得られる。
【0022】
本実施例では、膝当てを円筒状にしたが、膝当ての形状はこれに限るものではなく、角柱状でも良い。その場合、角柱の面位置を制御すれば膝当てと着座の双方に対応できる。また、使用者の両膝を1本の膝当てで支持したが、左右の膝をそれぞれ別個に支持しても良い。また、本実施例では膝当てに着座しているが、着座には限らず休憩できる状態であればよい。例えば、腰を膝当てに預けるようにしてもよい。
【0023】
なお、上記実施例は例示的なものであり、限定的なものではない。本発明の真の精神及び範囲内に存在する変形例は、すべて特許請求の範囲に含まれる。
【0024】
【発明の効果】
本発明によれば、立上がりから歩行への動作に応じてアーム位置を変更するようにしたので、身体機能が低下した高齢者や障害者の負担を軽減して座った状態からの立上がりと立上がった後の歩行の動作を歩行支援装置が支援できる。これにより、使用者が生活空間内で自分の身体能力に応じて自立して移動することができる。
【図面の簡単な説明】
【図1】本発明に係る歩行支援装置の一実施例の歩行支援装置の側面図。
【図2】図1に示した歩行支援装置の上面図。
【図3】図1に示した歩行支援装置に用いられる操作手段の正面図。
【図4】図1に示した歩行支援装置における処理フローを示す図。
【図5】図1に示した歩行支援装置の歩行時の状態を説明する側面図。
【図6】図5に示した歩行支援装置の着座時の状態を説明する側面図。
【符号の説明】
1…歩行支援装置、2…使用者、3…サポータ、4…昇降手段、5a、5b…駆動車輪、6a、6b…伝動ベルト、7a、7b…駆動モータ、8a、8b…従動車輪、9…膝当て、10…アーム、11…伸縮手段、12…旋回手段、13a、13b…ブレーキ、14a、14b…回転センサ、15…コントローラ、16…台板、20…操作手段、21…動作ボタン、22…サポータ操作ボタン、23…アーム操作ボタン。
Claims (6)
- 使用者の身体を支える支持手段と、使用者の歩行を補助する移動手段とを有する歩行支援装置において、前記移動手段を制動する制動装置と、膝当てを有するアームと、このアームの長さを可変する伸縮手段と、前記アームを旋回させる旋回手段と、前記伸縮手段と旋回手段を制御する制御手段とを設けたことを特徴とする歩行支援装置。
- 前記アームは使用者の膝から膝当てに作用する力を検出する力検出手段を有し、前記制御手段はこの力検出手段が検出した力の大きさに応じて前記アームの位置を制御することを特徴とする請求項1に記載の歩行支援装置。
- 前記アームの長さと旋回角度を変更させる操作手段を有することを特徴とする請求項1に記載の歩行支援装置。
- 前記制御装置は前記操作手段からの指令に基いて、使用者が歩行中は前記アームを退避位置に位置付けることを特徴とする請求項3に記載の歩行支援装置。
- 前記制御装置は前記操作手段からの指令に基いて、使用者の起立時に前記膝当てを使用者の座る位置に移動させることを特徴とする請求項3に記載の歩行支援装置。
- 前記膝当てを円筒状としたことを特徴とする請求項1ないし5のいずれか1項に項記載の歩行支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002290577A JP4115798B2 (ja) | 2002-10-03 | 2002-10-03 | 歩行支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002290577A JP4115798B2 (ja) | 2002-10-03 | 2002-10-03 | 歩行支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004121569A true JP2004121569A (ja) | 2004-04-22 |
| JP4115798B2 JP4115798B2 (ja) | 2008-07-09 |
Family
ID=32282391
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002290577A Expired - Fee Related JP4115798B2 (ja) | 2002-10-03 | 2002-10-03 | 歩行支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4115798B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013529498A (ja) * | 2010-06-23 | 2013-07-22 | ゲート リハブ ディベロプメント エービー | 歩行器に組み込まれた立ち上がり支持体 |
| US8690801B2 (en) | 2010-06-21 | 2014-04-08 | Toyota Jidosha Kabushiki Kaisha | Leg assist device |
| JP2017104972A (ja) * | 2015-12-02 | 2017-06-15 | パナソニックIpマネジメント株式会社 | ロボット、ロボットの制御方法、及び、プログラム |
| CN112535616A (zh) * | 2020-11-25 | 2021-03-23 | 哈尔滨工业大学 | 一种可爬楼式助行机器人 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10192344A (ja) * | 1997-01-10 | 1998-07-28 | Japan Steel Works Ltd:The | 介助支援トランスファ装置 |
| JP2001008982A (ja) * | 1999-06-26 | 2001-01-16 | Data Tecno:Kk | 介助支援装置 |
-
2002
- 2002-10-03 JP JP2002290577A patent/JP4115798B2/ja not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10192344A (ja) * | 1997-01-10 | 1998-07-28 | Japan Steel Works Ltd:The | 介助支援トランスファ装置 |
| JP2001008982A (ja) * | 1999-06-26 | 2001-01-16 | Data Tecno:Kk | 介助支援装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8690801B2 (en) | 2010-06-21 | 2014-04-08 | Toyota Jidosha Kabushiki Kaisha | Leg assist device |
| JP2013529498A (ja) * | 2010-06-23 | 2013-07-22 | ゲート リハブ ディベロプメント エービー | 歩行器に組み込まれた立ち上がり支持体 |
| JP2017104972A (ja) * | 2015-12-02 | 2017-06-15 | パナソニックIpマネジメント株式会社 | ロボット、ロボットの制御方法、及び、プログラム |
| CN112535616A (zh) * | 2020-11-25 | 2021-03-23 | 哈尔滨工业大学 | 一种可爬楼式助行机器人 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4115798B2 (ja) | 2008-07-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9161871B2 (en) | Multiple function patient handling devices and methods | |
| EP3265043B1 (en) | Patient transfer and training aid | |
| JPH09570A (ja) | 姿勢変換装置および姿勢変換方法 | |
| CN108778633B (zh) | 起立步行辅助机器人 | |
| WO2009081938A1 (ja) | 運動補助装置 | |
| JP2006305092A (ja) | 移乗支援装置 | |
| JP2011067227A (ja) | 歩行補助装置 | |
| JPH0871114A (ja) | 電動立上り訓練器 | |
| KR101219305B1 (ko) | 보행보조용 플랫폼 | |
| JP2002224174A (ja) | スタンドアップリフト | |
| JP3792481B2 (ja) | 歩行補助装置 | |
| JP2011050557A (ja) | 歩行訓練機 | |
| JP2006325868A (ja) | 起立移動補助装置 | |
| JP2003265558A (ja) | 転倒防止歩行車 | |
| JP4115798B2 (ja) | 歩行支援装置 | |
| KR20160129986A (ko) | 기립 보조장치 | |
| JP6233057B2 (ja) | 介護支援装置 | |
| JP2714617B2 (ja) | 歩行屈伸動作補助装置 | |
| KR101190293B1 (ko) | 기립 이동 보조기 | |
| KR101662013B1 (ko) | 전동 보행 보조장치 | |
| JP4240585B2 (ja) | 座部昇降手段を備えたマッサージ椅子 | |
| JP4184509B2 (ja) | 下肢用訓練装置 | |
| JPH10192346A (ja) | 移乗機 | |
| WO2005053593A1 (en) | Apparatus and method for displacing persons from a sitting to a standing position | |
| JP3955362B2 (ja) | 歩行支援機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050413 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20060420 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20071119 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080122 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080317 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080415 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080416 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110425 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110425 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120425 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120425 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130425 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130425 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140425 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |