JP2004012311A - 移動体の情報端末 - Google Patents
移動体の情報端末 Download PDFInfo
- Publication number
- JP2004012311A JP2004012311A JP2002166560A JP2002166560A JP2004012311A JP 2004012311 A JP2004012311 A JP 2004012311A JP 2002166560 A JP2002166560 A JP 2002166560A JP 2002166560 A JP2002166560 A JP 2002166560A JP 2004012311 A JP2004012311 A JP 2004012311A
- Authority
- JP
- Japan
- Prior art keywords
- information
- unit
- positioning
- ship
- information terminal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000005540 biological transmission Effects 0.000 claims description 19
- 238000012937 correction Methods 0.000 abstract description 50
- 230000000694 effects Effects 0.000 abstract description 5
- 238000010586 diagram Methods 0.000 description 38
- 238000000034 method Methods 0.000 description 18
- 238000012545 processing Methods 0.000 description 9
- 238000004891 communication Methods 0.000 description 7
- 230000010365 information processing Effects 0.000 description 5
- 230000036544 posture Effects 0.000 description 5
- 238000007796 conventional method Methods 0.000 description 4
- 238000012876 topography Methods 0.000 description 3
- 230000004397 blinking Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 239000005433 ionosphere Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 239000005436 troposphere Substances 0.000 description 2
- 244000309464 bull Species 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000007667 floating Methods 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 238000010295 mobile communication Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 239000013535 sea water Substances 0.000 description 1
Images































Landscapes
- Instructional Devices (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
- Mobile Radio Communication Systems (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Abstract
【解決手段】情報端末は、GPS測位部、地図情報記憶部、移動体特性情報記憶部、判定部とを備えている。GPS測位部は、準天頂衛星を含む衛星群が送信するGPS情報、GPS測位補正情報を受信し、高精度測位をする。判定部は測位位置と、特性情報記憶部の記憶する特性情報と、地図情報記憶部の記憶する地図情報とを入力する。判定部は前記入力をもとに、移動体が移動を続けて良いかどうかを判断する。判定部が移動をすべきでないと判断した場合、その旨の警告等を行う。前記特性情報は移動体の詳細形状を示す情報を有し、詳細に移動体形状を特定できる。この詳細な形状特定と高精度測位により、移動体の高精度の移動支援が可能となる。
【選択図】 図3
Description
【発明の属する技術分野】
本発明は、移動体の情報端末に関する。また、移動体の移動支援に関する。例えば、船舶の接岸支援、湾内誘導支援、自動運転支援に関する。
【0002】
【従来の技術】
従来技術として特開平6−325300が存在する。特開平6−325300には船舶の航行支援システムについて記載されている。以下に、特開平6−325300の記載を紹介する。
【0003】
特開平6−325300によれば、例えば図33及び図34に示すように、船舶情報を指示する信号を受信する船舶情報受信部511と、該船舶情報受信部511より供給された船舶情報を収集処理する船舶情報処理部512と、上記収集処理された船舶情報を指示する信号を発信する船舶情報発信部513と、を含み地上局に設けられた海域情報処理装置510と、航行中の自船の周囲の海図情報を生成する海図情報発生部450と、航行中の自船の船舶情報を検出する自船情報検出部440と、該自船情報検出部440より供給された自船の船舶情報を指示する信号を発信する自船情報発信部420と、上記地上局の船舶情報発信部より発信された他船の船舶情報を指示する信号を受信する他船情報受信部430と、該他船情報受信部430より供給された他船の船舶情報と上記自船情報発信部420より供給された自船の船舶情報と上記海図情報発生部450より供給された海図情報とを処理して自船の航行状況を生成する航行情報処理部460と、該航行情報処理部460より供給された航行状況を表示する航行状況表示部470と、を含み航行中の船舶の各々に設けられた海域情報表示装置21と、上記地上局の船舶情報受信部511と上記各船舶の自船情報発信部420との間の送信及び受信と上記地上局の船舶情報発信部513と上記各船舶の他船情報受信部430との間の送信及び受信とをなすための移動体通信衛星560と、上記各船舶の自船情報検出部440に船舶情報を供給するGPS衛星550と、を含む海域情報通信ネットワークと、を有し、上記航行中の船舶の各々に設けられた航行状況表示部470にて表示された自船の周囲の他船状況及び海域情報に基づいて各船舶が航行するように構成されている。
【0004】
特開平6−325300によれば、例えば図34に示すように、船舶の航行支援システムにおいて、上記自船情報検出部440によって検出された自船の船舶情報に基づいて自船と周囲の他船との間の位置関係が求められ、上記海図情報発生部450より供給された海図情報に基づいて自船の周囲の障害物が検出され、上記航行状況表示部470によって上記自船と周囲の他船との間の位置関係と上記自船の周囲の障害物とが表示されるように構成されている。
【0005】
特開平6−325300によれば、例えば図35に示すように、船舶の航行支援システムにおいて、上記自船情報検出部440は自船の位置、船首方位、自船の速度、自船の識別記号、自船の寸法及び船種を含む自船の船舶情報を記憶する記憶装置441と自船の航行状態を検出する検出装置442とGPS衛星550より発信された信号を受信するGPS受信機443とを有する。
【0006】
特開平6−325300によれば、例えば図35に示すように、船舶の航行支援システムにおいて、衝突又は座礁を回避するための避航に際して自船の設定航路を変更するためのコンソール482と設定航路上に自船を誘導するための操船コントローラ481とを含む操船装置480を有し、上記自船の船舶情報と自船周囲の上記他船の船舶情報と上記海図情報とより自船の状況及び自船周囲の状況を生成しそれを上記航行状況表示部470に表示するように構成されている。
【0007】
特開平6−325300によれば、例えば図34に示すように、船舶の航行支援システムにおいて、上記海域情報表示装置410の航行情報処理部460は上記自船の船舶情報と自船周囲の上記他船の船舶情報と上記海図情報とより衝突又は座礁の危険の可能性を分析評価し、該危険の可能性は上記海域情報表示装置410の航行状況表示部470によって表示されるように構成されている。
【0008】
【発明が解決しようとする課題】
従来の技術においては準天頂衛星を用いた高精度測位が十分提供されていなかった。また、従来の技術では、自船情報としては自船の寸法として自船の全長を用いるに過ぎず、高精度の船舶の支援が不十分であった。
【0009】
本発明は、たとえば準天頂衛星の高精度測位機能を生かした移動体情報端末の提供を目的とする。
また、移動体の詳細形状を考慮した、高精度の移動体の運行支援を目的とする。
また、移動体の高精度の運行支援により、運行作業の効率化、安全性の向上、コスト低減を目的とする。
また、準天頂衛星、静止衛星、GPS衛星等の衛星群と、地上局と、情報端末を備える移動体とによる移動体支援システムを構築し、この移動体支援システムに用いる情報端末を提供することで移動体支援の利便性向上を目的とする。
【0010】
【課題を解決するための手段】
本発明の情報端末は、移動体に装備される情報端末であって、
GPS(グローバル・ポジショニング・システム)衛星からの電波を受信し前記情報端末の位置を測位して測位位置を出力するGPS測位部と、
少なくとも前記移動体の形状を示す形状情報と前記移動体に装備される情報端末の移動体への配置箇所を示す配置情報とを含む前記移動体に関する特性情報を記憶する特性情報記憶部と、
地図情報を記憶する地図情報記憶部と、
前記GPS測位部が出力した前記情報端末の測位位置と前記特性情報記憶部が記憶した前記特性情報のうち移動体の形状情報と情報端末の配置情報と前記地図情報記憶部が記憶した地図情報とを入力し、入力した前記移動体の形状情報と情報端末の配置情報と前記情報端末の測位位置とから現在の移動体の存在範囲を認識し、前記認識した現在の移動体の存在範囲と入力した前記地図情報とに基づいて、前記移動体の移動の可否を判定する判定部と
を備えたことを特徴とする。
【0011】
本発明の移動体の情報端末は、移動体に装備される情報端末であって、
GPS(グローバル・ポジショニング・システム)衛星からの電波を受信し前記情報端末の位置を測位して測位位置を出力するGPS測位部と、
少なくとも前記移動体の形状を示す形状情報と前記移動体に装備される情報端末の移動体への配置箇所を示す配置情報とを含む前記移動体に関する特性情報を記憶する特性情報記憶部と、
前記GPS測位部が出力した前記情報端末の測位位置と前記特性情報記憶部が記憶した前記特性情報のうち移動体の形状情報と情報端末の配置情報とを入力し、入力した前記移動体の形状情報と情報端末の配置情報と前記情報端末の測位位置とから現在の移動体の存在範囲を認識する認識部と、
前記認識部が認識した現在の移動体の存在範囲を送信する送信部と
を備えたことを特徴とする。
【0012】
本発明の移動体の情報端末は、移動体に装備される情報端末であって、
GPS(グローバル・ポジショニング・システム)衛星からの電波を受信し前記情報端末の位置を測位して測位位置を出力するGPS測位部と、
少なくとも前記移動体の形状を示す形状情報と前記移動体に装備される情報端末の移動体への配置箇所を示す配置情報とを含む前記移動体に関する特性情報を記憶する特性情報記憶部と、
地図情報を受信する地図情報受信部と、
前記GPS測位部が出力した前記情報端末の測位位置と前記特性情報記憶部が記憶した前記特性情報のうち移動体の形状情報と情報端末の配置情報と前記地図情報受信部が受信した地図情報とを入力し、入力した前記移動体の形状情報と情報端末の配置情報と前記情報端末の測位位置とから現在の移動体の存在範囲を認識し、前記認識した現在の移動体の存在範囲と入力した前記地図情報受信部が受信した地図情報とに基づいて、前記移動体の移動の可否を判定する判定部と
を備えたことを特徴とする。
【0013】
本発明の移動体の情報端末は、移動体に装備される情報端末であって、
GPS(グローバル・ポジショニング・システム)衛星からの電波を受信し前記情報端末の位置を測位して測位位置を出力するGPS測位部と、
少なくとも前記移動体の形状を示す形状情報と前記移動体に装備される情報端末の移動体への配置箇所を示す配置情報とを含む前記移動体に関する特性情報を記憶する特性情報記憶部と、
地図情報を記憶する地図情報記憶部と、
他の移動体が送信した他の移動体の位置情報を受信する受信部と、
前記GPS測位部が出力した前記情報端末の測位位置と前記特性情報記憶部が記憶した前記特性情報のうち移動体の形状情報と情報端末の配置情報と前記地図情報記憶部が記憶した地図情報と前記受信部が受信した他の移動体が送信した送信情報とを入力し、入力した前記移動体の形状情報と情報端末の配置情報と前記情報端末の測位位置とから現在の移動体の存在範囲を認識し、前記認識した現在の移動体の存在範囲と入力した前記地図記憶部が記憶した地図情報と前記受信部が受信した他の移動体の位置情報とに基づいて、前記情報端末を装備する移動体の移動の可否を判定する判定部と
を備えたことを特徴とする。
【0014】
本発明の移動体の情報端末は、移動体に装備される情報端末であって、
GPS(グローバル・ポジショニング・システム)衛星からの電波を受信し位置を測位して測位位置をそれぞれ出力する複数のGPS測位部と、
前記複数のGPS測位部によりそれぞれ出力された前記測位位置に基づいて前記移動体の移動の可否を判定する判定部とを備えたことを特徴とする。
【0015】
【発明の実施の形態】
実施の形態1.
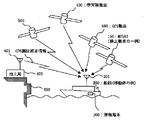
図1は、船舶(移動体の一例)に情報端末300を備えた場合を示す図である。図1で100は準天頂衛星、150はMTSAT(Multi−functional Transport Statellite:多目的衛星)であり、静止衛星の一例である。200は船舶、201は船舶200のアンテナ、300は情報端末、400は地上局、401は地上局のアンテナ、500はGPS衛星、690は船舶が接岸する港の段差形状を表している。なお、図1では、衛星は準天頂衛星100を1機と、GPS衛星500を2機と、静止衛星の例としてMTSAT150を1機の計4機を図示しているが、4機に限定するわけではなく、以下に述べるように、これら衛星は4機以上あっても構わない。図1に示すように情報端末300を船舶200が装備している場合を例に説明する。船舶200は情報端末300を用いて準天頂衛星100及びGPS衛星500が送信するGPS情報と地上局400、あるいは準天頂衛星100、あるいはMTSATが送信するGPS測位補正情報(例えば、ディファレンシャル補正情報)を受信することで、自己たる船舶200の位置を測位する。このGPS測位補正情報に関しては、情報端末300を備えた船舶200が船舶200の位置を測位する場合は、GPS情報だけでも測位が可能ではある。しかし、電離層や対流圏等による伝搬系の誤差が生じる。そのため、この誤差を補正する目的から、情報端末300は前記GPS測位補正情報を受信し、受信したGPS測位補正情報を使用して、測位位置の精度劣化要因である前記電離層や対流圏等の伝搬系の誤差を補正している。また、情報端末300は、地図情報と自己の船舶の形状情報や速度等の船舶200の自分自身の移動体特性情報を備えている。情報端末300は判定部を備え、判定部は前記GPS測位位置と前記地図情報と前記船舶200の移動体特性情報をもとに船舶200が移動してよいかどうかを判定する。これら情報端末300の構成については後に詳しく説明する。
【0016】
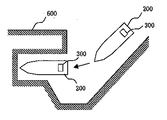
図2は情報端末300を装備した船舶200が、図2の形状をした港600に入港する場合を示している。船舶200は情報端末300の判定に従い港600に容易に入港することができる。あるいは情報端末300が出力する判定結果を、船舶200の移動体移動制御部(後述する)が入力し船舶200を制御しつつ港600に入港させる事ができる。
【0017】
以下は船舶が情報端末を装備する場合を例にとり説明する。
図3は、本発明の実施の形態1における情報端末300の構成を示す図である。
図3において、300は情報端末を示す。また、図3において10はGPS測位部、11はGPS情報受信部、12は位置計算部、13はディファレンシャル補正情報受信部、14はGPS情報受信アンテナ、15はディファレンシャル補正情報受信アンテナ、20は地図情報記憶部、30は移動体特性情報記憶部、40は判定部、50は判定結果出力部、60は移動体移動制御部である。移動体情報端末300は情報端末の一例であり、GPS測位部10、地図情報記憶部20、移動体特性情報記憶部30、判定部40を有する。
【0018】
図3においてGPS測位部10は、アンテナ14の受信するGPS情報とアンテナ15が受信するディファレンシャル補正情報をもとに測位する。GPS測位部10はGPS情報受信部11、ディファレンシャル補正情報受信部13、位置計算部12とからなる。GPS情報受信部11はGPS情報をアンテナ14を介して受信する。ディファレンシャル補正情報受信部13はディファレンシャル補正情報をアンテナ15を介して受信する。位置計算部12は、GPS情報受信部11が受信したGPS情報とディファレンシャル補正情報受信部13が受信したディファレンシャル補正情報とに基づいて位置計算を行う。そして、この測位位置の計算結果を判定部40へ出力する。
【0019】
GPS測位部10に関して、図4は、準天頂衛星を利用した測位システムの構成を示す図である。
図4において、100は、準天頂衛星、500は、GPS衛星、150は、MTSATである。GPS衛星500は、測位情報を放送する。準天頂衛星100と静止衛星の一例であるMTSAT150とは、GPS補完衛星でもあり、測位情報として、例えば、ディファレンシャル測位補正データとインテグリティデータと等を有する高精度測位情報を放送する。ここでは、MTSAT150を用いているが静止衛星の一例として用いたものであり、他の静止衛星であっても構わない。ユーザは、情報端末300を用いて、例えば、1機の準天頂衛星100と3機のGPS衛星500との組み合わせ、1機の準天頂衛星100と3機の静止衛星との組み合わせ、或いは、1機の準天頂衛星100と、GPS衛星500とMTSAT150とによる3機の衛星との組み合わせ、すなわち、少なくとも準天頂衛星100を含む4機の衛星群により測位に必要な位置情報を得ることができる。また、4機に限らず4機より多くの衛星群により測位に必要な位置情報を得ても構わない。
地上には、測位情報配信センター局、全国に配置される電子基準点を配置する。電子基準点は、固定点として自己の基準位置を有する。全国に配置される電子基準点は、例えば、隣接する複数の電子基準点で取り囲む範囲を1つのメッシュとして全国を電子基準点網で網羅する。全国に配置される電子基準点は、上記4機以上の衛星群により測位に必要な位置情報を得る。そして、自己の有する基準位置と上記4機以上の衛星群により得た位置情報による位置との誤差等の測位補正情報を測位情報配信センター局に出力する。ここでは、全国を電子基準点網で網羅するため、メッシュ内のある位置においても補正精度を向上させることができる。測位情報配信センター局は、全国に配置される電子基準点より測位補正情報を入力し、入力された測位補正情報を収集、統合して収集統合情報を作成し、所定のアンテナを介して準天頂衛星100等の衛星に送信する。上記準天頂衛星100等は、測位情報配信センター局より所定のアンテナを介して準天頂衛星100等の衛星に送信された収集統合情報に基づき、高精度測位情報を放送する。ユーザは、遮蔽が少ない高仰角である準天頂衛星100を少なくとも用いることで、山影等に位置することによる遮蔽や建物等の障害物による遮蔽を極力回避し、遮蔽を回避することにより測位可能時間を改善することができる。また、ユーザは、少なくとも準天頂衛星100を含む4機以上の衛星群と地上に配置された測位情報配信センター局及び全国に配置される電子基準点とを有するシステムにより補正された高精度測位情報を得ることにより、高精度の位置情報を得ることができる。このように、ユーザは、準天頂衛星100を用いることにより、高精度の位置情報、例えば、地上や海上等において、25cmの誤差範囲の精度で位置情報を得ることができる。
【0020】
具体的には、例えば、GPS情報受信部11は、準天頂衛星100を含む複数の衛星からGPS情報を受信する。複数の衛星は、上記のように、1機の準天頂衛星100と3機のGPS衛星500との組み合わせ、1機の準天頂衛星100と3機の静止衛星でとの組み合わせ、或いは、1機の準天頂衛星100と、GPS衛星500とMTSAT150とによる3機の衛星との組み合わせ、すなわち、少なくとも準天頂衛星100を含む4機の衛星群により構成される。GPS情報は、複数の衛星の各衛星から送信される。GPS情報受信部11は、前記GPS情報を受信し、位置計算部12に出力する。但し、ディファレンシャル補正情報は準天頂衛星100と場合により静止衛星(例えば、MTSAT150)、あるいは地上局400とから送信される。ディファレンシャル補正情報受信部13は、このディファレンシャル補正情報を受信し、位置計算部12に出力する。位置計算部12は、GPS情報受信部11にから入力されたGPS情報、ディファレンシャル補正情報受信部13から入力されたディファレンシャル補正情報とに基づき測位計算をする。
【0021】
地図情報記憶部20は地図情報を記憶する。地図情報とは、(X、Y、Z)の座標情報からなる、例えば船舶200が航行する湾内の形状、あるいは図2のような、寄港する港600の形状に関する情報をいう。海図情報のような海底の地形も含む。また、海水面高さの情報も含む。
【0022】
図5は、地図情報記憶部20が記憶する地図情報の一例である。船舶200が航行する場合を例にとる。例えば、図2に示したような船舶200が入港する港の地形情報である。図2の港600のような形状を(X、Y)の二次元情報として記憶する他、高さ方向のZまで含めた(X,Y、Z)の三次元情報であってもよい。例えば、図1の接岸箇所690のように高さ方向で形状が変化する場合に意味がある。さらに、海底の地形情報(海図情報)を三次元で記憶していてもよい。座礁を回避できる点で意味がある。また、地図情報の一例として潮時情報を記憶していてもよい。座礁の危険を回避できる点で意味がある。地図情報の座標は後述する船舶200の存在範囲を示す座標と座標軸を共通にする。したがって、船舶200の存在範囲における船舶200上の点A(Xs、Ys、Zs)と地図情報における地図上の点B(Xm、Ym、Zm)とは、その距離は各成分の差の自乗和の平方根をとることで計算により直ちに求められる。地図情報記憶部20は地図情報を判定部40に出力する。
【0023】
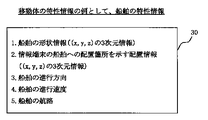
移動体特性情報記憶部30は、船舶200についての移動体特性情報を記憶する。図6は移動体特性情報の例を示す。船舶200の形状情報や情報端末300の船舶200への配置箇所を示す配置情報や、船舶200の船首方向、船尾方向、速度、航路などを移動体特性情報として記憶している。そして、移動体特性情報記憶部30は、この記憶している移動体特性情報を判定部40へ出力する。図6は、移動体特性情報の例として、船舶200の特性情報を示す。移動体特性情報記憶部30は、1.船舶200の形状情報を有する。形状情報とは、例えば、船舶200の特定の位置を原点(0,0,0)としたときの船舶200の各位置の(X,Y,Z)の三次元情報である。また、三次元情報に限らず、船舶200の特定の位置を基準として船舶200の形状が特定できる情報であれば構わない。船舶200の航行の可否を判定するものであるから、通常、外部形状を示す形状情報で十分であるが、それに限定されることはない。移動体特性情報記憶部30は、2.情報端末300の船舶200への配置箇所を示す配置情報を有する。例えば、情報端末300の前記配置は(X,Y,Z)の三次元情報である。この配置箇所は、通常船舶200の形状情報の原点と一致する。すなわち情報端末は船舶200の形状情報の原点座標に配置される。しかし、これに限定される事はなく、情報端末300の配置箇所は、船舶200の形状情報の原点(0,0,0)とは一致してもよいが、一致しない場合でもよい。この場合、情報端末300の配置箇所を船舶200の形状情報の原点とみた座標変換をすればよい。
【0024】
判定部40は、前記のGPS測位部10が出力した測位位置、移動体特性情報記憶部30が出力した移動体特性情報のうちの船舶200の形状情報と船舶200への情報端末300の配置箇所を示す配置情報、及び地図情報記憶部20が出力した地図情報を入力する。そして、判定部40は、船舶200の形状情報と、船舶200への情報端末300の配置箇所を示す配置情報とに基づき、船舶200の存在範囲を認識する。ここで、船舶200の存在範囲とは、GPS測位部10が測位した時刻における船舶200が現実に存在している範囲をいい、GPS測位部10が測位した時刻における船舶200の外周部あるいは船体外部の輪郭あるいは外部形状の三次元空間占有領域を意味する。そして、判定部40が船舶200の存在範囲を認識するということは、船舶200の位置、船首方向、姿勢(船舶200の傾きなど)などを認識することを意味する。
【0025】
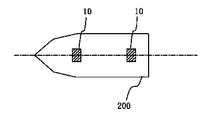
船舶200の形状が球体であればGPS測位部10が一箇所の場合でも船舶200の存在範囲が100%認識できる。しかし、GPS測位部10が一箇所の場合は、船舶200の存在範囲の認識が不十分な場合もある。前記測位位置、船舶200の形状情報、船舶200への情報端末300の配置箇所を示す配置情報からでは、図7に示すように情報端末300の位置(GPS測位部10の位置)が確定できても船首がどの方向を向いているか、250の方向なのか、260の方向なのか特定できない場合があるからである。その場合は船首方向を特性情報の一つとして判定部40に入力すればよい。ただし、姿勢(傾き)までは具体的に認識できない。GPS測位部10が2つあれば測位位置、船舶200の形状情報、船舶200への情報端末300の配置箇所を示す配置情報から船舶200の存在範囲が、GPS測位部一つの場合よりも、より具体的に特定できる。図8のように全長方向に沿ってGPS測位部10を2個設ければ、船首方向の情報がなくとも測位位置に対する船舶200の船首方向がわかる。さらに、図9のように船舶200の傾き(ピッチ角度α)も認識できる。また、GPS測位部を図10のように、船舶200の全幅方向に2つ設けると船首方向、及び図12のような船舶200の傾き(ロール角度β)も認識できる。ただ、これらの場合、2つのGPS測位部10を結ぶ直線まわりの船舶200の回転角度が認識できないという問題が残る。
【0026】
その場合は、図11のようにGPS測位部10を三個、三角形をなすように配置すればよい。これにより図9に示す船舶200のピッチング角度αや、図12に示すローリング角度β等の進行方向を含むすべての姿勢を認識することができる。姿勢を認識できると、図9、あるいは図12に示すように、座礁を回避することができるなどの効果がある。なお、準天頂衛星100を用いた高精度測位においては誤差は25cmのレベルであることを考えると、この誤差を考慮し、複数のGPS測位部10を設ける場合は25cmを超える所定の距離を確保する。
【0027】
判定部40は、船舶200の存在範囲を認識し、この認識に基づいて船舶200が、そのまま移動を続けてよいかどうかを判定する。以下に判定の例を示す。図13においては、船舶200の存在範囲が認識されている場合は、船舶200の外部形状上の任意の点A(Xs、Ys、Zs)が定まる。また判定部40が入力した地図情報により接岸する港600を示す形状上の任意の点の座標B(Xm、Ym、Zm)が定まる。これにより、これらの座標からA〜B間の距離Lが計算できる。あらゆる船舶200上の点A(Xs、Ys、Zs)とあらゆる地図情報の点B(Xm、Ym、Zm)との間の距離Lを求め、Lが所定の距離LO以下の場合、判定部40は船舶200が移動を続けてはいけないと判定する。LがLOをより長い場合は、判定部40は船舶200が移動を続けてもよいと判定する。ここに判定の基準となるLOは、例えば、船舶の大きさ、重量、速度、動力性能などから決定してもよい。判定値LOに対して、準天頂衛星100を用いた高精度測位によれば、誤差25cmレベルでの判定が可能である。船舶200の場合、判定値LOは数十メートル〜少なくとも数メートルであるから、LOに対しては誤差25cmレベルの高精度な判定が可能となる。判定の別の例として航路が設定されている場合の判定について説明する。図14は、船舶200の航路530が設定されている場合の図である。判定部40は船舶200の存在範囲が設定航路530から外れていないかどうかを判定する。設定航路から外れているかどうかの判定は、準天頂衛星100を用いた高精度測位により25cmレベルで測位し判定できる。このため東京湾のような船舶が過密する湾内においては、航路を正確にトレースすることができる。したがって、航行の安全、迅速化を図ることができる。判定部40は、船舶200が移動を続けてもよいと判定したときは、さらにGPS測位部10が測位する。判定部40が、船舶200が移動を続けてはいけないと判定したときは、その判定結果を判定結果出力部50へ出力する。判定結果出力部50はこの出力を入力して警告を発する。警告は音声を発してもよいし、画面に警告を表示してもよいし、発光体を点滅させてもよいし、プリンターに警告を出力しても構わない。また、判定部40は、移動を続けてはいけない旨の判定結果を船舶200の移動体移動制御部60に出力する。この判定結果を入力した前記移動体移動制御部60は、船舶200の移動を停止しあるいは移動を変更する制御を行う。
【0028】
図15は実施の形態1の情報端末300が行う処理のフローチャートである。まず、S1010でGPS情報、ディファレンシャル補正情報を受信してGPS測位部10が測位する。S1020で判定部40が前記測位位置、船舶200の特性情報、地図情報を入力する。次にS1030では、判定部が測位位置、船舶200の特性情報のうち形状情報と情報端末300の配置情報とから移動体である船舶200の存在範囲を認識する。S1040では、判定部40が、船舶200の存在範囲と地図情報に基づき船舶200の移動の可否を判定する。移動を続けてもよいという判定のときはS1040からS1010へ戻る。移動を続けるべきでないという判定のときは、S1040からS1050へ進む。S1050では移動を続けるべきでない旨の表示をする。この表示は上述のように、音声による警告や、発光体の点滅や、画面への表示やプリンターの出力などである。S1060では判定結果を移動体(船舶200)の移動体移動制御部60へ出力する。この判定結果を入力した移動体移動制御部60は移動体である船舶200の航行を制御する。
【0029】
準天頂衛星100を用いたディファレンシャル補正情報のGPS測位であり25cmレベルの高精度な測位が可能である。移動体の特性情報として、特に移動体の詳細な形状までを考慮して移動体の存在範囲を認識するものである。このため移動体を点で特定していた従来に比べ、移動体の位置及び大きさ、さらに姿勢までも高精度で認識するものである。
【0030】
本実施の形態1によれば、準天頂衛星100を用いた高精度測位により高精度の移動体の移動誘導が可能である。船舶200が入港する場合の接岸サポートする場合に、測位位置に加えて、船舶200の形状も加味した接岸サポートが可能となる事から、高精度の接岸サポートが可能となる。安全性の向上、接岸時間の効率化によるコスト低減の効果がある。さらに準天頂衛星100は常に日本上空にいるため、日本の港における接岸支援、及び日本の湾内における航行の安全確保に寄与する。
【0031】
以上のように、実施の形態1における上記情報端末は、例えば上記測位システムで用いられるものである。すなわち、上記説明したように、上記測位システムは、固定点として自己の基準位置を有し隣接するどうしで一つのメッシュを形成し測位補正情報を測位情報配信センターに局に出力する電子基準点と、前記電子基準点より測位補正情報を入力し入力した測位補正情報を収集、統合して収集統合情報を作成し、所定のアンテナを介して準天頂衛星100等に送信する測位情報配信センターと、1機の準天頂衛星と3機のGPS衛星との組み合わせ、1機の準天頂衛星と3機の静止衛星との組み合わせ、或いは、1機の準天頂衛星と、GPS衛星とMTSATとによる3機の衛星との組み合わせ、すなわち、少なくとも準天頂衛星を含む4機の衛星群(4機以上の衛星群でも構わない)と、前記衛星群から受信した信号をもとに位置を測位する情報端末を備えた移動体(一例として船舶)とから構成される。
そして、上記システムで用いられる情報端末は、
移動体に装備される情報端末であって、
GPS(グローバル・ポジショニング・システム)衛星からの電波を受信し前記情報端末の位置を測位して測位位置を出力するGPS測位部と、
少なくとも前記移動体の形状を示す形状情報と前記移動体に装備される情報端末の移動体への配置箇所を示す配置情報とを含む前記移動体に関する特性情報を記憶する特性情報記憶部と、
地図情報を記憶する地図情報記憶部と、
前記GPS測位部が出力した前記情報端末の測位位置と前記特性情報記憶部が記憶した前記特性情報のうち移動体の形状情報と情報端末の配置情報と前記地図情報記憶部が記憶した地図情報とを入力し、入力した前記移動体の形状情報と情報端末の配置情報と前記情報端末の測位位置とから現在の移動体の存在範囲を認識し、前記認識した現在の移動体の存在範囲と入力した前記地図情報とに基づいて、前記移動体の移動の可否を判定する判定部と
を備えたことを特徴とする。
【0032】
実施の形態2.
図16は実施の形態2における構成を示す図である。船舶200を例にとる。船舶200が情報端末300を装備している点は実施の形態1と同じである。実施の形態2では情報端末300が送信部70を有している点が実施の形態1と異なる。実施の形態2は、情報端末300が移動体である船舶200の存在範囲を送信する送信部70を有することを特徴とする。図17は、船舶200に装備された情報端末300が送信部70から船舶200の存在範囲を送信する場合を示している。以下、図16、図17をもとに実施の形態2について説明する。
【0033】
図16は実施の形態2の構成図であるが、実施の形態1の構成図である図3に対して送信部70を備えた点がことなる。なお判定部40は認識部の一例である。
【0034】
GPS測位部10がGPS情報、ディファレンシャル補正情報に基づき位置を測位する。GPS測位部10は、測位位置を判定部40へ出力する。また、船舶200についての特性情報を記憶する移動体特性情報記憶部30から船舶200の特性情報を判定部40へ出力する。判定部は測位位置及び船舶200の特性情報を入力して、測位位置と特性情報のうち船舶200の形状情報と船舶200への情報端末300の配置情報とから前記測位位置を測位した時刻における船舶200の存在範囲を認識する。船舶200の存在範囲の認識については実施の形態1と同じである。すなわち、船舶200の特定位置を原点にとった場合の形状の三次元情報をもとに、船舶200の形状を特定し、また、測位位置の座標は形状情報の原点と一致させている。これにより、船舶200の形状を加味した、船舶200の存在範囲が認識できる。そして、存在範囲のみでは、船舶200がどの方向に向かっているかや、いかなる速度で航行しているかは分からない。よって、移動体特性情報記憶部30は、船舶200の形状情報や情報端末300の船舶200への配置情報の他に船舶200の航行速度や、船首方向、移動方向を有しており、前記船舶200の存在範囲と、前記航行速度、航行方向から船舶200の移動状況を把握することができる。このことは実施の形態1と同様である。また、移動体特性情報記憶部30は、移動体特性情報として船舶の重量なども有しているのは実施の形態1の場合と同様である。送信部70は、判定部40から船舶200の存在範囲を入力し、また移動体特性情報記憶部30から船舶200の速度、航行方向、重量、航路等を入力し、これをアンテナ16から送信する。
【0035】
送信部70が送信する送信先は、図17に示すように、地上局へ送信してもよいし、準天頂衛星100あるいはその他の衛星へ送信してもよいし、他の船舶あるいは他の移動体へ送信してもよい。
【0036】
図18は、例えば湾内の船舶の航行を管理する地上局が前記情報端末300の送信を受けた場合を示す図である。前記地上局は図18に示す船舶200、他の船舶210から送信を受ける。この場合は、地上局はディスプレイ装置を備えておけば、ディスプレイ装置により図18のような状態を映像で確認できる。そして、ディスプレイ装置により各船舶の位置、方向、さらには各船舶の相対的な大きさまでも把握する事ができる。これは、湾内の航行の安全性向上に寄与する。
【0037】
図19は、実施の形態2における情報端末300が行う処理のフローである。S2010では、GPS測位部10がGPS情報、ディファレンシャル補正情報を受信し、これらに基づいて位置計算部が測位位置を算出する。S2020では判定部40(認識部の一例)は、前記測位位置と移動体特性情報記憶部30が記憶する船舶200の特性情報を入力する。S2030では、判定部が入力した測位位置と船舶200の特性情報のうちの船舶200の形状情報と船舶200への情報端末300の配置情報とから船舶200の存在範囲を認識する。この認識結果を判定部40は送信部へ出力する。
S2040では、送信部70は移動体特性情報記憶部30から出力された特性情報を入力し、判定部40から入力した船舶200の存在範囲と前記入力した特性情報を送信する。そしてS2010へ戻る。
【0038】
実施の形態2では情報端末300が送信部を備えており、情報端末300を装備した船舶200の存在範囲及び船舶200に関する移動体特性情報を送信することに特徴がある。送信先は地上局、船舶を含む他の移動体、準天頂衛星100を含む衛星のいずれでも構わない。
【0039】
実施の形態2において、情報端末300が送信部70を有することで、移動体である船舶200の移動状況を地上局、他の移動体等へ知らせることで航行の安全、円滑を確保する事が出来る。接岸の迅速化や効率の向上によるコストダウンを図ることができる。なお情報端末300が受信部を備えている場合については以下の実施の形態3と実施の形態4で述べる。
【0040】
以上のように、実施の形態2における上記情報端末は、例えば実施の形態1と同様の測位システムで用いられるものである。すなわち、上記説明したように、上記測位システムは、固定点として自己の基準位置を有し隣接するどうしで一つのメッシュを形成し測位補正情報を測位情報配信センターに局に出力する電子基準点と、前記電子基準点より測位補正情報を入力し入力した測位補正情報を収集、統合して収集統合情報を作成し、所定のアンテナを介して準天頂衛星100等に送信する測位情報配信センターと、1機の準天頂衛星と3機のGPS衛星との組み合わせ、1機の準天頂衛星と3機の静止衛星との組み合わせ、或いは、1機の準天頂衛星と、GPS衛星とMTSATとによる3機の衛星との組み合わせ、すなわち、少なくとも準天頂衛星を含む4機の衛星群(4機以上の衛星群でも構わない)と、前記衛星群から受信した信号をもとに位置を測位する情報端末を備えた移動体(一例として船舶)とから構成される。
そして、上記システムで用いられる情報端末は、
移動体に装備される情報端末であって、
GPS(グローバル・ポジショニング・システム)衛星からの電波を受信し前記情報端末の位置を測位して測位位置を出力するGPS測位部と、
少なくとも前記移動体の形状を示す形状情報と前記移動体に装備される情報端末の移動体への配置箇所を示す配置情報とを含む前記移動体に関する特性情報を記憶する特性情報記憶部と、
前記GPS測位部が出力した前記情報端末の測位位置と前記特性情報記憶部が記憶した前記特性情報のうち移動体の形状情報と情報端末の配置情報とを入力し、入力した前記移動体の形状情報と情報端末の配置情報と前記情報端末の測位位置とから現在の移動体の存在範囲を認識する認識部と、
前記認識部が認識した現在の移動体の存在範囲を送信する送信部と
を備えたことを特徴とする。
【0041】
実施の形態3.
図20は実施の形態3における構成を示す図である。図20は、実施の形態1の構成を示す図3に対して、地図情報を受信する地図情報受信部80を備えたことと、判定結果出力部50が警告発生部51と表示部52に分かれている点が異なる。
【0042】
実施の形態3における情報端末300は地図情報記憶部20の有している情報のほかに、地図情報受信部80で受信した地図情報をもとに船舶200が移動を続けてよいかどうか判定することに特徴がある。図21のように、船舶200に配置された情報端末300の地図情報受信部80は、地上局400や準天頂衛星100やGPS衛星や、他の船舶210、その他の移動体などから地図情報を受信する。特に、地上局400が地図情報を送信する場合を中心に説明する。例えば、地上局400は、直接に船舶200に地図情報を送信するための通信装置と通信アンテナとを備えている。また、地上局400は、衛星に地図情報を送信し、衛星経由で船舶200に地図情報を送信するための衛星通信装置と衛星通信アンテナとをも備えている。船舶200(情報端末300)の受信する地上局から送信された地図情報は、情報端末300が地図情報記憶部20に記憶している地図情報よりも、通常は詳細な情報又は最新の情報又は現時刻における情報である。地図情報は、港の形状や海底の地形のように通常変化のないものや、港が工事された後の形状が変化後の形状、海水面の高さのように時刻により変化する情報でもよい。特に局地的な詳細情報を必要とする場合に効果が大きい。図22は海上に浮かぶブイを示す。ブイ700は通信機器を装備しており、随時、海水面の情報を地上局400へ送信する。図21では、先のブイ700から地上局400へ送信された海水面の情報は、さらに地上局400より直接に船舶200へ地図情報として送信される。あるいは、地上局400から、準天頂衛星100を介して船舶200へ送信される。特に準天頂衛星100は常に日本上空に存在するため、受信する地図情報を頼りにして日本国内の港に船舶600が入港するような場合に意味がある。また、図21においては、ブイ700による海水面の情報のほかに、例えば、海底の地形800を地図情報として、海水面の情報と同様のルートで送信すれば、船舶200は海底の地形800と海水面情報とを得ることができるので、船舶200は、これらを座礁回避の有力な判断材料とすることができる。図23は、地図情報として港600の形状を情報端末300が受信する場合を示すものである。図23は地図情報として、港600の所定の各位置に発信機900を設置しておき、情報端末300の地図情報受信部80は、発信機900の発信する電波により港600の形状を特定する。
【0043】
図24は実施の形態3における情報端末300が行う処理のフローチャートである。
実施の形態1のフローチャートである図15に対して受信部が地図情報を受信するステップであるS3020がある点が異なる。S3010では、GPS測位部10がGPS情報及びディファレンシャル補正情報に基づき測位する。S3020では地図情報受信部80が地図情報を受信する。S3030では、判定部40は地図情報受信部80の受信した地図情報、測位情報、船舶200の特性情報を入力する。S3040では、判定部40は測位位置、船舶200の特性情報のうち形状情報と船舶200への情報端末300の配置情報とから船舶200の存在範囲を認識する。
S3050では前記船舶200の存在範囲、及び前記地図情報受信部80が受信した地図情報に基き、また船舶200の速度、移動方向などの特性情報とから船舶200が移動を続けてよいかどうかを判定する。なお地図情報は地図情報記憶部20が記憶する地図情報、地図情報受信部80が受信した地図情報のいずれを用いてもよい。両者を用いてもよい。
移動を続けてもよいという判定の場合はS3010へ戻る。移動を続けてはいけない場合はS3060に行く。S3060では、移動を続けられない旨の表示を行う。警告は図20の警告発生部51において発する。この警告は、音声による警告や、発光体の点滅や、画面への表示やプリンターの出力などである。S3070では、判定部40の移動を続けてはいけない旨の判定結果を、船舶200の移動体移動制御部が入力する。この入力を受けて船舶200の移動体移動制御部60が船舶200の移動を制御する。
【0044】
以上のように実施の形態3における情報端末300は、地図情報を受信する地図情報受信部80を備えたことを特徴とする。
【0045】
このため、地図情報記憶部20では対応しきれない時刻とともに変化する海水面情報や、工事により形状が変化した場合の港の形状をリアルタイムで情報として受信し、入手できる利点がある。また、地図情報記憶部30にあらかじめ記憶しておくのに適さないような局地的な詳細な地図情報を入手することに適している。
また、従来の技術においては準天頂衛星を用いた高精度測位が十分提供されておらず、自船情報としては自船の寸法として自船の全長を用いるに過ぎないため、数十メートル〜少なくとも数メートルの精度程度であった。そのため、従来技術においては、精度が制限されていたために、誤差が25cmクラスに合う地図情報などは配信されていない。準天頂衛星100を用いた高精度測位に係る本実施の形態3においては、地上局400は測位誤差25cmレベルの高精度測位に対応する詳細な地図情報を配信し、情報端末300の地図情報受信部80が前記詳細な地図情報を受信し、誤差25cmクラスの高精度な測位を可能にする。船舶では詳細な地図情報の配信については上記のようになるが、他の移動体、例えば、車両の場合については、DSRC(Dedicated Short Range Communication、狭域無線通信)、または、地上波デジタル受信機、携帯電話等を使用することができる。
さらに、地図情報については次の場合も考えられる。すなわち、地図情報記憶部20は粗い地図情報を持つものとする。一方、地上局400は、この粗い地図情報と同じ地域あるいは同じ部分に関する詳細な地図情報を有するものとし、これを地上局400は送信し、地図情報受信部80は前記詳細地図情報を受信する。判定部40は、前記の地図情報記憶部20の有する粗い地図情報と、前記受信した地上局400の送信した詳細な地図情報とを入力する。判定部40は入力した前記粗い地図情報に前記詳細な地図情報を組み込む情報の加工を行う。この加工により新たに地図情報を作成し、判定の材料とする。たとえば、詳細な地図情報については、サービスとして船舶に配信してもよい。各地上局は、各地上局のサービス範囲の詳細な地図情報を有しており、これを船舶向けに配信してもよい。船舶のほうでは、測位の結果に基づき、各地上局が配信する詳細な地図情報のうちから、自己の船舶に必要な地上局配信の詳細な地図情報を選択して利用すればよい。
なお、地図情報記憶部20に記憶している地図情報は、使用後に不要となれば消去が可能である。同様に地図情報受信部80の受信した地図情報についても、使用後に不要となれば消去が可能である。また、前記の粗い地図情報と詳細な地図情報とから新たに作成した地図情報についても、使用後に不要となれば消去が可能である。
【0046】
以上のように、実施の形態3における上記情報端末は、例えば実施の形態1と同様の測位システムにさらに、地図情報を送信する地上局、衛星、他の移動体を加えた測位システムで用いられるものである。すなわち、上記説明したように、上記測位システムは、地図情報を送信する地上局、衛星、他の移動体等と、固定点として自己の基準位置を有し隣接するどうしで一つのメッシュを形成し測位補正情報を測位情報配信センターに局に出力する電子基準点と、前記電子基準点より測位補正情報を入力し入力した測位補正情報を収集、統合して収集統合情報を作成し、所定のアンテナを介して準天頂衛星100等に送信する測位情報配信センターと、1機の準天頂衛星と3機のGPS衛星との組み合わせ、1機の準天頂衛星と3機の静止衛星との組み合わせ、或いは、1機の準天頂衛星と、GPS衛星とMTSATとによる3機の衛星との組み合わせ、すなわち、少なくとも準天頂衛星を含む4機の衛星群(4機以上の衛星群でも構わない)と、前記衛星群から受信した信号をもとに位置を測位する情報端末を備えた移動体(一例として船舶)とから構成される。
そして、上記システムで用いられる情報端末は、
移動体に装備される情報端末であって、
GPS(グローバル・ポジショニング・システム)衛星からの電波を受信し前記情報端末の位置を測位して測位位置を出力するGPS測位部と、
少なくとも前記移動体の形状を示す形状情報と前記移動体に装備される情報端末の移動体への配置箇所を示す配置情報とを含む前記移動体に関する特性情報を記憶する特性情報記憶部と、
地図情報を受信する地図情報受信部と、
前記GPS測位部が出力した前記情報端末の測位位置と前記特性情報記憶部が記憶した前記特性情報のうち移動体の形状情報と情報端末の配置情報と前記地図情報受信部が受信した地図情報とを入力し、入力した前記移動体の形状情報と情報端末の配置情報と前記情報端末の測位位置とから現在の移動体の存在範囲を認識し、前記認識した現在の移動体の存在範囲と入力した前記地図情報受信部が受信した地図情報とに基づいて、前記移動体の移動の可否を判定する判定部と
を備えたことを特徴とする。
【0047】
実施の形態4.
実施の形態4は、実施の形態1に対して、他移動体情報受信部が他の移動体の情報を受信して、判定部40が他の移動体の情報をも考慮して船舶200の移動の可否を判定する点に特徴がある。
図25は実施の形態4における情報端末300の構成を示す図である。図25は実施の形態3の構成を示す図20において地図情報受信部80が、他移動体情報受信部82となっている点が異なる。
【0048】
図25において他移動体情報受信部82は、例えば船舶200とは別の船舶の情報を受信する。受信する情報は、地上局が送信する情報、準天頂衛星100やGPS衛星500が送信する情報、他の船舶自信あるいはその他の移動体が送信する場合すべてを含む。図21では船舶200と他の船舶210を描いている。例えば先の図21図で説明すると、図21においては、船舶200は、他の船舶210が他の船舶210自身の他移動体情報を発信している情報を受信し、また、地上局400や、準天頂衛星等の衛星の送信する他移動体情報を受信しているとみることもできる。図26は他の船舶210が発信する他移動体情報の例である。他の船舶210は、例えば実施の形態2における送信部70を備えた情報端末300を装備していてもよい。例えば実施の形態2における送信部70を備えた情報端末300を装備している場合、他の船舶210は図26に示すように1.自己の存在範囲,2.GPSの測位位置(三次元情報)、3.情報端末300の船舶210への配置箇所を示す配置情報(三次元情報)、4.船舶210の進行方向、5.船舶210の進行速度、6.船舶210の航路、7.船舶210の船首、船尾方向などを船舶210自身の他移動体情報として送信する。
【0049】
以下に、他の船舶210の送信した前記他移動体情報を船舶200が受信した場合の動作を図27を用いて説明する。
【0050】
まず、S4010では、GPS測位部10がGPS情報及びディファレンシャル補正情報に基づき測位する。実施の形態1と同様である。そして、S4020では、他移動体情報受信部82が船舶210の送信した他移動体情報を受信する。S4030では、判定部40は他移動体情報受信部82の受信した船舶210の他移動体情報、地図情報記憶部20の有する地図情報、GPS測位部の測位した測位位置情報、船舶200の形状情報と情報端末の配置情報を入力する。S4040では判定部40が船舶200と他移動体である船舶210を認識する。船舶200については、判定部40は実施の形態1と同様に、船舶200の存在範囲を認識する。船舶210については、船舶210の他移動体情報の中に船舶210の存在範囲が含まれている。この両者から、判定部40は船舶200と船舶210の存在範囲を認識する。なお船舶210の存在範囲は他の移動体の位置情報の一例である。S4060では、判定部40が判定をする。図18を用いて船舶200と他の船舶210の関係を説明する。図18は、判定部40が船舶200の存在範囲を認識し、また船舶210の他移動体情報を受信して、両者の関係を認識して判定をしようとする場合を示すものとする。他の船舶200の情報端末300の判定部40は、両者の存在範囲を認識しているので、船舶200の外部形状上の任意の点C(X1、Y1、Z1)、と他の船舶210の外部形状上の任意の点D(X2、Y2、Z2)を認識している。これにより、これらの座標からC〜D間の距離L1が計算できる。あらゆる船舶200上の点C(X1、Y1、Z1)とあらゆる他の船舶210上の点D(X2、Y2、Z2)との間の距離L1を求める。L1が所定の距離L2以下の場合、判定部40は船舶200が移動を続けてはいけないと判定する。計算距離L1が所定の距離L2を超える場合は、判定部40は船舶200が移動を続けてもよいと判定する。ここに判定の基準となるL2は、例えば、船舶の大きさ、重量、速度、動力性能などから決定してもよい。基準となる判定値L2に対して、準天頂衛星100を用いた高精度測位によれば、誤差25cmレベルでL2をより短いかどうか判定が可能である。船舶200においては、判定値L2は、通常では数十メートル〜少なくとも数メートル程度であるから、判定値L2に対しては誤差25cmレベルの高精度な判定が可能となる。判定部40は、まず判定結果によらず、表示部52へ船舶200、他の船舶210の情報を出力する。表示部52は例えばディスプレイを有しており、図18の状態をディスプレイに表示する。他の船舶210の送信情報には、図26に示すような情報が含まれるから、判定部40は船舶200自身の他、情報を送信する他の船舶210の形状、進行方向、速度等を図18のように表示することが可能である。判定が移動を続けてもよい旨の判定をした場合にはS4010へ戻る。判定部40が、移動を続けるべきではないと判定した場合はS4070へ進む。S4070では、その結果を警告発生部51に出力する。警告発生部51は、その入力に従い警告を発する。音声により警告を発してもよいし、画面に警告を表示してもよいし、発光体を点滅させる警告でもよいし、プリンターに警告を出力しても構わない。S4080では、判定部40は移動を続けてはいけない旨の判定結果を船舶200の移動体移動制御部60に出力する。この判定結果を入力した前記移動体移動制御部60は、船舶200の移動を停止し、あるいは移動を変更する制御を行う。
【0051】
以上のように、実施の形態4における上記情報端末は、例えば実施の形態1と同様の測位システムにさらに、他移動体情報を送信する他移動体、地上局、衛星等を加えた測位システムで用いられるものである。すなわち、上記説明したように、上記測位システムは、他移動体情報を送信する他移動体、地上局、衛星等と、固定点として自己の基準位置を有し隣接するどうしで一つのメッシュを形成し測位補正情報を測位情報配信センターに局に出力する電子基準点と、前記電子基準点より測位補正情報を入力し入力した測位補正情報を収集、統合して収集統合情報を作成し、所定のアンテナを介して準天頂衛星100等に送信する測位情報配信センターと、1機の準天頂衛星と3機のGPS衛星との組み合わせ、1機の準天頂衛星と3機の静止衛星との組み合わせ、或いは、1機の準天頂衛星と、GPS衛星とMTSATとによる3機の衛星との組み合わせ、すなわち、少なくとも準天頂衛星を含む4機の衛星群(4機以上の衛星群でも構わない)と、前記衛星群から受信した信号をもとに位置を測位する情報端末を備えた移動体(一例として船舶)とから構成される。
そして、上記システムで用いられる情報端末は、
移動体に装備される情報端末であって、
GPS(グローバル・ポジショニング・システム)衛星からの電波を受信し前記情報端末の位置を測位して測位位置を出力するGPS測位部と、
少なくとも前記移動体の形状を示す形状情報と前記移動体に装備される情報端末の移動体への配置箇所を示す配置情報とを含む前記移動体に関する特性情報を記憶する特性情報記憶部と、
地図情報を記憶する地図情報記憶部と、
他の移動体が送信した他の移動体の位置情報を受信する受信部と、
前記GPS測位部が出力した前記情報端末の測位位置と前記特性情報記憶部が記憶した前記特性情報のうち移動体の形状情報と情報端末の配置情報と前記地図情報記憶部が記憶した地図情報と前記受信部が受信した他の移動体が送信した送信情報とを入力し、入力した前記移動体の形状情報と情報端末の配置情報と前記情報端末の測位位置とから現在の移動体の存在範囲を認識し、前記認識した現在の移動体の存在範囲と入力した前記地図記憶部が記憶した地図情報と前記受信部が受信した他の移動体の位置情報とに基づいて、前記情報端末を装備する移動体の移動の可否を判定する判定部と
を備えたことを特徴とする。
【0052】
実施の形態4は、他移動体情報受信部備える。
【0053】
実施の形態4は、他移動体情報受信部備えるので他の船舶の航行の状況を確認し、航行できるので、特に湾内航行の安全、迅速化を図ることができる。
【0054】
実施の形態5.
図28から図32により実施の形態5を説明する。図28は実施の形態5における情報端末300の構成を示す図である。図28の情報端末300は、複数のGPS測位部310〜350を備えたことを特徴とする。GPS測位部320〜350はGPS測位部310と同じ構成である。情報端末300は、複数のGPS測位部310〜350、地図情報記憶部20、移動体特性情報記憶部30、判定部40、判定結果出力部50とから構成される。複数のGPS測位部310〜350は、GPS情報受信部11、位置計算部12、ディファレンシャル補正情報受信部13から構成される。図29は情報端末300の処理を行うフローチャートである。
【0055】
実施の形態1で述べたように、GPS測位部が複数ある場合は、判定部40は船舶200の存在範囲を、姿勢までも含めて詳細に特定できる。このことは、特に、接岸支援や座礁を避けるために効果がある。
【0056】
図28の判定部40は、GPS測位部310〜350の各々について所定の範囲を判定する。図30により判定部40の判定方法を説明する。図30はGPS測位部10を5箇所有する船舶200が港600に入港し接岸する場合を示している。この接岸する場合を例に説明する。
【0057】
図30の船舶200において情報端末300の各GPS測位部310〜350は、それぞれGPS情報受信部11でGPS情報を受信し、ディファレンシャル補正情報受信部13でディファレンシャル補正情報を受信し、位置計算部12が前記GPS情報とディファレンシャル補正情報を入力して測位位置を計算する。GPS測位部310〜350は、それぞれ測位位置を判定部40へ出力する。判定部40は移動体特性情報記憶部30から船舶200の移動体特性情報のうち形状情報と情報端末300の配置情報とを入力し、地図情報記憶部20から港600に関する地図情報を入力する。また、GPS測位部310〜350の測位位置を入力する。判定部40はGPS測位部310〜350が測位した測位位置ごとに、船舶200の現在の存在範囲を認識する。図30をもとに説明する。判定部40は、GPS測位部310〜350ごとに、船舶200の移動の可否を判定する。判定部40はGPS測位部310の測位位置について311の範囲を判定し、測位部320の測位位置については321の範囲を判定し、測位部330の測位位置については331の範囲を判定し、測位部340の測位位置については341の範囲を判定し、測位部350の測位位置については351の範囲を判定する。判定範囲311について説明する。判定部40は範囲311についての船舶200の存在範囲を認識する。判定部40は、範囲311について、GPS測位部310の測位位置に基づき、船舶200の存在範囲を認識し、この認識に基づいて船舶200が、そのまま移動を続けてよいかどうかを判定する。以下に判定の例を示す。図30において、判定部40は、認識した範囲311についての船舶200の外部形状上に、任意の点E(X3、Y3、Z3)を設ける。また判定部40が入力した地図情報により接岸する港600を示す形状上のうち、範囲311において任意の点であるF(X4、Y4、Z4)をとる。これらの点からEF間の距離L3を計算する。範囲311についてあらゆる船舶200の外部形状上の点E(X3、Y3、Z3)とあらゆる範囲311における地図情報の点F(X4、Y4、Z4)との間の距離L3を求める。L3が所定の距離L4以下の場合は、判定部40は船舶200が移動を続けてはいけないと判定する。L3がL4よりも長い場合は、判定部40は船舶200が移動を続けてもよいと判定する。ここに判定の基準となるL4は、例えば、船舶の大きさ、重量、速度、動力性能などから決定してもよい。その他のGPS測位部320〜350についてもGPS測位部310と同様である。判定値L4に対して、準天頂衛星100を用いた高精度測位によれば、誤差25cmレベルでの判定が可能である。船舶200の場合、判定値L4は数十メートル〜少なくとも数メートルであるから、L4に対しては誤差25cmレベルの高精度な判定が可能となる。また、各測位部310〜350について判定部は、各範囲ごとに船舶200の各部を認識し、上記L3を計算して判定するのでので、迅速な計算処理が可能である。判定部40は、GPS測位部310〜350の測位位置にもとづく判定のいずれもが船舶200が移動を続けてもよいと判定した場合、各測位部310〜350で測位を行う。判定部40が、GPS測位部310〜350の測位位置にもとづく判定のいずれか一つが、船舶200が移動を続けてはならないと判断した場合は、判定結果出力部50へその判定を出力する。判定結果出力部50は船舶200が移動してはならない判定を入力し、警告を発する。この警告は、音声による警告や、発光体の点滅や、画面への警告表示やプリンターへのの警告の出力などがある。
判定部40は船舶200が移動を続けてはならない旨の判定を船舶200の移動体移動制御部60へ出力する。移動体移動制御部60は前記の判定を入力し船舶200に対して航行の中止等、所定の制御を行う。
【0058】
図29に情報端末300が行う処理のフローチャートを示す。
【0059】
図31は実施の形態5における別の構成を示す図である。図31は、図28の構成に対して、GPS測位部10が測位装置94となっており、測位装置94はGPS測位部310〜350に対して地図情報記憶部20と処理部90とを備えた構成である。処理の流れは上記した図28の構成の場合と同じである。
【0060】
図32は実施の形態5におけるさらに別の構成を示す図である。図32は、判定部40だけがひとつであって、図28の構成に対して、GPS測位部10が測位装置96となっており、測位装置96はGPS測位部310〜350に対して、地図情報記憶部20と移動体特性情報記憶部30と処理部90とを備えた構成である。GPS測位部10、地図情報記憶部20、移動体特性情報記憶部30及び処理部90をひとつのまとまりとする測位装置96が複数ある構成である。処理の流れは上記した図28の構成の場合と同じである。
【0061】
以上、実施の形態では船舶を例に説明したが、船舶に限ることはなく、他の移動体に装備する場合であっても構わない。
【0062】
以上のように、実施の形態5における上記情報端末は、例えば実施の形態1と同様の測位システムで用いられるものである。すなわち、上記説明したように、上記測位システムは、固定点として自己の基準位置を有し隣接するどうしで一つのメッシュを形成し測位補正情報を測位情報配信センターに局に出力する電子基準点と、前記電子基準点より測位補正情報を入力し入力した測位補正情報を収集、統合して収集統合情報を作成し、所定のアンテナを介して準天頂衛星100等に送信する測位情報配信センターと、1機の準天頂衛星と3機のGPS衛星との組み合わせ、1機の準天頂衛星と3機の静止衛星との組み合わせ、或いは、1機の準天頂衛星と、GPS衛星とMTSATとによる3機の衛星との組み合わせ、すなわち、少なくとも準天頂衛星を含む4機の衛星群(4機以上の衛星群でも構わない)と、前記衛星群から受信した信号をもとに位置を測位する情報端末を備えた移動体(一例として船舶)とから構成される。
そして、上記システムで用いられる情報端末は、
移動体に装備される情報端末であって、
GPS(グローバル・ポジショニング・システム)衛星からの電波を受信し位置を測位して測位位置をそれぞれ出力する複数のGPS測位部と、
前記複数のGPS測位部によりそれぞれ出力された前記測位位置に基づいて前記移動体の移動の可否を判定する判定部と
を備えたことを特徴とする。
【0063】
上記各実施の形態において、準天頂衛星を用いた、高精度測位が可能な情報端末を備えた船舶(移動体の例)については、座礁や湾内における衝突事故等に関する損害保険に加入する場合、割引を受けられるというビジネスモデルが考えられる。
【0064】
ビジネスモデルとして、契約した船舶にのみ実施の形態3のような、地上局等が送信する詳細な地図情報の受信機能を備えた情報端末を配布し、契約した一定期間につき料金を徴収するシステムが考えられる。また、地図情報を受信できる端末を装備した船舶等については安全性が向上するので、契約による情報端末の配布に加えて、損害保険を割り引くサービスを付加するビジネスモデルも考えられる。
【0065】
【発明の効果】
本発明によれば、移動体の詳細な形状を考慮しているため、高精度の船舶の接岸支援が可能である。特に25cmレベルの誤差範囲であることより、接岸時の接岸間際の支援に効果がある。
【0066】
本発明によれば、効率的な湾内の管理支援が可能である。特に航路が設定されている場合に、25cmレベルの誤差範囲であることより高精度な運行管理が可能である。
【0067】
本発明によれば、自己の存在範囲を送信する送信部を備えているので、これを受信する他の移動体の移動の安全性を向上することができる。
【0068】
本発明によれば、詳細な地図情報をリアルタイムで入手できるため、船舶等の航行の安全性を高めることができる。
【0069】
本発明によれば、他の移動体の情報として相対的な大きさをも入手することができるので、船舶等の航行の安全を高めることができる。
【0070】
本発明によれば船舶の接岸の迅速化を図ることにより、燃料、人件費等のコスト低減を図ることができる。
【0071】
本発明によれば船舶等の移動体の姿勢を容易に確認できる。
【0072】
本発明によれば、複数のGPS測位部を備えGPS測位部ごとに移動体の移動の可否を判定することで、判定の迅速化を図ることができる。
【図面の簡単な説明】
【図1】準天頂衛星を利用した測位システムの構成を示す図である。
【図2】情報端末を装備した船舶の入港を示す図である。
【図3】実施の形態1における構成を示す図である。
【図4】準天頂衛星を利用した測位システムの構成を示す図である。
【図5】地図情報記憶部が記憶する地図情報の例を示す図である。
【図6】移動体特性情報記憶部が記憶する移動体特性情報の例を示す図である。
【図7】存在範囲が定まらない場合を示す図である。
【図8】GPS測位部を2箇所有する場合を示す図である。
【図9】船舶のピッチング状態を示す図である。
【図10】GPS測位部を2箇所全幅方向に有する場合を示す図である。
【図11】GPS測位部を3箇所有する場合を示す図である。
【図12】船舶のロールを示す図である。
【図13】判定部の判定の様子を示す図である。
【図14】船舶が設定航路を航行する場合を示す図である。
【図15】実施の形態1が行う処理を示すフローチャートである。
【図16】実施の形態2における構成を示す図である。
【図17】船舶が送信する場合を示す図である。
【図18】他移動体情報を受信した場合を示す図である。
【図19】実施の形態2における情報端末が行う処理を示すフローチャートである。
【図20】実施の形態3における構成を示す図である。
【図21】船舶が地図情報を受信する場合を示す図である。
【図22】ブイが地上局へ情報を送信する場合を示す図である。
【図23】船舶が発信機の信号を受信して入港する場合を示す図である。
【図24】実施の形態3における情報端末が行う処理を示すフローチャートである。
【図25】実施の形態4における構成を示す図である。
【図26】他の船舶が送信する他移動体情報の例を示す図である。
【図27】実施の形態4における情報端末が行う処理を示すフローチャートである。
【図28】実施の形態5における構成を示す図である。
【図29】実施の形態5における情報端末が行う処理を示すフローチャートである。
【図30】実施の形態5における情報端末を装備する船舶の接岸を示す図である。
【図31】実施の形態5における別の構成を示す図である。
【図32】実施の形態5におけるさらに、別の構成を示す図である。
【図33】従来の技術を示す図である。
【図34】従来の技術を示す図である。
【図35】従来の技術を示す図である。
【符号の説明】
10 GPS測位部、11 GPS情報受信部、12 位置計算部、13 ディファレンシャル補正情報受信部、20 地図情報記憶部、30 移動体特性情報記憶部、40 判定部、50 判定結果出力部、51 警告発生部、52 表示部、60 移動体移動制御部、70 送信部、80 地図情報受信部、82 他移動体情報受信部、90 処理部、94,96 測位装置、100 準天頂衛星、150 MTSAT(静止衛星の一例)、200 船舶(移動体の例)、210 他の船舶、300 情報端末、310,320,330,340,350GPS測位部、311,321,331,341,351 GPS測位部の測位範囲、400 地上局、404 船舶、410 海域情報表示装置、500 GPS衛星、530 航路、600 港、610 陸上、660 ケーブル、690 接岸箇所、700 ブイ、800 海底形状。
Claims (5)
- 移動体に装備される情報端末であって、
GPS(グローバル・ポジショニング・システム)衛星からの電波を受信し前記情報端末の位置を測位して測位位置を出力するGPS測位部と、
少なくとも前記移動体の形状を示す形状情報と前記移動体に装備される情報端末の移動体への配置箇所を示す配置情報とを含む前記移動体に関する特性情報を記憶する特性情報記憶部と、
地図情報を記憶する地図情報記憶部と、
前記GPS測位部が出力した前記情報端末の測位位置と前記特性情報記憶部が記憶した前記特性情報のうち移動体の形状情報と情報端末の配置情報と前記地図情報記憶部が記憶した地図情報とを入力し、入力した前記移動体の形状情報と情報端末の配置情報と前記情報端末の測位位置とから現在の移動体の存在範囲を認識し、前記認識した現在の移動体の存在範囲と入力した前記地図情報とに基づいて、前記移動体の移動の可否を判定する判定部と
を備えたことを特徴とする移動体の情報端末。 - 移動体に装備される情報端末であって、
GPS(グローバル・ポジショニング・システム)衛星からの電波を受信し前記情報端末の位置を測位して測位位置を出力するGPS測位部と、
少なくとも前記移動体の形状を示す形状情報と前記移動体に装備される情報端末の移動体への配置箇所を示す配置情報とを含む前記移動体に関する特性情報を記憶する特性情報記憶部と、
前記GPS測位部が出力した前記情報端末の測位位置と前記特性情報記憶部が記憶した前記特性情報のうち移動体の形状情報と情報端末の配置情報とを入力し、入力した前記移動体の形状情報と情報端末の配置情報と前記情報端末の測位位置とから現在の移動体の存在範囲を認識する認識部と、
前記認識部が認識した現在の移動体の存在範囲を送信する送信部と
を備えたことを特徴とする移動体の情報端末。 - 移動体に装備される情報端末であって、
GPS(グローバル・ポジショニング・システム)衛星からの電波を受信し前記情報端末の位置を測位して測位位置を出力するGPS測位部と、
少なくとも前記移動体の形状を示す形状情報と前記移動体に装備される情報端末の移動体への配置箇所を示す配置情報とを含む前記移動体に関する特性情報を記憶する特性情報記憶部と、
地図情報を受信する地図情報受信部と、
前記GPS測位部が出力した前記情報端末の測位位置と前記特性情報記憶部が記憶した前記特性情報のうち移動体の形状情報と情報端末の配置情報と前記地図情報受信部が受信した地図情報とを入力し、入力した前記移動体の形状情報と情報端末の配置情報と前記情報端末の測位位置とから現在の移動体の存在範囲を認識し、前記認識した現在の移動体の存在範囲と入力した前記地図情報受信部が受信した地図情報とに基づいて、前記移動体の移動の可否を判定する判定部と
を備えたことを特徴とする移動体の情報端末。 - 移動体に装備される情報端末であって、
GPS(グローバル・ポジショニング・システム)衛星からの電波を受信し前記情報端末の位置を測位して測位位置を出力するGPS測位部と、
少なくとも前記移動体の形状を示す形状情報と前記移動体に装備される情報端末の移動体への配置箇所を示す配置情報とを含む前記移動体に関する特性情報を記憶する特性情報記憶部と、
地図情報を記憶する地図情報記憶部と、
他の移動体が送信した他の移動体の位置情報を受信する受信部と、
前記GPS測位部が出力した前記情報端末の測位位置と前記特性情報記憶部が記憶した前記特性情報のうち移動体の形状情報と情報端末の配置情報と前記地図情報記憶部が記憶した地図情報と前記受信部が受信した他の移動体が送信した送信情報とを入力し、入力した前記移動体の形状情報と情報端末の配置情報と前記情報端末の測位位置とから現在の移動体の存在範囲を認識し、前記認識した現在の移動体の存在範囲と入力した前記地図記憶部が記憶した地図情報と前記受信部が受信した他の移動体の位置情報とに基づいて、前記情報端末を装備する移動体の移動の可否を判定する判定部と
を備えたことを特徴とする移動体の情報端末。 - 移動体に装備される情報端末であって、
GPS(グローバル・ポジショニング・システム)衛星からの電波を受信し位置を測位して測位位置をそれぞれ出力する複数のGPS測位部と、
前記複数のGPS測位部によりそれぞれ出力された前記測位位置に基づいて前記移動体の移動の可否を判定する判定部と
を備えたことを特徴とする移動体の情報端末。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002166560A JP3926680B2 (ja) | 2002-06-07 | 2002-06-07 | 移動体の情報端末 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002166560A JP3926680B2 (ja) | 2002-06-07 | 2002-06-07 | 移動体の情報端末 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004012311A true JP2004012311A (ja) | 2004-01-15 |
| JP3926680B2 JP3926680B2 (ja) | 2007-06-06 |
Family
ID=30434069
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002166560A Expired - Fee Related JP3926680B2 (ja) | 2002-06-07 | 2002-06-07 | 移動体の情報端末 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3926680B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005315721A (ja) * | 2004-04-28 | 2005-11-10 | Tv Asahi Corp | 位置表示システム |
| KR20170102992A (ko) * | 2015-01-15 | 2017-09-12 | 난징 유니버시티 파이브디 테크놀로지 컴퍼니 리미티드 | 선박 보조 도킹 방법과 시스템 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06325300A (ja) * | 1993-05-11 | 1994-11-25 | Tokimec Inc | 船舶の航行支援システム |
| JPH07128082A (ja) * | 1993-11-04 | 1995-05-19 | Kaijo Corp | 船舶の対岸壁位置測定装置 |
| JPH1062202A (ja) * | 1996-08-14 | 1998-03-06 | N T T Data Tsushin Kk | 船舶用ナビゲーションシステム |
| JPH1089999A (ja) * | 1996-09-13 | 1998-04-10 | Hitachi Zosen Corp | 船舶の入出渠時における誘導装置および誘導方法 |
| JPH1138872A (ja) * | 1997-07-17 | 1999-02-12 | Toyota Motor Corp | 地図データ配信システム、およびそのシステムに適する地図データ取得装置 |
| JP2000009820A (ja) * | 1998-06-19 | 2000-01-14 | Nec Radio Equipment Eng Ltd | 移動体接触位置検出装置 |
| JP2000182199A (ja) * | 1998-12-21 | 2000-06-30 | Mitsubishi Electric Corp | 船舶航路監視システム |
| JP2002062144A (ja) * | 2000-08-23 | 2002-02-28 | Matsushita Electric Ind Co Ltd | 移動体通信装置 |
-
2002
- 2002-06-07 JP JP2002166560A patent/JP3926680B2/ja not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06325300A (ja) * | 1993-05-11 | 1994-11-25 | Tokimec Inc | 船舶の航行支援システム |
| JPH07128082A (ja) * | 1993-11-04 | 1995-05-19 | Kaijo Corp | 船舶の対岸壁位置測定装置 |
| JPH1062202A (ja) * | 1996-08-14 | 1998-03-06 | N T T Data Tsushin Kk | 船舶用ナビゲーションシステム |
| JPH1089999A (ja) * | 1996-09-13 | 1998-04-10 | Hitachi Zosen Corp | 船舶の入出渠時における誘導装置および誘導方法 |
| JPH1138872A (ja) * | 1997-07-17 | 1999-02-12 | Toyota Motor Corp | 地図データ配信システム、およびそのシステムに適する地図データ取得装置 |
| JP2000009820A (ja) * | 1998-06-19 | 2000-01-14 | Nec Radio Equipment Eng Ltd | 移動体接触位置検出装置 |
| JP2000182199A (ja) * | 1998-12-21 | 2000-06-30 | Mitsubishi Electric Corp | 船舶航路監視システム |
| JP2002062144A (ja) * | 2000-08-23 | 2002-02-28 | Matsushita Electric Ind Co Ltd | 移動体通信装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005315721A (ja) * | 2004-04-28 | 2005-11-10 | Tv Asahi Corp | 位置表示システム |
| JP4637500B2 (ja) * | 2004-04-28 | 2011-02-23 | 株式会社テレビ朝日 | 位置表示システム |
| KR20170102992A (ko) * | 2015-01-15 | 2017-09-12 | 난징 유니버시티 파이브디 테크놀로지 컴퍼니 리미티드 | 선박 보조 도킹 방법과 시스템 |
| JP2018503915A (ja) * | 2015-01-15 | 2018-02-08 | 江▲蘇▼南大五▲維▼▲電▼子科技有限公司 | 船舶補助ドッキング方法およびシステム |
| KR102049371B1 (ko) * | 2015-01-15 | 2020-01-22 | 난징 유니버시티 파이브디 테크놀로지 컴퍼니 리미티드 | 선박 보조 도킹 방법과 시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP3926680B2 (ja) | 2007-06-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102472524B1 (ko) | 환경의 적어도 일부에 대한 가상 표현 결정 | |
| JP4716214B2 (ja) | 船舶の入出港離着桟支援方法およびシステム | |
| US20060064242A1 (en) | Navigation assistance method and system | |
| US20110313655A1 (en) | Navigation assistance method and system | |
| JPH08504944A (ja) | 可動の無人水中ビークルをモニタおよび遠隔制御する方法と装置 | |
| JP2006313087A (ja) | 水中航走体の検出位置修正方法およびシステム | |
| KR20170023534A (ko) | 해양 내비게이션 장치 및 항로 제공 방법 | |
| KR100981990B1 (ko) | 부표를 이용한 연안 선박의 위치 및 궤적 추정을 통한 안전관제장치 및 그 방법 | |
| JP3763004B1 (ja) | 航空機進出入路付近の船舶監視システム、及び航空機進出入路付近の船舶監視方法 | |
| JP2004212192A (ja) | 操船支援システム、操船支援プログラムおよび操船支援のための三次元像生成方法 | |
| JP2007207134A (ja) | 海上構造物付近の海上移動体監視システム、及び海上構造物付近の海上移動体監視方法 | |
| JP3926680B2 (ja) | 移動体の情報端末 | |
| CN117073676A (zh) | 一种基于差分北斗信息与视觉结合的靠泊辅助系统 | |
| CN104554651B (zh) | 船舶最大允许航速设定装置 | |
| CN104554652B (zh) | 一种避免船舶事故的发生的方法 | |
| JP3851958B1 (ja) | 海面下存在物付近の海上移動体監視システム、及び海面下存在物付近の海上移動体監視方法 | |
| JP3313137B2 (ja) | 落水者捜索支援システム | |
| JPH10206178A (ja) | 移動体の誘導システム | |
| RU2260191C1 (ru) | Навигационный комплекс высокоскоростных судов | |
| JP3689744B1 (ja) | 航空機進出入路付近の船舶監視システム、及び航空機進出入路付近の船舶監視方法 | |
| WO2024034434A1 (ja) | 船舶と通信を行う船舶用スマートポール、船舶通信接続装置及び船舶通信接続システム | |
| KR102428886B1 (ko) | 선박 운항 지원 시스템 및 이를 포함하는 선박 | |
| CN104648629A (zh) | 一种避免船舶事故的发生的方法 | |
| CN114935777A (zh) | 一种基于差分技术的无人艇回收引导方法 | |
| Tsukioka et al. | Capabilities of the Homing Sonar On the Autonomous Underwater Vehicle “Urashima” |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20040519 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20041025 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060329 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060411 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060518 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060919 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061012 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070227 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070228 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |