JP2004012302A - 膜厚分布計測方法及びその装置 - Google Patents
膜厚分布計測方法及びその装置 Download PDFInfo
- Publication number
- JP2004012302A JP2004012302A JP2002166460A JP2002166460A JP2004012302A JP 2004012302 A JP2004012302 A JP 2004012302A JP 2002166460 A JP2002166460 A JP 2002166460A JP 2002166460 A JP2002166460 A JP 2002166460A JP 2004012302 A JP2004012302 A JP 2004012302A
- Authority
- JP
- Japan
- Prior art keywords
- film thickness
- sample
- film
- thickness distribution
- spectral waveform
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












Abstract
【課題】CMP加工後、膜厚を計測し面内膜厚分布を求める際、試料上の測定個所及び、特定パターンの位置決めすることなしに高速に膜厚分布を求める。
【解決手段】CMP加工後、膜厚を計測する際、試料を移動し、移動中の試料からの反射光の分光波形を連続的に検出することにより、短時間で比較的詳細な試料面内の膜厚分布を求める。又、ウェハにおけるチップのように試料上の局所的領域でパターンの密度等による膜厚分布が生じる場合、区分領域毎に分光波形を連続的に検出し、その区分領域を代表する膜厚値を求め、区分領域の膜厚を基に試料全面の膜厚分布を求める。得られた膜厚分布を基に次の試料のCMP加工条件を設定することにより、CMP加工の膜厚の均一性を図れる。
【選択図】 図1
【解決手段】CMP加工後、膜厚を計測する際、試料を移動し、移動中の試料からの反射光の分光波形を連続的に検出することにより、短時間で比較的詳細な試料面内の膜厚分布を求める。又、ウェハにおけるチップのように試料上の局所的領域でパターンの密度等による膜厚分布が生じる場合、区分領域毎に分光波形を連続的に検出し、その区分領域を代表する膜厚値を求め、区分領域の膜厚を基に試料全面の膜厚分布を求める。得られた膜厚分布を基に次の試料のCMP加工条件を設定することにより、CMP加工の膜厚の均一性を図れる。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は光学的に透明な膜の厚さ及び厚さ分布の計測及び膜厚を管理して、半導体デバイスを製造する方法に関し、特に、半導体デバイスの製造ラインで、成膜後、表面の平坦化処理工程において、ウェハの表面膜厚を計測する方法、及び膜厚を計測することにより平坦化処理工程を管理して、半導体デバイスを製造する方法に関する。透明膜の例としては、シリコン等の半導体デバイスの他、DVD、TFT、LSIレチクル等の薄膜デバイスの製造工程におけるレジスト膜や絶縁膜等も含まれる。
【0002】
【従来の技術】
半導体デバイスは成膜、露光及びエッチング等の各プロセスを経て、素子及び配線パターンがシリコンウェハ上に形成され、製造される。近年、高精度化・高密度化を実現するために、素子及び配線パターンは微細化・多層化の方向に進んでいる。微細なパターンを多層形成すると、ウェハ表面の凹凸が増大し、微細なパターンを精度良く露光することが難しくなってくる。そのため、多層配線層を形成した上に保護膜、又は絶縁膜を形成したウェハ表面を、平坦化する方法が採用されている。
【0003】
この平坦化プロセスとして、化学的及び物理的作用により表面を研磨して平坦化するCMP(Chemical Mechanical Polishing)が用いられる。CMPは、当該技術分野において既知の加工方法である。
【0004】
CMP加工において重要な課題として、研磨レートの変動による加工終了後の残膜厚の精度低下や、加工面内の膜厚不均一性がある。そのため、CMP加工後、膜厚を計測し、計測結果を基に次のウェハのCMP加工の条件を変更したり、計測したウェハを再度、CMP加工できるようなin−line計測技術が必要となる。これまで、in−line計測技術として、種々の方法が提案されている。
【0005】
特開平9−109023号公報には、CMP装置の出口ステーションに装着された水中で膜厚計測が可能な、in−line計測システムが開示されている。特開平9−298175号公報ではCMP加工時の基板保持部をCMP加工後、複数のセンサを1次元的に配列したモニタユニットアレイ部に移動させ、試料を回転させ、水を介してウェハ全面の膜厚分布を求める方法が開示されている。又、特開平8−17768号公報では、CMP加工後、ウェハを吸着したホルダを光学センサ上に移動し、ウェハに可視光を照射して膜厚を求める方法が開示されている。又、特開平10−98016号公報では、計測部をCMP装置に組み込み、CMP加工後、湿式で膜厚を計測する方法が開示されている。
【0006】
【発明が解決しようとする課題】
CMP加工後、膜厚をin−line計測する場合、オフラインの膜厚計測装置と異なり、膜厚計測によりCMP装置のスループットが低下しないように、in−line膜厚計測時間はできるだけ小さくする必要がある。一方、計測結果の面内膜厚分布を基に次のウェハのCMP加工条件を変更するためには、ウェハ全面にわたりある程度詳細な膜厚分布が必要になる。一般に、CMPの研磨レートはパターン密度が高い領域で遅く、密度が低い領域で速い。従って、CMP加工後の膜厚はチップ内で配線、素子の密度の違いで場所によって大きく異なり、平坦性が問題となる。又、パターン密度の分布は各チップで同一のため、ウェハ上の各チップで同一の膜厚分布となる筈であるが、ウェハの周辺ではパターンが無い、あるいはCMP加工時のウェハホルダの加圧分布によりウェハ全面にわたって膜厚が異なり、ウェハ全面に関する均一性が問題となる。通常、CMP加工後の膜厚の均一性を評価する場合、ウェハ上の中心と周辺のチップを選択し、各チップの膜厚計測用の特定パターン上で膜厚を計測し、ウェハ上の膜厚分布を求めている。この場合、ある程度詳細な膜厚分布を求めるには膜厚計測点を多くする必要がある。しかし、通常の方法では、チップの位置決め、膜厚計測用パターンの位置決めを行う必要があり、計測点を増やすと計測時間が長くなり、in−line計測に適さなくなる。
【0007】
特開平9−109023号公報では、CMP加工後のウェハを洗浄、乾燥の工程の前に膜厚計測ができるため、その結果を短時間で次のウェハのCMP加工に反映できる。膜厚計測の方法は詳しく述べられていないが、チップ、及び、計測パターンを指定し、各計測点に位置決めすることによって膜厚を計測すると考えられ、計測点数が増えると計測時間がかかると予想される。特開平9−298175号公報では、複数のセンサを1次元的に配列したモニタユニットアレイに対し、試料を回転させることによって1回転で膜厚分布を求めることができる。しかし、各センサは、膜厚の計測点領域での平均値を計測するとしており、チップ内でパターン密度の違いで膜厚が異なる等、計測領域内で膜厚が大きく変化している場合、膜厚計測に誤差のでる可能性が高くなる。又、特開平8−17768号公報では、CMP加工後、ウェハを吸着したCMP加工用のホルダを光学センサ上に移動することによって膜厚を計測できるが、特定位置の膜厚を計測するためには位置決めする必要がある。膜厚分布に関して述べられていないが、膜厚分布を求めるために計測点数を多くすると、計測時間が長くなると予想される。又、特開平10−98016号公報では、CMP加工後のウェハ面内の膜厚分布を求めるため、中心と周辺部の各チップを選択し、画像認識装置により各チップの同一箇所を選定して膜厚を計測し、面内膜厚分布を求めている。これまでと同様、計測点数を増やすと計測点数に比例して計測時間が長くなる。
【0008】
以上、上記に開示されている方法は面内膜厚分布を求めるためにチップ、及びチップ上の計測用特定パターンに位置決めする必要がある。また、1次元センサに対しウェハを回転し、位置決めしない場合でも、1次元センサの各センサの計測点での局所的な膜厚の変化は考慮されていない。通常、CMP加工により平坦化を行った後でも、パターン密度の違いによって、局所的にも膜厚分布が生じ、その変化は場合によってはウェハ全域の膜厚分布と同程度となる。
【0009】
本発明の目的は、CMP加工後、試料表面からの反射光の分光波形に基づいて、膜厚を計測し面内膜厚分布を求める際、試料上の測定個所及び、特定パターンの位置決めすることなしに膜厚分布を求める膜厚計測方法及びその装置を提供することにある。又、ウェハにおけるチップのように試料上の局所的領域でパターンの密度等による膜厚分布が生じる場合でも、試料の局所的な膜厚分布とは別に試料全面にわたる膜厚分布を求める膜厚計測方法及びその装置を提供することにある。又、半導体デバイスの製造ラインで、成膜後、表面の平坦化処理工程において、CMP加工後、試料表面からの反射光の分光波形に基づいて、膜厚を計測し面内膜厚分布を求める際、試料上の測定個所あるいは、特定パターンの位置決めすることなしに膜厚分布を求め、得られた結果より、平坦化処理工程における次の試料の加工条件を変更し、更に平坦化処理工程以降の工程の加工条件に適用することによって、薄膜デバイスを製造する方法及びその製造装置を提供することにある。
【0010】
【課題を解決するための手段】
上記目的を達成するために、本発明はCMP加工後、膜厚を計測する際、試料を移動し、移動中の試料からの反射光の分光波形を連続的に検出し、試料全面の分光波形を検出して、試料面内の膜厚分布を求める。従来、試料からの分光波形に基づいてパターン上の膜厚を計測するには10〜20μm□と比較的大きなパターンを必要とし、膜厚計測用の特定パターンに位置決めする必要があった。本発明では分光波形の検出点におけるパターンの有無とは無関係に連続的に分光波形を検出する。その際、スクライブライン等、パターンの無い部分の分光波形を検出すると分光波形から層間膜の最表面の膜厚は計測できない。しかし、試料を移動させることによって計測視野が相対的に広くなり、スクライブライン付近の分光波形を検出すると、検出視野内にパターンが存在し、パターンの面積率が30%程度以上あるとき、分光波形から膜厚が得られる。光学系により計測視野を大きくする方法もあるが、視野内で膜厚変化する割合が高くなり高精度の膜厚計測ができない。
【0011】
又、本発明は分光波形検出時、試料を移動状態で検出するため、分光波形検出点に位置決めして試料を停止する動作、及び再度位置決めするための試料を移動させる動作が必要ないため、高速に膜厚分布を得ることができる。又、計測点を増やしても、試料を移動する速度は一定のため計測時間はそれ程増加せず、比較的短時間で計測点数の多い膜厚分布を得ることができる。膜厚分布は短時間で得られるため、得られた膜厚分布を基にして、平坦化処理工程における次の試料の加工条件を設定することができる。又、比較的詳細な膜厚分布が得られるため、平坦化処理工程以降の工程の加工条件に適用することが可能となる。
【0012】
又、上記目的を達成するために、本発明はCMP加工後、膜厚を計測する際、ウェハにおけるチップのように試料上の局所的領域でパターンの密度等による膜厚分布が生じ、その膜厚分布の変化が大きく、ウェハ面全域の膜厚分布と同程度となる場合にも膜厚分布を計測可能にする。その場合、分光波形の検出方向の軌道上で検出領域を複数の矩形状の区分領域に分割し、各区分領域で分光波形を連続的に検出する。区分領域で検出した分光波形からその区分領域における膜厚分布を求め、求めた各区分領域の膜厚分布から区分領域毎に最大値、平均値等、その区分領域を代表する膜厚値を求め、得られた各区分領域の膜厚を基に試料全面の膜厚分布を求める。これにより、パターン密度の違いによる局所的な膜厚分布が大きく変化し、ウェハ面全域の膜厚分布の変化と同程度になるような場合でも、局所的な膜厚分布に依存しないウェハ全面の膜厚分布を得ることができる。
【0013】
【発明の実施の形態】
本発明の実施の形態を、図により説明する。図1は、半導体デバイスの製造ラインにおけるCMP工程において、CMP加工後、ウェハ表面の膜厚を実際のデバイスパターン上で計測し、ウェハ面内の膜厚分布を求める例を示す。
【0014】
膜厚計測装置はステージ部10、検出光学系20、光学系移動部30、膜厚計測処理部40で構成され、ここでは図示されないCMP装置に組み込まれている。ステージ部10はウェハ14を載置する回転ステージ11、回転ステ−ジ11の特定位置の通過を検出する光電センサ12、回転ステージ11を回転する駆動モータ13から構成される。CMP加工後のウェハ14表面の分光波形を検出する検出光学系20は対物レンズ21、ハーフミラー22、結像レンズ23、リレーレンズ24、空間フィルタ25、視野絞り26、照明光源27、分光器28から構成される。照明光源27はキセノンランプ又はハロゲンランプ等の白色照明光源で白色照明光をハーフミラー22、対物レンズ21を介してウェハ14に照射する。ウェハ14からの反射光は対物レンズ21、ハーフミラー22、結像レンズ23、リレーレンズ24、空間フィルタ25、視野絞り26を介して分光器28に導かれる。分光器28で分光された分光波形は電気信号として膜厚計測処理部40に入力され、膜厚を算出してウェハ面内膜厚分布を求める。光学系移動部30は光学系移動ガイド31、駆動モータ32で構成され、検出光学系20を回転ステージ11の半径方向に移動することによってウェハ全面の分光波形を検出する。膜厚計測処理部40では、光学系移動処理41で検出光学系20の半径方向の移動量制御、分光器設定処理42で試料の周速度の変化に対応した分光器読取り時間の設定を行う。分光波形検出処理43で分光波形を入力し、照明光源の分光強度特性を除去し、ウェハの反射率分光波形を得る。全周検出処理44で検出光学系20が全面検出したか否かの判定を行う。波形補正処理45では、得られた分光波形に対しウェハ表面膜下のパターンの反射率による影響等の補正を行い、分光波形の歪みをなくす。周波数・位相解析処理46では波形補正された分光波形の横軸を波長の逆数に変換し、特開2000−310512号公報で開示している方式により分光波形の周波数・位相解析を行う。膜厚算出処理47で、周波数・位相解析結果に基づいて膜厚算出を行う。膜厚算出はフィッティング処理によっても行うことができる。この場合、波形補正処理45、周波数・位相解析処理46による処理は行わない。エリア処理48ではウェハ内のチップでパターン密度の違いによって膜厚分布が生じる場合、検出する区分領域毎にその区分領域を代表する膜厚を求める処理を行う。膜厚分布表示処理49では各区分領域で求めた膜厚をもとに膜厚分布を求め、表示する。
【0015】
次にウェハ全面の分光波形を求める方法について、図2により説明する。ウェハ14は、回転ステージ11に設置される。このとき、図示されないプリアライメント部によってウェハ14の外形からウェハ14の中心位置を決め、ノッチから座標軸を一致させる。回転ステージ11を一定回転数、例えば20rpmで回転させ、膜厚分布算出終了時まで、同一回転数を保つ。膜厚計測処理部40の光学系移動処理41によって駆動モータ32を駆動し、検出光学系20を光学系移動ガイド31に沿って移動し、ウェハ14の半径方向を走査する。CMP加工後の膜厚の面内分布は様々な分布をとりうるが、例えば2図の(1)に示す膜厚分布63のように、半径上ある程度の計測点61を取らないと精度よく表せられない場合が多い。そのため、半径方向には従来例のように外周付近で1点とはせずに数個の計測点61を設定する。ウェハ14の半径方向の走査には図2の(2)〜(5)に示されるようにいくつかの方法がある。図2の(2)同心円軌道では最初の1回転で検出光学系20は静止した状態で、ウェハ14の同一円周64上における計測点61の分光波形を検出する。光電センサ12で次の回転を検出し、次の回転では分光波形の検出は行わず、光学系移動処理41によって検出光学系20を1つ内側の周軌道65に移す。このように回転ステージ11の回転を停止することなく2回転で1周分の分光波形を検出することができるため、短時間でウェハ14全面の分光波形の検出が可能である。図2の(3)螺旋軌道1では回転ステ−ジ11の1回転中に検出光学系20を円周の最外部66から最内部67に移動するもので、1回転でウェハの円周方向の分光波形を検出する。この場合、検出光学系20の移動速度を考慮して回転ステージ11の回転数を低速にしても、1回転で分光波形を検出できるため、計測時間をより短くすることができる。また、通常、CMP加工後の面内分布は半径方向には依存するが、円周方向には依存しない場合が多いため、(3)螺旋軌道1による面内膜厚分布でも有益な情報が得られる。2図の(4)螺旋軌道2では、光学系移動41によって、検出光学系20を光学系移動ガイド31上、一定速度で移動し、回転ステージ11の複数回転でウェハ全面の分光波形を検出するものである。2図の(5)直線軌道では回転ステ−ジ11を停止し、検出光学系20を移動しウェハの両端68,69間の分光波形を検出するものである。本実施形態では、ウェハ全面の分光波形を検出するため光学系を移動したが、光学系は固定し、回転するステージを一方向に移動させてもよい。
【0016】
次に図3、図4、図5、図6により、各計測点61における分光波形の検出方法を説明する。図3にウェハをCMP加工した後の膜厚分布75を示す。ウェハ上のチップ71は密なパターン72と疎なパターン73で構成されパターン上に層間絶縁膜が形成されている。ウェハのCMP加工後の線74上における膜厚は、CMP加工の研磨レートがパターン密度の高い領域で遅く、密度の低い領域で速いため、チップ71内で膜厚はパターン密度に対応した膜厚分布75となる。このような膜厚分布をもったウェハに対し、大きな視野で分光波形を検出すると、算出した膜厚は誤差が大きくなるため、検出視野は小さくする。本実施形態では検出視野は20〜50μmφ程度としたが、これに限るものでなく更に小さくしてもよい。図4に検出視野を20〜50μmφでパターン84上の層間絶縁膜85の膜厚を計測する場合を示す。パターン上の視野82で分光波形を検出すると、検出した分光波形から最表面の膜厚を計測できる。しかし、スクライブライン等、パターンの無い部分の視野81で分光波形を検出すると分光波形から層間膜の最表面の膜厚は計測できない。そこで、ウェハを移動し、移動方向の実効的な検出視野83を1mm程度と広くすることにより、検出視野内のパターンの面積率が30%程度以上になるようにして、分光波形から膜厚を算出する。こうして、移動方向の実行的な視野を大きくすることにより、ウェハ上、殆どのパターンに対して誤差なく膜厚計測できる。ところで、こうして設定した検出視野83ではチップ71上のある一部分しか膜厚が得られなくなるため、本方式では図5に示すようにウェハの移動方向に連続的に検出箇所76で分光波形を検出する。各検出箇所76の検出視野内での膜厚の変化は小さいため、膜厚は精度良く求まる。通常、ウェハ面内の膜厚分布を求めるには各チップの同一箇所の膜厚、あるいはスクライブライン上の同一形状、同一サイズのパターンの膜厚を求める。本方式ではパターンに位置決めして膜厚測定を行わないため、図6に示すように各計測点61で検出箇所76(矩形は円周方向に長いが、作図の都合上、短くなっている)が複数個のチップ71にまたがるように、検出方向に長い矩形状の区分領域77で連続的に分光波形を検出する。区分領域77で検出した分光波形から各検出箇所76の膜厚を求め、求めた膜厚から区分領域77における最大値、平均値等を求め各計測点61の膜厚とする。
【0017】
次に図7によりウェハの移動方向の実効的検出視野83(矩形は円周方向に長いが、作図の都合上、短くなっている)を検出光学系20の位置に応じて一定値に保つ方法を説明する。検出光学系20を半径方向に走査する同心円軌道、螺旋軌道方式では、回転ステージ11は一定数で回転しているため、検出箇所の回転速度96は図7(3)に示すように検出箇所の半径方向位置に比例する。そのため分光器28の読取り速度を一定値にすると図7(1)、(2)に示すように外周における検出箇所91、94に対し、内周における検出箇所92、95でのウェハ回転方向の実効的検出視野83は小さくなる。そこで分光器設定処理42において、図7(3)に示すように分光器の読取り速度97を検出箇所76の半径方向に反比例させて分光器28に設定することにより、検出光学系20の位置によらず、実効的検出視野を一定値とする。
【0018】
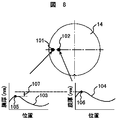
次に各計測点で計測された膜厚を基にウェハ14面内の膜厚分布を求める方法を図8により説明する。ウェハ14面上の計測点101、102では分光波形を検出箇所76で連続的に検出して膜厚分布103、104(ここでは、およそ1チップ分)を得る。CMP加工で平坦性が得られれば膜厚分布103、104はフラットになるが、通常は図8に示すように変化のある膜厚分布をもつ。そのため膜厚分布103、104から計測点101、102の膜厚を求める。膜厚分布103、104から膜厚を求める方法としては膜厚分布の最大値、最小値、平均値等を求める方法がある。ここでは、最大値105、106を使用し、それぞれ、計測点101、102における膜厚とする。膜厚差107が計測点101、102間の膜厚変化となる。ウェハ面内の各計測点についてエリア処理48で上記の処理を繰り返し、膜厚分布表示処理でウェハ面内の膜厚を表示する。
【0019】
尚、本方式ではパターンに位置決めして膜厚測定を行わないため、図6に示すように各計測点61で検出箇所76が2〜3個のチップ71にまたがるような区分領域77で連続的に分光波形を検出したが、検出光学系を20同心円軌道で走査する場合、チップの全領域をカバーできない割合が高くなる。そのため、図9に示すように各計測点111、112で半径方向の位置を僅かにずらした複数の軌道で分光波形を検出し、区分領域114で膜厚の検出箇所113を増やすことにより各計測点で精度良く膜厚を計測できるようにしても良い。又、図10に示すように計測点の軸方向121、122をウェハの軸方向123、124からずらして、チップの全領域をカバーする割合を高くしても良い。
【0020】
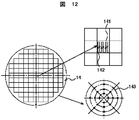
次に本発明の第2実施形態として、図11、図12により、半導体デバイスの製造ラインにおけるCMP工程において、CMP加工後、ウェハ表面の膜厚を実際のデバイスパターン上で計測し、チップ上の膜厚分布とウェハ面内の膜厚分布の両者を同一の膜厚計測装置で求める方式を示す。本実施形態の膜厚計測装置の構成は第1実施形態の膜厚計測装置の構成に対しステージ部10にX軸ステージ131、ステージ駆動モータ132が新たに加わり、膜厚計測処理部40の光学系移動処理41が光学系・ステ−ジ移動処理133、全面検出処理44が全点検出処理134に置き換わり、チップ内処理135、ウェハ面内処理136、終了処理137が新たに加わった以外、同一である。膜厚計測装置は、ここでは図示されないCMP装置に組み込まれている。本膜厚計測装置では、最初、ウェハ上、任意の1チップの膜厚分布を計測し、その後、ウェハ面内の膜厚分布を計測する。始めに、チップ内の膜厚分布を計測する方式を示す。ウェハ14は、図示されないプリアライメント部によってウェハ14の外形及び、ノッチから座標軸を一致させて回転ステージ11に設置する。チップ内の膜厚分布計測時、回転ステージ11は静止させる。始めに、光学系・ステージ移動処理133によってX軸ステージ131、検出光学系20を移動し、図12に示すように計測するチップ141の計測開始点142に検出光学系20を位置決めする。検出光学系20を静止し、X軸ステージ131を駆動し、第1実施形態の場合と同様にウェハ14の移動状態で分光波形を連続的に検出する。移動方向の実効的検出視野は500μm〜1mmで1ライン上、5〜10点分光波形を検出する。1ライン上予め決められた個数検出すると、X軸ステージ131の移動を停止し、検出光学系20を1ライン(1〜2mm)分移動する。再度、X軸ステージ131を移動して分光波形を検出し、同様の処理を繰り返しチップ全面の分光波形を検出する。ステージの送り速度は一定のため、分光器の読取り速度は全面で一定である。ステージの停止は分光波形検出点で行わず、チップ両端のみで行う。又、分光波形計測点におけるパターンの位置決めも行わないため、計測時間は短くできる。
【0021】
次に、得られた分光波形から膜厚を算出する。ウェハ移動方向における実効的検出視野は静止時に比較し大きくなるが検出視野の膜厚変化は比較的小さいため、膜厚は誤差を小さく計測できる。又、実効的検出視野が大きくなったため、視野内にパターンがない場合の割合が低くなり、膜厚計測できない割合が低くなる。チップ内の膜厚分布を計測する場合、計測した膜厚をそのままチップ内の膜厚分布として用いるためチップ内処理135でエリア処理48を行わず、膜厚分布表示処理49でチップ内膜厚分布を表示する。
【0022】
チップ内膜厚分布計測後、第1実施形態で説明した方式でウェハ14面内膜厚分布の計測点143の膜厚を計測し、ウェハ面内膜厚分布を求める。
【0023】
次に本発明の第3実施形態として、図13により、半導体デバイスの製造ラインにおけるCMP工程において、CMP加工後、ウェハ面内の膜厚分布の計測を水中で行う方式を示す。CMP加工したウェハは、通常、洗浄装置で洗浄されるまで、ウェハに付着した研磨砥粒が固着しないように水中で保管される。そこで本膜厚計測装置でも、水中で計測する。ウェハ表面の膜厚は実際のデバイスパターン上で特定パターンの位置決めを行うことなしに計測する。
【0024】
膜厚計測装置はウェハホルダ部150、検出光学系20、光学系移動部30、膜厚計測処理部40で構成され、ウェハホルダ部150以外は、配置は異なるが構成要素、処理要素は第1実施形態と同一である。膜厚計測装置は、ここでは図示されないCMP装置に組み込まれている。ウェハホルダ部150はウェハ14を保持するホルダ151、ホルダ151の特定位置の通過を検出する光電センサ152、ホルダ11を回転する駆動モータ153、膜厚計測時、ウェハを収容する水槽154、検出光学系20で分光波形を検出するガラス窓155、水槽154を満たす水156から構成される。
【0025】
次にウェハ全面の分光波形を求める方法について、図13により説明する。ウェハ14は、ノッチを検出して座標軸を決定し、ホルダ151で真空吸着によりウェハ14の表面を下にして保持する。ホルダ151を水槽154内の水156に沈め、ウェハ表面とガラス間の距離を数mm程度にする。ホルダ151を一定回転数で回転させ、膜厚分布算出終了時まで、同一回転数を保つ。膜厚計測処理部40の光学系移動処理41によって駆動モータ32を駆動し、検出光学系20を光学系移動ガイド31に沿って移動し、ウェハ14の半径方向を走査する。半径方向の走査には第1実施形態で説明したような同心円軌道、螺旋軌道があり、ウェハの回転を停止せず、分光波形を連続的に検出し、短時間でウェハ全面の分光分布を得る。分光波形検出時、ウェハの回転方向の実効的検出視野は大きくなるが、視野内での膜厚変化が小さいため、誤差なく膜厚を計測できる。また、実効的検出視野が大きくなるためパターンの無い部分で計測できない確率が低くなる。本実施形態では水156を介して分光波形を検出するが、水156の屈折率が空気の屈折率より層間絶縁膜の屈折率に近くなるため、分光波形の振幅が小さくなる。そこで、波形補正処理45で分光波形の振幅の補正を行う。
【0026】
本方式ではパターンに位置決めして膜厚測定を行わないため、第1実施形態で説明したように各計測点で検出箇所が2〜3個のチップ71にまたがるように連続的に分光波形を検出し、検出した分光波形から各検出箇所の膜厚を求め、エリア処理48で求めた膜厚の最大値、平均値等を求め各計測点の膜厚とする。各計測点の膜厚を用い、膜厚分布表示処理49でウェハ面内膜厚分布を表示する。
【0027】
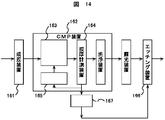
次に本発明の第4実施形態として、図14により、半導体デバイスの製造ラインで、成膜後、CMP装置162、及びその後のエッチング装置166で、プロセスを最適化する方法を示す。成膜装置161で成膜されたウェハはCMP装置162に移送される。CMP装置162ではCMP加工部163でCMP加工を行い、加工後、CMP装置に組み込まれた膜厚計測装置164においてin−lineで膜厚計測を行う。膜厚計測はウェハ上、実際のデバイスパターン上で特定のパターンに位置決めすることなく連続的に行うため、短時間にしかも比較的詳細な膜厚分布が得られる。CMP加工条件設定部165では、得られたウェハ面内膜厚分布に基づき研磨ヘッド加圧力、研磨ヘッド加圧分布、加工時間等の設定を行う。CMP加工部163はCMP加工条件設定部165の設定に従い、CMP加工を行う。ウェハ毎に、毎回同様の処理を行うことにより、ウェハの面内均一性が図れると共に、ウェハ間の膜厚均一性の向上も図れる。又、転送部167によって面内膜厚分布をCMP工程以降のエッチング装置166に転送し、エッチング装置166における加工条件の最適化のために使用する。
【0028】
次に本発明の第5実施形態として、図15により、半導体デバイスの製造ラインで、成膜装置161、及びその後のCMP装置162で、プロセスを最適化する方法を示す。成膜装置161の成膜部173で成膜されたウェハは、成膜装置に組み込まれた膜厚計測装置174においてin−lineで膜厚計測を行う。膜厚計測はCMP装置162に組み込まれた膜厚計測装置164と同様、ウェハ上の、実際のデバイスパターン上で特定のパターンに位置決めすることなく連続的に行い、短時間で比較的詳細な膜厚分布を得る。成膜条件設定部175では、得られたウェハ面内膜厚分布に基づき、ガス流量、成膜時間等の成膜条件の設定を行う。成膜部173は成膜条件設定部175の設定に従い、成膜を行う。これにより、ウェハの面内均一性が図れると共に、ウェハ間の膜厚均一性の向上も図れる。又、転送部177によって面内膜厚分布を次工程のCMP装置162のCMP加工条件設定部165に転送する。CMP加工条件設定部165では、成膜装置161から転送された面内膜厚分布と、CMP装置162でCMP加工後、膜厚計測装置164でin−line計測された膜厚分布とからCMP加工部の研磨レートを計算し、次ウェハの研磨時間の算出に用いる。
【0029】
【発明の効果】
本発明によれば、CMP加工後、ウェハの膜厚分布を求める際、ウェハ上の計測用特定パターンに位置決めすることなく、ウェハの回転状態で分光波形を連続的に検出するため、短時間で比較的多数の計測点で膜厚計測可能となり、比較的詳細なウェハ面内膜厚分布を得ることができる。又、半導体デバイスの製造ラインで、成膜後、表面の平坦化処理工程において、CMP加工後、短時間で比較的詳細なウェハ面内膜厚分布を計測できるため、次のウェハのCMP加工における加工条件に適用することにより、CMP加工工程での均一性の最適化が図れると共に、平坦化処理工程以降のエッチング工程等の加工条件にも適用でき、高精度な半導体デバイスの製造が可能となる。
【図面の簡単な説明】
【図1】本発明の第1実施形態における膜厚計測装置の装置構成を示す概略図である。
【図2】光学系を走査して、ウェハ全面の分光波形を検出する方式を説明する概略図である。
【図3】チップ内のパターン密度と膜厚の関係を説明する概略図である。
【図4】分光波形検出時、ウェハの移動により実効的検出視野を大きくする方式を説明する概略図である。
【図5】分光波形をウェハ移動方向に連続的に検出する方式を説明する概略図である。
【図6】各計測点で複数のチップにまたがるように連続的に分光波形を検出する方式を説明する概略図である。
【図7】ウェハの移動方向の実効的検出視野を光学系の位置に応じて一定値に保つ方式を説明する概略図である。
【図8】各計測点で計測された膜厚を基にウェハ全面の膜厚分布を求める方式を説明する概略図である。
【図9】各計測点で複数の軌道で分光波形を検出し、膜厚の検出箇所を増やすことにより精度良く膜厚計測する方式を説明する概略図である。
【図10】計測点の軸方向をウェハの軸方向からずらして、チップの全領域をカバーする割合を高くする方式を説明する概略図である。
【図11】本発明の第2実施形態における膜厚計測装置の装置構成を示す概略図である。
【図12】チップとウェハの面内分布を同一膜厚計測装置で計測する方式を説明する概略図である。
【図13】本発明の第3実施形態における膜厚計測装置の装置構成を示す概略図である。
【図14】本発明の第4実施形態における半導体デバイスの製造ラインでのCMP装置におけるプロセスを示す概略図である。
【図15】本発明の第5実施形態における半導体デバイスの製造ラインでの成膜装置におけるプロセスを示す概略図である。
【符号の説明】
10…ステージ部、11…回転ステージ、12…光電センサ、13…駆動モータ、14…ウェハ、20…検出光学系、21…対物レンズ、22…ハーフミラー、23…結像レンズ、24…リレーレンズ、25…空間フィルタ、26…視野絞り、27…照明光源、28…分光器、30…光学系移動部、31…光学系移動ガイド、32…駆動モータ、40…膜厚計測処理部、41…光学系移動処理、42…分光器設定処理、43…分光波形検出処理、44…全周検出処理、45…波形補正処理、46…周波数・位相解析処理、47…膜厚算出処理、48…エリア処理、49…膜厚分布表示処理、131…X軸ステージ、132…ステージ駆動モータ、133…光学系・ステ−ジ移動処理、134…全点検出処理、135…チップ内処理、136…ウェハ面内処理、137…終了処理、150…ウェハホルダ部、151…ホルダ、152…光電センサ、153…駆動モータ、154…水槽、155…ガラス窓、156…水、161…成膜装置、162…CMP装置、163…CMP加工部、164…膜厚計測装置、165…CMP加工条件設定部、166…エッチング装置、167…転送部、173…成膜部、174…膜厚計測装置、175…成膜条件設定部、177…転送部。
【発明の属する技術分野】
本発明は光学的に透明な膜の厚さ及び厚さ分布の計測及び膜厚を管理して、半導体デバイスを製造する方法に関し、特に、半導体デバイスの製造ラインで、成膜後、表面の平坦化処理工程において、ウェハの表面膜厚を計測する方法、及び膜厚を計測することにより平坦化処理工程を管理して、半導体デバイスを製造する方法に関する。透明膜の例としては、シリコン等の半導体デバイスの他、DVD、TFT、LSIレチクル等の薄膜デバイスの製造工程におけるレジスト膜や絶縁膜等も含まれる。
【0002】
【従来の技術】
半導体デバイスは成膜、露光及びエッチング等の各プロセスを経て、素子及び配線パターンがシリコンウェハ上に形成され、製造される。近年、高精度化・高密度化を実現するために、素子及び配線パターンは微細化・多層化の方向に進んでいる。微細なパターンを多層形成すると、ウェハ表面の凹凸が増大し、微細なパターンを精度良く露光することが難しくなってくる。そのため、多層配線層を形成した上に保護膜、又は絶縁膜を形成したウェハ表面を、平坦化する方法が採用されている。
【0003】
この平坦化プロセスとして、化学的及び物理的作用により表面を研磨して平坦化するCMP(Chemical Mechanical Polishing)が用いられる。CMPは、当該技術分野において既知の加工方法である。
【0004】
CMP加工において重要な課題として、研磨レートの変動による加工終了後の残膜厚の精度低下や、加工面内の膜厚不均一性がある。そのため、CMP加工後、膜厚を計測し、計測結果を基に次のウェハのCMP加工の条件を変更したり、計測したウェハを再度、CMP加工できるようなin−line計測技術が必要となる。これまで、in−line計測技術として、種々の方法が提案されている。
【0005】
特開平9−109023号公報には、CMP装置の出口ステーションに装着された水中で膜厚計測が可能な、in−line計測システムが開示されている。特開平9−298175号公報ではCMP加工時の基板保持部をCMP加工後、複数のセンサを1次元的に配列したモニタユニットアレイ部に移動させ、試料を回転させ、水を介してウェハ全面の膜厚分布を求める方法が開示されている。又、特開平8−17768号公報では、CMP加工後、ウェハを吸着したホルダを光学センサ上に移動し、ウェハに可視光を照射して膜厚を求める方法が開示されている。又、特開平10−98016号公報では、計測部をCMP装置に組み込み、CMP加工後、湿式で膜厚を計測する方法が開示されている。
【0006】
【発明が解決しようとする課題】
CMP加工後、膜厚をin−line計測する場合、オフラインの膜厚計測装置と異なり、膜厚計測によりCMP装置のスループットが低下しないように、in−line膜厚計測時間はできるだけ小さくする必要がある。一方、計測結果の面内膜厚分布を基に次のウェハのCMP加工条件を変更するためには、ウェハ全面にわたりある程度詳細な膜厚分布が必要になる。一般に、CMPの研磨レートはパターン密度が高い領域で遅く、密度が低い領域で速い。従って、CMP加工後の膜厚はチップ内で配線、素子の密度の違いで場所によって大きく異なり、平坦性が問題となる。又、パターン密度の分布は各チップで同一のため、ウェハ上の各チップで同一の膜厚分布となる筈であるが、ウェハの周辺ではパターンが無い、あるいはCMP加工時のウェハホルダの加圧分布によりウェハ全面にわたって膜厚が異なり、ウェハ全面に関する均一性が問題となる。通常、CMP加工後の膜厚の均一性を評価する場合、ウェハ上の中心と周辺のチップを選択し、各チップの膜厚計測用の特定パターン上で膜厚を計測し、ウェハ上の膜厚分布を求めている。この場合、ある程度詳細な膜厚分布を求めるには膜厚計測点を多くする必要がある。しかし、通常の方法では、チップの位置決め、膜厚計測用パターンの位置決めを行う必要があり、計測点を増やすと計測時間が長くなり、in−line計測に適さなくなる。
【0007】
特開平9−109023号公報では、CMP加工後のウェハを洗浄、乾燥の工程の前に膜厚計測ができるため、その結果を短時間で次のウェハのCMP加工に反映できる。膜厚計測の方法は詳しく述べられていないが、チップ、及び、計測パターンを指定し、各計測点に位置決めすることによって膜厚を計測すると考えられ、計測点数が増えると計測時間がかかると予想される。特開平9−298175号公報では、複数のセンサを1次元的に配列したモニタユニットアレイに対し、試料を回転させることによって1回転で膜厚分布を求めることができる。しかし、各センサは、膜厚の計測点領域での平均値を計測するとしており、チップ内でパターン密度の違いで膜厚が異なる等、計測領域内で膜厚が大きく変化している場合、膜厚計測に誤差のでる可能性が高くなる。又、特開平8−17768号公報では、CMP加工後、ウェハを吸着したCMP加工用のホルダを光学センサ上に移動することによって膜厚を計測できるが、特定位置の膜厚を計測するためには位置決めする必要がある。膜厚分布に関して述べられていないが、膜厚分布を求めるために計測点数を多くすると、計測時間が長くなると予想される。又、特開平10−98016号公報では、CMP加工後のウェハ面内の膜厚分布を求めるため、中心と周辺部の各チップを選択し、画像認識装置により各チップの同一箇所を選定して膜厚を計測し、面内膜厚分布を求めている。これまでと同様、計測点数を増やすと計測点数に比例して計測時間が長くなる。
【0008】
以上、上記に開示されている方法は面内膜厚分布を求めるためにチップ、及びチップ上の計測用特定パターンに位置決めする必要がある。また、1次元センサに対しウェハを回転し、位置決めしない場合でも、1次元センサの各センサの計測点での局所的な膜厚の変化は考慮されていない。通常、CMP加工により平坦化を行った後でも、パターン密度の違いによって、局所的にも膜厚分布が生じ、その変化は場合によってはウェハ全域の膜厚分布と同程度となる。
【0009】
本発明の目的は、CMP加工後、試料表面からの反射光の分光波形に基づいて、膜厚を計測し面内膜厚分布を求める際、試料上の測定個所及び、特定パターンの位置決めすることなしに膜厚分布を求める膜厚計測方法及びその装置を提供することにある。又、ウェハにおけるチップのように試料上の局所的領域でパターンの密度等による膜厚分布が生じる場合でも、試料の局所的な膜厚分布とは別に試料全面にわたる膜厚分布を求める膜厚計測方法及びその装置を提供することにある。又、半導体デバイスの製造ラインで、成膜後、表面の平坦化処理工程において、CMP加工後、試料表面からの反射光の分光波形に基づいて、膜厚を計測し面内膜厚分布を求める際、試料上の測定個所あるいは、特定パターンの位置決めすることなしに膜厚分布を求め、得られた結果より、平坦化処理工程における次の試料の加工条件を変更し、更に平坦化処理工程以降の工程の加工条件に適用することによって、薄膜デバイスを製造する方法及びその製造装置を提供することにある。
【0010】
【課題を解決するための手段】
上記目的を達成するために、本発明はCMP加工後、膜厚を計測する際、試料を移動し、移動中の試料からの反射光の分光波形を連続的に検出し、試料全面の分光波形を検出して、試料面内の膜厚分布を求める。従来、試料からの分光波形に基づいてパターン上の膜厚を計測するには10〜20μm□と比較的大きなパターンを必要とし、膜厚計測用の特定パターンに位置決めする必要があった。本発明では分光波形の検出点におけるパターンの有無とは無関係に連続的に分光波形を検出する。その際、スクライブライン等、パターンの無い部分の分光波形を検出すると分光波形から層間膜の最表面の膜厚は計測できない。しかし、試料を移動させることによって計測視野が相対的に広くなり、スクライブライン付近の分光波形を検出すると、検出視野内にパターンが存在し、パターンの面積率が30%程度以上あるとき、分光波形から膜厚が得られる。光学系により計測視野を大きくする方法もあるが、視野内で膜厚変化する割合が高くなり高精度の膜厚計測ができない。
【0011】
又、本発明は分光波形検出時、試料を移動状態で検出するため、分光波形検出点に位置決めして試料を停止する動作、及び再度位置決めするための試料を移動させる動作が必要ないため、高速に膜厚分布を得ることができる。又、計測点を増やしても、試料を移動する速度は一定のため計測時間はそれ程増加せず、比較的短時間で計測点数の多い膜厚分布を得ることができる。膜厚分布は短時間で得られるため、得られた膜厚分布を基にして、平坦化処理工程における次の試料の加工条件を設定することができる。又、比較的詳細な膜厚分布が得られるため、平坦化処理工程以降の工程の加工条件に適用することが可能となる。
【0012】
又、上記目的を達成するために、本発明はCMP加工後、膜厚を計測する際、ウェハにおけるチップのように試料上の局所的領域でパターンの密度等による膜厚分布が生じ、その膜厚分布の変化が大きく、ウェハ面全域の膜厚分布と同程度となる場合にも膜厚分布を計測可能にする。その場合、分光波形の検出方向の軌道上で検出領域を複数の矩形状の区分領域に分割し、各区分領域で分光波形を連続的に検出する。区分領域で検出した分光波形からその区分領域における膜厚分布を求め、求めた各区分領域の膜厚分布から区分領域毎に最大値、平均値等、その区分領域を代表する膜厚値を求め、得られた各区分領域の膜厚を基に試料全面の膜厚分布を求める。これにより、パターン密度の違いによる局所的な膜厚分布が大きく変化し、ウェハ面全域の膜厚分布の変化と同程度になるような場合でも、局所的な膜厚分布に依存しないウェハ全面の膜厚分布を得ることができる。
【0013】
【発明の実施の形態】
本発明の実施の形態を、図により説明する。図1は、半導体デバイスの製造ラインにおけるCMP工程において、CMP加工後、ウェハ表面の膜厚を実際のデバイスパターン上で計測し、ウェハ面内の膜厚分布を求める例を示す。
【0014】
膜厚計測装置はステージ部10、検出光学系20、光学系移動部30、膜厚計測処理部40で構成され、ここでは図示されないCMP装置に組み込まれている。ステージ部10はウェハ14を載置する回転ステージ11、回転ステ−ジ11の特定位置の通過を検出する光電センサ12、回転ステージ11を回転する駆動モータ13から構成される。CMP加工後のウェハ14表面の分光波形を検出する検出光学系20は対物レンズ21、ハーフミラー22、結像レンズ23、リレーレンズ24、空間フィルタ25、視野絞り26、照明光源27、分光器28から構成される。照明光源27はキセノンランプ又はハロゲンランプ等の白色照明光源で白色照明光をハーフミラー22、対物レンズ21を介してウェハ14に照射する。ウェハ14からの反射光は対物レンズ21、ハーフミラー22、結像レンズ23、リレーレンズ24、空間フィルタ25、視野絞り26を介して分光器28に導かれる。分光器28で分光された分光波形は電気信号として膜厚計測処理部40に入力され、膜厚を算出してウェハ面内膜厚分布を求める。光学系移動部30は光学系移動ガイド31、駆動モータ32で構成され、検出光学系20を回転ステージ11の半径方向に移動することによってウェハ全面の分光波形を検出する。膜厚計測処理部40では、光学系移動処理41で検出光学系20の半径方向の移動量制御、分光器設定処理42で試料の周速度の変化に対応した分光器読取り時間の設定を行う。分光波形検出処理43で分光波形を入力し、照明光源の分光強度特性を除去し、ウェハの反射率分光波形を得る。全周検出処理44で検出光学系20が全面検出したか否かの判定を行う。波形補正処理45では、得られた分光波形に対しウェハ表面膜下のパターンの反射率による影響等の補正を行い、分光波形の歪みをなくす。周波数・位相解析処理46では波形補正された分光波形の横軸を波長の逆数に変換し、特開2000−310512号公報で開示している方式により分光波形の周波数・位相解析を行う。膜厚算出処理47で、周波数・位相解析結果に基づいて膜厚算出を行う。膜厚算出はフィッティング処理によっても行うことができる。この場合、波形補正処理45、周波数・位相解析処理46による処理は行わない。エリア処理48ではウェハ内のチップでパターン密度の違いによって膜厚分布が生じる場合、検出する区分領域毎にその区分領域を代表する膜厚を求める処理を行う。膜厚分布表示処理49では各区分領域で求めた膜厚をもとに膜厚分布を求め、表示する。
【0015】
次にウェハ全面の分光波形を求める方法について、図2により説明する。ウェハ14は、回転ステージ11に設置される。このとき、図示されないプリアライメント部によってウェハ14の外形からウェハ14の中心位置を決め、ノッチから座標軸を一致させる。回転ステージ11を一定回転数、例えば20rpmで回転させ、膜厚分布算出終了時まで、同一回転数を保つ。膜厚計測処理部40の光学系移動処理41によって駆動モータ32を駆動し、検出光学系20を光学系移動ガイド31に沿って移動し、ウェハ14の半径方向を走査する。CMP加工後の膜厚の面内分布は様々な分布をとりうるが、例えば2図の(1)に示す膜厚分布63のように、半径上ある程度の計測点61を取らないと精度よく表せられない場合が多い。そのため、半径方向には従来例のように外周付近で1点とはせずに数個の計測点61を設定する。ウェハ14の半径方向の走査には図2の(2)〜(5)に示されるようにいくつかの方法がある。図2の(2)同心円軌道では最初の1回転で検出光学系20は静止した状態で、ウェハ14の同一円周64上における計測点61の分光波形を検出する。光電センサ12で次の回転を検出し、次の回転では分光波形の検出は行わず、光学系移動処理41によって検出光学系20を1つ内側の周軌道65に移す。このように回転ステージ11の回転を停止することなく2回転で1周分の分光波形を検出することができるため、短時間でウェハ14全面の分光波形の検出が可能である。図2の(3)螺旋軌道1では回転ステ−ジ11の1回転中に検出光学系20を円周の最外部66から最内部67に移動するもので、1回転でウェハの円周方向の分光波形を検出する。この場合、検出光学系20の移動速度を考慮して回転ステージ11の回転数を低速にしても、1回転で分光波形を検出できるため、計測時間をより短くすることができる。また、通常、CMP加工後の面内分布は半径方向には依存するが、円周方向には依存しない場合が多いため、(3)螺旋軌道1による面内膜厚分布でも有益な情報が得られる。2図の(4)螺旋軌道2では、光学系移動41によって、検出光学系20を光学系移動ガイド31上、一定速度で移動し、回転ステージ11の複数回転でウェハ全面の分光波形を検出するものである。2図の(5)直線軌道では回転ステ−ジ11を停止し、検出光学系20を移動しウェハの両端68,69間の分光波形を検出するものである。本実施形態では、ウェハ全面の分光波形を検出するため光学系を移動したが、光学系は固定し、回転するステージを一方向に移動させてもよい。
【0016】
次に図3、図4、図5、図6により、各計測点61における分光波形の検出方法を説明する。図3にウェハをCMP加工した後の膜厚分布75を示す。ウェハ上のチップ71は密なパターン72と疎なパターン73で構成されパターン上に層間絶縁膜が形成されている。ウェハのCMP加工後の線74上における膜厚は、CMP加工の研磨レートがパターン密度の高い領域で遅く、密度の低い領域で速いため、チップ71内で膜厚はパターン密度に対応した膜厚分布75となる。このような膜厚分布をもったウェハに対し、大きな視野で分光波形を検出すると、算出した膜厚は誤差が大きくなるため、検出視野は小さくする。本実施形態では検出視野は20〜50μmφ程度としたが、これに限るものでなく更に小さくしてもよい。図4に検出視野を20〜50μmφでパターン84上の層間絶縁膜85の膜厚を計測する場合を示す。パターン上の視野82で分光波形を検出すると、検出した分光波形から最表面の膜厚を計測できる。しかし、スクライブライン等、パターンの無い部分の視野81で分光波形を検出すると分光波形から層間膜の最表面の膜厚は計測できない。そこで、ウェハを移動し、移動方向の実効的な検出視野83を1mm程度と広くすることにより、検出視野内のパターンの面積率が30%程度以上になるようにして、分光波形から膜厚を算出する。こうして、移動方向の実行的な視野を大きくすることにより、ウェハ上、殆どのパターンに対して誤差なく膜厚計測できる。ところで、こうして設定した検出視野83ではチップ71上のある一部分しか膜厚が得られなくなるため、本方式では図5に示すようにウェハの移動方向に連続的に検出箇所76で分光波形を検出する。各検出箇所76の検出視野内での膜厚の変化は小さいため、膜厚は精度良く求まる。通常、ウェハ面内の膜厚分布を求めるには各チップの同一箇所の膜厚、あるいはスクライブライン上の同一形状、同一サイズのパターンの膜厚を求める。本方式ではパターンに位置決めして膜厚測定を行わないため、図6に示すように各計測点61で検出箇所76(矩形は円周方向に長いが、作図の都合上、短くなっている)が複数個のチップ71にまたがるように、検出方向に長い矩形状の区分領域77で連続的に分光波形を検出する。区分領域77で検出した分光波形から各検出箇所76の膜厚を求め、求めた膜厚から区分領域77における最大値、平均値等を求め各計測点61の膜厚とする。
【0017】
次に図7によりウェハの移動方向の実効的検出視野83(矩形は円周方向に長いが、作図の都合上、短くなっている)を検出光学系20の位置に応じて一定値に保つ方法を説明する。検出光学系20を半径方向に走査する同心円軌道、螺旋軌道方式では、回転ステージ11は一定数で回転しているため、検出箇所の回転速度96は図7(3)に示すように検出箇所の半径方向位置に比例する。そのため分光器28の読取り速度を一定値にすると図7(1)、(2)に示すように外周における検出箇所91、94に対し、内周における検出箇所92、95でのウェハ回転方向の実効的検出視野83は小さくなる。そこで分光器設定処理42において、図7(3)に示すように分光器の読取り速度97を検出箇所76の半径方向に反比例させて分光器28に設定することにより、検出光学系20の位置によらず、実効的検出視野を一定値とする。
【0018】
次に各計測点で計測された膜厚を基にウェハ14面内の膜厚分布を求める方法を図8により説明する。ウェハ14面上の計測点101、102では分光波形を検出箇所76で連続的に検出して膜厚分布103、104(ここでは、およそ1チップ分)を得る。CMP加工で平坦性が得られれば膜厚分布103、104はフラットになるが、通常は図8に示すように変化のある膜厚分布をもつ。そのため膜厚分布103、104から計測点101、102の膜厚を求める。膜厚分布103、104から膜厚を求める方法としては膜厚分布の最大値、最小値、平均値等を求める方法がある。ここでは、最大値105、106を使用し、それぞれ、計測点101、102における膜厚とする。膜厚差107が計測点101、102間の膜厚変化となる。ウェハ面内の各計測点についてエリア処理48で上記の処理を繰り返し、膜厚分布表示処理でウェハ面内の膜厚を表示する。
【0019】
尚、本方式ではパターンに位置決めして膜厚測定を行わないため、図6に示すように各計測点61で検出箇所76が2〜3個のチップ71にまたがるような区分領域77で連続的に分光波形を検出したが、検出光学系を20同心円軌道で走査する場合、チップの全領域をカバーできない割合が高くなる。そのため、図9に示すように各計測点111、112で半径方向の位置を僅かにずらした複数の軌道で分光波形を検出し、区分領域114で膜厚の検出箇所113を増やすことにより各計測点で精度良く膜厚を計測できるようにしても良い。又、図10に示すように計測点の軸方向121、122をウェハの軸方向123、124からずらして、チップの全領域をカバーする割合を高くしても良い。
【0020】
次に本発明の第2実施形態として、図11、図12により、半導体デバイスの製造ラインにおけるCMP工程において、CMP加工後、ウェハ表面の膜厚を実際のデバイスパターン上で計測し、チップ上の膜厚分布とウェハ面内の膜厚分布の両者を同一の膜厚計測装置で求める方式を示す。本実施形態の膜厚計測装置の構成は第1実施形態の膜厚計測装置の構成に対しステージ部10にX軸ステージ131、ステージ駆動モータ132が新たに加わり、膜厚計測処理部40の光学系移動処理41が光学系・ステ−ジ移動処理133、全面検出処理44が全点検出処理134に置き換わり、チップ内処理135、ウェハ面内処理136、終了処理137が新たに加わった以外、同一である。膜厚計測装置は、ここでは図示されないCMP装置に組み込まれている。本膜厚計測装置では、最初、ウェハ上、任意の1チップの膜厚分布を計測し、その後、ウェハ面内の膜厚分布を計測する。始めに、チップ内の膜厚分布を計測する方式を示す。ウェハ14は、図示されないプリアライメント部によってウェハ14の外形及び、ノッチから座標軸を一致させて回転ステージ11に設置する。チップ内の膜厚分布計測時、回転ステージ11は静止させる。始めに、光学系・ステージ移動処理133によってX軸ステージ131、検出光学系20を移動し、図12に示すように計測するチップ141の計測開始点142に検出光学系20を位置決めする。検出光学系20を静止し、X軸ステージ131を駆動し、第1実施形態の場合と同様にウェハ14の移動状態で分光波形を連続的に検出する。移動方向の実効的検出視野は500μm〜1mmで1ライン上、5〜10点分光波形を検出する。1ライン上予め決められた個数検出すると、X軸ステージ131の移動を停止し、検出光学系20を1ライン(1〜2mm)分移動する。再度、X軸ステージ131を移動して分光波形を検出し、同様の処理を繰り返しチップ全面の分光波形を検出する。ステージの送り速度は一定のため、分光器の読取り速度は全面で一定である。ステージの停止は分光波形検出点で行わず、チップ両端のみで行う。又、分光波形計測点におけるパターンの位置決めも行わないため、計測時間は短くできる。
【0021】
次に、得られた分光波形から膜厚を算出する。ウェハ移動方向における実効的検出視野は静止時に比較し大きくなるが検出視野の膜厚変化は比較的小さいため、膜厚は誤差を小さく計測できる。又、実効的検出視野が大きくなったため、視野内にパターンがない場合の割合が低くなり、膜厚計測できない割合が低くなる。チップ内の膜厚分布を計測する場合、計測した膜厚をそのままチップ内の膜厚分布として用いるためチップ内処理135でエリア処理48を行わず、膜厚分布表示処理49でチップ内膜厚分布を表示する。
【0022】
チップ内膜厚分布計測後、第1実施形態で説明した方式でウェハ14面内膜厚分布の計測点143の膜厚を計測し、ウェハ面内膜厚分布を求める。
【0023】
次に本発明の第3実施形態として、図13により、半導体デバイスの製造ラインにおけるCMP工程において、CMP加工後、ウェハ面内の膜厚分布の計測を水中で行う方式を示す。CMP加工したウェハは、通常、洗浄装置で洗浄されるまで、ウェハに付着した研磨砥粒が固着しないように水中で保管される。そこで本膜厚計測装置でも、水中で計測する。ウェハ表面の膜厚は実際のデバイスパターン上で特定パターンの位置決めを行うことなしに計測する。
【0024】
膜厚計測装置はウェハホルダ部150、検出光学系20、光学系移動部30、膜厚計測処理部40で構成され、ウェハホルダ部150以外は、配置は異なるが構成要素、処理要素は第1実施形態と同一である。膜厚計測装置は、ここでは図示されないCMP装置に組み込まれている。ウェハホルダ部150はウェハ14を保持するホルダ151、ホルダ151の特定位置の通過を検出する光電センサ152、ホルダ11を回転する駆動モータ153、膜厚計測時、ウェハを収容する水槽154、検出光学系20で分光波形を検出するガラス窓155、水槽154を満たす水156から構成される。
【0025】
次にウェハ全面の分光波形を求める方法について、図13により説明する。ウェハ14は、ノッチを検出して座標軸を決定し、ホルダ151で真空吸着によりウェハ14の表面を下にして保持する。ホルダ151を水槽154内の水156に沈め、ウェハ表面とガラス間の距離を数mm程度にする。ホルダ151を一定回転数で回転させ、膜厚分布算出終了時まで、同一回転数を保つ。膜厚計測処理部40の光学系移動処理41によって駆動モータ32を駆動し、検出光学系20を光学系移動ガイド31に沿って移動し、ウェハ14の半径方向を走査する。半径方向の走査には第1実施形態で説明したような同心円軌道、螺旋軌道があり、ウェハの回転を停止せず、分光波形を連続的に検出し、短時間でウェハ全面の分光分布を得る。分光波形検出時、ウェハの回転方向の実効的検出視野は大きくなるが、視野内での膜厚変化が小さいため、誤差なく膜厚を計測できる。また、実効的検出視野が大きくなるためパターンの無い部分で計測できない確率が低くなる。本実施形態では水156を介して分光波形を検出するが、水156の屈折率が空気の屈折率より層間絶縁膜の屈折率に近くなるため、分光波形の振幅が小さくなる。そこで、波形補正処理45で分光波形の振幅の補正を行う。
【0026】
本方式ではパターンに位置決めして膜厚測定を行わないため、第1実施形態で説明したように各計測点で検出箇所が2〜3個のチップ71にまたがるように連続的に分光波形を検出し、検出した分光波形から各検出箇所の膜厚を求め、エリア処理48で求めた膜厚の最大値、平均値等を求め各計測点の膜厚とする。各計測点の膜厚を用い、膜厚分布表示処理49でウェハ面内膜厚分布を表示する。
【0027】
次に本発明の第4実施形態として、図14により、半導体デバイスの製造ラインで、成膜後、CMP装置162、及びその後のエッチング装置166で、プロセスを最適化する方法を示す。成膜装置161で成膜されたウェハはCMP装置162に移送される。CMP装置162ではCMP加工部163でCMP加工を行い、加工後、CMP装置に組み込まれた膜厚計測装置164においてin−lineで膜厚計測を行う。膜厚計測はウェハ上、実際のデバイスパターン上で特定のパターンに位置決めすることなく連続的に行うため、短時間にしかも比較的詳細な膜厚分布が得られる。CMP加工条件設定部165では、得られたウェハ面内膜厚分布に基づき研磨ヘッド加圧力、研磨ヘッド加圧分布、加工時間等の設定を行う。CMP加工部163はCMP加工条件設定部165の設定に従い、CMP加工を行う。ウェハ毎に、毎回同様の処理を行うことにより、ウェハの面内均一性が図れると共に、ウェハ間の膜厚均一性の向上も図れる。又、転送部167によって面内膜厚分布をCMP工程以降のエッチング装置166に転送し、エッチング装置166における加工条件の最適化のために使用する。
【0028】
次に本発明の第5実施形態として、図15により、半導体デバイスの製造ラインで、成膜装置161、及びその後のCMP装置162で、プロセスを最適化する方法を示す。成膜装置161の成膜部173で成膜されたウェハは、成膜装置に組み込まれた膜厚計測装置174においてin−lineで膜厚計測を行う。膜厚計測はCMP装置162に組み込まれた膜厚計測装置164と同様、ウェハ上の、実際のデバイスパターン上で特定のパターンに位置決めすることなく連続的に行い、短時間で比較的詳細な膜厚分布を得る。成膜条件設定部175では、得られたウェハ面内膜厚分布に基づき、ガス流量、成膜時間等の成膜条件の設定を行う。成膜部173は成膜条件設定部175の設定に従い、成膜を行う。これにより、ウェハの面内均一性が図れると共に、ウェハ間の膜厚均一性の向上も図れる。又、転送部177によって面内膜厚分布を次工程のCMP装置162のCMP加工条件設定部165に転送する。CMP加工条件設定部165では、成膜装置161から転送された面内膜厚分布と、CMP装置162でCMP加工後、膜厚計測装置164でin−line計測された膜厚分布とからCMP加工部の研磨レートを計算し、次ウェハの研磨時間の算出に用いる。
【0029】
【発明の効果】
本発明によれば、CMP加工後、ウェハの膜厚分布を求める際、ウェハ上の計測用特定パターンに位置決めすることなく、ウェハの回転状態で分光波形を連続的に検出するため、短時間で比較的多数の計測点で膜厚計測可能となり、比較的詳細なウェハ面内膜厚分布を得ることができる。又、半導体デバイスの製造ラインで、成膜後、表面の平坦化処理工程において、CMP加工後、短時間で比較的詳細なウェハ面内膜厚分布を計測できるため、次のウェハのCMP加工における加工条件に適用することにより、CMP加工工程での均一性の最適化が図れると共に、平坦化処理工程以降のエッチング工程等の加工条件にも適用でき、高精度な半導体デバイスの製造が可能となる。
【図面の簡単な説明】
【図1】本発明の第1実施形態における膜厚計測装置の装置構成を示す概略図である。
【図2】光学系を走査して、ウェハ全面の分光波形を検出する方式を説明する概略図である。
【図3】チップ内のパターン密度と膜厚の関係を説明する概略図である。
【図4】分光波形検出時、ウェハの移動により実効的検出視野を大きくする方式を説明する概略図である。
【図5】分光波形をウェハ移動方向に連続的に検出する方式を説明する概略図である。
【図6】各計測点で複数のチップにまたがるように連続的に分光波形を検出する方式を説明する概略図である。
【図7】ウェハの移動方向の実効的検出視野を光学系の位置に応じて一定値に保つ方式を説明する概略図である。
【図8】各計測点で計測された膜厚を基にウェハ全面の膜厚分布を求める方式を説明する概略図である。
【図9】各計測点で複数の軌道で分光波形を検出し、膜厚の検出箇所を増やすことにより精度良く膜厚計測する方式を説明する概略図である。
【図10】計測点の軸方向をウェハの軸方向からずらして、チップの全領域をカバーする割合を高くする方式を説明する概略図である。
【図11】本発明の第2実施形態における膜厚計測装置の装置構成を示す概略図である。
【図12】チップとウェハの面内分布を同一膜厚計測装置で計測する方式を説明する概略図である。
【図13】本発明の第3実施形態における膜厚計測装置の装置構成を示す概略図である。
【図14】本発明の第4実施形態における半導体デバイスの製造ラインでのCMP装置におけるプロセスを示す概略図である。
【図15】本発明の第5実施形態における半導体デバイスの製造ラインでの成膜装置におけるプロセスを示す概略図である。
【符号の説明】
10…ステージ部、11…回転ステージ、12…光電センサ、13…駆動モータ、14…ウェハ、20…検出光学系、21…対物レンズ、22…ハーフミラー、23…結像レンズ、24…リレーレンズ、25…空間フィルタ、26…視野絞り、27…照明光源、28…分光器、30…光学系移動部、31…光学系移動ガイド、32…駆動モータ、40…膜厚計測処理部、41…光学系移動処理、42…分光器設定処理、43…分光波形検出処理、44…全周検出処理、45…波形補正処理、46…周波数・位相解析処理、47…膜厚算出処理、48…エリア処理、49…膜厚分布表示処理、131…X軸ステージ、132…ステージ駆動モータ、133…光学系・ステ−ジ移動処理、134…全点検出処理、135…チップ内処理、136…ウェハ面内処理、137…終了処理、150…ウェハホルダ部、151…ホルダ、152…光電センサ、153…駆動モータ、154…水槽、155…ガラス窓、156…水、161…成膜装置、162…CMP装置、163…CMP加工部、164…膜厚計測装置、165…CMP加工条件設定部、166…エッチング装置、167…転送部、173…成膜部、174…膜厚計測装置、175…成膜条件設定部、177…転送部。
Claims (21)
- 試料表面に形成された光学的に透明な膜の膜厚分布を求める方法において、試料表面に白色光を照射し、前記試料を移動させ、移動する前記試料からの反射光の分光波形を連続的に検出して、検出した前記反射光の分光波形に基づいて、前記試料の膜厚分布を求めることを特徴とする膜厚分布計測方法。
- 前記移動する試料からの反射光の分光波形を区分領域毎に連続的に検出して、検出した前記反射光の分光波形に基づいて前記区分領域内の複数箇所の膜厚を求め、求めた前記区分領域内の複数の膜厚を演算処理した結果をその区分領域の膜厚とし、前記試料上の全区分領域について膜厚を得ることにより、前記試料上の膜厚分布を求めることを特徴とする請求項1記載の膜厚分布計測方法。
- 前記演算処理を、前記区分領域内の複数の膜厚の最大値、又は最小値、又は平均値とすることを特徴とする請求項2記載の膜厚分布計測方法。
- 前記区分領域を、検出方向に長い矩形領域とすることを特徴とする請求項2又は3記載の膜厚分布計測方法。
- 前記区分領域を、検出方向に長く、検出方向に平行に複数個の矩形が並んだ領域とすることを特徴とする請求項2又は3記載の膜厚分布計測方法。
- 前記試料を回転し、前記試料からの反射光の分光波形を検出して、前記試料の膜厚分布を求めることを特徴とする請求項1から3の何れかに記載の膜厚分布計測方法。
- 前記試料を直線運動させ、前記試料からの反射光の分光波形を検出して、前記試料の膜厚分布を求めることを特徴とする請求項1から3の何れかに記載の膜厚分布計測方法。
- 前記試料を試料の一部分である製品単位領域とし、直線運動する前記製品単位領域からの反射光の分光波形を検出して、前記製品単位領域上の膜厚分布を求めることを特徴とする請求項1記載の膜厚分布計測方法。
- 前記試料を回転し、前記回転する試料からの反射光の分光波形を検出して、前記試料の膜厚分布を求め、更に、前記試料の一部分の製品単位領域を直線運動させ、前記製品単位領域からの反射光の分光波形を連続的に検出して前記製品単位領域上の膜厚分布を求めることを特徴とする請求項2記載の膜厚分布計測方法。
- 前記試料を水中で移動させ、移動する前記試料からの反射光の分光波形を連続的に検出して、前記試料の膜厚分布を求めることを特徴とする請求項1記載の膜厚分布計測方法。
- 前記試料を水中で移動させ、移動する前記試料からの反射光の分光波形を区分領域毎に連続的に検出して、前記試料上の膜厚分布を求めることを特徴とする請求項2記載の膜厚分布計測方法。
- 前記試料がウェハであることを特徴とする請求項6又は7記載の膜厚分布計測方法。
- 前記試料がウェハで、前記製品単位領域がウェハ上の1チップであることを特徴とする請求項8又は9記載の膜厚分布計測方法。
- 試料表面に形成された光学的に透明な膜に白色光を照射する照射手段と、前記照射手段により照射された前記試料から発生する反射光の分光波形を検出する検出手段と、前記試料を移動する移動手段と、前記反射光の分光波形の検出を連続的に行う制御手段と、前記検出手段により検出した前記反射光の分光波形に基づいて前記試料の膜厚を算出する膜厚算出手段と、前記膜厚算出手段より算出された膜厚に基づいて前記試料の膜厚分布を求める膜厚分布算出手段とを備えたことを特徴とする膜厚分布計測装置。
- 試料表面に形成された光学的に透明な膜に白色光を照射する照射手段と、前記照射手段により照射された前記試料から発生する反射光の分光波形を検出する検出手段と、前記試料を移動する移動手段と、前記反射光の分光波形の検出を区分領域毎に連続的に行う制御手段と、前記検出手段により検出した前記反射光の分光波形に基づいて前記試料の膜厚を区分領域毎に算出する膜厚算出手段と、前記膜厚算出手段より算出された区分領域毎の複数の膜厚から各区分領域の膜厚を求めるエリア膜厚算出手段と、前記エリア膜厚算出手段より算出された各区分領域の膜厚に基づいて前記試料上の膜厚分布を求める膜厚分布算出手段とを備えたことを特徴とする膜厚分布計測装置。
- 表面に光学的に透明な膜が形成された試料を水中に格納する手段と、前記試料表面に白色光を照射する照射手段と、前記照射手段により照射された前記試料から発生する反射光の分光波形を検出する検出手段と、前記試料を移動する移動手段と、前記反射光の分光波形の検出を連続的に行う制御手段と、前記検出手段により検出した前記反射光の分光波形に基づいて前記試料の膜厚を算出する膜厚算出手段と、前記膜厚算出手段より算出された膜厚に基づいて前記試料の膜厚分布を求める膜厚分布算出手段とを備えたことを特徴とする膜厚分布計測装置。
- 試料表面に形成された光学的に透明な膜をCMP加工する研磨手段と、試料表面に白色光を照射する照射手段と、前記照射手段により照射された前記試料から発生する反射光の分光波形を検出する検出手段と、前記試料を移動する移動手段と、前記反射光の分光波形の検出を連続的に行う制御手段と、前記検出手段により検出した前記反射光の分光波形に基づいて前記試料の膜厚を算出する膜厚算出手段と、前記膜厚算出手段より算出された膜厚に基づいて前記試料の膜厚分布を求める膜厚分布算出手段と、得られた前記膜厚分布からCMP加工の加工条件を設定する加工条件設定手段と、以降の工程のエッチング装置に前記膜厚分布を転送する膜厚転送手段とを備えたことを特徴とするCMP装置。
- 試料表面に形成された光学的に透明な膜を成膜する成膜手段と、試料表面に白色光を照射する照射手段と、前記照射手段により照射された前記試料から発生する反射光の分光波形を検出する検出手段と、前記試料を移動する移動手段と、前記反射光の分光波形の検出を連続的に行う制御手段と、前記検出手段により検出した前記反射光の分光波形に基づいて前記試料の膜厚を算出する膜厚算出手段と、前記膜厚算出手段より算出された膜厚に基づいて前記試料の膜厚分布を求める膜厚分布算出手段と、得られた前記膜厚分布から成膜装置の成膜条件を設定する成膜条件設定手段と、次工程のCMP装置に前記膜厚分布を転送する膜厚手段とを備えたことを特徴とする成膜装置。
- 薄膜デバイスの表面に形成された光学的に透明な膜を研磨する工程において、前記薄膜デバイスの研磨後、前記薄膜デバイスをステージ上で移動し、移動する前記薄膜デバイス表面に白色光を照射し、前記白色光の照射により移動する前記薄膜デバイス表面からの反射光の分光波形を連続的に検出し、検出した前記反射光の分光波形に基づいて前記薄膜デバイスの膜厚分布を求めることを特徴とする薄膜デバイスの製造方法。
- 薄膜デバイスの表面に形成された光学的に透明な膜を研磨する工程において、前記薄膜デバイスの研磨後、前記薄膜デバイスをステージ上で移動し、移動する前記薄膜デバイス表面に白色光を照射し、前記白色光の照射により移動する前記薄膜デバイス表面からの反射光の分光波形を区分領域毎に連続的に検出し、検出した前記反射光の分光波形に基づいて前記区分領域内の複数箇所の膜厚を求め、求めた前記区分領域内の複数の膜厚を演算処理した結果をその区分領域の膜厚とし、前記薄膜デバイス上の全区分領域について膜厚を得ることにより、前記薄膜デバイスの膜厚分布を求めることを特徴とする薄膜デバイスの製造方法。
- 薄膜デバイスの表面に形成された光学的に透明な膜を研磨する工程において、前記薄膜デバイスの研磨後、前記薄膜デバイスを水中で移動することにより、前記薄膜デバイスの膜厚分布を求めることを特徴とする請求項20記載の薄膜デバイスの製造方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002166460A JP2004012302A (ja) | 2002-06-07 | 2002-06-07 | 膜厚分布計測方法及びその装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002166460A JP2004012302A (ja) | 2002-06-07 | 2002-06-07 | 膜厚分布計測方法及びその装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004012302A true JP2004012302A (ja) | 2004-01-15 |
Family
ID=30433994
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002166460A Pending JP2004012302A (ja) | 2002-06-07 | 2002-06-07 | 膜厚分布計測方法及びその装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004012302A (ja) |
Cited By (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006098397A (ja) * | 2004-09-03 | 2006-04-13 | Seikitokyu Kogyo Co Ltd | 路面状態測定システム及び路面状態測定装置 |
| WO2006051243A1 (fr) * | 2004-11-15 | 2006-05-18 | S.O.I. Tec Silicon On Insulator Technologies | Procede et appareil de mesure de plaques de semi-conducteur |
| JP2011176342A (ja) * | 2011-04-11 | 2011-09-08 | Ebara Corp | 研磨方法及び配線形成方法 |
| JP2012510169A (ja) * | 2008-11-26 | 2012-04-26 | アプライド マテリアルズ インコーポレイテッド | フィードバックおよびフィードフォワードプロセス制御のために光計測学を使用すること |
| JP2013145239A (ja) * | 2006-09-29 | 2013-07-25 | Lam Research Corporation | 基板を位置決めして検査するためのオフセット補正方法および装置 |
| JP2013531227A (ja) * | 2010-05-18 | 2013-08-01 | マーポス、ソチエタ、ペル、アツィオーニ | 物体の厚さを干渉法により光学的に計測する方法及び装置 |
| JP2015020242A (ja) * | 2013-07-19 | 2015-02-02 | 株式会社荏原製作所 | 研磨装置および研磨状態監視方法 |
| US8951813B2 (en) | 2012-07-10 | 2015-02-10 | Ebara Corporation | Method of polishing a substrate having a film on a surface of the substrate for semiconductor manufacturing |
| JP2015079984A (ja) * | 2005-08-22 | 2015-04-23 | アプライド マテリアルズ インコーポレイテッドApplied Materials,Incorporated | 化学機械的研磨のスペクトルに基づく監視のための装置および方法 |
| WO2015156084A1 (ja) * | 2014-04-08 | 2015-10-15 | 株式会社日立ハイテクノロジーズ | 検査装置及び検査条件決定方法 |
| JP2016165423A (ja) * | 2015-03-10 | 2016-09-15 | 富士フイルム株式会社 | 計測システム、計測方法及び計測プログラム |
| US9583405B2 (en) | 2005-08-22 | 2017-02-28 | Applied Materials, Inc. | Endpointing detection for chemical mechanical polishing based on spectrometry |
| JP2017072583A (ja) * | 2015-08-26 | 2017-04-13 | 財團法人工業技術研究院Industrial Technology Research Institute | 表面測定装置及びその方法 |
| JP2017146288A (ja) * | 2016-02-15 | 2017-08-24 | 信越半導体株式会社 | 膜厚分布測定方法 |
| WO2017141299A1 (ja) * | 2016-02-15 | 2017-08-24 | 信越半導体株式会社 | 膜厚分布測定方法 |
| JP2017534186A (ja) * | 2014-11-04 | 2017-11-16 | ヘッドウェイテクノロジーズ インコーポレイテッド | 適応フィードバック制御研磨方法 |
| US9835449B2 (en) | 2015-08-26 | 2017-12-05 | Industrial Technology Research Institute | Surface measuring device and method thereof |
| US9970754B2 (en) | 2015-08-26 | 2018-05-15 | Industrial Technology Research Institute | Surface measurement device and method thereof |
| US9999955B2 (en) | 2013-07-11 | 2018-06-19 | Ebara Corporation | Polishing apparatus and polished-state monitoring method |
| CN111250183A (zh) * | 2020-02-17 | 2020-06-09 | 北京中科生仪科技有限公司 | 一种微流控系统用注液泵驱动装置 |
| WO2022180829A1 (ja) * | 2021-02-26 | 2022-09-01 | 日本電信電話株式会社 | 非接触測定法 |
-
2002
- 2002-06-07 JP JP2002166460A patent/JP2004012302A/ja active Pending
Cited By (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006098397A (ja) * | 2004-09-03 | 2006-04-13 | Seikitokyu Kogyo Co Ltd | 路面状態測定システム及び路面状態測定装置 |
| JP4668736B2 (ja) * | 2004-09-03 | 2011-04-13 | 世紀東急工業株式会社 | 路面状態測定システム |
| US7375830B2 (en) | 2004-11-15 | 2008-05-20 | S.O.I.Tec Silicon On Insulator Technologies | Method and instrument for measuring semiconductor wafers |
| FR2878075A1 (fr) * | 2004-11-15 | 2006-05-19 | Soitec Silicon On Insulator | Procede et appareil de mesure de plaques de semi-conducteur |
| JP2008520092A (ja) * | 2004-11-15 | 2008-06-12 | エス オー イ テク シリコン オン インシュレータ テクノロジース | 半導体ウェーハを測定する方法および装置 |
| JP4646986B2 (ja) * | 2004-11-15 | 2011-03-09 | エス オー イ テク シリコン オン インシュレータ テクノロジース | 半導体ウェーハを測定する方法および装置 |
| WO2006051243A1 (fr) * | 2004-11-15 | 2006-05-18 | S.O.I. Tec Silicon On Insulator Technologies | Procede et appareil de mesure de plaques de semi-conducteur |
| US10276460B2 (en) | 2005-08-22 | 2019-04-30 | Applied Materials, Inc. | Endpointing detection for chemical mechanical polishing based on spectrometry |
| US11183435B2 (en) | 2005-08-22 | 2021-11-23 | Applied Materials, Inc. | Endpointing detection for chemical mechanical polishing based on spectrometry |
| US9583405B2 (en) | 2005-08-22 | 2017-02-28 | Applied Materials, Inc. | Endpointing detection for chemical mechanical polishing based on spectrometry |
| US11715672B2 (en) | 2005-08-22 | 2023-08-01 | Applied Materials, Inc. | Endpoint detection for chemical mechanical polishing based on spectrometry |
| JP2015079984A (ja) * | 2005-08-22 | 2015-04-23 | アプライド マテリアルズ インコーポレイテッドApplied Materials,Incorporated | 化学機械的研磨のスペクトルに基づく監視のための装置および方法 |
| JP2013145239A (ja) * | 2006-09-29 | 2013-07-25 | Lam Research Corporation | 基板を位置決めして検査するためのオフセット補正方法および装置 |
| JP2012510169A (ja) * | 2008-11-26 | 2012-04-26 | アプライド マテリアルズ インコーポレイテッド | フィードバックおよびフィードフォワードプロセス制御のために光計測学を使用すること |
| JP2013531227A (ja) * | 2010-05-18 | 2013-08-01 | マーポス、ソチエタ、ペル、アツィオーニ | 物体の厚さを干渉法により光学的に計測する方法及び装置 |
| US9079283B2 (en) | 2010-05-18 | 2015-07-14 | Marposs Societa′ per Azioni | Method and apparatus for optically measuring by interferometry the thickness of an object |
| JP2011176342A (ja) * | 2011-04-11 | 2011-09-08 | Ebara Corp | 研磨方法及び配線形成方法 |
| US8951813B2 (en) | 2012-07-10 | 2015-02-10 | Ebara Corporation | Method of polishing a substrate having a film on a surface of the substrate for semiconductor manufacturing |
| US9999955B2 (en) | 2013-07-11 | 2018-06-19 | Ebara Corporation | Polishing apparatus and polished-state monitoring method |
| JP2015020242A (ja) * | 2013-07-19 | 2015-02-02 | 株式会社荏原製作所 | 研磨装置および研磨状態監視方法 |
| WO2015156084A1 (ja) * | 2014-04-08 | 2015-10-15 | 株式会社日立ハイテクノロジーズ | 検査装置及び検査条件決定方法 |
| JP2017534186A (ja) * | 2014-11-04 | 2017-11-16 | ヘッドウェイテクノロジーズ インコーポレイテッド | 適応フィードバック制御研磨方法 |
| JP2016165423A (ja) * | 2015-03-10 | 2016-09-15 | 富士フイルム株式会社 | 計測システム、計測方法及び計測プログラム |
| US10962400B2 (en) | 2015-03-10 | 2021-03-30 | Fujifilm Corporation | Measurement system, and measurement method |
| WO2016143514A1 (ja) * | 2015-03-10 | 2016-09-15 | 富士フイルム株式会社 | 計測システム、計測方法及び計測プログラム |
| US9835449B2 (en) | 2015-08-26 | 2017-12-05 | Industrial Technology Research Institute | Surface measuring device and method thereof |
| US9970754B2 (en) | 2015-08-26 | 2018-05-15 | Industrial Technology Research Institute | Surface measurement device and method thereof |
| JP2017072583A (ja) * | 2015-08-26 | 2017-04-13 | 財團法人工業技術研究院Industrial Technology Research Institute | 表面測定装置及びその方法 |
| WO2017141299A1 (ja) * | 2016-02-15 | 2017-08-24 | 信越半導体株式会社 | 膜厚分布測定方法 |
| JP2017146288A (ja) * | 2016-02-15 | 2017-08-24 | 信越半導体株式会社 | 膜厚分布測定方法 |
| CN111250183A (zh) * | 2020-02-17 | 2020-06-09 | 北京中科生仪科技有限公司 | 一种微流控系统用注液泵驱动装置 |
| WO2022180829A1 (ja) * | 2021-02-26 | 2022-09-01 | 日本電信電話株式会社 | 非接触測定法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2004012302A (ja) | 膜厚分布計測方法及びその装置 | |
| JP3932836B2 (ja) | 薄膜の膜厚計測方法及びその装置並びにそれを用いたデバイスの製造方法 | |
| CN109716494B (zh) | 使用颜色测量的基板的厚度测量 | |
| JP4842513B2 (ja) | 半導体製造方法及びその装置 | |
| TWI757154B (zh) | 用於cmp監控的彩色成像 | |
| JP4460659B2 (ja) | 薄膜の膜厚計測方法及びその装置並びにそれを用いた薄膜デバイスの製造方法及びその製造装置 | |
| US6806970B2 (en) | Thin film thickness measuring method and apparatus, and method and apparatus for manufacturing a thin film device using the same | |
| JP5223668B2 (ja) | 調整方法及び基板処理方法 | |
| US7280233B2 (en) | Method and apparatus for inspecting an edge exposure area of a wafer | |
| JP2000310512A (ja) | 薄膜の膜厚計測方法及びその装置並びにそれを用いた薄膜デバイスの製造方法及びその装置 | |
| JP2011519735A (ja) | 研磨中に基板縁部の厚さを測定する方法および装置 | |
| TW202211072A (zh) | 根據基於機器學習的基板圖像處理作膜厚度估測 | |
| CN109669321B (zh) | 一种晶圆洗边系统和晶圆洗边方法 | |
| JP2003249472A (ja) | 膜厚計測方法および膜厚計測装置および薄膜デバイスの製造方法 | |
| JP4408244B2 (ja) | 基板研磨方法および基板研磨装置 | |
| JP2005337927A (ja) | 膜厚計測方法および膜厚計測装置 | |
| CN111684577A (zh) | 使用亮度直方图的残留物检测 | |
| WO2005095928A1 (en) | Method and apparatus for measurement of thin films and residues on semiconductor substrates | |
| US20240151653A1 (en) | System and method for detecting a defect in a specimen | |
| JP2001225262A (ja) | 研磨状態測定装置及び測定方法 | |
| JP2004191107A (ja) | 膜厚計測方法及びその装置 | |
| KR20100073541A (ko) | 웨이퍼 박막 두께 측정장치 | |
| KR20050086155A (ko) | 웨이퍼의 에지 노광 영역 검사 방법 및 장치 | |
| JP2003347191A (ja) | 基板処理装置および膜厚測定方法 | |
| KR20240001252A (ko) | 워크의 양면 연마 장치 및 양면 연마 방법 |