EP4257739A1 - Nähmaschine - Google Patents
Nähmaschine Download PDFInfo
- Publication number
- EP4257739A1 EP4257739A1 EP23166891.4A EP23166891A EP4257739A1 EP 4257739 A1 EP4257739 A1 EP 4257739A1 EP 23166891 A EP23166891 A EP 23166891A EP 4257739 A1 EP4257739 A1 EP 4257739A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- needle bar
- sewing
- axis
- sewing machine
- needle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000009958 sewing Methods 0.000 title claims abstract description 93
- 230000015572 biosynthetic process Effects 0.000 claims abstract description 13
- 230000005540 biological transmission Effects 0.000 description 5
- 208000012886 Vertigo Diseases 0.000 description 3
- 230000001360 synchronised effect Effects 0.000 description 3
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
Images







Classifications
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B21/00—Sewing machines with devices for automatically controlling movement of work-carrier relative to stitch-forming mechanism in order to obtain particular configuration of seam, e.g. programme-controlled for sewing collars, for attaching pockets
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B55/00—Needle holders; Needle bars
- D05B55/14—Needle-bar drives
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B29/00—Pressers; Presser feet
- D05B29/06—Presser feet
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B55/00—Needle holders; Needle bars
- D05B55/10—Needle bars for multiple-needle sewing machines
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B57/00—Loop takers, e.g. loopers
- D05B57/08—Loop takers, e.g. loopers for lock-stitch sewing machines
- D05B57/10—Shuttles
- D05B57/14—Shuttles with rotary hooks
- D05B57/143—Vertical axis type
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B69/00—Driving-gear; Control devices
- D05B69/02—Mechanical drives
Definitions
- the invention relates to a sewing machine.
- Sewing machines are known, for example, from EP 3 392 388 A1 , the EP 2 028 311 A2 and the DE 199 51 127 C2 .
- the DE 102 38 708 A1 reveals a buttonhole sewing machine.
- the DE 10 2015 101 412 A1 and the EP 2 476 789 A2 reveal a sewing machine.
- the EP 2 565 313 A1 reveals a two-needle sewing machine.
- a sewing machine with a needle bar rotary drive for specifying a sewing direction, without having to do without a presser foot for fixing the sewing material during stitch formation.
- the result is a sewing machine with a flexibly predeterminable sewing direction, with the sewing material being securely fixed by the pressure foot during sewing.
- the sewing machine has a sewing drive that specifies a length along the needle bars ongoing stitch formation movement of the needle bar.
- a choice of sewing direction results from the rotational orientation of the needle bar relative to the throat plate. This allows flexible seam geometries to be ensured, which can be used in particular when processing sewing programs, especially controlled via a CNC control. In particular, automatic sewing of seams that run along path curves is possible.
- the presser foot can be designed as a transport foot.
- a presser end of the presser foot, with which the presser foot comes into contact with the material to be sewn when fixing, can be designed in such a way that it comes into contact with the material to be sewn close to the throat plate opening for the passage of the needle during stitch formation.
- a rotation-proof mounting of the presser foot on the needle bar according to claim 2 ensures that a position of the presser foot automatically adapts to the sewing direction selected via the needle bar rotation.
- a lifting drive according to claim 3 enables the sewing operation to be adapted to sewn material of different thicknesses.
- a stroke height of the stroke adjustment can be in the range between 0.5 mm and 50 mm, for example in the range between 5 mm and 10 mm.
- a lifting drive according to claim 4 allows precise stroke adjustment.
- the lifting drive can be designed as a stepper motor.
- the lifting drive can be controlled via a control program.
- a turntable according to claim 5 makes it possible to mount drive components of the lifting drive fixed to the frame, so that the needle bar rotary assembly rotates relative to these drive components fixed to the frame when the needle bar rotary drive is adjusted.
- the connection of the lifting drive to the needle bar rotating assembly for stroke displacement can be provided via a circumferential groove in the turntable.
- a further object of the invention is to develop a sewing machine in such a way that a sewing direction can be flexibly specified even for two-thread sewing.
- a sewing drive can in turn be used for the stitch-forming movement of the needle bar, whereby the gripper sewing drive for the stitch-forming movement of the hook and the sewing drive for the stitch-forming movement of the needle bar can be derived from one and the same drive source.
- the needle bar rotary drive and the hook assembly rotary drive ensure that both the needle bar and the hook assembly interact correctly with each other to form two-thread stitches, regardless of a current rotational position and therefore regardless of the current sewing direction.
- a two-thread lockstitch can be sewn with the sewing machine.
- the needle bar rotary drive can work synchronized with the hook assembly rotary drive.
- the needle bar rotary drive can work synchronized with the sewing drive.
- a relative orientation of the gripper axis to the gripper assembly axis according to claim 7 enables the use of a gripper that rotates about a gripper axis that runs parallel to a needle bar axis.
- the spacing of the gripper assembly axis from the gripper axis makes it possible to ensure the correct position of the gripper in relation to the needle bar for correct stitch formation, regardless of the sewing direction set via the rotary drives.
- a differential gear unit allows an adjustment of a relative rotational position of a gripper tip of the gripper about the gripper axis depending on the rotational position of the gripper assembly about the gripper assembly axis. This ensures that the gripper is not only correctly oriented in terms of the arrangement of the entire gripper at a piercing point of the needle tip, but also that the gripper tip is in place in the correct phase and synchronized for stitch-forming interaction with the sewing needle, regardless of the instantaneous position set via the rotary drives .
- An embodiment with a common rotary drive motor for the needle bar rotary drive on the one hand and the Geifer assembly rotary drive on the other hand according to claim 9 is cost-reducing, and the drives associated with it can always move in the correct phase. Synchronicity between the needle bar rotary drive and the gripper assembly rotary drive can then be ensured via a mechanical coupling with the common drive motor.
- a deflection gear according to claim 10 enables a flexible drive force transmission to the output-side components of the needle bar rotary drive on the one hand and the Geifer assembly rotary drive on the other hand.
- the sewing machine with the needle bar rotary drive and the presser foot can also have a gripper assembly rotary drive.
- a sewing machine 1 (cf. Figure 1 ) has a C-shaped basic structure with an arm 2, a base plate 3 and a stand 4 connecting the arm 2 and the base plate 3.
- the sewing machine 1 has stitch forming tools in the form of a sewing needle 5, which is held by a needle bar 6, and a gripper 7.
- the needle bar 6 is mounted in a bearing sleeve 6b via several sliding blocks 6a.
- the sewing needle 5 is used to guide an upper thread.
- a stitch plate 5a of the sewing machine 1 has an opening for the sewing needle 5 to pass through during stitch formation.
- a presser foot 8 also known as a sewing foot, is used to fix sewing material in the area of the needle plate during stitch formation.
- the needle bar 6 and the presser foot 8 are mounted on a head 2a of the sewing machine 1, which forms an end portion of the arm 2.
- the presser foot 8 can also perform a hopping movement synchronously with the sewing drive. This hopping movement can be specified via the lifting drive 10. A hopping stroke in this hopping movement can be in the range between 0.5 mm and 10 mm.
- the gripper 7 is mounted under the throat plate in the base plate 3.
- a gripper axis 9, around which the gripper 7 rotates when forming the stitch, runs vertically (see for example Figure 7 ).
- the gripper 7 serves to guide a lower thread that interacts with the upper thread when forming the stitches and has a lower thread supply in the form of a spool.
- the x direction is running along a sewing direction Figure 2 to the left.
- the y-direction is horizontal in the Figure 1 to the left and perpendicular to the drawing plane Figure 2 .
- the z direction runs vertically in the Figures 1 and 2 up.
- the sewing machine 1 has a lifting drive 10 for adjusting the stroke of the presser foot 8 along the z-direction.
- Figure 2 shows the presser foot 8 in a lifting position lowered to the level of the throat plate.
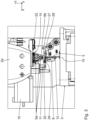
- Figure 3 shows the presser foot 8 in a position compared to the lifting position Figure 2 raised lifting position.
- the lifting drive 10 has an actuator that can be designed as a stepper motor.
- a gear ring is placed on a motor shaft of the lifting drive 10 and interacts with a rack section of a presser foot rod 11 of the presser foot 8.
- a pusher end 12 that interacts with the material to be sewn is also designed as a sleeve for the sewing needle 5 to pass through.
- a lifting adjustment of the presser foot can also be derived from an arm shaft of the sewing machine 1.
- a rotary drive motor 13 which is mounted on the base plate side, provides a common drive source on the one hand for a needle bar rotary drive 14 for rotating the needle bar 6 and the presser foot 8 about a vertical needle bar axis 15 and on the other hand for a gripper assembly rotary drive 16 for rotating a Gripper assembly 17 containing gripper 7 about a gripper assembly axis 18 (cf. for example Figure 7 ).
- the gripper assembly axis 18 runs parallel to the gripper axis 9 and is spaced apart from it. Both axes 9, 18 run parallel to the z-axis, i.e. vertically.
- the gripper assembly axis 18 coincides with the needle bar axis 15.
- the rotary drive motor 13 is in operative connection via a toothed belt 19 with a rotary drive shaft 20, which runs along the y-axis (cf. Figure 8 ).
- the rotary drive shaft 20 is in operative connection with a toothed ring 22 on the needle bar side with a vertical axis of rotation via a further toothed belt 21, which is initially guided along the stand 4 and then along the arm 2.
- the needle bar 6 and, on the other hand, the presser foot bar 11 are connected in a rotationally fixed manner to the toothed ring 22 on the needle bar side.
- a thread lever assembly 23 is arranged in the head 2a above the needle bar 6 (cf. Figure 1 ). This is designed in such a way that, regardless of the rotational position of the needle bar 6 about the needle bar axis 15, it ensures that the upper thread is knotted with the lower thread when forming the stitches and that the thread is pulled correctly.
- a thread tension plate 25 is mounted on the arm 2 of the sewing machine 1 adjacent to a thread lever 24 of the thread lever assembly 23.
- Tensioning units 26 for specifying a thread tension of the upper thread which is not shown in the drawing, are mounted on the thread tension plate 25.
- This turntable 28 is in the Figures 2 and 3 shown in a side view.
- the turntable 28 is connected to the ring gear 22 and to the needle bar 6 in a rotationally fixed manner.
- the turntable 28 is firmly connected to the presser foot 8.
- the lifting drive 10 is fixed to a frame of the sewing machine 1, namely to a head-side frame element.
- the turntable 28 has one in the Figure 2 indicated circumferential groove 29, into which a driver 30 of the presser foot rod 11 engages to shift the stroke of the presser foot 8.
- the lifting drive 10 can be connected to the turntable 28 via a shoulder.
- the rotary drive shaft 20 is operatively connected to a ring gear of a hollow shaft section 32 via a further toothed belt 31.
- This hollow shaft section 32 is in operative connection via a pair of gears 34, 35, a gear shaft 36, another pair of gears 37, 38 with a spur toothing 39 of an assembly housing 40 of the gripper assembly 17.
- the gripper 7 can be rotated about the gripper axis 9 in the assembly housing 40.
- the assembly housing 40 in turn can be rotated about the gripper assembly axis 18.
- An up and down movement of the needle bar 6 parallel to the z-axis and a rotation of the gripper 7 about the gripper axis 9, each for stitch formation, is derived from a sewing drive motor 41, which is also mounted on the base plate side.
- the latter interacts with a core shaft 43 of the gripper drive shaft 33 via a toothed belt 42.
- a locking clutch 42b is arranged between a toothed ring 42a, on which the toothed belt 42 engages, and the core shaft 43, which separates the core shaft 43 from the sewing drive motor 41 in overload situations.
- the core shaft 43 is in the Figure 7 non-visible, also vertical gripper shaft in operative connection, which is aligned with the gripper axis 9.
- the differential gear unit 44 serves to adapt a relative rotational position of a gripper tip about the gripper axis 9 depending on a respective rotational position of the gripper assembly 17 about the gripper assembly axis 18.
- the differential gear unit 44 ensures that the transmission shaft 45 is rotated relative to the core shaft 43 is possible to enable a corresponding adjustment of the relative rotational position of the gripper tip.
- the rotation of the transmission shaft 45 to the core shaft 43 by means of the differential gear unit 44 is positively controlled.
- the relative rotational position of the gripper tip about the gripper axis 9 is adjusted.
- the sewing drive of the needle bar is ensured via the drive motor 41 on the needle bar via an arm shaft 48 and a crank deflection gear which is housed in the head 2a
- Figure 4 shows the needle bar 6 with the presser foot 8 and the gripper assembly 17 in a basic rotation position "0°", in which sewing takes place along the x-axis.
- a gripper tip of the gripper 7 is aligned with the needle bar axis 15.
- Figure 5 shows a comparison to the rotation position Figure 4 Rotary position rotated by 90 ° counterclockwise, which was brought about via the rotary drive motor 13, on the one hand, acting on the needle bar rotary drive 14 and, on the other hand, acting on the gripper assembly rotary drive 16.
- Both the needle bar rotating assembly 27 with the needle bar 6 and the presser foot 8 as well as the gripper assembly 17 are rotated synchronously with one another on the one hand about the needle bar axis 15 and on the other hand about the gripper assembly axis 18 by 90 ° counterclockwise. Due to the effect of the differential gear unit 44, it is also ensured in this "90°" rotation position that the hook tip faces the needle bar axis 15 for correct stitch formation.
- a two-thread lockstitch can be sewn with the sewing machine 1.
- the components of the sewing machine 1 are in signal connection with a central control device. This can be a CNC control.
Landscapes
- Engineering & Computer Science (AREA)
- Textile Engineering (AREA)
- Mechanical Engineering (AREA)
- Sewing Machines And Sewing (AREA)
Abstract
Description
- Der Inhalt der deutschen Patentanmeldung
DE 10 2022 203 472.4 wird durch Bezugnahme hierin aufgenommen. - Die Erfindung betrifft eine Nähmaschine.
- Nähmaschinen sind beispielsweise bekannt aus der
EP 3 392 388 A1 , derEP 2 028 311 A2 und derDE 199 51 127 C2 . DieDE 102 38 708 A1 offenbart eine Knopfloch-Nähmaschine. DieDE 10 2015 101 412 A1 und dieEP 2 476 789 A2 offenbaren eine Nähmaschine. DieEP 2 565 313 A1 offenbart eine Zweinadel-Nähmaschine. - Es ist eine Aufgabe der vorliegenden Erfindung, eine Nähmaschine der eingangs genannten Art derart weiterzubilden, dass ein flexibler Nähbetrieb insbesondere mit wechselnder Nährichtung möglich ist, der eine Abarbeitung insbesondere von CNC-Steuerprogrammen ermöglicht.
- Diese Aufgabe ist erfindungsgemäß gelöst durch eine Nähmaschine mit den im Anspruch 1 angegebenen Merkmalen.
- Erfindungsgemäß wurde erkannt, dass es möglich ist, eine Nähmaschine mit einem Nadelstangen-Drehantrieb zur Vorgabe einer Nährichtung bereitzustellen, ohne dass deswegen auf einen Drückerfuß zur Nähgutfixierung während der Stichbildung verzichtet werden muss. Es resultiert eine Nähmaschine mit flexibel vorgebbarer Nährichtung, wobei während des Nähens ein sicheres Fixieren des Nähguts durch den Drückfuß erfolgt. Die Nähmaschine hat einen Nähantrieb zur Vorgabe einer längs der Nadelstangen verlaufenden Stichbildungsbewegung der Nadelstange. Über eine jeweilige Drehorientierung der Nadelstange relativ zur Stichplatte ergibt sich eine Wahl der Nährichtung. Hierüber lassen sich flexible Nahtgeometrien gewährleisten, was insbesondere bei der Abarbeitung von Nähprogrammen, insbesondere gesteuert über eine CNC-Steuerung, genutzt werden kann. Insbesondere ist ein automatisches Nähen von Nähten, die entlang von Bahnkurven verlaufen möglich.
- Der Drückerfuß kann als Transportfuß ausgeführt sein.
- Ein Drückerende des Drückerfußes, mit dem der Drückerfuß beim Fixieren mit dem Nähgut in Kontakt kommt, kann derart gestaltet sein, dass es nahe benachbart zur Stichplatten-Öffnung zum Durchtritt der Nadel während der Stichbildung mit dem Nähgut in Kontakt kommt.
- Eine drehfeste Montage des Drückerfußes an der Nadelstange nach Anspruch 2 gewährleistet, dass sich eine Position des Drückerfußes automatisch an die über die Nadelstangendrehung jeweils gewählte Nährichtung anpasst.
- Ein Hubantrieb nach Anspruch 3 ermöglicht eine Anpassung des Nähbetriebs an Nähgut unterschiedlicher Dicke. Eine Hubhöhe der Hubverstellung kann im Bereich zwischen 0,5 mm und 50 mm liegen, beispielsweise im Bereich zwischen 5 mm und 10 mm.
- Ein Hubantrieb nach Anspruch 4 erlaubt eine präzise Hubverstellung. Der Hubantrieb kann als Schrittmotor ausgeführt sein. Der Hubantrieb kann über ein Steuerungsprogramm angesteuert sein.
- Eine Drehscheibe nach Anspruch 5 ermöglicht es, Antriebskomponenten des Hubantriebes rahmenfest zu montieren, sodass sich die Nadelstangen-Drehbaugruppe beim Verstellen des Nadelstangen-Drehantriebs relativ zu diesen rahmenfesten Antriebskomponenten verdreht. Die Verbindung des Hubantriebes mit der Nadelstangen-Drehbaugruppe zur Hubverlagerung kann über eine Umfangsnut der Drehscheibe gegeben sein.
- Eine weitere Aufgabe der Erfindung ist es, eine Nähmaschine derart weiterzubilden, dass eine Nährichtung auch beim Zweifaden-Nähen flexibel vorgegeben werden kann.
- Diese Aufgabe ist erfindungsgemäß gelöst durch eine Nähmaschine mit dem im Anspruch 6 angegebenen Merkmalen.
- Zur Stichbildungsbewegung der Nadelstange kann wiederum ein Nähantrieb zum Einsatz kommen, wobei der Greifer-Nähantrieb zur Stichbildungsbewegung des Greifers und der Nähantrieb zur Stichbildungsbewegung der Nadelstange von ein und derselben Antriebsquelle abgeleitet werden können.
- Der Nadelstangen-Drehantrieb und der Greifer-Baugruppen-Drehantrieb gewährleisten, dass sowohl die Nadelstange als auch die Greifer-Baugruppe zur Zweifaden-Stichbildung unabhängig von einer momentanen Drehposition und damit unabhängig von der momentanen Nährichtung miteinander zur Stichbildung korrekt zusammenwirken.
- Mit der Nähmaschine kann insbesondere ein Zweifaden-Steppstich genäht werden.
- Der Nadelstangen-Drehantrieb kann synchronisiert zum Greifer-Baugruppen-Drehantrieb arbeiten. Der Nadelstangen-Drehantrieb kann synchronisiert zum Nähantrieb arbeiten.
- Eine Relativorientierung der Greiferachse zur Greifer-Baugruppen-Achse nach Anspruch 7 ermöglicht den Einsatz eines Greifers, der sich um eine Greiferachse dreht, die parallel zu einer Nadelstangenachse verläuft. Die Beabstandung der Greifer-Baugruppen-Achse zur Greiferachse ermöglicht es, die Lagerichtigkeit des Greifers zur Nadelstange zur korrekten Stichbildung unabhängig von der jeweils über die Drehantriebe eingestellte Nährichtung sicherzustellen.
- Eine Differenzialgetriebeeinheit nach Anspruch 8 erlaubt eine Anpassung einer relativen Drehposition einer Greiferspitze des Greifers um die Greiferachse abhängig von der Drehposition der Greifer-Baugruppe um die Greifer-Baugruppen-Achse. Dies stellt sicher, dass der Greifer nicht nur hinsichtlich der Anordnung des gesamten Greifers zu einem Durchstoßpunkt der Nadelspitze korrekt orientiert ist, sondern dass auch die Greiferspitze unabhängig von der über die Drehantriebe eingestellten Momentanposition phasenrichtig synchronisiert zum stichbildenden Zusammenwirken mit der Nähnadel an Ort und Stelle ist.
- Eine Ausgestaltung mit einem gemeinsamen Dreh-Antriebmotor für den Nadelstangen-Drehantrieb einerseits und dem Geifer-Baugruppen-Drehantrieb andererseits nach Anspruch 9 ist kostensenkend, und die damit verbundenen Antriebe können sich stets phasenrichtig bewegen. Eine Synchronität zwischen dem Nadelstangen-Drehantrieb und dem Greifer-Baugruppen-Drehantrieb kann dann über eine mechanische Kopplung mit dem gemeinsamen Antriebsmotor gewährleistet sein.
- Ein Umlenkgetriebe nach Anspruch 10 ermöglicht eine flexible Antriebskraftübertragung hin zu den abtriebsseitigen Komponenten des Nadelstangen-Drehantriebs einerseits und des Geifer-Baugruppen-Drehantriebs andererseits.
- Die vorstehend erläuterten Gestaltungsmerkmale der Nähmaschine können in beliebiger Kombination zum Einsatz kommen. Beispielsweise kann die Nähmaschine mit dem Nadelstangen-Drehantrieb und dem Drückerfuß auch einen Greifer-Baugruppen-Drehantrieb aufweisen.
- Ein Ausführungsbeispiel der Erfindung wird nachfolgend anhand der Zeichnungen näher erläutert. In dieser zeigen:
- Figur 1
- eine bedienerseitige perspektivische Ansicht einer Nähmaschine mit einem Nadelstangen-Drehantrieb zum Drehen einer Nadelstange und eines Drückerfußes um eine Nadelstangenachse und mit einem Greifer-Baugruppen-Drehantrieb zum Drehen einer Greifer-Baugruppe um eine nicht mit einer Greiferachse zusammenfallende Greifer-Baugruppen-Achse;
- Figur 2
- vergrößert und in einem Details des Nadelstangen-Drehantriebs zeigenden Ausschnitt eine Ansicht gemäß Blickrichtung II in
Figur 1 , wobei der Drückerfuß auf ein Niveau einer Stichplatte der Nähmaschine abgesenkt ist; - Figur 3
- in einer zu
Figur 2 ähnlichen Darstellung die Nähmaschine mit dem auf ein erhöhtes Niveau angehobenem Drückerfuß; - Figur 4
- aus einer Blickrichtung ähnlich der
Figur 1 vergrößert Details sowohl des Nadelstangen-Drehantriebs als auch des Greifer-Baugruppen-Drehantriebs in einem Stichbildungsbereich mit der Nadelstange und einem Greifer in einer Dreh-Grundstellung "0°" entsprechend derFigur 1 ; - Figur 5
- in einer zu
Figur 4 ähnlichen Darstellung den Nadelstangen-Drehantriebs und den Greifer-Baugruppen-Drehantrieb in einer im Vergleich zurFigur 4 um 90° entgegen dem Uhrzeigersinn verdrehten Drehstellung "90°"; - Figur 6
- eine Getriebebaugruppe des Greifer-Baugruppen-Drehantriebs einschließlich eines Greifer-Nähantriebs zum Drehen des Greifers um eine Greiferachse;
- Figur 7
- in einer zur
Figur 6 ähnlichen, perspektivischen Darstellung die Baugruppe nachFigur 6 mit abgenommenen Gehäusekomponenten; - Figur 8
- eine bedienerseitige Ansicht von Hauptkomponenten der Nähmaschine mit zusätzlicher Veranschaulichung einer Zahnriemen-Führung zum Antrieb des Nadelstangen-Drehantriebs.
- Eine Nähmaschine 1 (vgl.
Figur 1 ) hat einen C-förmigen Grundaufbau mit einem Arm 2, einer Grundplatte 3 und einem den Arm 2 und die Grundplatte 3 verbindenden Ständer 4. - Die Nähmaschine 1 hat Stichbildungswerkzeuge in Form einer Nähnadel 5, die von einer Nadelstange 6 gehalten wird, und eines Greifers 7. Die Nadelstange 6 ist über mehrere Gleitsteine 6a in einer Lagerhülse 6b gelagert.
- Die Nähnadel 5 dient der Führung eines Oberfadens. Eine Stichplatte 5a der Nähmaschine 1 hat eine Öffnung zum Durchtritt der Nähnadel 5 während der Stichbildung.
- Ein auch als Nähfuß bezeichneter Drückerfuß 8 dient zum Fixieren von Nähgut während der Stichbildung im Bereich der Stichplatte. Die Nadelstange 6 und der Drückerfuß 8 sind an einem Kopf 2a der Nähmaschine 1 montiert, der einen Endabschnitt des Arms 2 bildet.
- Der Drückerfuß 8 kann zudem synchron mit dem Nähantrieb eine Hüpferbewegung durchführen. Diese Hüpferbewegung kann über den Hubantrieb 10 vorgegeben werden. Ein Hüpferhub bei dieser Hüpferbewegung kann im Bereich zwischen 0,5 mm und 10 mm liegen.
- Der Greifer 7 ist unter der Stichplatte in der Grundplatte 3 gelagert. Eine Greiferachse 9, um die sich der Greifer 7 bei der Stichbildung dreht, verläuft vertikal (vgl. zum Beispiel
Figur 7 ). - Der Greifer 7 dient zur Führung eines bei der Stichbildung mit dem Oberfaden zusammenwirkenden Unterfaden und hat einen Unterfaden-Vorrat in Form einer Spule.
- Zur Erleichterung der Darstellung von Lagebeziehungen wird nachfolgend ein kartesisches xyz-Koordinatensystem verwendet. Die x-Richtung verläuft längs einer Nährichtung der
Figur 2 nach links. Die y-Richtung verläuft horizontal in derFigur 1 nach links und senkrecht zur Zeichenebene derFigur 2 . Die z-Richtung verläuft vertikal in denFiguren 1 und2 nach oben. - Die Nähmaschine 1 hat einen Hubantrieb 10 zum Hubverstellen des Drückerfußes 8 längs der z-Richtung.
Figur 2 zeigt den Drückerfuß 8 in einer auf ein Niveau der Stichplatte abgesenkten Hubstellung.Figur 3 zeigt den Drückerfuß 8 in einer im Vergleich zur Hubstellung nachFigur 2 angehobenem Hubstellung. - Der Hubantrieb 10 weist einen Aktor auf, der als Schrittmotor ausgeführt sein kann. Auf eine Motorwelle des Hubantriebs 10 ist ein in der Zeichnung nicht dargestellter Zahnkranz gesetzt, welcher mit einem Zahnstangenabschnitt einer Drückerfußstange 11 des Drückerfußes 8 zusammenwirkt. Ein mit dem Nähgut zusammenwirkendes Drückerende 12 ist gleichzeitig als Hülse zum Durchtritt der Nähnadel 5 ausgeführt.
- Alternativ zur separaten Ausführung eines Schrittmotor-Hubantriebs 10 kann eine Hubverstellung des Drückerfußes auch von einer Armwelle der Nähmaschine 1 abgeleitet sein.
- Ein Dreh-Antriebsmotor 13, der grundplattenseitig montiert ist, stellt eine gemeinsame Antriebsquelle einerseits für einen Nadelstangen-Drehantrieb 14 zum Drehen der Nadelstange 6 und des Drückerfußes 8 um eine vertikale Nadelstangenachse 15 und andererseits für einen Greifer-Baugruppen-Drehantrieb 16 zum Drehen einer den Greifer 7 beinhaltenden Greifer-Baugruppe 17 um eine Greifer-Baugruppen-Achse 18 dar (vgl. zum Beispiel
Figur 7 ). Die Greifer-Baugruppen-Achse 18 verläuft parallel zur Greiferachse 9 zu dieser beabstandet. Beide Achsen 9, 18 verlaufen parallel zur z-Achse, also vertikal. Die Greifer-Baugruppen-Achse 18 fällt mit der Nadelstangenachse 15 zusammen. - Zum Drehen der Nadelstange 6 und des hiermit drehfest verbundenen Drückerfußes 8 um die Nadelstangenachse 15 steht der Dreh-Antriebsmotor 13 über einem Zahnriemen 19 mit einer Drehantriebswelle 20, die längs der y-Achse verläuft, in Wirkverbindung (vgl.
Figur 8 ). Über einen zunächst längs des Ständers 4 und anschließend längs des Arms 2 geführten weiteren Zahnriemen 21 steht die Drehantriebswelle 20 mit einem nadelstangenseitigen Zahnkranz 22 mit vertikaler Drehachse in Wirkverbindung. Mit dem nadelstangenseitigen Zahnkranz 22 ist einerseits die Nadelstange 6 und anderseits die Drückerfußstange 11 drehfest verbunden. - Im Kopf 2a ist über der Nadelstange 6 eine Fadenhebelbaugruppe 23 angeordnet (vgl.
Figur 1 ). Diese ist so ausgeführt, dass sie unabhängig von einer Drehstellung der Nadelstange 6 um die Nadelstangenachse 15 eine Verknotung des Oberfadens mit dem Unterfaden bei der Stichbildung und einem korrekten Fadenanzug gewährleistet. Benachbart zu einem Fadenhebel 24 der Fadenhebelbaugruppe 23 ist eine Fadenspannungsplatte 25 am Arm 2 der Nähmaschine 1 montiert. Auf der Fadenspannungsplatte 25 sind Spanneinheiten 26 zur Vorgabe einer Fadenspannung des Oberfadens, der in der Zeichnung nicht dargestellt ist, montiert. - Zu einer Nadelstangen-Drehbaugruppe 27, die neben der Nadelstange 6 den hiermit drehfest um die Nadelstangenachse 15 verbunden Drückerfuß 8 aufweist, gehört auch eine Drehscheibe 28, deren zentrale Scheibenachse mit der Nadelstangenachse 15 zusammenfällt (vgl. zum Beispiel
Figur 2 ). - Diese Drehscheibe 28 ist in den
Figuren 2 und3 in einer Seitenansicht dargestellt. Die Drehscheibe 28 ist mit dem Zahnkranz 22 und mit der Nadelstange 6 drehfest verbunden. Die Drehscheibe 28 ist fest mit dem Drückerfuß 8 verbunden. - Der Hubantrieb 10 ist an einem Rahmen der Nähmaschine 1, nämlich an einem kopfseitigen Rahmenelement, fixiert. Die Drehscheibe 28 hat eine in der
Figur 2 angedeutete Umfangsnut 29, in die ein Mitnehmer 30 der Drückerfußstange 11 zur Hubverlagerung des Drückerfußes 8 eingreift. Alternativ kann eine Verbindung des Hubantriebs 10 mit der Drehscheibe 28 über einen Absatz ausgeführt sein. - Zum Drehen der Greifer-Baugruppe 17 um die Greifer-Baugruppen-Achse 18 steht die Drehantriebswelle 20 über einem weiteren Zahnriemen 31 mit einem Zahnkranz eines Hohlwellenabschnitts 32 in Wirkverbindung. Dieser Hohlwellenabschnitt 32 steht über ein Zahnrad-Paar 34,35, eine Getriebewelle 36, ein weiteres Zahnrad-Paar 37, 38 mit einer Stirnverzahnung 39 eines Baugruppen-Gehäuses 40 der Greifer-Baugruppe 17 in Wirkverbindung.
- Der Greifer 7 ist um die Greiferachse 9 im Baugruppen-Gehäuse 40 drehbar. Das Baugruppen-Gehäuse 40 wiederum ist um die Greifer-Baugruppen-Achse 18 drehbar.
- Über die Getriebe-Verbindung 32 bis 39 wird eine Rotation des Hohlwellenabschnitts 32 um eine zur y-Achse parallele Achse in eine Rotation des Baugruppen-Gehäuses 40 um die zur z-Achse parallele Greifer-Baugruppen-Achse 18 umgelenkt.
- Eine Auf- und Abbewegung der Nadelstange 6 parallel zur z-Achse sowie eine Drehung des Greifers 7 um die Greiferachse 9, jeweils zur Stichbildung, wird von einem Näh-Antriebsmotor 41 abgeleitet, der ebenfalls grundplattenseitig montiert ist. Letzterer wirkt über einen Zahnriemen 42 mit einer Kernwelle 43 der Greiferantriebswelle 33 zusammen. Zwischen einem Zahnkranz 42a, an dem der Zahnriemen 42 angreift, und der Kernwelle 43 ist eine Rastkupplung 42b angeordnet, die bei Überlastsituationen die Kernwelle 43 vom Näh-Antriebsmotor 41 trennt.
- Über eine Differenzialgetriebeeinheit 44, eine Übertragungswelle 45 und ein in der
Figur 7 teilweise sichtbares Kegelradgetriebe 46 und eine vertikal verlaufende weitere Übertragungswelle 47 steht die Kernwelle 43 mit einer in derFigur 7 nicht sichtbaren, ebenfalls vertikal verlaufendem Greiferwelle in Wirkverbindung, die mit der Greiferachse 9 fluchtet. - Die Differenzialgetriebeeinheit 44 dient zur Anpassung einer relativen Drehposition einer Greiferspitze um die Greiferachse 9 abhängig von einer jeweiligen Drehposition der Greifer-Baugruppe 17 um die Greifer-Baugruppen-Achse 18. Die ein Differenzialgetriebeeinheit 44 stellt dabei sicher, dass eine Verdrehung der Übertragungswelle 45 zur Kernwelle 43 zur Ermöglichung einer entsprechenden Anpassung der relativen Drehposition der Greiferspitze möglich ist.
- Die Verdrehung der Übertragungswelle 45 zur Kernwelle 43 mittels Differenzialgetriebeeinheit 44 erfolgt zwangsgesteuert. Somit wird je nach Drehposition der Greifer-Baugruppe 17 um die Greifer-Baugruppen-Achse 18 die relative Drehposition der Greiferspitze um die Greiferachse 9 angepasst.
- Der Nähantrieb der Nadelstange wird über den Antriebsmotor 41 auf die Nadelstange über eine Armwelle 48 und ein Kurbel-Umlenkgetriebe, das im Kopf 2a untergebracht ist, gewährleistet
-
Figur 4 zeigt die Nadelstange 6 mit dem Drückerfuß 8 und die Greifer-Baugruppe 17 in einer Dreh-Grundstellung "0°", in der ein Nähen längs der x-Achse erfolgt. Eine Greiferspitze des Greifers 7 ist dabei zur Nadelstangenachse 15 hin ausgerichtet. -
Figur 5 zeigt eine im Vergleich zur Drehstellung nachFigur 4 um 90° entgegen den Uhrzeigersinn verdrehte Drehstellung, die über den Dreh-Antriebsmotor 13 einerseits wirkend auf den Nadelstangen-Drehantrieb 14 und andererseits wirkend auf den Greifer-Baugruppen-Drehantrieb 16 herbeigeführt wurde. Sowohl die Nadelstangen-Drehbaugruppe 27 mit der Nadelstange 6 und dem Drückerfuß 8 als auch die Greifer-Baugruppe 17 sind synchron zueinander einerseits um die Nadelstangenachse 15 und andererseits um die Greifer-Baugruppen-Achse 18 um 90° entgegen den Uhrzeigersinn gedreht. Aufgrund der Wirkung der Differenzialgetriebeeinheit 44 ist auch in dieser Drehstellung "90°" gewährleistet, dass die Greiferspitze zur korrekten Stichbildung der Nadelstangenachse 15 zugewandt ist. - Mit der Nähmaschine 1 kann ein Zweifaden-Steppstich genäht werden.
- Die Komponenten der Nähmaschine 1 stehen mit einer zentralen Steuereinrichtung in Signalverbindung. Hierbei kann es sich um eine CNC-Steuerung handeln.
Claims (10)
- Nähmaschine (1)- mit einer Nadelstange (6) zur Halterung einer Nähnadel (5) zur Führung eines Oberfadens,- mit einer Stichplatte mit einer Öffnung zum Durchtritt der Nähnadel (5) während einer Stichbildung,- mit einem Drückerfuß (8) zum Fixieren von Nähgut während der Stichbildung im Bereich der Stichplatte- mit einem Nadelstangen-Drehantrieb (14) zum Drehen der Nadelstange (6) um eine längs der Nadelstange verlaufende Nadelstangenachse (15).
- Nähmaschine im Anspruch 1, dadurch gekennzeichnet, dass der Drückerfuß (8) drehfest so an der Nadelstange (6) montiert ist, dass der Drückerfuß (8) sich beim Drehen der Nadelstange (6) um die Nadelstangenachse (15) mit der Nadelstange (6) dreht.
- Nähmaschine nach Anspruch 1 oder 2, gekennzeichnet durch einen Hubantrieb (10) zum Hubverstellen der Nadelstange (6) und/oder des Drückerfußes (8).
- Nähmaschine nach Anspruch 3, dadurch gekennzeichnet, dass der Hubantrieb (10) als motorischer Aktor ausgeführt ist.
- Nähmaschine nach Anspruch 3 oder 4, dadurch gekennzeichnet, dass eine über den Nadelstangen-Drehantrieb (14) drehbare Nadelstangen-Drehbaugruppe (27) mit der Nadelstange (6) und dem Drückerfuß (8) eine Drehscheibe (28) aufweist, deren zentrale Scheibenachse mit der Nadelstangenachse (15) zusammenfällt, wobei der Hubantrieb (10) am einem Rahmen der Nähmaschine (1) fixiert ist und über eine Verbindung mit der Nadelstangen-Drehbaugruppe (27) zur Hubverlagerung zusammenwirkt.
- Nähmaschine (1)- mit einer Nadelstange (6) zur Halterung einer Nähnadel (5) zur Führung eines Oberfadens,- mit einer Stichplatte mit einer Öffnung zum Durchtritt der Nähnadel (5) während einer Stichbildung- mit einem Nadelstangen-Drehantrieb (14) zum Drehen der Nadelstange (6) um eine längs der Nadelstange (6) verlaufende Nadelstangenachse (15),- mit einer Greifer-Baugruppe (17) mit einem Greifer (7) zur mit der Nähnadel (5) zusammenwirkenden Stichbildung und zur Führung eines Unterfadens,- mit einem Greifer-Nähantrieb zum Drehen des Greifers (7) um eine Greiferachse (9),- mit einem Greifer-Baugruppen-Drehantrieb (16) zum Drehen der Greifer-Baugruppe (17) um eine Greifer-Baugruppen-Achse (18), die nicht mit der Greiferachse (9) zusammenfällt.
- Nähmaschine nach Anspruch 6, dadurch gekennzeichnet, dass die Greiferachse (9) parallel beabstandet zur Greifer-Baugruppen-Achse (18) verläuft.
- Nähmaschine nach Anspruch 6 oder 7, dadurch gekennzeichnet, dass ein Umlenkgetriebe (42-47) zur Ableitung des Greifer-Nähantriebs von einem Nähantriebsmotor (41) eine Differenzialgetriebeeinheit (44) aufweist.
- Nähmaschine nach einen der Ansprüche 6 bis 8, dadurch gekennzeichnet, dass der Nadelstangen-Drehantrieb (14) und der Greifer-Baugruppen-Drehantrieb (16) von ein und demselben Dreh-Antriebsmotor (13) abgeleitet werden.
- Nähmaschine nach Anspruch 9, dadurch gekennzeichnet, dass ein Umlenkgetriebe zur Ableitung des Nadelstangen-Drehantriebs (14) und des Greifer-Baugruppen-Drehantriebs (16) von dem Dreh-Antriebsmotor (13) mindestens eine Zahnriemen-Umlenkeinheit (19, 21, 31) aufweist.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102022203472.4A DE102022203472A1 (de) | 2022-04-07 | 2022-04-07 | Nähmaschine |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP4257739A1 true EP4257739A1 (de) | 2023-10-11 |
Family
ID=85980596
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP23166891.4A Pending EP4257739A1 (de) | 2022-04-07 | 2023-04-06 | Nähmaschine |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP4257739A1 (de) |
| JP (1) | JP2023155186A (de) |
| KR (1) | KR20230144465A (de) |
| CN (1) | CN116892088A (de) |
| DE (1) | DE102022203472A1 (de) |
| TW (1) | TW202348864A (de) |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19951127C2 (de) | 1999-10-23 | 2002-06-20 | Duerkopp Adler Ag | Knopfloch-Nähmaschine |
| DE10238708A1 (de) | 2002-08-23 | 2004-03-04 | Dürkopp Adler AG | Knopfloch-Nähmaschine |
| EP2028311A2 (de) | 2007-08-22 | 2009-02-25 | Dürkopp Adler Aktiengesellschaft | Nähmaschine sowie Verfahren zum Nähen eines Nahtanfangs mit einer derartigen Nähmaschine |
| EP2476789A2 (de) | 2011-01-04 | 2012-07-18 | JUKI Corporation | Nähmaschine |
| EP2565313A1 (de) | 2011-08-31 | 2013-03-06 | JUKI Corporation | Doppelnadel-Nähmaschine |
| DE102015101412A1 (de) | 2014-02-03 | 2015-08-06 | Juki Corporation | Nähmaschine |
| DE102015220332A1 (de) * | 2015-10-19 | 2017-04-20 | Pfaff Industriesysteme Und Maschinen Gmbh | Nähanlage |
| EP3392388A1 (de) | 2017-04-18 | 2018-10-24 | Dürkopp Adler AG | Nähmaschine |
| EP3875654A1 (de) * | 2020-03-04 | 2021-09-08 | Chee Siang Industrial Co., Ltd. | Nähmaschine mit verstellbarem doppelnadelabstand |
-
2022
- 2022-04-07 DE DE102022203472.4A patent/DE102022203472A1/de active Pending
-
2023
- 2023-03-13 KR KR1020230032596A patent/KR20230144465A/ko unknown
- 2023-03-30 JP JP2023055040A patent/JP2023155186A/ja active Pending
- 2023-03-30 CN CN202310332258.0A patent/CN116892088A/zh active Pending
- 2023-03-31 TW TW112112578A patent/TW202348864A/zh unknown
- 2023-04-06 EP EP23166891.4A patent/EP4257739A1/de active Pending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19951127C2 (de) | 1999-10-23 | 2002-06-20 | Duerkopp Adler Ag | Knopfloch-Nähmaschine |
| DE10238708A1 (de) | 2002-08-23 | 2004-03-04 | Dürkopp Adler AG | Knopfloch-Nähmaschine |
| EP2028311A2 (de) | 2007-08-22 | 2009-02-25 | Dürkopp Adler Aktiengesellschaft | Nähmaschine sowie Verfahren zum Nähen eines Nahtanfangs mit einer derartigen Nähmaschine |
| EP2476789A2 (de) | 2011-01-04 | 2012-07-18 | JUKI Corporation | Nähmaschine |
| EP2565313A1 (de) | 2011-08-31 | 2013-03-06 | JUKI Corporation | Doppelnadel-Nähmaschine |
| DE102015101412A1 (de) | 2014-02-03 | 2015-08-06 | Juki Corporation | Nähmaschine |
| DE102015220332A1 (de) * | 2015-10-19 | 2017-04-20 | Pfaff Industriesysteme Und Maschinen Gmbh | Nähanlage |
| EP3392388A1 (de) | 2017-04-18 | 2018-10-24 | Dürkopp Adler AG | Nähmaschine |
| EP3875654A1 (de) * | 2020-03-04 | 2021-09-08 | Chee Siang Industrial Co., Ltd. | Nähmaschine mit verstellbarem doppelnadelabstand |
Also Published As
| Publication number | Publication date |
|---|---|
| TW202348864A (zh) | 2023-12-16 |
| CN116892088A (zh) | 2023-10-17 |
| JP2023155186A (ja) | 2023-10-20 |
| DE102022203472A1 (de) | 2023-10-12 |
| KR20230144465A (ko) | 2023-10-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2028311B1 (de) | Nähmaschine sowie Verfahren zum Nähen eines Nahtanfangs mit einer derartigen Nähmaschine | |
| DE102009004217A1 (de) | Zwei-Nadel-Nähmaschine | |
| DE10136543C1 (de) | Nähmaschine, insbesondere Knopfloch-Nähmaschine, mit einer Nadelfaden-Klemm- und -Schneid-Einrichtung | |
| EP1582615A2 (de) | Nähmaschine | |
| DE3000831C2 (de) | Nähautomat zur Erzeugung einer eine Befestigungsnaht und Verriegelungsstiche aufweisenden Naht | |
| EP4107321B1 (de) | Nähmaschine | |
| WO2023242171A1 (de) | Nähanlage | |
| EP4257739A1 (de) | Nähmaschine | |
| EP3088589B1 (de) | Nähanlage sowie betriebsverfahren hierfür | |
| DE3819975C2 (de) | Nähautomat | |
| WO2021122086A1 (de) | Stichbildungswerkzeug-baugruppe für eine nähanlage sowie nähanlage mit einer derartigen baugruppe | |
| DE102008010353B4 (de) | Einfassmaschine | |
| EP3399088B1 (de) | Baugruppe und nähmaschine zum erzeugen eines naht-anfangsoberfadens mit einem soll-nahtüberstand | |
| EP2733245B1 (de) | Nähmaschine | |
| EP3088590A1 (de) | Nähmaschine | |
| DE102009004216B3 (de) | Zwei-Nadel-Nähmaschine | |
| DE69120238T2 (de) | Industrie-Nähmaschine, die gleichzeitig verschiedene Nähte ausführen kann | |
| EP3399089B1 (de) | Verfahren und nähmaschine zum erzeugen eines naht-endunterfadens mit vorgegebenem soll-nahtüberstand | |
| DE102005038753B4 (de) | Prüfverfahren für eine Nähmaschine sowie Nähmaschine zur Durchführung eines derartigen Prüfverfahrens | |
| EP2550387B1 (de) | Ein- oder mehrkopfstickmaschine mit einem doppelsteppstich-umlauf-greifer | |
| EP3354784A1 (de) | Verfahren zur erzeugung eines naht-anfangsoberfadens einer in nähgut auszubildenden naht mit einem definierten soll-nahtüberstand sowie nähmaschine zur durchführung eines derartigen verfahrens | |
| EP2503041B1 (de) | Augenknopfloch-Nähmaschine sowie Verfahren zum Nähen einer einen Gimpenfaden aufweisenden Augenknopfloch-Naht | |
| DE19548559C1 (de) | Nähautomat | |
| DE102009004220A1 (de) | Fadenschneidvorrichtung | |
| DE3106386A1 (de) | Fadenschneidanordnung fuer eine naehmaschine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20240220 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |