EP4201283B1 - Bodenreinigungsmaschine mit mindestens einem abstützelement - Google Patents
Bodenreinigungsmaschine mit mindestens einem abstützelement Download PDFInfo
- Publication number
- EP4201283B1 EP4201283B1 EP22212796.1A EP22212796A EP4201283B1 EP 4201283 B1 EP4201283 B1 EP 4201283B1 EP 22212796 A EP22212796 A EP 22212796A EP 4201283 B1 EP4201283 B1 EP 4201283B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- cleaning
- cleaning head
- roller unit
- floor
- dirty fluid
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


















Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/28—Floor-scrubbing machines, motor-driven
- A47L11/282—Floor-scrubbing machines, motor-driven having rotary tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L5/00—Structural features of suction cleaners
- A47L5/12—Structural features of suction cleaners with power-driven air-pumps or air-compressors, e.g. driven by motor vehicle engine vacuum
- A47L5/22—Structural features of suction cleaners with power-driven air-pumps or air-compressors, e.g. driven by motor vehicle engine vacuum with rotary fans
- A47L5/28—Suction cleaners with handles and nozzles fixed on the casings, e.g. wheeled suction cleaners with steering handle
- A47L5/30—Suction cleaners with handles and nozzles fixed on the casings, e.g. wheeled suction cleaners with steering handle with driven dust-loosening tools, e.g. rotating brushes
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4013—Contaminants collecting devices, i.e. hoppers, tanks or the like
- A47L11/4016—Contaminants collecting devices, i.e. hoppers, tanks or the like specially adapted for collecting fluids
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
- A47L11/4041—Roll shaped surface treating tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/02—Nozzles
- A47L9/04—Nozzles with driven brushes or agitators
- A47L9/0461—Dust-loosening tools, e.g. agitators, brushes
- A47L9/0466—Rotating tools
- A47L9/0477—Rolls
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
Definitions
- the invention relates to a floor cleaning machine, comprising a cleaning head, a holding rod device which is connected to the cleaning head, at least one cleaning roller unit which is arranged on the cleaning head, a dirty fluid tank device which is detachably arranged on a base of the cleaning head, and at least one support element which is arranged on the base of the cleaning head and which is spaced from the at least one cleaning roller unit, wherein during a cleaning operation the cleaning head is supported on a floor to be cleaned via the at least one cleaning roller unit and the at least one support element.
- the WO 2021/013343 A1 discloses a floor cleaning machine with a floor head, wherein in a parking position of the floor cleaning machine the floor head is supported on a base by a stand device such that a cleaning roller is spaced from the base, wherein a tank device has at least one continuous recess through which a stand of the stand device is immersed at least in the parking position.
- the US 6,968,593 B1 discloses a handheld liquid extraction cleaner for cleaning a surface.
- the US 5,657,504 discloses a cleaning mop for cleaning floors and removing dust particles from the floor.
- the US 2010/0251505 A1 and the US 2017/0127901 A1 reveal more floor cleaning machines.
- the DE 20 2015 101 302 U1 reveals a cleaning device in the form of a vacuum cleaner.
- a floor cleaner which comprises a handle, a main body, a roller mechanism with a roller with a cleaning belt, a scraper and a dirt fluid receptacle.
- a surface cleaning machine with a cleaning roller and a drive unit for driving the cleaning roller is known.
- a dirt tray is provided into which the cleaning roller sweeps dirt as it rotates. The dirt tray can be opened.
- a floor scrubbing device which is manually operated and comprises a drive roller which is coupled to a scrubbing roller.
- From the DE 10 2007 054 500 A1 is a household floor cleaning device with a wiping roller.
- a cleaning machine station for a cleaning machine is known, wherein the cleaning machine station has a receiving chamber for a cleaning head of the cleaning machine.
- the CN 107007215 A reveals a floor cleaning robot.
- the DE 20 2018 104 772 U1 discloses a dirty water collecting mechanism and dirty water detecting mechanism and a cleaning device.
- Cleaning machines are also available from AU 2017101723 A4 , the CN 206687671 U , the DE 20 2016 105 300 U1 , the US 9,622,637 B1 , the CN 205359367 U , the US 2017/0119225 A1 , the CN 205181250 U , the CN 205181251 U , the CN 205181256 U , the DE 20 2016 105 299 U , the WO 2017/059602 A1 , the WO 2017/059600 A1 , the WO 2017/059601 A1 , the WO 2017/059603 A1 or the DE 20 2016 105 301 U1 known.
- the invention is based on the object of providing a floor cleaning machine of the type mentioned above, which has optimized cleaning results.
- the dirty fluid tank device has a continuous recess assigned to the at least one support element, through which the at least one support element is passed when the dirty fluid tank device is seated on the cleaning head.
- the weight of the cleaning head with the support rod device is supported on the ground by the at least one cleaning roller unit and the at least one support element. This makes it easy to hold the dirty fluid tank device on the base and, in particular, keep it floating.
- the dirty fluid tank device Due to the continuous recess on the dirty fluid tank device, which is assigned to the at least one support element, the dirty fluid tank device can be provided with a large receiving volume despite the presence of the at least one support element.
- the removal direction transverse to the installation surface means that the dirty fluid tank device can be easily removed from the base or inserted into the base.
- the dirty fluid tank device can be easily locked to the base or released.
- the dirty fluid tank device can be held on the base in a movable and, in particular, floating manner in a structurally simple manner. In particular, hanging storage is provided.
- the at least one support element comprises a roller or a slider. This allows an operator to easily guide the cleaning head over the floor to be cleaned using the support rod device.
- the at least one support element comprises a post which is connected to the base and projects away from the base into a space in which the dirty fluid tank device is positioned.
- the post can be used to bridge the space between the base and the installation surface.
- the continuous recess is open on an upper side of the dirty fluid tank device and on an underside of the dirty fluid tank device, whereby when the dirty fluid tank device is fixed to the base, the upper side faces the base and the underside faces away from the upper side. This makes it easy to fix the dirty fluid tank device to the base and to release it from the base.
- At least one support element can be provided that is fixed to the cleaning head (fixed to the base) to define the installation surface.
- the continuous recess is delimited by a wall of the dirty fluid tank device between the top and the bottom, whereby the wall is closed or the continuous recess is open to one side of the dirty fluid tank device.
- the dirty fluid tank device is designed to be fluid-tight with respect to the continuous recess. This results in a minimized "volume loss" of the dirty fluid tank device due to the continuous recess.
- the wall is oriented transversely and in particular perpendicularly to the top and/or bottom of the dirty fluid tank device. This reduces the structural effort for the arrangement of the at least one support element and the continuous recess is minimized.
- the at least one cleaning roller unit is seated on a roller holder of a shaft with a first shaft part, a middle part and a second shaft part, wherein the middle part lies between the first shaft part and the second shaft part and a first roller part of the at least one cleaning roller unit is arranged on the first shaft part and a second roller part of the at least one cleaning roller unit is arranged on the second shaft part, and that a central drive is provided which acts on the middle part.
- the at least one support element is arranged in alignment with the central part in relation to a longitudinal axis of the cleaning head.
- the support element is then guided along the strip that has not been cleaned.
- the at least one support element is not guided into an area that has already been cleaned.
- a step tab is arranged on the dirty fluid tank device and, when the dirty fluid tank device is fixed to the cleaning head, the at least one support element is arranged in alignment with the step tab in relation to a longitudinal axis of the cleaning head.
- the step tab allows the dirty fluid tank device to be easily released from the base by applying appropriate force, in particular via the foot of an operator.
- the alignment with the at least one support element prevents tipping moments and the like.
- Tilting moments or the like are avoided if the at least one support element is arranged centrally between a first lateral side and a second lateral side of the cleaning head.
- This solution makes it possible to create a floor cleaning machine in which the holding rod device is supported by its weight on the at least one cleaning roller unit. This achieves a large, in particular maximum, contact pressure due to the weight of the holding rod device for the cleaning head on a floor to be cleaned.
- the appropriate design of the swivel joint makes it easy to ensure that the cleaning head, on which a dirt fluid tank device is detachably arranged, is in the same position in relation to the floor to be cleaned in every position of the swivel joint. This also improves the cleaning result.
- the swivel joint is designed as an orbital joint with an orbital path guide of the holding rod device on the cleaning head. This makes it easy to achieve coaxiality between the swivel axis of the swivel joint and the axis of rotation. In particular, this makes it possible to ensure that when the holding rod device is swiveled towards the cleaning head, if the cleaning head with the at least one cleaning roller unit is properly aligned with the is placed on the floor to be cleaned, the cleaning roller unit rotates on the floor due to the pivoting.
- the swivel joint has a track guide device which is fixedly mounted on the cleaning head and which has a circular track section with a center which lies on the swivel axis, and the swivel joint has a counter device which is fixedly mounted on the holding rod device and which is supported on the track guide device.
- a track guide device which is fixedly mounted on the cleaning head and which has a circular track section with a center which lies on the swivel axis
- the swivel joint has a counter device which is fixedly mounted on the holding rod device and which is supported on the track guide device.
- the circular path section surrounds the at least one cleaning roller unit from two sides. This makes it easy to create a swivel joint and in particular an orbital joint whose swivel axis coincides with the rotation axis of the at least one cleaning roller unit.
- the counter device is supported by at least three support points on the track guide device. This results in a mechanically stable swivel joint construction.
- the swivel joint is arranged centrally between a first lateral side and a spaced-apart second lateral side of the cleaning head. This results in a symmetrical design and tilting moments and the like are avoided.
- the at least one cleaning roller unit moves along with the pivoting of the holding rod device about the pivot axis. It then rolls on a floor to be cleaned when the cleaning head is properly supported on the floor to be cleaned via the at least one cleaning roller unit. This movement is superimposed on the rotational movement of the at least one cleaning roller unit about the rotation axis.
- the cleaning head is assigned a step tab in the area of a rear end of the cleaning head, wherein the rear end faces away from a front end and the at least one cleaning roller unit is arranged in the area of the front end.
- An operator can use the step tab to access the cleaning head and in particular the dirty fluid tank device using his foot. This results in an improved option for detaching the dirty fluid tank device from the cleaning head. An operator then does not have to touch the dirty fluid tank device himself, for example, in order to remove it from the cleaning head or to connect the cleaning head to the dirty fluid tank device.
- the tread plate is arranged in alignment with the pivot joint relative to a longitudinal axis of the cleaning head and is in particular centrally between a first lateral side and a second lateral side of the cleaning head. This prevents, for example, tipping moments.
- an operator By projecting over the rear end, an operator can easily act on the treadle using one foot from his operator side. He can then simultaneously stand on the treadle and act on the holding rod device, for example.
- the dirty fluid tank device can be easily released by exerting force on it. For example, if the operator applies force to the footplate when the cleaning head with the dirty fluid tank device is resting on a floor, the dirty fluid tank device can be fixed to the floor, and the dirty fluid tank device can be released from the cleaning head by lifting the cleaning head.
- Raised lateral edge walls on the tread prevent the operator's foot from slipping. Sharp edges or the like can also be avoided.
- a free space is formed on the cleaning head in which the holding rod device is movable when pivoting about the pivot axis, and in particular a step tab is provided on the Free space or arranged in continuation of the free space.
- a drive motor is provided for the cleaning roller unit, which is connected to the holding rod device in a rotationally fixed manner with respect to the pivotability of the holding rod device about the pivot axis.
- the drive motor is pivoted as well. This makes it possible to create a drive train with the drive motor and the cleaning roller unit (on a roller holder) in which no sliding coupling or the like needs to be provided.
- a gear device for transmitting a torque from a drive motor to the at least one cleaning roller unit, in which the gear device is connected to the holding rod device in a rotationally fixed manner with respect to a pivotability of the holding rod device about the pivot axis. This allows the entire drive train consisting of the drive motor and gear device to be pivoted relative to the cleaning head by pivoting the holding rod device on the cleaning head and no additional coupling is necessary.
- a roller holder is provided on which the at least one cleaning roller unit is located, whereby the roller holder is connected to the holding rod device in a rotationally fixed manner with respect to the pivotability of the holding rod device.
- the entire drive train consisting of the drive device, gear device and drive motor is connected to the holding rod device in a rotationally fixed manner and can be pivoted with it. This results in a direct effect of the weight of the holding rod device including the drive motor and gear device. on the cleaning roller unit to provide a high and in particular maximum contact pressure of the cleaning roller unit on a floor to be cleaned.
- the at least one cleaning roller unit is seated on a roller holder on a shaft with a first shaft part, a middle part and a second shaft part, wherein the middle part is located between the first shaft part and the second shaft part and a first roller part of the at least one cleaning roller unit is arranged on the first shaft part and a second roller part of the at least one cleaning roller unit is arranged on the second shaft part, and a central drive is provided which acts on the middle part, and the middle part is arranged in alignment with the pivot joint with respect to a longitudinal axis of the cleaning head.
- This central drive allows the first roller part and the second roller part to be guided to the lateral side ends of the cleaning head. This makes it possible to achieve cleaning close to the edge. Tilting moments and the like can be avoided by arranging the pivot joint in alignment with the middle part.
- the holding rod device has a first part and a second part, wherein the first part is hinged to the cleaning head and the second part is rotatable about an axis of rotation relative to the first part, wherein in particular the axis of rotation is oriented transversely and preferably perpendicular to the pivot axis of the pivot joint.
- the additional rotatability makes it easier for an operator, for example, to carry out a cleaning process in corners or the like. He can position the cleaning head in different ways relative to himself due to the rotatability about the axis of rotation.
- the axis of rotation is, for example, parallel to a longitudinal axis of the first part or, for example, parallel to a longitudinal axis of the second part.
- the lockable parking position is a rest position for the floor cleaning machine, in particular when not in use. Rotation is possible outside of this rest position in order to achieve extensive cleaning options.
- the locking device can be implemented in a simple manner using the movable slide.
- the spring support makes it easy to automatically reach the locking position for a parking position.
- the spring support is such that outside the parking position the slide is held in such a position that there is no positive connection with the second part.
- the slide is moved against the force of the spring device in such a way that the positive connection is achieved, in particular by appropriately supporting the slide on the cleaning head.
- the slider has a nose, wherein the nose then enables the cleaning head, in particular the parking position, to act in order to push the slider into the positive locking position with the second part of the holding rod device or to hold it there.
- overload protection is provided for the locking device. This reduces or prevents the risk of damage to the floor cleaning machine when subjected to high force, particularly in the parking position.
- An alternative option is provided to reduce the risk of damage.
- the slide is designed in several parts, so that in the parking position, when it is not possible to move the slide as a whole, the parts of the slide can move relative to each other to provide overload protection and reduce the risk of damage.
- the second part By spring-supporting the second part on the first part, it is achieved in particular that, outside of the overload case, the slide as a whole can be moved with the first part and with the second part in order to reach the locking position or to be able to release the locking position.
- the multi-part design allows the slide itself to deflect under high force loads.
- the holding rod device has a first region with a first longitudinal axis and a second region with a second longitudinal axis, wherein the first longitudinal axis and the second longitudinal axis are oriented at an obtuse angle to one another, wherein in particular the obtuse angle is in the range between 120° and 170°.
- a small lower limit means that it can be easily driven under furniture, for example.
- a lockable parking position allows the holding rod device to be positioned in a stable manner relative to the cleaning head and an overall stable position for the floor cleaning machine to be parked or, for example, for cleaning the at least one cleaning roller unit.
- a locking device which locks the holding rod device at the upper limit with the cleaning head in such a way that that the holding rod device cannot be pivoted towards the cleaning head. This allows the holding rod device to be locked to the cleaning head. This results in a storage position for the floor cleaning machine. This also makes it easy to carry out an automated cleaning process of at least one cleaning roller unit or other parts of the floor cleaning machine at a corresponding floor station. The holding rod device is prevented from "falling down”.
- the locking device comprises at least one spring-loaded pin and an associated immersion opening for the pin, wherein (i) the at least one pin is arranged in a rotationally fixed manner on the holding rod device and the associated immersion opening is arranged in a rotationally fixed manner on the cleaning head, or (ii) the at least one pin is arranged in a rotationally fixed manner on the cleaning head and the associated immersion opening is arranged in a rotationally fixed manner on the holding rod device.
- a pin immersion opening A locking device can be implemented in a structurally simple manner. The locking can be easily established and also removed by an operator. In particular, the locking can be achieved automatically by reaching a certain swivel position (in particular the upper limit). Furthermore, the locking position (blocking position) can be easily removed by exerting force on the holding rod device.
- the pin is arranged in a movable manner and is spring loaded.
- the pin By guiding the first inclined plane, the pin can be positioned against the effect of the spring force, which enables it to be immersed in the immersion opening.
- the spring load causes the pin to pressed into the immersion opening as soon as it is reached.
- This locking process can be carried out solely by means of a swivel movement on the holding rod device and can therefore be carried out automatically.
- a corresponding locking position can be reached directly with the pin immersed in the immersion opening by swiveling, in particular to an upper limit of the swivel angle range.
- the first contact surface which is adapted to the first inclined plane, enables easy, automated access to the corresponding locking position.
- the second inclined plane can be used to set the appropriate amount of force required to guide the pin out of the insertion opening again.
- the amount of force can be achieved by exerting a torque on the holding rod device. This allows the locking position to be released automatically. An operator then only has to swivel the holding rod device towards the cleaning head without having to perform any further intervention to release the lock.
- the first inclined plane and the second inclined plane also make it easy to set the amount of force required to reach the locking position (pin immersed in the immersion opening) or to release the locking position (pin emerges from the immersion opening).
- the dimensions are such that the amount of force required to release the locking position is greater than that required to reach the locking position.
- the positioning of the step tab on the dirty fluid tank device makes it easy to detach the dirty fluid tank device from the cleaning head. Furthermore, the risk of the floor cleaning machine tipping over when it is parked is reduced.
- dirty fluid can be easily removed and, in particular, coupled into the dirty fluid tank device without suction.
- the sweeping element this can be achieved in a simple manner, if it is arranged on the dirty fluid tank device and the dirty fluid tank device is movable and in particular floating on the cleaning head.
- the cleaning head has a support surface for a floor to be cleaned, which is in particular a flat surface, and the cleaning head is assigned a horizontal plane parallel to the support surface, and when the floor cleaning machine is operating properly, the horizontal plane of the cleaning head is always in the same position to the support surface regardless of a pivoting position of the holding rod device to the cleaning head.
- the options of dry sweeping, wet wiping and a combination of sweeping and wet wiping can be implemented on one device and adjusted accordingly by an operator. If necessary, an adjustment to the respective operating mode can be made by replacing at least one cleaning roller unit.
- An embodiment of a surface cleaning machine according to the invention is a floor cleaning machine 10.
- the basic structure of the floor cleaning machine 10 and its basic mode of operation is explained with reference to the Figures 1 to 3 explained.
- the floor cleaning machine 10 is particularly suitable for cleaning hard floors.
- the floor cleaning machine 10 comprises a cleaning head 12.
- the cleaning head 12 is a floor head.
- the cleaning head 12 is mounted on a base 14 on a floor 16 to be cleaned.
- the installation surface 14 is in particular a flat surface.
- one cleaning roller unit 18 is arranged on the cleaning head 12. In the embodiment shown, exactly one cleaning roller unit 18 is provided.
- the cleaning roller unit 18 may comprise a single-piece cleaning roller or a multi-piece cleaning roller, as explained in more detail below.
- the cleaning head 12 has a front end 20 and a rear end 22 facing away from the front end.
- a longitudinal axis 24 of the cleaning head 12 extends between the front end 20 and the rear end 22.
- the cleaning head 12 has a first lateral side 26 and an opposite second lateral side 28.
- a spacing direction between the first lateral side 26 and the second lateral side 28 is transverse and in particular perpendicular to the longitudinal axis 24.
- the cleaning roller unit 18 is arranged in the area of the front end 20 of the cleaning head 12. When the floor cleaning machine 10 is operating properly, an operator stands behind the rear end 22 of the cleaning head 12 on the floor 16 to be cleaned.
- the installation surface 14 is connected via the cleaning roller unit 18 and at least one installation element (in the Figures 1 to 3 not shown).
- the cleaning head 12 and thus also the floor cleaning machine 10 are supported on the floor 16 to be cleaned via the cleaning roller unit 18 and the at least one support element.
- the cleaning head 12 has a base 30.
- This base 30 is a basic body of the cleaning head 12.
- a removable dirty fluid tank device 32 is located on the cleaning head 12.
- the dirty fluid tank device 32 receives dirty fluid.
- Dirty fluid is understood here to be a flowable fluid that can be wet or dry.
- the dirty fluid can, for example, include cleaning fluid with dirt particles or just dust particles.
- the dirty fluid tank device 32 can comprise several separate individual parts which can be individually fixed to the base 30 and can be removed therefrom.
- the dirty fluid tank device 32 comprises a unit having one or more separate chambers for dirty fluid.
- a step tab 34 which projects to the rear, is located on the dirty fluid tank device 32. This serves to facilitate the removal of the dirty fluid tank device 32 from the cleaning head 12, as will be explained in more detail below.
- a holding rod device 36 is pivotally connected to the cleaning head 12 via a pivot joint.
- the holding rod device 36 is designed such that a standing operator can hold the floor cleaning machine 10 and guide it over the floor 16 to be cleaned.
- a handle 38 is arranged proximally on the holding rod device 36.
- the handle 38 is designed as a closed bow handle.
- Other designs, such as a non-closed bow handle and the like, are also possible.
- operating elements such as an on/off switch and further operating elements, for example for control, are arranged on the handle 38 or on the holding rod device 36 in the vicinity of the handle 38.
- the holding rod device 36 is articulated to the base 30 via the pivot joint.
- a swivel axis 40 ( Figure 2 ) of the pivot joint of the articulation of the holding rod device 36 to the cleaning head 12 is parallel to the installation surface 14.
- the pivot axis 40 is transverse and in particular perpendicular to the longitudinal axis 24.
- the holding rod device 36 has a (second) longitudinal axis 42, along which the holding rod device 36 extends to the handle 38.
- the pivot axis 40 is transverse and in particular perpendicular to this second longitudinal axis 42 of the holding rod device 36.
- the holding rod device 36 has a further pivoting capability with respect to the mobility to the cleaning head 12, wherein the corresponding axis of rotation 41 is oriented transversely to the pivot axis 40.
- This rotatability is in Figure 1 indicated by the arrow with the reference number 44.
- the corresponding axis of rotation 41 of this rotatability 44 is, for example, parallel or coaxial to a first longitudinal axis 80 of the holding rod device 36 (see below).
- this rotatability 44 is formed by a corresponding design of the holding rod device 36 with a first part 278 and a second part 280 that can be rotated relative to the first part 278. This is explained below in particular with reference to the Figures 15 to 18 explained in more detail.
- the floor cleaning machine 10 comprises a drive motor (in the Figures 1 to 3 not shown), by means of which the cleaning roller unit 18 is driven in rotation about a rotation axis 46.
- the cleaning roller unit 18 has a single rotation axis 46, even if it comprises a multi-part cleaning roller.
- the rotation axis 46 is parallel to the support surface 14. It is oriented perpendicular to the longitudinal axis 24. It is parallel to the pivot axis 40.
- the pivot axis 40 of the pivotability of the holding rod device 36 on the cleaning head 12 and the rotation axis 46 are coaxial with each other.
- the drive motor is arranged on the cleaning head 12, or on the holding rod device 36, or on a transition region between the holding rod device 36 and the cleaning head 12. It acts on the cleaning roller unit 18 and provides a corresponding torque for a rotary drive of the cleaning roller unit.
- the floor cleaning machine 10 can be mains operated or battery operated.
- a battery holder 48 is provided which accommodates one or more batteries and in particular rechargeable batteries.
- the batteries can be arranged permanently on the floor cleaning machine 10 or can be removed from it.
- the battery holder 48 is arranged on the holding rod device 36. In principle, however, an arrangement on the cleaning head 12 is also possible.
- the floor cleaning machine 10 is designed in particular for wet cleaning of hard floors.
- a tank device 50 for cleaning fluid is provided.
- the cleaning fluid is in particular fresh water, optionally with a cleaning agent additive.
- the cleaning roller unit 18 can be directly moistened and/or the floor 16 to be cleaned can be moistened using cleaning fluid from the tank device 50. This makes it easier to remove dirt, and the corresponding dirt fluid is absorbed by the cleaning roller unit 18 and delivered to the dirt fluid tank device 32.
- the tank device 50 is arranged on the holding rod device 36.
- a corresponding supply device for cleaning liquid is provided, which leads from the tank device 50 to the cleaning head 12 in order to be able to moisten the cleaning roller unit 18 and/or the floor 16 to be cleaned with cleaning liquid.
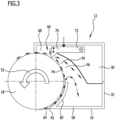
- FIG 3 The basic functional structure of the cleaning head 12 is shown and the basic functionality is explained using Figure 3 During cleaning operation, the cleaning head 12 is placed with its base 14 on the floor 16 to be cleaned (in Figure 3 the at least one further mounting element is not shown). The cleaning roller unit 18 acts on the floor to be cleaned and rotates in a direction of rotation 52.
- the dirty fluid tank device 32 is located on the base 30 of the cleaning head 12.
- a mouth device 54 is arranged on the cleaning head 12, which has a mouth opening 56.
- This mouth opening 56 is in fluid connection with the dirty fluid tank device 32 or is itself a mouth opening on the dirty fluid tank device 32.
- the cleaning roller unit 18 rotates, it is rotated past the mouth opening 56.
- the dirty fluid tank device 32 has a base 58. When the floor cleaning machine 10 is operating properly, this base 58 faces the floor 16 to be cleaned.
- a wall 60 is located on the base 58 facing the cleaning roller unit 18, which leads to the mouth opening 56. The wall 60 is adapted to the cylindrical shape of the corresponding cleaning roller of the cleaning roller unit 18.
- the cleaning head 12 has a sweeping element 62, which serves to feed coarse dirt to the cleaning roller unit 18.
- This coarse dirt is in Figure 3 indicated by double arrows 64.
- the coarse dirt 64 which is provided via the sweeping element 62 of the cleaning roller unit 18, can be taken along by the cleaning roller unit 18 and thrown into the dirty fluid tank device 32 via the mouth opening 56.
- the sweeping element 62 is arranged on the base 30 or, as in Figure 3 shown, arranged on the dirty fluid tank device 32.
- the cleaning roller unit 18 is moistened with cleaning fluid via a supply device 66 for cleaning fluid.
- This moistening is in Figure 3 indicated by the wavy arrows with the reference number 68.
- the humidification is arranged downstream of the mouth opening 56 in relation to the direction of rotation 52.
- At least one stripping element 70 is provided, which is arranged on the base 30 and is positioned between the mouth opening 56 and the humidification region 68.
- the stripping element 70 is in particular movably positioned on the base 30.
- the stripping element 70 is seated on a holder 72 which is pivotally connected to the base 30.
- This holder 72 is spring-loaded (in Figure 3 not shown). The spring action presses the stripping element 70 against the cleaning roller unit 18.
- the cleaning roller unit 18 has a trimming for its cleaning rollers, which is arranged on a corresponding trimming holder.
- the trimming is, for example, a textile material. However, it can also basically be a bristle trimming.
- the stripping element 70 is arranged in such a way that it touches the trimmings and preferably dips into the trimmings.
- the spring loading of the movable holder 72 ensures that it is pressed or pressed in accordingly.
- the stripping element 70 forms a mouth wall of the mouth device 54 for the mouth opening 56.
- the stripping element 70 separates the humidification area 68 from the mouth opening 56.
- the stripping element 70 acts on the cleaning roller unit 18 and on the trimmings in such a way that dirty fluid is detached from the corresponding cleaning roller (and in particular moist dirty fluid is detached) and is conveyed via the mouth opening 56 into the dirty fluid tank device 32.
- This dirty fluid 74 separated by the scraping element 70 can also contain coarse dirt particles which were not transported directly into the dirty fluid tank device 32 via the mouth opening 56.
- the floor cleaning machine 10 with the training according to Figure 3 has a sweeping function, by means of which coarse dirt (and also dry coarse dirt) can be swept from the floor 16 to be cleaned. It has a wiping function, by means of which the floor 16 to be cleaned can be moistened via the moistening 68 and wet dirty fluid can be absorbed and can be detached via the scraping element 70 and transported into the dirty fluid tank device 32.
- the cleaning roller unit 18 is in particular positioned interchangeably on the cleaning head 12. This means that the cleaning roller unit 18 or a cleaning roller can be cleaned easily, for example. This also makes it possible to adapt it to the specific cleaning process. For example, if a cleaning roller of the cleaning roller unit 18 has a textile trim such as a microfiber trim, wet cleaning and sweeping cleaning can be carried out at the same time. However, it is also possible, for example, to use a cleaning roller with bristle trim as the cleaning roller in order to carry out a pure sweeping process. (In particular, moistening of the cleaning roller unit 18 or the floor 16 to be cleaned is switched off during the pure sweeping process.)
- the dirty fluid tank device 32 in particular with the sweeping element 62 fixed thereto, is arranged floating to the base 30 in order, for example, to be able to position the sweeping element 62 in the same position to the cleaning roller unit 18 regardless of a trim length of the cleaning roller unit 18.
- the basic functionality of the floor cleaning machine 10, as shown in the Figure 3 explained is also possible for a cleaning head 12 without a holding rod device 36 and in particular for a self-propelled and self-steering cleaning machine ("cleaning robot").
- cleaning robot a self-propelled and self-steering cleaning machine
- the battery holder 48 and the tank device for cleaning liquid 50 are then arranged in the cleaning head 12 itself.
- dirty fluid is conveyed via the cleaning roller unit 18 into the dirty fluid tank device 32 without the need for a suction unit.
- the dirty fluid tank device 32 can be removed from the cleaning head 12 for emptying.
- dirty fluid located in the dirty fluid tank device 32 it is also possible for dirty fluid located in the dirty fluid tank device 32 to be sucked out.
- a corresponding suction unit device and an associated additional dirty fluid tank are arranged on the holding rod device 36.
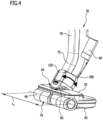
- the holding rod device 36 has a first region 76 and a second region 78.
- the first region 76 is arranged at an angle to the second region 78.
- the first region 76 is a distal region, and the handle 38 and thus also the proximal region are located on the second region 78.
- control panel with several control elements is arranged on the handle 38 or on the second area 78.
- the tank device 50 for cleaning fluid is arranged at the second region 78.
- control panel comprises a switch that can be used to switch whether the cleaning roller unit 18 and/or the floor 16 to be cleaned is moistened using cleaning fluid from the tank device 50 for cleaning fluid 50. This makes it possible to carry out a dry sweeping operation or a wet wiping operation, depending on the operator's choice.
- the first region 76 extends in a first longitudinal axis 80 (see also Figure 1 ), and the second region 78 along the second longitudinal axis 42.
- the first region 76 and the second region 78 lie at an obtuse angle 82 ( Figure 1 ) to each other, which lies between 120° and 170°.
- this obtuse angle 82 is approximately 145°.
- the first region 76 and the second region 78 are continuously connected to one another.
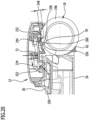
- the holding rod device 36 is articulated to the cleaning head 12 and thereby to the base 30 by means of a pivot joint 84.
- the pivot axis 40 of the pivot joint 84 coincides with the rotation axis 46 of the rotation of the cleaning roller unit 18.
- the swivel joint 84 is designed as an orbital joint. It comprises a path guide device 86, which is seated in a rotationally fixed manner on the cleaning head 12 and thereby on the base 30. This path guide device 86 comprises a circular path section 88. A center of the circular path section 88 lies on the swivel axis 40/rotation axis 46.
- a counter device 90 is connected in a rotationally fixed manner to the first region 76 and is supported on the web guide device 86.
- the counter device 90 is guided in a sliding manner on the circular path section 88 of the path guide device 86; there is an orbital guidance of the counter device 90 on the circular path section 88 of the path guide device 86.
- At least three support points are provided for guiding the counter device 90 on the web guide device 86.
- the circular path section 88 is arranged with a partial area behind the cleaning roller unit 18 in relation to the longitudinal axis 24 of the cleaning head 12. In relation to a height axis 92, which is perpendicular to the longitudinal axis 24 and perpendicular to the installation surface 14, the circular path section 88 is arranged with a partial area above the cleaning roller unit 18.
- the circular path section 88 is, for example, at least approximately designed as a quarter-circle section, which to a certain extent encompasses the cleaning roller unit 18.
- the pivot joint is positioned centrally between the first lateral side 26 and the second lateral side 28 on the base 30. It is arranged in particular symmetrically on the cleaning head 12. It lies on a central plane 94 (see Figure 2 ), which is located centrally between the first lateral side 26 and the second lateral side 28 and is oriented perpendicular to the rotation axis 46 or pivot axis 40.
- the center plane 94 is also oriented perpendicular to the support surface 14.
- a drive motor 98 which is in particular an electric motor, is provided for driving the cleaning roller unit 18 in the rotational movement of the rotation axis 46 with the rotation direction 52. This is connected in a rotationally fixed manner to the holding rod device 36, so that it is pivoted when the holding rod device 36 pivots about the pivot axis 40.
- the drive motor 98 is positioned on the holding rod device 36 and in particular positioned on the first region 76.
- the first region 76 of the holding rod device 36 has a housing 100 which accommodates the drive motor 98.
- a battery holder 48' is arranged on the first region 76 or on a transition between the first region 76 and the second region 78. (In the embodiment shown in the Figures 1 and 2 In the embodiment shown, the battery holder 48 is arranged on the second region 78.)
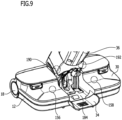
- a free space 102 (compare Figure 5 ) which is centrally located between the first lateral side 26 and the second lateral side 28 and lies on the center plane 94.
- This free space 102 forms a pivoting space in which the holding rod device 36 is movable, wherein in particular the first region 76 is movable in this free space 102.
- the free space 102 is open towards the rear end 22.
- the housing 100 with the drive motor 98 is movable in the free space 102.
- the free space 102 provides a large pivoting angle range for pivoting the holding rod device 36 about the pivot axis 40 relative to the base 30.
- the floor cleaning machine 10 has a transmission device 104 ( Figure 7 ), which serves to transmit a torque from the drive motor 98, which is positioned at a distance from the cleaning roller unit 18, to the cleaning roller unit 18.
- the transmission device 104 also comprises a reduction gear, which is used for Reduction of the rotational speed is used so that a rotational speed of the cleaning roller unit 18 during rotation about the rotation axis 46 is lower than a drive speed of the drive motor 98.
- the transmission device 104 comprises, for example, a belt transmission and the speed reduction gear.
- the cleaning roller unit 18 is or comprises a roller holder 106.
- the roller holder 106 in turn comprises a shaft 108, which is connected in a torque-effective manner to the gear device 104.
- the shaft 108 rotates about the rotation axis 46 when driven accordingly by the drive motor 98.
- the shaft 108 (see Figure 6 ) a first shaft part 110, a second shaft part 112 and a middle part 114, which is connected to the first shaft part 110 and the second shaft part 112.
- the shaft 108 with the first shaft part 110, the second shaft part 112 and the middle part 114 forms a unitary shaft with a single axis of rotation, namely the axis of rotation 46.
- the middle part 114 is located centrally between the first lateral side 26 and the second lateral side 28 and is located on the middle plane 94.
- the first shaft portion 110 receives a first roller portion 116 and the second shaft portion 112 receives a second roller portion 118 of the cleaning roller unit 18.
- the first roller portion 116 and the second roller portion 118 are separate units, but rotate about the same rotational axis 46 when seated on the shaft 108.
- the first roller part 116 which is seated on the first shaft part 110, extends to the first lateral side 26 or almost to it.
- the second roller part 118 which is seated on the second shaft part 112, extends to the second lateral side 28 or almost to it.
- the middle part 114 of the shaft 108 is free of rollers.
- the gear device 104 is coupled to it in a torque-effective manner. There is a central drive of the cleaning roller unit 18.
- the first roller part 116 and the second roller part 118 are each placed from the outside onto the associated shaft part 110 or 112 and locked accordingly with the associated shaft part 110 or 112 in order to obtain a rotationally fixed connection.
- the central part 114 of the shaft 108 and thus the roller holder 106 and the swivel joint 84 are aligned. They lie on the central plane 94 and are in particular each mirror-symmetrical to the central plane 94.
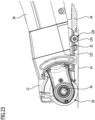
- the cleaning head 12 has, as mentioned above, (at least) one support element 120.
- exactly one support element 120 is provided ( Figure 7 , Figure 19(d) , Figure 23 , 24 ).
- the support element 120 is spaced apart from the cleaning roller unit 18 and defines the installation surface 14 with the latter.
- the support element 120 is located on the base 30. Even if the dirty fluid tank device 32 is removed, the cleaning head 12 with the cleaning roller unit 18 and the support element 120 can be set up on a floor 16.
- the support element 120 comprises a post 122 on which a roller or a slider 124 is located.
- the roller or the slider 124 serves to provide support on the floor 16 to be cleaned.
- the roller or the slider 124 for example a skid being provided, is guided over the floor 16 to be cleaned when the floor cleaning machine 10 is guided.
- the base 30 has a bottom side 126 facing the dirty fluid tank device 32.
- the post 122 projects transversely and in particular vertically from this bottom side 126 in the direction of the installation surface 14.
- the support element 120 is aligned with the central part 114 of the shaft 108 with respect to the longitudinal axis 24.
- the support element 120 is located on the center plane 94.
- a plurality of support elements are provided, they are arranged in particular in a row which lies on the center plane 94.
- roller area on the middle part 114 of the shaft 108 there is no roller area on the middle part 114 of the shaft 108, and during cleaning a central strip on the middle part 114 on the floor 16 to be cleaned remains unaffected. (Cleaning is carried out here by offset travel.) Due to the aligned arrangement of the support element 120 for this purpose, the support element 120 is displaced on a non-affected area of the floor 16.
- the dirty fluid tank device 32 is adapted to the base 30 in terms of its shape and dimensions.
- the dirty fluid tank device has the bottom 58 with the wall 16 and the mouth opening 56.
- the dirty fluid tank device 32 has a bottom 127 and a top 128.
- the top 128 of the dirty fluid tank device 32 faces the bottom 126 of the base 30.
- the bottom 127 of the dirty fluid tank device 32 lies on the bottom 58 and faces away from the top 128.
- the wall 60 and a further wall 130 which closes off the dirty fluid tank device 32 with an interior space for receiving dirty fluid.
- the wall 60 of the dirty fluid tank device 32, on which the mouth opening 56 is located, has a cutout 132 (see Figure 6 ) which is adapted to the central portion 114 of the shaft 108.
- the mouth opening 56 of the mouth device 54 comprises in particular a first opening part 134 and a second opening part 136.
- the first opening part 134 is associated with the first roller part 116 and the second opening part 136 is associated with the second roller part 118.
- the dirty fluid tank device 32 has a first chamber 138 and a second chamber 140.
- the first opening part 134 is formed on the first chamber 138 and the second opening part 136 is formed on the second chamber 140. Dirty fluid is coupled directly into the first chamber 138 via the first opening part 134 and dirty fluid is coupled directly into the second chamber 140 via the second opening part 136.
- the two chambers 138 and 140 can be separated from each other in a fluid-tight manner or can be fluidically connected to each other so that dirty fluid can be evenly distributed in the dirty fluid tank device 32.
- the dirty fluid tank device 32 has a lid 142 which at least partially forms the upper side 128. This lid 142 is spaced from the bottom 58.
- the cover 142 is removable when the dirty fluid tank device 32 is removed from the cleaning head 12 in order to be able to empty the dirty fluid tank device 32.
- the step tab 34 is arranged on the wall 130 of the dirty fluid tank device 32. It is arranged such that it is spaced from the installation surface 14 when the dirty fluid tank device 32 is fixed to the base 30.
- the step tab 34 is arranged in alignment with the free space 102. It is a continuation of the free space 102 away from the rear end 22. It is arranged in such a way that it does not obstruct the corresponding pivoting space of the holding rod device 36 in the free space 102.
- the tread plate 34 is located on the center plane 94 and is arranged and designed in particular mirror-symmetrical to this.
- the tread plate 34 comprises a plate 144 which has raised edge walls 146 (see Figure 5 ).
- the edge walls 146 are rounded.
- the tread plate 34 has a width (in a direction parallel to the pivot axis 40 or rotation axis 46) which is at least as wide as typical dimensions of a foot with shoes.
- An operator can place his foot on the footplate 34 and then, by exerting appropriate force, lift the cleaning head 12 to release the dirty fluid tank assembly 32 from the base 30. This is described in more detail below.
- the raised, rounded edge walls 146 of the tread plate 134 prevent an operator's foot from slipping sideways. Sharp edges are avoided on the plate 144.
- spaced apart webs or grooves are arranged on the plate 144 to prevent an operator's foot from slipping.
- the tread plate 34 is arranged in alignment in continuation of the free space 102. It is aligned with respect to the longitudinal axis 24 of the cleaning head 12 in alignment with the pivot joint 84 and also in alignment with the central part 114 of the shaft 108.
- the dirty fluid tank device 32 has a removal direction 148 ( Figure 6 ) away from the base 30.
- the removal direction 148 leads from the underside 126 of the base 30 away in the direction of the installation surface 14.
- the dirty fluid tank device 32 can be removed from the cleaning head 12 in such a way that it can be released and thus removed, for example by lifting the cleaning head 12 and pressing the dirty fluid tank device 32 (for example on the step tab 34) in the direction of the removal direction 148, or by pulling the dirty fluid tank device 32 away from the base 30 in the removal direction 148.
- a space 150 is formed, delimited by the underside 126 of the base 30, in which the dirty fluid tank device 32 is positioned when it is fixed to the base 30.
- the support element 120 is also located in this space.
- This continuous recess 152 is open at the top 128 and at the bottom 127.
- the continuous recess 152 is closed at the side so that it is fluid-tight.
- the support element 120 When the dirty fluid tank device 32 is seated on the base 30, the support element 120 is immersed through the continuous recess 152 so that the cleaning head 12 can be supported on the floor 16 to be cleaned via the support element 120.
- the continuous recess 152 is dimensioned such that the support element 120 can penetrate through and can also emerge when the dirty fluid tank device 32 is removed from the base 30. In the embodiment shown, the continuous recess 152 is closed on all sides.
- the continuous recess 152 it is also possible for the continuous recess 152 to be open towards the rear end 22.
- the continuous recess 152 has the shape of a (hollow) cylinder.
- the through-hole 152 is arranged in alignment with the central portion 114 of the shaft 108, the pivot joint 84 and the tread plate 34, corresponding to the aligned orientation of the support element 120 with respect to the longitudinal axis 24.
- the dirty fluid tank device 32 is suspended from the base 30.
- a plurality of holders 154 are provided, which are seated on the base 30 and protrude from its underside 126 in the direction of the mounting surface 14.
- a first holder and a second spaced-apart holder are provided. These are designed as described below and in particular are designed identically.
- the first holder and the second holder are arranged mirror-symmetrically to the center plane 94 and the free space 102 lies between them.
- a first location 156 is indicated at which the first holder is located, and a second location 158 is indicated at which the second holder is located. These are, as mentioned, the fastening points for the dirty fluid tank device 32 on the base 30.
- the holders 154 are designed as holding domes or holding mushrooms.
- the holder 154 and the associated receptacle 160 form a holder-receptacle combination 162, which is designed as a locking connection device.
- a corresponding holding position or locking position is shown.
- the holder 154 comprises a first element 164 which corresponds to a second element 166 of the receptacle 160 on the dirty fluid tank device 32.
- the first element 164 has a receiving area 168 for the second element 166.
- This receiving area 168 is, for example, cylindrical.
- the receiving area 168 of the first element 164 is delimited by a bead 170.
- the bead 170 has a diameter (in a direction transverse to the height axis 92) which is larger than the corresponding diameter of the receiving area 168.
- the bead 170 is arranged as an annular region on the first element 164. It has a first surface region 172 which faces the receiving region 168. The first surface region 172 is followed by a second surface region 174 which faces away from the receiving region 168.
- the bead 170 is conical on the first surface area 172 away from the receiving area 168. It is also conical on the second surface area 174 with an inclination towards the receiving area 168.
- the first surface area 172 forms an inclined plane which, as will be explained in more detail below, requires an effort to detach the second element 166 from the first element 164.
- the second surface area 174 also forms an inclined plane which requires an effort to connect the second element 166 to the first element 164.
- the cone angle of the first surface area 172 is greater than the cone angle of the second surface area 174 (see Figure 11 ).
- the first cone angle for the first surface area 172 is designated with the reference number 176.
- the second cone angle for the second surface area 174 is designated with 178.
- the second cone angle 178 is smaller than the first cone angle 176. This means that the force required to release and remove the dirty fluid tank device 32 from the base 30 is greater than to insert (to fix) the dirty fluid tank device 32 to the base 30.
- the second element 166 on the receptacle 160 of the dirty fluid tank device 32 is designed as a spreading element which has at least two and preferably at least three tabs which are movable transversely to the vertical axis 92 (with an increase in the distance).
- the second element 166 as a spreading element is pushed onto the holder 154.
- the second element 166 of the second surface area 174 is moved over to spread it out, increasing the distance between the tabs until the receptacle area 168 is reached.
- the tabs of the spreading element 166 are arranged in particular in a spring-loaded manner and snap back.
- the bead 170 serves as a lock which prevents the dirty fluid tank device 32 from falling off the base 30.
- a locking connection is established via the holder-receiver combination 162.
- an operator applies force to the dirty fluid tank device 32 and moves the second element (the expansion element) over the bead 170 and thereby over the first surface area 172. a corresponding effort is required to spread the second element 166 (the spreading element) in order to expand the cross-section accordingly so that the bead 170 can be driven over by the second element 166.
- FIG. 13 A corresponding intermediate state after driving over is in Figure 13 shown. There, the locking connection is removed.
- the expansion element 166 (the second element 166) has passed over the bead 170 and is located outside the receiving area 168.
- the receptacles 160 on the dirty fluid tank device 32 are open on the top side 128 in order to allow the corresponding holder 154 to be immersed.
- the receptacle has a hollow truncated cone-shaped extension 180 towards the top side 128. This extension 180 forms an insertion aid and centering aid for the holder 154, which is designed in the shape of a pin, in the associated receptacle 160.
- the dirty fluid tank device 32 is held on the base 30 via the holder-receiver combination 162 (at the points 156, 158), then the dirty fluid tank device 32 is mounted so that it can move (in a direction/opposite direction parallel to the vertical axis 92) and is therefore mounted in a floating manner.
- the weight of the floor cleaning machine 10 is supported on the floor 16 to be cleaned via the cleaning roller unit 18 and the support element 120.
- the dirty fluid tank device 32 has no supporting function in this regard.
- the dirty fluid tank device 32 is mounted so that it can move (float) transversely and in particular perpendicularly to the installation surface 14.
- the sweeping element 62 is still in its optimal position relative to the floor 16 to be cleaned.
- the holding rod device 36 Due to the pivot joint 84, the holding rod device 36 has a pivot angle range of the pivoting mobility to the cleaning head 12, which lies between a lower limit and an upper limit.
- a swivel angle of 182 (compare Figure 19(a) ) is in particular quantitatively defined as an angle between the second longitudinal axis 42 of the holding rod device 36 and a plane 184 parallel to the installation surface 14.
- a minimum swivel angle 182, i.e. the lower limit, is 0° or greater than 0°.
- the lower limit is less than 50° and preferably less than 40° and in particular preferably less than 30°.
- the lower limit is determined by the attachment of the holding rod device 36 to a lower side, which defines the free space 102 (compare Figure 9 ) limited, predetermined.
- the lower limit can be approximately 0° and can in particular be less than 10° and preferably less than 5°.
- the swivel angle range has an upper limit ( Figure 19(b) ).
- the upper limit of the swivel angle 182 is specified as the locking position ( Figure 19 ). It lies in particular in the range between 80° and 120° of the swivel angle 182. In a preferred embodiment it is approximately 90° ( Figure 19(b) ).
- the upper limit is such that a parking position with a locking position with respect to the cleaning head 12 is provided for the holding rod device 36, wherein pivoting with respect to the cleaning head 12 is then blocked in the sense that an increased effort of force is necessary in order to enable pivoting of the holding rod device 36 on the pivot joint 84 about the pivot axis 40 again.
- the holder-receiver combination 162 was described using a holder 154, which is firmly connected to the base 30, and a receiver 160, which is arranged on the dirty fluid tank device 32.
- the holder 154 is rod-shaped and the receiver 160 is an opening.
- a kinematic reversal is also possible, in which a rod-shaped element is arranged on the dirty fluid tank device 32 and a corresponding receiver in the form of an opening on the base 30.
- a locking device 186 ( Figures 10 , 12 ) is provided.
- the locking device 186 comprises one and in particular at least two and preferably exactly two ( Figures 10 , 12 ).
- the pin-immersion opening combinations 188 are arranged in the area of the swivel joint 84.
- FIG. 9 a first location 190 and a second location 192 are shown, at which respective pin-immersion opening combinations 188 are positioned.
- the first location 190 and the second location 192 are mirror-symmetrical to the center plane 94.
- the pin-immersion opening combination 188 comprises a respective immersion opening 194, which is arranged on the cleaning head 12 and in particular on the base 30 in a rotationally fixed manner with respect to the web guide device 86.
- a pin 196 is provided which is connected in a rotationally fixed manner to the holding rod device 36 and can be pivoted therewith about the pivot axis 40 relative to the cleaning head 12.
- the pin 196 is seated on a guide 198 and is linearly displaceable along a displacement axis 200.
- the displacement axis 200 is movable with the pivoting mobility of the holding rod device 36 to the cleaning head 12. It is oriented transversely to a circumference of the circular path section 88.
- the pin 196 is spring-loaded via a spring device 202, wherein a spring force of the spring device 202 strives to press the pin 196 in the direction of the circumference of the circular path section 88.
- the spring force of the spring device 202 acts on the cleaning head 12.
- the pin 196 has a bead 204 ( Figure 10 ), which is arranged in a ring shape.
- the guide 198 has an annular stop 206 for the bead 204. By the bead 204 resting on the stop 206, a lock for the linear displaceability of the pin 196 on the guide 198 is formed ( Figure 10 ).
- a basic position of the pin 196 is such that the spring device 202 presses the pin 196 towards the circumference of the circular path section 88 until the bead 204 rests against the stop 206 ( Figure 10 ). This The basic position is present when the pin 196 is not immersed in the immersion opening 194.
- the basic position is present when the parking position 185 of the holding rod device 36 and the cleaning head 12 is not reached, that is, when the upper limit of the swivel angle 182 is not reached. See Figure 10 , wherein the pin 196 is not immersed in the immersion opening 194.
- the respective immersion opening 194 is formed on a block element 208.
- the block element 208 includes the immersion opening 194 as a recess or bore.
- a first inclined plane 210 is arranged or formed on the block element 208 outside the immersion opening 194. This rises from the circular path section 88. It is located at the end of the circular path section 88 and the distance to the pivot axis 40 increases on the first inclined plane 210.
- the first inclined plane 210 serves to insert the pin 196 into the insertion opening 194 while displacing the pin 196 away from the stop 206 with a corresponding amount of force against the spring force of the spring device 202. This amount of force must be applied by an operator.
- the pin 196 has a first contact surface 212 which is formed on a front end of the pin 196.
- the first contact surface 212 is adapted to the first inclined plane 210.
- the immersion opening 194, which is formed in the block element 208, has a wall which is designed as a second inclined plane 214.
- the pin 196 is guided along the circular path section 88 while increasing the pivot angle 182 and then over the first inclined plane 210 into the immersion opening 194.
- the second inclined plane 214 serves to guide the pin 196 out of the immersion opening 194 by reducing the pivot angle 182 starting from the upper limit.
- the pin 196 has a second contact surface 216 which is adapted to the second inclined plane 214.
- the second contact surface 216 is guided along the second inclined plane 214 (while reducing the pivot angle 182). To do this, the spring force of the spring device 202 must be overcome.
- the first inclined plane 210 has a smaller angle than the second inclined plane 214.
- the force required to release the lock by guiding the pin 196 out of the insertion opening 194 is greater than the force required to bring the pin 196 into the insertion opening 194 via the second inclined plane 214 and to establish the lock and thereby reach the parking position 185.
- An alternative embodiment of a pin 196' ( Figure 14 ) has a contact surface 197 at one tip, which is conical.
- the pin is spherical at the tip (in Figure 14 indicated in broken lines).
- the pin 196 or the pin 196' is made in particular from a metallic material.
- a circular path section 88 is provided which is separate from this circular path section 88 for the counter device 90, but is concentric to the pivot axis 40.
- FIG 19(a) A "working" swivel position is shown.
- the swivel angle 182 is between the lower limit and the upper limit.
- the floor 16 to be cleaned can be processed by the floor cleaning machine 10 in order to carry out a cleaning process.
- An operator adjusts the swivel angle 182 to his body size. If a piece of furniture or the like is to be driven under, the swivel angle 182 is reduced.
- the operator guides the cleaning head 12 over the floor 16 to be cleaned via the holding rod device 36 with the adjusted swivel angle 182.
- the cleaning roller unit 18 rotates about the rotation axis 46. Due to the direction of rotation 52, the cleaning head 12 and thus the floor cleaning machine 10 are propelled forward.
- the holding rod device 36 is directly connected to the roller holder 106 and thus to the cleaning roller unit 18.
- the cleaning roller unit 18 is pivoted as well. If it is supported on the floor 16 to be cleaned, it rolls on the floor 16. This movement is superimposed on the rotation of the cleaning roller unit 18 about the rotation axis 46 and has no negative effect on the cleaning result or the like. Due to the rotation of the cleaning roller unit 18, the angular range that the cleaning roller unit 18 moves through in the same unit of time as during a pivoting movement is much larger.
- the holding rod device 36 is directly connected to the cleaning roller unit 18 and acts with its weight directly on the cleaning roller unit 18.
- the weight of the holding rod device 36 presses the cleaning roller unit 18 with the roller parts 116, 118 against the floor 16 to be cleaned.
- the holding rod device 36 provides a contact force of the cleaning roller unit 18 against the floor 16 to be cleaned via its own weight. This improves the cleaning effect; the mechanical effect of the cleaning roller unit 18 on the floor 16 to be cleaned is improved.
- the dirt removal ability of the floor cleaning machine 10 is improved.
- the described design of the swivel joint 84 as an orbital swivel joint results in a large swivel range between the lower limit and the upper limit.
- the operator increases the swivel angle 182 until the parking position 185 is reached ( Figure 19(b) ) and the holding rod device 36 is locked to the cleaning head 12 via the locking device 186.
- the holding rod device 36 cannot "fall down” by itself (due to its own weight) while reducing the pivot angle 182 in the direction of the lower limit.
- the floor cleaning machine 10 is parked, for example, for storage.
- an automated cleaning process of the cleaning roller unit 18 and possibly other parts of the cleaning head 12 is carried out via a corresponding cleaning station or parking station (not shown in the figures).
- a corresponding cleaning station or parking station not shown in the figures.
- the dirty fluid tank device 32 can also be emptied in the floor station.
- the dirty fluid tank device 32 can also be easily removed from the cleaning head 12 ( Figure 19(c), (d) ).
- This torque is applied in the parking position 185, in which the holding rod device 36 is locked to the base 30 by the locking device 186. If necessary, the pivot angle 182 can be increased somewhat by play at the play-immersion opening combinations 188. When this play is exhausted, the cleaning head 12, which is then supported on the floor 16 in particular via the cleaning roller unit 18, rotates relative to the dirty fluid tank device 32. The base 30 is raised relative to the dirty fluid tank device 32.
- the dirty fluid tank device 32 Due to the operator intervention on the tread plate 34, the dirty fluid tank device 32 remains on the floor 16. An operator has fixed the dirty fluid tank device 32 to the floor 16 via the force 220.
- the cleaning head 12 it is also possible for the cleaning head 12 to be removed from the dirty fluid tank device 32 by pulling it upwards, whereby an operator fixes the dirty fluid tank device 32 to the floor 16 by exerting force on the treadle 34.
- FIG 19(e) a situation is shown in which the cleaning head 12 is placed back on the dirty fluid tank device 32, i.e. in which the dirty fluid tank device 32 is fixed to the cleaning head 12.
- the dirty fluid tank device 32 is placed on the floor 16. If necessary, an operator fixes the dirty fluid tank device 32 to the floor 16 by exerting force on the tread plate 34.
- the cleaning head 12 is then placed from above onto the dirty fluid tank device 32 in such a way that the corresponding holder 154 is immersed in the associated receptacle 60 on the dirty fluid tank device 32 until a locking mechanism is achieved (and the respective second element 166 then lies in the associated receptacle area 168 of the first element 164).
- the cleaning head 12 is preferably placed in a parking position 185 of the holding rod device 36 relative to the cleaning head 12, i.e. with the holding rod device 36 being locked to the cleaning head 12 by the locking device 186.
- an operator can remove the dirty fluid tank device 32 from the cleaning head 12 and insert the dirty fluid tank device 32 into the cleaning head 12 hands-free, i.e. he does not have to touch the dirty fluid tank device 32. In particular, he can carry out the corresponding processes by touching and holding the holding rod device 36. He also does not have to bend down or kneel down to do so.
- the stripping element 70 is movably arranged on the cleaning head 12 and on the base 30 via the holder 72.
- the holder 72 has a base 222.
- the base 222 has a rear end 224 and a front end 226.
- the base 222 is wider towards the front end 226 than at the rear end 224;
- the base 222 has a first region 228 and a second region 230, with the rear end 224 located at the first region 228 and the front end 226 located at the second region 230.
- the holder 72 is pivotally mounted on the base 30 of the cleaning head 2 via the first region 228.
- the second region 230 carries the stripping element 70 and a comb element 232.
- Shaft stubs 234 are arranged on the first area 228 and protrude laterally outwards. Shaft stubs 234 are provided opposite one another and are aligned. A pivot axis 236 is defined by the shaft stubs 234. When the holder 72 is fixed to the base 30, the pivot axis 236 is parallel to the pivot axis 40 or parallel to the rotation axis 46. It is parallel to the installation surface 14.
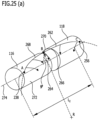
- a continuous stripping element 70 is provided for the cleaning roller unit 18, which acts on both the first roller part 116 and the second roller part 118 ( Figure 25(a) ).
- no recess or the like is provided for the middle part 114.
- the stripping element 70 extends continuously between a first front end 238 and an opposite second front end 240.
- the stripping element 70 is arranged or designed as a web on the second region 230.
- this web is integrally connected to the second region 230, that is, integrally connected to the holder 72.
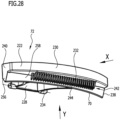
- the comb element 232 is also located on the holder 72. It acts on the cleaning roller unit 18 and serves to collect hair; the comb element 232 is a hair comb.
- the comb element 232 comprises at least one row 242 and in particular a plurality of rows 242 of pins 244. Adjacent pins 244 are spaced apart from one another. A pin dips into a trim 246 (see, for example, Figure 20 ) of the cleaning roller unit 18 in order to "filter out" hair from the cleaning roller unit 18.
- stripping element 70 dips into the trimming 246.
- the comb element 232 is arranged downstream of the stripping element 70.
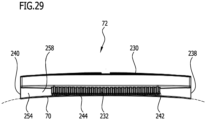
- the comb element 232 (the rows 242) are arranged on the second region 230 between the front end 226 and the stripping element 70 (see Figure 30 ).
- the comb element 232 extends over a smaller transverse length than the stripping element 70, that is, a distance between the outer ends of the comb element 232 is smaller than a distance between the front ends 238 and 240 of the stripping element 70 ( Figure 30 ).
- the holder 72 is pivotally mounted on the base 30. It is spring-loaded to press the stripping element 70 and the comb element 232 into the trimming 246.
- a corresponding spring device is provided, which is arranged, for example, in the area of the shaft stubs 234 on the corresponding pivot bearing 250. This is shown in Figure 20 indicated by the reference numeral 252.
- a corresponding spiral spring of the spring device is supported on the base 30 and on the second region of the holder 72 in order to press the latter against the cleaning roller unit 18.
- the stripping element 70 is arranged as a web 254 on the second region 30.
- This web 254 has a first flank 256 which faces the mouth opening 56. It has an opposite second flank 258 which faces away from the mouth opening 56 ( Figure 20 ).
- the second flank 258 faces the comb element 232.
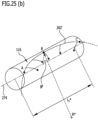
- a contact line 262 ( Figure 25 ) is formed. This corresponds to the edge profile and can be described by a mathematical curve.
- the web 254 of the stripping element 70 has a triangular shape in cross section over the first flank 256 and the second flank 258 (compare Figure 20 ).
- the contact line 262 has a finite width.
- the contact line 262 is located in the setting 246 (compare Figure 20 ) or at least rests against the trim 246.
- the stripping element 70 rests against or is immersed in the trim 246 via the contact line 262.
- the stripping element 70 is designed as a guide element for dirt fluid on the cleaning roller unit 18.
- the design is in one embodiment ( Figure 25(a) ) such that dirt fluid is not only detached from the cleaning roller unit 18 (from the trimmings 246) via the stripping element 70, but is also guided in a defined manner to a central region 264.
- This central region 264 is located on the cleaning roller unit 18 and on the stripping element 70. Starting from the central region 264, dirt fluid is (predominantly) coupled into the mouth opening 56.
- the central region 264 is located on the central plane 94.
- the stripping element 70 is curved.
- the contact line 262 has a first length L 1 (arc length) between the first front end 238 and the second front end 240.
- a distance D between the first front end 238 and the second front end 240, wherein a spacing direction for the distance D is parallel to the pivot axis 236 or parallel to the pivot axis 40 or parallel to the rotation axis 46, is smaller than this length L 1 .
- the cleaning roller unit 18 (as a combination of first cleaning roller 116 and second cleaning roller 118 with a distance between them) in the distance direction (i.e. parallel to the rotation axis 46) a second length
- the curvature of the stripping element 70 at the contact line 262 can be two-dimensional or three-dimensional in the sense that a mathematical curve which describes the course of the contact line 262 and is a curved curve can be a plane curve (two-dimensional curvature) or a space curve (three-dimensional curvature).
- the corresponding curve which mathematically describes the course of the contact line 262 then has a first curvature (in the sense of a differential geometric curvature), or has a first curvature and a second curvature.
- the first curvature is negative, that is, the corresponding mathematical curve describing the course of the contact line 262 is concave, or the first curvature and the second curvature are each negative and the corresponding curve is a concave curve.
- the mouth device 54 forms a discharge area for dirty fluid from the cleaning roller unit 18 into the dirty fluid tank device 32.
- the contact line 262 is concave towards this discharge area, i.e. towards the mouth opening 56. This concave formation is located on the first flank 256.
- the contact line 262 has the shape of a circular arc section.
- the corresponding mathematical curve which describes the course of the contact line 262 has a constant curvature.
- a first curvature can be provided which is constant, and if the contact line 262 can be described by a spatial curve, a constant second curvature can be present.
- a radius of curvature R lies in the range between 2L 2 and 6L 2 (2L 2 ⁇ R ⁇ 6L 2 ).
- the stripping element 70 has a vertex 270 above the contact line 262, which in one embodiment (cf. Figure 25(a) ) is arranged on the center plane 94.
- the course of the mathematical curve which describes the course of the contact line 262 can be described in cylindrical coordinates.
- the contact line 262 is mirror-symmetrical with respect to the vertex 270 or the center plane 94 ( Figure 25(a) ).
- a polar angle ⁇ varies along the curve.
- Figure 21 is a section through the cleaning head 12 at point A according to Figure 25 shown, and in Figure 22 a cut at point B (that is, at vertex 270).
- the mouth opening 56 has a third length L 3 along the stripping element 70, which is smaller than the first length L 1 . Due to the guiding function of the stripping element 70, dirty fluid is also transported to the discharge area (towards the mouth opening 56) on the cleaning roller unit 18. A smaller mouth opening 56 is then sufficient. This in turn reduces the area of dirt on the floor cleaning machine 10.
- a guide area for dirty fluid is created on the surface of the cleaning roller unit 18 and also in a penetration area of the stripping element 70 due to the curvature of the stripping element 70, via which dirty fluid is guided on the cleaning roller unit 18 by means of the stripping element 70 to the central area 264.
- This allows the discharge area to be made smaller in relation to the distance direction parallel to the rotation axis 46, i.e. the mouth opening 56 can be made with a smaller length L 3 than, for example, with a straight stripping element 70.
- any foam that may occur on the cleaning roller unit 18 is guided to the central region 264 by the stripping element 70. As a result, the emergence of foam at the front ends of the cleaning roller unit 18 is reduced or at least greatly reduced.
- a stripping element 70 was described which is assigned to the cleaning roller unit 18 with first roller part 116 and second roller part 118 and in which the apex 270 is arranged on a center plane.
- each roller part 116 or 118 is assigned its own stripping element, wherein in particular these stripping elements are arranged on a single holder (the holder 72).
- the first roller part has a length L 2 *.
- This length L 2 * lies between the corresponding front ends of the first roller part 116 (or the second roller part 118).
- the corresponding edge element has the edge profile 262', which is symmetrical.
- the corresponding stripping element which is assigned to the first roller part 116 (or the second roller part 118), is circularly curved, with a radius of curvature R* lying in particular in the range between 2L 2 * and 6L 2 * (2L 2 * ⁇ R* ⁇ 6L 2 *).
- the combination of the stripping elements has a "double hump shape", whereby in the combination the corresponding stripping elements can then be spaced apart or can be continuous.
- the corresponding curved course of the stripping element 70 is asymmetrical and has no vertex or no vertex at a median plane. It In particular, this can be done by specifically draining dirty fluid to a page 310 ( Figure 26 ) or to a page 312 ( Figure 27 ) take place.
- the course of the stripping element 70 refers to the cleaning roller unit 18 as a whole with a combination of the first roller part 116 and the second roller part 118, or refers to only one roller part 116 or 118.
- the course is as follows Figures 26 or 27 asymmetrical.
- the overall course is symmetrical with respect to the cleaning roller unit 18 with first roller part 116 and second roller part 118.
- a discharge to the outside takes place.
- the design of the curved scraper element is also possible if the cleaning roller unit has only one roller part.
- the design of the scraper element 70 with a curvature was described using the floor cleaning machine 10. This solution of the curved design can also be used on other types of surface cleaning machines, such as a self-propelled and self-steering cleaning machine (cleaning robot).
- the floor cleaning machine 10 functions as follows: For cleaning operation, the cleaning head 12 is placed on the floor 16 to be cleaned. An operator guides the cleaning head 12 over the floor 16 to be cleaned using the holding rod device 36. After switching on the cleaning roller unit 18 rotates about the rotation axis 46, whereby the drive is provided by the drive motor 98.
- cleaning fluid is supplied from the tank device 50 for cleaning fluid, in particular to the cleaning roller unit 18.
- the floor 16 to be cleaned is thereby moistened for better dirt removal. Dirt is taken along and transported via the cleaning roller unit 18 to the scraper element 70. Dirty fluid, which is then in particular liquid with dirt particles, is separated from the cleaning roller unit 18 and conveyed into the dirty fluid tank device 32.
- the guiding element function of the scraper element 70 due to the corresponding curvature results in a simplified discharge of dirty fluid.
- Coarse dirt can also be picked up.
- the sweeping element 62 ensures that coarse dirt is fed to the cleaning roller unit 18. This transports the coarse dirt directly into the dirt fluid tank device 32 and/or it is removed via the scraper element 70.
- Hair is removed from the cleaning roller unit 18 via the comb element 232.
- the cleaning roller unit 18, in which the trim 246 is a textile material, is used in particular for wet cleaning operations.
- the cleaning roller unit 18 can also be used for a sweeping operation.
- the floor cleaning machine 10 enables either dry cleaning or wet cleaning as required.
- the orbital joint 84 supports the holding rod device 36 on the cleaning roller unit 18 and a corresponding contact force is exerted on the floor 16 to be cleaned. This increases the mechanical effect of the cleaning roller unit 18 on the floor 16 to be cleaned and improves the dirt removal and dirt absorption capacity of the floor cleaning machine 10.
- the cleaning roller unit 18 experiences a maximum contact pressure via the holding rod device 36 via the floor cleaning machine 10 itself.
- the dirt fluid tank device 32 always remains in the same position relative to the floor 16 to be cleaned. This also allows the sweeping element 62 to be kept in the same position relative to the floor 16. This results in improved coarse dirt collection and overall improved cleaning.
- the dirty fluid tank device 32 can be easily removed from the cleaning head 12 or the cleaning head 12 can be easily placed on the dirty fluid tank device 32.
- an operator does not have to touch the dirty fluid tank device 32 with his hands in order to remove it or to insert it.
- the pivot joint 84 as an orbital joint, it is ensured that for each pivot position of the holding rod device 36 relative to the cleaning head 12 about the pivot axis 40 within the pivot angle range, the dirty fluid tank device 32 always assumes the same position relative to the floor 16 and remains parallel to the floor 16.
- the at least one support element 120 which is arranged on the base 30 (and not on the dirty fluid tank device 32), results in an optimized support of the weight of the cleaning head 12 with the dirty fluid tank device 32 on the floor 16 to be cleaned.
- a dirty fluid tank device 32 with a relatively large storage volume for dirty fluid can be realized.
- the holding rod device 36 is provided with the ability to rotate about the axis of rotation 41, particularly with respect to the handle 38.
- the holding rod device 36 comprises a first part 278 and a second part 280, wherein the second part 280 is rotatable about the axis of rotation 41 relative to the first part 278.
- the first portion 278 coincides with the first region 76 and the second portion 280 coincides with the second region 78 of the support rod assembly 36.
- the rotary member 41 is coaxial with the first longitudinal axis 80. In principle, however, it is also possible that the rotary axis 41 for example, parallel to the second longitudinal axis 42. In the following, an embodiment is described in which the axis of rotation 41 is parallel to the first longitudinal axis 80.
- a locking device 282 is provided ( Figures 15 to 18 ), which on the one hand, outside of a locking position 284, releases the rotatability of the second part 280 to the first part 278 (the second area 78 to the first area 76) ( Figures 15 , 16 ) and in the locking position 284, the rotatability of the second part 280 of the holding rod device 36 to the first part 278 of the holding rod device 36 about the axis of rotation 41 is blocked ( Figures 17 , 18 ).
- the locking device 284 comprises a slider 288, which is arranged to be movable and in particular linearly movable on the first part 278 (on the first region 76).
- a displacement axis 289 is in particular parallel to the rotation axis 41.
- the slide 288 has a nose 290 in the region of a first end (compare for example Figure 16 ). Via this nose 290, the slide 288 can be supported on the cleaning head 12 and there on a corresponding counter surface 292. Outside the parking position 185, the nose 290 is spaced from the counter surface 292. When the parking position 185 is reached, the nose 290 acts on the counter surface 292 and this causes a displacement of the slide 288 in the displacement direction 289.
- the slide 288 is spring-supported and is thereby attached to the first Part 278 is mounted.
- the spring device is arranged and designed in such a way that it presses the slide 288 with the nose 290 in the direction of the cleaning head 12.
- the slide 288 has an immersion element 296.
- the immersion element 296 can immerse itself in a corresponding immersion opening 298 of the second part 280 in the parking position 185. This achieves a positive connection with regard to the rotatability about the axis of rotation 41 and the second part 280 of the holding rod device 36 (the second region 78) can no longer rotate about the axis of rotation 41 relative to the first part 278 (the first region 76).
- the slide 288 as a whole is pushed in the direction of the second part 280 and the immersion element 296 immerses in the immersion opening 298 (with appropriate alignment of the second part 280 to the first part 278) and in the corresponding locking position 284, the rotatability of the second part 280 to the first part 278 about the rotation axis 41 is blocked.
- the spring device 294 acts on the slide 288 in such a way that it moves it in the direction of the cleaning head 12 or holds it there.
- the immersion element 296 is then out of the immersion opening 298 and outside the locking position 284, the second part 280 can be rotated about the axis of rotation 41 relative to the first part 278.
- the locking device 284 has an overload protection 300.
- This overload protection 300 essentially serves to prevent damage in the event of rotation in the parking position 185 about the rotation axis 41.
- the slide 288 is formed in (at least) two parts with a first part 302 and a second part 304.
- the nose 290 is seated on the first part 302.
- the immersion element 296 is seated on the second part 304.
- the second part 304 is slidably mounted on the first part 302, with support via a spring device 306.
- the spring device 306 is "hard” compared to the spring device 294 and in particular substantially harder than the spring device 294.
- the spring force of the spring device 306 acts in such a way that it pushes the second part 304 away from the first part 302 until a stop 308 (compare for example Figure 16 ) of the second part 304 on the first part 302 is reached.
- the slide 288 as a whole with the first part 302 and the second part 304 is movable in the direction of displacement 289.
- the slide 288 with the first part 302 and the second part 304 can accordingly reach the locking position 284 in the parking position 185 and lie outside the parking position 185 outside the locking position 284 and enable the rotation of the second part 280 relative to the first part 278 about the axis of rotation 41.
- the slide 288 In the locking position 284, the slide 288 cannot move in relation to the direction of displacement 289 or can only move with a certain amount of play.
- a movement lock towards the cleaning head 12 is achieved by the nose 290.
- This movement lock towards the second part 280 is achieved by the immersion element 296 immersed in the immersion opening 298.
- the slide 288 cannot move as a whole in the direction of displacement 289.
- the second part 304 can move relative to the first part 302 by overcoming the spring force of the spring device 306 and can move away from the stop 308. This allows the immersion element 296 in particular to move out of the immersion opening 298. This reduces the risk of damage because it allows for movement.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Cleaning By Liquid Or Steam (AREA)
- Cleaning Implements For Floors, Carpets, Furniture, Walls, And The Like (AREA)
- Cleaning In General (AREA)
Description
- Die Erfindung betrifft eine Bodenreinigungsmaschine, umfassend einen Reinigungskopf, eine Haltestabeinrichtung, welche mit dem Reinigungskopf verbunden ist, mindestens eine Reinigungswalzeneinheit, welche an dem Reinigungskopf angeordnet ist, eine Schmutzfluidtankeinrichtung, welche abnehmbar an einer Basis des Reinigungskopfs angeordnet ist, und mindestens ein Abstützelement, welches an der Basis des Reinigungskopfs angeordnet ist, und welches beabstandet zu der mindestens einen Reinigungswalzeneinheit ist, wobei bei einem Reinigungsbetrieb der Reinigungskopf sich über die mindestens eine Reinigungswalzeneinheit und das mindestens eine Abstützelement an einem zu reinigenden Boden abstützt.
- Die
WO 2021/013343 A1 offenbart eine Bodenreinigungsmaschine mit einem Bodenkopf, wobei in einer Parkposition der Bodenreinigungsmaschine der Bodenkopf durch eine Standfußeinrichtung derart an einer Unterlage abgestützt ist, dass eine Reinigungswalze beabstandet zu der Unterlage ist, wobei eine Tankeinrichtung mindestens eine durchgehende Ausnehmung aufweist, durch welche mindestens in der Parkposition ein Standfuß der Standfußeinrichtung durchgetaucht ist. - Die
US 6,968,593 B1 offenbart einen handgehaltenen Flüssigkeits-Extraktionsreiniger zum Reinigen einer Oberfläche. - Die
US 5,657,504 offenbart einen Reinigungsmopp zur Reinigung von Böden und zum Entfernen von Staubpartikeln von dem Boden. - Die
US 2010/0251505 A1 und dieUS 2017/0127901 A1 offenbaren weitere Bodenreinigungsmaschinen. - Die
DE 20 2015 101 302 U1 offenbart ein Reinigungsgerät in Form eines Staubsaugers. - Aus den
WO 2016/058901 A1 ,WO 2016/058856 A1 ,WO 2017/063663 A1 ,WO 2016/058879 A1 ,WO 2016/058956 A1 sind Flächen-Reinigungsmaschinen bekannt. Aus derWO 2016/058907 A1 ist ebenfalls eine Flächen-Reinigungsmaschine bekannt. - Aus der
US 4,875,246 ist eine tragbare Bodenreinigungsvorrichtung bekannt, welche eine durch einen elektrischen Motor angetriebene Walze aufweist. - Aus der
DE 20 2009 013 434 U1 ist eine Vorrichtung zur Fußboden-Nassreinigung mit einer Bürste, welche um eine Rotationsachse drehbar ist, bekannt. - Aus der
CN 201 197 698 Y ist eine Reinigungsmaschine bekannt. - Aus der
US 6,026,529 ist eine Vorrichtung zum Reinigen von Böden oder andere Hartflächen bekannt. - Aus der
WO 2010/041185 A1 ist eine Flächen-Reinigungsmaschine mit rotierenden Bürsten bekannt. - Aus der
US 7,665,174 B2 ist ein Reinigungskopf für eine Bodenreinigungsmaschine bekannt. - Aus der
US 4,173,054 ist ein Bodenreiniger bekannt, welcher einen Handgriff, einen Hauptkörper, einen Walzenmechanismus mit einer Walze mit einem Reinigungsgürtel, einen Scraper und eine Schmutzfluidaufnahme umfasst. - Aus der
WO 2013/106762 A2 ist eine Oberflächenreinigungsmaschine mit einer Reinigungswalze und einer Antriebseinheit zum Antrieb der Reinigungswalze bekannt. Es ist eine Schmutzschale vorgesehen, in welche die Reinigungswalze bei der Rotation Schmutz kehrt. Die Schmutzschale kann geöffnet werden. - Aus der
US 7,921,497 B2 ist ein Flurschrubbgerät bekannt, welches manuell betrieben ist und eine Antriebswalze umfasst, die an eine Schrubbwalze gekoppelt ist. - Aus der
WO 2015/086083 A1 ist eine weitere Bodenreinigungsmaschine bekannt. - Aus der
US 3,789,449 ist ein Hartboden-Reinigungsgerät bekannt. - Aus der
DE 103 57 637 A1 ist ein selbstfahrendes Kehrgerät mit einer Kehrbürste und einem zugeordneten Schmutzsammelraum bekannt. - Aus der
DE 10 2007 054 500 A1 ist ein Haushalts-Bodenreinigungsgerät mit einer Wischwalze bekannt. - Aus der
US 2006/0272120 A1 ist ein Bodenreinigungsgerät mit einem Gehäuse, einer Schlauchanordnung und einem Reinigungskopf bekannt. - Aus der
DE 10 2017 120 723 A1 ist eine Reinigungsmaschinen-Station für eine Reinigungsmaschine bekannt, wobei die Reinigungsmaschinen-Station eine Aufnahmekammer für einen Reinigungskopf der Reinigungsmaschine aufweist. - Aus der
WO 2005/087075 A1 ist eine Bodenreinigungsmaschine mit einem Handgriff bekannt, welcher schwenkbar an einer Basis angeordnet ist. - Die
CN 107007215 A offenbart einen Bodenreinigungsroboter. - Die
DE 20 2018 104 772 U1 offenbart einen Schmutzwassersammelmechanismus und Schmutzwasserdetektionsmechanismus und eine Reinigungsvorrichtung. - Reinigungsmaschinen sind auch aus der
AU 2017101723 A4 CN 206687671 U , derDE 20 2016 105 300 U1 , derUS 9,622,637 B1 CN 205359367 U , derUS 2017/0119225 A1 , derCN 205181250 U , derCN 205181251 U , derCN 205181256 U , derDE 20 2016 105 299 U , derWO 2017/059602 A1 , derWO 2017/059600 A1 , derWO 2017/059601 A1 , derWO 2017/059603 A1 oder derDE 20 2016 105 301 U1 bekannt. - Der Erfindung liegt die Aufgabe zugrunde, eine Bodenreinigungsmaschine der eingangs genannten Art bereitzustellen, welche optimierte Reinigungsergebnisse aufweist.
- Diese Aufgabe wird bei der eingangs genannten Bodenreinigungsmaschine erfindungsgemäß dadurch gelöst, dass die Schmutzfluidtankeinrichtung eine dem mindestens einen Abstützelemente zugeordnete durchgehende Ausnehmung aufweist, durch welche das mindestens eine Abstützelement durchgeführt ist, wenn die Schmutzfluidtankeinrichtung an dem Reinigungskopf sitzt.
- Bei einem Reinigungsbetrieb wird das Gewicht des Reinigungskopf mit der Haltstabeinrichtung durch die mindestens eine Reinigungswalzeneinheit und das mindestens eine Abstützelement an dem Boden abgestützt. Dadurch lässt sich die Schmutzfluidtankeinrichtung auf einfache Weise an der Basis halten und insbesondere schwimmend halten.
- Durch die durchgehende Ausnehmung an der Schmutzfluidtankeinrichtung, welche dem mindestens einen Abstützelement zugeordnet ist, lässt sich die Schmutzfluidtankeinrichtung mit einem großen Aufnahmevolumen trotz Vorhandensein des mindestens einen Abstützelements bereitstellen.
- Günstig ist es, wenn über die mindestens eine Reinigungswalzeneinheit und das mindestens eine Abstützelement eine Aufstellfläche für den Reinigungskopf vorgesehen ist, insbesondere mit mindestens einem der Folgenden:
- die Aufstellfläche ist eine ebene Fläche;
- eine Rotationsachse der mindestens einen Reinigungswalzeneinheit ist parallel zu der Aufstellfläche;
- die Haltestabeinrichtung ist schwenkbar um eine Schwenkachse an den Reinigungskopf angelenkt und die Schwenkachse ist parallel zur Aufstellfläche;
- eine Entnahmerichtung zum Abnehmen der Schmutzfluidtankeinrichtung von dem Reinigungskopf und eine Einsetzrichtung zum Einsetzen der Schmutzfluidtankeinrichtung an dem Reinigungskopf ist jeweils quer und insbesondere senkrecht zu der Aufstellfläche;
- die Schmutzfluidtankeinrichtung ist nach unten in Richtung der Aufstellfläche von dem Reinigungskopf abnehmbar;
- die Basis ist in einer Höhenrichtung beabstandet zu der Aufstellfläche.
- Es ergibt sich so eine optimierte Bedienbarkeit. Durch die Entnahmerichtung quer zu der Aufstellfläche lässt sich die Schmutzfluidtankeinrichtung auf einfache Weise von der Basis entnehmen bzw. an der Basis einsetzen. Insbesondere lässt sich auf einfache Weise eine Verriegelung der Schmutzfluidtankeinrichtung mit der Basis aufheben bzw. herstellen. Weiterhin lässt sich auf konstruktiv einfache Weise die Schmutzfluidtankeinrichtung beweglich und insbesondere schwimmend an der Basis halten. Insbesondere ist eine hängende Lagerung vorgesehen.
- Günstig ist es, wenn das mindestens eine Abstützelement eine Rolle oder einen Gleiter umfasst. Dadurch lässt sich durch einen Bediener auf einfache Weise der Reinigungskopf über die Haltestabeinrichtung über einen zu reinigenden Boden führen.
- Bei einer Ausführungsform umfasst das mindestens eine Abstützelement einen Pfosten, welcher mit der Basis verbunden ist und von der Basis weg in einen Raum ragt, in welchem die Schmutzfluidtankeinrichtung positioniert ist. Durch den Pfosten lässt sich gewissermaßen der Raum zwischen der Basis und der Aufstellfläche überbrücken.
- Insbesondere ist dann mindestens eines der Folgenden vorgesehen:
- an dem Pfosten sitzt eine Rolle oder ein Gleiter;
- der Pfosten ist bei an der Basis fixierter Schmutzfluidtankeinrichtung in der zugeordneten durchgehenden Ausnehmung der Schmutzfluidtankeinrichtung positioniert.
- Es lässt sich so eine Schmutzfluidtankeinrichtung mit großem Aufnahmevolumen bereitstellen. Insbesondere ist die durchgehende Ausnehmung an einer Oberseite der Schmutzfluidtankeinrichtung und an einer Unterseite der Schmutzfluidtankeinrichtung jeweils offen, wobei bei an der Basis fixierter Schmutzfluidtankeinrichtung die Oberseite der Basis zugewandt ist, und wobei die Unterseite der Oberseite abgewandt ist. Dadurch lässt sich auf einfache Weise die Schmutzfluidtankeinrichtung an der Basis fixieren und von der Basis lösen. Es lässt sich ein fest an dem Reinigungskopf (fest an der Basis) angeordnetes mindestens ein Abstützelement bereitstellen zur Definition der Aufstellfläche.
- Es kann dabei vorgesehen sein, dass die durchgehende Ausnehmung durch eine Wandung der Schmutzfluidtankeinrichtung zwischen der Oberseite und der Unterseite begrenzt ist, wobei die Wandung geschlossen ist oder die durchgehende Ausnehmung zu einer Seite der Schmutzfluidtankeinrichtung hin offen ist. Die Schmutzfluidtankeinrichtung ist gegenüber der durchgehenden Ausnehmung fluiddicht ausgebildet. Dadurch ergibt sich ein minimierter "Volumenverlust" der Schmutzfluidtankeinrichtung aufgrund der durchgehenden Ausnehmung.
- Die Wandung ist dabei quer und insbesondere senkrecht zu der Oberseite und/oder der Unterseite der Schmutzfluidtankeinrichtung orientiert. Dadurch ist der konstruktive Aufwand für die Anordnung des mindestens einen Abstützelements und die durchgehende Ausnehmung minimiert. Bei einer vorteilhaften Ausführungsform sitzt die mindestens eine Reinigungswalzeneinheit an einer Walzenaufnahme einer Welle mit einem ersten Wellenteil, einem Mittelteil und einem zweiten Wellenteil, wobei der Mittelteil zwischen dem ersten Wellenteil und dem zweiten Wellenteil liegt und an dem ersten Wellenteil ein erster Walzenteil der mindestens einen Reinigungswalzeneinheit und an dem zweiten Wellenteil ein zweiter Walzenteil der mindestens einen Reinigungswalzeneinheit angeordnet ist, und dass ein Mittelantrieb vorgesehen ist, welcher auf den Mittelteil wirkt. Dadurch lässt sich die Reinigungswalzeneinheit bis an laterale Ränder des Reinigungskopfs führen. Dies wiederum ermöglicht eine randnahe Reinigung. Grundsätzlich ist es so, dass bei einem Reinigungsvorgang an dem Mittelteil ein Streifen an einem zu reinigenden Boden bleibt. Durch versetztes Überfahren lässt sich auch eine Reinigung an diesem Streifen durchführen.
- Es ist dann ganz besonders vorteilhaft, wenn das mindestens eine Abstützelement bezogen auf eine Längsachse des Reinigungskopfs fluchtend zu dem Mittelteil angeordnet ist. Es wird dann bei der Reinigung eines Bodens das Abstützelement an dem nicht gereinigten Streifen geführt. Dadurch wird das mindestens eine Abstützelement nicht in einen bereits gereinigten Bereich geführt.
- Ganz besonders vorteilhaft ist es, wenn an der Schmutzfluidtankeinrichtung eine Trittlasche angeordnet ist und bei an dem Reinigungskopf fixierter Schmutzfluidtankeinrichtung das mindestens eine Abstützelement bezogen auf eine Längsachse des Reinigungskopfs fluchtend zu der Trittlasche angeordnet ist. Durch die Trittlasche lässt sich durch entsprechende Kraftausübung insbesondere über den Fuß eines Bedieners die Schmutzfluidtankeinrichtung auf einfache Weise von der Basis lösen. Durch die fluchtende Anordnung zu dem mindestens einen Abstützelement lassen sich Kippmomente und dergleichen verhindern.
- Günstig ist es, wenn genau ein Abstützelement vorgesehen ist. Dadurch ist der konstruktive Aufwand gering gehalten. Insbesondere ist die Volumenverkleinerung aufgrund des mindestens einen Abstützelements mit der zugeordneten durchgehenden Ausnehmung für die Schmutzfluidtankeinrichtung minimiert.
- Kippmomente oder dergleichen werden vermieden, wenn das mindestens eine Abstützelement mittig zwischen einer ersten lateralen Seite und einer zweiten lateralen Seite des Reinigungskopfs angeordnet ist.
- Durch diese Lösung lässt sich eine Bodenreinigungsmaschine realisieren, bei der sich die Haltestabeinrichtung über ihr Gewicht an der mindestens einen Reinigungswalzeneinheit abstützt. Es wird dadurch ein großer, insbesondere maximaler Anpressdruck aufgrund des Eigengewichts der Haltestabeinrichtung für den Reinigungskopf an einem zu reinigenden Boden erreicht.
- Durch den entsprechend hohen Anpressdruck ergeben sich verbesserte Reinigungsergebnisse. Es wird die Schmutzablösung von dem zu reinigenden Boden verbessert.
- Weiterhin lässt es sich durch die entsprechende Ausbildung des Schwenkgelenks auf einfache Weise realisieren, dass in jeder Position des Schwenkgelenks der Reinigungskopf, an welchem insbesondere eine Schmutzfluidtankeinrichtung abnehmbar angeordnet ist, in der gleichen Position zu dem zu reinigenden Boden ist. Auch dies verbessert das Reinigungsergebnis.
- Ganz besonders vorteilhaft ist es, wenn das Schwenkgelenk als Orbitalgelenk ausgebildet ist mit einer orbitalen Bahnführung der Haltestabeinrichtung an dem Reinigungskopf. Dadurch lässt sich auf einfache Weise eine Koaxialität zwischen der Schwenkachse des Schwenkgelenks und der Rotationsachse erreichen. Insbesondere lässt es sich dadurch erreichen, dass bei einer Schwenkung der Haltestabeinrichtung zu dem Reinigungskopf, wenn der Reinigungskopf mit der mindestens einen Reinigungswalzeneinheit ordnungsgemäß auf dem zu reinigenden Boden aufgesetzt ist, sich die Reinigungswalzeneinheit an dem Boden aufgrund der Schwenkung dreht.
- Bei einer konstruktiv günstigen Ausführungsform weist das Schwenkgelenk eine Bahnführungseinrichtung auf, welche drehfest an dem Reinigungskopf sitzt und welche einen Kreisbahnabschnitt aufweist mit einem Zentrum, welches auf der Schwenkachse liegt, und das Schwenkgelenk weist eine Gegeneinrichtung auf, welche drehfest an der Haltestabeinrichtung sitzt und welche sich an der Bahnführungseinrichtung abstützt. Es lässt sich so auf einfache Weise ein Orbitalgelenk ausbilden, wobei die Schwenkachse mit der Rotationsachse der mindestens einen Reinigungswalzeneinheit zusammenfällt. Weiterhin ergibt sich ein großer Abstützungsbereich für die Gegeneinrichtung an der Bahnführungseinrichtung. Dadurch lässt sich ein mechanisch stabiles Schwenkgelenk realisieren, welches eine entsprechend hohe Lebensdauer aufweist.
- Günstig ist es, wenn die mindestens eine Reinigungswalzeneinheit im Bereich eines vorderen Endes des Reinigungskopfs angeordnet ist, mit Folgenden:
- der Kreisbahnabschnitt ist bezogen auf eine Längsachse des Reinigungskopfs mit einem Teilbereich hinter der mindestens einen Reinigungswalze angeordnet;
- der Kreisbahnabschnitt ist bezogen auf eine Höhenachse des Reinigungskopfs mit einem Teilbereich oberhalb der mindestens einen Reinigungswalzeneinheit angeordnet.
- Durch diese Anordnung umgreift von zwei Seiten her der Kreisbahnabschnitt gewissermaßen die mindestens eine Reinigungswalzeneinheit. Dadurch lässt sich auf einfache Weise ein Schwenkgelenk und insbesondere Orbitalgelenk realisieren, dessen Schwenkachse mit der Rotationsachse der mindestens einen Reinigungswalzeneinheit zusammenfällt.
- Günstig ist es, wenn die Gegeneinrichtung über mindestens drei Abstützpunkte an der Bahnführungseinrichtung abgestützt ist. Es ergibt sich dadurch eine mechanisch stabile Schwenkgelenkkonstruktion.
- Vorteilhafterweise ist das Schwenkgelenk mittig zwischen einer ersten lateralen Seite und einer beabstandeten zweiten lateralen Seite des Reinigungskopfs angeordnet. Es ergibt sich dadurch eine symmetrische Ausbildung und es werden Kippmomente und dergleichen vermieden.
- Ganz besonders vorteilhaft ist es, wenn bei einer Schwenkung der Haltestabeinrichtung um die Schwenkachse sich die mindestens eine Reinigungswalzeneinheit mitbewegt. Sie rollt dann auf einem zu reinigenden Boden ab, wenn der Reinigungskopf ordnungsgemäß auf dem zu reinigenden Boden über die mindestens eine Reinigungswalzeneinheit abgestützt ist. Diese Bewegung ist dabei der Rotationsbewegung der mindestens einen Reinigungswalzeneinheit um die Rotationsachse überlagert.
- Ganz besonders vorteilhaft ist es, wenn dem Reinigungskopf eine Trittlasche im Bereich eines hinteren Endes des Reinigungskopfs zugeordnet ist, wobei das hintere Ende abgewandt zu einem vorderen Ende ist und die mindestens eine Reinigungswalzeneinheit im Bereich des vorderen Endes angeordnet ist. Über die Trittlasche kann ein Bediener über seinen Fuß auf den Reinigungskopf und insbesondere auf die Schmutzfluidtankeinrichtung zugreifen. Dadurch ergibt sich insbesondere eine verbesserte Ablösemöglichkeit für die Schmutzfluidtankeinrichtung von dem Reinigungskopf. Ein Bediener muss dann beispielsweise die Schmutzfluidtankeinrichtung nicht selber anfassen, um diese von dem Reinigungskopf zu entfernen bzw. den Reinigungskopf mit der Schmutzfluidtankeinrichtung zu verbinden.
- Bei einer vorteilhaften Ausführungsform ist die Trittlasche bezogen auf eine Längsachse des Reinigungskopfs fluchtend zu dem Schwenkgelenk angeordnet und ist insbesondere mittig zwischen einer ersten lateralen Seite und einer zweiten lateralen Seite des Reinigungskopfs angeordnet. Dadurch lassen sich beispielsweise Kippmomente verhindern.
- Es ist günstig, wenn mindestens eines der Folgenden vorgesehen ist:
- die Trittlasche ragt über ein hinteres Ende einer Basis oder eines Gehäuses des Reinigungskopfs hinaus;
- die Trittlasche sitzt an einer Schmutzfluidtankeinrichtung, welche abnehmbar an dem Reinigungskopf angeordnet ist;
- die Trittlasche weist hochgezogene laterale Randwandungen auf.
- Durch das Hinausragen über das hintere Ende kann ein Bediener von seiner Bedienerseite her auf einfache Weise auf die Trittlasche über einen Fuß einwirken. Er kann dann gleichzeitig auf die Trittlasche stehen und beispielsweise auf die Haltestabeinrichtung einwirken.
- Wenn die Trittlasche an der Schmutzfluidtankeinrichtung sitzt, dann kann auf einfache Weise durch Einwirkung auf diese die Schmutzfluidtankeinrichtung gelöst werden. Beispielsweise kann durch Krafteinwirkung des Bedieners an der Trittlasche, wenn der Reinigungskopf mit der Schmutzfluidtankeinrichtung auf einem Boden aufsteht, gewissermaßen die Schmutzfluidtankeinrichtung an dem Boden fixiert werden und durch Anheben des Reinigungskopfs kann eine Lösung der Schmutzfluidtankeinrichtung von dem Reinigungskopf erfolgen.
- Durch hochgezogene laterale Randwandungen an der Trittlasche wird ein Abrutschen eines Bedienerfußes vermieden. Es lassen sich auch scharfe Kanten oder dergleichen vermeiden.
- Ganz besonders vorteilhaft ist es, wenn an dem Reinigungskopf ein Freiraum gebildet ist, in welchem die Haltestabeinrichtung bei einer Verschwenkung um die Schwenkachse beweglich ist, und insbesondere ist eine Trittlasche an dem Freiraum oder in Fortsetzung des Freiraums angeordnet. Es ergibt sich so ein großer Schwenkbereich für die Haltestabeinrichtung an dem Reinigungskopf. Insbesondere lassen sich dadurch kleine Schwenkwinkel erreichen, bei denen die Haltestabeinrichtung nahe an dem zu reinigenden Boden liegt. Dadurch ergibt sich eine gute Unterfahrbarkeit von Möbeln oder dergleichen.
- Bei einem Ausführungsbeispiel ist ein Antriebsmotor für die Reinigungswalzeneinheit vorgesehen, welcher bezogen auf die Schwenkbarkeit der Haltestabeinrichtung um die Schwenkachse drehfest mit der Haltestabeinrichtung verbunden ist. Es ergibt sich dadurch eine konstruktiv einfache Ausführungsform. Bei einer Verschwenkung der Haltestabeinrichtung wird der Antriebsmotor mit verschwenkt. Es lässt sich dadurch ein Antriebsstrang mit dem Antriebsmotor und der Reinigungswalzeneinheit (an einer Walzenaufnahme) realisieren, bei dem keine Gleitkupplung oder dergleichen vorgesehen werden muss.
- Aus dem gleichen Grund ist es günstig, wenn eine Getriebeeinrichtung zur Übertragung eines Drehmoments von einem Antriebsmotor auf die mindestens eine Reinigungswalzeneinheit vorgesehen ist, bei der die Getriebeeinrichtung bezogen auf eine Schwenkbarkeit der Haltestabeinrichtung um die Schwenkachse drehfest mit der Haltestabeinrichtung verbunden ist. Es lässt sich dadurch der gesamte Antriebsstrang aus Antriebsmotor und Getriebeeinrichtung relativ zu dem Reinigungskopf über Verschwenkung der Haltestabeinrichtung an dem Reinigungskopf verschwenken und es ist keine zusätzliche Kupplung notwendig.
- Aus den genannten Gründen ist es dann ebenfalls günstig, wenn eine Walzenaufnahme vorgesehen ist, an welcher die mindestens eine Reinigungswalzeneinheit sitzt, wobei die Walzenaufnahme bezogen auf die Schwenkbarkeit der Haltestabeinrichtung drehfest mit der Haltestabeinrichtung verbunden ist. Der gesamte Antriebsstrang aus Antriebseinrichtung, Getriebeeinrichtung, Antriebsmotor ist drehfest mit der Haltestabeinrichtung verbunden und mit dieser verschwenkbar. Dadurch ergibt sich eine direkte Einwirkung der Gewichtskraft der Haltestabeinrichtung einschließlich Antriebsmotor und Getriebeeinrichtung auf die Reinigungswalzeneinheit zur Bereitstellung einer hohen und insbesondere maximalen Anpresskraft der Reinigungswalzeneinheit an einem zu reinigenden Boden.
- Bei einem Ausführungsbeispiel sitzt die mindestens eine Reinigungswalzeneinheit an einer Walzenaufnahme an einer Welle mit einem ersten Wellenteil, einem Mittelteil und einem zweiten Wellenteil, wobei der Mittelteil zwischen dem ersten Wellenteil und dem zweiten Wellenteil liegt und an dem ersten Wellenteil ein erster Walzenteil der mindestens einen Reinigungswalzeneinheit und an dem zweiten Wellenteil ein zweiter Walzenteil der mindestens einen Reinigungswalzeneinheit angeordnet ist, und es ist ein Mittelantrieb vorgesehen, welcher auf den Mittelteil wirkt, und der Mittelteil ist bezogen auf eine Längsachse des Reinigungskopfs fluchtend zu dem Schwenkgelenk angeordnet. Durch diesen Mittelantrieb lassen sich der erste Walzenteil und der zweite Walzenteil bis zu lateralen Seitenenden des Reinigungskopfs führen. Es lässt sich dadurch eine randnahe Reinigung erreichen. Durch die fluchtende Anordnung des Schwenkgelenks zu dem Mittelteil lassen sich Kippmomente und dergleichen vermeiden.
- Bei einem Ausführungsbeispiel ist es vorgesehen, dass die Haltestabeinrichtung einen ersten Teil und einen zweiten Teil aufweist, wobei der erste Teil an dem Reinigungskopf angelenkt ist und der zweite Teil um eine Drehachse relativ zu dem ersten Teil drehbar ist, wobei insbesondere die Drehachse quer und vorzugsweise senkrecht zu der Schwenkachse des Schwenkgelenks orientiert ist. Dadurch ergeben sich erleichterte Bedienungsmöglichkeiten. Durch die zusätzliche Drehbarkeit ist es beispielsweise für einen Bediener erleichtert, in Ecken oder dergleichen einen Reinigungsvorgang durchzuführen. Er kann den Reinigungskopf auf unterschiedliche Arten relativ zu sich selber aufgrund der Drehbarkeit um die Drehachse positionieren. Die Drehachse ist beispielsweise parallel zu einer Längsachse des ersten Teils oder beispielsweise parallel zu einer Längsachse des zweiten Teils.
- Ganz besonders vorteilhaft ist es, wenn eine Verriegelungseinrichtung vorgesehen ist, durch welche eine Drehbarkeit um die Drehachse verriegelbar ist, insbesondere mit mindestens einem der Folgenden:
- in einer feststellbaren Parkposition der Haltestabeinrichtung bezüglich des Reinigungskopfs wirkt die Verriegelungseinrichtung und ist insbesondere in einer Verriegelungsstellung;
- außerhalb der feststehenden Parkposition ist die Drehbarkeit durch die Verriegelungseinrichtung freigegeben;
- die Verriegelungseinrichtung geht automatisch in eine Verriegelungsstellung, wenn die Parkposition erreicht ist;
- die Verriegelungseinrichtung geht automatisch aus ihrer Verriegelungsstellung bei Aufheben der Parkposition.
- Es lässt sich dadurch insbesondere auf automatische Weise erreichen, dass in der Parkposition die Drehbarkeit gesperrt ist. Dadurch ergibt sich eine "stabile" Parkposition. Es ist dann ebenfalls günstig, wenn die Verriegelungsstellung automatisch beim Eintritt in die Parkposition erreicht wird, und die Verriegelungsstellung automatisch beim Austritt aus der Parkposition erreicht wird. Die feststellbare Parkposition ist eine Ruheposition für die Bodenreinigungsmaschine, insbesondere für einen Nichtbetrieb. Außerhalb dieser Ruheposition ist die Drehbarkeit ermöglicht, um umfangreiche Reinigungsmöglichkeiten zu erreichen.
- Bei einem Ausführungsbeispiel umfasst die Verriegelungseinrichtung einen federgestützten beweglichen Schieber, welcher an dem ersten Teil verschieblich gelagert ist und in einer Verriegelungsstellung einen Formschluss mit dem zweiten Teil bewirkt, insbesondere mit mindestens einem der Folgenden:
- der Schieber weist eine Nase auf, welche sich in der Verriegelungsstellung an dem Reinigungskopf abstützt und den Schieber in der Verriegelungsstellung hält oder in die Verriegelungsstellung bringt;
- der Schieber weist einen Überlastschutz auf;
- der Schieber weist mindestens einen ersten Teil und einen zweiten Teil auf, wobei der zweite Teil auf den zweiten Teil der Haltestabeinrichtung wirkt und wobei der zweite Teil federbeaufschlagt an dem ersten Teil beweglich angeordnet ist.
- Durch den beweglichen Schieber lässt sich die Verriegelungseinrichtung auf einfache Weise realisieren. Durch die Federabstützung lässt es sich auf einfache Weise erreichen, dass automatisch für eine Parkposition die Verriegelungsstellung erreicht wird. Insbesondere ist die Federabstützung derart, dass außerhalb der Parkposition der Schieber in einer solchen Stellung gehalten wird, dass kein Formschluss mit dem zweiten Teil vorliegt. Wenn die Parkposition erreicht wird, wird insbesondere durch entsprechende Abstützung des Schiebers an dem Reinigungskopf dieser entgegen der Kraft der Federeinrichtung so verschoben, dass der Formschluss erreicht wird.
- Bei einer konstruktiv günstigen Ausführungsform weist der Schieber eine Nase auf, wobei dann über die Nase ein Einwirken des Reinigungskopfs insbesondere der Parkposition ermöglicht ist, um den Schieber in die Formschluss-Verriegelungsstellung mit dem zweiten Teil der Haltestabeinrichtung zu schieben bzw. dort zu halten.
- Ganz besonders vorteilhaft ist es, wenn ein Überlastschutz für die Verriegelungseinrichtung vorgesehen ist. Dadurch wird die Beschädigungsgefahr an der Bodenreinigungsmaschine bei großer Kraftbelastung insbesondere in der Parkposition verringert bzw. verhindert. Es ist eine Ausweichmöglichkeit bereitgestellt, um die Beschädigungsgefahr zu verringern.
- Insbesondere ist der Schieber mehrteilig ausgebildet, sodass in der Parkposition, wenn eine Verschiebung des Schiebers als Ganzes nicht möglich ist, sich die Teile des Schiebers relativ zueinander verschieben können, um einen Überlastschutz bereitzustellen und die Beschädigungsgefahr zu verringern. Durch eine Federabstützung des zweiten Teils an dem ersten Teil ist es insbesondere erreicht, dass außerhalb des Überlastfalles der Schieber als Ganzes mit dem ersten Teil und mit dem zweiten Teil beweglich ist, um die Verriegelungsstellung zu erreichen bzw. die Verriegelungsstellung aufheben zu können. Innerhalb der Verriegelungsstellung kann bei großer Kraftbelastung ein Ausweichen an dem Schieber selber durch die mehrteilige Ausbildung ermöglicht werden.
- Bei einem Ausführungsbeispiel weist die Haltestabeinrichtung einen ersten Bereich mit einer ersten Längsachse auf und einen zweiten Bereich mit einer zweiten Längsachse, wobei die erste Längsachse und die zweite Längsachse in einem stumpfen Winkel zueinander orientiert sind, wobei insbesondere der stumpfe Winkel im Bereich zwischen 120° und 170° liegt. Dadurch ergibt sich eine optimierte Anlenkbarkeit der Haltestabeinrichtung an den Reinigungskopf insbesondere bei einem Orbitalgelenk. Es ergibt sich ein hoher Schwenkwinkelbereich.
- Insbesondere ist mindestens eines der Folgenden vorgesehen:
- der zweite Bereich sitzt an dem ersten Bereich;
- der erste Bereich ist oder umfasst einen distalen Bereich der Haltestabeinrichtung;
- die Haltestabeinrichtung ist über den ersten Bereich an den Reinigungskopf angelenkt;
- an dem ersten Bereich ist eine Gegeneinrichtung des Schwenkgelenks angeordnet;
- an dem ersten Bereich ist ein Antriebsmotor für die mindestens eine Reinigungswalzeneinheit angeordnet;
- der erste Bereich weist ein Gehäuse auf;
- an dem ersten Bereich ist ein Batteriehalter angeordnet;
- an dem ersten Bereich ist eine insbesondere abnehmbare Tankeinrichtung für Reinigungsflüssigkeit angeordnet.
- Es ergibt sich durch die erwähnten Merkmale ein entsprechend einfacher konstruktiver Aufbau.
- Aus den gleichen Gründen ist es günstig, wenn mindestens eines der Folgenden vorgesehen ist:
- der zweite Bereich ist oder umfasst einen proximalen Bereich der Haltestabeinrichtung;
- an dem zweiten Bereich ist ein Handgriff angeordnet;
- an dem zweiten Bereich ist eine insbesondere abnehmbare Tankeinrichtung für Reinigungsflüssigkeit angeordnet;
- an dem zweiten Bereich ist ein Batteriehalter angeordnet;
- an dem zweiten Bereich oder an einem Handgriff, welcher an dem zweiten Bereich sitzt, ist ein Bedienungspaneel angeordnet;
- der zweite Bereich weist eine gerade Erstreckung in der zweiten Längsachse auf.
- Es ergibt sich dadurch auch eine einfache Bedienbarkeit der Bodenreinigungsmaschine.
- Ganz besonders vorteilhaft ist es, wenn die Haltestabeinrichtung über das Schwenkgelenk einen freien Schwenkwinkelbereich zu dem Reinigungskopf mit einem Schwenkwinkel zwischen einer Längsachse der Haltestabeinrichtung und einer Aufstellfläche des Reinigungskopfs auf einen zu reinigenden Boden aufweist, wobei der Schwenkwinkel im Bereich zwischen einer unteren Grenze und einer oberen Grenze liegt, insbesondere mit mindestens einem der Folgenden:
- die untere Grenze liegt bei 0° oder größer 0°;
- die untere Grenze ist kleiner als 50° und insbesondere kleiner als 40° und insbesondere kleiner als 30° und vorzugsweise kleiner als 20°;
- die obere Grenze liegt im Bereich zwischen 80° und 120° und insbesondere bei ca. 90°;
- an der oberen Grenze weist die Haltestabeinrichtung eine feststellbare Parkposition bezüglich dem Reinigungskopf auf.
- Es ergibt sich ein entsprechend hoher Schwenkwinkel. Durch eine kleine untere Grenze ergibt sich eine gute Unterfahrbarkeit beispielsweise unter Möbel. Durch eine feststellbare Parkposition lässt sich eine stabile Lage der Haltestabeinrichtung zu dem Reinigungskopf erreichen und insgesamt eine stabile Lage der Bodenreinigungsmaschine zum Abstellen oder beispielsweise auch für einen Säuberungsvorgang der mindestens einen Reinigungswalzeneinheit erreichen.
- Günstig ist es, wenn eine Verriegelungseinrichtung vorgesehen ist, welche die Haltestabeinrichtung an der oberen Grenze mit dem Reinigungskopf so verriegelt, dass eine Schwenkbarkeit der Haltestabeinrichtung zu dem Reinigungskopf gesperrt ist. Dadurch lässt sich die Haltestabeinrichtung mit dem Reinigungskopf arretieren. Es ergibt sich eine Lagerungspositionierung für die Bodenreinigungsmaschine. Es kann dadurch auch auf einfache Weise an einer entsprechenden Bodenstation ein automatisierter Reinigungsvorgang der mindestens einen Reinigungswalzeneinheit oder auch von anderen Teilen der Bodenreinigungsmaschine durchgeführt werden. Ein "Herabfallen" der Haltestabeinrichtung wird verhindert.
- Günstig ist es, wenn eine Weiterverschwenkung der Haltestabeinrichtung, wenn diese an der oberen Grenze ist und mit dem Reinigungskopf verriegelt ist, und wenn der Reinigungskopf ordnungsgemäß auf einen zu reinigenden Boden aufgestellt ist, bei Vergrößerung des Schwenkwinkels ohne weiteren Bedienereingriff zu einer Verschwenkung des Reinigungskopfs zu dem zu reinigenden Boden führt. Es lässt sich dadurch auf einfache Weise eine Schmutzfluidtankeinrichtung von dem Reinigungskopf lösen, insbesondere wenn diese mit einer Trittlasche versehen ist. Für einen entsprechenden Abnehmvorgang der Schmutzfluidtankeinrichtung muss dann insbesondere ein Bediener die Schmutzfluidtankeinrichtung nicht anfassen. Ferner kann er sie auf einfache Weise an dem zu reinigenden Boden stabilisieren (durch entsprechende Kraftaufwendung insbesondere über einen Fuß auf eine Trittlasche). Dadurch wiederum wird eine Bewegung der Schmutzfluidtankeinrichtung bei der Ablösung der Schmutzfluidtankeinrichtung von dem Reinigungskopf minimiert und ein Schwanken von Flüssigkeit in der Schmutzfluidtankeinrichtung wird minimiert.
- Bei einem Ausführungsbeispiel umfasst die Verriegelungseinrichtung mindestens einen federbeaufschlagten Stift und eine zugeordnete Eintauchöffnung für den Stift, wobei (i) der mindestens eine Stift drehfest an der Haltestabeinrichtung angeordnet ist und die zugeordnete Eintauchöffnung drehfest an dem Reinigungskopf angeordnet ist, oder (ii) der mindestens eine Stift drehfest an dem Reinigungskopf angeordnet ist und die zugeordnete Eintauchöffnung drehfest an der Haltestabeinrichtung angeordnet ist. Durch eine Stift-Eintauchöffnung lässt sich auf konstruktiv einfache Weise eine Verriegelungseinrichtung realisieren. Die Verriegelung lässt sich durch einen Bediener auf einfache Weise herstellen und auch aufheben. Insbesondere kann die Herstellung der Verriegelung durch Erreichen einer bestimmten Schwenkposition (insbesondere oberen Grenze) automatisch erreicht werden. Weiterhin lässt sich auf einfache Weise die Verriegelungsposition (Sperrstellung) durch Kraftausübung an der Haltestabeinrichtung aufheben.
- Günstig ist es, wenn mindestens eines der Folgenden vorgesehen ist:
- der Eintauchöffnung ist außerhalb der Eintauchöffnung eine erste schiefe Ebene zugeordnet, welche bei Vergrößerung des Schwenkwinkels den zugeordneten Stift in die Eintauchöffnung führt, wobei die erste schiefe Ebene eine Verschiebung des Stifts entgegen einer Kraftwirkung der Federbeaufschlagung bewirkt;
- der mindestens eine Stift weist eine an die erste schiefe Ebene angepasste erste Anlagefläche auf;
- die Eintauchöffnung ist durch eine Wandung begrenzt, welche eine zweite schiefe Ebene aufweist und über welche der zugeordnete Stift bei Verkleinerung des Schwenkwinkels aus der Eintauchöffnung herausbewegt ist, wobei die zweite schiefe Ebene eine Verschiebung des Stifts entgegen einer Kraftwirkung der Federbeaufschlagung bewirkt;
- der mindestens eine Stift weist eine an die zweite schiefe Ebene angepasste zweite Anlagefläche auf.
- Der Stift ist insbesondere verschieblich angeordnet und federbeaufschlagt. Über Führung der ersten schiefen Ebene lässt sich entgegen der Wirkung der Federkraft eine Positionierung des Stifts erreichen, welcher ein Eintauchen in die Eintauchöffnung ermöglicht. Durch die Federbeaufschlagung wird der Stift in die Eintauchöffnung gedrückt, sobald diese erreicht ist. Dieser Verriegelungsvorgang lässt sich allein über eine Schwenkbewegung an der Haltestabeinrichtung durchführen und dadurch automatisiert durchführen. Es lässt sich direkt eine entsprechende Sperrstellung mit in die Eintauchöffnung eingetauchtem Stift durch Schwenken insbesondere zu einer oberen Grenze des Schwenkwinkelbereichs erreichen.
- Durch die erste Anlagefläche, welche an die erste schiefe Ebene angepasst ist, ergibt sich entsprechend eine einfache automatisierte Erreichbarkeit der entsprechenden Sperrstellung.
- Durch die zweite schiefe Ebene kann ein entsprechender Kraftaufwand eingestellt werden, der notwendig ist, um den Stift wieder aus der Eintauchöffnung herauszuführen. Insbesondere lässt sich der Kraftaufwand durch Ausübung eines Drehmoments auf die Haltestabeinrichtung erreichen. Es lässt sich dadurch ein automatisiertes Aufheben der Sperrstellung erreichen. Ein Bediener muss dann nur die Haltestabeinrichtung zu dem Reinigungskopf verschwenken, ohne einen weiteren Eingriff zum Lösen der Arretierung durchzuführen.
- Durch die erste schiefe Ebene und die zweite schiefe Ebene lässt es sich auch auf einfache Weise einstellen, welcher Kraftaufwand zum Erreichen der Sperrstellung (Stift in der Eintauchöffnung eingetaucht) oder zum Aufheben der Sperrstellung (Austauchen des Stifts aus der Eintauchöffnung) notwendig ist. Insbesondere ist eine solche Dimensionierung vorgesehen, dass der Kraftaufwand zum Aufheben der Sperrstellung größer ist als zum Erreichen der Sperrstellung.
- Günstig ist es, wenn an dem Reinigungskopf eine abnehmbare Schmutzfluidtankeinrichtung angeordnet ist mit mindestens einem der Folgenden:
- an der Schmutzfluidtankeinrichtung ist eine Trittlasche angeordnet;
- an dem Reinigungskopf ist mindestens ein Abstreifelement angeordnet, welches auf die mindestens eine Reinigungswalzeneinheit wirkt und zum Abstreifen von Schmutzfluid von der mindestens einen Reinigungswalzeneinheit dient;
- das mindestens eine Abstreifelement taucht in ein Wirkmaterial der mindestens einen Reinigungswalzeneinheit ein;
- Schmutzfluid wird direkt von der mindestens einen Reinigungswalzeneinheit ohne Betrieb einer Absaugeinrichtung in die Schmutzfluidtankeinrichtung befördert.
- Durch die Anordnung der Trittlasche an der Schmutzfluidtankeinrichtung lässt sich auf einfache Weise die Schmutzfluidtankeinrichtung von dem Reinigungskopf lösen. Ferner wird die Gefahr des Umfallens der Bodenreinigungsmaschine beim Abstellen verringert.
- Durch das mindestens eine Abstreifelement lässt sich auf einfache Weise Schmutzfluid ablösen und insbesondere absaugefrei in die Schmutzfluidtankeinrichtung einkoppeln.
- Ferner ist es günstig, wenn mindestens eines der Folgenden vorgesehen ist:
- die Haltestabeinrichtung ist für einen stehenden Bediener ausgebildet, welcher auf dem zu reinigenden Boden steht, wobei der Reinigungskopf über eine Aufstellfläche auf den zu reinigenden Boden aufgesetzt ist und die Bodenreinigungsmaschine ist über die Haltestabeinrichtung über den zu reinigenden Boden führbar;
- die mindestens eine Reinigungswalzeneinheit ist durch einen Antriebsmotor motorisch angetrieben;
- der Reinigungskopf weist ein Gehäuse auf, in welchem mindestens teilweise die mindestens eine Reinigungswalzeneinheit angeordnet ist;
- die mindestens eine Reinigungswalzeneinheit liegt mit äußeren Enden jeweils an einer lateralen ersten Seite und einer lateralen zweiten Seite des Reinigungskopfs.
- Es ergibt sich dadurch eine einfache Bedienbarkeit mit optimalem Reinigungsergebnis insbesondere an Hartböden. Ein stehender Bediener kann den Reinigungsvorgang durchführen. Es ergibt sich eine randnahe Reinigbarkeit von Bodenflächen.
- Es ist ferner günstig, wenn mindestens eines der Folgenden vorgesehen ist:
- an dem Reinigungskopf ist (i) mindestens ein Abstreifelement für die mindestens eine Reinigungswalzeneinheit angeordnet;
- an dem Reinigungskopf ist (ii) mindestens ein Kammelement angeordnet, welches auf die mindestens eine Reinigungswalzeneinheit wirkt;
- dem Reinigungskopf (iii) mindestens ein Kehrelement zugeordnet, welches der mindestens einen Reinigungswalzeneinheit Kehrgut zuführt, wobei das mindestens eine Kehrelement insbesondere an einer Schmutzfluidtankeinrichtung angeordnet ist,
- Dies lässt sich insbesondere durch eine Federbeaufschlagung des mindestens einen Abstreifelements und des mindestens einen Kammelements erreichen. Bezüglich des Kehrelements lässt sich dieses auf einfache Weise erreichen, wenn dieses an der Schmutzfluidtankeinrichtung angeordnet ist und die Schmutzfluidtankeinrichtung beweglich und insbesondere schwimmend an dem Reinigungskopf sitzt.
- Es ergibt sich ein optimiertes Reinigungsergebnis. Auch wenn ein Durchmesser der mindestens einen Reinigungswalzeneinheit variiert, beispielsweise durch Verschleiß oder Fertigungstoleranzen, wird dadurch das Reinigungsergebnis nicht verschlechtert.
- Vorteilhaft ist es, wenn der Reinigungskopf eine Aufstellfläche für einen zu reinigenden Boden aufweist, welcher insbesondere eine ebene Fläche ist, und dem Reinigungskopf eine Horizontalebene parallel zu der Aufstellfläche zugeordnet ist, und bei ordnungsgemäßem Betrieb der Bodenreinigungsmaschine die Horizontalebene des Reinigungskopfs stets in der gleichen Position zu der Aufstellfläche unabhängig von einer Schwenkposition der Haltestabeinrichtung zu dem Reinigungskopf ist.
- Dadurch ergibt sich unabhängig von der Schwenkposition der Haltestabeinrichtung immer das gleiche gute Reinigungsergebnis.
- Ferner ist es günstig, wenn mindestens einer der folgenden Operationsmodi vorgesehen ist:
- ein trockener Kehrbetrieb ohne Beaufschlagung des zu reinigenden Bodens oder der mindestens einen Reinigungswalzeneinheit mit Reinigungsflüssigkeit;
- ein Nasswischbetrieb mit Beaufschlagung des zu reinigenden Bodens und/oder der mindestens einen Reinigungswalzeneinheit mit Reinigungsflüssigkeit;
- ein Kehrbetrieb und ein Nasswischbetrieb, wobei insbesondere über ein Kehrelement Grobschmutz der mindestens einen Reinigungswalzeneinheit zugeführt wird und über die mindestens eine Reinigungswalzeneinheit in eine Schmutzfluidtankeinrichtung gefördert wird und über mindestens ein Abstreifelement Schmutzfluid von der mindestens einen Reinigungswalzeneinheit abgestreift und von dort in die Schmutzfluidtankeinrichtung befördert wird.
- Es lassen sich so optimierte Reinigungsergebnisse realisieren. Insbesondere sind die Möglichkeiten des trocknen Kehrbetriebs, des Nasswischbetriebs und der Kombination von Kehrbetrieb und Nasswischbetrieb an einem Gerät realisierbar und durch einen Bediener entsprechend einstellbar. Gegebenenfalls kann durch Austausch der mindestens einen Reinigungswalzeneinheit eine Anpassung an den jeweiligen Operationsmodus durchgeführt werden.
- Die nachfolgende Beschreibung bevorzugter Ausführungsformen dient im Zusammenhang mit den Zeichnungen der näheren Erläuterung der Erfindung. Es zeigen:
- Figur 1
- eine seitliche Ansicht eines Ausführungsbeispiels einer Flächenreinigungsmaschine (Bodenreinigungsmaschine), welche auf einem zu reinigenden Boden aufsteht;
- Figur 2
- eine perspektivische Darstellung der Bodenreinigungsmaschine gemäß
Figur 1 ; - Figur 3
- eine schematische Teildarstellung eines Reinigungskopfs der Bodenreinigungsmaschine gemäß
Figur 1 in Schnittdarstellung; - Figur 4
- eine perspektivische Teildarstellung eines Ausführungsbeispiels einer erfindungsgemäßen Bodenreinigungsmaschine im Bereich eines Reinigungskopfs;
- Figur 5
- der Reinigungskopf gemäß
Figur 4 in einer weiteren perspektivischen Ansicht; - Figur 6
- der Reinigungskopf gemäß
Figur 4 mit abgenommener Schmutzfluidtankeinrichtung; - Figur 7
- eine Schnittansicht des Reinigungskopfs gemäß
Figur 4 ; - Figur 8
- eine Schnittansicht längs der Linie 8-8 gemäß
Figur 7 ; - Figur 9
- die gleiche Ansicht wie
Figur 5 , wobei Verriegelungsstellen bzw. Verrastungsstellen für eine Schmutzfluidtankeinrichtung mit dem Reinigungskopf und für eine Haltestabeinrichtung mit dem Reinigungskopf gezeigt sind; - Figur 10
- eine seitliche Schnittansicht des Reinigungskopfs gemäß
Figur 9 im Bereich einer Verriegelungsstelle für die Haltestabeinrichtung mit dem Reinigungskopf außerhalb einer Verriegelungsstellung; - Figur 11
- eine Schnittansicht gemäß
Figur 9 einer Verriegelungsstelle der Schmutzfluidtankeinrichtung mit dem Reinigungskopf, wobei die Schmutzfluidtankeinrichtung an dem Reinigungskopf fixiert ist; - Figur 12
- die gleiche Ansicht wie
Figur 10 , wobei die Haltestabeinrichtung mit dem Reinigungskopf verriegelt ist; - Figur 13
- die gleiche Ansicht wie
Figur 11 bei der Abnahme der Schmutzfluidtankeinrichtung (Auflösung der Verriegelungsstellung); - Figur 14
- eine Variante eines Ausführungsbeispiels eines Stifts mit konischer Spitze;
- Figur 15
- eine Ansicht des Reinigungskopfs außerhalb einer Verriegelungsstellung für eine Drehbarkeit der Haltestabeinrichtung zu dem Reinigungskopf mit abgenommener Verkleidung;
- Figur 16
- eine vergrößerte Darstellung einer Verriegelungseinrichtung gemäß
Figur 15 ; - Figur 17
- die gleiche Ansicht wie
Figur 15 in einer Verriegelungsstellung der Drehbarkeit der Haltestabeinrichtung zu dem Reinigungskopf; - Figur 18
- eine vergrößerte Darstellung der Verriegelungseinrichtung in der Stellung gemäß
Figur 17 ; - Figur 19
- ein Ausführungsbeispiel einer erfindungsgemäßen Bodenreinigungsmaschine mit unterschiedlichen Stellungen der Haltestabeinrichtung zu dem Reinigungskopf, wobei gezeigt ist:
- in Figur 19(a)
- eine bestimmte Schwenkstellung (Arbeitsstellung) der Haltestabeinrichtung zu dem Reinigungskopf;
- in Figur 19(b)
- eine Parkposition der Haltestabeinrichtung zu dem Reinigungskopf;
- in Figur 19(c)
- angedeutet eine Bewegung zur Lösung einer Schmutzfluidtankeinrichtung von dem Reinigungskopf;
- in Figur 19(d)
- ein Hochheben des Reinigungskopfs von der Schmutzfluidtankeinrichtung zur Abnahme von dieser;
- in Figur 19(e)
- schematisch ein Aufsetzen des Reinigungskopfs auf die Schmutzfluidtankeinrichtung zu deren Fixierung;
- Figur 20
- eine Schnittansicht des Reinigungskopfs im Bereich einer Reinigungswalzeneinheit;
- Figur 21
- eine Schnittansicht der Reinigungswalzeneinheit im Bereich A gemäß
Figur 25 ; - Figur 22
- eine ähnliche Schnittansicht wie
Figur 21 im Bereich B gemäßFigur 25 ; - Figur 23
- eine Schnittansicht der Bodenreinigungsmaschine gemäß
Figur 4 in Teildarstellung, wobei die Schwenkposition der Haltestabeinrichtung tiefer ist als inFigur 4 ; - Figur 24
- eine Unteransicht des Reinigungskopfs bei der Bodenreinigungsmaschine gemäß
Figur 4 ; - Figur 25(a)
- schematisch den Verlauf eines Ausführungsbeispiels eines gekrümmten Abstreifelements an einer Reinigungswalzeneinheit mit erstem und zweitem Walzenteil;
- Figur 25(b)
- schematisch den Verlauf eines Ausführungsbeispiels eines gekrümmten Abstreifelements an einem Walzenteil;
- Figur 26
- schematisch den Verlauf eines weiteren Ausführungsbeispiels eines gekrümmten Abstreifelements an einer Reinigungswalzeneinheit mit erstem und zweitem Walzenteil oder an einem Walzenteil;
- Figur 27
- schematisch den Verlauf eines weiteren Ausführungsbeispiels eines gekrümmten Abstreifelements an einer Reinigungswalzeneinheit mit erstem und zweitem Walzenteil oder an einem Walzenteil;
- Figur 28
- eine perspektivische Darstellung eines Ausführungsbeispiels einer Kombination aus Abstreifelement und Haarkamm gemäß
Figur 20 ; - Figur 29
- die Kombination aus
Figur 28 in der Richtung X gemäßFigur 28 ; und - Figur 30
- eine Unteransicht der Kombination gemäß
Figur 28 in der Richtung Y gemäßFigur 28 . - Ein Ausführungsbeispiel einer erfindungsgemäßen Flächenreinigungsmaschine ist eine Bodenreinigungsmaschine 10. Der grundsätzliche Aufbau der Bodenreinigungsmaschine 10 und ihre grundsätzliche Funktionsweise wird anhand der
Figuren 1 bis 3 erläutert. - Mit der Bodenreinigungsmaschine 10 lassen sich insbesondere Hartböden reinigen.
- Die Bodenreinigungsmaschine 10 umfasst einen Reinigungskopf 12. Bei dem Ausführungsbeispiel einer Bodenreinigungsmaschine ist der Reinigungskopf 12 ein Bodenkopf.
- Der Reinigungskopf 12 ist für einen ordnungsgemäßen Reinigungsbetrieb mit einer Aufstellfläche 14 auf einen zu reinigenden Boden 16 aufgesetzt.
- Die Aufstellfläche 14 ist insbesondere eine ebene Fläche.
- An dem Reinigungskopf 12 ist (mindestens) eine Reinigungswalzeneinheit 18 angeordnet. Bei dem gezeigten Ausführungsbeispiel ist genau eine Reinigungswalzeneinheit 18 vorgesehen.
- Die Reinigungswalzeneinheit 18 kann eine einteilige Reinigungswalze oder eine mehrteilige Reinigungswalze, wie untenstehend noch näher erläutert wird, umfassen.
- Der Reinigungskopf 12 hat ein vorderes Ende 20 und ein dem vorderen Ende abgewandtes hinteres Ende 22. Eine Längsachse 24 des Reinigungskopfs 12 erstreckt sich zwischen dem vorderen Ende 20 und dem hinteren Ende 22.
- Der Reinigungskopf 12 hat eine erste laterale Seite 26 und eine gegenüberliegende zweite laterale Seite 28. Eine Abstandsrichtung zwischen der ersten laterale Seite 26 und der zweiten lateralen Seite 28 liegt quer und insbesondere senkrecht zu der Längsachse 24.
- Die Reinigungswalzeneinheit 18 ist im Bereich des vorderen Endes 20 des Reinigungskopfs 12 angeordnet. Bei einem ordnungsgemäßen Betrieb der Bodenreinigungsmaschine 10 steht ein Bediener hinter dem hinteren Ende 22 des Reinigungskopfs 12 auf dem zu reinigenden Boden 16 auf.
- Die Aufstellfläche 14 ist über die Reinigungswalzeneinheit 18 und mindestens ein Aufstellelement (in den
Figuren 1 bis 3 nicht gezeigt) definiert. Der Reinigungskopf 12 und damit auch die Bodenreinigungsmaschine 10 stützt sich über die Reinigungswalzeneinheit 18 und das mindestens eine Aufstellelement auf dem zu reinigenden Boden 16 ab. - Der Reinigungskopf 12 weist eine Basis 30 auf. Diese Basis 30 ist ein Grundkörper des Reinigungskopfs 12.
- An dem Reinigungskopf 12 sitzt eine abnehmbare Schmutzfluidtankeinrichtung 32. Die Schmutzfluidtankeinrichtung 32 nimmt Schmutzfluid auf. Unter Schmutzfluid wird hier ein strömbares Fluid verstanden, welches nass oder trocken sein kann. Das Schmutzfluid kann beispielsweise Reinigungsflüssigkeit mit Schmutzpartikeln oder nur Staubpartikel umfassen.
- Grundsätzlich kann die Schmutzfluidtankeinrichtung 32 mehrere getrennte Einzelteile umfassen, welche einzeln an der Basis 30 fixierbar sind und von dieser abnehmbar sind.
- Bei einer bevorzugten Ausführungsform umfasst die Schmutzfluidtankeinrichtung 32 eine Einheit, welche eine oder mehrere getrennte Kammern für Schmutzfluid aufweist.
- An der Schmutzfluidtankeinrichtung 32 sitzt eine Trittlasche 34, welche nach hinten hinausragt. Diese dient zur erleichterten Abnehmbarkeit der Schmutzfluidtankeinrichtung 32 von dem Reinigungskopf 12, wie untenstehend noch näher erläutert wird.
- An den Reinigungskopf 12 ist eine Haltestabeinrichtung 36 über ein Schwenkgelenk schwenkbar angelenkt. Die Haltestabeinrichtung 36 ist dabei so ausgebildet, dass ein stehender Bediener die Bodenreinigungsmaschine 10 halten und über den zu reinigenden Boden 16 führen kann.
- Proximal ist an der Haltestabeinrichtung 36 ein Handgriff 38 angeordnet. Bei dem gezeigten Ausführungsbeispiel ist der Handgriff 38 als geschlossener Bügelgriff ausgebildet. Auch andere Ausgestaltungen wie beispielsweise als nicht geschlossener Bügelgriff und dergleichen sind möglich.
- Es ist insbesondere vorgesehen, dass an dem Handgriff 38 oder dass an der Haltestabeinrichtung 36 in der Nähe zu dem Handgriff 38 Bedienelemente wie ein Ein-/Aus-Schalter und weitere Bedienelemente beispielsweise zur Steuerung angeordnet sind.
- Distal ist die Haltestabeinrichtung 36 über das Schwenkgelenk an der Basis 30 angelenkt.
- Eine Schwenkachse 40 (
Figur 2 ) des Schwenkgelenks der Anlenkung der Haltestabeinrichtung 36 an den Reinigungskopf 12 ist parallel zu der Aufstellfläche 14. Die Schwenkachse 40 liegt quer und insbesondere senkrecht zu der Längsachse 24. - Die Haltestabeinrichtung 36 weist eine (zweite) Längsachse 42 auf, entlang welcher sich die Haltestabeinrichtung 36 bis zu dem Handgriff 38 erstreckt. Die Schwenkachse 40 liegt quer und insbesondere senkrecht zu dieser zweiten Längsachse 42 der Haltestabeinrichtung 36.
- Es kann vorgesehen sein, dass die Haltestabeinrichtung 36 bezüglich der Beweglichkeit zu dem Reinigungskopf 12 eine weitere Schwenkbarkeit aufweist, wobei die entsprechende Drehachse 41 quer zu der Schwenkachse 40 orientiert ist. Diese Drehbarkeit ist in
Figur 1 durch den Pfeil mit dem Bezugszeichen 44 angedeutet. Die entsprechende Drehachse 41 dieser Drehbarkeit 44 liegt beispielsweise parallel bzw. koaxial zu einer ersten Längsachse 80 der Haltestabeinrichtung 36 (siehe unten). Insbesondere ist es vorgesehen, dass diese Drehbarkeit 44 durch eine entsprechende Ausbildung der Haltestabeinrichtung 36 mit einem ersten Teil 278 und einem zu dem ersten Teil 278 drehbaren zweiten Teil 280 gebildet ist. Dies wird untenstehend insbesondere anhand derFiguren 15 bis 18 noch näher erläutert. - Die Bodenreinigungsmaschine 10 umfasst einen Antriebsmotor (in den
Figuren 1 bis 3 nicht gezeigt), durch welchen die Reinigungswalzeneinheit 18 rotatorisch um eine Rotationsachse 46 angetrieben ist. Die Reinigungswalzeneinheit 18 weist eine einzige Rotationsachse 46 auf, auch wenn diese eine mehrteilige Reinigungswalze umfasst. Die Rotationsachse 46 liegt parallel zu der Aufstellfläche 14. Sie ist senkrecht zu der Längsachse 24 orientiert. Sie ist parallel zu der Schwenkachse 40. - Bei einem Ausführungsbeispiel, welches untenstehend noch näher erläutert wird, sind die Schwenkachse 40 der Schwenkbarkeit der Haltestabeinrichtung 36 an dem Reinigungskopf 12 und die Rotationsachse 46 koaxial zueinander.
- Der Antriebsmotor ist an dem Reinigungskopf 12 angeordnet, oder an der Haltestabeinrichtung 36 angeordnet, oder an einem Übergangsbereich zwischen der Haltestabeinrichtung 36 und dem Reinigungskopf 12 angeordnet. Er wirkt auf die Reinigungswalzeneinheit 18 und stellt ein entsprechendes Drehmoment für einen Drehantrieb der Reinigungswalzeneinheit bereit.
- Die Bodenreinigungsmaschine 10 kann netzbetrieben sein oder batteriebetrieben sein.
- Bei einem Ausführungsbeispiel ist ein Batteriehalter 48 vorgesehen, welcher eine oder mehrere Batterien und insbesondere wiederaufladbare Batterien aufnimmt. Die Batterien können dabei fest an der Bodenreinigungsmaschine 10 angeordnet sein, oder abnehmbar von dieser sein.
- Bei dem gezeigten Ausführungsbeispiel gemäß den
Figuren 1 bis 3 ist der Batteriehalter 48 an der Haltestabeinrichtung 36 angeordnet. Grundsätzlich ist aber auch eine Anordnung an dem Reinigungskopf 12 möglich. - Die Bodenreinigungsmaschine 10 ist insbesondere zur Nassreinigung von Hartböden ausgebildet. Es ist eine Tankeinrichtung 50 für Reinigungsflüssigkeit vorgesehen. Die Reinigungsflüssigkeit ist insbesondere Frischwasser, gegebenenfalls mit einem Reinigungsmittelzusatz. Über Reinigungsflüssigkeit aus der Tankeinrichtung 50 lässt sich die Reinigungswalzeneinheit 18 direkt befeuchten und/oder es lässt sich der zu reinigende Boden 16 befeuchten. Es lässt sich dadurch verbessert Schmutz ablösen, und das entsprechende Schmutzfluid wird von der Reinigungswalzeneinheit 18 aufgenommen und an die Schmutzfluidtankeinrichtung 32 abgegeben.
- Bei dem gezeigten Ausführungsbeispiel ist die Tankeinrichtung 50 an der Haltestabeinrichtung 36 angeordnet. Es ist eine entsprechende Zuführungseinrichtung für Reinigungsflüssigkeit vorgesehen, welche von der Tankeinrichtung 50 zu dem Reinigungskopf 12 führt, um entsprechend die Reinigungswalzeneinheit 18 und/oder den zu reinigenden Boden 16 mit Reinigungsflüssigkeit befeuchten zu können.
- In
Figur 3 ist der grundsätzliche funktionelle Aufbau des Reinigungskopfs 12 gezeigt und es wird die grundsätzliche Funktionsweise anhandFigur 3 erläutert. Bei einem Reinigungsbetrieb ist der Reinigungskopf 12 mit seiner Aufstellfläche 14 auf dem zu reinigenden Boden 16 aufgesetzt (inFigur 3 ist das mindestens eine weitere Aufstellelement nicht gezeigt). Die Reinigungswalzeneinheit 18 wirkt auf den zu reinigenden Boden und rotiert in einer Rotationsrichtung 52. - An der Basis 30 des Reinigungskopfs 12 sitzt die Schmutzfluidtankeinrichtung 32.
- An dem Reinigungskopf 12 ist eine Mündungseinrichtung 54 angeordnet, welche eine Mündungsöffnung 56 aufweist. Diese Mündungsöffnung 56 steht in fluidwirksamer Verbindung mit der Schmutzfluidtankeinrichtung 32 oder ist selber eine Mündungsöffnung an der Schmutzfluidtankeinrichtung 32. Bei der Rotation der Reinigungswalzeneinheit 18 wird diese an der Mündungsöffnung 56 vorbei gedreht.
- Die Schmutzfluidtankeinrichtung 32 weist einen Boden 58 auf. Dieser Boden 58 ist bei ordnungsgemäßem Betrieb der Bodenreinigungsmaschine 10 dem zu reinigenden Boden 16 zugewandt. An dem Boden 58 sitzt der Reinigungswalzeneinheit 18 zugewandt eine Wandung 60, welche bis zu der Mündungsöffnung 56 führt. Die Wandung 60 ist an die Zylinderform der entsprechenden Reinigungswalze der Reinigungswalzeneinheit 18 angepasst.
- Der Reinigungskopf 12 weist ein Kehrelement 62 auf, welches zur Grobschmutzzuführung zu der Reinigungswalzeneinheit 18 dient. Dieser Grobschmutz ist in
Figur 3 durch Doppelpfeile 64 angedeutet. Der Grobschmutz 64, welcher über das Kehrelement 62 der Reinigungswalzeneinheit 18 bereitgestellt wird, kann durch die Reinigungswalzeneinheit 18 mitgenommen werden und über die Mündungsöffnung 56 in die Schmutzfluidtankeinrichtung 32 geworfen werden. - Das Kehrelement 62 ist an der Basis 30 angeordnet oder, wie in
Figur 3 gezeigt, an der Schmutzfluidtankeinrichtung 32 angeordnet. - Über eine Zuführungseinrichtung 66 für Reinigungsflüssigkeit wird im Betrieb der Bodenreinigungsmaschine 10 die Reinigungswalzeneinheit 18 mit Reinigungsflüssigkeit befeuchtet. Diese Befeuchtung ist in
Figur 3 durch die gewellten Pfeile mit dem Bezugszeichen 68 angedeutet. - Die Befeuchtung ist dabei bezogen auf die Rotationsrichtung 52 der Mündungsöffnung 56 nachgeordnet. Ein Bereich der Reinigungswalzeneinheit 18, welcher auf dem zu reinigenden Boden 16 aufsitzt, kommt dann bei Rotation in der Rotationsrichtung 52 zuerst an der Mündungsöffnung 56 und dann an dem entsprechenden Bereich mit der Befeuchtung 68 vorbei.
- Es ist (mindestens) ein Abstreifelement 70 vorgesehen, welches an der Basis 30 angeordnet ist und zwischen der Mündungsöffnung 56 und dem Bereich der Befeuchtung 68 positioniert ist.
- Das Abstreifelement 70 ist insbesondere beweglich an der Basis 30 positioniert. Bei dem gezeigten Ausführungsbeispiel sitzt das Abstreifelement 70 an einem Halter 72, welcher schwenkbar an der Basis 30 angelenkt ist. Dieser Halter 72 ist federbeaufschlagt (in
Figur 3 nicht gezeigt). Die Federbeaufschlagung drückt das Abstreifelement 70 gegen die Reinigungswalzeneinheit 18. - Die Reinigungswalzeneinheit 18 weist bezüglich ihrer Reinigungswalzen einen Besatz auf, welcher an einem entsprechenden Besatzhalter angeordnet ist. Der Besatz ist beispielsweise ein textiles Material. Es kann sich aber auch grundsätzlich um einen Borstenbesatz handeln.
- Das Abstreifelement 70 ist so angeordnet, dass es den Besatz berührt und vorzugsweise in den Besatz eintaucht. Die Federbeaufschlagung des beweglichen Halters 72 sorgt entsprechend für ein Andrücken bzw. Eindrücken.
- Das Abstreifelement 70 bildet eine Mündungswandung der Mündungseinrichtung 54 für die Mündungsöffnung 56. Insbesondere trennt das Abstreifelement 70 den Bereich der Befeuchtung 68 von der Mündungsöffnung 56.
- Das Abstreifelement 70 wirkt so auf die Reinigungswalzeneinheit 18 und so auf den Besatz, dass Schmutzfluid von der entsprechenden Reinigungswalze abgelöst wird (und insbesondere feuchtes Schmutzfluid abgelöst wird) und über die Mündungsöffnung 56 in die Schmutzfluidtankeinrichtung 32 befördert wird.
- Dies ist in
Figur 3 durch die Pfeile mit dem Bezugszeichen 74 angedeutet. - Dieses durch das Abstreifelement 70 abgelöste Schmutzfluid 74 kann auch noch Grobschmutzpartikel enthalten, welche nicht direkt über die Mündungsöffnung 56 in die Schmutzfluidtankeinrichtung 32 befördert wurden.
- Die Bodenreinigungsmaschine 10 mit der Ausbildung gemäß
Figur 3 hat eine Kehrfunktion, durch die sich Grobschmutz (und auch trockener Grobschmutz) von dem zu reinigenden Boden 16 kehren lässt. Sie hat eine Wischfunktion, durch welche sich über die Befeuchtung 68 der zu reinigende Boden 16 befeuchten lässt und nasses Schmutzfluid aufgenommen werden kann und über das Abstreifelement 70 abgelöst werden kann und in die Schmutzfluidtankeinrichtung 32 befördert wird. - Sie weist auch einen Kombinationsbetrieb auf, bei dem gleichzeitig (wie in
Figur 3 angedeutet) Grobschmutz von dem zu reinigenden Boden 16 aufgenommen werden kann und über die Reinigungswalzeneinheit 18 ein Feuchtwischvorgang durchgeführt wird. - Die Reinigungswalzeneinheit 18 ist insbesondere austauschbar an dem Reinigungskopf 12 positioniert. Dadurch lässt sich beispielsweise die Reinigungswalzeneinheit 18 bzw. eine Reinigungswalze auf einfache Weise selber reinigen. Dadurch ist auch eine Anpassung an den speziellen Reinigungsvorgang möglich. Wenn beispielsweise eine Reinigungswalze der Reinigungswalzeneinheit 18 einen Textilbesatz wie einen Mikrofaserbesatz aufweist, lässt sich gleichzeitig eine Nassreinigung und eine Kehrreinigung vornehmen. Es ist beispielsweise aber auch möglich, dass als Reinigungswalze eine Reinigungswalze mit Borstenbesatz verwendet wird, um einen reinen Kehrvorgang durchzuführen. (Insbesondere ist beim reinen Kehrvorgang eine Befeuchtung der Reinigungswalzeneinheit 18 bzw. des zu reinigenden Bodens 16 abgeschaltet.)
- Es ist insbesondere vorgesehen, dass die Schmutzfluidtankeinrichtung 32 insbesondere mit daran fixiertem Kehrelement 62 schwimmend zu der Basis 30 angeordnet ist, um beispielsweise das Kehrelement 62 unabhängig von einer Besatzlänge der Reinigungswalzeneinheit 18 in gleicher Position zu der Reinigungswalzeneinheit 18 positionieren zu können.
- Die grundsätzliche Funktionsweise der Bodenreinigungsmaschine 10, wie sie anhand der
Figur 3 erläutert wurde, ist auch möglich für einen Reinigungskopf 12 ohne Haltestabeinrichtung 36 und insbesondere für eine selbstfahrende und selbstlenkende Reinigungsmaschine ("Reinigungsroboter"). Im Falle einer solchen selbstfahrenden und selbstlenkenden Bodenreinigungsmaschine sind dann insbesondere der Batteriehalter 48 und die Tankeinrichtung für Reinigungsflüssigkeit 50 in dem Reinigungskopf 12 selber angeordnet. - Bei der Bodenreinigungsmaschine 10 wird Schmutzfluid über die Reinigungswalzeneinheit 18 in die Schmutzfluidtankeinrichtung 32 saugaggregatfrei befördert. Die Schmutzfluidtankeinrichtung 32 kann zur Entleerung von dem Reinigungskopf 12 abgenommen werden.
- Es ist grundsätzlich auch möglich, dass Schmutzfluid, welches sich in der Schmutzfluidtankeinrichtung 32 befindet, abgesaugt wird. Dazu ist beispielsweise eine entsprechende Saugaggregateinrichtung und ein zugehöriger weiterer Schmutzfluidtank an der Haltestabeinrichtung 36 angeordnet.
- Weitere Aspekte der Bodenreinigungsmaschine 10 bzw. vorteilhafte Ausgestaltungen werden im Folgenden anhand der
Figuren 4 bis 21 beschrieben. - Bei einem Ausführungsbeispiel weist die Haltestabeinrichtung 36 einen ersten Bereich 76 und einen zweiten Bereich 78 auf. Der erste Bereich 76 ist abgewinkelt zu dem zweiten Bereich 78 angeordnet. Der erste Bereich 76 ist ein distaler Bereich, und an dem zweiten Bereich 78 sitzt der Handgriff 38 und damit auch der proximale Bereich.
- Insbesondere ist an dem Handgriff 38 oder an dem zweiten Bereich 78 ein Bedienungspaneel mit mehreren Bedienelementen angeordnet.
- Bei dem in den
Figuren 1 und2 gezeigten Ausführungsbeispiel ist die Tankeinrichtung 50 für Reinigungsflüssigkeit an dem zweiten Bereich 78 angeordnet. - Insbesondere umfasst das Bedienpaneel einen Schalter, über den schaltbar ist, ob eine Befeuchtung der Reinigungswalzeneinheit 18 und/oder des zu reinigenden Bodens 16 mittels Reinigungsflüssigkeit aus der Tankeinrichtung 50 für Reinigungsflüssigkeit 50 stattfindet. Dies ermöglicht es je nach Bedienerwahl, einen trockenen Kehrbetrieb oder einen Nasswischvorgang durchzuführen.
- Der erste Bereich 76 erstreckt sich in einer ersten Längsachse 80 (vergleiche auch
Figur 1 ), und der zweite Bereich 78 längs der zweiten Längsachse 42. Der erste Bereich 76 und der zweite Bereich 78 liegen in einem stumpfen Winkel 82 (Figur 1 ) zueinander, welcher im Bereich zwischen 120° und 170° liegt. - Bei einem konkreten Ausführungsbeispiel liegt dieser stumpfe Winkel 82 bei ca. 145°.
- Der erste Bereich 76 und der zweite Bereich 78 sind fortlaufend miteinander verbunden.
- Über den ersten Bereich 76 ist die Haltestabeinrichtung 36 mit einem Schwenkgelenk 84 an dem Reinigungskopf 12 und dabei an die Basis 30 angelenkt. Wie oben erwähnt fällt die Schwenkachse 40 des Schwenkgelenks 84 mit der Rotationsachse 46 der Rotation der Reinigungswalzeneinheit 18 zusammen.
- Das Schwenkgelenk 84 ist als Orbitalgelenk ausgebildet. Es umfasst eine Bahnführungseinrichtung 86, welche drehfest an dem Reinigungskopf 12 und dabei an der Basis 30 sitzt. Diese Bahnführungseinrichtung 86 umfasst einen Kreisbahnabschnitt 88. Ein Zentrum des Kreisbahnabschnitts 88 liegt auf der Schwenkachse 40/Rotationsachse 46.
- Mit dem ersten Bereich 76 ist drehfest eine Gegeneinrichtung 90 verbunden, welche sich an der Bahnführungseinrichtung 86 abstützt.
- Die Gegeneinrichtung 90 ist gleitend an dem Kreisbahnabschnitt 88 der Bahnführungseinrichtung 86 geführt; es liegt eine orbitale Führung der Gegeneinrichtung 90 an dem Kreisbahnabschnitt 88 der Bahnführungseinrichtung 86 vor.
- Es sind dabei mindestens drei Abstützstellen für die Führung der Gegeneinrichtung 90 an der Bahnführungseinrichtung 86 vorgesehen.
- Der Kreisbahnabschnitt 88 ist bezogen auf die Längsachse 24 des Reinigungskopfs 12 mit einem Teilbereich hinter der Reinigungswalzeneinheit 18 angeordnet. Bezogen auf eine Höhenachse 92, welche senkrecht zu der Längsachse 24 und senkrecht zu der Aufstellfläche 14 ist, ist der Kreisbahnabschnitt 88 mit einem Teilbereich oberhalb der Reinigungswalzeneinheit 18 angeordnet.
- Der Kreisbahnabschnitt 88 ist beispielsweise mindestens näherungsweise als Viertelkreisabschnitt ausgebildet, welcher gewissermaßen die Reinigungswalzeneinheit 18 umgreift.
- Das Schwenkgelenk ist mittig zwischen der ersten lateralen Seite 26 und der zweiten lateralen Seite 28 an der Basis 30 positioniert. Es ist insbesondere symmetrisch an dem Reinigungskopf 12 angeordnet. Es liegt an einer Mittelebene 94 (vergleiche
Figur 2 ), welche mittig zwischen der ersten lateralen Seite 26 und der zweiten lateralen Seite 28 liegt und dabei senkrecht zu der Rotationsachse 46 bzw. Schwenkachse 40 orientiert ist. - Die Mittelebene 94 ist ferner senkrecht zu der Aufstellfläche 14 orientiert.
- Ein Antriebsmotor 98, welcher insbesondere ein Elektromotor ist, ist zum Antrieb der Reinigungswalzeneinheit 18 in der Rotationsbewegung der Rotationsachse 46 mit der Rotationsrichtung 52 vorgesehen. Dieser ist drehfest mit der Haltestabeinrichtung 36 verbunden, so dass er bei einer Schwenkbewegung der Haltestabeinrichtung 36 um die Schwenkachse 40 mit verschwenkt wird.
- Grundsätzlich ist es dabei möglich, dass der Antriebsmotor 98 noch in dem Reinigungskopf 12 positioniert ist mit der genannten Verschwenkbarkeit.
- Bei einem Ausführungsbeispiel (vergleiche die
Figuren 4 bis 6 ) ist der Antriebsmotor 98 an der Haltestabeinrichtung 36 positioniert und dabei insbesondere an dem ersten Bereich 76 positioniert. - Insbesondere weist der erste Bereich 76 der Haltestabeinrichtung 36 ein Gehäuse 100 auf, welches den Antriebsmotor 98 aufnimmt.
- Bei einer Variante eines Ausführungsbeispiels ist ein Batteriehalter 48' an dem ersten Bereich 76 oder an einem Übergang zwischen dem ersten Bereich 76 und dem zweiten Bereich 78 angeordnet. (Bei dem in den
Figuren 1 und2 gezeigten Ausführungsbeispiel ist der Batteriehalter 48 an dem zweiten Bereich 78 angeordnet.) - An dem Reinigungskopf 12 und dabei an der Basis 30 ist ein Freiraum 102 (vergleiche
Figur 5 ) gebildet, welcher mittig zwischen der ersten lateralen Seite 26 und der zweiten lateralen Seite 28 ist und dabei an der Mittelebene 94 liegt. Dieser Freiraum 102 bildet einen Schwenkraum, in welchem die Haltestabeinrichtung 36 beweglich ist, wobei insbesondere dann der erste Bereich 76 in diesem Freiraum 102 beweglich ist. - Der Freiraum 102 ist zu dem hinteren Ende 22 hin offen.
- Das Gehäuse 100 mit dem Antriebsmotor 98 ist in dem Freiraum 102 beweglich.
- Über den Freiraum 102 ergibt sich ein großer Schwenkwinkelbereich für die Verschwenkbarkeit der Haltestabeinrichtung 36 um die Schwenkachse 40 relativ zu der Basis 30.
- Die Bodenreinigungsmaschine 10 weist eine Getriebeeinrichtung 104 auf (
Figur 7 ), welche zur Übertragung eines Drehmoments von dem Antriebsmotor 98, welcher beabstandet zu der Reinigungswalzeneinheit 18 positioniert ist, auf die Reinigungswalzeneinheit 18 dient. Bei einem Ausführungsbeispiel umfasst die Getriebeeinrichtung 104 auch ein Untersetzungsgetriebe, welches zur Herabsetzung der Drehzahl dient, so dass eine Drehzahl der Reinigungswalzeneinheit 18 bei einer Rotation um die Rotationsachse 46 niedriger ist als eine Antriebsdrehzahl des Antriebsmotors 98. - Die Getriebeeinrichtung 104 umfasst beispielsweise ein Riemengetriebe und das Drehzahl-Untersetzungsgetriebe.
- Die Reinigungswalzeneinheit 18 ist bzw. umfasst eine Walzenaufnahme 106. Die Walzenaufnahme 106 wiederum umfasst eine Welle 108, welche drehmomentwirksam mit der Getriebeeinrichtung 104 verbunden ist. Die Welle 108 rotiert um die Rotationsachse 46 bei entsprechendem Antrieb durch den Antriebsmotor 98.
- Bei einem Ausführungsbeispiel umfasst die Welle 108 (vergleiche
Figur 6 ) einen ersten Wellenteil 110, einen zweiten Wellenteil 112 und einen Mittelteil 114, welcher mit dem ersten Wellenteil 110 und dem zweiten Wellenteil 112 verbunden ist. Die Welle 108 mit dem ersten Wellenteil 110, dem zweiten Wellenteil 112 und dem Mittelteil 114 bildet eine einheitliche Welle mit einer einzigen Rotationsachse , nämlich der Rotationsachse 46. - Der Mittelteil 114 liegt mittig zwischen der ersten lateralen Seite 26 und der zweiten lateralen Seite 28 und liegt dabei an der Mittelebene 94.
- Der erste Wellenteil 110 nimmt einen ersten Walzenteil 116 und der zweite Wellenteil 112 nimmt einen zweiten Walzenteil 118 der Reinigungswalzeneinheit 18 auf. Der erste Walzenteil 116 und der zweite Walzenteil 118 sind getrennte Einheiten, welche aber um die gleiche Rotationsachse 46 rotieren, wenn sie an der Welle 108 sitzen.
- Der erste Walzenteil 116, welcher an dem ersten Wellenteil 110 sitzt, reicht bis zu der ersten lateralen Seite 26 oder fast bis an diese. Der zweite Walzenteil 118, welcher an dem zweiten Wellenteil 112 sitzt, reicht bis zu der zweiten lateralen Seite 28 oder fast bis an diese. Es verbleibt dadurch kein oder nur ein minimaler walzenfreier Abstand zwischen der Reinigungswalzeneinheit 18 und den entsprechenden lateralen Seiten 26, 28. Dadurch ist eine randnahe Reinigung möglich.
- Der Mittelteil 114 der Welle 108 ist walzenfrei. An ihn ist die Getriebeeinrichtung 104 drehmomentwirksam angekoppelt. Es liegt ein Mittelantrieb der Reinigungswalzeneinheit 18 vor.
- Der erste Walzenteil 116 und der zweite Walzenteil 118 werden jeweils von außen auf den zugehörigen Wellenteil 110 bzw. 112 aufgesteckt und entsprechend mit dem zugehörigen Wellenteil 110 bzw. 112 verrastet, um eine drehfeste Verbindung zu erhalten.
- Bezogen auf die Längsachse 24 sind der Mittelteil 114 der Welle 108 und damit der Walzenaufnahme 106 und das Schwenkgelenk 84 fluchtend ausgerichtet. Sie liegen an der Mittelebene 94 und sind insbesondere jeweils spiegelsymmetrisch zu der Mittelebene 94 ausgebildet.
- Der Reinigungskopf 12 weist, wie oben erwähnt, (mindestens) ein Abstützelement 120 auf. Insbesondere ist genau ein Abstützelement 120 vorgesehen (
Figur 7 ,Figur 19(d) ,Figur 23 ,24 ). Das Abstützelement 120 sitzt beabstandet zu der Reinigungswalzeneinheit 18 und definiert mit dieser die Aufstellfläche 14. Das Abstützelement 120 sitzt dabei an der Basis 30. Auch wenn die Schmutzfluidtankeinrichtung 32 abgenommen ist, kann der Reinigungskopf 12 mit der Reinigungswalzeneinheit 18 und dem Abstützelement 120 auf einem Boden 16 aufgestellt werden. Das Abstützelement 120 umfasst einen Pfosten 122, an dem eine Rolle oder ein Gleiter 124 sitzt. Die Rolle oder der Gleiter 124 dient zur Abstützung auf dem zu reinigenden Boden 16. Die Rolle oder der Gleiter 124, wobei beispielsweise eine Gleitkufe vorgesehen ist, wird bei einer Führung der Bodenreinigungsmaschine 10 über den zu reinigenden Boden 16 geführt. - Die Basis 30 hat der Schmutzfluidtankeinrichtung 32 zugewandt eine Unterseite 126. Von dieser Unterseite 126 ragt quer und insbesondere senkrecht der Pfosten 122 in Richtung der Aufstellfläche 14 ab.
- Es ist insbesondere vorgesehen, dass das Abstützelement 120 bezogen auf die Längsachse 24 fluchtend zu dem Mittelteil 114 der Welle 108 ausgerichtet ist.
- Insbesondere liegt das Abstützelement 120 an der Mittelebene 94.
- Wenn eine Mehrzahl von Abstützelementen vorgesehen sind, dann sind diese insbesondere in einer Reihe angeordnet, welche an der Mittelebene 94 liegt.
- An dem Mittelteil 114 der Welle 108 sitzt bei einer Ausführungsform kein Walzenbereich, und bei der Reinigung bleibt ein Mittelsteifen an dem Mittelteil 114 an dem zu reinigenden Boden 16 nicht beaufschlagt. (Durch versetztes Überfahren erfolgt hier eine Reinigung.) Durch die fluchtende Anordnung des Abstützelements 120 hierzu wird das Abstützelement 120 an einem nicht beaufschlagten Bereich des Bodens 16 verschoben.
- Die Schmutzfluidtankeinrichtung 32 ist in ihrer Form und in ihren Abmessungen angepasst an die Basis 30. Die Schmutzfluidtankeinrichtung weist den Boden 58 mit der Wandung 16 und der Mündungsöffnung 56 auf. Die Schmutzfluidtankeinrichtung 32 hat eine Unterseite 127 und eine Oberseite 128. Bei an der Basis 30 fixierter Schmutzfluidtankeinrichtung 32 ist die Oberseite 128 der Schmutzfluidtankeinrichtung 32 der Unterseite 126 der Basis 30 zugewandt. Die Unterseite 127 der Schmutzfluidtankeinrichtung 32 liegt an dem Boden 58 und ist der Oberseite 128 abgewandt.
- Zwischen der Unterseite 127 und der Oberseite 128 liegt die Wandung 60 und eine weitere Wandung 130, welche die Schmutzfluidtankeinrichtung 32 abschließt mit einem Innenraum zur Aufnahme von Schmutzfluid.
- Die Wandung 60 der Schmutzfluidtankeinrichtung 32, an welcher die Mündungsöffnung 56 sitzt, weist einen Ausschnitt 132 auf (vergleiche
Figur 6 ), welcher an den Mittelteil 114 der Welle 108 angepasst ist. Wenn die Schmutzfluidtankeinrichtung 32 an der Basis 30 sitzt, dann sitzt zumindest teilweise der Mittelteil 114 in dem Ausschnitt 132 der Schmutzfluidtankeinrichtung 32 mit freier Rotierbarkeit. - Die Mündungsöffnung 56 der Mündungseinrichtung 54 umfasst insbesondere einen ersten Öffnungsteil 134 und einen zweiten Öffnungsteil 136.
- Der erste Öffnungsteil 134 ist dem ersten Walzenteil 116 zugeordnet und der zweite Öffnungsteil 136 ist dem zweiten Walzenteil 118 zugeordnet.
- Es kann vorgesehen sein, dass die Schmutzfluidtankeinrichtung 32 eine erste Kammer 138 und eine zweite Kammer 140 aufweist. An der ersten Kammer 138 ist der erste Öffnungsteil 134 gebildet und an der zweiten Kammer 140 ist das zweite Öffnungsteil 136 gebildet. Über den ersten Öffnungsteil 134 wird Schmutzfluid direkt in die erste Kammer 138 eingekoppelt und über den zweiten Öffnungsteil 136 wird Schmutzfluid direkt in die zweite Kammer 140 eingekoppelt.
- Die beiden Kammern 138 und 140 können dabei fluiddicht voneinander getrennt sind oder fluidwirksam miteinander verbunden sein, so dass sich Schmutzfluid in der Schmutzfluidtankeinrichtung 32 gleichmäßig verteilen kann.
- Die Schmutzfluidtankeinrichtung 32 weist einen Deckel 142 auf, welcher mindestens teilweise die Oberseite 128 ausbildet. Dieser Deckel 142 ist beabstandet zu dem Boden 58.
- Der Deckel 142 ist bei von dem Reinigungskopf 12 abgenommener Schmutzfluidtankeinrichtung 32 abnehmbar, um die Schmutzfluidtankeinrichtung 32 entleeren zu können.
- Die Trittlasche 34 ist an der Wandung 130 der Schmutzfluidtankeinrichtung 32 angeordnet. Sie ist derart angeordnet, dass sie bei an der Basis 30 fixierter Schmutzfluidtankeinrichtung 32 beabstandet zu der Aufstellfläche 14 ist.
- Die Trittlasche 34 ist, wenn die Schmutzfluidtankeinrichtung 32 an dem Reinigungskopf 12 fixiert ist, fluchtend zu dem Freiraum 102 angeordnet. Sie ist eine Fortsetzung des Freiraums 102 von dem hinteren Ende 22 weg. Sie ist dabei so angeordnet, dass sie den entsprechenden Schwenkraum der Haltestabeinrichtung 36 in dem Freiraum 102 nicht behindert.
- Die Trittlasche 34 liegt an der Mittelebene 94 und ist insbesondere spiegelsymmetrisch zu dieser angeordnet und ausgebildet.
- Bei einem Ausführungsbeispiel umfasst die Trittlasche 34 eine Platte 144, welche hochgezogene Randwandungen 146 aufweist (vergleiche
Figur 5 ). Die Randwandungen 146 sind dabei abgerundet ausgebildet. - Die Trittlasche 34 weist eine Breite (in einer Richtung parallel zur Schwenkachse 40 bzw. Rotationsachse 46) auf, welche mindestens so breit ist wie typische Abmessungen eines Fußes mit Schuhen.
- Ein Bediener kann seinen Fuß auf die Trittlasche 34 aufsetzen und dann durch entsprechende Kraftausübung den Reinigungskopf 12 abheben, um die Schmutzfluidtankeinrichtung 32 von der Basis 30 zu lösen. Dies wird untenstehend noch näher beschrieben.
- Die hochgezogenen abgerundeten Randwandungen 146 der Trittlasche 134 verhindern ein seitliches Abrutschen eines Bedienerfußes. Es werden an der Platte 144 scharfe Kanten vermieden.
- An der Platte 144 sind bei einer Ausführungsform beabstandete Stege oder Rillen angeordnet, welche das Abrutschen eines Bedienerfußes verhindern sollen.
- Die Trittlasche 34 ist fluchtend in Fortsetzung des Freiraums 102 angeordnet. Sie ist bezogen auf die Längsachse 24 des Reinigungskopfs 12 fluchtend zu dem Schwenkgelenk 84 und auch fluchtend zu dem Mittelteil 114 der Welle 108 ausgerichtet.
- Die Schmutzfluidtankeinrichtung 32 weist eine Entnahmerichtung 148 (
Figur 6 ) von der Basis 30 weg auf. Die Entnahmerichtung 148 führt von der Unterseite 126 der Basis 30 weg in Richtung der Aufstellfläche 14. - Die Schmutzfluidtankeinrichtung 32 ist derart von dem Reinigungskopf 12 entnehmbar, dass beispielsweise durch Anheben des Reinigungskopfs 12 und Drücken der Schmutzfluidtankeinrichtung 32 (beispielsweise an der Trittlasche 34) in Richtung der Entnahmerichtung 148, oder durch Wegziehen der Schmutzfluidtankeinrichtung 32 von der Basis 30 in der Entnahmerichtung 148 gelöst und damit abgenommen werden kann.
- Alternativ ist es auf vorteilhafte Weise möglich, dass bei auf dem zu reinigenden Boden 16 aufgestelltem Reinigungskopf 12 mit fixierter Schmutzfluidtankeinrichtung 32 ein Bediener über Aufstellen seines Fußes auf die Trittlasche 34 und entsprechender Kraftausübung die Schmutzfluidtankeinrichtung 32 auf dem zu reinigenden Boden 16 fixieren kann und durch Abheben nach oben des Reinigungskopfs 12 die Schmutzfluidtankeinrichtung 32 von der Basis 30 gelöst wird und dabei am Boden verbleibt. Diese Vorgehensweise, wie sie untenstehend noch näher beschrieben wird, hat den Vorteil, dass die Schmutzfluidtankeinrichtung 32 mindestens näherungsweise ortsfest bleibt und dadurch ein Schwanken von Schmutzfluid und insbesondere Flüssigkeit in der Schmutzfluidtankeinrichtung 32 weitgehend vermieden ist.
- In dem Reinigungskopf 12 ist begrenzt durch die Unterseite 126 der Basis 30 ein Raum 150 gebildet, in welchem die Schmutzfluidtankeinrichtung 32, wenn sie an der Basis 30 fixiert ist, positioniert ist. Das Abstützelement 120 liegt ebenfalls in diesem Raum.
- Es ist an der Schmutzfluidtankeinrichtung 32, dem Abstützelement 120 zugeordnet, eine durchgehende Ausnehmung 152 (
Figuren 7 ,19(d) ,24 ) gebildet. Diese durchgehende Ausnehmung 152 ist an der Oberseite 128 und an der Unterseite 127 offen. Seitlich ist die durchgehende Ausnehmung 152 geschlossen, so dass diese fluiddicht abgeschlossen ist. - Wenn die Schmutzfluidtankeinrichtung 32 an der Basis 30 sitzt, dann ist das Abstützelement 120 durch die durchgehende Ausnehmung 152 durchgetaucht, so dass sich der Reinigungskopf 12 über das Abstützelement 120 an dem zu reinigenden Boden 16 abstützen kann.
- Die durchgehende Ausnehmung 152 ist so dimensioniert, dass das Abstützelement 120 durchtauchen kann und entsprechend bei der Abnahme der Schmutzfluidtankeinrichtung 32 von der Basis 30 auch austauchen kann. Bei dem gezeigten Ausführungsbeispiel ist die durchgehende Ausnehmung 152 nach allen Seiten geschlossen.
- Es ist grundsätzlich auch möglich, dass die durchgehende Ausnehmung 152 zu dem hinteren Ende 22 hin offen ist.
- Bei einer bevorzugten Ausführungsform hat die durchgehende Ausnehmung 152 die Gestalt eines (Hohl-)Zylinders.
- Wenn die Schmutzfluidtankeinrichtung 32 an der Basis 30 sitzt, dann ist die durchgehende Ausnehmung 152 entsprechende der fluchtenden Ausrichtung des Abstützelements 120 bezogen auf die Längsachse 24 fluchtend mit dem Mittelteil 114 der Welle 108, dem Schwenkgelenk 84 und der Trittlasche 34 angeordnet.
- Die Schmutzfluidtankeinrichtung 32 ist an der Basis 30 hängend gehalten. Es sind dazu eine Mehrzahl von Haltern 154 (vergleiche
Figuren 11 und13 ) vorgesehen, welche an der Basis 30 sitzen und von deren Unterseite 126 weg in Richtung der Aufstellfläche 14 ragen. - Bei einem Ausführungsbeispiel sind ein erster Halter und ein zweiter beabstandeter Halter vorgesehen. Diese sind wie untenstehend beschrieben ausgebildet und insbesondere gleich ausgebildet. Vorzugsweise sind der erste Halter und der zweite Halter spiegelsymmetrisch zu der Mittelebene 94 angeordnet und zwischen ihnen liegt der Freiraum 102.
- In
Figur 9 ist eine erste Stelle 156 angedeutet, an welcher der erste Halter sitzt, und es ist eine zweite Stelle 158 angedeutet, an welcher der zweite Halter sitzt. Diese sind, wie erwähnt, die Befestigungsstellen für die Schmutzfluidtankeinrichtung 32 an der Basis 30. - Die Halter 154 sind als Haltedome oder Haltepilze ausgebildet.
- Sie wirken zusammen mit einer jeweiligen Aufnahme 160 der Schmutzfluidtankeinrichtung 32.
- Wenn die Schmutzfluidtankeinrichtung 32 an der Basis 30 gehalten ist, dann taucht der Halter 154 in die zugeordnete Aufnahme 160 ein (
Figur 11 ). - Der Halter 154 und die zugeordnete Aufnahme 160 bilden eine Halter-Aufnahme-Kombination 162, welche als Rastverbindungseinrichtung ausgebildet ist. In
Figur 11 ist eine entsprechende Halteposition bzw. Rastposition gezeigt. - Der Halter 154 umfasst ein erstes Element 164, welches mit einem zweiten Element 166 der Aufnahme 160 an der Schmutzfluidtankeinrichtung 32 korrespondiert.
- Das erste Element 164 hat einen Aufnahmebereich 168 für das zweite Element 166. Dieser Aufnahmebereich 168 ist beispielsweise zylindrisch ausgebildet.
- Der Aufnahmebereich 168 des ersten Elements 164 ist durch einen Wulst 170 begrenzt. Der Wulst 170 hat einen Durchmesser (in einer Richtung quer zu der Höhenachse 92), welcher größer ist als der entsprechende Durchmesser des Aufnahmebereichs 168.
- Bei einem Ausführungsbeispiel ist der Wulst 170 als ringförmiger Bereich an dem ersten Element 164 angeordnet. Er weist einen ersten Flächenbereich 172 auf, welcher dem Aufnahmebereich 168 zugewandt ist. An den ersten Flächenbereich 172 schließt sich ein zweiter Flächenbereich 174 an, welcher dem Aufnahmebereich 168 abgewandt ist.
- Der Wulst 170 ist an dem ersten Flächenbereich 172 konisch ausgebildet von dem Aufnahmebereich 168 weg. Er ist an dem zweiten Flächenbereich 174 ebenfalls konisch ausgebildet mit einer Neigung zu dem Aufnahmebereich 168 hin.
- Durch den ersten Flächenbereich 172 ist eine schiefe Ebene gebildet, welche, wie untenstehend noch näher erläutert wird, einen Kraftaufwand erfordert, um das zweite Element 166 von dem ersten Element 164 zu lösen. Durch den zweiten Flächenbereich 174 ist ebenfalls eine schiefe Ebene gebildet, welche einen Kraftaufwand erfordert, um das zweite Element 166 mit dem ersten Element 164 zu verbinden.
- Es ist dadurch (durch einen Bediener) ein gewisser Kraftaufwand erforderlich, um die Schmutzfluidtankeinrichtung 32 von der Basis 30 abzunehmen. Ferner ist durch einen Bediener ein gewisser Kraftaufwand notwendig, um die Schmutzfluidtankeinrichtung 32 an der Basis 30 einzusetzen. Dieser Kraftaufwand ist dabei durch den Konuswinkel des ersten Flächenbereichs 172 und durch den Konuswinkel des zweiten Flächenbereichs 174 bestimmt.
- Bei einem Ausführungsbeispiel ist der Konuswinkel des ersten Flächenbereichs 172 größer als der Konuswinkel des zweiten Flächenbereichs 174 (vergleiche
Figur 11 ). Dort ist der erste Konuswinkel für den ersten Flächenbereich 172 mit dem Bezugszeichen 176 bezeichnet. Der zweite Konuswinkel für den zweiten Flächenbereich 174 ist mit 178 bezeichnet. Der zweite Konuswinkel 178 ist kleiner als der erste Konuswinkel 176. Dies bedeutet, dass der Kraftaufwand zur Lösung und Abnahme der Schmutzfluidtankeinrichtung 32 von der Basis 30 größer ist als zum Einsetzen (zum Fixieren) der Schmutzfluidtankeinrichtung 32 an der Basis 30. - Das zweite Element 166 an der Aufnahme 160 der Schmutzfluidtankeinrichtung 32 ist als Spreizelement ausgebildet, welches mindestens zwei und vorzugsweise mindestens drei Laschen aufweist, welche quer zur Höhenachse 92 beweglich sind (unter Vergrößerung des Abstands).
- Das zweite Element 166 als Spreizelement ist auf den Halter 154 aufgeschoben.
- Wenn die Aufnahme 160 an dem zugeordneten Halter 154 positioniert wird, dann wird unter entsprechendem Kraftaufwand durch Überfahren des zweiten Elements 166 des zweiten Flächenbereichs 174 eine Aufspreizung durchgeführt unter Vergrößerung des Abstands der Laschen, bis der Aufnahmebereich 168 erreicht ist. Die Laschen des Spreizelements 166 sind insbesondere federnd angeordnet und schnappen zurück. Der Wulst 170 dient als Sperre, welcher ein Herabfallen der Schmutzfluidtankeinrichtung 32 von der Basis 30 verhindert.
- Es ist über die Halter-Aufnahme-Kombination 162 eine Rastverbindung hergestellt.
- Zur Lösung der Rastverbindung übt ein Bediener Kraft auf die Schmutzfluidtankeinrichtung 32 aus und bewegt das zweite Element (das Spreizelement) über den Wulst 170 und dabei über den ersten Flächenbereich 172. Es ist dazu ein entsprechender Kraftaufwand zur Aufspreizung des zweiten Elements 166 (des Spreizelements) notwendig, um den Querschnitt entsprechend so zu erweitern, dass der Wulst 170 durch das zweite Element 166 überfahrbar ist.
- Ein entsprechender Zwischenzustand nach dem Überfahren ist in
Figur 13 gezeigt. Dort ist die Rastverbindung aufgehoben. Das Spreizelement 166 (das zweite Element 166) hat den Wulst 170 überfahren und liegt außerhalb des Aufnahmebereichs 168. - In der Stellung der Schmutzfluidtankeinrichtung 32 gegenüber der Basis 30, welche in
Figur 13 gezeigt ist, fällt die Schmutzfluidtankeinrichtung 32 von der Basis 30 ab, wenn diese parallel zur Höhenrichtung 92 abgehoben wird. - Bei der Sperrstellung gemäß
Figur 11 ist jedoch die Rastverbindung hergestellt und die Schmutzfluidtankeinrichtung 32 ist an der Basis 30 fixiert. - Die Aufnahmen 160 an der Schmutzfluidtankeinrichtung 32 sind an der Oberseite 128 offen, um eben ein Eintauchen des entsprechenden Halters 154 zu ermöglichen. Die Aufnahme weist eine hohlkegelstumpf-förmige Erweiterung 180 zu der Oberseite 128 hin auf. Diese Erweiterung 180 bildet eine Einführhilfe und Zentrierhilfe für den Halter 154, welcher stiftförmig ausgebildet ist, in die zugeordnete Aufnahme 160.
- Wenn die Schmutzfluidtankeinrichtung 32 an der Basis 30 über die Halter-Aufnahme-Kombination 162 (an den Stellen 156, 158) gehalten ist, dann ist die Schmutzfluidtankeinrichtung 32 beweglich (in einer Richtung/Gegenrichtung parallel zur Höhenachse 92) beweglich gelagert und dadurch schwimmend gelagert. Das Gewicht der Bodenreinigungsmaschine 10 stützt sich an dem zu reinigenden Boden 16 über die Reinigungswalzeneinheit 18 und das Abstützelement 120 ab. Die Schmutzfluidtankeinrichtung 32 hat keine diesbezügliche Abstützungsfunktion. Die Schmutzfluidtankeinrichtung 32 ist quer und insbesondere senkrecht zur Aufstellfläche 14 beweglich (schwimmend) gelagert.
- Wenn beispielsweise ein Walzendurchmesser der Reinigungswalzeneinheit 18 variiert (aufgrund von Herstellungstoleranzen oder Abnutzung), befindet sich dennoch das Kehrelement 62 in seiner optimalen Position zu dem zu reinigenden Boden 16.
- Durch das Schwenkgelenk 84 weist die Haltestabeinrichtung 36 einen Schwenkwinkelbereich der Schwenkbeweglichkeit zu dem Reinigungskopf 12 auf, welcher zwischen einer unteren Grenze und einer oberen Grenze liegt.
- Ein Schwenkwinkel 182 (vergleiche
Figur 19(a) ) ist dabei insbesondere quantitativ als ein Winkel zwischen der zweiten Längsachse 42 der Haltestabeinrichtung 36 und einer Ebene 184 parallel zu der Aufstellfläche 14. - Ein minimaler Schwenkwinkel 182, d.h. die untere Grenze, liegt bei 0°oder größer 0°. Insbesondere ist die untere Grenze kleiner als 50° und vorzugsweise kleiner als 40° und insbesondere vorzugsweise kleiner als 30°.
- Die untere Grenze ist durch Anlage der Haltestabeinrichtung 36 an einer Unterseite, welche den Freiraum 102 (vergleiche
Figur 9 ) begrenzt, vorgegeben. - Durch die Ausbildung des Schwenkgelenks 84 ist als Orbitalgelenk und durch den Freiraum 102 kann die untere Grenze bei ca. 0° liegen und kann insbesondere kleiner als 10° und vorzugsweise kleiner als 5° sein.
- Je kleiner die untere Grenze des Schwenkwinkels 182, desto kleiner ist die Gesamthöhe der Bodenreinigungsmaschine 10 (der Höhe von Reinigungskopf 12 und der Haltestabeinrichtung 36) in der Höhenachse 92 senkrecht zu der Aufstellfläche 14. Je kleiner wiederum die Gesamthöhe ist, desto besser ist die Unterfahrbarkeit beispielsweise an Möbeln durch die Bodenreinigungsmaschine 10. Wenn beispielsweise die untere Grenze des Schwenkwinkels 182 sehr klein ist, dann ist im Wesentlichen die Unterfahrhöhe bestimmt durch die Höhe des Reinigungskopfs 12 in der Höhenachse 92 einschließlich der entsprechenden Höhe des Schwenkwinkels 182.
- Weiterhin weist der Schwenkwinkelbereich eine obere Grenze auf (
Figur 19(b) ). - Die obere Grenze des Schwenkwinkels 182 ist als Raststellung vorgegeben (
Figur 19 ). Sie liegt insbesondere im Bereich zwischen 80° und 120° des Schwenkwinkels 182. Bei einem bevorzugten Ausführungsbeispiel liegt sie bei ca. 90° (Figur 19(b) ). - Die obere Grenze ist so, dass für die Haltestabeinrichtung 36 eine Parkposition mit Raststellung bezüglich des Reinigungskopfs 12 vorgesehen ist, wobei dann eine Schwenkbarkeit bezüglich dem Reinigungskopf 12 gesperrt ist in dem Sinne, dass ein erhöhter Kraftaufwand notwendig ist, um eine Schwenkbarkeit der Haltestabeinrichtung 36 an dem Schwenkgelenk 84 um die Schwenkachse 40 wieder zu ermöglichen.
- Die Halter-Aufnahme-Kombination 162 wurde beschrieben über einen Halter 154, welcher mit der Basis 30 fest verbunden ist, und über eine Aufnahme 160, welche an der Schmutzfluidtankeinrichtung 32 angeordnet ist. Der Halter 154 ist dabei stabförmig ausgebildet und die Aufnahme 160 ist eine Öffnung. Es ist auch eine kinematische Umkehr möglich, bei der ein stabförmiges Element an der Schmutzfluidtankeinrichtung 32 angeordnet ist und eine entsprechende Aufnahme in Form einer Öffnung an der Basis 30.
- Zur Herstellung einer Parkposition 185 (
Figur 19(b) ) ist eine Verriegelungseinrichtung 186 (Figuren 10 ,12 ) vorgesehen. - Die Verriegelungseinrichtung 186 umfasst eine und insbesondere mindestens zwei und vorzugsweise genau zwei (
Figuren 10 ,12 ). Die Stift-Eintauchöffnung-Kombinationen 188 sind im Bereich des Schwenkgelenks 84 angeordnet. - In
Figur 9 sind eine erste Stelle 190 und eine zweite Stelle 192 gezeigt, an welchen jeweilige Stift-Eintauchöffnung-Kombinationen 188 positioniert sind. Die erste Stelle 190 und die zweite Stelle 192 sind spiegelsymmetrisch zu der Mittelebene 94. - Die Stift-Eintauchöffnung-Kombination 188 umfasst jeweils eine Eintauchöffnung 194, welche drehfest bezüglich der Bahnführungseinrichtung 86 an dem Reinigungskopf 12 und dabei insbesondere an der Basis 30 angeordnet ist.
- Als Gegenelement zu der entsprechenden Eintauchöffnung 194 ist ein Stift 196 vorgesehen, welcher drehfest mit der Haltestabeinrichtung 36 verbunden ist und mit dieser um die Schwenkachse 40 relativ zu dem Reinigungskopf 12 verschwenkbar ist.
- Der Stift 196 sitzt an einer Führung 198 und ist linearverschieblich längs einer Verschiebungsachse 200. Die Verschiebungsachse 200 ist mit der Schwenkbeweglichkeit der Haltestabeinrichtung 36 zu dem Reinigungskopf 12 beweglich. Sie ist quer zu einem Umfang des Kreisbahnabschnitts 88 orientiert.
- Der Stift 196 ist über eine Federeinrichtung 202 federbeaufschlagt, wobei eine Federkraft der Federeinrichtung 202 bestrebt ist, den Stift 196 in Richtung des Umfangs des Kreisbahnabschnitts 88 zu drücken. Die Federkraft der Federeinrichtung 202 wirkt auf den Reinigungskopf 12 zu.
- Der Stift 196 weist einen Wulst 204 auf (
Figur 10 ), welcher ringförmig angeordnet ist. Die Führung 198 weist einen ringförmigen Anschlag 206 für den Wulst 204 auf. Durch Anlage des Wulsts 204 an dem Anschlag 206 ist eine Sperre für die lineare Verschieblichkeit des Stifts 196 an der Führung 198 gebildet (Figur 10 ). Eine Grundstellung des Stifts 196 ist derart, dass die Federeinrichtung 202 den Stift 196 zu dem Umfang des Kreisbahnabschnitts 88 drückt, bis der Wulst 204 an dem Anschlag 206 anliegt (Figur 10 ). Diese Grundstellung liegt vor, wenn der Stift 196 nicht in die Eintauchöffnung 194 eingetaucht ist. Die Grundstellung wiederum liegt vor, wenn die Parkposition 185 der Haltestabeinrichtung 36 und des Reinigungskopfs 12 nicht erreicht ist, das heißt wenn die obere Grenze des Schwenkwinkels 182 nicht erreicht ist. Siehe dazuFigur 10 , wobei der Stift 196 nicht in die Eintauchöffnung 194 eingetaucht ist. - In dieser Grundstellung des Stifts 196 außerhalb der Eintauchöffnung 194 ist die freie Schwenkbarkeit der Haltestabeinrichtung 36 zu dem Reinigungskopf 12 um die Schwenkachse 40 gewährleistet.
- Die jeweilige Eintauchöffnung 194 ist an einem Blockelement 208 gebildet. Das Blockelement 208 umfasst die Eintauchöffnung 194 als eine Ausnehmung bzw. Bohrung. An dem Blockelement 208 ist außerhalb der Eintauchöffnung 194 eine erste schiefe Ebene 210 angeordnet bzw. gebildet. Diese steigt von dem Kreisbahnabschnitt 88 an. Sie liegt am Ende des Kreisbahnabschnitts 88 und an der ersten schiefen Ebene 210 erhöht sich der Abstand zu der Schwenkachse 40.
- Die erste schiefe Ebene 210 dient zum Einführen des Stifts 196 in die Eintauchöffnung 194 unter Verschiebung des Stifts 196 von dem Anschlag 206 unter entsprechendem Kraftaufwand entgegen der Federkraft der Federeinrichtung 202 weg. Dieser Kraftaufwand muss durch einen Bediener aufgebracht werden.
- Der Stift 196 weist eine erste Anlagefläche 212 auf, welche an einem Stirnende des Stifts 196 gebildet ist. Die erste Anlagefläche 212 ist an die erste schiefe Ebene 210 angepasst. Beim Einführen des Stifts 196 in der Eintauchöffnung 194 wird die erste Anlagefläche 212 an der ersten schiefen Ebene 210 unter Berührung der ersten schiefen Ebene 210 entlanggeführt.
- Die Eintauchöffnung 194, welche in dem Blockelement 208 gebildet ist, weist eine Wandung auf, welche als zweite schiefe Ebene 214 ausgebildet ist.
- Ausgehend von der unteren Grenze wird unter Vergrößerung des Schwenkwinkels 182 der Stift 196 entlang des Kreisbahnabschnitts 88 geführt und dann über die erste schiefe Ebene 210 in die Eintauchöffnung 194.
- Die zweite schiefe Ebene 214 dient zur Herausführung des Stifts 196 aus der Eintauchöffnung 194 durch Verkleinerung des Schwenkwinkels 182 ausgehend von der oberen Grenze.
- Der Stift 196 weist eine zweite Anlagefläche 216 auf, welche an die zweite schiefe Ebene 214 angepasst ist.
- Zum Herausführen des Stifts 196 aus der Eintauchöffnung 194 wird die zweite Anlagefläche 216 anliegend an der zweiten schiefen Ebene 214 entlang der zweiten schiefen Ebene 214 (unter Verkleinerung des Schwenkwinkels 182) geführt. Es muss dazu die Federkraft der Federeinrichtung 202 überwunden werden.
- Die erste schiefe Ebene 210 weist bei einem Ausführungsbeispiel einen kleineren Winkel auf als die zweite schiefe Ebene 214. Dadurch ist die Kraft, welche zum Aufheben der Verriegelung durch Herausführen des Stifts 196 aus der Eintauchöffnung 194 benötigt wird, größer als die Kraft, welche benötigt wird, um über die zweite schiefe Ebene 214 den Stift 196 in die Eintauchöffnung 194 zu bringen und die Verriegelung herzustellen und dadurch die Parkposition 185 zu erreichen.
- Ein alternatives Ausführungsbeispiel eines Stifts 196' (
Figur 14 ) weist an einer Spitze eine Anlagefläche 197 auf, welche konisch ausgebildet ist. Bei einer weiteren alternativen Ausführungsform ist der Stift an der Spitze kugelförmig ausgebildet (inFigur 14 in durchbrochenen Linien angedeutet). Der Stift 196 bzw. der Stift 196' ist insbesondere aus einem metallischen Material hergestellt. - Wenn außerhalb des Blockelements 208 der Stift 196 an dem entsprechenden Kreisbahnabschnitt 88 geführt wird, dann liegt vorzugsweise eine Spitze 218 zwischen der ersten Anlagefläche 212 und der zweiten Anlagefläche 216 an diesem Kreisbahnabschnitt 88 an.
- Oben wurde eine Ausführungsform beschrieben, bei der der entsprechende Stift 196 der Stift-Eintauchöffnung-Kombination 188 an dem gleichen Kreisbahnabschnitt 88 geführt wird wie die Gegeneinrichtung 90.
- Es ist auch möglich, dass ein Kreisbahnabschnitt 88 vorgesehen ist, welcher getrennt von diesem Kreisbahnabschnitt 88 für die Gegeneinrichtung 90 ist, aber konzentrisch zu der Schwenkachse 40 ist.
- Wenn die Verriegelungsstellung gemäß
Figur 12 erreicht ist, kann ein Bediener durch entsprechend hohen Kraftaufwand durch Ausübung eines Drehmoments auf die Haltestabeinrichtung 36 in Richtung zu dem zu reinigenden Boden 16, auf dem die Bodenreinigungsmaschine 10 über den Reinigungskopf 12 ordnungsgemäß aufgestellt ist, die Verriegelung aufheben und den entsprechenden Stift 196 aus der Eintauchöffnung 194 führen. Es ist dann die freie Schwenkbarkeit bis zu der unteren Grenze hin möglich. - Um die Parkposition 185 mit der Verriegelung durch Eintauchen des Stifts 196 in die Eintauchöffnung 194 zu erreichen, verschwenkt ein Bediener die Haltestabeinrichtung 36 um die Schwenkachse 40 zu der Parkposition 185 hin, bis die Parkposition 185 durch Einrasten des Stifts 196 in die zugeordnete Eintauchöffnung 194 erreicht ist. In
Figur 10 ist eine Zwischenstellung kurz vor Erreichen der Verriegelungsstellung gezeigt. - In den
Figuren 19(a) bis (e) sind unterschiedliche Schwenkstellungen der Haltestabeinrichtung 36 zu dem Reinigungskopf 12 gezeigt. - In
Figur 19(a) ist eine "Arbeits"-Schwenkstellung gezeigt. Der Schwenkwinkel 182 liegt zwischen der unteren Grenze und der oberen Grenze. Über die Bodenreinigungsmaschine 10 kann der zu reinigende Boden 16 bearbeitet werden, um einen Reinigungsvorgang durchzuführen. Ein Bediener passt den Schwenkwinkel 182 an seine Körpergröße an. Wenn ein Möbelstück oder dergleichen unterfahren werden soll, wird der Schwenkwinkel 182 verringert. - Der Bediener führt über die Haltestabeinrichtung 36 mit dem angepassten Schwenkwinkel 182 den Reinigungskopf 12 über den zu reinigenden Boden 16. Die Reinigungswalzeneinheit 18 rotiert um die Rotationsachse 46. Aufgrund der Rotationsrichtung 52 erfährt der Reinigungskopf 12 und damit die Bodenreinigungsmaschine 10 einen Vortrieb.
- Die Haltestabeinrichtung 36 ist direkt mit der Walzenaufnahme 106 und damit der Reinigungswalzeneinheit 18 verbunden. Bei einer Schwenkbewegung der Haltestabeinrichtung 36 um die Schwenkachse 40 wird die Reinigungswalzeneinheit 18 mit verschwenkt. Wenn diese an dem zu reinigenden Boden 16 abgestützt ist, dann rollt sie dadurch auf dem Boden 16 ab. Diese Bewegung ist der Rotation der Reinigungswalzeneinheit 18 um die Rotationsachse 46 überlagert und hat keine negative Auswirkung auf das Reinigungsergebnis oder dergleichen. Durch die Rotation der Reinigungswalzeneinheit 18 ist der Winkelbereich, den die Reinigungswalzeneinheit 18 in der gleichen Zeiteinheit wie während einer Schwenkbewegung durchläuft, sehr viel größer.
- Die Haltestabeinrichtung 36 ist direkt mit der Reinigungswalzeneinheit 18 verbunden und wirkt mit ihrem Gewicht direkt auf die Reinigungswalzeneinheit 18. Das Gewicht der Haltestabeinrichtung 36 drückt die Reinigungswalzeneinheit 18 mit den Walzenteilen 116, 118 gegen den zu reinigenden Boden 16. Die Haltestabeinrichtung 36 stellt über ihr Eigengewicht eine Anpresskraft der Reinigungswalzeneinheit 18 an den zu reinigenden Boden 16 bereit. Dadurch verbessert sich die Reinigungswirkung; die mechanische Einwirkung der Reinigungswalzeneinheit 18 auf den zu reinigenden Boden 16 wird verbessert. Die Schmutzablösefähigkeit der Bodenreinigungsmaschine 10 wird verbessert. Durch die beschriebene Ausbildung des Schwenkgelenks 84 als Orbitalschwenkgelenk ergibt sich ein großer Schwenkbereich zwischen der unteren Grenze und der oberen Grenze.
- Zum Abstellen der Bodenreinigungsmaschine 10 erhöht der Bediener den Schwenkwinkel 182, bis die Parkposition 185 erreicht ist (
Figur 19(b) ) und über die Verriegelungseinrichtung 186 die Haltestabeinrichtung 36 mit dem Reinigungskopf 12 verriegelt ist. In der Parkposition 185 kann die Haltestabeinrichtung 36 nicht von selber (aufgrund ihres Eigengewichts) "herunterfallen" unter Verkleinerung des Schwenkwinkels 182 in Richtung der unteren Grenze. - In der Parkposition 185 wird die Bodenreinigungsmaschine 10 beispielsweise zur Aufbewahrung abgestellt. Insbesondere ist es auch vorgesehen, dass in der Parkposition 185 über eine entsprechende Reinigungsstation oder Abstellstation (in den Figuren nicht gezeigt) ein automatisierter Reinigungsvorgang der Reinigungswalzeneinheit 18 und gegebenenfalls weiterer Teile des Reinigungskopfs 12 durchgeführt wird. Beispielsweise ist es auch möglich, an der entsprechenden Bodenstation eine Batterieeinrichtung aufzuladen, Reinigungsflüssigkeit an der Tankeinrichtung 50 für Reinigungsflüssigkeit nachzufüllen. Gegebenenfalls kann auch in der Bodenstation die Schmutzfluidtankeinrichtung 32 entleert werden.
- Ausgehend von der Parkposition 185 ergibt sich auch eine einfache Entfernbarkeit der Schmutzfluidtankeinrichtung 32 von dem Reinigungskopf 12 (
Figur 19(c), (d) ). - Bei ordnungsgemäß auf dem zu reinigenden Boden 16 aufgestelltem Reinigungskopf 12 übt der Bediener insbesondere über einen Fuß eine Kraft auf die Trittlasche 34 in Richtung des Bodens 16 aus. Diese Kraft ist in
Figur 19 mit dem Bezugszeichen 220 angedeutet. Er übt dann ein Drehmoment auf die Haltestabeinrichtung 36 aus, welche über die obere Grenze hinausgeht und weiterhin bestrebt ist, den Schwenkwinkel 182 zu vergrößern. Dieses Drehmoment wird so ausgeübt, dass gewissermaßen die Haltestabeinrichtung 36 auf den Boden 16 zu verschwenkt werden soll, aber von dem hinteren Ende 22 des Reinigungskopfs 12 weg auf das vordere Ende 20 zu. - Diese Drehmomentausübung erfolgt in der Parkposition 185, bei welcher die Haltestabeinrichtung 36 mit der Basis 30 durch die Verriegelungseinrichtung 186 verriegelt ist. Es lässt sich gegebenenfalls durch Spiel an den Spiel-Eintauchöffnung-Kombinationen 188 der Schwenkwinkel 182 noch etwas vergrößern. Wenn dieses Spiel ausgeschöpft ist, dreht sich der Reinigungskopf 12, welcher dann insbesondere noch über die Reinigungswalzeneinheit 18 an dem Boden 16 abgestützt ist, relativ zu der Schmutzfluidtankeinrichtung 32. Es erfolgt eine Anhebung der Basis 30 relativ zu der Schmutzfluidtankeinrichtung 32.
- Es erfolgt dadurch ein Auftauchen der Halter 154 aus den entsprechenden Aufnahmen 160. Die Verrastungsstellung wird gelöst und der Reinigungskopf 12 kann dann von der Schmutzfluidtankeinrichtung 32 entfernt werden (vergleiche
Figur 19(d) ). - Durch den Bedienereingriff an der Trittlasche 34 bleibt dabei die Schmutzfluidtankeinrichtung 32 an dem Boden 16. Über die Kraft 220 hat ein Bediener die Schmutzfluidtankeinrichtung 32 an dem Boden 16 fixiert.
- Es wird dadurch bei der Abnahme der Schmutzfluidtankeinrichtung 32 von dem Reinigungskopf 12 die Bewegung der Schmutzfluidtankeinrichtung 32 minimiert, und es wird weitgehend ein Schwappen von flüssigem Schmutzfluid in der Schmutzfluidtankeinrichtung 32 verhindert.
- Das Abnehmen der Schmutzfluidtankeinrichtung 32 von dem Reinigungskopf 12 wurde oben im Zusammenhang mit einer Drehmomentausübung, insbesondere Verschwenkung des Reinigungskopfs 12 zu dem Boden 16, beschrieben.
- Grundsätzlich ist es auch möglich, dass der Reinigungskopf 12 von der Schmutzfluidtankeinrichtung 32 durch Ziehen nach oben entfernt wird, wobei ein Bediener die Schmutzfluidtankeinrichtung 32 durch Kraftausübung auf die Trittlasche 34 an dem Boden 16 fixiert.
- In
Figur 19(d) ist eine Situation gezeigt, welche entsteht, nachdem die Schmutzfluidtankeinrichtung 32 von dem Reinigungskopf 12 gelöst wurde, entweder durch Schwenkanhebung oder durch direktes Ziehen nach oben. Es wird der Reinigungskopf 12 in der Haltestabeinrichtung 36 endgültig von der Schmutzfluidtankeinrichtung 32 entfernt. - In
Figur 19(e) ist eine Situation gezeigt, bei welcher der Reinigungskopf 12 wieder auf die Schmutzfluidtankeinrichtung 32 aufgesetzt wird, das heißt bei welcher die Schmutzfluidtankeinrichtung 32 an dem Reinigungskopf 12 fixiert wird. Dazu wird die Schmutzfluidtankeinrichtung 32 auf dem Boden 16 aufgesetzt. Gegebenenfalls fixiert ein Bediener die Schmutzfluidtankeinrichtung 32 an dem Boden 16 über Kraftausübung auf die Trittlasche 34. - Es wird dann der Reinigungskopf 12 von oben auf die Schmutzfluidtankeinrichtung 32 aufgesetzt, und zwar derart, dass der entsprechende Halter 154 in die zugehörige Aufnahme 60 an der Schmutzfluidtankeinrichtung 32 eingetaucht wird, bis eine Verrastung erreicht wird (und entsprechend dann das jeweilige zweite Element 166 in dem zugehörigen Aufnahmebereich 168 des ersten Elements 164 liegt).
- Das Aufsetzen des Reinigungskopfs 12 erfolgt vorzugsweise mit einer Parkposition 185 der Haltestabeinrichtung 36 zu dem Reinigungskopf 12, das heißt mit einer Verriegelung der Haltestabeinrichtung 36 an dem Reinigungskopf 12 durch die Verriegelungseinrichtung 186.
- Durch die entsprechende Ausbildung des ersten Flächenbereichs 172 und des zweiten Flächenbereichs 14 ist vorzugsweise eine größere Kraft zum Abnehmen der Schmutzfluidtankeinrichtung 32 von dem Reinigungskopf 12 (
Figuren 19(c) und (d) ) notwendig als zum Fixieren (Figur 19(e) ). - Grundsätzlich ist es so, dass ein Bediener die Abnahme der Schmutzfluidtankeinrichtung 32 von dem Reinigungskopf 12 und das Einsetzen der Schmutzfluidtankeinrichtung 32 in dem Reinigungskopf 12 handfrei durchführen kann, das heißt er muss dazu die Schmutzfluidtankeinrichtung 32 nicht anfassen. Insbesondere kann er die entsprechenden Vorgänge durch Anfassen und Halten der Haltestabeinrichtung 36 durchführen. Er muss sich auch dazu nicht bücken oder in die Kniee gehen.
- Das Abstreifelement 70 ist über den Halter 72 beweglich an dem Reinigungskopf 12 und an der Basis 30 angeordnet. In den
Figuren 28 bis 30 ist ein Ausführungsbeispiel eines Halters 72 gezeigt. Der Halter 72 weist eine Basis 222 auf. Die Basis 222 hat ein hinteres Ende 224 und ein vorderes Ende 226. Die Basis 222 ist zu dem vorderen Ende 226 hin breiter als an dem hinteren Ende 224; die Basis 222 hat einen ersten Bereich 228 und einen zweiten Bereich 230, wobei an dem ersten Bereich 228 das hintere Ende 224 liegt und an dem zweiten Bereich 230 das vordere Ende 226. - Über den ersten Bereich 228 ist der Halter 72 an der Basis 30 des Reinigungskopfs 2 schwenkbar gehalten. Der zweite Bereich 230 trägt das Abstreifelement 70 und ein Kammelement 232.
- An dem ersten Bereich 228 sind Wellenstummel 234 angeordnet, welche seitlich nach außen ragen. Es sind dabei gegenüberliegend Wellenstummel 234 vorgesehen, welche fluchtend ausgerichtet sind. Durch die Wellenstummel 234 wird ein Schwenkachse 236 definiert. Die Schwenkachse 236 ist bei an der Basis 30 fixiertem Halter 72 parallel zu der Schwenkachse 40 bzw. parallel zu der Rotationsachse 46. Sie ist parallel zu der Aufstellfläche 14.
- Es ist bei einer Ausführungsform vorgesehen, dass für die Reinigungswalzeneinheit 18 ein durchgehendes Abstreifelement 70 vorhanden ist, welches sowohl auf den ersten Walzenteil 116 als auch auf den zweiten Walzenteil 118 wirkt (
Figur 25(a) ). Insbesondere ist keine Ausnehmung oder dergleichen für das Mittelteil 114 vorgesehen. Das Abstreifelement 70 erstreckt sich kontinuierlich zwischen einem ersten stirnseitigen Ende 238 und einem gegenüberliegenden zweiten stirnseitigen Ende 240. - Bei einer Ausführungsform ist das Abstreifelement 70 als Steg an dem zweiten Bereich 230 angeordnet bzw. ausgebildet. Insbesondere ist dieser Steg einstückig mit dem zweiten Bereich 230 verbunden, das heißt einstückig mit dem Halter 72 verbunden.
- Das Kammelement 232 sitzt ebenfalls an dem Halter 72. Es wirkt auf die Reinigungswalzeneinheit 18 und dient zur Aufnahme von Haaren; das Kammelement 232 ist ein Haarkamm.
- Das Kammelement 232 umfasst mindestens eine Reihe 242 und insbesondere eine Mehrzahl von Reihen 242 an Pins 244. Benachbarte Pins 244 sind beabstandet zueinander. Ein Pin taucht in einen Besatz 246 (vergleiche beispielsweise
Figur 20 ) der Reinigungswalzeneinheit 18 ein, um gewissermaßen Haare aus der Reinigungswalzeneinheit 18 "auszufiltern". - In
Figur 20 ist das Eintauchen in den Besatz 246 über eine Länge 248 des Pins 244 gezeigt. - Es ist ebenfalls vorgesehen, dass das Abstreifelement 70 in den Besatz 246 eintaucht.
- Bezogen auf die Rotationsrichtung 52 (vergleiche
Figur 3 ) ist das Kammelement 232 dem Abstreifelement 70 nachgeordnet. Ein Bereich der Reinigungswalzeneinheit 18, welcher ausgehend von dem Boden 16 in der Rotationsrichtung 52 rotiert, kommt zuerst an dem Abstreifelement 70 und dann an dem Kammelement 232 vorbei. Es ergibt sich so eine platzoptimierte Anordnung. - Das Kammelement 232 (die Reihen 242) sind an dem zweiten Bereich 230 zwischen dem vorderen Ende 226 und dem Abstreifelement 70 angeordnet (vergleiche
Figur 30 ). - Bei dem gezeigten Ausführungsbeispiel gemäß den
Figuren 28 bis 30 erstreckt sich das Kammelement 232 über eine geringere Querlänge als das Abstreifelement 70, das heißt ein Abstand zwischen den äußeren Enden des Kammelements 232 ist kleiner als ein Abstand zwischen den stirnseitigen Enden 238 und 240 des Abstreifelements 70 (Figur 30 ). - Der Halter 72 ist an der Basis 30 schwenkbeweglich gehalten. Er ist federbeaufschlagt, um das Abstreifelement 70 und das Kammelement 232 in den Besatz 246 zu drücken. Es ist eine entsprechende Federeinrichtung vorgesehen, welche beispielsweise im Bereich der Wellenstummel 234 an dem entsprechenden Schwenklager 250 angeordnet ist. Dies ist in
Figur 20 durch das Bezugszeichen 252 angedeutet. - Es ist alternativ oder zusätzlich möglich, dass sich beispielsweise eine entsprechende Spiralfeder der Federeinrichtung an der Basis 30 und an dem zweiten Bereich des Halters 72 abstützt, um diesen gegen die Reinigungswalzeneinheit 18 zu drücken.
- Wie oben erwähnt ist das Abstreifelement 70 als Steg 254 an dem zweiten Bereich 30 angeordnet. Dieser Steg 254 weist eine erste Flanke 256 auf, welche der Mündungsöffnung 56 zugewandt ist. Er weist eine gegenüberliegende zweite Flanke 258 auf, welche der Mündungsöffnung 56 abgewandt ist (
Figur 20 ). Die zweite Flanke 258 ist dem Kammelement 232 zugewandt. Zwischen der ersten Flanke 256 und der zweiten Flanke 258 liegt eine Kante 260. Durch die Kante 260 ist eine Kontaktlinie 262 (Figur 25 ) gebildet. Diese entspricht dem Kantenverlauf und kann durch eine mathematische Kurve beschrieben werden. - Der Steg 254 des Abstreifelements 70 hat über die erste Flanke 256 und die zweite Flanke 258 im Querschnitt eine Dreiecksform (vergleiche
Figur 20 ). Die Kontaktline 262 hat eine endliche Breite. - Die Kontaktlinie 262 liegt im Besatz 246 (vergleiche
Figur 20 ) oder liegt zumindest an dem Besatz 246 an. Über die Kontaktlinie 262 erfolgt ein Anliegen bzw. Eintauchen des Abstreifelements 70 an bzw. in den Besatz 246. - Das Abstreifelement 70 ist als Leitelement für Schmutzfluid an der Reinigungswalzeneinheit 18 ausgebildet. Die Ausbildung ist bei einer Ausführungsform (
Figur 25(a) ) derart, dass Schmutzfluid über das Abstreifelement 70 nicht nur von der Reinigungswalzeneinheit 18 (von dem Besatz 246) abgelöst wird, sondern auch definiert zu einem mittleren Bereich 264 geführt wird. Dieser mittlere Bereich 264 liegt an der Reinigungswalzeneinheit 18 und an dem Abstreifelement 70. Von dem mittleren Bereich 264 ausgehend wird Schmutzfluid (zu einem überwiegenden Anteil) in die Mündungsöffnung 56 eingekoppelt. Der mittlere Bereich 264 liegt an der Mittelebene 94. - Das Abstreifelement 70 ist gekrümmt ausgebildet. Die Kontaktlinie 262 weist eine erste Länge L1 (Bogenlänge) zwischen dem ersten stirnseitigen Ende 238 und dem zweiten stirnseitigen Ende 240 auf.
- Ein Abstand D zwischen dem ersten stirnseitigen Ende 238 und dem zweiten stirnseitigen Ende 240, wobei eine Abstandsrichtung für den Abstand D parallel zu der Schwenkachse 236 bzw. parallel zu der Schwenkachse 40 bzw. parallel zu der Rotationsachse 46 ist, ist kleiner als diese Länge L1.
- Bei einem Ausführungsbeispiel weist die Reinigungswalzeneinheit 18 (als Kombination aus erster Reinigungswalze 116 und zweiter Reinigungswalze 118 mit Abstand dazwischen) in der Abstandsrichtung (also parallel zur Rotationsachse 46) eine zweite Länge
- L2 auf (vergleiche
Figur 4 ), welche kleiner ist als die Länge L1. - Die Krümmung des Abstreifelements 70 an der Kontaktlinie 262 kann zweidimensional oder dreidimensional sein in dem Sinne, dass eine mathematische Kurve, welche den Verlauf der Kontaktlinie 262 beschreibt und eine gekrümmte Kurve ist, eine ebene Kurve sein kann (zweidimensionale Krümmung) oder eine Raumkurve (dreidimensionale Krümmung) sein kann.
- Insbesondere weist dann mathematisch die entsprechende Kurve, welche mathematisch den Verlauf der Kontaktlinie 262 beschreibt, eine erste Krümmung (im Sinne einer differentialgeometrischen Krümmung) auf, oder weist eine erste Krümmung und eine zweite Krümmung auf.
- Insbesondere ist die erste Krümmung negativ, das heißt die entsprechende mathematische Kurve, welche den Verlauf der Kontaktlinie 262 beschreibt, ist konkav, oder die erste Krümmung und die zweite Krümmung sind jeweils negativ und die entsprechende Kurve ist eine konkave Kurve.
- Durch die Mündungseinrichtung 54 ist ein Abgabebereich für Schmutzfluid von der Reinigungswalzeneinheit 18 in die Schmutzfluidtankeinrichtung 32 gebildet. Die Kontaktlinie 262 ist zu diesem Abgabebereich hin, also zu der Mündungsöffnung 56 hin, konkav ausgebildet. Diese konkave Ausbildung liegt an der ersten Flanke 256.
- An der zweiten Flanke 258, das heißt dem Abgabebereich (der Mündungsöffnung 56) abgewandt liegt eine konvexe Ausbildung vor. Ein entsprechender konkaver Bereich 266 und ein konvexer Bereich 268 sind in
Figur 25 gezeigt. - Bei einer Ausführungsform weist die Kontaktlinie 262 die Form eines Kreisbogenabschnitts auf. Die entsprechende mathematische Kurve, welche den Verlauf der Kontaktlinie 262 beschreibt, weist eine konstante Krümmung auf.
- Es kann dabei insbesondere eine erste Krümmung vorgesehen sein, welche konstant ist, und falls die Kontaktlinie 262 durch eine Raumkurve beschreibbar ist, kann eine konstante zweite Krümmung vorliegen.
- Es ist insbesondere vorgesehen, dass ein Krümmungsradius R im Bereich zwischen 2L2 und 6L2 liegt (2L2 < R < 6L2).
- Das Abstreifelement 70 weist über die Kontaktlinie 262 einen Scheitel 270 auf, welcher bei einer Ausführungsform (vgl.
Figur 25(a) ) an der Mittelebene 94 angeordnet ist. Der Verlauf der mathematischen Kurve, welche den Verlauf der Kontaktlinie 262 beschreibt, kann in Zylinderkoordinaten beschrieben werden. Es kann eine Projektion der Kontaktlinie 262 auf einen (gedachten) Zylinder 272 (Figur 25(a) ) mit einer Zylinderachse 274 betrachtet werden. Die Kontaktlinie 262 ist bezogen auf den Scheitel 270 bzw. die Mittelebene 94 spiegelsymmetrisch ausgebildet (Figur 25(a) ). Ein Polarwinkel ϕ variiert längs des Kurvenverlaufs. An dem Scheitel 270 (Punkt B gemäßFigur 25(a) ) liegt ein maximaler Polarwinkel ϕ s vor, und ausgehend von diesem Scheitel 270 nimmt der Polarwinkel ϕ s ab. Er nimmt dabei jeweils zu den stirnseitigen Enden 238, 240 auf die gleiche Weise ab und insbesondere kontinuierlich stetig. Insbesondere liegt auch eine monotone Abnahme vor. - Es kann dabei auch vorgesehen sein, dass ein Abstand dieser Kurve zu der Zylinderachse 274 abnimmt.
- In
Figur 21 ist ein Schnitt durch den Reinigungskopf 12 an dem Punkt A gemäßFigur 25 gezeigt, und inFigur 22 ein Schnitt an dem Punkt B (das heißt an dem Scheitel 270). - Zwischen der ersten Flanke 256 und einer Ebene 276, welche parallel zur Aufstellfläche 14 ist, liegt ein Winkel. An dem Punkt A gemäß
Figur 21 beträgt dieser Winkel α. An dem Scheitel 270 gemäßFigur 22 beträgt dieser Winkel β, wobei β größer ist als α. An dem Punkt B ragt das Abstreifelement 70 weniger weit in den Besatz 246 als an dem Punkt A (vergleicheFiguren 17 und16 ). Dies ist durch die entsprechende Krümmung an der Kontaktlinie 262 bewirkt. - Es ist insbesondere vorgesehen, dass die Mündungsöffnung 56 längs des Abstreifelements 70 eine dritte Länge L3 aufweist, welche kleiner ist als die erste Länge L1. Durch die Leitfunktion des Abstreifelements 70 wird Schmutzfluid in den Abgabebereich (zu der Mündungsöffnung 56 hin) auch an der Reinigungswalzeneinheit 18 transportiert. Es genügt dann eine kleinere Mündungsöffnung 56. Dadurch wiederum wird der Verschmutzungsbereich an der Bodenreinigungsmaschine 10 verringert.
- An der Reinigungswalzeneinheit 18 ergibt sich auf der Oberfläche der Reinigungswalzeneinheit 18 und auch in einem Eindringbereich des Abstreifelements 70 aufgrund der Krümmung des Abstreifelements 70 ein Leitbereich für Schmutzfluid, über welchen Schmutzfluid an der Reinigungswalzeneinheit 18 mittels Abstreifelement 70 zu dem mittleren Bereich 264 geleitet wird. Dadurch lässt sich der Abgabebereich bezogen auf die Abstandsrichtung parallel zur Rotationsachse 46 kleiner ausbilden, das heißt die Mündungsöffnung 56 lässt sich mit kleinerer Länge L3 ausbilden als beispielsweise bei einem geraden Abstreifelement 70. Es ist dadurch ein kleinerer Übergabebereich für Schmutzfluid an die Schmutzfluidtankeinrichtung 32 realisierbar. Es wird die Schmutzfluidabgabe vereinfacht und die Geräteverschmutzung reduziert.
- Weiterhin wird eventuell auftretender Schaum an der Reinigungswalzeneinheit 18 zu dem mittleren Bereich 264 durch das Abstreifelement 70 geführt. Dadurch wird das Schaumaustreten an stirnseitigen Enden der Reinigungswalzeneinheit 18 vermindert oder zumindest stark reduziert.
- Bei dem Ausführungsbeispiel gemäß
Figur 25(a) wurde ein Abstreifelement 70 beschrieben, welches der Reinigungswalzeneinheit 18 mit erstem Walzenteil 116 und zweitem Walzenteil 118 zugeordnet ist und bei welchem der Scheitel 270 an einer Mittelebene angeordnet ist. - In
Figur 25(b) ist ein alternatives Ausführungsbeispiel gezeigt mit einem Abstreifelement, welches nicht durchgehend ausgebildet ist. Jedem Walzenteil 116 bzw. 118 ist ein eigenes Abstreifelement zugeordnet, wobei insbesondere diese Abstreifelemente an einem einzigen Halter (dem Halter 72) angeordnet sind. - In
Figur 25 ist eine Kontaktlinie 262' für den Beispielsfall des ersten Walzenteils 116 gezeigt. - Der erste Walzenteil weist eine Länge L2* auf.
- Diese Länge L2* liegt zwischen den entsprechenden stirnseitigen Enden des ersten Walzenteils 116 (bzw. des zweiten Walzenteils 118).
- Das entsprechende Kantenelement weist den Kantenverlauf 262' auf, welcher symmetrisch ist. Bei dem gezeigten Ausführungsbeispiel ist das entsprechende Abstreifelement, welches dem ersten Walzenteil 116 (bzw. dem zweiten Walzenteil 118) zugeordnet ist, kreisförmig gekrümmt, wobei ein Krümmungsradius R* insbesondere im Bereich zwischen 2L2* und 6L2* liegt (2L2* < R* < 6L2*).
- Es wird dadurch insbesondere eine Ableitung von Schmutzfluid des entsprechenden Walzenteils 116 bzw. 118 erreicht.
- Bezogen auf die Reinigungswalzeneinheit 18 hat die Kombination der Abstreifelemente eine "Doppelhöcker-Form", wobei in der Kombination die entsprechenden Abstreifelemente dann beabstandet sein können oder durchgehend sein können.
- Es ist grundsätzlich auch möglich, dass der entsprechende gekrümmte Verlauf des Abstreifelements 70, wie in den
Figuren 26 und 27 angedeutet, asymmetrisch ist und kein Scheitel oder kein Scheitel an einer Mittelebene vorliegt. Es kann dazu insbesondere eine gezielte Ableitung von Schmutzfluid zu einer Seite 310 (Figur 26 ) oder zu einer Seite 312 (Figur 27 ) erfolgen. - Es ist dabei grundsätzlich möglich, dass der Verlauf des Abstreifelements 70, wie in den
Figuren 26 und 27 angedeutet, auf die Reinigungswalzeneinheit 18 als Ganzes mit Kombination aus erstem Walzenteil 116 und zweitem Walzenteil 118 ist, oder bezogen auf nur einen Walzenteil 116 bzw. 118 ist. - Bezogen auf die Reinigungswalzeneinheit 18 mit erstem Walzenteil 116 und zweitem Walzenteil 118 ist der Verlauf gemäß
Figuren 26 oder 27 asymmetrisch. Wenn beispielsweise für den ersten Walzenteil 116 der Verlauf gemäßFigur 26 vorliegt und für den zweiten Walzenteil 118 der Verlauf gemäßFigur 27 , ist der Gesamtverlauf bezogen auf die Reinigungswalzeneinheit 18 mit erstem Walzenteil 116 und zweitem Walzenteil 118 symmetrisch. Bei dieser Ausführungsform erfolgt insbesondere eine Ableitung nach außen. - Es kann auch umgekehrt vorgesehen sein, dass die Ableitung nach innen erfolgt und die Rollen der Walzenteile 116 und 118 vertauscht sind.
- Grundsätzlich ist die Ausführungsform des gekrümmten Abstreifelements auch möglich, wenn die Reinigungswalzeneinheit nur ein Walzenteil aufweist.
- Die Ausbildung des Abstreifelements 70 mit einer Krümmung wurde anhand der Bodenreinigungsmaschine 10 beschrieben. Diese Lösung der gekrümmten Ausbildung lässt sich auch an anderen Arten von Flächenreinigungsmaschinen einsetzen wie beispielsweise an einer selbstfahrenden und selbstlenkenden Reinigungsmaschine (Reinigungsroboter).
- Die erfindungsgemäße Bodenreinigungsmaschine 10 funktioniert wie folgt:
Für einen Reinigungsbetrieb ist der Reinigungskopf 12 auf dem zu reinigenden Boden 16 aufgestellt. Ein Bediener führt den Reinigungskopf 12 über die Haltestabeinrichtung 36 über den zu reinigenden Boden 16. Nach Anschalten rotiert die Reinigungswalzeneinheit 18 um die Rotationsachse 46, wobei der Antrieb über den Antriebsmotor 98 erfolgt. - Bei einem Wischbetrieb (Nassreinigungsbetrieb) erfolgt eine Zuführung von Reinigungsflüssigkeit aus der Tankeinrichtung 50 für Reinigungsflüssigkeit insbesondere auf die Reinigungswalzeneinheit 18.
- Der zu reinigende Boden 16 wird dadurch angefeuchtet zur besseren Schmutzlösung. Schmutz wird mitgenommen und über die Reinigungswalzeneinheit 18 zum Abstreifelement 70 transportiert. Schmutzfluid, welches dann insbesondere Flüssigkeit mit Schmutzpartikeln ist, wird von der Reinigungswalzeneinheit 18 abgelöst und in die Schmutzfluidtankeinrichtung 32 befördert.
- Durch die Leitelementfunktion des Abstreifelements 70 aufgrund der entsprechenden Krümmung ergibt sich eine vereinfachte Schmutzfluidabgabe.
- Es kann auch Grobschmutz aufgenommen werden. Das Kehrelement 62 sorgt für eine Zuführung von Grobschmutz der Reinigungswalzeneinheit 18. Diese transportiert den Grobschmutz direkt in die Schmutzfluidtankeinrichtung 32 und/oder es erfolgt eine Ablösung über das Abstreifelement 70.
- Über das Kammelement 232 werden Haare von der Reinigungswalzeneinheit 18 gelöst.
- Es ist grundsätzlich auch ein reiner Kehrbetrieb ohne Befeuchtung mit Reinigungsflüssigkeit möglich. Insbesondere kann dann ein Bediener an einem Bedienungspaneel einstellen, dass keine Befeuchtung erfolgen soll.
- Insbesondere zu einem Nassreinigungsbetrieb wird die Reinigungswalzeneinheit 18 verwendet, bei welcher der Besatz 246 ein textiles Material ist. Die Reinigungswalzeneinheit 18 kann auch für einen Kehrvorgang verwendet werden.
- Es ist auch möglich, dass beispielsweise für einen Kehrvorgang die Reinigungswalzeneinheit 18 ausgetauscht wird und eine Reinigungswalzeneinheit verwendet wird, bei welcher der Besatz Borsten sind.
- Durch die Bodenreinigungsmaschine 10 ist je nach Bedarf eine reine Trockenreinigung oder eine Nassreinigung möglich.
- Durch das Orbitalgelenk 84 stützt sich die Haltestabeinrichtung 36 an der Reinigungswalzeneinheit 18 ab und es wird eine entsprechende Anpresskraft auf den zu reinigenden Boden 16 ausgeübt. Dadurch wird die mechanische Einwirkung der Reinigungswalzeneinheit 18 auf den zu reinigenden Boden 16 verstärkt, und die Schmutzablösefähigkeit und Schmutzaufnahmefähigkeit der Bodenreinigungsmaschine 10 wird verbessert.
- Durch diese erwähnte Ausbildung des Schwenkgelenks 84 erfährt die Reinigungswalzeneinheit 18 über die Haltestabeinrichtung 36 einen maximalen Anpressdruck über die Bodenreinigungsmaschine 10 selber.
- Die Schmutzfluidtankeinrichtung 32 bleibt stets in der gleichen Lage zu dem zu reinigenden Boden 16. Dadurch lässt sich auch das Kehrelement 62 in der gleichen Lage zu dem Boden 16 halten. Dies ergibt eine verbesserte Grobschmutzaufnahme und insgesamt eine verbesserte Reinigung.
- Es ergibt sich eine vereinfachte Bedienbarkeit über die Schwenkbarkeit der Haltestabeinrichtung 36 an dem Reinigungskopf 12. Es ergibt sich eine gute Unterfahrbarkeit von Möbeln und dergleichen.
- Durch das Vorsehen der Trittlasche 34 und durch die Parkposition 185 kann die Schmutzfluidtankeinrichtung 32 auf einfache Weise von dem Reinigungskopf 12 abgenommen werden bzw. der Reinigungskopf 12 lässt sich auf einfache Weise auf die Schmutzfluidtankeinrichtung 32 aufsetzen. Insbesondere muss ein Bediener nicht mit seinen Händen die Schmutzfluidtankeinrichtung 32 anfassen, um diese abzunehmen bzw. um diese einzusetzen.
- Durch die Ausbildung des Schwenkgelenks 84 als Orbitalgelenk ist es sichergestellt, dass sich bei jeder Schwenkposition der Haltestabeinrichtung 36 zu dem Reinigungskopf 12 um die Schwenkachse 40 innerhalb des Schwenkwinkelbereichs dennoch die Schmutzfluidtankeinrichtung 32 stets die gleiche Lage zu dem Boden 16 einnimmt und dabei parallel zum Boden 16 verbleibt.
- In der Parkposition 185 ist eine Verriegelung erreicht und die Bodenreinigungsmaschine 10 ist in einer stabilen Lage, das heißt die Haltestabeinrichtung 36 ist arretiert und die Bodenreinigungsmaschine 10 "fällt nicht von selber um".
- Durch das mindestens eine Abstützelement 120, welches an der Basis 30 (und nicht an der Schmutzfluidtankeinrichtung 32) angeordnet ist, ergibt sich eine optimierte Abstützung des Gewichts des Reinigungskopfs 12 mit der Schmutzfluidtankeinrichtung 32 an dem zu reinigenden Boden 16. Es lässt sich eine Schmutzfluidtankeinrichtung 32 mit relativ großem Aufnahmevolumen für Schmutzfluid realisieren.
- Bei einem Ausführungsbeispiel (
Figuren 15 bis 18 ) ist an der Haltestabeinrichtung 36 insbesondere bezogen auf den Handgriff 38 eine Drehbarkeit um die Drehachse 41 vorgesehen. - Dazu umfasst die Haltestabeinrichtung 36 einen ersten Teil 278 und einen zweiten Teil 280, wobei der zweite Teil 280 um die Drehachse 41 relativ zu dem ersten Teil 278 drehbar ist.
- Bei einem Ausführungsbeispiel fällt der erste Teil 278 mit dem ersten Bereich 76 zusammen und der zweite Teil 280 fällt mit dem zweiten Bereich 78 der Haltestabeinrichtung 36 zusammen.
- Bei einem Ausführungsbeispiel ist die Drehsache 41 koaxial zu der ersten Längsachse 80. Grundsätzlich ist es aber auch möglich, dass die Drehachse 41 beispielsweise parallel zur zweiten Längsachse 42 ist. Im Nachfolgenden wird ein Ausführungsbeispiel beschrieben, in welchem die Drehachse 41 parallel zur ersten Längsachse 80 ist.
- Bei der Drehung um die Drehachse 41 drehen sich insbesondere der Antriebsmotor 98 und die Getriebeeinrichtung 104 nicht mit. Diese sind an dem ersten Teil 278 angeordnet.
- Es ist eine Verriegelungseinrichtung 282 vorgesehen (
Figuren 15 bis 18 ), welche zum einen außerhalb einer Verriegelungsstellung 284 die Drehbarkeit des zweiten Teils 280 zu dem ersten Teil 278 (des zweiten Bereichs 78 zu dem ersten Bereich 76) freigibt (Figuren 15 ,16 ) und in der Verriegelungsstellung 284 die Drehbarkeit des zweiten Teils 280 der Haltestabeinrichtung 36 zu dem ersten Teil 278 der Haltestabeinrichtung 36 um die Drehachse 41 sperrt (Figuren 17 ,18 ). - Bei den Darstellungen gemäß den
Figuren 15 bis 18 ist eine Verkleidung 386 (vergleicheFigur 4 ) abgenommen zur Erläuterung der Wirkungsweise der Verriegelungseinrichtung 284. - Die Verriegelungseinrichtung 284 umfasst einen Schieber 288, welcher beweglich und insbesondere linearbeweglich an dem ersten Teil 278 (an dem ersten Bereich 76) angeordnet ist. Eine Verschiebungsachse 289 ist dabei insbesondere parallel zur Drehachse 41.
- Der Schieber 288 weist im Bereich eines ersten Endes eine Nase 290 (vergleiche beispielsweise
Figur 16 ) auf. Über diese Nase 290 kann sich der Schieber 288 an dem Reinigungskopf 12 und dort an einer entsprechenden Gegenfläche 292 abstützen. Außerhalb der Parkposition 185 ist dabei die Nase 290 zu der Gegenfläche 292 beabstandet. Wenn die Parkposition 185 erreicht ist, dann wirkt die Nase 290 auf die Gegenfläche 292 und dies bewirkt eine Verschiebung des Schiebers 288 in der Verschiebungsrichtung 289. Der Schieber 288 ist federgestützt und dabei über eine Federeinrichtung 294 an dem ersten Teil 278 gelagert. Die Federeinrichtung ist so angeordnet und ausgelegt, dass sie den Schieber 288 mit der Nase 290 in Richtung des Reinigungskopfes 12 drückt. Für eine Bewegung des Schiebers 288 in der Gegenrichtung (von dem Reinigungskopf 12 weg) muss die Federkraft der Federeinrichtung 294 überwunden werden. Diese Überwindung der Federkraft der Federeinrichtung 294 liegt vor, wenn die Parkposition 185 erreicht ist. Durch der Abstützen der Nase 290 auf der Gegenfläche 292 wird der Schieber 288 als Ganzes in Richtung des zweiten Teils 280 verschoben. - An einem dem Ende, an welchem die Nase 290 sitzt, gegenüberliegenden Ende weist der Schieber 288 ein Eintauchelement 296 auf. Das Eintauchelement 296 kann in der Parkposition 185 in eine entsprechende Eintauchöffnung 298 des zweiten Teils 280 eintauchen. Dadurch ist ein Formschluss bezüglich der Drehbarkeit um die Drehachse 41 erreicht und der zweite Teil 280 der Haltestabeinrichtung 36 (der zweite Bereich 78) kann sich nicht mehr gegenüber dem ersten Teil 278 (dem ersten Bereich 76) um die Drehachse 41 drehen.
- Wenn die Haltestabeinrichtung 36 in die Parkposition 185 gebracht wird, dann wird der Schieber 288 als Ganzes in Richtung des zweiten Teils 280 geschoben und das Eintauchelement 296 taucht in die Eintauchöffnung 298 ein (bei entsprechender Ausrichtung des zweiten Teils 280 zu dem ersten Teil 278) und in der entsprechenden Verriegelungsstellung 284 ist die Drehbarkeit des zweiten Teils 280 zu dem ersten Teil 278 um die Drehachse 41 gesperrt.
- Außerhalb der Parkposition 185 wirkt die Federeinrichtung 294 derart auf den Schieber 288, dass es diesen in Richtung des Reinigungskopfes 12 verschiebt bzw. dort hält. Das Eintauchelement 296 ist dabei dann aus der Eintauchöffnung 298 ausgetaucht und außerhalb der Verriegelungsstellung 284 ist das zweite Teil 280 zu dem ersten Teil 278 um die Drehachse 41 drehbar.
- Die Verriegelungseinrichtung 284 weist einen Überlastschutz 300 auf. Dieser Überlastschutz 300 dient im Wesentlichen dazu, Beschädigungen bei einer Verdrehung in der Parkposition 185 um die Drehachse 41 zu verhindern.
- Bei einem Ausführungsbeispiel ist der Schieber 288 (mindestens) zweiteilig ausgebildet mit einem ersten Teil 302 und einem zweiten Teil 304. An dem ersten Teil 302 sitzt die Nase 290. An dem zweiten Teil 304 sitzt das Eintauchelement 296.
- Das zweite Teil 304 ist verschieblich an dem ersten Teil 302 gelagert, wobei eine Abstützung über eine Federeinrichtung 306 vorliegt.
- Insbesondere ist die Federeinrichtung 306 "hart" im Vergleich zu der Federeinrichtung 294 und insbesondere wesentlich härter als die Federeinrichtung 294.
- In einem "Normalzustand" wirkt die Federkraft der Federeinrichtung 306 derart, dass sie das zweite Teil 304 von dem ersten Teil 302 weg schiebt, bis ein Anschlag 308 (vergleiche beispielsweise
Figur 16 ) des zweiten Teils 304 an dem ersten Teil 302 erreicht ist. In diesem Zustand ist der Schieber 288 als Ganzes mit dem ersten Teil 302 und dem zweiten Teil 304 in der Verschiebungsrichtung 289 beweglich. Der Schieber 288 mit dem ersten Teil 302 und dem zweiten Teil 304 kann entsprechend in der Parkposition 185 die Verriegelungsstellung 284 erreichen und außerhalb der Parkposition 185 außerhalb der Verriegelungsstellung 284 liegen und die Drehbarkeit des zweiten Teils 280 zu dem ersten Teil 278 um die Drehachse 41 ermöglichen. - In der Verriegelungsstellung 284 kann der Schieber 288 bezogen auf die Verschiebungsrichtung 289 nicht ausweichen bzw. höchstens mit gewissem Spiel ausweichen. Eine Bewegungssperre zu dem Reinigungskopf 12 hin ist durch die Nase 290 bewirkt. Zu dem zweiten Teil 280 ist diese Bewegungssperre durch das in die Eintauchöffnung 298 eingetauchte Eintauchelement 296 erreicht.
- Wenn eine große Kraft und insbesondere ein entsprechendes Drehmoment auf das zweite Teil 280 zu dem ersten Teil 278 ausgeübt wird, dann kann der Schieber 288 nicht als Ganzes in der Verschiebungsrichtung 289 ausweichen. Durch die mehrteilige Ausbildung des Schiebers 288 kann sich aber das zweite Teil 304 relativ zu dem ersten Teil 302 unter Überwindung der Federkraft der Federeinrichtung 306 bewegen, und kann sich vom Anschlag 308 weg bewegen. Dadurch kann sich insbesondere das Eintauchelement 296 aus der Eintauchöffnung 298 heraus bewegen. Es wird dadurch die Beschädigungsgefahr verringert, da ein Ausweichen ermöglicht ist.
-
- 10
- Bodenreinigungsmaschine
- 12
- Reinigungskopf
- 14
- Aufstellfläche
- 16
- zu reinigender Boden
- 18
- Reinigungswalzeneinheit
- 20
- vorderes Ende
- 22
- hinteres Ende
- 24
- Längsachse
- 26
- erste laterale Seite
- 28
- zweite laterale Seite
- 30
- Basis
- 32
- Schmutzfluidtankeinrichtung
- 34
- Trittlasche
- 36
- Haltestabeinrichtung
- 38
- Handgriff
- 40
- Schwenkachse
- 41
- Drehachse
- 42
- zweite Längsachse
- 44
- Drehbarkeit
- 46
- Rotationsachse
- 48, 48'
- Batteriehalter
- 50
- Tankeinrichtung für Reinigungsflüssigkeit
- 52
- Rotationsrichtung
- 54
- Mündungseinrichtung
- 56
- Mündungsöffnung
- 58
- Boden
- 60
- Wandung
- 62
- Kehrelement
- 64
- Grobschmutz
- 66
- Zuführungseinrichtung
- 68
- Befeuchtung
- 70
- Abstreifelement
- 72
- Halter
- 74
- Schmutzfluid
- 76
- erster Bereich
- 78
- zweiter Bereich
- 80
- erste Längsachse
- 82
- stumpfer Winkel
- 84
- Schwenkgelenk
- 86
- Bahnführungseinrichtung
- 88
- Kreisbahnabschnitt
- 90
- Gegeneinrichtung
- 92
- Höhenachse
- 94
- Mittelebene
- 98
- Antriebsmotor
- 100
- Gehäuse
- 102
- Freiraum
- 104
- Getriebeeinrichtung
- 106
- Walzenaufnahme
- 108
- Welle
- 110
- erster Wellenteil
- 112
- zweiter Wellenteil
- 114
- Mittelteil
- 116
- erster Walzenteil
- 118
- zweiter Walzenteil
- 120
- Abstützelement
- 122
- Pfosten
- 124
- Rolle, Gleiter
- 126
- Unterseite [der Basis]
- 127
- Unterseite [der Schmutzfluidtankeinrichtung]
- 128
- Oberseite
- 130
- Wandung
- 132
- Ausschnitt
- 134
- erster Öffnungsteil
- 136
- zweiter Öffnungsteil
- 138
- erste Kammer
- 140
- zweite Kammer
- 142
- Deckel
- 144
- Platte
- 146
- Randwandung
- 148
- Entnahmerichtung
- 150
- Raum
- 152
- durchgehende Ausnehmung
- 154
- Halter
- 156
- erste Stelle
- 158
- zweite Stelle
- 160
- Aufnahme
- 162
- Halter-Aufnahme-Kombination
- 164
- erstes Element
- 166
- zweites Element
- 168
- Aufnahmebereich
- 170
- Wulst
- 172
- erster Flächenbereich
- 174
- zweiter Flächenbereich
- 176
- erster Konuswinkel
- 178
- zweiter Konuswinkel
- 180
- Erweiterung
- 182
- Schwenkwinkel
- 184
- Unterseite
- 185
- Parkposition
- 186
- Verriegelungseinrichtung
- 188
- Stift-Eintauchöffnung-Kombination
- 190
- erste Stelle
- 192
- zweite Stelle
- 194
- Eintauchöffnung
- 196, 196'
- Stift
- 197
- Anlagefläche
- 198
- Führung
- 200
- Verschiebungsachse
- 202
- Federeinrichtung
- 204
- Wulst
- 206
- Anschlag
- 208
- Blockelement
- 210
- erste schiefe Ebene
- 212
- erste Anlagefläche
- 214
- zweite schiefe Ebene
- 216
- zweite Anlagefläche
- 218
- Spitze
- 220
- Kraft
- 222
- Basis
- 224
- hinteres Ende
- 226
- vorderes Ende
- 228
- erster Bereich
- 230
- zweiter Bereich
- 232
- Kammelement
- 234
- Wellenstummel
- 236
- Schwenkachse
- 238
- erstes stirnseitiges Ende
- 240
- zweites stirnseitiges Ende
- 242
- Reihe
- 244
- Pin
- 246
- Besatz
- 248
- Länge
- 250
- Schwenklager
- 252
- Federeinrichtung
- 254
- Steg
- 256
- erste Flanke
- 258
- zweite Flanke
- 260
- Kante
- 262, 262'
- Kontaktlinie
- 264
- mittlerer Bereich
- 266
- konkaver Bereich
- 268
- konvexer Bereich
- 270
- Scheitel
- 272
- Zylinder
- 274
- Zylinderachse
- 276
- Ebene
- 278
- erster Teil
- 280
- zweiter Teil
- 282
- Verriegelungseinrichtung
- 284
- Verriegelungsstellung
- 286
- Verkleidung
- 288
- Schieber
- 289
- Verschiebungsrichtung
- 290
- Nase
- 292
- Gegenfläche
- 294
- Federeinrichtung
- 296
- Eintauchelement
- 298
- Eintauchöffnung
- 300
- Überlastschutz
- 302
- Erster Teil
- 304
- Zweiter Teil
- 306
- Federeinrichtung
- 308
- Anschlag
- 310
- Seite
- 312
- Seite
- L1
- erste Länge
- L2, L2*
- zweite Länge
- L3
- dritte Länge
- D
- Abstand
Claims (20)
- Bodenreinigungsmaschine, umfassend einen Reinigungskopf (12), eine Haltestabeinrichtung (36), welche mit dem Reinigungskopf (12) verbunden ist, mindestens eine Reinigungswalzeneinheit (18), welche an dem Reinigungskopf (12) angeordnet ist, eine Schmutzfluidtankeinrichtung (32), welche abnehmbar an einer Basis (30) des Reinigungskopfs (12) angeordnet ist, und mindestens ein Abstützelement (120), welches an der Basis (30) des Reinigungskopfs (12) angeordnet ist, und welches beabstandet zu der mindestens einen Reinigungswalzeneinheit (18) ist, wobei bei einem Reinigungsbetrieb der Reinigungskopf (12) sich über die mindestens eine Reinigungswalzeneinheit (18) und das mindestens eine Abstützelement (120) an einem zu reinigenden Boden (16) abstützt, dadurch gekennzeichnet, dass die Schmutzfluidtankeinrichtung (32) eine dem mindestens einen Abstützelement (120) zugeordnete durchgehende Ausnehmung (152) aufweist, durch welche das mindestens eine Abstützelement (120) durchgeführt ist, wenn die Schmutzfluidtankeinrichtung (32) an dem Reinigungskopf (12) sitzt.
- Bodenreinigungsmaschine nach Anspruch 1, dadurch gekennzeichnet, dass über die mindestens eine Reinigungswalzeneinheit (18) und das mindestens eine Abstützelement (120) eine Aufstellfläche (14) für den Reinigungskopf (12) vorgegeben ist, insbesondere mit mindestens einem der Folgenden:- die Aufstellfläche (14) ist eine ebene Fläche;- eine Rotationsachse (46) der mindestens einen Reinigungswalzeneinheit (18) ist parallel zu der Aufstellfläche (14);- die Haltestabeinrichtung (36) ist schwenkbar um eine Schwenkachse (40) an den Reinigungskopf (12) angelenkt und die Schwenkachse (40) ist parallel zur Aufstellfläche (14);- eine Entnahmerichtung (148) zum Abnehmen der Schmutzfluidtankeinrichtung (32) von dem Reinigungskopf (12) und eine Einsetzrichtung zum Einsetzen der Schmutzfluidtankeinrichtung (32) an dem Reinigungskopf (12) ist jeweils quer und insbesondere senkrecht zu der Aufstellfläche(14);- die Schmutzfluidtankeinrichtung (32) ist nach unten in Richtung der Aufstellfläche (14) von dem Reinigungskopf (12) abnehmbar;- die Basis (30) ist in einer Höhenrichtung beabstandet zu der Aufstellfläche (14).
- Bodenreinigungsmaschine nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass das mindestens eine Abstützelement (120) eine Rolle (124) oder einen Gleiter umfasst.
- Bodenreinigungsmaschine nach einem der vorangehenden Ansprüche, dadurch gekennzeichnet, dass das mindestens eine Abstützelement (120) einen Pfosten (122) umfasst, welcher mit der Basis (30) verbunden ist und von der Basis (30) weg in einen Raum (150) ragt, in welchem die Schmutzfluidtankeinrichtung (32) positioniert ist, insbesondere gekennzeichnet durch mindestens eines der Folgenden:- an dem Pfosten (122) sitzt eine Rolle (124) oder ein Gleiter;- der Pfosten (122) ist bei an der Basis (30) fixierter Schmutzfluidtankeinrichtung (32) in der zugeordneten durchgehenden Ausnehmung (152) der Schmutzfluidtankeinrichtung (32) positioniert.
- Bodenreinigungsmaschine nach einem der vorangehenden Ansprüche, dadurch gekennzeichnet, dass die durchgehende Ausnehmung (152) an einer Oberseite (128) der Schmutzfluidtankeinrichtung (32) und an einer Unterseite (127) der Schmutzfluidtankeinrichtung (32) jeweils offen ist, wobei bei an der Basis (30) fixierter Schmutzfluidtankeinrichtung (32) die Oberseite (128) der Basis (30) zugewandt ist, und wobei die Unterseite (127) der Oberseite (128) abgewandt ist, insbesondere dadurch gekennzeichnet, dass die durchgehende Ausnehmung (152) durch eine Wandung (130) der Schmutzfluidtankeinrichtung (32) zwischen der Oberseite (128) und der Unterseite (127) begrenzt ist, wobei die Wandung (130) geschlossen ist oder die durchgehende Ausnehmung (152) zu einer Seite der Schmutzfluidtankeinrichtung (32) hin offen ist, wobei vorzugsweise die Wandung (130) quer und insbesondere senkrecht zu der Oberseite (128) und/oder der Unterseite (127) der Schmutzfluidtankeinrichtung (32) orientiert ist.
- Bodenreinigungsmaschine nach einem der vorangehenden Ansprüche, dadurch gekennzeichnet, dass die mindestens eine Reinigungswalzeneinheit (18) an einer Walzenaufnahme (106) einer Welle (108) mit einem ersten Wellenteil (110), einem Mittelteil (114) und einem zweiten Wellenteil (112) sitzt, wobei der Mittelteil (114) zwischen dem ersten Wellenteil (110) und dem zweiten Wellenteil (112) liegt und an dem ersten Wellenteil (110) ein erster Walzenteil (116) der mindestens einen Reinigungswalzeneinheit (18) und an dem zweiten Wellenteil (112) ein zweiter Walzenteil (118) der mindestens einen Reinigungswalzeneinheit (18) angeordnet ist, und dass ein Mittelantrieb vorgesehen ist, welcher auf den Mittelteil (114) wirkt, und insbesondere
dadurch gekennzeichnet, dass das mindestens eine Abstützelement (120) bezogen auf eine Längsachse (24) des Reinigungskopfs (12) fluchtend zu dem Mittelteil (114) angeordnet ist. - Bodenreinigungsmaschine nach einem der vorangehenden Ansprüche, dadurch gekennzeichnet, dass an der Schmutzfluidtankeinrichtung (32) eine Trittlasche (34) angeordnet ist und dass bei an dem Reinigungskopf (12) fixierter Schmutzfluidtankeinrichtung (32) das mindestens eine Abstützelement (120) bezogen auf eine Längsachse (24) des Reinigungskopfs (12) fluchtend zu der Trittlasche (34) angeordnet ist.
- Bodenreinigungsmaschine nach einem der vorangehenden Ansprüche, dadurch gekennzeichnet, dass das mindestens eine Abstützelement (120) mittig zwischen einer ersten lateralen Seite (26) und einer zweiten lateralen Seite (28) des Reinigungskopfs (12) angeordnet ist.
- Bodenreinigungsmaschine nach einem der vorangehenden Ansprüche, dadurch gekennzeichnet, dass die Schmutzfluidtankeinrichtung (32) beweglich und insbesondere schwimmend an der Basis (30) gehalten ist.
- Bodenreinigungsmaschine nach einem der vorangehenden Ansprüche, dadurch gekennzeichnet, dass die Haltestabeinrichtung (36) über ein Schwenkgelenk (84) schwenkbar an dem Reinigungskopf (12) gehalten ist, wobei eine Schwenkachse (40) des Schwenkgelenks (84) mit der Rotationsachse (46) der mindestens einen Reinigungswalzeneinheit (18) zusammenfällt, und insbesondere
dadurch gekennzeichnet, dass das Schwenkgelenk (84) als Orbitalgelenk ausgebildet ist mit einer orbitalen Bahnführung der Haltestabeinrichtung (36) an dem Reinigungskopf (12). - Bodenreinigungsmaschine nach Anspruch 10, dadurch gekennzeichnet, dass das Schwenkgelenk (84) eine Bahnführungseinrichtung (86) aufweist, welche drehfest an dem Reinigungskopf (12) sitzt und welche einen Kreisbahnabschnitt (88) aufweist mit einem Zentrum, welches auf der Schwenkachse (40) liegt, und das Schwenkgelenk (84) eine Gegeneinrichtung (90) aufweist, welche drehfest an der Haltestabeinrichtung (36) sitzt und welche sich an der Bahnführungseinrichtung (86) abstützt, insbesondere mit mindestens einem der Folgenden:- die mindestens eine Reinigungswalzeneinheit (18) ist im Bereich eines vorderen Endes (20) des Reinigungskopfs (12) angeordnet, mit Folgenden:- der Kreisbahnabschnitt (88) ist bezogen auf eine Längsachse (24) des Reinigungskopfs (12) hinter der mindestens einen Reinigungswalzeneinheit (18) angeordnet;- der Kreisbahnabschnitt (88) ist bezogen auf eine Höhenachse (12) des Reinigungskopfs (12) oberhalb der mindestens einen Reinigungswalzeneinheit (18) angeordnet;- die Gegeneinrichtung (90) ist über mindestens drei Abstützpunkte an der Bahnführungseinrichtung (86) abgestützt.
- Bodenreinigungsmaschine nach Anspruch 10 oder 11, dadurch gekennzeichnet, dass dem Reinigungskopf (12) eine Trittlasche (34) im Bereich eines hinteren Endes (22) des Reinigungskopfs (12) zugeordnet ist, wobei das hintere Ende (22) abgewandt zu einem vorderen Ende (20) ist und die mindestens eine Reinigungswalzeneinheit (18) im Bereich des vorderen Endes (20) angeordnet ist, und insbesonderedadurch gekennzeichnet, dass die Trittlasche (34) bezogen auf eine Längsachse (24) des Reinigungskopfs (12) fluchtend zu dem Schwenkgelenk (84) angeordnet ist und insbesondere mittig zwischen einer ersten lateralen Seite (26) und einer zweiten lateralen Seite (28) des Reinigungskopfs (12) angeordnet ist, und/odergekennzeichnet durch mindestens eines der Folgenden:- die Trittlasche (34) ragt über ein hinteres Ende eines Gehäuses (100) des Reinigungskopfs (12) hinaus;- die Trittlasche (34) sitzt an einer Schmutzfluidtankeinrichtung (32), welche abnehmbar an dem Reinigungskopf (12) angeordnet ist;- die Trittlasche (34) weist hochgezogene laterale Randwandungen (146) auf.
- Bodenreinigungsmaschine nach einem der Ansprüche 10 bis 12, gekennzeichnet durch mindestens eines der Folgenden:- an dem Reinigungskopf (12) ist ein Freiraum (102) gebildet, in welchem die Haltestabeinrichtung (36) bei einer Verschwenkung um die Schwenkachse (40) beweglich ist, und insbesondere ist eine Trittlasche (34) an dem Freiraum (102) oder in Fortsetzung des Freiraums (102) angeordnet;- es ist ein Antriebsmotor (98) für die Reinigungswalzeneinheit (18) vorgesehen, welcher bezogen auf die Schwenkbarkeit der Haltestabeinrichtung (36) um die Schwenkachse (40) drehfest mit der Haltestabeinrichtung (36) verbunden ist;- es ist eine Getriebeeinrichtung (104) zur Übertragung eines Drehmoments von einem Antriebsmotor (98) auf die mindestens eine Reinigungswalzeneinheit (18) vorgesehen, wobei die Getriebeeinrichtung (104) bezogen auf eine Schwenkbarkeit der Haltestabeinrichtung (36) um die Schwenkachse (40) drehfest mit der Haltestabeinrichtung (36) verbunden ist;- es ist eine Walzenaufnahme (106) vorgesehen, an welcher die mindestens eine Reinigungswalzeneinheit (18) sitzt, wobei die Walzenaufnahme (106) bezogen auf die Schwenkbarkeit der Haltestabeinrichtung (36) drehfest mit der Haltestabeinrichtung (36) verbunden ist.
- Bodenreinigungsmaschine nach einem der vorangehenden Ansprüche, dadurch gekennzeichnet, dass die Haltestabeinrichtung (36) einen ersten Bereich (76) mit einer ersten Längsachse (80) aufweist und einen zweiten Bereich (78) mit einer zweiten Längsachse (42) aufweist, wobei die erste Längsachse (80) und die zweite Längsachse (42) in einem stumpfen Winkel (82) zueinander orientiert sind, wobei insbesondere der stumpfe Winkel (82) im Bereich zwischen 120° und 170° liegt, und insbesondere gekennzeichnet durch mindestens eines der Folgenden:- der zweite Bereich (78) sitzt an dem ersten Bereich (76);- der erste Bereich (76) ist oder umfasst einen distalen Bereich der Haltestabeinrichtung (36);- die Haltestabeinrichtung (36) ist über den ersten Bereich (76) an den Reinigungskopf (12) angelenkt;- an dem ersten Bereich (76) ist eine Gegeneinrichtung (90) des Schwenkgelenks (84) angeordnet;- an dem ersten Bereich (76) ist ein Antriebsmotor (98) für die mindestens eine Reinigungswalzeneinheit (18) angeordnet;- der erste Bereich (76) weist ein Gehäuse (100) auf;- an dem ersten Bereich (76) ist ein Batteriehalter angeordnet;- an dem ersten Bereich (76) ist eine insbesondere abnehmbare Tankeinrichtung für Reinigungsflüssigkeit angeordnet;- der zweite Bereich (78) ist oder umfasst einen proximalen Bereich der Haltestabeinrichtung (36);- an dem zweiten Bereich (78) ist ein Handgriff (38) angeordnet;- an dem zweiten Bereich (78) ist eine insbesondere abnehmbare Tankeinrichtung für Reinigungsflüssigkeit (50) angeordnet;- an dem zweiten Bereich (78) ist ein Batteriehalter (48) angeordnet;- an dem zweiten Bereich (78) oder an einem Handgriff (38), welcher an dem zweiten Bereich (78) sitzt, ist ein Bedienungspanel angeordnet;- der zweite Bereich (78) weist eine gerade Erstreckung in der zweiten Längsachse (42) auf.
- Bodenreinigungsmaschine nach einem der Ansprüche 10 bis 14, dadurch gekennzeichnet, dass die Haltestabeinrichtung (36) über das Schwenkgelenk (84) einen freien Schwenkwinkelbereich zu dem Reinigungskopf (12) mit einem Schwenkwinkel (182) zwischen einer Längsachse (42) der Haltestabeinrichtung (36) und einer Aufstellfläche (14) des Reinigungskopfs (12) auf einen zu reinigenden Boden (16) aufweist, wobei der Schwenkwinkel (182) im Bereich zwischen einer unteren Grenze und einer oberen Grenze liegt, insbesondere mit mindestens einem der Folgenden:- die untere Grenze liegt bei 0° oder größer 0°;- die untere Grenze ist kleiner als 50° und insbesondere kleiner als 40° und insbesondere kleiner als 30°;- die obere Grenze liegt im Bereich zwischen 80° und 120° und insbesondere bei ca. 90°;- an der oberen Grenze weist die Haltestabeinrichtung (36) eine feststellbare Parkposition (185) bezüglich des Reinigungskopfs (12) auf;und insbesondere gekennzeichnet durch eine Verriegelungseinrichtung (186), welche die Haltestabeinrichtung (36) an der oberen Grenze mit dem Reinigungskopf (12) so verriegelt, dass eine Schwenkbarkeit der Haltestabeinrichtung (36) zu dem Reinigungskopf (12) gesperrt ist.
- Bodenreinigungsmaschine nach Anspruch 15, gekennzeichnet durch mindestens eines der Folgenden:- eine Weiterverschwenkung der Haltestabeinrichtung (36), wenn diese an der oberen Grenze ist und mit dem Reinigungskopf (12) verriegelt ist, und wenn der Reinigungskopf (12) ordnungsgemäß auf einen zu reinigenden Boden (16) aufgestellt ist, führt bei Vergrößerung des Schwenkwinkels (182) ohne weiteren Bedienereingriff zu einer Verschwenkung des Reinigungskopfs (12) zu dem zu reinigenden Boden (16);- die Verriegelungseinrichtung (186) umfasst mindestens einen federbeaufschlagten Stift (196, 196') und eine zugeordnete Eintauchöffnung (194) für den Stift (196, 196'), wobei (i) der mindestens eine Stift (196, 196') drehfest an der Haltestabeinrichtung (36) angeordnet ist und die zugeordnete Eintauchöffnung (194) drehfest an dem Reinigungskopf (12) angeordnet ist, oder (ii) der mindestens eine Stift (196, 196') drehfest an dem Reinigungskopf (12) angeordnet ist und die zugeordnete Eintauchöffnung (194) drehfest an der Haltestabeinrichtung (36) angeordnet ist;- der Eintauchöffnung (194) ist außerhalb der Eintauchöffnung (194) eine erste schiefe Ebene (210) zugeordnet, welche bei Vergrößerung des Schwenkwinkels (182) den zugeordneten Stift (196, 196') in die Eintauchöffnung (194) führt, wobei die erste schiefe Ebene (210) eine Verschiebung des Stifts (196, 196') entgegen einer Kraftwirkung der Federbeaufschlagung bewirkt;- der mindestens eine Stift (196, 196') weist eine an die erste schiefe Ebene (210) angepasste erste Anlagefläche (212) auf;- die Eintauchöffnung (194) ist durch eine Wandung begrenzt, welche eine zweite schiefe Ebene (214) aufweist und über welche der zugeordnete Stift (196, 196') bei Verkleinerung des Schwenkwinkels (182) aus der Eintauchöffnung (194) herausbewegt ist, wobei die zweite schiefe Ebene (214) eine Verschiebung des Stifts (196, 196') entgegen einer Kraftwirkung der Federbeaufschlagung bewirkt;- der mindestens eine Stift (196, 196') weist eine an die zweite schiefe Ebene (214) angepasste zweite Anlagefläche (216) auf.
- Bodenreinigungsmaschine nach einem der vorangehenden Ansprüche, gekennzeichnet durch mindestens eines der Folgenden:- an der Schmutzfluidtankeinrichtung (32) ist eine Trittlasche (34) angeordnet;- an dem Reinigungskopf (12) ist mindestens ein Abstreifelement (70) angeordnet, welches auf die mindestens eine Reinigungswalzeneinheit (18) wirkt und zum Abstreifen von Schmutzfluid von der mindestens einen Reinigungswalzeneinheit (18) dient;- das mindestens eine Abstreifelement (70) taucht in ein Wirkmaterial der mindestens einen Reinigungswalzeneinheit (18) ein;- Schmutzfluid wird direkt von der mindestens einen Reinigungswalzeneinheit (18) ohne Betrieb einer Absaugeinrichtung in die Schmutzfluidtankeinrichtung (32) befördert.
- Bodenreinigungsmaschine nach einem der vorangehenden Ansprüche, gekennzeichnet durch mindestens eines der Folgenden:- die Haltestabeinrichtung (36) ist für einen stehenden Bediener ausgebildet, welcher auf dem zu reinigenden Boden (16) steht, wobei der Reinigungskopf (12) über eine Aufstellfläche (14) auf den zu reinigenden Boden (16) aufgesetzt ist und die Bodenreinigungsmaschine ist über die Haltestabeinrichtung (36) über den zu reinigenden Boden (16) führbar;- die mindestens eine Reinigungswalzeneinheit (18) ist durch einen Antriebsmotor (98) motorisch angetrieben;- der Reinigungskopf (12) weist ein Gehäuse (100) auf, in welchem mindestens teilweise die mindestens eine Reinigungswalzeneinheit (18) angeordnet ist;- die mindestens eine Reinigungswalzeneinheit (18) liegt mit äußeren Enden jeweils an einer lateralen ersten Seite (26) und einer lateralen zweiten Seite (28) des Reinigungskopfs (12).
- Bodenreinigungsmaschine nach einem der vorangehenden Ansprüche, gekennzeichnet durch mindestens eines der Folgenden:- an dem Reinigungskopf (12) ist (i) mindestens ein Abstreifelement (70) für die mindestens eine Reinigungswalzeneinheit (18) angeordnet;- an dem Reinigungskopf (12) ist (ii) mindestens ein Kammelement (232) angeordnet, welches auf die mindestens eine Reinigungswalzeneinheit (18) wirkt;- dem Reinigungskopf (12) (iii) mindestens ein Kehrelement (62) zugeordnet, welches der mindestens einen Reinigungswalzeneinheit (18) Kehrgut zuführt, wobei das mindestens eine Kehrelement (62) insbesondere an einer Schmutzfluidtankeinrichtung (32) angeordnet ist,wobei irgendeines der Elemente (i), (ii), (iii) oder irgendeine Kombination dieser Elemente (70, 232, 62) zu der mindestens einen Reinigungswalzeneinheit (18) die gleiche Position unabhängig von einer Schwenkposition der Haltestabeinrichtung (36) zu dem Reinigungskopf (12) aufweist.
- Bodenreinigungsmaschine nach einem der vorangehenden Ansprüche, gekennzeichnet durch mindestens eines der folgenden Operationsmodi:- einen trockenen Kehrbetrieb ohne Beaufschlagung des zu reinigenden Bodens (16) oder der mindestens einen Reinigungswalzeneinheit (18) mit Reinigungsflüssigkeit;- einen Nasswischbetrieb mit Beaufschlagung des zu reinigenden Bodens (16) und/oder der mindestens einen Reinigungswalzeneinheit (18) mit Reinigungsflüssigkeit;- einen Kehrbetrieb und einen Nasswischbetrieb, wobei insbesondere über ein Kehrelement (62) Grobschmutz der mindestens einen Reinigungswalzeneinheit (18) zugeführt wird und über die mindestens eine Reinigungswalzeneinheit (18) in eine Schmutzfluidtankeinrichtung (32) gefördert wird und über mindestens ein Abstreifelement (70) Schmutzfluid von der mindestens einen Reinigungswalzeneinheit (18) abgestreift und von dort in die Schmutzfluidtankeinrichtung (32) befördert wird.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102021134612.6A DE102021134612A1 (de) | 2021-12-23 | 2021-12-23 | Bodenreinigungsmaschine mit mindestens einem Abstützelement |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP4201283A1 EP4201283A1 (de) | 2023-06-28 |
| EP4201283B1 true EP4201283B1 (de) | 2024-11-13 |
Family
ID=84488172
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP22212796.1A Active EP4201283B1 (de) | 2021-12-23 | 2022-12-12 | Bodenreinigungsmaschine mit mindestens einem abstützelement |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP4201283B1 (de) |
| CN (1) | CN116327052A (de) |
| DE (1) | DE102021134612A1 (de) |
Family Cites Families (44)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3789449A (en) | 1972-06-21 | 1974-02-05 | Scott & Fetzer Co | Hard surface floor cleaner |
| US4173054A (en) | 1977-08-11 | 1979-11-06 | Hukuba Kogyo Kabushiki Kaisha | Floor sweeper |
| US4875246A (en) | 1988-07-22 | 1989-10-24 | Quad Research, Inc. | Surface treating device |
| US5657503A (en) | 1995-06-07 | 1997-08-19 | Caruso; Steven Jerome | Automated rotary mopping, waxing, and light sweeping systems |
| US5657504A (en) * | 1996-10-03 | 1997-08-19 | Khoury; Fouad M. | Roller mop with wet roller, squeegee, and debris pickup |
| US6968593B1 (en) * | 2001-08-14 | 2005-11-29 | Bissell Homecare, Inc. | Hand-held deep cleaner |
| DE10357637A1 (de) | 2003-12-10 | 2005-07-07 | Vorwerk & Co. Interholding Gmbh | Selbstfahrendes oder zu verfahrendes Kehrgerät sowie Kombination eines Kehrgeräts mit einer Basisstation |
| SE0400642D0 (sv) | 2004-03-15 | 2004-03-15 | Electrolux Ab | Floor cleaning implement |
| US7448114B2 (en) | 2005-05-05 | 2008-11-11 | Tennant Company | Floor sweeping and scrubbing machine |
| US20060272120A1 (en) | 2005-06-01 | 2006-12-07 | Kenneth Barrick | Extraction cleaner |
| US7921497B2 (en) | 2006-09-28 | 2011-04-12 | Kimberly-Clark Worldwide, Inc. | Carpet stain removal device |
| DE102007054500A1 (de) | 2006-11-23 | 2008-05-29 | Vorwerk & Co. Interholding Gmbh | Verfahrbares Haushalts-Bodenreinigungsgerät sowie Befeuchtungseinrichtung für eine Wischwalze |
| CN201197698Y (zh) | 2008-05-25 | 2009-02-25 | 袁哲 | 电动拖把 |
| EP2191763A1 (de) | 2008-10-07 | 2010-06-02 | Koninklijke Philips Electronics N.V. | Reinigungsvorrichtung mit Bürstenrollen |
| EP2177146A1 (de) | 2008-10-16 | 2010-04-21 | Koninklijke Philips Electronics N.V. | Vorrichtung und Verfahren zum Nassreinigen von Fußböden |
| US8627543B2 (en) | 2010-03-12 | 2014-01-14 | Euro-Pro Operating Llc | Cleaning appliance having multiple functions |
| WO2013106762A2 (en) | 2012-01-13 | 2013-07-18 | Kent Research Corporation | Surface cleaning machines and methods of use |
| AU2014100145A4 (en) | 2013-03-01 | 2014-03-13 | Bissell Inc. | Surface cleaning apparatus |
| EP3795055B1 (de) | 2013-12-12 | 2024-01-24 | Alfred Kärcher SE & Co. KG | Bodenreinigungsmaschine |
| UA118498C2 (uk) | 2014-10-13 | 2019-01-25 | Альфред Керхер Гмбх Унд Ко. Кг | Машина для чистки поверхонь |
| DE102014114809A1 (de) | 2014-10-13 | 2016-04-14 | Alfred Kärcher Gmbh & Co. Kg | Flächen-Reinigungsmaschine mit Befeuchtungseinrichtung |
| DE102014114776A1 (de) | 2014-10-13 | 2016-04-14 | Alfred Kärcher Gmbh & Co. Kg | Flächen-Reinigungsmaschine |
| DE102014114813A1 (de) | 2014-10-13 | 2016-04-14 | Alfred Kärcher Gmbh & Co. Kg | Flächen-Reinigungsmaschine und Verfahren zum Betreiben einer Flächen-Reinigungsmaschine |
| DE202015101302U1 (de) | 2015-03-13 | 2015-04-08 | Vorwerk & Co. Interholding Gmbh | Reinigungsgerät in Form eines Staubsaugers oder Vorsatzgerätes für einen Staubsauger |
| KR102072513B1 (ko) | 2015-10-10 | 2020-02-03 | 하이제로 테크놀로지스 캄파니 리미티드 | 바닥 청소기 및 그 물탱크 구조 |
| HUE046751T2 (hu) | 2015-10-10 | 2020-03-30 | Hizero Tech Co Ltd | Padlótisztító és annak a tisztítógörgõjének tisztítására szolgáló szerkezet |
| PT3238596T (pt) | 2015-10-10 | 2019-08-06 | Hizero Tech Co Ltd | Equipamento de limpeza para o chão, componente de rolo de limpeza e rolo de esponja |
| EP3520666B1 (de) | 2015-10-10 | 2022-08-17 | Hizero Appliances Corporation | Bodenreiniger |
| CN205181257U (zh) | 2015-10-12 | 2016-04-27 | 深圳市赫兹科技有限公司 | 地面清洁器及其水槽结构 |
| CN205181251U (zh) | 2015-10-12 | 2016-04-27 | 深圳市赫兹科技有限公司 | 地面清洁器、清洁筒组件及海绵筒 |
| CN108135419A (zh) | 2015-10-12 | 2018-06-08 | 阿尔弗雷德·凯驰两合公司 | 表面清洁机 |
| CN205181256U (zh) | 2015-10-12 | 2016-04-27 | 深圳市赫兹科技有限公司 | 地面清洁器及其清洁筒清理结构 |
| CN205181250U (zh) | 2015-10-12 | 2016-04-27 | 深圳市赫兹科技有限公司 | 地面清洁器 |
| US10092155B2 (en) | 2015-10-28 | 2018-10-09 | Bissell Homecare, Inc. | Surface cleaning apparatus |
| CN205359367U (zh) | 2016-01-13 | 2016-07-06 | 南京信息工程大学 | 一种小型手持式楼道清扫机 |
| US9622637B1 (en) | 2016-03-18 | 2017-04-18 | Protrend Co., Ltd. | Combined mop |
| DE202016105300U1 (de) | 2016-09-23 | 2016-10-21 | Hizero Technologies Co., Ltd. | Bodenreinigungsvorrichtung, Reinigungstrommelanordnung und Schwammtrommel |
| DE202016105301U1 (de) | 2016-09-23 | 2016-10-19 | Hizero Technologies Co., Ltd. | Bodenreinigungsvorrichtung |
| CN206687671U (zh) | 2016-11-10 | 2017-12-01 | 唐飞宇 | 一种新型便携式地面污物清理装置 |
| AU2017101723A4 (en) | 2016-12-16 | 2018-01-18 | Bissell Inc. | Surface cleaning apparatus |
| CN107007215A (zh) | 2017-06-02 | 2017-08-04 | 深圳市得城网络科技有限公司 | 具有旋转式人体感应器的自动扫地机器人 |
| DE102017120723A1 (de) | 2017-09-08 | 2019-03-14 | Alfred Kärcher SE & Co. KG | Reinigungsmaschinen-Station für eine Reinigungsmaschine, Reinigungsmaschine und Kombination aus Reinigungsmaschinen-Station und Reinigungsmaschine |
| DE202018104772U1 (de) | 2018-08-20 | 2018-09-07 | Hizero Technologies Co., Ltd. | Schmutzwassersammel- und -detektionsmechanismus und Reinigungsvorrichtung |
| CN114144104B (zh) | 2019-07-24 | 2023-04-28 | 阿尔弗雷德·卡赫欧洲两合公司 | 地面清洁机 |
-
2021
- 2021-12-23 DE DE102021134612.6A patent/DE102021134612A1/de active Pending
-
2022
- 2022-12-12 EP EP22212796.1A patent/EP4201283B1/de active Active
- 2022-12-22 CN CN202211656075.6A patent/CN116327052A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| CN116327052A (zh) | 2023-06-27 |
| EP4201283A1 (de) | 2023-06-28 |
| DE102021134612A1 (de) | 2023-06-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP4201284B1 (de) | Bodenreinigungsmaschine mit trittlasche und verfahren zur abnahme einer schmutzfluidtankeinrichtung von einem reinigungskopf | |
| EP4233662B1 (de) | Bodenreinigungsmaschine und verfahren zum betreiben einer bodenreinigungsmaschine | |
| EP2773254B1 (de) | Handgeführte bodenreinigungsmaschine | |
| EP4541252A2 (de) | Flächen-reinigungsmaschine | |
| DE102022102918A1 (de) | Bodenreinigungsgerät mit Kassette | |
| EP4003118B1 (de) | Bodenreinigungsmaschine | |
| DE102022102924A1 (de) | Bodenreinigungsgerät mit beweglichem Abstreifelement | |
| DE202022101313U1 (de) | Bodenreinigungsgerät mit beweglichem Abstreifelement | |
| WO2013064179A1 (de) | Handgeführte bodenreinigungsmaschine | |
| WO2023152021A1 (de) | Bodenreinigungsgerät mit schmutzfluid-tank | |
| EP3547889B1 (de) | Reinigungsgerät und verfahren zum betreiben eines reinigungsgeräts | |
| WO2025168408A1 (de) | Flächenreinigungsgerät mit halteeinrichtung und verfahren zum betreiben eines flächenreinigungsgeräts | |
| DE202022101312U1 (de) | Bodenreinigungsgerät mit Kassette | |
| EP4201285A1 (de) | Bodenreinigungsmaschine mit schwenkgelenk und verfahren zum betreiben einer bodenreinigungsmaschine | |
| WO2021043429A1 (de) | Bodenreinigungsmaschine mit haaraufnahme und verfahren zum betreiben einer bodenreinigungsmaschine | |
| EP4201283B1 (de) | Bodenreinigungsmaschine mit mindestens einem abstützelement | |
| EP4452034A1 (de) | Flächenreinigungsmaschine mit gekrümmtem abstreifelement | |
| WO2024126142A1 (de) | Bodenreinigungsgerät mit bodenkopf mit wandung | |
| WO2024126122A1 (de) | Bodenreinigungsgerät mit schmutzfluid-tank mit zwei bereichen | |
| WO2025214766A1 (de) | Flächenreinigungsgerät mit seitenreinigungswerkzeug und verfahren zum betreiben eines flächenreinigungsgeräts | |
| DE102024105830A1 (de) | Bodenreinigungsmaschine mit Sperreinrichtung | |
| EP4533989A1 (de) | Bodenreinigungsmaschine mit tragegriff |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20231227 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20240627 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502022002126 Country of ref document: DE |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20241217 Year of fee payment: 3 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Free format text: CASE NUMBER: APP_1572/2025 Effective date: 20250109 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20241113 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250313 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250313 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241113 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241113 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241113 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241113 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241113 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250213 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241113 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250214 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241113 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250213 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241113 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241113 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241113 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241113 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241113 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241113 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241113 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502022002126 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20241212 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241113 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241113 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20241231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20241231 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20250930 Year of fee payment: 4 |
|
| 26N | No opposition filed |
Effective date: 20250814 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20241212 |