EP3287403B1 - Ascenseur - Google Patents
Ascenseur Download PDFInfo
- Publication number
- EP3287403B1 EP3287403B1 EP17181466.8A EP17181466A EP3287403B1 EP 3287403 B1 EP3287403 B1 EP 3287403B1 EP 17181466 A EP17181466 A EP 17181466A EP 3287403 B1 EP3287403 B1 EP 3287403B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- brake
- car
- torque
- elevator
- control unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 claims description 17
- 230000008569 process Effects 0.000 claims description 13
- 238000001514 detection method Methods 0.000 claims description 9
- 238000000926 separation method Methods 0.000 claims description 4
- 238000013459 approach Methods 0.000 claims 2
- 230000008859 change Effects 0.000 description 7
- 230000004044 response Effects 0.000 description 6
- 230000003068 static effect Effects 0.000 description 6
- 238000005303 weighing Methods 0.000 description 6
- 230000001133 acceleration Effects 0.000 description 4
- 230000001360 synchronised effect Effects 0.000 description 4
- 230000003247 decreasing effect Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 2
- 230000004913 activation Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 230000003313 weakening effect Effects 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/24—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration
- B66B1/28—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical
- B66B1/30—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical effective on driving gear, e.g. acting on power electronics, on inverter or rectifier controlled motor
- B66B1/304—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical effective on driving gear, e.g. acting on power electronics, on inverter or rectifier controlled motor with starting torque control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B11/00—Main component parts of lifts in, or associated with, buildings or other structures
- B66B11/02—Cages, i.e. cars
- B66B11/026—Attenuation system for shocks, vibrations, imbalance, e.g. passengers on the same side
- B66B11/028—Active systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/24—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration
- B66B1/28—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical
- B66B1/30—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical effective on driving gear, e.g. acting on power electronics, on inverter or rectifier controlled motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/24—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration
- B66B1/28—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical
- B66B1/32—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical effective on braking devices, e.g. acting on electrically controlled brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/34—Details, e.g. call counting devices, data transmission from car to control system, devices giving information to the control system
- B66B1/36—Means for stopping the cars, cages, or skips at predetermined levels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
Definitions
- the present invention relates to an elevator.
- the elevator car is normally driven under control to allow the motor to output compensation torque corresponding to the difference between the car and the counterweight so as to maintain static state of the car while preventing its fall even in the transition from the stop state under the braking force to the state where the braking force is released.
- it is necessary to detect inside weight of the car by means of the weighing sensor attached to the bottom of the car or the thimble rod. Possible error of the weighing sensor may fail to accurately output the required compensation torque, which shakes the car upon starting at a magnitude corresponding to the error.
- Japanese Patent Application Laid-Open No. 2015-00796 discloses the method of calibrating the weighing sensor for the purpose of solving the above-described problem.
- US5247140 discloses a brake control system for an elevator control apparatus according to the preamble of claim 1.
- a brake circuit that includes a current detector, a comparator for comparing the detected value with a dictated brake current pattern, and a switch which switches the brake current in accordance with the magnitude of the difference between the detected current value and the dictated value.
- CN104671022 discloses an elevator control device and an elevator control method.
- a state where a first torque command value is applied to a motor in the direction the same as the advancing direction of the elevator car in advance before the advancing of the elevator car the braking force of the brake is released gradually to make the elevator car to start advancing.
- the braking force of the brake is diagnosed by checking the matching between the current value of a braking coil and the value of the unbalance torque at the time of advancing start.
- Fig. 1 is an overall view of an elevator system structure according to the present invention.
- An elevator controller 100 controls movement of a car 104 of the elevator.
- the elevator controller 100 includes a brake control unit 20 and a torque control unit 23 in addition to an elevator control unit 2 for operation control of the elevator.
- the car 104 operated to move between floors of the building through the hoistway is connected to a weight or counterweight with a rope for balancing with the car 104.
- the car 104 includes a car door that is opened and closed in engagement with the door at the landing floor side.
- the car 104 is operated by a motor 103 which drives the sheave.
- a power converter 101 supplies drive power to the motor 103.
- the power converter 101 outputs power for controlling the motor in accordance with a car position control command from the elevator controller 100.
- a rotation sensor as the pulse generator such as an encoder is attached to the motor 103.
- the elevator controller 100 counts the pulse generated by rotation of the motor 103 so as to calculate speed of the motor 103, and moving direction, position, movement distance of the car 104 in the hoistway.
- the rotation sensor attached to the motor will be referred to as a machine encoder.
- the elevator controller outputs a brake power source stop command and a power supply stop command (not shown) for braking the car.
- the brake power source actuates a brake 102, and the power supply interrupts power supply to the power converter 101 so as to brake the car 104.
- the brake power source and the power supply are circuits each constituted by an electromagnetic contactor called contactor.
- the brake 102 includes a brake pad for braking the sheave through friction sliding operation, a solenoid coil for lifting the brake pad so as to generate the gap between the sheave and the brake pad, and a core.
- a brake pad for braking the sheave through friction sliding operation
- a solenoid coil for lifting the brake pad so as to generate the gap between the sheave and the brake pad
- a core for generating the gap between the sheave and the brake pad
- Power is supplied to the solenoid coil through relay from the brake power source.
- the brake 102 is connected to a brake current control circuit 21 as the circuit configured to control the current (brake current 22) applied to the solenoid coil and configured to make the braking force of the brake variable.
- the brake 102 is provided with a brake check switch 8 configured to mechanically detect whether the brake pad and the sheave are separated (uncontact state).
- the information detected by the brake check switch 8 indicating as to whether the brake and the sheave are separated (uncontact state) is output to the elevator control unit 2.
- the brake current control circuit 21 is constituted by a converter for controlling current or voltage, for example, inverter circuit, chopper circuit or the like, a hall CT for detecting the brake current, and a control unit for controlling the brake current.
- the brake current 22 is controlled into the command value.
- This embodiment has been described by taking the brake mechanism for varying the braking force in accordance with the current using the solenoid coil as an example of varying the braking force.
- the brake configured to vary the braking force in accordance with the distance by utilizing the actuator of direct drive type, or the brake (shoe brake) configured to vary the braking force in accordance with the rotation angle by utilizing the rotation mechanism.
- the brake configured to vary the braking force in accordance with the distance by utilizing the actuator of direct drive type, or the brake (shoe brake) configured to vary the braking force in accordance with the rotation angle by utilizing the rotation mechanism.
- Arbitrary type of brake may be employed so long as the braking force of the brake is variable in accordance with the specific command.
- a position sensor 5 is a door zone sensor configured to detect a detection plate 6 so as to determine if the elevator is at the position where the door can be opened.
- a car speed sensor 7 for detecting the car speed may be formed as a rotation sensor attached to the governor, for example.
- the rotation sensor attached to the governor will be referred to as a governor encoder. It is also possible to directly attach the acceleration sensor to the car.
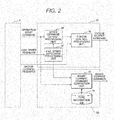
- Fig. 2 is a block diagram representing correlation between the brake control unit 20 and the torque control unit 23 with respect to processing executed by those units.
- a speed command output processing unit 30 Upon reception of an operation start command input from the elevator control unit 2, a speed command output processing unit 30 issues a zero speed command.
- the difference between the zero speed command and a car speed feedback input from a car speed detection processing unit 31 is calculated for execution of target value follow-up control, for example, proportional integral control.
- the torque command is output. In other words, the torque command is output so that the car speed becomes zero.
- the car speed detection processing unit 31 detects a car speed feedback signal derived from the machine encoder so that the signal is output for speed command output processing.
- a torque control processing unit 32 obtains the difference between the torque command input from the speed command output processing unit 30 and a torque feedback signal calculated from a motor current feedback signal, executes such process as proportional integral control, and outputs the torque output command.
- the torque output command is input to the power converter 101 so that voltage is applied to a synchronous motor for generating the desired torque.
- the brake control unit 20 includes a brake current command generation unit 33 and a type information database (DB) 34.
- the brake current command generation unit 33 Upon reception of an operation start command input from the elevator control unit 2, the brake current command generation unit 33 outputs the brake current command in reference to the type information DB 34 to be described later.
- the brake current command is input to the brake current control circuit 21, based on which the brake current control circuit 21 controls the brake current 22 to be applied to the brake solenoid coil.
- Fig. 3 graphically represents the time-series correlation among waveforms generated upon start of the brake control unit 20 and the torque control unit 23.
- the time axis is divided into four sections from (a) to (d). The basic operation process will be described with respect to the sections sequentially from the section (a).
- the operation start command has not been input to the respective control units, and therefore, the brake current command is in the zero state.
- the car is kept under braking force by the brake, and accordingly, the car speed is also zero. Because of the braking force applied by the brake, the torque output command is also in the zero state.
- the operation start command is input.
- the brake control unit 20 gradually increases the brake current command value so that the brake current output from the brake current control circuit 21 is applied to the solenoid for lifting the brake 102.
- the brake 102 is lifted slowly so as to decrease the brake torque T.
- the speed command output processing unit 30 has already output the zero speed command.
- the torque control processing unit 32 outputs the torque output command to the power converter 101 so that the car speed becomes zero.
- power is output to the motor 103 to output the torque in accordance with the torque output command to the power converter 101.
- the brake is lifted.
- the motor torque for maintaining the zero speed is increased as well as the output of the torque command.
- the brake torque insufficient to bring the car into static state may be compensated in response to the torque output command. This may maintain the static state of the car.
- the gradient of the brake current command in the section (b) is determined in reference to the type information DB 34 in order to cope with the response which differs depending on the brake type. For example, in the case of brake torque response delay to change in the brake current command, the gradient may be reduced or shaped into step-like form so as to facilitate the response following up to the command.
- the section (c) represents the transitional change into the state that brings the brake torque into zero state as a result of separation of the brake pad from the sheave resulting from increasing brake current.
- the torque required for making the car into static state has been already output in the section (b). Therefore, shaking of the car owing to torque change rarely occurs even in the state that the brake is released.
- the section (d) represents the state that the brake has been separated.
- the torque sufficient to bring the car into static state has been output in the section (c) so that the car is kept in the static state.
- the torque control processing unit 32 has output the torque output command to set the car speed to zero. Subsequently, the speed command is applied to start operation of the car.
- Fig. 4 is a flowchart according to the present invention.
- step S101 the elevator control unit 2 detects whether the operation start command has been input. If the operation start command is OFF, the process ends. If the operation start command is ON, the process proceeds to step S102.
- step S102 the car speed detection processing unit 31 converts the machine encoder information or the information output from the car speed sensor 7, which has been input via the elevator control unit into the car speed.
- the speed command output processing unit 30 judges whether or not the car speed is zero. If the car speed is zero, the process proceeds to step S103 where the brake current command value is increased through the brake current command generation process.
- step S104 the brake torque is reduced as the brake current varies.
- step S102 If it is judged in step S102 that the car speed is not zero, the process proceeds to step S105 where the speed command output processing unit outputs the torque control command to set the car speed to zero.
- step S106 it is judged whether or not the brake pad has been separated. Separation of the brake pad may be detected by utilizing the brake check switch 8 for detecting the brake operation state. If the brake pad has not been separated, the process proceeds to the step prior to step S102. That is, when the brake pad is not separated at the speed other than zero, the control for increasing the brake current is executed while outputting the torque that approximates the speed to zero.
- step S107 the process is kept stand-by until the operation command is input while allowing the speed control unit to output the torque to set the car speed to zero.
- the current command generation increasing process executed by the brake current command generation unit 33 ends to terminate the series of process steps.
- the above-described structure allows the unbalance torque corresponding to the difference between the car and the counterweight to be gradually activated under the decreasing braking force resulting from the brake slowly released by the elevator control unit.
- the control unit subjects the torque command to the follow-up control, which allows slow follow-up to the unbalance torque without causing sharp torque change. This makes it possible to make the acceleration change owing to torque gentle. In the case of error in the weighing sensor and the rotation sensor, the resultant shaking may be suppressed.
- the present invention is useful for the case that the magnetic pole position of the motor as the drive unit is estimated for driving operation.
- so called vector control is executed for the general torque control or speed control of the motor as the permanent magnet synchronous motor.
- the magnetic pole is detected by the rotation sensor.
- the detection error of the rotation sensor attached to the synchronous motor with respect to the magnetic pole position may influence the compensation torque.
- the large detection error and the error in estimation with respect to the magnetic pole position through sensor-less driving operation may cause shaking of the car.
- the current value kept constant for the magnetic pole position estimation is output immediately after execution of step S101, and the brake is gradually released by the control unit to bring the unbalance torque as the difference between the car and the counterweight into activated state under the weakening braking force.
- the control unit subjects the torque command to the follow-up control to allow slow follow-up to the unbalance torque without causing sharp torque change. This makes it possible to make the acceleration change owing to torque gentle.
- large torque is not required, and shaking may be lessened without generating high acceleration under the active braking force.
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Computer Networks & Wireless Communication (AREA)
- Civil Engineering (AREA)
- Mechanical Engineering (AREA)
- Structural Engineering (AREA)
- Elevator Control (AREA)
Claims (3)
- Ascenseur comprenant :une cabine (104) ;une unité d'entraînement (103) pour déplacer la cabine (104) en faisant tourner un corps rotatif relié à la cabine (104) ;un frein (102) pour appliquer une force de freinage au corps rotatif ;une unité de commande d'ascenseur (2) pour commander un fonctionnement de la cabine (104) ; etune unité de commande de frein (20) pour modifier un couple de freinage du frein (102) pas à pas pour le libérer lors de la réception d'un signal de démarrage de l'ascenseur à partir de l'unité de commande d'ascenseur (2) ;une unité de commande de couple (23) configurée pour commander un couple de l'unité d'entraînement (103) de sorte que la vitesse de la cabine (104) approche zéro, lors d'une réception du signal de démarrage de l'ascenseur à partir de l'unité de commande d'ascenseur (2) ; et caractérisé en ce qu'il comprend en outreun commutateur de contrôle de frein (8) configuré pour détecter un état de contact entre le frein (102) et le corps rotatif, dans lequel l'unité de commande de couple (23) est configurée pour commander le couple de l'unité d'entraînement (103) de sorte que la vitesse de la cabine (104) approche zéro après détection de la séparation du frein (102) à partir du corps rotatif par le commutateur de contrôle de frein (8), jusqu'à réception d'une commande de déplacement de l'ascenseur.
- Ascenseur selon la revendication 1, dans lequel dans le cas où le commutateur de contrôle de frein (8) détecte une séparation du frein (102) à partir du corps rotatif, l'unité de commande de frein (20) libère complètement le frein (102) à partir du corps rotatif.
- Ascenseur selon la revendication 1, dans lequel l'unité de commande de frein (20) détermine un processus de commande de frein consistant à libérer progressivement le frein (102) à partir du corps rotatif sur la base d'informations stockées dans une base de données d'informations de type de l'unité de commande de frein (20).
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016155183A JP2018024483A (ja) | 2016-08-08 | 2016-08-08 | エレベーター |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3287403A1 EP3287403A1 (fr) | 2018-02-28 |
| EP3287403B1 true EP3287403B1 (fr) | 2021-06-30 |
Family
ID=59350791
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP17181466.8A Active EP3287403B1 (fr) | 2016-08-08 | 2017-07-14 | Ascenseur |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP3287403B1 (fr) |
| JP (1) | JP2018024483A (fr) |
| CN (1) | CN107697772B (fr) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110510465B (zh) * | 2019-08-09 | 2022-02-18 | 深圳市海浦蒙特科技有限公司 | 一种强驱电梯启动控制方法和系统 |
| CN115043279B (zh) * | 2022-07-19 | 2023-01-06 | 广州永日电梯有限公司 | 一种电梯起动的力矩补偿控制方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57117476A (en) * | 1981-01-09 | 1982-07-21 | Hitachi Ltd | Controller for elevator |
| JPH0780650B2 (ja) * | 1990-08-13 | 1995-08-30 | 日本オーチス・エレベータ株式会社 | エレベータ制御装置のブレーキ制御方式 |
| DE69401667T2 (de) * | 1993-03-04 | 1997-05-28 | Otis Elevator Co | Vorstromdrehmoment für Aufzugsantrieb zur Vermeidung eines Gleitens nach oben wie nach unten |
| JP2001122536A (ja) * | 1999-10-21 | 2001-05-08 | Toshiba Corp | エレベータの制御装置 |
| JP2002044975A (ja) * | 2000-07-26 | 2002-02-08 | Fuji Electric Co Ltd | 誘導電動機の制御装置 |
| JP2006335553A (ja) * | 2005-06-06 | 2006-12-14 | Yaskawa Electric Corp | エレベータ制御装置とその制御方法 |
| KR101657020B1 (ko) * | 2012-08-29 | 2016-09-12 | 미쓰비시덴키 가부시키가이샤 | 엘리베이터의 제어 장치 및 엘리베이터의 제어 방법 |
| JP2015000796A (ja) | 2013-06-17 | 2015-01-05 | 三菱電機株式会社 | エレベーター |
| JP6218706B2 (ja) * | 2013-11-26 | 2017-10-25 | 三菱電機株式会社 | エレベータの制御装置およびエレベータの制御方法 |
| CN104671022B (zh) * | 2013-11-26 | 2017-04-12 | 三菱电机株式会社 | 电梯的控制装置及电梯的控制方法 |
-
2016
- 2016-08-08 JP JP2016155183A patent/JP2018024483A/ja active Pending
-
2017
- 2017-07-14 EP EP17181466.8A patent/EP3287403B1/fr active Active
- 2017-07-31 CN CN201710638748.8A patent/CN107697772B/zh not_active Expired - Fee Related
Non-Patent Citations (1)
| Title |
|---|
| None * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107697772B (zh) | 2019-11-19 |
| CN107697772A (zh) | 2018-02-16 |
| JP2018024483A (ja) | 2018-02-15 |
| EP3287403A1 (fr) | 2018-02-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9771243B2 (en) | Elevator safety arrangement for controlling elevator movement | |
| JP3936578B2 (ja) | エレベータ巻上機・制御システム | |
| CN108698790B (zh) | 电梯以及救援运转控制方法 | |
| CN104520223B (zh) | 电梯的控制装置及电梯的控制方法 | |
| EP3566993B1 (fr) | Synchronisation basée sur la distance d'un ensemble d'aimants au rail | |
| JP5196914B2 (ja) | エレベータ制御装置 | |
| EP3287403B1 (fr) | Ascenseur | |
| JP5079288B2 (ja) | エレベータ装置 | |
| CN107697752B (zh) | 电梯系统 | |
| KR101233558B1 (ko) | 엘리베이터 장치 | |
| WO2020065788A1 (fr) | Dispositif de commande d'ascenseur et ascenseur l'utilisant | |
| JP6297942B2 (ja) | エレベータ制御装置 | |
| JP2008222358A (ja) | エレベーターの制御装置 | |
| JP6351391B2 (ja) | エレベータ制御装置とその制御方法 | |
| CN204342203U (zh) | 用于控制弹簧加载制动器的装置 | |
| JP6655489B2 (ja) | エレベーター | |
| JPWO2018154621A1 (ja) | エレベーター | |
| JP6578260B2 (ja) | エレベーターシステムおよびその制御方法 | |
| JP7538093B2 (ja) | エレベータ用待機型ブレーキの試験方法および試験装置 | |
| CN110402229B (zh) | 电梯的控制装置以及曳引绳索的伸缩量估计方法 | |
| CN118723738A (zh) | 方法和电梯装置 | |
| WO2023284938A1 (fr) | Solution de sécurité pour ascenseurs | |
| CN116963983A (zh) | 电梯装置 | |
| WO2020245495A1 (fr) | Commande d'un système d'ascenseur | |
| JPH0958938A (ja) | エレベータの制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20170802 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20200519 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20201217 |
|
| GRAJ | Information related to disapproval of communication of intention to grant by the applicant or resumption of examination proceedings by the epo deleted |
Free format text: ORIGINAL CODE: EPIDOSDIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| INTC | Intention to grant announced (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20210330 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1406199 Country of ref document: AT Kind code of ref document: T Effective date: 20210715 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602017041117 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210930 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20210630 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1406199 Country of ref document: AT Kind code of ref document: T Effective date: 20210630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211001 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211102 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602017041117 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20210731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210731 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210731 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20210930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210714 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 |
|
| 26N | No opposition filed |
Effective date: 20220331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210714 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210930 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210731 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20220609 Year of fee payment: 6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20220531 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20170714 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602017041117 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240201 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210630 |