EP3127461B1 - Verfahren zum betreiben eines tragbaren hartflächenabsauggeräts und hartflächenabsauggerät zur durchführung des verfahrens - Google Patents
Verfahren zum betreiben eines tragbaren hartflächenabsauggeräts und hartflächenabsauggerät zur durchführung des verfahrens Download PDFInfo
- Publication number
- EP3127461B1 EP3127461B1 EP16185140.7A EP16185140A EP3127461B1 EP 3127461 B1 EP3127461 B1 EP 3127461B1 EP 16185140 A EP16185140 A EP 16185140A EP 3127461 B1 EP3127461 B1 EP 3127461B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- hard surface
- cleaning device
- vacuum cleaning
- surface vacuum
- suction unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L1/00—Cleaning windows
- A47L1/02—Power-driven machines or devices
- A47L1/05—Hand apparatus with built-in electric motors
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4011—Regulation of the cleaning machine by electric means; Control systems and remote control systems therefor
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
- A47L11/4044—Vacuuming or pick-up tools; Squeegees
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L5/00—Structural features of suction cleaners
- A47L5/12—Structural features of suction cleaners with power-driven air-pumps or air-compressors, e.g. driven by motor vehicle engine vacuum
- A47L5/22—Structural features of suction cleaners with power-driven air-pumps or air-compressors, e.g. driven by motor vehicle engine vacuum with rotary fans
- A47L5/24—Hand-supported suction cleaners
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L7/00—Suction cleaners adapted for additional purposes; Tables with suction openings for cleaning purposes; Containers for cleaning articles by suction; Suction cleaners adapted to cleaning of brushes; Suction cleaners adapted to taking-up liquids
- A47L7/0004—Suction cleaners adapted to take up liquids, e.g. wet or dry vacuum cleaners
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
Definitions
- the invention relates to a method for operating a portable Hartvidabsaug réelles for aspirating a liquid-air mixture of a hard surface, in particular of a window, the Hartvidabsaug réelle a suction nozzle with at least one can be pressed against the hard surface flexible wiper lip, a suction unit and in the flow path between the suction nozzle and the suction unit arranged separating means, which is preferably connected via a liquid outlet with a dirty liquid tank, and wherein the Hartvidabsaug réelle comprises a control device for switching on and off of the suction unit and at least one rechargeable battery for powering the suction unit.
- the invention relates to a portable Hart vomabsaug réelle for performing the above method.
- Portable Hart vomabsaugered with a suction nozzle, a suction unit and a arranged in the flow path between the suction nozzle and the suction device are used for suction of hard surfaces, especially for vacuuming tiled walls or floors, and also for removing a water film from a glass surface, in particular from a window pane or a mirror.
- the suction nozzle has at least one wiper lip, which can be pressed against the hard surface and guided along it.
- the suction nozzle is in flow communication with a suction unit, under the action of which a negative pressure can be generated, so that a liquid-air mixture can be sucked in via the suction nozzle into a housing of the hard surface suction device.
- a separation device In the flow path between the suction nozzle and the suction unit is a separation device, which has at least one separation element.
- the separation element is usually arranged in a separation chamber, which can be acted upon by the suction unit with negative pressure.
- liquid can be separated from the aspirated liquid-air mixture.
- the separated liquid can preferably pass through a liquid outlet opening into a dirty liquid tank of the hard surface suction device, which is used in addition to the suction device and which is preferably arranged outside the flow path between the suction nozzle and the suction unit.
- the power supply of the suction unit takes place with the aid of at least one rechargeable battery and for switching on and off of the suction unit, a control device is used.
- Such Hart vomunabsaugered are from the publications WO 2009/086891 A1 .
- WO 2009/086892 A1 and WO 2009/086893 A1 known and have proven themselves in practice.
- window panes and mirror surfaces can be effectively cleaned with their help.
- the user guides the hard surface suction device along the window pane or mirror surface, pressing the at least one stripper lip against the window pane or the mirror surface.
- a water film located on the window pane or the mirror surface can be effectively sucked off and transferred into the dirty liquid tank. The latter can be emptied if necessary.
- the control of the suction unit is done by means of the control device.
- This usually includes a mechanical on-off switch or a mechanical button that must be operated by the user to start the suction unit.
- the service life of the Hart vomabsaug réelles is limited by the charging capacity of the at least one rechargeable battery and the energy consumption of the suction unit.
- Object of the present invention is to provide a method of the type mentioned and a Hart vomabsaug réelle for performing the method such that the energy consumption of the portable Hartvidabsaug réelles can be reduced.
- the object underlying the invention is achieved in that a resulting from the pressing of the at least one wiper lip against the hard surface mechanical stress of Hartvidabsaug réelles is detected and in the presence of this mechanical stress, the suction unit is turned on automatically.
- the detection of the mechanical stress of the Hartvidabsaug réelles when pressing the at least one wiper lip against the hard surface makes it possible to set the suction unit only when an actual water film is to be sucked from the hard surface.
- the duty cycle of the suction unit can be limited, thereby reducing the energy consumption of the Hartvidabsaug réelles.
- the pressing of the at least one flexible wiper lip against the hard surface leads to a reaction force, with which the Hart vomabsaug réelle, in particular the suction nozzle and / or the separator, are acted upon. It can be provided, for example, that the acting reaction force is detected with the aid of at least one force transducer and then the suction unit is set in motion.
- the suction unit is automatically switched off.
- the mechanical stress of the Hartvidabsaug réelles deleted in such a configuration as soon as the at least one wiper lip is removed from the hard surface. In this case, it is no longer necessary to maintain a suction flow from the suction nozzle to the suction unit, but the suction unit can be turned off.
- the Hartvidabsaug réelle is put into operational readiness in a first process step and then the suction unit is automatically turned on in the presence of a resulting from the pressing of the at least one wiper lip against the hard surface mechanical stress of Hartvidabsaug réelles.
- the Hartvidabsaug réelle is only automatically set in motion when the Hartvidabsaug réelle was previously set to operational readiness. If there is still no operational readiness, pressing the at least one wiper lip against the hard surface does not yet result in the suction unit being switched on. If the operational readiness is terminated before the at least one wiper lip is removed from the hard surface, the suction unit is nevertheless switched off.
- the Hart vomunabsaugêt is manually put into operation.
- a main switch can be used, which can be operated by the user.
- the automatic switching on and off of the suction unit then takes place only after previous manual operation of the main switch.
- the Hartvidabsaug réelle can also be offset by means of a touch sensor, for example by means of a capacitive sensor, ready for operation, with the help of the touch sensor, the manual gripping of the Hartvidabsaug réelles is detected by the user.
- the hard surface aspirator includes a handle on which the user grips the portable hard surface aspirator.
- the touch sensor is preferably arranged on the handle or this immediately adjacent, so that it detects the gripping of the handle by the user and then the Hartroisabsaug réelle can be put into operational readiness. If the user sets aside the hard surface suction device, the touch sensor provides a signal that causes the hard surface suction device to stop operating automatically, in which case the suction unit is switched off.
- the Hartvidabsaug réelle is automatically switched off after a predetermined or predetermined time interval.
- the actual cleaning process in which the at least one wiper lip is pressed against the hard surface, even with large hard surfaces, for example, when cleaning large windows, usually less than a minute, since the user then changes its position relative to the hard surface and in this case the at least one wiper lip away from the hard surface.
- the predetermined time interval lasts less than one minute, preferably only about half a minute. If the time interval has expired, the suction unit is automatically switched off. It can then be switched on again as soon as it is again pressed against the hard surface and thereby again a mechanical stress of the Hartvidabsaug réelles occurs.
- the suction unit is automatically turned off.
- the idea flows in that after completion of a cleaning process, the user usually turns off the hard surface suction device on a floor space, so that it subsequently stops moving in the room. Lies this situation for a given or predeterminable time interval before, the suction unit can then be turned off automatically.
- the mechanical stress of the Hartvidabsaug réelles when pressing the at least one wiper lip against the hard surface can lead to a relative movement between two components of Hartvidabsaug réelles, in particular to a relative movement between two housing parts of Hartvidabsaug réelles.
- the relative movement between the two components resulting from the pressing of the at least one wiper lip against the hard surface is detected and then the suction unit is switched on automatically.
- the Hartvidabsaug réelle may, for example, a first and a second housing part, which are detachably connectable to each other, wherein they are slightly movable in the connected state, that is in the millimeter or Submillimeter Scheme, relative to each other. If the at least one wiper lip is pressed against a hard surface at the beginning of a cleaning process, the two housing parts carry out a slight relative movement with respect to one another. This relative movement can be detected by sensors and serve as a start signal for the suction unit.
- the two relatively movable components in the absence of mechanical stress of the Hartvidabsaug réelles automatically, for example due to the action of a resilient restoring force assume a predetermined position relative to each other, because they perform a renewed relative movement, as soon as the at least one wiper lip is removed from the hard surface, and this relative movement again can serve as a stop signal for the suction unit, so that the suction unit is turned off when the two relatively movable components resume their initial position, they had taken before the start of the cleaning process.
- the relative movement between the two components is conveniently electromechanical, piezoelectric, optical, inductive, and / or capacitive detected.
- An electromechanical detection for example by means of a microswitch or a potentiometer, in particular a Folienpotentiometers, is advantageous.
- an elastic deformation of a component of the Hartvidabsaug réelles is detected in an advantageous embodiment of the method according to the invention resulting from the pressing of the at least one wiper lip and then the suction unit is turned on automatically.
- the at least one wiper lip is designed to be flexible and is subject to an elastic deformation when pressed against the hard surface. This deformation can be detected to start the suction unit.
- the reaction force acting on the hard surface suction device and the component which has elastically deformed when pressing the at least one wiper lip against the hard surface are no longer present.
- the elimination of the deformation can serve as a stop signal for the suction unit, so that it is turned off as soon as the detected deformation of the component is eliminated.
- the elastic deformation of the at least one component of the Hart vomabsaug réelles is conveniently electromechanical, piezoelectric, optical, inductive and / or capacitive detected.
- an electro-mechanical detection for example by means of a strain gauge, is advantageous.
- Such strain gauges are produced inexpensively in very large quantities and are known to those skilled in the art. With their help, a mechanical stress can be detected in a structurally simple way be subjected to the Hard direabsaug réelle when pressing the at least one wiper lip against the hard surface.
- the invention also relates to a portable Hartvidabsaug réelle for performing the method.
- the portable Hartvidabsaug réelle is suitable for aspirating a liquid-air mixture of a hard surface, in particular of a window, and comprises a suction nozzle with at least one pressable to the hard surface flexible wiper lip, a suction unit and a arranged in the flow path between the suction nozzle and the suction unit, the is preferably connected via a liquid outlet with a dirty liquid tank.
- the Hartvidabsaug réelle comprises a control device for switching on and off of the suction unit and at least one rechargeable battery for powering the suction unit.
- the control device comprises a stress detecting device, wherein by means of the stress detecting device resulting from the pressing of the at least one wiper lip against the hard surface resulting mechanical stress of Hartvidabsaug réelles detected and the suction unit is switched on automatically by means of the stress detection device.
- the power consumption of Hart vomabsaugillons can be reduced, because the stress detection device allows the suction unit only turn on when actually a suction flow from the suction nozzle to the suction unit should be present. This is the case when the at least one wiper lip is pressed against the hard surface. As long as the at least one wiper lip still occupies a distance from the hard surface is a suction flow is not necessary and the suction unit is therefore not turned on automatically.
- the suction unit is automatically switched off by eliminating the detected mechanical stress by means of the stress detection device.
- the absence of mechanical stress of the hard surface suction device is detected by the load detection device.
- the mechanical stress is eliminated as soon as the at least one wiper lip is removed from the hard surface. This can, as already explained, serve as a stop signal for the suction unit.
- the suction unit is thus only in operation, as long as the at least one wiper lip is pressed against the hard surface.
- the Hartvidabsaug réelle by the user in operational readiness displaceable and the suction unit is automatically switched on and / or off only in the presence of operational readiness by means of the stress detection device.
- the Hartvidabsaug réelle can be initially put into operational readiness by the user. If the operational readiness is present, the suction unit can then be switched on automatically by means of the load detection device and preferably also automatically switched off again. If the Hartvidabsaug réelle has not been put into operational readiness, an automatic switching on and / or off of the suction unit by means of the stress detection device is not possible. If the operational readiness is terminated by the user, the suction unit is switched off regardless of an output signal of the stress detecting device in each case.
- the Hartvidabsaug réelle has a switching device, in particular a main switch, which is manually operated by the user, wherein the Hartvidabsaug réelle is set in operational readiness by the operation of the switching device.
- the Hartvidabsaug réelle has a touch sensor, in particular a capacitive touch sensor, wherein the touch sensor grasping the Hartvidabsaug réelles detected by the user and thereby the Hartvidabsaug réelle is set into operational readiness.
- the touch sensor is disposed on a handle of the Hart vomabsaug réelles or the handle immediately adjacent.
- the handle is conveniently umgreifbar by the user.
- this includes a timer and the suction unit is automatically switched off after a predetermined or predetermined time interval.
- the Hartvidabsaug réelle in addition to a timer on at least one motion sensor, wherein by means of the at least one motion sensor movement of Hartvidabsaug réelles detected in space and the suction unit after a predetermined or predetermined time interval in which the Hartvidaug réelle was not moved, automatically switched off is.
- a timer and one or more motion sensors it can be ensured by the use of a timer and one or more motion sensors that the suction unit is reliably switched off as soon as the hard surface suction device has not been moved for longer than a predetermined or specifiable time interval. The latter is the case, for example, when the user places the hard surface suction device on a floor space.
- the Hart vomadosaug réelle on a first and a second component which are movable by pressing the at least one wiper lip against the hard surface relative to each other, and the stress detecting device comprises at least one detecting member on, by means of the detection member, the relative movement of the two components can be detected. If the at least one wiper lip is pressed against the hard surface, then a first component, relative to a second component, is subject to a relative movement, which is detected by at least one detection member in such an embodiment of the hard surface suction device. A corresponding output signal of the detection member can then serve as a start signal for the suction unit, so that this is turned on as soon as the relative movement has been detected.
- the relative movement of the two components can advantageously be detected electromechanically, piezoelectrically, inductively and / or capacitively by means of the at least one detection element.
- an electromechanical detection of the relative movement is advantageous.
- the at least one detection element can be designed, for example, as a microswitch and / or as a potentiometer, in particular in the form of a film potentiometer.
- the at least one detection member is conveniently arranged between the two relatively movable components, so that at least one of the two components can act directly on the detection member, for example on the switching rod of a microswitch.
- the two components are configured as housing parts of the hard surface suction device.
- a first housing part, the separation device and a second housing part receives the suction unit, wherein the first housing part is movable relative to the second housing part.
- the two housing parts are conveniently releasably connectable to each other, and they can perform a relative movement in the millimeter or submillimeter range in the connected state.
- the Hartvidabsaug réelle has at least one by pressing the at least one wiper lip against the hard surface elastically deformable component and that the stress detecting device has at least one deformation sensor, wherein by means of the deformation sensor, the deformation the deformable component is detectable.
- the deformation can be very slight, for example, the deformable component can deform by fractions of a millimeter when the at least one wiper lip is pressed against the hard surface, wherein this slight deformation can be detected by the deformation sensor in a touch or contactless manner.
- the deformation of the deformable component can be detected electromechanically, piezoelectrically, inductively and / or capacitively by means of the at least one deformation sensor.
- the at least one deformation sensor is designed as a strain gauge.
- such strain gauges are available at low cost.
- At least one deformation sensor is integrated in a wiper lip of the hard surface suction device. If the wiper lip is pressed against the hard surface, it is subject to elastic deformation, which can be detected directly by the deformation sensor integrated in the wiper lip.
- the wiper lip can be made, for example, from a rubber-elastic material, wherein the deformation sensor is completely surrounded by the rubber-elastic material.
- At least one deformation sensor is fixed in an advantageous embodiment to a housing part of the Hart vomabsaug réelles, wherein the housing part is subject to the pressing of the at least one wiper lip against the hard surface of an elastic deformation.
- the optionally occurring only in the range of fractions of a millimeter elastic deformation of the housing part can be detected by the deformation sensor attached to it, for example by a strain gauge.
- the output signal of the deformation sensor can then serve as a start signal for the operation of the suction unit.
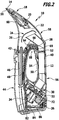
- FIGS. 1 to 3 is schematically illustrated a first advantageous embodiment of a portable Hartvidaug réelles invention, which is generally occupied by the reference numeral 10.
- a liquid film from a hard surface in particular from a window pane, be sucked. It can do this by the user be held with one hand on a handle 12 and includes a wiper lip 14 and a support lip 16 which can be pressed against the hard surface to be cleaned and guided along this.
- the wiper lip 14 and the support lip 16 form the free end of a suction nozzle 18.
- a suction channel 20 connects, which dips into a deposition chamber 22.
- a separation device 24 with a separation element in the form of a baffle 26 is arranged.
- the suction unit 30 has a suction turbine 32, which is rotated by a motor 34 in rotation.
- a suction flow can be achieved which extends through the suction channel 20, the separation chamber 22 and the vacuum line 28 to the suction unit 30.
- a control device 36 which in addition to the below the motor 34 arranged electrical components has a detail further explained below stress detection device 38 having a detection member in the form of a micro-switch 40.
- the separation chamber 22 is in communication with a dirty liquid tank 44.
- the dirty liquid tank 44 can be filled with the aid of an inlet tube 46 with liquid which is deposited in the separation chamber 22 from the liquid-air mixture, which is sucked under the action of the suction unit 30 via the suction nozzle 18 into the separation chamber 22.
- the separated liquid can pass via the inlet pipe 46 into the dirty liquid tank 44 and the sucked air can be discharged via the vacuum line 28, the suction unit 30 and this downstream in the flow direction air outlet openings 47.
- air in the dirty liquid tank 44 can be discharged to the separation chamber 22 when the level of the liquid tank 44 increases during use of the hard surface suction device 10.
- the Hart vomabsaug réelle 10 has a handle opening 50, which facilitates the grip of the handle 12.
- an electromechanical switch 52 is arranged, which can be actuated by the user when gripping the handle 12.
- the Hartvidaug réelle 10 can be put into operation.
- touch sensor 54 may be arranged, by means of which the gripping of the handle 12 can be detected.
- electrical connection lines is the button 52 and, alternatively, the contact sensor 54 is connected to the motor 34 arranged below the electrical components of the control device 36.
- the Hart vomabsaug réelle 10 further comprises a first component in the form of a housing lower part 56 and a second component in the form of a housing upper part 58.
- the lower housing part 56 receives the suction unit 30 and forms the handle 12, and the upper housing part 58 receives the deposition chamber 22 with the separator 24 ,
- the suction nozzle 18 is attached, which has a in FIG. 2 schematically illustrated upper latching connection 60 is detachably connected to the upper housing part 58.
- the upper housing part 58 has an in FIG. 1 schematically illustrated lower latching connection 62 releasably connected to the lower housing part 56.
- the upper housing part 58 sits with an arcuately curved bottom wall 64 on an arcuately curved top wall 66 of the housing lower part 56. If the upper housing part 58 is connected to the lower housing part 56, it may relative to the lower housing part 56 a slight pivoting movement about a perpendicular to the plane of the FIG. 2 aligned pivot axis Run 58, wherein the bottom wall 64 of the housing upper part 58 slides along the top wall 66 of the housing base 56.
- a microswitch 40 is arranged on the side of the handle 12 facing away from the pushbutton 52. If the wiper lip 14 is pressed against the hard surface to clean a hard surface, then the upper housing part 58 makes a slight relative movement in the form of a pivoting movement about the pivot axis 68 relative to the lower housing part 56. This relative movement is detected by the microswitch 40, which changes its switching position as a result of this relative movement. This change in the switching position has the consequence that the suction unit 30 is turned on after the user has previously set by means of the button 52, the Hart vomabsaug réelle 10 in standby. The activation of the suction unit 30 thus takes place in the in the FIGS.
- FIG. 3 illustrated embodiment by detecting the taking place when pressing the wiper lip 14 against a hard surface stress of the Hartvidaug réelles 10, which has a relative movement of the upper housing part 58 relative to the lower housing part 56 result. This is especially true of the in FIG. 3 shown block diagram clearly.
- FIG. 3 shows the motor 34 of the suction unit 30, which is connected via a supply line 70 with a side of the motor 34 arranged rechargeable battery 72.
- a controllable switching unit 74 is connected, the control input 76 is connected to a data processing element 78.
- the data processing element 78 comprises a timer 80 and is connected on the input side to the microswitch 40 and to an acceleration sensor 82 which is positioned with the interposition of a vibration damping element 84 on a printed circuit board 86 arranged below the motor 34 in the housing lower part 56.
- the suction unit 30 can be switched on and off automatically as soon as the user by pressing the button 52, the operational readiness of Hart vomabsaug réelles 10 has made.
- the operational readiness of the hard surface suction device 10 can be established by the user grasping the handle 12, as this can be detected by the touch sensor 54, which is used as an alternative to the button 52 and in FIG. 3 is shown in dashed lines.
- a spring element 69 is arranged, which exerts on the upper housing part 58 a resilient restoring force, under the action of the upper housing part 58 occupies a front pivot position, in which it releases the micro-switch 40. If the wiper lip 14 is pressed during a cleaning process by the user against a hard surface to be cleaned, the upper housing part 58 performs a slight pivoting movement about the pivot axis 68 against the action of the spring element 69, wherein the switch plunger of the microswitch 40 is actuated.
- a corresponding output signal of the microswitch 40 is passed to the data processing element 78 via signal lines, not shown in the drawing to achieve a better overview, which then provides the controllable switching unit 74 with a control signal so that it releases the electrical connection between the battery 72 and the motor 34 ,
- the suction unit 30 is automatically turned on by means of the control device 36 as soon as the Hart vomabsaug réelle 10 experiences a mechanical stress by pressing the wiper lip 14 against the hard surface, which has a relative movement of the upper housing part 58 relative to the lower housing part 56 result.
- a prerequisite for the automatic activation of the suction unit 30 is that previously the operational readiness of the hard surface suction device 10 was established.
- the operation of the suction unit 30 is terminated as soon as the user removes the wiper lip 14 from the hard surface, because then eliminates the mechanical stress of the Hartvidabsaug réelles 10 and the housing upper part 58 takes under the action of the spring element 69 its initial position in which it is the switch plunger of the Microswitch 40 releases.
- a corresponding output signal of the microswitch 40 is then from the data processing element 78, which then interrupts the electrical connection between the battery 72 and the motor 34 by means of the controllable switching unit 74.
- the operation of the suction unit 30 is automatically terminated if the Hart vomabsaug réelle 10 is not moved longer than a predetermined time by the timer 80 in space.
- the movement of the Hartvidabsaug réelles 10 in space is detected by the acceleration sensor 82. If the Hartvidabsaug réelle 10 is not moved, it is subject only to the acceleration of gravity, without any change in acceleration takes place.
- the missing acceleration change is detected by the data processing member 78 and at the end of the predetermined time interval is output by the data processing member 78, a control signal, under the action of the controllable switching unit 74 also interrupts the electrical connection between the battery 72 and the motor 34.
- the operation of the suction unit 30 thus takes place only if, on the one hand, the operational readiness of the Hartvidaug réelles 10 was prepared and on the other the wiper lip 14 is pressed against a hard surface, so that the Hartvidaug réelle 10 is subject to mechanical stress. If the mechanical stress drops away as the user removes the wiper lip 14 from the hard surface, the suction unit 30 is automatically switched off.
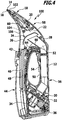
- FIGS. 4 and 5 a second advantageous embodiment of a Hart vomabsaug réelles invention is shown, the total with the reference numeral 100 is occupied.
- the Hart vomabsaug réelle 100 is designed substantially identical to that described above with reference to the FIGS. 1 to 3 described Hart vomabsaug réelle 10.
- For identical components are therefore in the FIGS. 4 and 5 the same reference numerals as in the FIGS. 1 to 3 and with respect to these components, reference is made to the foregoing explanations to avoid repetition.
- the Hart vomabsaug réelle 10 differs from the Hart vomabsaug réelle 100 fact that instead of the microswitch 40, with which a movement of the upper housing part 58 can be detected relative to the housing base 56, a deformation sensor in the form of a strain gauge 102 is used, which is integrated into the flexible wiper lip 14 and detects their elastic deformation during pressing against the hard surface.
- the strain gauge 102 is in electrical connection with the data processing element 78 via a measuring line, not shown in the drawing to achieve a better overview, and provides a measuring signal when the stripper lip 14 is deformed, which is detected by the data processing element 78.
- the upper housing part 58 with the lower housing part 56 is releasably connectable.
- the upper housing part 58 is subject to a slight elastic deformation.
- strain gauges 102 may in the in the FIGS. 4 and 5 embodiment shown, a strain gauge 104 are used, which is fixed below the wiper lip 14 on the inside of the handle 12 remote from the housing wall 106 of the housing upper part 58.
- the strain gauge 104 is in FIG. 4 shown in dashed lines.
- strain gauge 104 can be detected from the pressing of the wiper lip 14 against a hard surface mechanical stress of Hartvidaug réelles 100, and the output of the strain gauge 104 in the same way as the output signal of the strain gauge 102 for automatically switching on and off of the suction unit 30th be used.
- the control device 108 of the hard surface suction device 100 is in FIG. 5 shown in the form of a block diagram.
- An acceleration sensor 82 is omitted in Hartvidabsaug réelle 100.
- the suction unit 30 is the Hartvidabsaug réelle 100 reliably on and off automatically due to the output signals of the strain gauge 102 and / or the strain gauge 104.
- the wiper lip 14 When pressing the wiper lip 14 against the hard surface, the wiper lip 14 as well as the upper housing part subject
- the elastic deformation, which is detected by the strain gauges 102, 104, and the removal of the wiper lip 14 from the hard surface eliminates the elastic deformation, which is also detected by the strain gauges 102, 104.
- the suction unit 30 can thus be switched on and off in a simple manner.
- a prerequisite for the automatic switching on and off of the suction unit 30 is also in Hart vomabsaug réelle 100, which has made the user ready for operation, either by means of the button 52 or through Grasping the handle 12, if the touch sensor 54 is used.
- the timer 80 is used in Hart vomabsaug réelle 100 as additional safety shutdown, with which it is ensured that the suction unit 10 is switched off regardless of a possible mechanical stress of the Hartvidabsaug réelles 100 after a predetermined time interval.
- the suction unit 30 can be automatically switched on and off by the detection of the mechanical stress, which is subject to the Hartvidabsaug réelle 10 or 100 when pressing the wiper lip 14 against a hard surface.
- the battery 72 is thus discharged only during the actual cleaning process, so that the power consumption of the Hartvidabsaug réelle 10 and 100 can be kept low.
- the Hartvidabsaugsammlung 10 and 100 are characterized by easy handling.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Hooks, Suction Cups, And Attachment By Adhesive Means (AREA)
Description
- Die Erfindung betrifft ein Verfahren zum Betreiben eines tragbaren Hartflächenabsauggeräts zum Absaugen eines Flüssigkeits-Luftgemisches von einer Hartfläche, insbesondere von einer Fensterscheibe, wobei das Hartflächenabsauggerät eine Saugdüse mit mindestens einer an die Hartfläche anpressbaren flexiblen Abstreiflippe, ein Saugaggregat sowie eine im Strömungsweg zwischen der Saugdüse und dem Saugaggregat angeordnete Abscheideeinrichtung aufweist, die vorzugsweise über eine Flüssigkeitsauslassöffnung mit einem Schmutzflüssigkeitstank verbunden ist, und wobei das Hartflächenabsauggerät eine Steuereinrichtung zum Ein- und Ausschalten des Saugaggregats und mindestens eine wiederaufladbare Batterie zur Energieversorgung des Saugaggregats umfasst.
- Außerdem betrifft die Erfindung ein tragbares Hartflächenabsauggerät zur Durchführung des voranstehend genannten Verfahrens.
- Tragbare Hartflächenabsauggeräte mit einer Saugdüse, einem Saugaggregat und einer im Strömungsweg zwischen der Saugdüse und dem Saugaggregat angeordneten Abscheideeinrichtung kommen zum Absaugen von Hartflächen zum Einsatz, insbesondere zum Absaugen gefliester Wände oder Böden, und auch zum Entfernen eines Wasserfilms von einer Glasfläche, insbesondere von einer Fensterscheibe oder einem Spiegel. Die Saugdüse weist hierzu mindestens eine Abstreiflippe auf, die gegen die Hartfläche gepresst und an dieser entlanggeführt werden kann. Die Saugdüse steht mit einem Saugaggregat in Strömungsverbindung, unter dessen Wirkung ein Unterdruck erzeugt werden kann, so dass ein Flüssigkeits-Luftgemisch über die Saugdüse in ein Gehäuse des Hartflächenabsauggeräts eingesaugt werden kann. Im Strömungsweg zwischen der Saugdüse und dem Saugaggregat befindet sich eine Abscheideeinrichtung, die mindestens ein Abscheideelement aufweist. Das Abscheideelement ist üblicherweise in einer Abscheidekammer angeordnet, die vom Saugaggregat mit Unterdruck beaufschlagt werden kann. Mit Hilfe des mindestens einen Abscheideelements kann Flüssigkeit aus dem eingesaugten Flüssigkeits-Luftgemisch abgeschieden werden. Die abgeschiedene Flüssigkeit kann vorzugsweise über eine Flüssigkeitsauslassöffnung in einen Schmutzflüssigkeitstank des Hartflächenabsauggeräts gelangen, der zusätzlich zur Absaugeinrichtung zum Einsatz kommt und der vorzugsweise außerhalb des Strömungswegs zwischen der Saugdüse und dem Saugaggregat angeordnet ist. Die Energieversorgung des Saugaggregats erfolgt mit Hilfe von mindestens einer wiederaufladbaren Batterie und zum Ein- und Ausschalten des Saugaggregats kommt eine Steuereinrichtung zum Einsatz.
- Derartige Hartflächenabsauggeräte sind aus den Veröffentlichungen
WO 2009/086891 A1 ,WO 2009/086892 A1 undWO 2009/086893 A1 bekannt und haben sich in der Praxis bewährt. Insbesondere Fensterscheiben und Spiegelflächen können mit ihrer Hilfe wirkungsvoll gereinigt werden. Der Benutzer führt das Hartflächenabsauggerät an der Fensterscheibe bzw. an der Spiegelfläche entlang, wobei er die mindestens eine Abstreiflippe gegen die Fensterscheibe bzw. die Spiegelfläche presst. Auf diese Weise kann ein auf der Fensterscheibe bzw. der Spiegelfläche befindlicher Wasserfilm wirkungsvoll abgesaugt und in den Schmutzflüssigkeitstank überführt werden. Letzterer kann bei Bedarf entleert werden. - Die Steuerung des Saugaggregats erfolgt mit Hilfe der Steuereinrichtung. Diese umfasst üblicherweise einen mechanischen Ein-Ausschalter oder einen mechanischen Taster, der vom Benutzer zum Ingangsetzen des Saugaggregates betätigt werden muss.
- Die Betriebsdauer des Hartflächenabsauggeräts ist durch die Ladekapazität der mindestens einen wiederaufladbaren Batterie und durch den Energieverbrauch des Saugaggregats begrenzt.
- Aufgabe der vorliegenden Erfindung ist es, ein Verfahren der eingangs genannten Art sowie ein Hartflächenabsauggerät zur Durchführung des Verfahrens derart weiterzubilden, dass der Energieverbrauch des tragbaren Hartflächenabsauggeräts verringert werden kann.
- Bei einem Verfahren der gattungsgemäßen Art wird die er Erfindung zugrundeliegende Aufgabe dadurch gelöst, dass eine aus dem Anpressen der mindestens einen Abstreiflippe gegen die Hartfläche resultierende mechanische Beanspruchung des Hartflächenabsauggeräts erfasst wird und bei Vorliegen dieser mechanischen Beanspruchung das Saugaggregat selbsttätig eingeschaltet wird.
- Die Erfassung der mechanischen Beanspruchung des Hartflächenabsauggeräts beim Anpressen der mindestens einen Abstreiflippe gegen die Hartfläche ermöglicht es, das Saugaggregat erst dann in Gang zu setzen, wenn tatsächlich auch ein Wasserfilm von der Hartfläche abgesaugt werden soll. Dadurch kann die Einschaltdauer des Saugaggregats begrenzt und dadurch der Energieverbrauch des Hartflächenabsauggeräts reduziert werden.
- Das Anpressen der mindestens einen flexiblen Abstreiflippe gegen die Hartfläche führt zu einer Reaktionskraft, mit der das Hartflächenabsauggerät, insbesondere die Saugdüse und/oder die Abscheideeinrichtung, beaufschlagt werden. Es kann beispielsweise vorgesehen sein, dass mit Hilfe von mindestens einem Kraftaufnehmer die einwirkende Reaktionskraft erfasst und daraufhin das Saugaggregat in Gang gesetzt wird.
- Von besonderem Vorteil ist es, wenn bei Wegfall der erfassten mechanischen Beanspruchung des Hartflächenabsauggeräts das Saugaggregat selbsttätig ausgeschaltet wird. Die mechanische Beanspruchung des Hartflächenabsauggeräts entfällt bei einer derartigen Ausgestaltung, sobald die mindestens eine Abstreiflippe von der Hartfläche entfernt wird. In diesem Fall ist es nicht länger erforderlich, eine Saugströmung von der Saugdüse zum Saugaggregat aufrechtzuerhalten, vielmehr kann das Saugaggregat ausgeschaltet werden.
- Der Wegfall der mechanischen Beanspruchung des Hartflächenabsauggeräts kann auf einfache Weise durch einen Kraftaufnehmer erfasst werden, der beim Entfernen der mindestens einen Abstreiflippe von der Hartfläche den Wegfall der Reaktionskraft signalisiert. Aufgrund dieses Signals kann dann die Steuereinrichtung das Saugaggregat ausschalten.
- Von Vorteil ist es, wenn das Hartflächenabsauggerät in einem ersten Verfahrensschritt in Betriebsbereitschaft versetzt wird und dann bei Vorliegen einer aus dem Anpressen der mindestens einen Abstreiflippe gegen die Hartfläche resultierenden mechanischen Beanspruchung des Hartflächenabsauggeräts das Saugaggregat selbsttätig eingeschaltet wird. Bei einer derartigen Ausführungsform des erfindungsgemäßen Verfahrens wird das Hartflächenabsauggerät nur dann selbsttätig in Gang gesetzt, wenn das Hartflächenabsauggerät zuvor in Betriebsbereitschaft versetzt wurde. Liegt noch keine Betriebsbereitschaft vor, so führt ein Anpressen der mindestens einen Abstreiflippe gegen die Hartfläche noch nicht zum Einschalten des Saugaggregates. Wird die Betriebsbereitschaft beendet, noch bevor die mindestens eine Abstreiflippe von der Hartfläche entfernt wird, so wird dennoch das Saugaggregat ausgeschaltet.
- Günstigerweise wird das Hartflächenabsauggerät manuell in Betriebsbereitschaft versetzt. Hierzu kann beispielsweise ein Hauptschalter zum Einsatz kommen, der vom Benutzer betätigt werden kann. Das selbsttätige Ein- und Ausschalten des Saugaggregates erfolgt dann nur nach vorheriger manueller Betätigung des Hauptschalters.
- Statt eines elektromechanischen Hauptschalters kann das Hartflächenabsauggerät auch mittels eines Berührungssensors, beispielsweise mit Hilfe eins kapazitiven Sensors, in Betriebsbereitschaft versetzt werden, wobei mit Hilfe des Berührungssensors das manuelle Ergreifen des Hartflächenabsauggeräts durch den Benutzer erfasst wird.
- Üblicherweise umfasst das Hartflächenabsauggerät einen Handgriff, an dem der Benutzer das tragbare Hartflächenabsauggerät ergreift. Der Berührungssensor ist vorzugsweise am Handgriff oder diesem unmittelbar benachbart angeordnet, so dass von ihm das Ergreifen des Handgriffs durch den Benutzer erkannt und daraufhin das Hartflächenabsauggerät in Betriebsbereitschaft versetzt werden kann. Legt der Benutzer das Hartflächenabsauggerät zur Seite, so stellt der Berührungssensor ein Signal bereit, das zur Folge hat, dass die Betriebsbereitschaft des Hartflächenabsauggeräts selbsttätig beendet wird, wobei dann das Saugaggregat ausgeschaltet wird.
- Es kann auch vorgesehen sein, dass das Hartflächenabsauggerät nach Ablauf eines vorgegebenen oder vorgebbaren Zeitintervalls selbsttätig ausgeschaltet wird. Der eigentliche Reinigungsvorgang, bei dem die mindestens eine Abstreiflippe gegen die Hartfläche gepresst wird, dauert selbst bei großen Hartflächen, beispielsweise bei der Reinigung großer Schaufensterscheiben, in aller Regel weniger als eine Minute, da der Benutzer anschließend seine Lage relativ zur Hartfläche ändert und hierbei die mindestens eine Abstreiflippe von der Hartfläche entfernt. Es kann deshalb vorgesehen sein, dass das vorgegebene Zeitintervall weniger als eine Minute dauert, vorzugsweise nur etwa eine halbe Minute. Ist das Zeitintervall abgelaufen, so wird das Saugaggregat selbsttätig abgeschaltet. Es kann dann erneut wieder eingeschaltet werden, sobald es erneut gegen die Hartfläche gepresst wird und dadurch erneut eine mechanische Beanspruchung des Hartflächenabsauggeräts auftritt.
- Bei einer besonders vorteilhaften Ausführungsform des erfindungsgemäßen Verfahrens wird mit Hilfe von mindestens einem Bewegungssensor des Hartflächenabsauggeräts dessen Bewegung im Raum erfasst und nach Ablauf eines vorgegebenen oder vorgebbaren Zeitintervalls, in dem das Hartflächenabsauggerät nicht bewegt wurde, wird das Saugaggregat selbsttätig ausgeschaltet. In eine derartige Ausgestaltung des erfindungsgemäßen Verfahrens fließt der Gedanke mit ein, dass der Benutzer nach Beendigung eines Reinigungsvorgangs das Hartflächenabsauggerät in aller Regel auf einer Stellfläche abstellt, so dass es anschließend keine Bewegung im Raum mehr durchführt. Liegt diese Situation für ein vorgegebenes oder vorgebbares Zeitintervall vor, so kann das Saugaggregat anschließend selbsttätig ausgeschaltet werden.
- Die mechanische Beanspruchung des Hartflächenabsauggeräts beim Anpressen der mindestens einen Abstreiflippe gegen die Hartfläche kann zu einer Relativbewegung zwischen zwei Bauteilen des Hartflächenabsauggeräts, insbesondere zu einer Relativbewegung zwischen zwei Gehäuseteilen des Hartflächenabsauggeräts führen. Bei einer vorteilhaften Ausführungsform des Verfahrens wird die aus dem Anpressen der mindestens einen Abstreiflippe gegen die Hartfläche resultierende Relativbewegung zwischen den beiden Bauteilen erfasst und daraufhin das Saugaggregat selbsttätig eingeschaltet. Das Hartflächenabsauggerät kann beispielsweise ein erstes und ein zweites Gehäuseteil aufweisen, die lösbar miteinander verbindbar sind, wobei sie im verbundenen Zustand geringfügig, das heißt im Millimeter- oder Submillimeterbereich, relativ zueinander bewegbar sind. Wird die mindestens eine Abstreiflippe zu Beginn eines Reinigungsvorgangs gegen eine Hartfläche gepresst, so führen die beiden Gehäuseteile eine geringfügige Relativbewegung zueinander aus. Diese Relativbewegung kann mittels Sensoren erfasst werden und als Startsignal für das Saugaggregat dienen.
- Von besonderem Vorteil ist es, wenn die beiden relativ zueinander beweglichen Bauteile bei fehlender mechanischer Beanspruchung des Hartflächenabsauggeräts selbsttätig, beispielsweise aufgrund der Wirkung einer federelastischen Rückstellkraft, eine vorgegebene Position relativ zueinander einnehmen, denn dadurch führen sie eine erneute Relativbewegung aus, sobald die mindestens eine Abstreiflippe von der Hartfläche entfernt wird, und diese erneute Relativbewegung kann als Stoppsignal für das Saugaggregat dienen, so dass das Saugaggregat ausgeschaltet wird, sobald die beiden relativ zueinander beweglichen Bauteile wieder ihre Ausgangsstellung einnehmen, die sie vor dem Beginn des Reinigungsvorgangs eingenommen hatten.
- Die Relativbewegung zwischen den beiden Bauteilen wird günstigerweise elektromechanisch, piezoelektrisch, optisch, induktiv, und/oder kapazitiv erfasst. Eine elektromechanische Erfassung, beispielsweise mittels eines Mikroschalters oder eines Potentiometers, insbesondere eines Folienpotentiometers, ist von Vorteil.
- Alternativ oder ergänzend zum Erfassen einer Relativbewegung zwischen zwei Bauteilen des Hartflächenabsauggeräts wird bei einer vorteilhaften Ausführungsform des erfindungsgemäßen Verfahrens eine aus dem Anpressen der mindestens einen Abstreiflippe resultierende elastische Verformung eines Bauteils des Hartflächenabsauggeräts erfasst und daraufhin das Saugaggregat selbsttätig eingeschaltet.
- Von ganz besonderem Vorteil ist es, wenn die Verformung mindestens einer Abstreiflippe erfasst und als Startsignal für das Saugaggregat verwendet wird. Die mindestens eine Abstreiflippe ist flexibel ausgestaltet und unterliegt beim Anpressen gegen die Hartfläche einer elastischen Verformung. Diese Verformung kann erfasst werden, um das Saugaggregat in Gang zu setzen.
- Wird nach Beendigung eines Reinigungsvorgangs die mindestens eine Abstreiflippe von der Hartfläche entfernt, so entfällt die auf das Hartflächenabsauggerät einwirkende Reaktionskraft und das Bauteil, das sich beim Anpressen der mindestens einen Abstreiflippe gegen die Hartfläche elastisch verformt hat, nimmt wieder seine ursprüngliche Gestalt ein. Der Wegfall der Verformung kann als Stoppsignal für das Saugaggregat dienen, so dass dieses ausgeschaltet wird, sobald die erfasste Verformung des Bauteils entfällt.
- Die elastische Verformung des mindestens einen Bauteils des Hartflächenabsauggeräts wird günstigerweise elektromechanisch, piezoelektrisch, optisch, induktiv und/oder kapazitiv erfasst. Insbesondere eine elektro-mechanische Erfassung, beispielsweise mit Hilfe eines Dehnungsmessstreifens, ist von Vorteil. Derartige Dehnungsmessstreifen werden in sehr großer Stückzahl kostengünstig hergestellt und sind dem Fachmann an sich bekannt. Mit ihrer Hilfe kann auf konstruktiv einfache Weise eine mechanische Beanspruchung erfasst werden, der das Hartflächenabsauggerät beim Anpressen der mindestens einen Abstreiflippe gegen die Hartfläche unterliegt.
- Wie eingangs erwähnt, betrifft die Erfindung auch ein tragbares Hartflächenabsauggerät zur Durchführung des Verfahrens. Das tragbare Hartflächenabsauggerät ist zum Absaugen eines Flüssigkeits-Luftgemisches von einer Hartfläche, insbesondere von einer Fensterscheibe, geeignet und umfasst eine Saugdüse mit mindestens einer an die Hartfläche anpressbaren flexiblen Abstreiflippe, ein Saugaggregat sowie eine im Strömungsweg zwischen der Saugdüse und dem Saugaggregat angeordnete Abscheideeinrichtung, die vorzugsweise über eine Flüssigkeitsauslassöffnung mit einem Schmutzflüssigkeitstank verbunden ist. Außerdem umfasst das Hartflächenabsauggerät eine Steuereinrichtung zum Ein- und Ausschalten des Saugaggregates und mindestens eine wiederaufladbare Batterie zur Energieversorgung des Saugaggregates.
- Um ein derartiges tragbares Hartflächenabsauggerät derart weiterzubilden, dass es einen geringeren Energieverbrauch aufweist, wird erfindungsgemäß vorgeschlagen, dass die Steuereinrichtung eine Beanspruchungserfassungsvorrichtung aufweist, wobei mittels der Beanspruchungserfassungsvorrichtung eine aus dem Anpressen der mindestens einen Abstreiflippe gegen die Hartfläche resultierende mechanische Beanspruchung des Hartflächenabsauggeräts erfassbar und das Saugaggregat mittels der Beanspruchungserfassungsvorrichtung selbsttätig einschaltbar ist.
- Wie bereits voranstehend erläutert, kann durch die Bereitstellung einer das Saugaggregat selbsttätig einschaltenden Beanspruchungserfassungsvorrichtung der Energieverbrauch des Hartflächenabsauggeräts vermindert werden, denn die Beanspruchungserfassungsvorrichtung erlaubt es, das Saugaggregat erst dann einzuschalten, wenn tatsächlich eine Saugströmung von der Saugdüse zum Saugaggregat vorliegen soll. Dies ist dann der Fall, wenn die mindestens eine Abstreiflippe gegen die Hartfläche gepresst wird. Solange die mindestens eine Abstreiflippe noch einen Abstand zur Hartfläche einnimmt, ist eine Saugströmung nicht notwendig und das Saugaggregat wird daher auch noch nicht selbsttätig eingeschaltet.
- Günstig ist es, wenn das Saugaggregat bei Wegfall der erfassten mechanischen Beanspruchung mittels der Beanspruchungserfassungsvorrichtung selbsttätig ausschaltbar ist. Bei einer derartigen Ausgestaltung des erfindungsgemäßen Hartflächenabsauggeräts wird von der Beanspruchungserfassungsvorrichtung der Wegfall der mechanischen Beanspruchung des Hartflächenabsauggeräts erfasst. Die mechanische Beanspruchung entfällt, sobald die mindestens eine Abstreiflippe von der Hartfläche entfernt wird. Dies kann, wie bereits erläutert, als Stoppsignal für das Saugaggregat dienen. Das Saugaggregat ist somit nur in Betrieb, solange die mindestens eine Abstreiflippe gegen die Hartfläche gepresst wird.
- Von Vorteil ist es, wenn das Hartflächenabsauggerät vom Benutzer in Betriebsbereitschaft versetzbar und das Saugaggregat nur bei Vorliegen der Betriebsbereitschaft mittels der Beanspruchungserfassungsvorrichtung selbsttätig ein- und/ausschaltbar ist. Bei einer derartigen Ausgestaltung kann das Hartflächenabsauggerät vom Benutzer zunächst in Betriebsbereitschaft versetzt werden. Liegt die Betriebsbereitschaft vor, so kann anschließend mittels der Beanspruchungserfassungsvorrichtung das Saugaggregat selbsttätig eingeschaltet und vorzugsweise auch selbsttätig wieder ausgeschaltet werden. Wurde das Hartflächenabsauggerät noch nicht in Betriebsbereitschaft versetzt, so ist ein selbsttätiges Ein- und/oder Ausschalten des Saugaggregates mittels der Beanspruchungserfassungsvorrichtung nicht möglich. Wird die Betriebsbereitschaft vom Benutzer beendet, so wird das Saugaggregat unabhängig von einem Ausgangssignal der Beanspruchungserfassungsvorrichtung in jedem Falle ausgeschaltet.
- Günstig ist es, wenn das Hartflächenabsauggerät eine Schalteinrichtung aufweist, insbesondere einen Hauptschalter, die vom Benutzer manuell betätigbar ist, wobei durch die Betätigung der Schalteinrichtung das Hartflächenabsauggerät in Betriebsbereitschaft versetzbar ist.
- Alternativ oder ergänzend kann vorgesehen sein, dass das Hartflächenabsauggerät einen Berührungssensor aufweist, insbesondere einen kapazitiven Berührungssensor, wobei vom Berührungssensor das Ergreifen des Hartflächenabsauggeräts durch den Benutzer erfassbar und dadurch das Hartflächenabsauggerät in Betriebsbereitschaft versetzbar ist.
- Günstigerweise ist der Berührungssensor an einem Handgriff des Hartflächenabsauggeräts oder dem Handgriff unmittelbar benachbart angeordnet. Der Handgriff ist günstigerweise vom Benutzer umgreifbar.
- Bei einer vorteilhaften Ausführungsform des erfindungsgemäßen Hartflächenabsauggeräts umfasst dieses einen Zeitgeber und das Saugaggregat ist nach Ablauf eines vorgegebenen oder vorgebbaren Zeitintervalls selbsttätig ausschaltbar.
- Bei einer bevorzugten Ausführungsform weist das Hartflächenabsauggerät zusätzlich zu einem Zeitgeber mindestens einen Bewegungssensor auf, wobei mittels des mindestens einen Bewegungssensors eine Bewegung des Hartflächenabsauggeräts im Raum erfassbar und das Saugaggregat nach Ablauf eines vorgegebenen oder vorgebbaren Zeitintervalls, in dem das Hartflächenabsauggerät nicht bewegt wurde, selbsttätig ausschaltbar ist. Wie voranstehend bereits erläutert, kann durch den Einsatz eines Zeitgebers und eines oder mehrerer Bewegungssensoren sichergestellt werden, dass das Saugaggregat zuverlässig ausgeschaltet wird, sobald das Hartflächenabsauggerät länger als ein vorgegebenes oder vorgebbares Zeitintervall nicht bewegt wurde. Letzteres ist beispielsweise der Fall, wenn der Benutzer das Hartflächenabsauggerät auf eine Stellfläche abstellt.
- Bei einer vorteilhaften Ausführungsform weist das Hartflächenabsauggerät ein erstes und ein zweites Bauteil auf, die durch Anpressen der mindestens einen Abstreiflippe gegen die Hartfläche relativ zueinander bewegbar sind, und die Beanspruchungserfassungsvorrichtung weist mindestens ein Erfassungsglied auf, wobei mittels des Erfassungsglieds die Relativbewegung der beiden Bauteile erfassbar ist. Wird die mindestens eine Abstreiflippe gegen die Hartfläche gepresst, so unterliegt ein erstes Bauteil bezogen auf ein zweites Bauteil einer Relativbewegung, die bei einer derartigen Ausgestaltung des Hartflächenabsauggeräts von mindestens einem Erfassungsglied erfasst wird. Ein entsprechendes Ausgangssignal des Erfassungsglieds kann dann als Startsignal für das Saugaggregat dienen, so dass dieses eingeschaltet wird, sobald die Relativbewegung erfasst wurde.
- Die Relativbewegung der beiden Bauteile ist mittels des mindestens einen Erfassungsglieds vorteilhafterweise elektromechanisch, piezoelektrisch, induktiv und/oder kapazitiv erfassbar. Insbesondere eine elektromechanische Erfassung der Relativbewegung ist von Vorteil.
- Das mindestens eine Erfassungsglied kann beispielsweise als Mikroschalter und/oder als Potentiometer, insbesondere in Form eines Folienpotentiometers, ausgestaltet sein.
- Das mindestens eine Erfassungsglied ist günstigerweise zwischen den beiden relativ zueinander bewegbaren Bauteilen angeordnet, so dass zumindest eines der beiden Bauteile unmittelbar auf das Erfassungsglied einwirken kann, beispielsweise auf den Schaltstößel eines Mikroschalters.
- Die beiden Bauteile sind bei einer vorteilhaften Ausführungsform als Gehäuseteile des Hartflächenabsauggeräts ausgestaltet.
- Es kann beispielsweise vorgesehen sein, dass ein erstes Gehäuseteil die Abscheideeinrichtung und ein zweites Gehäuseteil das Saugaggregat aufnimmt, wobei das erste Gehäuseteil relativ zum zweiten Gehäuseteil bewegbar ist.
- Die beiden Gehäuseteile sind günstigerweise lösbar miteinander verbindbar, wobei sie im verbundenen Zustand eine Relativbewegung im Millimeter- oder Submillimeterbereich durchführen können.
- Alternativ oder ergänzend zur Erfassung einer Relativbewegung zwischen zwei Bauteilen des Hartflächenabsauggeräts kann auch vorgesehen sein, dass das Hartflächenabsauggerät zumindest ein durch Anpressen der mindestens einen Abstreiflippe gegen die Hartfläche elastisch verformbares Bauteil aufweist und dass die Beanspruchungserfassungsvorrichtung mindestens einen Verformungssensor aufweist, wobei mittels des Verformungssensors die Verformung des verformbaren Bauteils erfassbar ist. Die Verformung kann hierbei sehr geringfügig sein, beispielsweise kann sich das verformbare Bauteil beim Anpressen der mindestens einen Abstreiflippe gegen die Hartfläche um Bruchteile eines Millimeters verformen, wobei diese geringfügige Verformung vom Verformungssensor berührungsbehaftet oder berührungslos erfassbar ist.
- Besonders günstig ist es, wenn die Verformung des verformbaren Bauteils mittels des mindestens einen Verformungssensors elektromechanisch, piezoelektrisch, induktiv und/oder kapazitiv erfassbar ist.
- Bei einer vorteilhaften Ausführungsform ist der mindestens eine Verformungssensor als Dehnungsmessstreifen ausgestaltet. Wie bereits erwähnt, sind derartige Dehnungsmessstreifen kostengünstig verfügbar.
- Bei einer besonders bevorzugten Ausführungsform ist zumindest ein Verformungssensor in eine Abstreiflippe des Hartflächenabsauggeräts integriert. Wird die Abstreiflippe gegen die Hartfläche gepresst, so unterliegt sie einer elastischen Verformung, die von dem in die Abstreiflippe integrierten Verformungssensor unmittelbar erfasst werden kann. Die Abstreiflippe kann beispielsweise aus einem gummielastischen Material hergestellt sein, wobei der Verformungssensor vom gummielastischen Material vollständig umgeben ist.
- Zumindest ein Verformungssensor ist bei einer vorteilhaften Ausführungsform an einem Gehäuseteil des Hartflächenabsauggeräts festgelegt, wobei das Gehäuseteil beim Anpressen der mindestens einen Abstreiflippe gegen die Hartfläche einer elastischen Verformung unterliegt. Die gegebenenfalls nur im Bereich von Bruchteilen eines Millimeters erfolgende elastische Verformung des Gehäuseteils kann von dem an ihm festgelegten Verformungssensor, beispielsweise von einem Dehnungsmessstreifen, erfasst werden. Das Ausgangssignal des Verformungssensors kann dann als Startsignal für den Betrieb des Saugaggregates dienen.
- Die nachfolgende Beschreibung vorteilhafter Ausführungsformen der Erfindung dient im Zusammenhang mit der Zeichnung der näheren Erläuterung. Es zeigen:
- Figur 1:
- eine perspektivische Darstellung einer ersten vorteilhaften Ausführungsform eines erfindungsgemäßen Hartflächenabsauggeräts;
- Figur 2:
- eine Schnittansicht des Hartflächenabsauggeräts aus
Figur 1 ; - Figur 3:
- ein Blockschaltbild einer Steuereinrichtung des Hartflächenabsauggeräts aus
Figur 1 ; - Figur 4:
- eine Schnittansicht einer zweiten vorteilhaften Ausführungsform eines erfindungsgemäßen Hartflächenabsauggeräts, und
- Figur 5:
- ein Blockschaltbild einer Steuereinrichtung des Hartflächenabsauggeräts aus
Figur 4 . - In den
Figuren 1 bis 3 ist schematisch eine erste vorteilhafte Ausführungsform eines erfindungsgemäßen tragbaren Hartflächenabsauggeräts dargestellt, das insgesamt mit dem Bezugszeichen 10 belegt ist. Mit Hilfe des Hartflächenabsauggeräts 10 kann ein Flüssigkeitsfilm von einer Hartfläche, insbesondere von einer Fensterscheibe, abgesaugt werden. Es kann hierzu vom Benutzer mit einer Hand an einem Handgriff 12 gehalten werden und umfasst eine Abstreiflippe 14 und eine Stützlippe 16, die an die zu reinigende Hartfläche gepresst und an dieser entlanggeführt werden können. - Die Abstreiflippe 14 und die Stützlippe 16 bilden das freie Ende einer Saugdüse 18. An die Abstreiflippe 14 und die Stützlippe 16 schließt sich ein Saugkanal 20 an, der in eine Abscheidekammer 22 eintaucht. In der Abscheidekammer 22 ist eine Abscheideeinrichtung 24 mit einem Abscheideelement in Form einer Prallwand 26 angeordnet. Auf der dem Saugkanal 20 abgewandten Seite der Prallwand 26 ragt in die Abscheidekammer 22 das freie Ende einer Unterdruckleitung 28, über die die Abscheidekammer 22 mit einem Saugaggregat 30 in Strömungsverbindung steht. Das Saugaggregat 30 weist eine Saugturbine 32 auf, die von einem Motor 34 in Drehung versetzt wird. Dadurch kann ausgehend von der Abstreiflippe 14 und der Stützlippe 16 eine Saugströmung erzielt werden, die sich durch den Saugkanal 20, die Abscheidekammer 22 und die Unterdruckleitung 28 hindurch bis zum Saugaggregat 30 erstreckt. Unterhalb des Motors 34 ist der größte Teil einer in
Figur 3 dargestellten Steuereinrichtung 36 angeordnet, die zusätzlich zu den unterhalb des Motors 34 angeordneten elektrischen Bauteilen eine nachfolgend näher erläuterte Beanspruchungserfassungsvorrichtung 38 mit einem Erfassungsglied in Form eines Mikroschalters 40 aufweist. - Über eine Flüssigkeitsauslassöffnung 42 steht die Abscheidekammer 22 mit einem Schmutzflüssigkeitstank 44 in Verbindung. Der Schmutzflüssigkeitstank 44 kann mit Hilfe eines Einlassrohrs 46 mit Flüssigkeit befüllt werden, die in der Abscheidekammer 22 aus dem Flüssigkeits-Luftgemisch abgeschieden wird, das unter der Wirkung des Saugaggregats 30 über die Saugdüse 18 in die Abscheidekammer 22 eingesaugt wird. Die abgeschiedene Flüssigkeit kann über das Einlassrohr 46 in den Schmutzflüssigkeitstank 44 gelangen und die eingesaugte Luft kann über die Unterdruckleitung 28, das Saugaggregat 30 und diesem in Strömungsrichtung nachgeordnete Luftauslassöffnungen 47 abgegeben werden.
- Über ein Luftauslassrohr 48, das die Flüssigkeitsauslassöffnung 42 durchgreift, kann im Schmutzflüssigkeitstank 44 befindliche Luft an die Abscheidekammer 22 abgegeben werden, wenn sich der Füllstand des Flüssigkeitstanks 44 während der Benutzung des Hartflächenabsauggeräts 10 erhöht.
- Zwischen dem Schmutzflüssigkeitstank 44 und dem Handgriff 12 weist das Hartflächenabsauggerät 10 eine Grifföffnung 50 auf, die das Umgreifen des Handgriffs 12 erleichtert. An der der Grifföffnung 50 zugewandten Seite des Handgriffs 12 ist ein elektromechanischer Taster 52 angeordnet, der vom Benutzer beim Ergreifen des Handgriffs 12 betätigt werden kann. Mit Hilfe des Tasters 52 kann das Hartflächenabsauggerät 10 in Betriebsbereitschaft versetzt werden. Dies wird nachfolgend noch näher erläutert. Alternativ kann am Handgriff 12 ein in
Figur 2 gestrichelt dargestellter Berührungssensor 54 angeordnet sein, mit dessen Hilfe das Ergreifen des Handgriffs 12 erfasst werden kann. Über in der Zeichnung zur Erzielung einer besseren Übersicht nicht dargestellte elektrische Verbindungsleitungen ist der Taster 52 und ist alternativ der Berührungssensor 54 mit den unterhalb des Motors 34 angeordneten elektrischen Bauteilen der Steuereinrichtung 36 verbunden. - Weiter umfasst das Hartflächenabsauggerät 10 ein erstes Bauteil in Form eines Gehäuseunterteils 56 und ein zweites Bauteil in Form eines Gehäuseoberteils 58. Das Gehäuseunterteil 56 nimmt das Saugaggregat 30 auf und bildet den Handgriff 12, und das Gehäuseoberteil 58 nimmt die Abscheidekammer 22 mit der Abscheideeinrichtung 24 auf. Auf das Gehäuseoberteil 58 ist die Saugdüse 18 aufgesteckt, die über eine in
Figur 2 schematisch dargestellte obere Rastverbindung 60 mit dem Gehäuseoberteil 58 lösbar verbunden ist. Das Gehäuseoberteil 58 ist über eine inFigur 1 schematisch dargestellte untere Rastverbindung 62 mit dem Gehäuseunterteil 56 lösbar verbunden. Das Gehäuseoberteil 58 sitzt mit einer bogenförmig gekrümmten Bodenwand 64 auf einer bogenförmig gekrümmten Deckenwand 66 des Gehäuseunterteils 56 auf. Ist das Gehäuseoberteil 58 mit dem Gehäuseunterteil 56 verbunden, so kann es relativ zum Gehäuseunterteil 56 eine geringfügige Schwenkbewegung um eine senkrecht zur Zeichenebene derFigur 2 ausgerichtete Schwenkachse 58 ausführen, wobei die Bodenwand 64 des Gehäuseoberteils 58 an der Deckenwand 66 des Gehäuseunterteils 56 entlanggleitet. - Im Fügebereich 65 zwischen dem Gehäuseoberteil 58 und dem Gehäuseunterteil 56 ist auf der dem Taster 52 abgewandten Seite des Handgriffs 12 ein Mikroschalter 40 angeordnet. Wird die Abstreiflippe 14 zum Reinigen einer Hartfläche gegen die Hartfläche gedrückt, so vollzieht das Gehäuseoberteil 58 relativ zum Gehäuseunterteil 56 eine geringfügige Relativbewegung in Form einer Schwenkbewegung um die Schwenkachse 68. Diese Relativbewegung wird vom Mikroschalter 40 erfasst, der aufgrund dieser Relativbewegung seine Schaltstellung ändert. Diese Änderung der Schaltstellung hat zur Folge, dass das Saugaggregat 30 eingeschaltet wird, nachdem der Benutzer zuvor mittels des Tasters 52 das Hartflächenabsauggerät 10 in Betriebsbereitschaft gesetzt hat. Das Aktivieren des Saugaggregats 30 erfolgt somit bei dem in den
Figuren 1 bis 3 dargestellten Ausführungsbeispiel durch Erfassen der beim Anpressen der Abstreiflippe 14 gegen eine Hartfläche erfolgenden Beanspruchung des Hartflächenabsauggeräts 10, die eine Relativbewegung des Gehäuseoberteils 58 relativ zum Gehäuseunterteil 56 zur Folge hat. Dies wird insbesondere aus dem inFigur 3 dargestellten Blockschaltbild deutlich. -
Figur 3 zeigt den Motor 34 des Saugaggregates 30, der über eine Versorgungsleitung 70 mit einer seitlich neben dem Motor 34 angeordneten wiederaufladbaren Batterie 72 verbunden ist. In die Versorgungsleitung 70 ist eine steuerbare Schalteinheit 74 geschaltet, deren Steuereingang 76 mit einem Datenverarbeitungsglied 78 verbunden ist. Das Datenverarbeitungsglied 78 umfasst einen Zeitgeber 80 und ist eingangsseitig mit dem Mikroschalter 40 sowie mit einem Beschleunigungssensor 82 verbunden, der unter Zwischenlage eines Schwingungsdämpfungsglieds 84 auf einer unterhalb des Motors 34 im Gehäuseunterteil 56 angeordneten Leiterplatte 86 positioniert ist. - Mittels der in
Figur 3 schematisch dargestellten Steuereinrichtung 36 kann das Saugaggregat 30 selbsttätig ein- und ausgeschaltet werden, sobald der Benutzer durch Betätigen des Tasters 52 die Betriebsbereitschaft des Hartflächenabsauggeräts 10 hergestellt hat. Alternativ kann bei Einsatz des Berührungssensors 54 die Betriebsbereitschaft des Hartflächenabsauggeräts 10 dadurch hergestellt werden, dass der Benutzer den Handgriff 12 ergreift, denn dies kann vom Berührungssensor 54 erfasst werden, der alternativ zum Taster 52 zum Einsatz kommt und inFigur 3 gestrichelt dargestellt ist. - Zwischen der Bodenwand 64 und der Deckenwand 66 ist ein Federelement 69 angeordnet, das auf das Gehäuseoberteil 58 eine federelastische Rückstellkraft ausübt, unter deren Wirkung das Gehäuseoberteil 58 eine vordere Schwenkstellung einnimmt, in der es den Mikroschalter 40 freigibt. Wird die Abstreiflippe 14 bei einem Reinigungsvorgang vom Benutzer gegen eine zu reinigende Hartfläche gepresst, vollzieht das Gehäuseoberteil 58 eine geringfügige Schwenkbewegung um die Schwenkachse 68 entgegen der Wirkung des Federelements 69, wobei der Schaltstößel des Mikroschalters 40 betätigt wird. Ein entsprechendes Ausgangssignal des Mikroschalters 40 wird über in der Zeichnung zur Erzielung einer besseren Übersicht nicht dargestellte Signalleitungen an das Datenverarbeitungsglied 78 geleitet, das daraufhin der steuerbaren Schalteinheit 74 ein Steuersignal bereitstellt, so dass dieses die elektrische Verbindung zwischen der Batterie 72 und dem Motor 34 freigibt. Somit wird das Saugaggregat 30 mittels der Steuereinrichtung 36 selbsttätig eingeschaltet, sobald das Hartflächenabsauggerät 10 durch das Anpressen der Abstreiflippe 14 gegen die Hartfläche eine mechanische Beanspruchung erfährt, die eine Relativbewegung des Gehäuseoberteils 58 bezogen auf das Gehäuseunterteil 56 zur Folge hat. Voraussetzung für das selbsttätige Einschalten des Saugaggregates 30 ist allerdings, dass zuvor die Betriebsbereitschaft des Hartflächenabsauggeräts 10 hergestellt wurde.
- Der Betrieb des Saugaggregats 30 wird beendet, sobald der Benutzer die Abstreiflippe 14 von der Hartfläche entfernt, denn dann entfällt die mechanische Beanspruchung des Hartflächenabsauggeräts 10 und das Gehäuseoberteil 58 nimmt unter der Wirkung des Federelements 69 seine anfängliche Position ein, in der es den Schaltstößel des Mikroschalters 40 freigibt. Ein entsprechendes Ausgangssignal des Mikroschalters 40 wird dann vom Datenverarbeitungsglied 78 erfasst, das daraufhin mittels der steuerbaren Schalteinheit 74 die elektrische Verbindung zwischen der Batterie 72 und dem Motor 34 unterbricht.
- Beendet der Benutzer die Betriebsbereitschaft des Hartflächenabsauggeräts 10, indem er den Taster 52 freigibt oder indem er, falls der Berührungssensor 54 zum Einsatz kommt, den Handgriff 12 freigibt, so wird dies vom Datenverarbeitungsglied 78 ebenfalls erkannt, das daraufhin die steuerbare Schalteinheit 75 derart ansteuert, dass die elektrische Verbindung zwischen der Batterie 72 und dem Motor 34 unterbrochen wird.
- Darüber hinaus wird der Betrieb des Saugaggregates 30 selbsttätig beendet, falls das Hartflächenabsauggerät 10 länger als ein vom Zeitgeber 80 vorgegebenes Zeitintervall im Raum nicht bewegt wird. Die Bewegung des Hartflächenabsauggeräts 10 im Raum wird vom Beschleunigungssensor 82 erfasst. Wird das Hartflächenabsauggerät 10 nicht bewegt, so unterliegt es lediglich der Erdbeschleunigung, ohne dass eine Beschleunigungsänderung erfolgt. Die fehlende Beschleunigungsänderung wird vom Datenverarbeitungsglied 78 erfasst und bei Ablauf des vorgegebenen Zeitintervalls wird vom Datenverarbeitungsglied 78 ein Steuersignal ausgegeben, unter dessen Wirkung die steuerbare Schalteinheit 74 ebenfalls die elektrische Verbindung zwischen der Batterie 72 und dem Motor 34 unterbricht.
- Der Betrieb des Saugaggregates 30 erfolgt somit nur dann, wenn zum einen die Betriebsbereitschaft des Hartflächenabsauggeräts 10 hergestellt wurde und zum anderen die Abstreiflippe 14 gegen eine Hartfläche gepresst wird, so dass das Hartflächenabsauggerät 10 einer mechanischen Beanspruchung unterliegt. Fällt die mechanische Beanspruchung weg, indem der Benutzer die Abstreiflippe 14 von der Hartfläche entfernt, so wird das Saugaggregat 30 selbsttätig ausgeschaltet.
- In den
Figuren 4 und5 ist eine zweite vorteilhafte Ausführungsform eines erfindungsgemäßen Hartflächenabsauggeräts dargestellt, das insgesamt mit dem Bezugszeichen 100 belegt ist. Das Hartflächenabsauggerät 100 ist weitgehend identisch ausgestaltet wie das voranstehend unter Bezugnahme auf dieFiguren 1 bis 3 beschriebene Hartflächenabsauggerät 10. Für identische Bauteile werden daher in denFiguren 4 und5 dieselben Bezugszeichen verwendet wie in denFiguren 1 bis 3 und bezüglich dieser Bauteile wird zur Vermeidung von Wiederholungen auf die voranstehenden Erläuterungen Bezug genommen. - Vom Hartflächenabsauggerät 10 unterscheidet sich das Hartflächenabsauggerät 100 dadurch, dass statt des Mikroschalters 40, mit dem eine Bewegung des Gehäuseoberteils 58 relativ zum Gehäuseunterteil 56 erfasst werden kann, ein Verformungssensor in Form eines Dehnungsmessstreifens 102 zum Einsatz kommt, der in die flexible Abstreiflippe 14 integriert ist und deren elastische Verformung beim Anpressen gegen die Hartfläche erfasst. Der Dehnungsmessstreifen 102 steht über eine in der Zeichnung zur Erzielung einer besseren Übersicht nicht dargestellte Messleitung mit dem Datenverarbeitungsglied 78 in elektrischer Verbindung und stellt bei einer Verformung der Abstreiflippe 14 ein Messsignal bereit, das vom Datenverarbeitungsglied 78 erfasst wird. Bei einer Verformung der Abstreiflippe 14 gibt das Datenverarbeitungsglied 78 über die steuerbare Schalteinheit 74 die elektrische Verbindung zwischen der Batterie 72 und dem Motor 34 frei, so dass das Saugaggregat 30 in Gang gesetzt wird. Entfernt der Benutzer die Abstreiflippe 14 von der Hartfläche, so nimmt die flexible Abstreiflippe 14 aufgrund ihrer Elastizität wieder ihre ursprüngliche Gestalt sein, so dass die Verformung entfällt. Dies wird vom Dehnungsmessstreifen 102 erkannt, der ein entsprechendes Messsignal an das Datenverarbeitungsglied 78 überträgt. Von diesem wird dann mittels der steuerbaren Schalteinheit 74 die elektrische Verbindung zwischen der Batterie 72 und dem Motor 34 unterbrochen, so dass der Betrieb des Saugaggregats 30 selbsttätig beendet wird.
- Auch beim Hartflächenabsauggerät 100 ist das Gehäuseoberteil 58 mit dem Gehäuseunterteil 56 lösbar verbindbar. Beim Anpressen der Abstreiflippe 14 gegen die zu reinigende Hartfläche unterliegt das Gehäuseoberteil 58 einer geringfügigen elastischen Verformung. Alternativ oder ergänzend zu dem in die Abstreiflippe 14 integrierten Dehnungsmessstreifen 102 kann bei der in den
Figuren 4 und5 dargestellten Ausführungsform ein Dehnungsmessstreifen 104 zum Einsatz kommen, der unterhalb der Abstreiflippe 14 auf der Innenseite der dem Handgriff 12 abgewandten Gehäusewand 106 des Gehäuseoberteils 58 fixiert ist. Der Dehnungsmessstreifen 104 ist inFigur 4 gestrichelt dargestellt. - Auch mittels des Dehnungsmessstreifens 104 kann eine aus dem Anpressen der Abstreiflippe 14 gegen eine Hartfläche resultierende mechanische Beanspruchung des Hartflächenabsauggeräts 100 erfasst werden, und das Ausgangssignal des Dehnungsmessstreifens 104 kann in gleicher Weise wie das Ausgangssignal des Dehnungsmessstreifens 102 zum selbsttätigen Ein- und Ausschalten des Saugaggregats 30 herangezogen werden.
- Die Steuereinrichtung 108 des Hartflächenabsauggeräts 100 ist in
Figur 5 in Form eines Blockschaltbilds dargestellt. Ein Beschleunigungssensor 82 entfällt beim Hartflächenabsauggerät 100. Das Saugaggregat 30 wird beim Hartflächenabsauggerät 100 zuverlässig selbsttätig ein- und ausgeschaltet aufgrund der Ausgangssignale des Dehnungsmessstreifens 102 und/oder des Dehnungsmessstreifens 104. Bei Anpressen der Abstreiflippe 14 gegen die Hartfläche unterliegen die Abstreiflippe 14 ebenso wie das Gehäuseoberteil 58 einer elastischen Verformung, die von den Dehnungsmessstreifen 102, 104 erfasst wird, und beim Entfernen der Abstreiflippe 14 von der Hartfläche entfällt die elastische Verformung, dies wird von den Dehnungsmessstreifen 102, 104 ebenfalls erfasst. Mittels der Ausgangssignale der Dehnungsmessstreifen 102, 104 kann somit das Saugaggregat 30 auf einfache Weise ein- und ausgeschaltet werden. - Voraussetzung für das selbsttätige Ein- und Ausschalten des Saugaggregates 30 ist auch beim Hartflächenabsauggerät 100, das der Benutzer die Betriebsbereitschaft hergestellt hat, entweder mittels des Tasters 52 oder durch Ergreifen des Handgriffs 12, sofern der Berührungssensor 54 zum Einsatz kommt.
- Der Zeitgeber 80 dient beim Hartflächenabsauggerät 100 als zusätzliche Sicherheitsabschaltung, mit der sichergestellt ist, dass das Saugaggregat 10 unabhängig von einer möglichen mechanischen Beanspruchung des Hartflächenabsauggeräts 100 nach Ablauf eines vorgegebenen Zeitintervalls abgeschaltet wird.
- Aus dem Voranstehenden wird deutlich, dass durch die Erfassung der mechanischen Beanspruchung, der das Hartflächenabsauggerät 10 bzw. 100 beim Anpressen der Abstreiflippe 14 gegen eine Hartfläche unterliegt, das Saugaggregat 30 selbsttätig ein- und ausgeschaltet werden kann. Die Batterie 72 wird somit nur während des eigentlichen Reinigungsvorgangs entladen, so dass der Energieverbrauch der Hartflächenabsauggerät 10 und 100 gering gehalten werden kann. Darüber hinaus zeichnen sich die Hartflächenabsauggeräte 10 und 100 durch eine einfache Handhabung aus.
Claims (27)
- Verfahren zum Betreiben eines tragbaren Hartflächenabsauggeräts (10; 100) zum Absaugen eines Flüssigkeits-Luftgemisches von einer Hartfläche, insbesondere von einer Fensterscheibe, wobei das Hartflächenabsauggerät (10; 100) eine Saugdüse (18) mit mindestens einer an die Hartfläche anpressbaren flexiblen Abstreiflippe (14), ein Saugaggregat (30) sowie eine im Strömungsweg zwischen der Saugdüse (18) und dem Saugaggregat (30) angeordnete Abscheideeinrichtung (24) aufweist, die mit einem Schmutzflüssigkeitstank (44) verbunden ist, und wobei das Hartflächenabsauggerät (10; 100) eine Steuereinrichtung (36) zum Ein- und Ausschalten des Saugaggregats (30) und mindestens eine wiederaufladbare Batterie (72) umfasst, dadurch gekennzeichnet, dass eine aus dem Anpressen der mindestens einen Abstreiflippe (14) gegen die Hartfläche resultierende mechanische Beanspruchung des Hartflächenabsauggeräts (10; 100) erfasst wird und bei Vorliegen dieser mechanischen Beanspruchung das Saugaggregat (30) selbsttätig eingeschaltet wird.
- Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass bei Wegfall der erfassten mechanischen Beanspruchung das Saugaggregat (30) selbsttätig ausgeschaltet wird.
- Verfahren nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass das Hartflächenabsauggerät (10; 100) zunächst in Betriebsbereitschaft versetzt wird und dann bei Vorliegen einer aus dem Anpressen der mindestens einen Abstreiflippe gegen die Hartfläche resultierenden mechanischen Beanspruchung das Saugaggregat (30) selbsttätig eingeschaltet wird.
- Verfahren nach Anspruch 3, dadurch gekennzeichnet, dass das Hartflächenabsauggerät (10; 100) manuell in Betriebsbereitschaft versetzt wird.
- Verfahren nach einem der voranstehenden Ansprüche, dadurch gekennzeichnet, dass das Saugaggregat (30) nach Ablauf eines vorgegebenen oder vorgebbaren Zeitintervalls selbsttätig ausgeschaltet wird.
- Verfahren nach einem der voranstehenden Ansprüche, dadurch gekennzeichnet, dass eine Bewegung des Hartflächenabsauggeräts (10) im Raum erfasst wird und dass nach Ablauf eines vorgegebenen oder vorgebbaren Zeitintervalls, in dem das Hartflächenabsauggerät (10) nicht bewegt wurde, das Saugaggregat (30) selbsttätig ausgeschaltet wird.
- Verfahren nach einem der voranstehenden Ansprüche, dadurch gekennzeichnet, dass eine aus dem Anpressen der mindestens einen Abstreiflippe gegen die Hartfläche resultierende Relativbewegung zwischen zwei Bauteilen (56, 58) des Hartflächenabsauggeräts (10) erfasst und daraufhin das Saugaggregat (30) selbsttätig eingeschaltet wird.
- Verfahren nach Anspruch 7, dadurch gekennzeichnet, dass die Relativbewegung zwischen den beiden Bauteilen (56, 58) elektromechanisch, piezoelektrisch, optisch, induktiv und/oder kapazitiv erfasst wird.
- Verfahren nach einem der voranstehenden Ansprüche, dadurch gekennzeichnet, dass eine aus dem Anpressen der mindestens einen Abstreiflippe gegen die Hartfläche resultierende elastische Verformung eines Bauteils (58) des Hartflächenabsauggeräts (100) erfasst und daraufhin das Saugaggregat selbsttätig eingeschaltet wird.
- Verfahren nach Anspruch 9, dadurch gekennzeichnet, dass die Verformung elektromechanisch, piezoelektrisch, optisch, induktiv und/oder kapazitiv erfasst wird.
- Tragbares Hartflächenabsauggerät (10; 100) zum Absaugen eines Flüssigkeits-Luftgemisches von einer Hartfläche, beispielsweise von einer Fensterscheibe, insbesondere zur Durchführung des Verfahrens nach einem der voranstehenden Ansprüche, wobei das Hartflächenabsauggerät (10; 100) eine Saugdüse (18) mit mindestens einer an die Hartfläche anpressbaren flexiblen Abstreiflippe (14), ein Saugaggregat (30) sowie eine im Strömungsweg zwischen der Saugdüse (18) und dem Saugaggregat (30) angeordnete Abscheideeinrichtung (24) aufweist, die mit einem Schmutzflüssigkeitstank (44) verbunden ist, und wobei das Hartflächenabsauggerät (10; 100) eine Steuereinrichtung (36) zum Ein- und Ausschalten des Saugaggregats (30) und mindestens eine wiederaufladbare Batterie (72) umfasst, dadurch gekennzeichnet, dass die Steuereinrichtung (36) eine Beanspruchungserfassungsvorrichtung aufweist, wobei mittels der Beanspruchungserfassungsvorrichtung eine aus dem Anpressen der mindestens einen Abstreiflippe (14) gegen die Hartfläche resultierende mechanische Beanspruchung des Hartflächenabsauggeräts (10; 100) erfassbar und das Saugaggregat (30) mittels der Beanspruchungserfassungsvorrichtung selbsttätig einschaltbar ist.
- Hartflächenabsauggerät nach Anspruch 11, dadurch gekennzeichnet, dass das Saugaggregat (30) bei Wegfall der erfassten mechanischen Beanspruchung mittels der Beanspruchungserfassungsvorrichtung selbsttätig ausschaltbar ist.
- Hartflächenabsauggerät nach Anspruch 11 oder 12, dadurch gekennzeichnet, dass das Hartflächenabsauggerät (10; 100) vom Benutzer in Betriebsbereitschaft versetzbar und das Saugaggregat (30) nur bei Vorliegen der Betriebsbereitschaft mittels der Beanspruchungserfassungsvorrichtung selbsttätig ein- und/oder ausschaltbar ist.
- Hartflächenabsauggerät nach Anspruch 13, dadurch gekennzeichnet, dass das Hartflächenabsauggerät (10; 100) eine Schalteinrichtung (52) aufweist, insbesondere einen Hauptschalter, die vom Benutzer manuell betätigbar ist, wobei durch Betätigen der Schalteinrichtung (52) das Hartflächenabsauggerät (10; 100) in Betriebsbereitschaft versetzbar ist.
- Hartflächenabsauggerät nach Anspruch 13 oder 14, dadurch gekennzeichnet, dass das Hartflächenabsauggerät (10; 100) einen Berührungssensor (54) aufweist, wobei vom Berührungssensor (54) das Ergreifen des Hartflächenabsauggeräts (10; 100) durch den Benutzer erfassbar und dadurch das Hartflächenabsauggerät (10; 100) in Betriebsbereitschaft versetzbar ist.
- Hartflächenabsauggerät nach einem der Ansprüche 11 bis 15, dadurch gekennzeichnet, dass das Hartflächenabsauggerät (10; 100) einen Zeitgeber (80) aufweist und das Saugaggregat (30) nach Ablauf eines vorgegebenen oder vorgebbaren Zeitintervalls selbsttätig ausschaltbar ist.
- Hartflächenabsauggerät nach einem der Ansprüche 11 bis 16, dadurch gekennzeichnet, dass das Hartflächenabsauggerät (10) einen Bewegungssensor (82) und einen Zeitgeber (80) aufweist, wobei mittels des Bewegungssensors (82) eine Bewegung des Hartflächenabsauggeräts (10) im Raum erfassbar und das Saugaggregat (30) nach Ablauf eines vorgegebenen oder vorgebbaren Zeitintervalls, in dem das Hartflächenabsauggerät (10) nicht bewegt wurde, selbsttätig ausschaltbar ist.
- Hartflächenabsauggerät nach einem der Ansprüche 11 bis 17, dadurch gekennzeichnet, dass das Hartflächenabsauggerät (10) ein erstes und ein zweites Bauteil aufweist, die durch Anpressen der mindestens einen Abstreiflippe (14) gegen die Hartfläche relativ zueinander bewegbar sind, und dass die Beanspruchungserfassungsvorrichtung mindestens ein Erfassungsglied (40) aufweist, wobei mittels des Erfassungsglieds (40) die Relativbewegung der beiden Bauteile erfassbar ist.
- Hartflächenabsauggerät nach Anspruch 18, dadurch gekennzeichnet, dass die Relativbewegung der beiden Bauteile mittels des mindestens einen Erfassungsglieds (40) elektromechanisch, piezoelektrisch, optisch, induktiv und/oder kapazitiv erfassbar ist.
- Hartflächenabsauggerät nach Anspruch 18 oder 19, dadurch gekennzeichnet, dass das mindestens eine Erfassungsglied als Mikroschalter (40) und/oder Potentiometer ausgestaltet ist.
- Hartflächenabsauggerät nach einem der Ansprüche 18 bis 20, dadurch gekennzeichnet, dass die beiden Bauteile als Gehäuseteile (56, 58) des Hartflächenabsauggeräts (10) ausgestaltet sind.
- Hartflächenabsauggerät nach Anspruch 21, dadurch gekennzeichnet, dass ein erstes Gehäuseteil (58) die Abscheideeinrichtung (24) und ein zweites Gehäuseteil (56) das Saugaggregat (30) aufnimmt.
- Hartflächenabsauggerät nach einem der Ansprüche 11 bis 22, dadurch gekennzeichnet, dass das Hartflächenabsauggerät (100) zumindest ein durch Anpressen der mindestens einen Abstreiflippe (14) gegen die Hartfläche elastisch verformbares Bauteil aufweist und dass die Beanspruchungserfassungsvorrichtung mindestens einen Verformungssensor (102, 104) aufweist, wobei mittels des Verformungssensors (102, 104) die Verformung des verformbaren Bauteils erfassbar ist.
- Hartflächenabsauggerät nach Anspruch 23, dadurch gekennzeichnet, dass die Verformung des verformbaren Bauteils mittels des mindestens einen Verformungssensors elektromechanisch, piezoelektrisch, optisch, induktiv und/oder kapazitiv erfassbar ist.
- Hartflächenabsauggerät nach Anspruch 24, dadurch gekennzeichnet, dass der mindestens eine Verformungssensor als Dehnungsmessstreifen (102, 104) ausgestaltet ist.
- Hartflächenabsauggerät nach Anspruch 23, 24 oder 25, dadurch gekennzeichnet, dass zumindest ein Verformungssensor (102) in eine Abstreiflippe (14) integriert ist.
- Hartflächenabsauggerät nach einem der Ansprüche 23 bis 26, dadurch gekennzeichnet, dass zumindest ein Verformungssensor (104) an einem Gehäuseteil des Hartflächenabsauggeräts (100) festgelegt ist.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102012107997.8A DE102012107997A1 (de) | 2012-08-29 | 2012-08-29 | Verfahren zum Betreiben eines tragbaren Hartflächenabsauggeräts und Hartflächenabsauggerät zur Durchführung des Verfahrens |
| PCT/EP2013/066786 WO2014032945A1 (de) | 2012-08-29 | 2013-08-12 | Verfahren zum betreiben eines tragbaren hartflächenabsauggeräts und hartflächenabsauggerät zur durchführung des verfahrens |
| EP13750021.1A EP2890285B1 (de) | 2012-08-29 | 2013-08-12 | Tragbares hartflächenabsauggerät |
Related Parent Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP13750021.1A Division-Into EP2890285B1 (de) | 2012-08-29 | 2013-08-12 | Tragbares hartflächenabsauggerät |
| EP13750021.1A Division EP2890285B1 (de) | 2012-08-29 | 2013-08-12 | Tragbares hartflächenabsauggerät |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3127461A1 EP3127461A1 (de) | 2017-02-08 |
| EP3127461B1 true EP3127461B1 (de) | 2019-03-27 |
Family
ID=48986110
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP13750021.1A Active EP2890285B1 (de) | 2012-08-29 | 2013-08-12 | Tragbares hartflächenabsauggerät |
| EP16185140.7A Active EP3127461B1 (de) | 2012-08-29 | 2013-08-12 | Verfahren zum betreiben eines tragbaren hartflächenabsauggeräts und hartflächenabsauggerät zur durchführung des verfahrens |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP13750021.1A Active EP2890285B1 (de) | 2012-08-29 | 2013-08-12 | Tragbares hartflächenabsauggerät |
Country Status (4)
| Country | Link |
|---|---|
| EP (2) | EP2890285B1 (de) |
| CN (1) | CN104602584B (de) |
| DE (1) | DE102012107997A1 (de) |
| WO (1) | WO2014032945A1 (de) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102012107994A1 (de) * | 2012-08-29 | 2014-03-06 | Alfred Kärcher Gmbh & Co. Kg | Verfahren zum Betreiben eines tragbaren Hartflächenabsauggeräts und Hartflächenabsauggerät zur Durchführung des Verfahrens |
| DE102014110083A1 (de) * | 2014-07-17 | 2016-01-21 | Vorwerk & Co. Interholding Gmbh | Verfahren zum Betrieb eines elektromotorisch angetriebenen Gerätes |
| CN104146654B (zh) * | 2014-08-08 | 2016-05-04 | 南京九致信息科技有限公司 | 一种用于清洗幕墙玻璃的工具 |
| DE102014116978A1 (de) * | 2014-11-20 | 2016-05-25 | Vorwerk & Co. Interholding Gesellschaft mit beschränkter Haftung | Reinigungsgerät mit einem durch einen Motor angetriebenen Gebläse und einem Saugkanal |
| CN104706272A (zh) * | 2015-03-10 | 2015-06-17 | 中山市众智电器有限公司 | 液体抽汲装置及其储液罐组件 |
| WO2016173859A2 (de) * | 2015-04-30 | 2016-11-03 | Marianne Zippel | Saugeinheit sowie sauganlagae mit einer solchen saugeinheit |
| CN106308670B (zh) * | 2015-06-17 | 2021-05-14 | 苏州宝时得电动工具有限公司 | 硬表面清洁装置 |
| WO2017108088A1 (de) * | 2015-12-21 | 2017-06-29 | Alfred Kärcher Gmbh & Co. Kg | Saugdüse für ein hartflächenreinigungsgerät und hartflächenreinigungsgerät mit einer derartigen saugdüse |
| US11202543B2 (en) | 2018-01-17 | 2021-12-21 | Techtronic Floor Care Technology Limited | System and method for operating a cleaning system based on a surface to be cleaned |
| US10820762B2 (en) | 2018-08-27 | 2020-11-03 | Tti (Macao Commercial Offshore) Limited | Floor cleaner |
| DE102019211014B4 (de) * | 2019-07-25 | 2024-07-18 | Vorwerk & Co. Interholding Gmbh | Haushaltsreinigungsgerät mit Akkuantrieb |
| WO2021127131A1 (en) | 2019-12-19 | 2021-06-24 | Techtronic Cordless Gp | Floor cleaner |
| US11779182B1 (en) | 2022-12-14 | 2023-10-10 | Bissell Inc. | Surface cleaning apparatus |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE9217416U1 (de) * | 1992-12-19 | 1993-04-08 | Fa. Fedag, Romanshorn | Reinigungswerkzeug mit angetriebener Bürstenwalze |
| DE4427639A1 (de) * | 1993-12-04 | 1995-06-08 | Vorwerk Co Interholding | Mittels eines Elektromotors betriebener Staubsauger |
| DE10038254A1 (de) * | 2000-08-04 | 2002-04-25 | Vorwerk Co Interholding | Verformbare Leiste |
| US20060048800A1 (en) * | 2004-09-09 | 2006-03-09 | Rast Rodger H | Automated building exterior cleaning apparatus |
| DE102008004966A1 (de) | 2008-01-11 | 2009-07-23 | Alfred Kärcher Gmbh & Co. Kg | Saugdüse |
| DE102008004965B3 (de) * | 2008-01-11 | 2009-05-14 | Alfred Kärcher Gmbh & Co. Kg | Tragbares Hartflächenabsauggerät |
| DE102008004964B3 (de) | 2008-01-11 | 2009-05-14 | Alfred Kärcher Gmbh & Co. Kg | Hartflächenabsauggerät |
| JP4968189B2 (ja) * | 2008-06-17 | 2012-07-04 | パナソニック株式会社 | 電気掃除機 |
| CN102113855A (zh) * | 2010-01-04 | 2011-07-06 | 乐金电子(天津)电器有限公司 | 具有尖吸嘴功能的吸尘器吸头 |
| DE102011050697A1 (de) * | 2011-05-27 | 2012-11-29 | Leifheit Ag | Flüssigkeitssaugvorrichtung zum Abziehen und Aufsaugen von Flüssigkeiten |
| WO2013143616A1 (de) * | 2012-03-30 | 2013-10-03 | Alfred Kärcher Gmbh & Co. Kg | Hartflächenabsauggerät |
-
2012
- 2012-08-29 DE DE102012107997.8A patent/DE102012107997A1/de not_active Withdrawn
-
2013
- 2013-08-12 EP EP13750021.1A patent/EP2890285B1/de active Active
- 2013-08-12 EP EP16185140.7A patent/EP3127461B1/de active Active
- 2013-08-12 CN CN201380044596.9A patent/CN104602584B/zh active Active
- 2013-08-12 WO PCT/EP2013/066786 patent/WO2014032945A1/de active Application Filing
Non-Patent Citations (1)
| Title |
|---|
| None * |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2890285B1 (de) | 2016-10-05 |
| EP3127461A1 (de) | 2017-02-08 |
| EP2890285A1 (de) | 2015-07-08 |
| WO2014032945A1 (de) | 2014-03-06 |
| CN104602584B (zh) | 2017-08-29 |
| CN104602584A (zh) | 2015-05-06 |
| DE102012107997A1 (de) | 2014-03-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3127461B1 (de) | Verfahren zum betreiben eines tragbaren hartflächenabsauggeräts und hartflächenabsauggerät zur durchführung des verfahrens | |
| EP2890284B1 (de) | Tragbares hartflächenabsauggerät | |
| EP3795055B1 (de) | Bodenreinigungsmaschine | |
| EP1519673B8 (de) | Verfahren zum betreiben eines bodenreinigungssystem sowie bodenreinigungssystem zur anwendung des verfahrens | |
| EP2672870B1 (de) | Verfahren zum abreinigen eines filters eines staubsaugers sowie staubsauger zur durchführung des verfahrens | |
| WO1996032876A1 (de) | Sauggerätevorsatz zur feuchtreinigung von flächen | |
| EP3727120B1 (de) | Effiziente filterabreinigung | |
| WO2014032712A1 (de) | Hartflächenabsaugsystem mit verlängerungseinrichtung | |
| DE102013103086A1 (de) | Absaugstation für ein selbsttätig verfahrbares Bodenreinigungsgerät sowie Kombination einer Absaugstation mit einem solchen Gerät | |
| EP2830473A1 (de) | Hartflächenabsauggerät | |
| EP3772315B1 (de) | Reinigungsgerät | |
| EP2644076B1 (de) | Sauger | |
| DE102010038095A1 (de) | Entleerungsstation für einen akkumulatorbetriebenen Elektrostaubsauger | |
| EP3581082A1 (de) | Saugroboter und verfahren zur steuerung eines saugroboters | |
| DE102013108905A1 (de) | Zur Feuchtreinigung ausgebildetes Reinigungsgerät | |
| DE102011006539B4 (de) | Staubsauger und Verfahren zum betriebsdauerabhängigen Betreiben eines Staubsaugers | |
| DE102019102382A1 (de) | Sauggutsammelstation und System aus einer Sauggutsammelstation und einem Saugreinigungsgerät | |
| EP2974639B1 (de) | Verfahren zum betrieb eines elektromotorisch angetriebenen gerätes | |
| DE3120250C2 (de) | Handgerät zur Entstaubung | |
| DE19905444C2 (de) | Vorrichtung zum Saugen | |
| DE102021113323A1 (de) | Tragbares Reinigungsgerät | |
| DE102021109222A1 (de) | Staubsauger | |
| DE29902310U1 (de) | Vorrichtung zum Saugen | |
| DE2729399A1 (de) | Reinigungsmaschine, insbesondere fuer die nassreinigung | |
| DE102019133721A1 (de) | Vorsatzgerät für ein Reinigungsgerät und Reinigungsgerät mit Feuchteerkennung |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AC | Divisional application: reference to earlier application |
Ref document number: 2890285 Country of ref document: EP Kind code of ref document: P |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20170804 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: A47L 1/05 20060101ALI20180614BHEP Ipc: A47L 5/24 20060101AFI20180614BHEP Ipc: A47L 11/40 20060101ALI20180614BHEP Ipc: A47L 7/00 20060101ALI20180614BHEP Ipc: A47L 9/28 20060101ALI20180614BHEP |
|
| INTG | Intention to grant announced |
Effective date: 20180704 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: ALFRED KAERCHER SE & CO. KG |
|
| GRAJ | Information related to disapproval of communication of intention to grant by the applicant or resumption of examination proceedings by the epo deleted |
Free format text: ORIGINAL CODE: EPIDOSDIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R108 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTC | Intention to grant announced (deleted) | ||
| INTG | Intention to grant announced |
Effective date: 20181119 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AC | Divisional application: reference to earlier application |
Ref document number: 2890285 Country of ref document: EP Kind code of ref document: P |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1111993 Country of ref document: AT Kind code of ref document: T Effective date: 20190415 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190627 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20190327 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190628 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190627 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190727 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190727 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 |
|
| 26N | No opposition filed |
Effective date: 20200103 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20190812 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190831 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190831 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190812 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20190831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190831 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190812 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190831 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190812 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 1111993 Country of ref document: AT Kind code of ref document: T Effective date: 20190812 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190812 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20130812 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190327 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230521 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20230711 Year of fee payment: 11 |