EP3081737A2 - Appareil de forage destine a pratiquer un forage tube et procede de fonctionnement d'un appareil de forage - Google Patents
Appareil de forage destine a pratiquer un forage tube et procede de fonctionnement d'un appareil de forage Download PDFInfo
- Publication number
- EP3081737A2 EP3081737A2 EP16153082.9A EP16153082A EP3081737A2 EP 3081737 A2 EP3081737 A2 EP 3081737A2 EP 16153082 A EP16153082 A EP 16153082A EP 3081737 A2 EP3081737 A2 EP 3081737A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- support tube
- depth
- drilling
- drill
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000005553 drilling Methods 0.000 title claims abstract description 83
- 238000000034 method Methods 0.000 title claims abstract description 31
- 238000003780 insertion Methods 0.000 claims abstract description 24
- 230000037431 insertion Effects 0.000 claims abstract description 24
- 239000002689 soil Substances 0.000 claims abstract description 20
- 239000000463 material Substances 0.000 claims abstract description 10
- 238000005259 measurement Methods 0.000 claims description 14
- 238000001514 detection method Methods 0.000 claims description 7
- 239000000654 additive Substances 0.000 claims description 2
- 230000000996 additive effect Effects 0.000 claims description 2
- 230000035515 penetration Effects 0.000 abstract description 9
- 238000011161 development Methods 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 238000012937 correction Methods 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 239000003673 groundwater Substances 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000000454 anti-cipatory effect Effects 0.000 description 1
- 238000009412 basement excavation Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 238000002604 ultrasonography Methods 0.000 description 1
Images


Classifications
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B47/00—Survey of boreholes or wells
- E21B47/09—Locating or determining the position of objects in boreholes or wells, e.g. the position of an extending arm; Identifying the free or blocked portions of pipes
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02D—FOUNDATIONS; EXCAVATIONS; EMBANKMENTS; UNDERGROUND OR UNDERWATER STRUCTURES
- E02D7/00—Methods or apparatus for placing sheet pile bulkheads, piles, mouldpipes, or other moulds
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B15/00—Supports for the drilling machine, e.g. derricks or masts
- E21B15/003—Supports for the drilling machine, e.g. derricks or masts adapted to be moved on their substructure, e.g. with skidding means; adapted to drill a plurality of wells
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B19/00—Handling rods, casings, tubes or the like outside the borehole, e.g. in the derrick; Apparatus for feeding the rods or cables
- E21B19/24—Guiding or centralising devices for drilling rods or pipes
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B3/00—Rotary drilling
- E21B3/02—Surface drives for rotary drilling
- E21B3/022—Top drives
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B3/00—Rotary drilling
- E21B3/02—Surface drives for rotary drilling
- E21B3/03—Surface drives for rotary drilling with an intermittent unidirectional rotation of the tool
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B44/00—Automatic control systems specially adapted for drilling operations, i.e. self-operating systems which function to carry out or modify a drilling operation without intervention of a human operator, e.g. computer-controlled drilling systems; Systems specially adapted for monitoring a plurality of drilling variables or conditions
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B47/00—Survey of boreholes or wells
- E21B47/04—Measuring depth or liquid level
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B7/00—Special methods or apparatus for drilling
- E21B7/002—Drilling with diversely driven shafts extending into the borehole
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B7/00—Special methods or apparatus for drilling
- E21B7/02—Drilling rigs characterised by means for land transport with their own drive, e.g. skid mounting or wheel mounting
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B7/00—Special methods or apparatus for drilling
- E21B7/20—Driving or forcing casings or pipes into boreholes, e.g. sinking; Simultaneously drilling and casing boreholes
Definitions
- the invention relates to a drilling device for creating a cased bore, comprising a first drill drive for rotationally driving a drill string, at the lower end of which a drilling tool for removing soil material is arranged, a mast along which the first drill drive can be moved with a carriage, and a second drive, with which a support tube for the bore can be introduced into the ground, according to the preamble of claim 1.
- the invention further relates to a method for operating a drilling device, with which a bore is created with a support tube, according to claim 6.
- a drill for creating a cased bore is approximately from the EP 1 548 226 A1 known. Cased holes are needed, for example, when creating foundation piles in loose ground.
- the bore is provided with a support tube which stabilizes the bore wall and ensures that no soil material falls into the wellbore and this does not collapse.
- a common method is to introduce a support tube substantially simultaneously with the creation of the bore in the ground.
- a generic drill is used, which has a first drill drive for rotationally driving a drilling tool, is removed by which soil material and discharged from the wellbore. Furthermore, the drill has a second drive, with which the support tube is screwed into the ground.
- the support tube can precede the drilling tool.
- This variant of the method is useful, for example, when groundwater-containing soil layers are cut through, for example.
- the support tube ensures that groundwater does not penetrate into the hole or penetrate into other soil layers.
- An anticipatory introduction of the support tube serves to secure against the foundation breakage.
- the support tube is successively composed of a plurality of tubular elements.
- the drilling tool can precede the support tube. This is particularly useful when penetrating harder soil layers, as facilitated by an advance of the drilling tool, the subsequent introduction of the support tube.
- the two process variants can also be combined with one another, depending on the soil layers to be penetrated.
- the creation of a cased bore requires significant experience of the operator of the drill.
- the invention has for its object to provide a drill for creating a cased bore and a method for operating such a drill, with which a cased bore can be created efficiently and particularly reliable.
- the drilling apparatus is characterized in that a computer unit is provided, in which a current drilling depth of the drilling tool and an insertion depth of the support tube are to be specified and that a monitor is provided, on which by the computer unit, the current drilling depth in relation to the insertion depth of the support tube can be displayed ,
- a basic idea of the invention is to display the current drilling depth in relation to the insertion depth of the support tube to the operator via a computer unit on a monitor.
- the position of support tube and drilling tool is thus readily apparent.
- it can be readily determined whether the support tube precedes the drilling tool or vice versa. This makes it much easier for the operator to create a cased hole.
- it can also change depending on the depth between the process variants, where once a support tube and once the drilling tool leads.
- the appropriate process variant can always be selected. This allows a particularly efficient and thus cost-effective creation of a cased bore.
- the computer unit may be fully or partially integrated in the control of the drill or form an independent unit, which may also be retrofitted.
- a preferred embodiment of the invention is that the second drive is an output element, which is driven by a motor of the first drill drive.
- the first drill drive preferably consists of one or more hydraulic motors. These drive preferably via a corresponding reduction the drill pipe, in particular a telescopic Kelly drill pipe to.
- the torque of the motor of the drill drive is transmitted to the support tube via the annular output element.
- the second drive consists essentially of the transmission, without even having a separate engine.
- the drill mast has only one motor unit with two output options. Once Kellystange and thus the drilling tool is driven via the hollow shaft passage and the other is driven via a flanged at the lower end of the hollow shaft outlet via a preferably interposed Kardangelenk a turntable with which the drill pipe can be screwed.
- the rotary gearbox is provided with Kelly rod carrier cups installed at the top and a turntable flange screwed down at the bottom.
- the first drill drive and the second drive are arranged together on the carriage.
- the carriage also referred to as Bohrantriebsschlitten is moved over a feed winch along the mast.
- the drill string protrudes through the annular first drill drive, wherein the drill string is vertically adjustable with the drilling tool via a main winch on the drill.
- the drill drive preferably forms a lower stop for the drill pipe.
- the second drive is a casing machine, which is attached to a substructure of the drill.
- the casing machine constitutes a drive unit independent of the first drill drive.
- the casing machine may comprise a suitable motor or drive which can exert a required torque and possibly a necessary axial force on the support tube for introduction into the ground.
- the casing has a pivoting collet for rotating insertion of the support tube in the ground.
- the collet can include the support tube by means of hydraulic cylinders and thus produce a rotationally fixed connection to the support tube.
- a rotational movement and a torque can be applied to the support tube, so that this is screwed approximately in the ground.
- a depth of insertion of the support tube is indicated in the ground in a computer unit, detects a current drilling depth of the drilling tool when creating the hole and in the computer unit is specified and by means of the computer unit on a monitor, the current drilling depth is displayed in relation to the insertion depth of the support tube.
- the method is particularly suitable for operating a drilling device described above. This results in the advantages described above.
- the detection of the instantaneous drilling depth of the drilling tool takes place via a first sensor device.
- the sensor device may in particular comprise measuring devices which have a unwound length of the main rope of the main winch for vertical movement of the drill string and / or for determining the unwound length of the feed winch through which the carriage is moved along the mast with the first drill drive.
- other sensor devices for determining the current drilling depth can be used, such as optical sensors or a depth measurement by means of ultrasound or laser.
- a further advantageous embodiment of the method according to the invention is that the inputting of the insertion depth of the support tube takes place manually via an operating terminal or automatically via a second sensor device.
- the length of the support tube can be entered by the operator directly into the computer unit as a measure of the penetration depth, for example via a corresponding input field which can be displayed on the monitor. It is assumed that the support tube is introduced in total in the soil.
- the input may also be automatic, such as by means for reading a corresponding mark on the support tube, such as an RFID tag. In this mark, all the essential information about the support tube, in particular over the length and thus the penetration depth of the support tube, be stored. Furthermore, it is preferably provided to determine an instantaneous insertion depth of the support tube by the second sensor device.
- the instantaneous insertion depth of the support tube can be reliably determined by a corresponding sensor device. This can be done for example by detecting the movement of the collet or also via optical sensors for determining the position of the support tube.
- a preferred variant of the method according to the invention is that the detection of the current drilling depth by means of a position measurement of a carriage of a first drill drive and / or a position measurement of a drill string, at the lower end of the drilling tool is attached.
- the sensor devices described above can be used.
- a representation of the current drilling depth in relation to the insertion depth of the support tube can be done in basically any way.
- the current position of the drilling tool to the lower end of the support tube is particularly clear and illustrative.
- the support tube may be illustrated in a cross-sectional view with two lateral lines and a corresponding horizontal transverse line for defining a lower and an upper edge.
- the drilling tool may be pictorially or stylized as a horizontal bar in the support tube.
- the inventive method is further developed in an advantageous manner that the support tube is composed of at least two support tube elements, wherein an additive overall representation of the penetration depth is provided.
- the maximum insertion depth of the support tube is increased and adjusted accordingly. Accordingly, the presentation changes on the monitor.
- the support tube with the above-added additional support tube element is then introduced further into the ground, the insertion depth and the relevant representation on the monitor changed accordingly.
- the introduced support tube can be composed of a plurality of support tube elements of different lengths.
- the length of the individual support tube elements can be entered into the computer unit via a corresponding input field, which can be displayed on the monitor.
- the input can also be made by a selection of predetermined standard lengths of support tube elements.
- an automatic detection and input is provided, such as with a previously described RFID tag on the support tube element.
- a further preferred embodiment of the method according to the invention consists in that the support tube or the support tube element is displayed on the monitor on the monitor before and after insertion into the ground.
- the support tube is shown with the above-added additional support tube element in an initial state on the monitor.
- the support tube or the corresponding support tube element is above a ground surface shown.
- the inserted support tube is shown with the maximum insertion depth or the actual, currently achieved insertion depth.
- the support or drill pipe can be screwed into the subsoil both with the rotary drive which can be displaced on the mast of the drill by means of a turntable and with the piping system.
- the current penetration depth of the drill pipe can be determined by means of the sensors mounted on the feed system.
- the position of the rotary drive along the mast is determined and charged with the current drilling depth of the drilling tool.
- the position of the rotary drive can be done via displacement transducer along the mast or transducer on the feed system, for example on the feed rope.
- the total length of the drill pipe can be determined either by entering the driver or by automatic detection of the individual drill pipe shots using, for example, RFID tags.
- the length of the individual drill pipe shots is summed to a total drill pipe length.
- the drilling depth of the drilling tool can be determined, for example, via the depth measurement of the main winch, which moves the Kelly bar, and the current locking position of the Kelly bar. But it is also possible to specify by entering the driver a zero position of the boring depth when reaching the Bohrrohroberkante by the drill bit sole.
- the current drilling depth can be calculated with the previously calculated drill pipe total length and a difference between the drilling depth and the drill pipe installation length can be determined.
- the installation depth of the drill pipe is determined by a measuring system on the drill mast, it must be determined by switching or triggering whether the drill pipe is screwed in or the drill pipe is drilled out. This trigger can be done automatically either by entering the driver or automatic turntable by pressing the pipe fixtures.
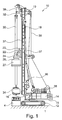
- An inventive drill 10 according to Fig. 1 has a trained as a crawler undercarriage 12 and a rotatably mounted thereon superstructure 14.
- the undercarriage 12 and the uppercarriage 14 form a substructure 15.
- the drive units and the operator station for the drill 10 are arranged in a known manner.
- a vertical mast 18 with an upper mast head 19 is adjustably mounted via a Anschkinematik 16 with neck cylinders.
- a carriage 20 is slidably guided.
- a first drill drive 22 is provided which has a hydraulic motor 24.
- a second drive 26 with a sleeve-shaped rotary joint 27 for producing a rotationally fixed connection to a support tube 4 is provided on the carriage 20.
- the second drive 26 consists essentially of a gear connection to the first drill drive 22 with the hydraulic motor 24, so as to apply a torque to the rotary joint 27 and thus the support tube 4.
- the approximately sleeve-shaped first drill drive 22 is penetrated by a drill string 30, which is designed as a Kelly linkage with outer Mitêtartn.
- the drill string 30 has an upper suspension 32, with which the drill pipe 30 is connected to a main cable 39.
- the main cable 39 is guided over pulleys on the mast head 19 to a main winch 38 at the top of the upper carriage 14. By operating the main winch 38, the drill pipe 30 can be moved vertically.
- the carriage 20 is connected to a feed cable 37, which is guided above and below the carriage 20 along the mast 18 and by a feed winch 36 is pressed. By the feed winch 36, the carriage 20 along a guide of the mast 18 can be moved up or down.
- a drilling tool 34 for removing soil material is attached on a lower side of the drill string 30, a drilling tool 34 for removing soil material is attached.
- the drilling tool 34 is in the illustrated embodiment according to Fig. 1 as a drilling bucket.
- the diameter of the drilling tool 34 is designed so that it can be inserted into the inner cavity of the support tube 4.
- a cased bore in the bottom 1 can be created.
- a coordinated introduction of the support tube 4 with the sinking of the bore is necessary.
- the support tube 4 is introduced into the ground 1 up to a first penetration depth.
- FIG. 2a shows a bar chart provided according to the invention that can be displayed on a monitor to the operator in the drill 10. As shown Fig. 2a there is still no excavation done.
- the tube length of the support tube 4 can be entered by the operator on the monitor of a computer unit.
- a lower edge of the drilling tool 34 is set to zero at the upper edge of the support tube.
- the relation between drilling tool 34 and support tube 4 is set in the computer unit.
- Fig. 2b As a next step, the bottom 1 is bored out of the support tube 4 with the drilling tool 34.
- the progress of drilling on the monitor of the computer unit can be controlled.
- Both the length of the support tube 4 and the drilling depth achieved are displayed graphically on the monitor of the computer unit.
- the shifted downward horizontal bar within the support tube 4 in Fig. 2b indicates the drilling depth of the drilling tool 34.
- the drilling tool 34 can be displayed with an additional horizontal bar within the support tube 4 on the monitor in the control station.
- the difference of the support tube length and the achieved drilling depth as a measured value of the position of the drilling tool 34 to the support tube 4 on Monitor are displayed.
- the device driver in addition to the graph receives a measure of whether bored with the drilling tool 34 relative to the support tube 4 leading or lagging. This measure is of crucial importance in certain soil layers for the subsequent quality of the bored pile produced.
- the support tube 4 is again coupled to the second drive 26, which may also be referred to as a power rotary head, and further screwed into the bottom 1.
- the recording of the new reference of the depth measurement is done by a reset of the device driver with the lower edge of the drilling tool 34 at the upper edge of the support tube 4 or by measuring the depth of penetration reached via the depth measurement on the feed winch 36 by means of a second sensor device.
- a special mode for input by the device driver or an automatic detection of the coupling of the second drive 26 with the support tube 4 can take place in the computer unit.
- Fig. 2e the placement of an additional support tube element 5, whereby an extended support tube 4 is formed.
- the length of the support tube 4 is determined in the computer unit and graphically according to Fig. 2e shown.
- the length of the additionally mounted support tube element 5 is added to the previously known length of the support tube 4.
- the recognition of the length of the additional mounted support tube element 5 is done by entering the device driver in the computer unit or by an automatic detection of the tube length by an identification system of the support tubes 4 / support tube elements 5, such as by means of an RFID tag.
- FIGS. 2a to 2i The method shown shows a leading edge of the support tube 4 with respect to the bore 2.
- the graphical representation of this is readily controllable for the operator.
- a leading edge of the bore relative to the support tube can take place.
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Physics & Mathematics (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Geochemistry & Mineralogy (AREA)
- Fluid Mechanics (AREA)
- Environmental & Geological Engineering (AREA)
- Mechanical Engineering (AREA)
- Geophysics (AREA)
- Structural Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Civil Engineering (AREA)
- Paleontology (AREA)
- Earth Drilling (AREA)
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102015105908.8A DE102015105908B4 (de) | 2015-04-17 | 2015-04-17 | Bohrgerät zum Erstellen einer verrohrten Bohrung und Verfahren zum Betreiben eines Bohrgerätes |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP3081737A2 true EP3081737A2 (fr) | 2016-10-19 |
| EP3081737A3 EP3081737A3 (fr) | 2016-11-02 |
| EP3081737B1 EP3081737B1 (fr) | 2018-03-14 |
Family
ID=55273134
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP16153082.9A Active EP3081737B1 (fr) | 2015-04-17 | 2016-01-28 | Appareil de forage destine a pratiquer un forage tube et procede de fonctionnement d'un appareil de forage |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10344586B2 (fr) |
| EP (1) | EP3081737B1 (fr) |
| CN (1) | CN106065767B (fr) |
| DE (1) | DE102015105908B4 (fr) |
| ES (1) | ES2669509T3 (fr) |
| TR (1) | TR201807098T4 (fr) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10364604B2 (en) * | 2015-12-18 | 2019-07-30 | Soilmec S.P.A | Device and method for the movement and mutual assembly of segments of an excavation battery, for example auger or rod segments |
| EP3530813A1 (fr) * | 2018-02-26 | 2019-08-28 | Liebherr-Werk Nenzing GmbH | Procédé de mesure de profondeur du tubage dans une fondation sur pilotis ainsi qu'appareil rapporté pour la fondation sur pilotis |
| EP3533933A1 (fr) * | 2018-02-26 | 2019-09-04 | Liebherr-Werk Nenzing GmbH | Procédé de traitement de gestion de puissance d'une fondation sur pilotis dotée d'un engin porteur et d'un appareil isolé monté sur ledit engin porteur |
| EP3564445A1 (fr) | 2018-05-04 | 2019-11-06 | BAUER Spezialtiefbau GmbH | Procédé et dispositif de fabrication d'un élément de mise à la terre dans le sol |
| EP3719246A1 (fr) * | 2019-04-03 | 2020-10-07 | BAUER Maschinen GmbH | Procédé de production d'un forage dans le sol et appareil de forage associé |
| US10837238B2 (en) | 2018-07-19 | 2020-11-17 | Nabors Drilling Technologies Usa, Inc. | Side saddle slingshot continuous motion rig |
| US10865583B2 (en) | 2013-02-13 | 2020-12-15 | Nabors Drilling Technologies Usa, Inc. | Side saddle drilling rigs |
| US11230855B2 (en) | 2016-06-07 | 2022-01-25 | Nabors Drilling Technologies Usa, Inc. | Side saddle slingshot drilling rig |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102018104332A1 (de) * | 2018-02-26 | 2019-08-29 | Liebherr-Werk Nenzing Gmbh | Anbaugerät für Bohr- und/oder Gründungsarbeiten |
| JP7464354B2 (ja) * | 2018-07-03 | 2024-04-09 | 株式会社テノックス | 中掘り工法における杭の支持層到達確認方法 |
| DE202018104624U1 (de) * | 2018-07-06 | 2019-10-08 | Liebherr-Components Biberach Gmbh | Bohrgerät |
| CN109025970A (zh) * | 2018-08-21 | 2018-12-18 | 中国十七冶集团有限公司 | 一种收缩式工程桩入岩控制器及控制方法 |
| US11008849B2 (en) * | 2018-09-05 | 2021-05-18 | Deere & Company | Grade management system for an implement |
| CN109854190B (zh) * | 2019-04-23 | 2024-02-13 | 安徽理工大学 | 用于液压进给结构钻机的钻孔自动计长装置的使用方法 |
| AU2020373299A1 (en) * | 2019-10-30 | 2022-06-02 | Aquirian Technology Pty Ltd | A method and apparatus for drilling and positioning a collar support sleeve into a blast hole |
| CN112240159B (zh) * | 2020-10-09 | 2022-09-02 | 山河智能装备股份有限公司 | 一种预制管桩植入装置及植桩施工方法 |
| CN112780261B (zh) * | 2021-01-18 | 2023-07-07 | 北京三一智造科技有限公司 | 一种长螺旋钻机的测深方法、测深装置及测深设备 |
| FI4080012T3 (fi) | 2021-04-22 | 2024-08-07 | Abi Anlagentechnik Baumaschinen Industriebedarf Maschf Und Vertriebsgesellschaft Mbh | Erikoistuneen maa- ja vesirakennusalan rakennuskone |
| CN113338893A (zh) * | 2021-06-29 | 2021-09-03 | 浙江绩丰物联科技股份有限公司 | 旋挖钻机钻杆工作状态监控预警保护模拟可视系统 |
| EP4409107A1 (fr) * | 2021-09-29 | 2024-08-07 | Aquirian Technology Pty Ltd | Appareil et procédé pour supporter une région de collier d'un trou de mine pendant le forage |
| EP4343066A1 (fr) * | 2022-09-23 | 2024-03-27 | BAUER Maschinen GmbH | Engin de génie civil et procédé de réalisation d'une fondation dans le sol |
| DE202023100984U1 (de) | 2023-03-02 | 2023-03-13 | Bauer Maschinen Gmbh | Baumaschine, insbesondere Tiefbaumaschine |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1548226A1 (fr) | 2003-12-23 | 2005-06-29 | BAUER Maschinen GmbH | Foreuse et procédé pour introduire un élément de forage dans le sol |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5038888B1 (fr) * | 1968-03-07 | 1975-12-12 | ||
| US5082069A (en) | 1990-03-01 | 1992-01-21 | Atlantic Richfield Company | Combination drivepipe/casing and installation method for offshore well |
| US5255751A (en) | 1991-11-07 | 1993-10-26 | Huey Stogner | Oilfield make-up and breakout tool for top drive drilling systems |
| GB9724024D0 (en) | 1997-11-13 | 1998-01-14 | Kvaerner Cementation Found Ltd | Improved piling method |
| US6347292B1 (en) | 1999-02-17 | 2002-02-12 | Den-Con Electronics, Inc. | Oilfield equipment identification method and apparatus |
| US6601658B1 (en) | 1999-11-10 | 2003-08-05 | Schlumberger Wcp Ltd | Control method for use with a steerable drilling system |
| US6826492B2 (en) | 2001-04-23 | 2004-11-30 | Key Energy Services, Inc. | Method of managing a well file record at a well site |
| US7946356B2 (en) | 2004-04-15 | 2011-05-24 | National Oilwell Varco L.P. | Systems and methods for monitored drilling |
| WO2006012186A1 (fr) | 2004-06-24 | 2006-02-02 | Baker Hughes Incorporated | Systèmes de forage et procédés d’utilisation de multiples séquences de tubes déployables séparément |
| GB2424432B (en) | 2005-02-28 | 2010-03-17 | Weatherford Lamb | Deep water drilling with casing |
| CN1944939B (zh) | 2006-11-09 | 2012-09-05 | 山河智能装备股份有限公司 | 分离驱动式套管螺旋钻机及其施工方法 |
| US8857510B2 (en) * | 2009-04-03 | 2014-10-14 | Schlumberger Technology Corporation | System and method for determining movement of a drilling component in a wellbore |
| IT1395776B1 (it) | 2009-08-28 | 2012-10-19 | Soilmec Spa | Sistema elettronico di controllo di dispositivi di perforazione |
| EP3255239A1 (fr) | 2010-04-16 | 2017-12-13 | BAUER Maschinen GmbH | Engin doté d'une unité de calcul pour déterminer une zone de réglage |
| IT1403419B1 (it) | 2010-12-23 | 2013-10-17 | Soilmec Spa | Metodo ed apparato per la perforazione del terreno. |
| BE1020365A4 (nl) | 2012-01-02 | 2013-08-06 | Geosea N V | Inrichting en werkwijze voor het boren van schachten in een uit rots, klei en/of aanverwante materialen bestaande ondergrond. |
| CN102635310B (zh) | 2012-04-11 | 2014-04-16 | 中国石油集团长城钻探工程有限公司 | 油井井下套管钻孔器 |
| ITTO20120405A1 (it) * | 2012-05-07 | 2013-11-08 | Soilmec Spa | Punta di scavo per un'elica di un assieme di scavo di terreno, in particolare per la realizzazione di pali escavati, e procedimento di perforazione che utilizza tale punta. |
| AU2013356921B2 (en) * | 2012-12-10 | 2016-02-11 | Jaron Lyell Mcmillan | Modified stone column drill |
| CN103452475B (zh) | 2013-09-17 | 2015-05-20 | 中煤科工集团西安研究院有限公司 | 一种煤矿井下松软破碎地层套管护孔成孔方法 |
| US10054917B2 (en) * | 2014-12-30 | 2018-08-21 | National Oilwell Varco, L.P. | Drilling direct control user interface |
-
2015
- 2015-04-17 DE DE102015105908.8A patent/DE102015105908B4/de active Active
-
2016
- 2016-01-28 TR TR2018/07098T patent/TR201807098T4/tr unknown
- 2016-01-28 ES ES16153082.9T patent/ES2669509T3/es active Active
- 2016-01-28 EP EP16153082.9A patent/EP3081737B1/fr active Active
- 2016-04-11 US US15/095,796 patent/US10344586B2/en active Active
- 2016-04-15 CN CN201610233393.XA patent/CN106065767B/zh active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1548226A1 (fr) | 2003-12-23 | 2005-06-29 | BAUER Maschinen GmbH | Foreuse et procédé pour introduire un élément de forage dans le sol |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10865583B2 (en) | 2013-02-13 | 2020-12-15 | Nabors Drilling Technologies Usa, Inc. | Side saddle drilling rigs |
| US10364604B2 (en) * | 2015-12-18 | 2019-07-30 | Soilmec S.P.A | Device and method for the movement and mutual assembly of segments of an excavation battery, for example auger or rod segments |
| US11230855B2 (en) | 2016-06-07 | 2022-01-25 | Nabors Drilling Technologies Usa, Inc. | Side saddle slingshot drilling rig |
| EP3530813A1 (fr) * | 2018-02-26 | 2019-08-28 | Liebherr-Werk Nenzing GmbH | Procédé de mesure de profondeur du tubage dans une fondation sur pilotis ainsi qu'appareil rapporté pour la fondation sur pilotis |
| EP3533933A1 (fr) * | 2018-02-26 | 2019-09-04 | Liebherr-Werk Nenzing GmbH | Procédé de traitement de gestion de puissance d'une fondation sur pilotis dotée d'un engin porteur et d'un appareil isolé monté sur ledit engin porteur |
| EP3564445A1 (fr) | 2018-05-04 | 2019-11-06 | BAUER Spezialtiefbau GmbH | Procédé et dispositif de fabrication d'un élément de mise à la terre dans le sol |
| WO2019211029A1 (fr) | 2018-05-04 | 2019-11-07 | Bauer Spezialtiefbau Gmbh | Procédé et dispositif pour construire un élément de fondation dans le sol |
| US11319688B2 (en) | 2018-05-04 | 2022-05-03 | Bauer Spezialtiefbau Gmbh | Method and device for producing a foundation element in the ground |
| US10837238B2 (en) | 2018-07-19 | 2020-11-17 | Nabors Drilling Technologies Usa, Inc. | Side saddle slingshot continuous motion rig |
| EP3719246A1 (fr) * | 2019-04-03 | 2020-10-07 | BAUER Maschinen GmbH | Procédé de production d'un forage dans le sol et appareil de forage associé |
| WO2020200770A1 (fr) * | 2019-04-03 | 2020-10-08 | Bauer Maschinen Gmbh | Procédé pour la création d'un trou de forage dans le sol et appareil de forage à cette fin |
Also Published As
| Publication number | Publication date |
|---|---|
| US10344586B2 (en) | 2019-07-09 |
| ES2669509T3 (es) | 2018-05-28 |
| DE102015105908A1 (de) | 2016-10-20 |
| EP3081737A3 (fr) | 2016-11-02 |
| DE102015105908B4 (de) | 2024-08-01 |
| TR201807098T4 (tr) | 2018-06-21 |
| CN106065767B (zh) | 2018-07-10 |
| CN106065767A (zh) | 2016-11-02 |
| EP3081737B1 (fr) | 2018-03-14 |
| US20160305234A1 (en) | 2016-10-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3081737B1 (fr) | Appareil de forage destine a pratiquer un forage tube et procede de fonctionnement d'un appareil de forage | |
| EP2085566B1 (fr) | Installation de forage | |
| EP2527539B1 (fr) | Agencement de forage sous-marin et procédé d'introduction d'un élément de fondation dans le sol d'une étendue d'eau | |
| DE60305733T2 (de) | Bohren eines bohrlochs | |
| EP2543770B1 (fr) | Dispositif et procédé de mesure de colonnes de sortie de tuyères en sous-sol | |
| EP2505762B1 (fr) | Dispositif de forage et procédé de forage horizontal | |
| WO1990014498A1 (fr) | Procede et dispositif pour obtenir des echantillons d'eau non adulteres lors du forage d'un puits | |
| EP3287588B1 (fr) | Machine de travail et procédé destiné au travail d'un sol | |
| EP3115511A1 (fr) | Procédé de fabrication d'un mur de pieux de perçage superposé | |
| DE60115741T2 (de) | Aushubgerät für die Herstellung von Ortbetonpfählen | |
| DE102011000320A1 (de) | Bohranlage zum Durchführen von Bohrungen im Erdreich | |
| EP2698499B1 (fr) | Procédé et dispositif de fabrication et de mesure d'un trou de forage | |
| EP1942247B1 (fr) | Méthode et dispositif pour forer dans le sol par refoulement | |
| EP3907371B1 (fr) | Machine de travail et procédé de traitement d'un sol | |
| EP3091173A1 (fr) | Installation de forage destinee a produire ou a elargir un forage terrestre dans la terre et procede de commande d'un dispositif d'avance d'une telle installation de forage | |
| EP2246482A1 (fr) | Procédé et dispositif d'établissement d'un élément de fondation à friction partiellement réduite | |
| EP3456914A1 (fr) | Dispositif de forage double tête et procédé de réalisation d'un forage | |
| DE1942857C3 (de) | Erdbohrmaschine zum Herstellen von Bodenschlitzen | |
| DE3326303C2 (de) | Vorrichtung zum Herstellen verrohrter Bohrungen | |
| DE102004042195A1 (de) | Erdbohrsystem | |
| DE19846137A1 (de) | Verfahren und Vorrichtung zum Vermessen eines Bohrlochs | |
| EP3252234B1 (fr) | Procédé et dispositif d'élimination d'un élément de pieu hors d'un sol | |
| DE1161524B (de) | Verfahren und Vorrichtung zur Herstellung von Bohrschaechten und aehnlichen Bohrungen | |
| EP3719246B1 (fr) | Procédé de production d'un forage dans le sol et appareil de forage associé | |
| DE10116103B4 (de) | Vorrichtung zum Auffahren einer unterirdischen Bohrung |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: E21B 7/00 20060101ALI20160923BHEP Ipc: E21B 44/00 20060101ALI20160923BHEP Ipc: E21B 7/20 20060101ALI20160923BHEP Ipc: E02D 7/00 20060101ALI20160923BHEP Ipc: E21B 3/03 20060101AFI20160923BHEP |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20161121 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20170908 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: AT Ref legal event code: REF Ref document number: 979068 Country of ref document: AT Kind code of ref document: T Effective date: 20180315 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502016000677 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: BOGENSBERGER PATENT- AND MARKENBUERO DR. BURKH, LI |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2669509 Country of ref document: ES Kind code of ref document: T3 Effective date: 20180528 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180314 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180314 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180314 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180614 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180314 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180615 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180614 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180314 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180314 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180314 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180314 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180314 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180314 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180314 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180314 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180314 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180314 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180314 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R026 Ref document number: 502016000677 Country of ref document: DE |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180716 |
|
| 26 | Opposition filed |
Opponent name: ABI ANLAGENTECHNIK-BAUMASCHINEN-INDUSTRIEBEDARF MA Effective date: 20181212 |
|
| PLAX | Notice of opposition and request to file observation + time limit sent |
Free format text: ORIGINAL CODE: EPIDOSNOBS2 |
|
| 26 | Opposition filed |
Opponent name: LIEBHERR-WERK NENZING GMBH Effective date: 20181213 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180314 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180314 |
|
| PLBB | Reply of patent proprietor to notice(s) of opposition received |
Free format text: ORIGINAL CODE: EPIDOSNOBS3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180314 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190128 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20190131 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190131 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190128 |
|
| PLCK | Communication despatched that opposition was rejected |
Free format text: ORIGINAL CODE: EPIDOSNREJ1 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180714 |
|
| APBM | Appeal reference recorded |
Free format text: ORIGINAL CODE: EPIDOSNREFNO |
|
| APBP | Date of receipt of notice of appeal recorded |
Free format text: ORIGINAL CODE: EPIDOSNNOA2O |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20160128 |
|
| APAH | Appeal reference modified |
Free format text: ORIGINAL CODE: EPIDOSCREFNO |
|
| APBM | Appeal reference recorded |
Free format text: ORIGINAL CODE: EPIDOSNREFNO |
|
| APBP | Date of receipt of notice of appeal recorded |
Free format text: ORIGINAL CODE: EPIDOSNNOA2O |
|
| APAH | Appeal reference modified |
Free format text: ORIGINAL CODE: EPIDOSCREFNO |
|
| APBQ | Date of receipt of statement of grounds of appeal recorded |
Free format text: ORIGINAL CODE: EPIDOSNNOA3O |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180314 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230510 |
|
| APBU | Appeal procedure closed |
Free format text: ORIGINAL CODE: EPIDOSNNOA9O |
|
| PLAY | Examination report in opposition despatched + time limit |
Free format text: ORIGINAL CODE: EPIDOSNORE2 |
|
| PLBC | Reply to examination report in opposition received |
Free format text: ORIGINAL CODE: EPIDOSNORE3 |
|
| PLAT | Information related to reply to examination report in opposition deleted |
Free format text: ORIGINAL CODE: EPIDOSDORE3 |
|
| PLBC | Reply to examination report in opposition received |
Free format text: ORIGINAL CODE: EPIDOSNORE3 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20240105 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20240202 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20240105 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240104 Year of fee payment: 9 Ref country code: GB Payment date: 20240108 Year of fee payment: 9 Ref country code: CH Payment date: 20240202 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: TR Payment date: 20240115 Year of fee payment: 9 Ref country code: IT Payment date: 20240110 Year of fee payment: 9 Ref country code: FR Payment date: 20240111 Year of fee payment: 9 |