EP2729397B1 - Procédé et dispositif permettant de déplacer une bande de matériau - Google Patents
Procédé et dispositif permettant de déplacer une bande de matériau Download PDFInfo
- Publication number
- EP2729397B1 EP2729397B1 EP12769953.6A EP12769953A EP2729397B1 EP 2729397 B1 EP2729397 B1 EP 2729397B1 EP 12769953 A EP12769953 A EP 12769953A EP 2729397 B1 EP2729397 B1 EP 2729397B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- drive unit
- torque
- power
- acceleration
- conveyor means
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H23/00—Registering, tensioning, smoothing or guiding webs
- B65H23/04—Registering, tensioning, smoothing or guiding webs longitudinally
- B65H23/18—Registering, tensioning, smoothing or guiding webs longitudinally by controlling or regulating the web-advancing mechanism, e.g. mechanism acting on the running web
- B65H23/182—Registering, tensioning, smoothing or guiding webs longitudinally by controlling or regulating the web-advancing mechanism, e.g. mechanism acting on the running web in unwinding mechanisms or in connection with unwinding operations
- B65H23/185—Registering, tensioning, smoothing or guiding webs longitudinally by controlling or regulating the web-advancing mechanism, e.g. mechanism acting on the running web in unwinding mechanisms or in connection with unwinding operations motor-controlled
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H23/00—Registering, tensioning, smoothing or guiding webs
- B65H23/04—Registering, tensioning, smoothing or guiding webs longitudinally
- B65H23/18—Registering, tensioning, smoothing or guiding webs longitudinally by controlling or regulating the web-advancing mechanism, e.g. mechanism acting on the running web
- B65H23/195—Registering, tensioning, smoothing or guiding webs longitudinally by controlling or regulating the web-advancing mechanism, e.g. mechanism acting on the running web in winding mechanisms or in connection with winding operations
- B65H23/198—Registering, tensioning, smoothing or guiding webs longitudinally by controlling or regulating the web-advancing mechanism, e.g. mechanism acting on the running web in winding mechanisms or in connection with winding operations motor-controlled (Controlling electrical drive motors therefor)
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2220/00—Function indicators
- B65H2220/02—Function indicators indicating an entity which is controlled, adjusted or changed by a control process, i.e. output
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2513/00—Dynamic entities; Timing aspects
- B65H2513/20—Acceleration or deceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2515/00—Physical entities not provided for in groups B65H2511/00 or B65H2513/00
- B65H2515/70—Electrical or magnetic properties, e.g. electric power or current
Definitions
- the invention relates to a method for moving a material web with conveying means which can be driven by at least one drive unit.
- the invention relates to a controller and a machine with at least one drive unit and with by the at least one drive unit driven conveyors. Furthermore, the invention relates to a computer program and a computer program product.
- Such a method and such devices are used in particular where machines move through goods webs by means of electrically driven rollers and cylinders.
- These cylinders and rollers especially in paper, foil and steel processing machines, have large mass inertias depending on the amount of wound material, so that the acceleration and deceleration time can be in the range of several minutes.
- This ramp time depends mainly on the factors friction and inertia.
- the inertia is largely dependent on the amount of wound material, especially in winders (winders and unwinders).
- the acceleration and deceleration values have hitherto been set to a value such that the machine is not electrically and mechanically overloaded.
- a programmable controller is known by means of which a calibration between successive winding and unwinding operations of a belt and an automatic generation of a current reference value for a control of a motor of a winding or unwinding roller in real time is made possible.
- the controller includes a Arithmetic unit for determining the roll diameter and a compensation of a deviation of the belt speed and an inertia compensation.
- EP 1 958 905 A2 further describes a method and apparatus for compensating friction in a winding machine. Further, in EP 1 958 905 A2 discloses a control method for friction compensation in a winding machine.
- the invention has for its object to reduce times for accelerating and decelerating a web through existing drives or to use the same time requirements drives with lower power and torque limits.
- the method can be used in particular in paper, foil or steel processing machines, in which continuous webs are moved by means of electrically driven conveying means.
- These conveying means can be designed, for example, as rollers, cylinders, conveyor belts or the like and, together with the material webs moved therewith, can have a high mass inertia.
- the advantage of the method according to the present invention is the ability to quickly change the movement of a web.
- the method allows a torque and power optimal movement. This is also possible if the inertia of the conveyor or the web changes, for example by winding the web on the funding.
- the concept of acceleration becomes positive or negative speed change understood, so that the speed during acceleration can be greater or smaller in amount.
- two cases are distinguished in the acceleration of one web.
- the distinction is based on the fact that, in particular in electric drives at a low speed or speed, the torque is the limiting magnitude of the acceleration. That At low speed or speed, a drive unit can provide comparatively large torque, whereas the power of the drive unit is comparatively low and increases in proportion to the speed. For higher speeds or speeds, however, the power of the drive unit is the limiting amount of acceleration. In this case, the drive unit can provide a comparatively large power, with the torque decreasing for increasing speeds or speeds.
- a torque and a power can now be specified; otherwise, stored values can be used.
- the at least one drive unit requires a certain torque and a certain amount of power.
- the method now provides to accelerate the conveyor with the predetermined torque, if the power required for it is less than the predetermined power. If the torque required for the acceleration is smaller than the predefinable torque, the conveying means are accelerated with the predetermined power. This can lead to short-term overshoots in real drives, during which a greater torque than the predetermined torque or a higher power than the predetermined power is provided.
- the acceleration is accomplished by the drive unit, which corresponding current setpoints are specified.
- the presetting of the current setpoints may be preceded by further steps, such as a specification of desired ramp times, a determination of speed or speed setpoints by means of a ramp function generator, a comparison of said speed setpoint values with the speed setpoints. or actual speed values and, after a torque limitation, a conversion of the predefinable torque and the specifiable power into current setpoint values.
- the method also provides for ending the acceleration process as soon as a desired movement or speed of the material web has been reached. This can be in particular the run-up of the web to a certain speed or the complete stoppage of the web.
- the specifiable power may be a specific percentage of the rated power of the at least one drive unit and the predefinable torque may be, for example, a specific percentage of the rated torque of the at least one drive unit.
- the predefinable torque of the at least one drive unit is the rated torque of the at least one drive unit and the predefinable power is the rated power of the at least one drive unit.
- the use of the rated torque or the rated power of the at least one drive unit thereby allows the fastest possible acceleration of the funding. So are the funds -. B. from standstill - accelerated using the rated torque until the speed or speed is reached, for which the drive unit requires the rated power. From this speed, the acceleration of the conveyor using the Rated power to be continued, wherein the torque is reduced with increasing speed or speed. Finally, the acceleration process is terminated as soon as the desired movement of the web has been reached.
- this acceleration of the material web executed as deceleration is achieved using the rated power of the at least one drive unit, provided that the torque required for this purpose is smaller than the nominal torque.
- the web is braked by the at least one drive unit using the rated power until the required torque is equal in terms of the nominal torque of the at least one drive unit.
- the web is further braked with the nominal torque of the drive unit, wherein the braking power is now smaller than the rated power of at least one drive unit.
- the at least one drive unit may be, for example, of the form that at least one rectifier, which rectifies an AC voltage of the supply network into an intermediate circuit voltage, at least one DC link capacitor and at least one inverter, which inverts the DC link voltage in an AC voltage of variable frequency, are provided. If a rectifier and several inverters are used, the inverters can have a greater total power than the rectifier, so that the power of the at least one drive unit is limited by the rectifier. In this case, the rated power of the at least one drive unit is given by the rated power of the rectifier.
- a check and a feedback of the method can be carried out in such a way that the current setpoint values for the drive unit are corrected and adapted if necessary.
- the actual values of the torque and the power of the at least one drive unit can be determined in particular by a converter which is included in the at least one drive unit.
- the acceleration of the conveyor is performed as a deceleration of the movement of the web and the at least one drive unit is operated as a generator.
- the generator operation of a drive unit of the machine in terms of environmental protection, energy conservation and cost reduction is particularly interesting. Because when braking the funding can their kinetic Energy are fed back through the at least one drive unit in the form of electrical energy in the power grid. Overall, the machine thus consumes less energy, which is synonymous with a cost reduction and improved environmental protection.
- the acceleration of the conveyor is performed as a deceleration of the movement of the web and the movement of the web is additionally braked by means of a brake.
- a brake By using a brake, a greater acceleration of the conveyor can be achieved, resulting in increased productivity of the machine as the time to decelerate the machine can be reduced to a desired motion. Consequently, the cost can be further reduced.
- the conveying means comprise a winding cylinder, which may also be designed as a roller or another device for winding a web.
- the web is wound up or unwound onto the winding cylinder, and since the web itself has a certain thickness, the material wound on the cylinder has a certain thickness of the winding which is detected.
- the torque needed to accelerate the conveyor which is needed to accelerate the conveyor and / or the current setpoints are detected and stored. This can take place, for example, in a control in which the dependence of the variables mentioned on the detected goods winding thickness of the material web wound on the winding cylinder is thus present.
- the stored information can be used when detecting a specific amount of goods roll presently present on the cylinder.
- a learning process takes place, and a machine on which the procedure is applied is characterized by a certain "intelligence". This is particularly advantageous if different types of webs are used, which have different textures, thicknesses or masses and for each of the different webs said dependence is stored separately.
- Said ratio of the required torque with respect to the maximum achievable torque of a drive unit or the corresponding ratio with respect to the powers expresses whether the considered drive unit is able to effect the desired acceleration. If this is not the case and the desired acceleration can not be achieved, then the determined ratio is greater than 1.
- the ratio for each of the drive units is determined . Should one of the determined ratios be greater than 1, the maximum achievable acceleration is determined for that drive unit which has the largest determined ratio and is therefore the most overstretched.
- the funding is accelerated with the determined maximum achievable acceleration. So that means that the drive unit with the largest determined ratio and which is the most overwhelmed, specifies the acceleration of the funding.
- for machines which have several, for example, as cylinders, rollers or the like running means and have several associated drive units, thus ensuring that the moving web over several funding and is moved uniformly by several drive units.
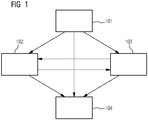
- FIG. 1 shows a flow diagram of the method according to the present invention for moving a web 1.
- a desired movement of the web 1 is compared with the current movement of the web 1. If in this case the actual movement of the material web 1 is equal to the desired movement of the material web 1, then step 104 is carried out in which the process is ended. However, should the actual movement and the desired movement of the material web 1 be different, the material web 1 is accelerated by means of at least one drive unit 2 drivable conveying means 3, 13. For this purpose, two cases are distinguished, for each corresponding current setpoint values 11 are specified to the at least one drive unit 2.
- step 102 the conveying means 3, 13 are accelerated by the at least one drive unit 2 with a predefinable torque 4 if a power required for this purpose is smaller than a predefinable power 5 of the at least one drive unit 2.
- step 103 the conveying means 3, 13 are accelerated by the at least one drive unit 2 with the predetermined power 5, if a torque required for this purpose is smaller than the presettable torque 4 of the at least one drive unit 2. If step 102 or step 103 has been carried out, step 103 or 102 can subsequently be carried out, or the acceleration process is ended in accordance with 104 as soon as a desired movement of material web 1 has been reached.
- FIG. 2 shows an exemplary time profile of the speed 8 of a web 1, an actual torque value 6 and a power actual value 7 according to the method of the present invention.
- the time is plotted and on the ordinate axis with a scale from 0 to 2000, the speed 8 of a web 1.
- On the ordinate axis are still each with a scale from -150 to 150, an actual torque value 6 and a Actual performance value 7 plotted.
- the two latter variables are expressed as relative size in% with respect to the corresponding nominal values of a drive unit 2, wherein the drive unit 2 can accelerate conveying means 3, 13 which move the web 1.
- FIG. 2 not shown and listed here reference numerals see the other figures.
- the conveyor 3, 13 and the web 1 are first accelerated with comparatively low power, but a torque actual value 6 is used, which the rated torque of the drive unit 2 corresponds. For real drives This can lead to short-term overshoots, during which a larger torque or higher power is provided.
- the speed increases 8. Since the power is both proportional to the torque and proportional to the speed 8 and the speed, the actual power value 7 of the drive unit 2 increases with increasing speed. 8
- the nominal power of the drive unit 2 is reached, so that with further increasing speed 8, the actual power value 7 corresponds to the rated power of the drive unit 2 and the actual torque value 6 is reduced with increasing speed 8.
- the acceleration of the web 1 and the conveying means 3, 13 is finally terminated as soon as the desired movement, ie a desired speed 8, has been reached. In order to maintain a certain speed 8, only that power and that torque are needed, which compensate for the friction losses occurring.
- the drive unit 2 In order to decelerate a material web 1 that is in motion, ie to carry out an acceleration counter to the direction of movement, the drive unit 2 first uses the nominal power of the drive unit as the actual power value 7, using a torque actual value 6 which is smaller than the torque value. Nominal value of the drive unit 2.
- the actual power value 7 is kept constant with decreasing speed 8, whereby the torque actual value thereby increases until the torque nominal value of the drive unit 2 is reached.
- the torque actual value 6 is now kept constant equal to the rated torque of the drive unit 2, and the actual power value 7 is reduced with decreasing speed 8.
- FIG. 3 shows a block diagram of a first embodiment of the method according to the present invention.
- Drive units 2 current setpoints 11 are specified by a ramp generator 24.
- the setpoint values can either be transferred directly to all drive units 2 or via a setpoint scale or via a setpoint cascade.
- the ramp-function generator 24 can also be designed as a ramp generator or the like.
- the drives 2 can perform a movement using a respective torque actual value 6 and a respective actual power value 7, which are registered by a ramp adaptation 21.
- a value for the acceleration rate 22 is determined, which is transmitted to the ramp-function generator 24. This in turn generates the current setpoint values 11, which are specified to the drive units 2.
- FIG. 4 shows a block diagram of a first embodiment of the machine according to the present invention.
- a web 1 is moved via a roller 3 to a winding cylinder 13, on which the web 1 is wound up.
- the wound up on the winding cylinder 13 web 1 has a fabric winding thickness 14.
- the roller 3 and the winding cylinder 13 are each driven via a drive shaft 20 which is provided with a brake 12 and is driven by a drive unit 2.
- the respective drive units 2 receive current setpoints 11 from a controller 15 on which a computer program 18 runs during the performance of the method of the present invention.
- FIG. 5 shows an exemplary time profile of a speed of a web of a torque actual value and a power actual value according to the prior art.
- the representation of the actual torque value 6, the actual power value 7 and the speed 8 corresponds to that in FIG. 2 of the present document.
- the actual torque value 6 remains almost constant during the acceleration phase and is less than about half of the nominal torque value of a corresponding drive unit 2.
- the speed 8 is increasing, the actual power value 7 is continuously increased and while the speed 8 decreases, the power actual value continuously decreases.
- the power actual value 7 does not reach the nominal power value of a corresponding drive unit 2 even at high speeds 8.
- there is no torque or power-optimal movement at any time This results in a longer required period of time to achieve the desired movement.
- the invention relates to a method for moving a web 1 with at least one drive unit 2 drivable conveying means 3, 13. Furthermore, the invention relates to a controller 15 and a machine 16 with at least one drive unit 2 and with at least one drive unit 2 drivable conveying means 3rd 13. The invention further relates to a computer program 18 and a computer program product 19.
Landscapes
- Controlling Rewinding, Feeding, Winding, Or Abnormalities Of Webs (AREA)
- Control Of Electric Motors In General (AREA)
Claims (11)
- Procédé pour déplacer une bande (1) de matériau par des moyens (3, 13) de transport pouvant être entraînés par au moins une unité (2) d'entraînement, comprenant les stades de procédé suivants :- on détermine une valeur (6) réelle de couple et une valeur (7) réelle de puissance qu'utilise la au moins une unité (2) d'entraînement pour accélérer les moyens (3, 13) de transport,- on adapte les valeurs (11) de consigne de courant, qui sont prescrites à l'unité (2) d'entraînement, si la valeur (6) réelle de couple, qui a été déterminée, est plus petite en valeur absolue que le couple (4) pouvant être donné à l'avance ou si la valeur (7) réelle de puissance, qui a été déterminée, est plus petite que la puissance (5) pouvant être donnée à l'avance,- on prescrit des valeurs (11) de consigne de courant à la au moins une unité (2) d'entraînement, de manière- à accélérer les moyens (3, 13) de transport par la au moins une unité (2) d'entraînement à un couple (4) pouvant être donné à l'avance, si une puissance nécessaire à cet effet est plus petite qu'une puissance (5) pouvant été donnée à l'avance de la au moins une unité (2) d'entraînement,- à accélérer les moyens (3, 13) de transport par la au moins une unité (2) d'entraînement à la puissance (5) donnée à l'avance, si un couple nécessaire à cet effet, est, en valeur absolue, plus petit que le couple (4) pouvant être donné à l'avance de la au moins une unité (2) d'entraînement,- on met fin à l'opération d'accélération, dès qu'un déplacement souhaité de la bande (1) de matériau a été atteint.
- Procédé suivant la revendication 1, dans lequel- le couple (4) pouvant être donné à l'avance de la au moins une unité (2) d'entraînement est le couple nominal de la au moins une unité (2) d'entraînement et- la puissance (5) pouvant être donnée à l'avance de la au moins une unité (2) d'entraînement est la puissance nominale de la au moins une unité (2) d'entraînement.
- Procédé suivant l'une des revendications précédentes, dans lequel- on réalise l'accélération des moyens (3, 13) de transport sous la forme d'un freinage du déplacement de la bande (1) de matériau et- on fait fonctionner la au moins une unité (2) d'entraînement en génératrice.
- Procédé suivant l'une des revendications précédentes, dans lequel- on réalise l'accélération des moyens (3, 13) de transport sous la forme d'un freinage du déplacement de la bande (1) de matériau et- on freine le déplacement de la bande (1) de matériau supplémentairement au moyen d'un frein (12).
- Procédé suivant l'une des revendications précédentes, comprenant les autres stades de procédé suivants :- on déroule et on enroule la bande (1) de matériau d'un ou sur un cylindre (13) d'enroulement, qui est compris par les moyens (3, 13) de transport et qui peut être entraîné par la au moins une unité (2) d'entraînement,- on détecte une épaisseur (14) d'enroulement de matériau de la bande (1) de matériau enroulée sur le cylindre (13) d'enroulement,- on met le couple nécessaire à l'accélération des moyens (3, 13) de transport, la puissance nécessaire pour accélérer les moyens (3, 13) de transport et/ou les valeurs (11) de consigne de courant en mémoire en fonction de l'épaisseur (14) de l'enroulement de matériau qui a été détectée.
- Procédé suivant la revendication 5, comprenant les autres stades de procédé suivants :- on détecte l'épaisseur (14) de l'enroulement de matériau de la bande (1) de matériau enroulée sur le cylindre (13) d'enroulement,- on utilise la dépendance mise en mémoire du couple nécessaire à l'accélération des moyens (3, 13) de transport, de la puissance nécessaire à l'accélération des moyens (3, 13) de transport et/ou des valeurs (11) de consigne de courant à l'épaisseur de l'enroulement de matériau, qui a été détectée, pour accélérer les moyens (3, 13) de transport jusqu'au déplacement souhaité de la bande (1) de matériau.
- Procédé suivant l'une des revendications précédentes comprenant les autres stades de procédé suivants :- on détermine le rapport du couple ou de la puissance pour chaque unité (2) d'entraînement, qui est nécessaire pour une accélération souhaitée, par rapport au couple ou à la puissance que l'unité (2) d'entraînement respective peut mettre à disposition au maximum,- si le rapport déterminé pour au moins une unité (2) d'entraînement est plus grand que 1 :- on détermine une accélération pouvant être réalisée au maximum de chaque unité (2) d'entraînement ayant le rapport déterminé le plus grand et- on accélère les moyens (3, 13) de transport à l'accélération pouvant être réalisée au maximum qui a été déterminé.
- Commande (15) d'une machine (16) ayant au moins une unité (2) d'entraînement et des moyens (3, 13) de transport pouvant être entraînés par la au moins une unité (2) d'entraînement,
dans laquelle la commande (15) a des moyens (17) pour effectuer un procédé suivant l'une des revendications 1 à 7. - Machine (16) comprenant- au moins une unité (2) d'entraînement,- des moyens (3, 13) de transport pouvant être entraînés par la au moins une unité (2) d'entraînement et- une commande (15), constituée suivant la revendication 8.
- Programme (18) d'ordinateur pour effectuer un procédé suivant l'une des revendications 1 à 7, lorsqu'il se déroule dans une commande (15) suivant la revendication 8.
- Produit (19) de programme d'ordinateur, sur lequel un programme (18) d'ordinateur suivant la revendication 10 est mis en mémoire.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102011083574A DE102011083574A1 (de) | 2011-09-28 | 2011-09-28 | Verfahren und Vorrichtung zum Bewegen einer Warenbahn |
| PCT/EP2012/067285 WO2013045239A1 (fr) | 2011-09-28 | 2012-09-05 | Procédé et dispositif permettant de déplacer une bande de matériau |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP2729397A1 EP2729397A1 (fr) | 2014-05-14 |
| EP2729397B1 true EP2729397B1 (fr) | 2019-05-01 |
| EP2729397B2 EP2729397B2 (fr) | 2023-06-07 |
Family
ID=47008483
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP12769953.6A Active EP2729397B2 (fr) | 2011-09-28 | 2012-09-05 | Procédé et dispositif permettant de déplacer une bande de matériau |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP2729397B2 (fr) |
| CN (1) | CN103842276B (fr) |
| DE (1) | DE102011083574A1 (fr) |
| ES (1) | ES2739624T3 (fr) |
| FI (1) | FI2729397T4 (fr) |
| WO (1) | WO2013045239A1 (fr) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015113562A1 (fr) * | 2014-02-03 | 2015-08-06 | González-Villar Juan Carlos | Système d'entraînement destiné à des dispositifs de transport, d'extrusion, de poussée, de traction, à des applications de synchronisation et à des enrouleurs axiaux |
| EP3173887A1 (fr) * | 2015-11-24 | 2017-05-31 | Siemens Aktiengesellschaft | Procédé de déplacement d'un entraînement linéaire, entraînement linéaire et machine d'emballage ou de production |
| DE102019127838A1 (de) * | 2019-10-15 | 2021-04-15 | Reifenhäuser GmbH & Co. KG Maschinenfabrik | Verfahren zum Umwickeln einer aufgerollten Warenbahn und Umwickelvorrichtung |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1958905A2 (fr) * | 2007-02-17 | 2008-08-20 | Robert Bosch GmbH | Procédé et dispositif destinés à la compensation de friction |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE1189182B (de) * | 1961-08-15 | 1965-03-18 | Licentia Gmbh | Insbesondere fuer ein Bandwalzwerk vorgesehener Mehrmotorenantrieb |
| US3725755A (en) * | 1969-11-27 | 1973-04-03 | Vanguard | Systems for driving reels at controlled speed and power and improved apparatus for effecting such driving |
| US4519039A (en) * | 1982-07-23 | 1985-05-21 | Westinghouse Electric Corp. | Digital coil diameter function generator and reel motor drive system embodying the same |
| DE3731214A1 (de) * | 1987-09-17 | 1989-03-30 | Koenig & Bauer Ag | Vorrichtung fuer das gesteuerte zufuehren von bandmaterial zu druckmaschinen, sowie ein verfahren und eine vorrichtung zur durchfuehrung des verfahrens zur regelung eines entsprechenden steuersignals |
| JP2598968B2 (ja) * | 1988-06-13 | 1997-04-09 | 津田駒工業株式会社 | 巻取機械の制御装置 |
| JP3526372B2 (ja) * | 1996-06-13 | 2004-05-10 | 富士電機システムズ株式会社 | 巻取設備の制御方法 |
| DE102004004759B4 (de) * | 2004-01-30 | 2006-03-09 | Koenig & Bauer Ag | Antrieb für einen Rollenwechsler |
| FI120432B (fi) | 2007-02-05 | 2009-10-15 | Abb Oy | Menetelmä sähkökäytön ohjaamiseksi |
| FI125653B (fi) * | 2008-09-29 | 2015-12-31 | Valmet Technologies Inc | Kuiturainakoneen osan ja/tai laitteen sähkökäyttöjärjestely ja menetelmä kuiturainakoneen osan ja/tai laitteen sähkökäyttöjärjestelyn ohjaamiseksi |
| FI122609B (fi) | 2009-01-12 | 2012-04-13 | Abb Oy | Menetelmä, laitteisto ja tietokoneohjelmatuote aukirullaimen yhteydessä |
-
2011
- 2011-09-28 DE DE102011083574A patent/DE102011083574A1/de not_active Ceased
-
2012
- 2012-09-05 ES ES12769953T patent/ES2739624T3/es active Active
- 2012-09-05 EP EP12769953.6A patent/EP2729397B2/fr active Active
- 2012-09-05 CN CN201280047420.4A patent/CN103842276B/zh active Active
- 2012-09-05 WO PCT/EP2012/067285 patent/WO2013045239A1/fr not_active Ceased
- 2012-09-05 FI FIEP12769953.6T patent/FI2729397T4/de active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1958905A2 (fr) * | 2007-02-17 | 2008-08-20 | Robert Bosch GmbH | Procédé et dispositif destinés à la compensation de friction |
| DE102007007988A1 (de) * | 2007-02-17 | 2008-08-28 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Reibkompensation |
Non-Patent Citations (1)
| Title |
|---|
| "ENTWURF ÜBERLAGERTER REGLER", 1 January 2010, HOCHDYNAMISCHE REGELUNG ELEKTRISCHER ANTRIEBE, VDE-VERLAG, PAGE(S) 284-297,393, ISBN: 978-3-8007-3218-0, XP003035158 * |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102011083574A1 (de) | 2013-03-28 |
| FI2729397T4 (en) | 2024-01-29 |
| EP2729397A1 (fr) | 2014-05-14 |
| CN103842276A (zh) | 2014-06-04 |
| CN103842276B (zh) | 2016-03-09 |
| WO2013045239A1 (fr) | 2013-04-04 |
| EP2729397B2 (fr) | 2023-06-07 |
| ES2739624T3 (es) | 2020-02-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE112011100347B4 (de) | Motorsteuervorrichtung | |
| EP2428480B1 (fr) | Procédé de fonctionnement d'une machine textile fabriquant des bobines croisées et machine textile fabriquant des bobines croisées | |
| DE10024120A1 (de) | Rollenwechsler mit Motorbremse | |
| DE3412060A1 (de) | Einrichtung zum betreiben einer spinnerei- oder zwirnereimaschine | |
| DE3336945A1 (de) | Aufzuganlage | |
| EP2729397B1 (fr) | Procédé et dispositif permettant de déplacer une bande de matériau | |
| EP1820963A2 (fr) | Procédé de commande d'une éolienne | |
| EP3102988B1 (fr) | Système d'entraînement destiné à des dispositifs de transport, d'extrusion, de poussée, de traction, à des applications de synchronisation et à des enrouleurs axiaux | |
| EP1916416A2 (fr) | Procédé de fonctionnement d'une éolienne | |
| DE3883685T2 (de) | Spinnmaschine. | |
| DE102012100928B4 (de) | Motoransteuerungs-Regelvorrichtung, die die Leistungsabgabe eines Motors abhängig von dem Lieferverhalten einer Wechselstromversorgung einstellt | |
| DE4126392C1 (en) | Appts. for spooling up fibres, preventing slippage and power fluctuations - includes controlling spooling speed by regulating spool spindle revolutions acccording to contact roller speed | |
| EP3838652B1 (fr) | Système d'entraînement pour un véhicule, procédé de fonctionnement d'entraînement ainsi que véhicule pourvu d'un système d'entraînement | |
| EP0469177A1 (fr) | Procédé et dispositif pour le redémarrage d'un moteur à induction | |
| EP0061646B1 (fr) | Dispositif d'arrêt pour une commande électrique d'un arbre de démarrage d'une bobine comme un moteur à courant alternatif triphasé à vitesse variable | |
| DE4404243A1 (de) | Verfahren und Einrichtung zum Betreiben einer Offenend-Rotorspinneinheit mit einzelmotorischem elektrischem Antrieb des Spinnrotors | |
| CH686680A5 (de) | Regeleinrichtung fuer den Vorschub von Wickelgut einer Webmaschine. | |
| DE102014001249A1 (de) | Antriebssystem für Zentrumswickler | |
| EP3830945B2 (fr) | Dispositif de transport à courroie ainsi que procédé d'arrêt d'une courroie d'un dispositif de transport à courroie | |
| CH677939A5 (fr) | ||
| EP2273000B1 (fr) | Poste de travail d'un métier à tisser à rotor à extrémité ouverte et procédé de fonctionnement du poste de travail | |
| EP3895301A1 (fr) | Dispositif équipé d'un moteur électrique pour la mise à disposition de matériau d'emballage et procédé pour faire fonctionner un dispositif de mise à disposition de matériau d'emballage | |
| DE3040105C2 (de) | Verfahren zur Regelung der Drehzahl eines an einen Zwischenkreis-Umrichter angeschlossenen Drehstrom-Asynchronmotors und Vorrichtung zur Durchführung des Verfahrens | |
| DE102013224324A1 (de) | Verfahren zum Betrieb einer Bahnbearbeitungsmaschine mit fliegendem Rollenwechsel | |
| EP2911259A1 (fr) | Utilisation d'un entraînement à régime régulé pour la stabilisation du réseau |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20140210 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| TPAC | Observations filed by third parties |
Free format text: ORIGINAL CODE: EPIDOSNTIPA |
|
| DAX | Request for extension of the european patent (deleted) | ||
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: SIEMENS AKTIENGESELLSCHAFT |
|
| 17Q | First examination report despatched |
Effective date: 20170824 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20181212 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: AT Ref legal event code: REF Ref document number: 1126653 Country of ref document: AT Kind code of ref document: T Effective date: 20190515 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502012014701 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20190501 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190501 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190901 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190801 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190501 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190501 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190501 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190501 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190801 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190501 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190802 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190901 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R026 Ref document number: 502012014701 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190501 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190501 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190501 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190501 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190501 |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2739624 Country of ref document: ES Kind code of ref document: T3 Effective date: 20200203 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190501 |
|
| PLAX | Notice of opposition and request to file observation + time limit sent |
Free format text: ORIGINAL CODE: EPIDOSNOBS2 |
|
| REG | Reference to a national code |
Ref country code: FI Ref legal event code: MDE Opponent name: VOITH PATENT GMBH |
|
| 26 | Opposition filed |
Opponent name: VOITH PATENT GMBH Effective date: 20200130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190501 |
|
| TPAC | Observations filed by third parties |
Free format text: ORIGINAL CODE: EPIDOSNTIPA |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190501 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190501 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190501 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PLBB | Reply of patent proprietor to notice(s) of opposition received |
Free format text: ORIGINAL CODE: EPIDOSNOBS3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190930 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190905 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190905 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190930 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20190930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190930 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20190905 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190905 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R081 Ref document number: 502012014701 Country of ref document: DE Owner name: SIEMENS ENERGY GLOBAL GMBH & CO. KG, DE Free format text: FORMER OWNER: SIEMENS AKTIENGESELLSCHAFT, 80333 MUENCHEN, DE |
|
| RAP2 | Party data changed (patent owner data changed or rights of a patent transferred) |
Owner name: SIEMENS ENERGY GLOBAL GMBH & CO. KG |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190501 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190501 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20120905 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190501 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: PC Ref document number: 1126653 Country of ref document: AT Kind code of ref document: T Owner name: SIEMENS ENERGY GLOBAL GMBH & CO. KG, DE Effective date: 20221018 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20221219 Year of fee payment: 11 |
|
| PUAH | Patent maintained in amended form |
Free format text: ORIGINAL CODE: 0009272 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: PATENT MAINTAINED AS AMENDED |
|
| 27A | Patent maintained in amended form |
Effective date: 20230607 |
|
| AK | Designated contracting states |
Kind code of ref document: B2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R102 Ref document number: 502012014701 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230607 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: NAV |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: RE72 Free format text: PRV HAR I BESLUT DEN 24 MAJ 2024 FOERKLARAT OEVERSAETTNING OCH AVGIFT FOER PUBLICERING MOTTAGNA I TID FOER EP 12769953.6 (2729397) I AENDRAD AVFATTNING. PATENTET HAR DAERMED FORTFARANDE VERKAN I SVERIGE. Effective date: 20240524 Ref country code: SE Ref legal event code: RPEO |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20240925 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20240924 Year of fee payment: 13 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20250425 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230906 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FI Payment date: 20250925 Year of fee payment: 14 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250926 Year of fee payment: 14 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20250917 Year of fee payment: 14 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20250924 Year of fee payment: 14 |