EP2005997B1 - Trainingsmaschine - Google Patents
Trainingsmaschine Download PDFInfo
- Publication number
- EP2005997B1 EP2005997B1 EP08011100A EP08011100A EP2005997B1 EP 2005997 B1 EP2005997 B1 EP 2005997B1 EP 08011100 A EP08011100 A EP 08011100A EP 08011100 A EP08011100 A EP 08011100A EP 2005997 B1 EP2005997 B1 EP 2005997B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- foot
- training machine
- training
- movement axis
- machine according
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B23/00—Exercising apparatus specially adapted for particular parts of the body
- A63B23/035—Exercising apparatus specially adapted for particular parts of the body for limbs, i.e. upper or lower limbs, e.g. simultaneously
- A63B23/04—Exercising apparatus specially adapted for particular parts of the body for limbs, i.e. upper or lower limbs, e.g. simultaneously for lower limbs
- A63B23/08—Exercising apparatus specially adapted for particular parts of the body for limbs, i.e. upper or lower limbs, e.g. simultaneously for lower limbs for ankle joints
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/008—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices using hydraulic or pneumatic force-resisters
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/02—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices using resilient force-resisters
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/06—User-manipulated weights
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2208/00—Characteristics or parameters related to the user or player
- A63B2208/02—Characteristics or parameters related to the user or player posture
- A63B2208/0204—Standing on the feet
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2225/00—Miscellaneous features of sport apparatus, devices or equipment
- A63B2225/09—Adjustable dimensions
Definitions
- the present invention relates to a training machine, in particular for strength training, coordination training and / or endurance training, preferably for training or for strengthening the skeletal muscle, according to the preamble of claim 1.
- Apparative muscle training has established itself both in movement therapy with regard to the prevention and rehabilitation of injuries, as well as in top and popular sports to increase performance and well-being. It is known that with increased muscle power and improved neuromuscular control, the stabilization of increasingly stressed joints can be improved.
- exercise machines the function of which takes into account the mechanical properties of the respective joint and the musculature to be trained, makes sense.
- Today's training machines have axes of movement that correspond to the so-called cardinal axes of the anatomy books, so starting from the upright person only in one of the following three directions: vertically, in the direction (horizontal) or transverse to the direction (horizontal).
- the US 4,650,183 A describes a training machine according to the preamble of claim 1, which is designed for measuring and / or training the pronation and supination movements of the ankle about a movement axis, which at least substantially corresponds to the anatomical / functional joint axis of the ankle.
- the present invention has for its object to provide a training machine for training the ankle, which allows a more optimal training.
- the foot or foot receptacle in the direction at least substantially perpendicular to the projection of the movement axis in the cancelleddes Foot or a support plane of the foot receptacle during pivoting of the foot receptacle is displaceable about the movement axis. This allows a better workout.
- such a superimposed translational movement of the ankle or translational displacement of the joint axis of the current joint can be taken into account during pronation and supination movements of the foot.
- a basic idea of the present invention is not to align at least one movement axis of the exercise machine on one of the cardinal axes, but to adapt to at least one anatomically-functional joint axis.
- the present invention relates to the training of the foot or ankle, namely the complex of the ankle, hereafter called ankle for short.
- the upper and lower ankle act as a coupled system, such as a slanted hinge joint, to follow the pronation and supination movements of the foot.
- the proposed training machine preferably at least one movement axis is provided according to claim 7.
- the exercise machine is designed such that the movement axis is individually adaptable to the anatomy of the exerciser. For this purpose, the movement axis is adjusted accordingly.
- a training machine based on anatomically functional and biomechanical knowledge has great advantages over conventional exercise machines. Any muscle that connects two bones can move or stabilize a joint together with its antagonist. The muscle controls the joint movement around the anatomical-functional joint axis. The consequence of this is that a training of this muscle with the aim of increasing performance as possible should take place in its functional level, which dictates the axis of the joint. Only in this way can the mechanical properties of the muscle and the biomechanics of the corresponding joint be taken into account during its training. With regard to the prophylaxis of sports injuries, the proposed training machine represents a significant step forward.
- the present invention not only benefits patients for the rehabilitation of injuries, but also athletes in general for prophylactic training of the muscles and joints.
- the invention can basically be used for all types of exercise machines, in particular for strength training machines.
- exercise machine is to be understood in a broad sense as embracing any type of exerciser.
- Fig. 1 shows a schematic representation of a proposed training machine 1 in the context of the present invention.
- the exercise machine 1 is designed to train the ankle 2 of a foot 3.
- the training machine 1 has at least one movement axis 4, which at least substantially corresponds to the anatomical or functional joint axis of a human joint-in this case the ankle 2 -and / or deviates from the coordinate axes mentioned at the outset.
- the movement axis 4 is in Fig. 1 indicated by dash-dotted lines.
- the plan view or, in accordance with the substantially horizontal section Fig. 2 shows the movement axis 4 also.
- the movement axis 4 in the exercise machine 1 runs in the illustrated embodiment preferably at least substantially at an angle ⁇ of about 42 ° +/- 9 ° inclined to the sole of the foot 5, particularly preferably in the direction of upward, as in Fig. 1 indicated.
- the movement axis 4 is alternatively or in addition to the main plane H of the foot 3 in the direction of at least substantially ⁇ by the angle ⁇ of about 23 ° +/- 10 ° inclined inwards, the main plane H of the foot 3 vertically or perpendicular to the sole of the foot 5 and in running direction ( Fig. 2 ).
- the exercise machine 1 has a foot receptacle 6 for receiving the foot 3, in particular the sole of the foot 5.
- the foot receptacle 6 is in particular plate-like, rigid, sole-like and / or formed like a shoe.
- the foot receptacle 6 has a heel receiver 7 and a holder 8 for the forefoot region, in particular in the region of the toe ankle, for example a preferably adjustable band.
- the exercise machine 1 preferably has a hinge 9, which theticianauf acquisition 6 about the movement axis 4 rotatable or pivotable, in particular on a frame G, superimposed.
- the movement axis 4 is preferably defined by the hinge 9.
- the movement axis 4 preferably runs through the ankle joint 2.
- the exercise machine 1 preferably has suitable adjustment devices.
- the heel holder 7 and / or holder 8 may be adjustable so that the foot 3 in the longitudinal direction (running direction) is displaceable or adjustable.
- the already mentioned inclination of the movement axis 4 can be adjustable, for example, by means of corresponding transverse joints between the joint 9 and the foot receptacle 6 or in another suitable manner.
- the exercise machine 1 preferably has a receptacle or holder 10 for the foot 3 associated lower leg 11.
- the receptacle 10 may, for example, a pad 12 and an associated band 13, such as a Velcro, or the like, to allow a secure fixation of the lower leg 11.
- the receptacle 10 is formed such that the lower leg 11 in the region of the knee 14 or immediately below it is fixable.
- the receptacle 10 is then adjustable, in particular in height or relative to the foot receptacle 6 or on the frame G.
- the respective movement about the movement axis 4 can take place against a particularly static, dynamic and / or adjustable force.
- the force acts in the return direction.
- a force only when moving - for example, in the manner of a frictional force - occur.
- the force can also vary away or angle-dependent and / or vary depending on the direction of movement.
- the exercise machine 1 has a device 15 for generating a corresponding force, in particular a restoring force.
- the device 15 causes a provision of the foot 6 in a neutral, for example, at least substantially horizontal position.
- the device 15 in the illustration example, has a pivoting lever 16, which acts on the joint 9 or on the foot receptacle 6, with an associated spring 17.
- a pivoting lever 16 which acts on the joint 9 or on the foot receptacle 6, with an associated spring 17.
- the training machine 1 has in particular only one movement axis 4. However, it is also possible to superimpose several axes of motion and / or to allow more complex movements.
- the foot 3 or the foot receptacle 6 - at least with a movement component - in a direction according to the double arrow 19 in Fig. 2 in the foot plane (plane of the sole of the foot 5 or plate or main plane of the foot 6) displaceable.
- the displacement direction 19 extends in the foot plane and substantially perpendicular (+/- 10 degrees) to the projection of the movement axis 4 in the foot plane.
- the proposed displaceability is possible, for example, by a corresponding carriage-like guide, guide in slots, not shown, guide means of roller rails, a telescopic guide or the like.
- the foot receptacle 6 is correspondingly displaceable in the displacement direction 19 of a in Fig. 1 indicated carrier 21 or the like, for example, connected to the hinge 9 and is pivotable about the movement axis 4, stored or held.
- the heel holder 7 and / or holder 8 for adaptation to the respective foot 3, in particular its size, adjustable or: adjustable.
- the displacement in the displacement direction 19 is free.
- the lower leg 11 is preferably additionally fixed by an additional receptacle 20, in particular in the region of the lower end or adjacent to the ankle 2, as in FIG Fig. 1 indicated.
- the two receptacles 10, 20 are preferably spaced from each other and / or offset in the longitudinal extent of the lower leg 11. So a secure fixation of the lower leg 11 is possible.
- the holder 10 and / or the holder 20 such that the lower leg 11 and / or the knee 14 is pressed only from the front or from the back against a corresponding pad 12 or the like.
- the pad 12 in the region of the receptacle 10 and a further pad, not shown, in the region of the receptacle 20 on opposite sides of the lower leg 11 are arranged.
- the foot 3 or the foot receptacle 6 can also be displaced positively guided or be coupled in their displacement with the pivoting about the movement axis 4. In particular, this can be done via a not shown gear, a Bowden cable or the like.
- the pivoting of the foot receptacle 6 about the movement axis 4 and / or the displacement in the displacement direction 19 can also take place via an optionally common drive or via separate drives.
- the proposed training machine 1 allows a particularly effective and anatomically correct training of the ankle 2.
- FIGS. 3 to 5 show a second embodiment of the proposed training machine 1.
- the second Ausrumbleungsform corresponds in function to at least substantially the first embodiment.
- the same or similar parts are provided with the same reference numerals, the previous versions and explanations apply correspondingly or in addition.
- FIG. 3 shows the exercise machine 1 according to the second embodiment without foot or leg.
- the heel holder or cap 7 is here preferably both forward and backward and right and left adjustable.
- the device 15 is designed differently in the second embodiment.
- an elastic element 18 is provided, which preferably engages in the region of the front foot on the foot receptacle 6 and in particular is mounted against the frame G.
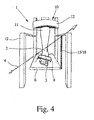
- FIG. 4 shows the exercise machine 1 with recorded foot 3 and fixed lower leg eleventh
- the lower leg receptacle 10 and / or the foot receptacle 6 is height-adjustable
- FIG. 5 shows the exercise machine with recorded foot 3 from behind.
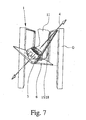
- FIG. 6 shows in a fragmentary schematic representation of the foot 3 in a neutral position of the ankle 2.
- FIG. 7 shows in one too FIG. 6 Corresponding representation of the pron elected, externally raised foot 3. The foot 3 is thus raised about the axis of movement 4 in the ankle 2 upwards.
- the foot 3 or the foot receptacle 6, in particular the heel seat 7 also in crizosis - ie in the direction of the axis H in Fig. 2 be adjustable.
Landscapes
- Health & Medical Sciences (AREA)
- Orthopedic Medicine & Surgery (AREA)
- General Health & Medical Sciences (AREA)
- Physical Education & Sports Medicine (AREA)
- Rehabilitation Tools (AREA)
- Orthopedics, Nursing, And Contraception (AREA)
- Control Of Multiple Motors (AREA)
- Eye Examination Apparatus (AREA)
- Centrifugal Separators (AREA)
Description
- Die vorliegende Erfindung betrifft eine Trainingsmaschine, insbesondere zum Krafttraining, Koordinationstraining und/oder Ausdauertraining, vorzugsweise zum Training bzw. zur Stärkung der Skelettmuskulatur, gemäß dem Oberbegriff des Anspruchs 1.
- Apparatives Muskeltraining hat sich sowohl in der Bewegungstherapie hinsichtlich der Prävention und Rehabilitation von Verletzungen, wie auch im Spitzenund Breitensport zur Steigerung der Leistung und des Wohlbefindens etabliert. Es ist bekannt, daß mit gesteigerter Muskelkraft und verbesserter neuromuskulärer Kontrolle die Stabilisation von vermehrt beanspruchten Gelenken verbessert werden kann. Um ein Muskeltraining zu optimieren, ist der Einsatz von Trainingsmaschinen, deren Funktion die mechanischen Eigenschaften des betreffenden Gelenks und der zu trainierenden Muskulatur berücksichtigt, sinnvoll. Heutige Trainingsmaschinen weisen Bewegungsachsen auf, die den sogenannten Kardinalachsen der Anatomiebücher entsprechen, also ausgehend vom aufrecht stehenden Menschen nur in eine der drei folgenden Richtungen verlaufen: vertikal, in die Laufrichtung (horizontal) oder quer zur Laufrichtung (horizontal).
- Die
US 4,650,183 A beschreibt eine Trainingsmaschine gemäß dem Oberbegriff des Anspruch 1, die zum Messen und/oder Trainieren der Pronations- und Supinationsbewegungen des Sprunggelenkes um eine Bewegungsachse ausgebildet ist, die der anatomisch/funktionellen Gelenkachse des Sprunggelenks zumindest im wesentlichen entspricht. - Der vorliegenden Erfindung liegt die Aufgabe zugrunde, eine Trainingsmaschine zum Training des Sprunggelenks anzugeben, die ein optimaleres Training ermöglicht.
- Die obige Erfindung wird durch eine Trainingsmaschine gemäß Anspruch 1 gelöst. Vorteilhafte Weiterbildungen sind Gegenstand der Unteransprüche.
- Vorschlagsgemäß ist vorgesehen, daß der Fuß oder die Fußaufnahme in Richtung zumindest im wesentlichen senkrecht zur Projektion der Bewegungsachse in die Fußdes Fußes bzw. einer Auflageebene der Fußaufnahme während des Schwenkens der Fußaufnahme um die Bewegungsachse verschiebbar ist. Dies ermöglicht ein optimaleres Training. Insbesondere kann so eine überlagerte translatorische Bewegung des Sprunggelenks bzw. translatorische Verschiebung der Gelenkachse des Stromgelenks bei Pronations- und Supinationsbewegungen des Fußes berücksichtigt werden bzw. erfolgen.
- Eine grundlegende Idee der vorliegenden Erfindung liegt darin, mindestens eine Bewegungsachse der Trainingsmaschine nicht auf eine der Kardinalachsen auszurichten, sondern an mindestens eine anatomisch-funktionelle Gelenkachse anzupassen.
- Die vorliegende Erfindung bezieht sich auf das Training des Fußes bzw. eines Fußgelenks, nämlich des Komplexes des Sprunggelenks, nachfolgend kurz Sprunggelenk genannt. Bei mechanischen Belastungen wirken das obere und untere Sprunggelenk als gekoppeltes System, wie ein schräges Scharniergelenk, um den Pronations- und Supinationsbewegungen des Fußes zu folgen. Bei der vorschlagsgemäßen Trainingsmaschine ist vorzugsweise mindestens eine Bewegungsachse gemäß Anspruch 7 vorgesehen.
- Ein weiterer Aspekt besteht darin, daß die Trainingsmaschine derart ausgebildet ist, daß die Bewegungsachse individuell an die Anatomie des Trainierenden anpaßbar ist. Hierzu ist die Bewegungsachse entsprechend einstellbar.
- Aus sportmedizinischer Perspektive besitzt eine Trainingsmaschine, die auf anatomisch funktionellen und biomechanischen Kenntnissen beruht, große Vorteile gegenüber herkömmlichen Trainingsmaschinen, Jeder Muskel, der zwei Knochen miteinander verbindet, kann ein Gelenk bewegen oder dieses zusammen mit seinem Antagonisten stabilisieren. Dabei kontrolliert der Muskel die Gelenkbewegung um die anatomisch-funktionelle Gelenkachse. Die Konsequenz daraus ist, daß ein Training dieses Muskels mit dem Ziel der Leistungssteigerung möglichst in seiner Funktionsebene, die ihm die Gelenkachse vorgibt, stattfinden sollte. Nur so können die mechanischen Eigenschaften des Muskels und die Biomechanik des entsprechenden Gelenks bei dessen Training berücksichtigt werden. Hinsichtlich der Prophylaxe von Sportverletzungen stellt die vorschlagsgemäße Trainingsmaschine also einen deutlichen Fortschritt dar.
- Des weiteren wird durch die Erfindung die Effizienz des Trainings wesentlich verbessert.
- Von der vorliegenden Erfindung können nicht nur Patienten zur Rehabilitation von Verletzungen, sondern generell auch Sportler zum prophylaktischen Training der Muskulatur und Gelenke, profitieren.
- Die Erfindung ist grundsätzlich für alle Arten von Trainingsmaschinen einsetzbar, insbesondere für Krafttrainingsmaschinen.
- Der Begriff "Trainingsmaschine" ist in einem weiten Sinn dahingehend zu verstehen, daß er jede Art von Trainingsgerät umfaßt.
- Weitere Vorteile, Aspekte, Eigenschaften und Merkmale der vorliegen Erfindung ergeben sich aus den Ansprüchen und der folgenden Beschreibung bevorzugter Ausführungsformen anhand der Zeichnung. Es zeigt:
- Fig. 1
- eine schematische Seitenansicht einer vorschlagsgemäßen Trainingsmaschine gemäß einer ersten Ausführungsform;
- Fig. 2
- eine schematische Draufsicht der Trainingsmaschine gemäß
Fig. 1 ; - Fig. 3
- eine Vorderansicht einer vorschlagsgemäßen Trainingsmaschine gemäß einer zweiten Ausführungsform;
- Fig. 4
- eine Vorderansicht der Trainingsmaschine gemäß
Fig. 3 mit einem Unterschenkel und Fuß eines Benutzers; - Fig. 5
- eine Rückansicht der Trainingsmaschine gemäß
Fig. 4 ; - Fig. 6
- eine schematische Darstellung des Fußes in einer neutralen Stellung; und
- Fig. 7
- eine schematische Darstellung des Fußes bei angehobenem Sprunggelenk.
-
Fig. 1 zeigt in einer schematischen Darstellung eine vorschlagsgemäße Trainingsmaschine 1 im Sinne der vorliegenden Erfindung. Die Trainingsmaschine 1 ist zum Training des Sprunggelenks 2 eines Fußes 3 ausgebildet. - Die Trainingsmaschine 1 weist vorschlagsgemäß mindestens eine Bewegungsachse 4 auf, die der anatomischen bzw. funktionellen Gelenkachse eines menschlichen Gelenks - hier des Sprunggelenks 2 - zumindest im wesentlichen entspricht und/oder von den eingangs genannten Koordinatenachsen abweicht.
- Die Bewegungsachse 4 ist in
Fig. 1 strichpunktiert angedeutet. Die Draufsicht bzw, der im wesentlichen horizontale Schnitt gemäßFig. 2 zeigt die Bewegungsachse 4 ebenfalls. - Die Bewegungsachse 4 in der Trainingsmaschine 1 verläuft beim Darstellungsbeispiel vorzugsweise zumindest im wesentlichen um den Winkel α von etwa 42° +/- 9° zur Fußsohle 5 geneigt, besonders bevorzugt in Laufrichtung nach oben, wie in
Fig. 1 angedeutet. - Die Bewegungsachse 4 ist alternativ oder zusätzlich zur Hauptebene H des Fußes 3 in Laufrichtung zumindest im wesentlichen um den Winkel β von etwa 23° +/-10° nach innen geneigt, wobei die Hauptebene H des Fußes 3 vertikal bzw, senkrecht zur Fußsohle 5 und in Laufrichtung verläuft (
Fig. 2 ). - Die Trainingsmaschine 1 weist eine Fußaufnahme 6 zur Aufnahme des Fußes 3, insbesondere der Fußsohle 5, auf. Die Fußaufnahme 6 ist insbesondere plattenartig, starr, sohlenartig und/oder schuhartig ausgebildet.
- Beim Darstellungsbeispiel weist die Fußaufnahme 6 eine Fersenaufnahme 7 und eine Halterung 8 für den Vorderfußbereich, insbesondere im Bereich der Zehenknöchel, beispielsweise ein vorzugsweise verstellbares Band, auf.
- Die Trainingsmaschine 1 weist vorzugsweise ein Gelenk 9 auf, das die Fußauf nahme 6 um die Bewegungsachse 4 drehbar bzw. schwenkbar, insbesondere an einem Gestell G, lagert. Die Bewegungsachse 4 ist vorzugsweise durch das Gelenk 9 festgelegt.
- Die Bewegungsachse 4 verläuft vorzugsweise durch das Sprunggelenk 2. Um dies anpassen zu können und/oder die Bewegungsachse 4 in ihrer Neigung zu verändern, weist die Trainingsmaschine 1 vorzugsweise geeignete Einstelleinrichtungen auf. Beispielsweise können die Fersenaufnahme 7 und/oder Halterung 8 derart verstellbar sein, daß der Fuß 3 in Längsrichtung (Laufrichtung) verschiebbar bzw. justierbar ist. Weiter kann die bereits genannte Neigung der Bewegungsachse 4 beispielsweise durch entsprechende Quergelenke zwischen dem Gelenk 9 und der Fußaufnahme 6 oder auf sonstige geeignete Weise einstellbar sein.
- Die Trainingsmaschine 1 weist vorzugsweise eine Aufnahme bzw. Halterung 10 für den dem Fuß 3 zugeordneten Unterschenkel 11 auf. Die Aufnahme 10 kann beispielsweise ein Polster 12 und ein zugeordnetes Band 13, beispielsweise ein Klettband, oder dergleichen aufweisen, um eine sichere Fixierung des Unterschenkels 11 zu ermöglichen. Besonders bevorzugt ist die Aufnahme 10 derart ausgebildet, daß der Unterschenkel 11 im Bereich des Knies 14 oder unmittelbar darunter fixierbar ist. Zur optimalen Anpaßbarkeit ist die Aufnahme 10 dann insbesondere in der Höhe bzw. relativ zur Fußaufnahme 6 bzw. am Gestell G verstellbar.
- Vorzugsweise kann die jeweilige Bewegung um die Bewegungsachse 4 gegen eine insbesondere statische, dynamische und/oder einstellbare Kraft erfolgen. Besonders bevorzugt wirkt die Kraft in Rückstellrichtung. Jedoch kann grundsätzlich auch eine Kraft nur bei Bewegung - beispielsweise in der Art einer Reibungskraft - auftreten. Des weiteren kann die Kraft auch weg- bzw, winkelabhängig variieren und/oder in Abhängigkeit von der Bewegungsrichtung variieren.
- Beim Darstellungsbeispiel weist die Trainingsmaschine 1 eine Einrichtung 15 zur Erzeugung einer entsprechenden Kraft, insbesondere einer Rückstellkraft, auf. Insbesondere bewirkt die Einrichtung 15 eine Rückstellung der Fußaufnahme 6 in eine neutrale, beispielsweise zumindest im wesentlichen horizontale Stellung.
- Die Einrichtung 15 weist beim Darstellungsbeispiel einen am Gelenk 9 bzw. an der Fußaufnahme 6 angreifenden Schwenkhebel 16 mit einer zugeordneten Feder 17 auf. Jedoch sind hier auch andere konstruktive Lösungen möglich.
- Beim Darstellungsbeispiel weist die Trainingsmaschine 1 insbesondere nur eine Bewegungsachse 4 auf. Jedoch ist es auch möglich, mehrere Bewegungsachsen zu überlagern und/oder komplexere Bewegungen zu ermöglichen.
- Vorschlagsgemäß ist der Fuß 3 bzw. die Fußaufnahme 6 - zumindest mit einer Bewegungskomponente - in einer Verschieberichtung gemäß dem Doppelpfeil 19 in
Fig. 2 , in der Fußebene (Ebene der Fußsohle 5 bzw. Platten- oder Hauptebene der Fußaufnahme 6) verschiebbar. Die Verschieberichtung 19 verläuft in der Fußebene und im wesentlichen senkrecht (+/- 10 Grad) zur Projektion der Bewegungsachse 4 in die Fußebene. Dies gestattet ein optimaleres Training, da sich die Gelenksachse des Sprunggelenks 2 während der Schwenkbewegung translatorisch in die Verschieberichtung 19 verlagern kann und die vorschlagsgemäße Verschiebung bzw. Verschiebbarkeit dies gestattet. - Die vorschlagsgemäße Verschiebbarkeit ist beispielsweise durch eine entsprechende schlittenartige Führung, Führung in nicht dargestellten Langlöchern, Führung mittels Rollenschienen, eine teleskopische Führung oder dergleichen möglich. Insbesondere ist die Fußaufnahme 6 entsprechend in Verschieberichtung 19 verschiebbar von einem in
Fig. 1 angedeuteten Träger 21 oder dergleichen, der beispielsweise mit dem Gelenk 9 verbunden bzw. um die Bewegungsachse 4 schwenkbar ist, gelagert bzw. gehalten. - Zusätzlich zu der vorgenannten Verschiebbarkeit sind vorzugsweise die Fersenaufnahme 7 und/oder Halterung 8 zur Anpassung an den jeweiligen Fuß 3, insbesondere dessen Größe, verstellbar bzw: justierbar.
- Besonders bevorzugt erfolgt die Verschiebung in Verschieberichtung 19 frei. In diesem Fall ist der Unterschenkel 11 vorzugsweise durch eine zusätzliche Aufnahme 20 zusätzlich fixiert, insbesondere im Bereich des unteren Endes oder benachbart zum Sprunggelenk 2, wie in
Fig. 1 angedeutet. - Die beiden Aufnahmen 10, 20 sind vorzugsweise zueinander beabstandet und/oder in Längserstreckung des Unterschenkels 11 versetzt. So ist eine sichere Fixierung des Unterschenkels 11 möglich.
- Jedoch ist es grundsätzlich auch möglich, die Halterung 10 und/oder die Halterung 20 derart auszubilden, daß der Unterschenkel 11 und/oder das Knie 14 nur von vorne oder von hinten gegen ein entsprechendes Polster 12 oder dergleichen gedrückt wird. Insbesondere sind dann das Polster 12 im Bereich der Aufnahme 10 und ein nicht dargestelltes weiteres Polster im Bereich der Aufnahme 20 auf entgegengesetzten Seiten des Unterschenkels 11 angeordnet.
- Alternativ oder zusätzlich sind auch sonstige Anlagen oder Fixierungen des Unterschenkels 11 unmöglich.
- Anstelle der freien Verschiebbarkeit kann der Fuß 3 bzw. die Fußaufnahme 6 auch zwangsgeführt verschiebbar sein oder in ihrer Verschiebung mit dem Schwenken um die Bewegungsachse 4 gekoppelt sein. Insbesondere kann dies über ein nicht dargestelltes Getriebe, einen Bowdenzug oder dergleichen erfolgen.
- Alternativ oder zusätzlich kann das Verschwenken der Fußaufnahme 6 um die Bewegungsachse 4 und/oder das Verschieben in die Verschieberichtung 19 auch über einen gegebenenfalls gemeinsamen Antrieb oder über separate Antriebe erfolgen.
- Die vorschlagsgemäße Trainingsmaschine 1 gestattet ein besonders effektives und anatomisch richtiges Trainieren des Sprunggelenks 2.
- Die
Figuren 3 bis 5 zeigen eine zweite Ausführungsform der vorschlagsgemäßen Trainingsmaschine 1. Die zweite Ausrührungsform entspricht in der Funktionsweise zumindest im wesentlichen der ersten Ausführungsform. Gleiche oder ähnliche Teile sind mit den gleichen Bezugszeichen versehen, wobei die bisherigen Ausführungen und Erläuterungen entsprechend oder ergänzend gelten. -
Figur 3 zeigt die Trainingsmaschine 1 gemäß der zweiten Ausführungsform ohne Fuß bzw. Bein. Die Fersenaufnahme bzw. Kappe 7 ist hier vorzugsweise sowohl nach vorne und hinten als auch rechts und links verstellbar. - Die Einrichtung 15 ist bei der zweiten Ausführungsform anders ausgebildet. Insbesondere ist ein elastisches Element 18 vorgesehen, das vorzugsweise im Bereich des vorderen Fußes an der Fußaufnahme 6 angreift und insbesondere am Gestell G widergelagert ist.
-
Figur 4 zeigt die Trainingsmaschine 1 mit aufgenommenen Fuß 3 und fixiertem Unterschenkel 11. - Bei der zweiten Ausführungsform ist die Unterschenkelaufnahme 10 und/oder die Fußaufnahme 6 höhenverstellbar,
-
Figur 5 zeigt die Trainingsmaschine mit aufgenommenen Fuß 3 von hinten. -
Figur 6 zeigt in einer ausschnittsweisen schematischen Darstellung den Fuß 3 in einer neutralen Stellung des Sprunggelenks 2.Figur 7 zeigt in einer zuFigur 6 korrespondierenden Darstellung den pronierten, außen angehobenen Fuß 3. Der Fuß 3 ist also um die Bewegungsachse 4 im Sprunggelenk 2 nach oben angehoben. - Generell kann der Fuß 3 oder die Fußaufnahme 6, insbesondere die Fersenaufnahme 7 auch in Fußlängsrichtung - also in Richtung der Achse H in
Fig. 2 verstellbar sein. - Einzelne Merkmale und Aspekte der Ausführungsform können auch beliebig miteinander kombiniert und/oder bei sonstigen Trainingsmaschinen eingesetzt werden.
Claims (12)
- Trainingsmaschine (1), insbesondere zum Krafttraining, Koordinierungstraining und/oder Konditionstraining, mit einer Fußaufnahme (6) für einen Fuß (3), die um eine Bewegungsachse (4) schwenkbar ist, die der anatomisch/funktionellen Gelenkachse des Sprunggelenks (2) zumindest im wesentlichen entspricht,
dadurch gekennzeichnet,
daß der Fuß (3) oder die Fußaufnahme (6) in der Ebene der Fußsohle (5) oder einer Auflageebene der Fußaufnahme (6) zumindest im wesentlichen senkrecht zur Projektion der Bewegungsachse (4) in diese Ebene während des Verschwenkens der Fußaufnahme (6) um die Bewegungsachse (4) verschiebbar ist. - Trainingsmaschine nach Anspruch 1, dadurch gekennzeichnet, daß die Verschiebung zwangsgeführt ist oder erfolgt.
- Trainingsmaschine nach Anspruch 1 oder 2, dadurch gekennzeichnet, daß die Verschiebung in Abhängigkeit von oder gekoppelt mit dem Schwenken der Fußaufnahme (6) ist.
- Trainingsmaschine (1) nach Anspruch 1, dadurch gekennzeichnet, daß die Verschiebung frei erfolgt.
- Trainingsmaschine nach einem der voranstehenden Ansprüche, dadurch gekennzeichnet, daß die Trainingsmaschine (1) eine Halterung oder Aufnahme (10) für einen Unterschenkel (11), insbesondere im Bereich des Knies (14) oder benachbart zu dem Knie (14), aufweist.
- Trainingsmaschine (1) nach einem der voranstehenden Ansprüche, dadurch gekennzeichnet, daß die Trainingsmaschine (1) zwei Halterungen oder Aufnahmen (10, 20) für einen Unterschenkel (11) aufweist, die längst des Unterschenkels (11) versetzt bzw. beabstandet am Unterschenkel (11) angreifen, um diesen und/oder das Sprunggelenk (2) festzulegen.
- Trainingsmaschine nach einem der voranstehenden Ansprüche, dadurch gekennzeichnet, daß die Bewegungsachse (4) der Trainingsmaschine (1) um 42° +/- 9° zur Fußsohle (5) und/oder um 23° +/- 10° zur Hauptebene (H) des Fußes (3) in Laufrichtung nach innen geneigt ist, wobei die Hauptebene (H) des Fußes (3) vertikal zur Fußsohle (5) und in Laufrichtung verläuft.
- Trainingsmaschine einem der voranstehenden Ansprüche, dadurch gekennzeichnet, daß die Bewegungsachse (4) durch das Sprunggelenk (11) verläuft.
- Trainingsmaschine nach einem der voranstehenden Ansprüche, dadurch gekennzeichnet, daß die Ausrichtung der Bewegungsachse (4) - insbesondere die Neigung zur Fußsohle (5) und/oder zur Hauptebene (H) des Fußes (3) - einstellbar ist.
- Trainingmaschine nach einem der voranstehenden Ansprüche, dadurch gekennzeichnet, daß die Fußaufnahme (6) zumindest im wesentlichen starr und/oder plattenartig und/oder fußsohlenartig und/oder schuhartig ausgebildet ist.
- Trainingsmaschine nach einem der voranstehenden Ansprüche, dadurch gekennzeichnet, daß das Bewegen, insbesondere Schwenken, um die Bewegungsachse (4) gegen eine statische, dynamische und/oder einstellbare Kraft, insbesondere Federkraft, Gewichtskraft oder hydraulische Kraft, erfolgt.
- Trainingsmaschine nach einem der voranstehenden Ansprüche, dadurch gekennzeichnet, daß der Fuß (3) oder die Fußaufnahme (6), insbesondere eine Fersenaufnahme (7), in Fußlängsrichtung oder Laufrichtung verstellbar ist.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE202007008733 | 2007-06-20 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2005997A1 EP2005997A1 (de) | 2008-12-24 |
| EP2005997B1 true EP2005997B1 (de) | 2009-10-07 |
Family
ID=39800693
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP08011100A Active EP2005997B1 (de) | 2007-06-20 | 2008-06-19 | Trainingsmaschine |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP2005997B1 (de) |
| AT (1) | ATE444781T1 (de) |
| DE (2) | DE502008000135D1 (de) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109528442B (zh) * | 2018-11-20 | 2020-09-15 | 上海市第十人民医院 | 一种踝关节康复训练辅助装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4452447A (en) * | 1980-07-07 | 1984-06-05 | Isotechnologies, Inc. | Ankle exerciser |
| US4650183A (en) | 1985-05-20 | 1987-03-17 | Isotechnologies, Inc. | Exercise apparatus for certain foot and ankle joints |
| WO2005077470A1 (en) * | 2004-02-16 | 2005-08-25 | Michael Jeffery Amann | Device for exercising the musculature of an ankle and device for controlling the movement of an external element |
| DE502006008317D1 (de) * | 2005-09-23 | 2010-12-30 | Kieser Training Ag | Trainingsmaschine |
-
2008
- 2008-06-19 EP EP08011100A patent/EP2005997B1/de active Active
- 2008-06-19 DE DE502008000135T patent/DE502008000135D1/de active Active
- 2008-06-19 AT AT08011100T patent/ATE444781T1/de active
- 2008-06-19 DE DE202008012020U patent/DE202008012020U1/de not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| EP2005997A1 (de) | 2008-12-24 |
| DE502008000135D1 (de) | 2009-11-19 |
| ATE444781T1 (de) | 2009-10-15 |
| DE202008012020U1 (de) | 2008-12-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1454823A2 (de) | Sattel | |
| EP1761428B1 (de) | Funktionelle tretmechanik | |
| EP3993883B1 (de) | Trainingsgerät zum trainieren der nackenmuskulatur | |
| EP0354555A2 (de) | Trainingsgerät und Rollstuhl für Behinderte | |
| EP1767249B1 (de) | Trainingsmaschine | |
| EP2005997B1 (de) | Trainingsmaschine | |
| DE2821644A1 (de) | Schuh fuer laufspiel- und sportzwecke | |
| WO2018206292A1 (de) | Fitnessgerät für liegestütze-übungen | |
| DE102012105104B4 (de) | Axial bewegliches Pedal | |
| EP1952847A1 (de) | Trainingsgerät zum Aufbau der diagonalen Bewegungsmuskulatur, insbesondere für die Innenskitechnik | |
| WO2004110566A1 (de) | Sportgerät für stationäres laufen im sitzen | |
| DE4203917C2 (de) | Tretkurbelergometer zum problemlosen Fahrradfahren im Sitzen und Liegen, das zudem das Krafttraining der unteren Extremitäten ermöglicht | |
| DE60115318T2 (de) | Übungsgerät mit verlängerter Schrittweite | |
| DE202006014818U1 (de) | Trainingsmaschine | |
| DE4404855C2 (de) | Sprintkraft-Trainingsgerät | |
| DE60222398T2 (de) | Vorrichtung zum Muskeltraining einer Person | |
| DE102004008899B3 (de) | Trainingsgerät | |
| EP3912694B1 (de) | Gymnastikvorrichtung | |
| EP4173682B1 (de) | Skibindung, insbesondere tourenskibindung | |
| DE102008063083A1 (de) | Ski | |
| EP3558476B1 (de) | Sprungschuh | |
| DE9411573U1 (de) | Trainingsgerät | |
| DE102017106640B3 (de) | Lauftrainer | |
| DE202007014943U1 (de) | Fitnessgerät | |
| DE102020124398A1 (de) | Trainingsgerät zum Trainieren einzelner Muskelgruppen im Oberkörper |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA MK RS |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: HAGEN, MARCO |
|
| 17P | Request for examination filed |
Effective date: 20081230 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| AKX | Designation fees paid |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: KIESER TRAINING AG Owner name: UNIVERSITAET DUISBURG-ESSEN |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REF | Corresponds to: |
Ref document number: 502008000135 Country of ref document: DE Date of ref document: 20091119 Kind code of ref document: P |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091007 |
|
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| LTIE | Lt: invalidation of european patent or patent extension |
Effective date: 20091007 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091007 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100107 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100118 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091007 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091007 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100207 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FD4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091007 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091007 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091007 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100107 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091007 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091007 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091007 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091007 Ref country code: IE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091007 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091007 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091007 |
|
| 26N | No opposition filed |
Effective date: 20100708 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100108 |
|
| BERE | Be: lapsed |
Owner name: KIESER TRAINING A.G. Effective date: 20100630 Owner name: UNIVERSITAT DUISBURG-ESSEN Effective date: 20100630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100630 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20110228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091007 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091007 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091007 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100307 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100408 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100619 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PCOW Free format text: UNIVERSITAET DUISBURG-ESSEN;UNIVERSITAETSSTRASSE 2;45141 ESSEN (DE) $ KIESER TRAINING AG;HARDSTRASSE 223;8005 ZUERICH (CH) |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091007 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 502008000135 Country of ref document: DE Representative=s name: VON ROHR PATENTANWAELTE PARTNERSCHAFT MBB, DE |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20120619 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20120619 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250624 Year of fee payment: 18 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20250620 Year of fee payment: 18 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20250701 Year of fee payment: 18 |