EP1641704B1 - Bewegliche sensoreinrichtung am lastmittel eines gabelstaplers - Google Patents
Bewegliche sensoreinrichtung am lastmittel eines gabelstaplers Download PDFInfo
- Publication number
- EP1641704B1 EP1641704B1 EP04731005A EP04731005A EP1641704B1 EP 1641704 B1 EP1641704 B1 EP 1641704B1 EP 04731005 A EP04731005 A EP 04731005A EP 04731005 A EP04731005 A EP 04731005A EP 1641704 B1 EP1641704 B1 EP 1641704B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- load
- sensor
- load sensor
- forklift
- lifting fork
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/0755—Position control; Position detectors
Definitions
- the invention relates to a method for operating a movable load sensor for the load detection and monitoring on a forklift, and a movable load sensor device on a forklift according to the preambles of claims 1 and 7.
- the EP 0800129 B1 shows an industrial truck, in particular a counterbalance forklift, which is optionally operated manually or automatically.
- the forklift is equipped with a control system which is in communication with the drive, the steering, the brake system and the movement control of the fork.
- a means is provided for entering and storing possible travel routes and a transport task.
- an odometry system and an image processing system with at least one navigation camera is used for the autonomous determination of the vehicle position in space, wherein the navigation camera is mounted on the opposite side of the fork in the upper region of the driver's roof.
- At least one other camera is for detecting the presence, position and orientation of a pallet. Whereby this camera is fork-side, motion-same to the fork, attached to the truck. The control of the fork and / or the vehicle takes place depending on the position, the orientation of the pallet and the transport task. In addition, a means is provided, whereby the vehicle is braked in the presence of obstacles.
- the patent application WO 94/05586 shows an apparatus and a method for controlling a container crane .
- the positions of points on an edge of the loading gear or a container received therein and a point of an edge located in a destination measured and converted into signals for controlling the crane drive.
- the sensors used here are customary 2D rangefinders which use a laser beam or a microwave beam as the measurement beam. By additionally swiveling the scanning plane of the 2D rangefinder, a surface scan is generated. For this reason, the sensor is movably received in the direction of the selected edge to be scanned.
- Such a 3D range image sensor supplies to the measured points in each case all three space coordinates.
- the forklift may be an automatic or semi-automatic forklift truck.
- the orientation of the load means by means of the device in a certain position relative to the load.
- the device comprises a camera, by means of which images of the load are scanned.
- a light source homogeneously illuminating the light source, which is mechanically connected to the camera, a clear image of the load consisting of shadows and reflections is detected opto-electronically by means of the camera.
- the camera and the light source are connected to the load means such that they are arranged to be movable together with the load means.
- a one-dimensional camera arrangement is sufficient; the second dimension is generated by the movement of the load means during scanning. So that the field of view of the camera is not covered by the load, the camera is located below the load medium. Only when lowering the load means on the ground, the camera is held by a mechanical stop and raised telescopically above the level of the load means, so as to prevent damage to the camera. However, when raising the camera above the level of the load means the field of view of the camera is at least partially obscured by structural parts of the load means, in particular a view of the load or the lifting fork is then no longer possible. In addition, the movement of the camera arranged light sources are at least partially hidden by structural parts of the load means, whereby a homogeneous illumination is then no longer possible.
- a transport vehicle is shown with a mast and a lifting fork.
- the lifting fork is connected via a load means with the mast and can be moved in the vertical direction along the mast up and down.
- a camera unit is arranged, which is used as a load sensor.
- the load sensor is movable within a fixed predetermined range in the vertical direction relative to the load means, wherein the fixed predetermined range a raised and a lowered position includes.
- the raised position is a parking position in which the load sensor is above the level of the lifting fork.
- the load sensor is below the level of the lifting fork.
- a forklift is shown with a sensor suitable for ambient detection, which detects the actual height adjustment of the lifting fork.
- the sensor is arranged here away from the mast of the forklift on the lifting fork. When moving the lifting fork, the sensor moves in the vertical direction together with the lifting fork relative to the mast of the forklift.
- the sensor is arranged to be movable in the vertical direction relative to the lifting fork. The image information captured by the sensor is presented to the driver on an image display.
- the invention is therefore based on the object to provide a movable load sensor device on the load means of a forklift and a method for operating the load sensor according to the preambles of claims 1 and 7, which makes it possible the load means of the forklift taking into account dynamic environmental changes with high accuracy to be positioned.
- a movable load sensor is used for load detection and monitoring on a forklift.
- the load sensor is mounted and aligned on the forklift in such a way that the load and / or the lifting fork and / or the surroundings ahead of the forklift can be detected.
- the sensor data detected by means of the load sensor are then evaluated by means of a computer unit.
- the load sensor is in this case mounted to move with the load means with respect to the mast movable on the forklift.
- the load sensor can additionally be moved relative to the load means.
- the load sensor for example, if the field of view of the camera is obscured by structural parts of the forklift, be moved within a fixed predetermined range with respect to the load means.
- the position and orientation of the load can also be checked during transport by the movability of the load sensor relative to the load means.
- a linear drive may be provided on the load means for moving the load sensor.
- the invention first makes it possible to take into account dynamic changes in the environment of the forklift during the docking process. For example, a load parked by a worker, unlike automatically positioned loads, is not always exactly at the same position. It can also happen, for example, that a load is accidentally moved during a docking operation by the load means of the forklift itself.
- the targeted application of the load sensor allows the load to be precisely recorded at all times, even under difficult lighting conditions in industrial environments, and the load can then be positioned with high accuracy to suit dynamic changes in the environment.
- the load means is usually raised while driving.
- the load sensor is thereby moved in the vertical direction into a position below the level of the lifting fork.
- the detected environment information can then be used, for example, for path planning or further processing in the context of an obstacle detection, in order, e.g. Avoid collisions.
- the load means is also in the raised state, but the load sensor is advantageously moved in a vertical direction into a position above the level of the lifting fork.
- the load can be accurately detected with respect to its position and orientation by means of the load sensor even while driving in order to be able to detect a slippage of the load in good time.
- Slippage of the load can also be detected with the load sensor, if this is below the level of the lifting fork.
- e.g. advantageously detects a slippage of the load relative to the lifting fork.
- the load sensor in the horizontal direction in a position left or right next to the lifting fork is movable.
- the load sensor When transporting a load with the forklift, it is possible to look past the load with the load sensor laterally. For example, thus the lateral distance between load and track boundary can be better detected.
- a look on the side next to the lifting fork is a great advantage.
- a lateral method of the load sensor may be advantageous, for example, a load may be sampled from a suitable view prior to docking.
- the load sensor can additionally be tilted in the vertical direction and / or pivoted in the horizontal direction in order to fully exploit the possibility of different views can.
- the load sensor it is also conceivable to combine a plurality of different sensors as a movable load sensor and if necessary to carry out a sensor data fusion.
- the environmental information acquired by means of different sensors can be compared with the information from the odometry system of the forklift.
- the movable load sensor (1) is shown on a forklift (7).
- the load sensor (1) is connected together with the relative to the mast (5) movable load means (6).
- the load sensor (1) in this case within a predetermined range in addition to the lifting fork (2) is movable.
- the environmental information acquired by the load sensor may then be used be evaluated by the computer unit (4).
- the computer unit (4) can also be provided for controlling the forklift and the sensor system.
- the Fig. 2a shows an example of a detailed view of the load sensor (1), which is connected to the load means (6) and moved together.
- the load sensor (1) is here moved by means of the linear drive (3) relative to the lifting fork (2) within a predetermined range.
- the load sensor (1) is below the level of the lifting fork (2).
- This variant is particularly suitable for operation of the forklift with lifted load means (6).
- Fig. 2b a detail view of the load sensor (1) is shown, in which the load sensor (1) is above the level of the lifting fork (2).
- the mechanism for the linear drive (3) is also above the level of the lifting fork (2). This makes it possible for the lifting fork (2) to be placed completely on the ground without damaging the linear drive (3) or the load sensor (1).
- a forklift (7) is shown with the device according to the invention.
- the forklift (7) is just on the approach to receiving a load (8).
- the load means (6) is still in the raised state before docking.
- the load sensor (1) is therefore preferably below the level of the lifting fork (2).
- a pan-tilt head (9) is provided, with which the load sensor (1) can be pivoted and tilted and thus different views can be realized.
- the load sensor (1) is in this case aligned such that both the travel path (10) and the load (8) are detected.
- the load means (6) for receiving the load (8) is lowered.
- the load sensor (1) by means of the linear drive (3) above the level of the lifting fork (2) is raised.
- the retraction of the lifting fork (2) into the pockets of the Euro pallet (11) can be detected accurately during the docking process even in difficult lighting conditions and deviations in the position can be corrected if necessary.
- Fig. 5 shows the transport of a load (8) with the forklift (7).
- the load sensor (1) is located below the lifting fork (2) in order to detect the travel path of the forklift, for example in the context of an obstacle detection. If the load sensor (1) is moved only slightly below the level of the lifting fork (2), at the same time, if necessary, a slipping of the load (8) relative to the lifting fork (2) can be determined.
- the load sensor (1) during the transport of a load (8) above the level of the lifting fork (2) is raised.
- the load (8) during transport with the forklift (7) can be accurately detected, while at the same time a part of the route and the lifting fork (2) can be observed.
- the load sensor (1) is additionally movable in the horizontal direction.
Description
- Die Erfindung betrifft ein Verfahren zum Betrieb eines beweglichen Lastsensors für die Lasterkennung und -überwachung an einem Gabelstapler, sowie eine bewegliche Lastsensor einrichtung an einem Gabelstapler nach den Oberbegriffen der Patentansprüche 1 und 7.
- Im industriellen Bereich werden vermehrt fahrerlose Transportsysteme eingesetzt, jedoch sind die derzeit am Markt angebotenen fahrerlosen Transportsysteme noch relativ unflexibel. Sie können sich nur auf exakt vorgegebenen Fahrspuren fortbewegen und es ist ihnen nicht möglich selbständig einen Weg zu finden. Ebenso wie bei stationären Industrierobotern muss die Arbeitsumgebung den Robotern angepasst werden. Daher können diese Roboter nicht für Aufgaben genutzt werden, bei denen sich die Arbeitsumgebung dynamisch verändert oder die Platzierung von zu transportierenden Lasten nicht exakt gesteuert werden kann. Autonome, frei navigierende und universell einsetzbare Roboter werden aber künftig nicht mehr an fest vorgegebenen Positionen und auf fest vorgegebenen Wegen arbeiten, diese werden zusammen mit dem Menschen in einer sich dynamisch ändernden Umgebung eingesetzt werden. Um die dafür notwendigen und anspruchsvollen Anforderungen erfüllen zu können, benötigen moderne mobile Roboter zusätzliche Sensoren. Beispielsweise ermöglichen handelsübliche Entfernungs-, Bild- oder Ultraschallsensoren die exakte Bestimmung der Fahrzeug- und Lastposition sowie das Erkennen von Hindernissen zur Vermeidung von Kollisionen.
- Die
EP 0800129 B1 zeigt ein Flurförderfahrzeug, insbesondere einen Gegengewichtsgabelstapler, welcher wahlweise manuell oder automatisch betreibbar ist. Für den automatischen Betrieb ist der Gabelstapler mit einem Kontrollsystem ausgestattet, welches in Wirkverbindung mit dem Fahrantrieb, der Lenkung, der Bremsanlage und der Bewegungssteuerung der Gabel steht. Weiterhin ist ein Mittel zum Eingeben und Speichern von möglichen Fahrrouten und einer Transportaufgabe vorgesehen. Zur Steuerung der Bewegung des Fahrzeugs in Abhängigkeit von dessen Position im Raum und von der vorgegebenen Transportaufgabe sind weitere Mittel vorhanden. Hierbei wird zum autonomen Bestimmen der Fahrzeugposition im Raum eine Odometrieanlage sowie eine Bildverarbeitungsanlage mit mindestens einer Navigationskamera verwendet, wobei die Navigationskamera auf der der Gabel gegenüberliegenden Seite im oberen Bereich des Fahrerschutzdaches angebracht ist. Wenigstens eine weitere Kamera dient zum Erkennen des Vorhandenseins, der Position und der Ausrichtung einer Palette. Wobei diese Kamera gabelseitig, bewegungsgleich zur Gabel, am Flurförderzeug befestigt ist. Die Steuerung der Gabel und/oder des Fahrzeugs erfolgt in Abhängigkeit von der Position, der Ausrichtung der Palette und der Transportaufgabe. Zusätzlich ist ein Mittel vorhanden, womit das Fahrzeug beim Vorhandensein von Hindernissen abgebremst wird. - In der Patentanmeldung W0 94/05586 werden eine Vorrichtung und ein Verfahren zur Steuerung eines Containerkranes gezeigt. Dabei werden mittels mindestens einem Sensor die Positionen von Punkten auf einer Kante des Ladegeschirrs oder einem darin aufgenommenen Container sowie eines Punktes einer in einem Zielort befindlichen Kante vermessen und in Signale zur Ansteuerung des Kranantriebes umgesetzt. Als Sensoren kommen hierbei übliche 2D-Entfernungsmesser zum Einsatz, welche als Mess-Strahl einen Laserstrahl oder einen Mikrowellenstrahl verwenden. Indem die Abtastebene des 2D-Entfernungsmessers zusätzlich verschwenkt wird, wird ein Flächenscan generiert. Aus diesem Grund wird der Sensor in Richtung der ausgewählten abzutastenden Kante beweglich aufgenommen. Ein derartiger 3D-Entfernungsbildsensor liefert zu den vermessenen Punkten jeweils alle drei Raumkoordinaten.
- In der
US 4279328 wird eine Vorrichtung zur Ausrichtung von Hebemitteln, insbesondere dem Lastmittel eines Gabelstaplers gezeigt. Bei dem Gabelstapler kann es sich hierbei um einen automatisch oder halbautomatisch betriebenen Gabelstapler handeln. Die Ausrichtung des Lastmittels erfolgt mittels der Vorrichtung in eine bestimmte Position relativ zur Last. Die Vorrichtung umfasst hierzu eine Kamera, mittels derer Bilder der Last abgetastet werden. Unter Zuhilfenahme einer die Last homogen beleuchtenden Lichtquelle, welche mit der Kamera mechanisch in Verbindung steht, wird mittels der Kamera ein eindeutiges Abbild der Last bestehend aus Schatten und Reflexionen optoelektronisch detektiert. Die Kamera sowie die Lichtquelle sind dabei derart mit dem Lastmittel verbunden, dass diese zusammen mit dem Lastmittel beweglich angeordnet sind. Hierbei genügt eine eindimensionale Kameraanordnung, die zweite Dimension wird durch die Bewegung des Lastmittels beim Abtasten generiert. Damit das Sichtfeld der Kamera nicht durch das Lastmittel verdeckt wird, befindet sich die Kamera unterhalb des Lastmittels. Lediglich beim Absenken des Lastmittels auf den Boden wird die Kamera durch einen mechanischen Anschlag gehalten und teleskopartig über das Niveau des Lastmittels angehoben, um somit eine Beschädigung der Kamera zu verhindern. Jedoch wird beim Anheben der Kamera über das Niveau des Lastmittels das Sichtfeld der Kamera durch Konstruktionsteile des Lastmittels zumindest teilweise verdeckt, insbesondere ist dann ein Blick auf die Last bzw. die Hubgabel nicht mehr möglich. Zudem werden die bewegungsgleich zur Kamera angeordneten Lichtquellen zumindest teilweise durch Konstruktionsteile des Lastmittels verdeckt, wodurch eine homogene Ausleuchtung dann nicht mehr möglich ist. Aus diesem Grund ist es notwendig beim Absetzen des Lastmittels bzw. beim Einfahren in die Gabeltaschen (Docking) einer Euro-Palette blind ohne visuelle Informationen rein unter Verwendung von Vorwissen zu steuern. Der Nachteil bei einer lediglich auf Vorwissen basierender Ansteuerung ist, dass hierbei dynamische Veränderungen in der Umgebung nicht berücksichtigt werden und die Positionierung des Lastmittels relativ ungenau erfolgt. - In der
WO 02/064490A1 - In der
US 5,586,620 wird ein Gabelstapler mit einem zur Umgebungserfassung geeigneten Sensor gezeigt, womit die tatsächliche Höheneinstellung der Hubgabel erfasst wird. Der Sensor ist hierbei entfernt vom Mast des Gabelstaplers an dessen Hubgabel angeordnet. Beim Bewegen der Hubgabel verfährt der Sensor in vertikaler Richtung gemeinsam mit der Hubgabel relativ gegenüber dem Mast des Gabelstaplers. Darüber hinaus ist vorgesehen, dass der Sensor in vertikaler Richtung gegenüber der Hubgabel verfahrbar angeordnet ist. Die vom Sensor erfasste Bildinformation wird dem Fahrer dabei auf einer Bildanzeige dargeboten. - Der Erfindung liegt daher die Aufgabe zu Grund, eine bewegliche Lastsensor einrichtung am Lastmittel eines Gabelstaplers sowie ein Verfahren zum Betrieb des Lastsensors gemäß den Oberbegriffen der Patentansprüche 1 und 7 zu schaffen, womit es möglich wird das Lastmittel des Gabelstaplers unter Berücksichtigung dynamischer Umgebungsänderungen mit hoher Genauigkeit zu positionierten.
- Die Aufgabe wird gemäß der Erfindung durch ein Verfahren und eine Vorrichtung mit den Merkmalen der Patentansprüche 1 und 7 gelöst. Vorteilhafte Ausgestaltungen und Weiterbildungen der Erfindung werden in den Unteransprüchen aufgezeigt.
- Gemäß der Erfindung wird ein beweglicher Lastsensor zur Lasterkennung und -überwachung an einem Gabelstapler eingesetzt. Der Lastsensor ist dabei derart am Gabelstapler angebracht und ausgerichtet, dass damit die Last und/oder die Hubgabel und/oder die dem Gabelstapler vorausliegende Umgebung erfasst werden kann. Die mittels dem Lastsensor erfassten Sensordaten werden sodann mittels einer Rechnereinheit ausgewertet. Der Lastsensor ist hierbei bewegungsgleich mit dem Lastmittel gegenüber dem Mast verfahrbar am Gabelstapler angebracht. In einer erfinderischen Weise ist der Lastsensor hierbei zusätzlich relativ gegenüber dem Lastmittel verfahrbar. In vorteilhafter Weise kann der Lastsensor beispielsweise, falls das Sichtfeld der Kamera durch Konstruktionsteile des Gabelstaplers verdeckt wird, innerhalb einem fest vorgegebenen Bereich gegenüber dem Lastmittel verfahren werden. Ein weiterer Vorteil ist es, dass durch die Verfahrbarkeit des Lastsensors gegenüber dem Lastmittel die Position und Orientierung der Last auch während dem Transport überprüft werden kann. Zum Verfahren des Lastsensors kann beispielsweise ein Linearantrieb am Lastmittel vorgesehen sein. Durch die Erfindung wird es erst möglich, dynamische Änderungen in der Umgebung des Gabelstaplers während des Docking-Vorgangs zu berücksichtigen. Beispielsweise befindet sich eine durch einen Werker abgestellte Last im Gegensatz zu automatisch positionierten Lasten nicht immer exakt an derselben Position. Auch kann es beispielsweise dazu kommen, dass eine Last bei einem Docking-Vorgang durch das Lastmittel des Gabelstaplers selbst versehentlich verschoben wird. Durch das gezielte Verfahren des Lastsensors kann die Last zu jeder Zeit auch bei schwierigen Beleuchtungsverhältnissen im industriellen Umfeld exakt erfasst werden und das Lastmittel sodann mit hoher Genauigkeit an dynamische Änderungen in der Umgebung angepasst positioniert werden.
- Falls der Gabelstapler leer fährt und keine Last zu transportiert hat, wird das Lastmittel während der Fahrt üblicherweise angehoben. In einer vorteilhaften Weise wird der Lastsensor dabei in vertikaler Richtung in eine Position unter das Niveau der Hubgabel verfahren. Dadurch kann mit dem Lastsensor die dem Gabelstapler vorausliegende Umgebung gut erfasst werden. Die erfasste Umgebungsinformation kann sodann beispielsweise zur Wegplanung oder zur Weiterverarbeitung im Rahmen einer Hinderniserkennung genutzt werden, um z.B. Kollisionen zu vermeiden. Falls mit dem Gabelstapler jedoch eine Last transportiert wird, befindet sich das Lastmittel zwar ebenfalls in angehobenem Zustand, der Lastsensor wird dabei aber in vorteilhafter Weise in vertikaler Richtung in eine Position über das Niveau der Hubgabel verfahren. Wodurch die Last mittels dem Lastsensor auch während der Fahrt hinsichtlich ihrer Position und Orientierung genau erfasst werden kann, um somit ein Verrutschen der Last rechtzeitig erkennen zu können. Ein Verrutschen der Last kann mit dem Lastsensor jedoch auch festgestellt werden, falls sich dieser unter dem Niveau der Hubgabel befindet. Hierbei wird z.B. in vorteilhafter Weise ein Verrutschen der Last gegenüber der Hubgabel erfasst.
- Gemäß der Erfindung ist der Lastsensor in horizontaler Richtung in eine Position links oder rechts neben die Hubgabel verfahrbar. Beim Transport einer Last mit dem Gabelstapler ist es dadurch möglich, mit dem Lastsensor seitlich an der Last vorbei zu schauen. Beispielsweise kann somit der seitliche Abstand zwischen Last und Fahrwegbegrenzung besser erfasst werden. Auch beim Einsatz im Zusammenhang mit Hochregallagern ist ein Blick seitlich neben die Hubgabel von großem Vorteil. Selbst wenn keine Last mit dem Gabelstapler transportiert wird, kann ein seitliches Verfahren des Lastsensors von Vorteil sein, beispielsweise kann eine Last vor dem Docking-Vorgang aus einer geeigneten Ansicht abgetastet werden. In besonderem Maße hat es sich auch bewährt, dass der Lastsensor zusätzlich in vertikaler Richtung geneigt und/oder in horizontaler Richtung geschwenkt werden kann, um die Möglichkeit unterschiedlicher Ansichten vollständig ausnutzen zu können.
- Zur Lasterkennung und -überwachung eigenen sich besonders Entfernungsinformationen erfassende Sensoren, dem Fachmann sind hierzu unterschiedlichste Sensoren bekannt. Vor allem haben sich handelsübliche Laserscanner beim Einsatz als Lastsensor bewährt. Derartige Laserscanner erfassen 2D-Entfernungsdaten im Nahbereich mit einer Tiefenauflösung von ca. lcm bei einem Entfernungsradius von ca. 8m und unter einem Sichtwinkel von wenigstens 180 Grad. Hierbei ist es selbstverständlich auch denkbar mehrere dieser Entfernungsmessenden Sensoren am Lastmittel anzubringen, um damit beispielsweise einen noch größeren Bereich um den Gabelstapler erfassen zu können. Jedoch ist es auch denkbar, dass zur Lasterkennung und -überwachung visuelle Informationen herangezogen werden. Hierbei kommen Bildgebende Sensoren wie beispielsweise Kameras zum Einsatz, welche CCD-Arrays umfassen. Dem Fachmann sind hierbei unterschiedliche Kameratypen bekannt, welche sowohl im sichtbaren als auch im nichtsichtbaren Wellenlängenspektrum empfindlich sein können. Für den Einsatz am bewegten Lastmittel eines Gabelstaplers als Lastsensor ist jedoch die Verwendung einer Kamerazeile ausreichend. 2D-Entfernungsdaten werden hierbei aufgrund der Bewegung des Lastmittels generiert. Selbstverständlich ist es hierbei auch denkbar mehrere Sensoren am Lastmittel anzuordnen. Wobei insbesondere durch die Verwendung einer Stereoanordnung auch Tiefeninformationen generiert werden können. Auch ist es denkbar für die Lasterkennung und Lastüberwachung akustische Informationen heranzuziehen. Hierbei kommen im industriellen Umfeld vor allem Ultraschallsensoren zum Einsatz. Diese besitzen im Vergleich zu optoelektronischen Sensoren zwar ein etwas geringeres Auflösungsvermögen, sind dafür aber relativ kostengünstig. Selbstverständlich ist es im Zusammenhang mit dem Lastsensor auch denkbar mehrere unterschiedliche Sensoren als beweglichen Lastsensor zu kombinieren und ggf. eine Sensordatenfusion durchzuführen. Zusätzlich können die mittels unterschiedlicher Sensoren erfassten Umgebungsinformationen mit den Informationen der Odometrieanlage des Gabelstaplers abgeglichen werden.
- Weitere Merkmale und Vorteile der Erfindung ergeben sich aus der folgenden Beschreibung von Ausführungsbeispielen anhand der Figuren. Dabei zeigen:
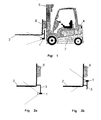
- Fig. 1
- Gabelstapler mit einem beweglichen Lastsensor
- Fig. 2a
- Detailansicht des beweglichen Lastsensors mit Positionierung unterhalb der Hubgabel
- Fig. 2b
- Detailansicht des beweglichen Lastsensors mit Positionierung oberhalb der Hubgabel
- Fig. 3
- Anfahrt des Gabelstaplers zur Lastaufnahme
- Fig. 4
- Absenken des Lastmittels Beim Docking-Vorgang
- Fig. 5
- Transport einer Last mit Fahrwegüberwachung
- Fig. 6
- Transport einer Last mit Lastüberwachung
- In
Fig. 1 wird beispielhaft der erfindungsgemäße bewegliche Lastsensor (1) an einem Gabelstapler (7) gezeigt. Dabei ist der Lastsensor (1) gemeinsam mit dem gegenüber dem Mast (5) verfahrbaren Lastmittel (6) verbunden. Wobei der Lastsensor (1) hierbei innerhalb eines vorgegebenen Bereichs zusätzlich gegenüber der Hubgabel (2) verfahrbar ist. Die mittels dem Lastsensor erfassten Umgebungsinformationen können sodann mittels der Rechnereinheit (4) ausgewertet werden. Die Rechnereinheit (4) kann dabei Grundsätzlich auch für die Ansteuerung des Gabelstaplers sowie der Sensorik vorgesehen sein. - Die
Fig. 2a zeigt beispielhaft eine Detailansicht des Lastsensors (1), welcher mit dem Lastmittel (6) gemeinsam verbunden und verfahrbar ist. Der Lastsensor (1) wird hierbei mittels dem Linearantrieb (3) gegenüber der Hubgabel (2) innerhalb eines vorgegebenen Bereichs verfahren. Bei dem Ausführungsbeispiel gem.Fig. 2a befindet sich der Lastsensor (1) unterhalb dem Niveau der Hubgabel (2). Diese Variante bietet sich insbesondere für einen Betrieb des Gabelstaplers mit angehobenem Lastmittel (6) an. Wohingegen inFig. 2b eine Detailansicht des Lastsensors (1) dargestellt ist, bei der sich der Last-sensor (1) über dem Niveau der Hubgabel (2) befindet. Wobei sich die Mechanik für den Linearantrieb (3) ebenfalls über dem Niveau der Hubgabel (2) befindet. Dadurch wird es erst möglich, dass die Hubgabel (2) vollständig auf dem Boden abgesetzt wird, ohne dabei den Linearantrieb(3) oder den Lastsensor (1) zu beschädigen. - In
Fig. 3 wird ein Gabelstapler (7) mit der erfindungsgemäßen Vorrichtung dargestellt. Der Gabelstapler (7) befindet sich dabei gerade auf der Anfahrt zur Aufnahme einer Last (8). Das Lastmittel (6) befindet sich vor dem Docking-Vorgang noch in angehobenem Zustand. Der Lastsensor (1) befindet sich daher vorzugsweise unter dem Niveau der Hubgabel (2). Zusätzlich ist ein Schwenk-Neige-Kopf (9) vorgesehen, womit der Lastsensor (1) geschwenkt und geneigt werden kann und somit unterschiedliche Ansichten realisierbar sind. Der Lastsensor(1) ist hierbei derart ausgerichtet, dass sowohl der Fahrweg (10) als auch die Last (8) erfasst werden. - Bei dem in
Fig. 4 dargestellten Gabelstapler (7) wird das Lastmittel (6) zur Aufnahme der Last (8) abgesenkt. Hierbei wird der Lastsensor (1) mittels dem Linearantrieb (3) über das Niveau der Hubgabel (2) angehoben. Dadurch kann beim Docking-Vorgang das Einfahren der Hubgabel (2) in die Taschen der Euro-Palette (11) selbst bei schwierigen Beleuchtungsverhältnissen genau erfasst werden und Abweichungen in der Position ggf. korrigiert werden. -
Fig. 5 zeigt den Transport einer Last (8) mit dem Gabelstapler (7). Hierbei befindet sich der Lastsensor (1) unterhalb der Hubgabel (2), um den Fahrweg des Gabelstaplers, beispielsweise im Rahmen einer Hinderniserkennung zu erfassen. Falls der Lastsensor (1) dabei nur wenig unter das Niveau der Hubgabel (2) verfahren wird, kann gleichzeitig auch ggf. ein Verrutschen der Last (8) gegenüber der Hubgabel (2) festgestellt werden. - Wie in
Fig. 6 dargestellt ist es auch denkbar, dass der Lastsensor (1) während dem Transport einer Last (8) über das Niveau der Hubgabel (2) angehoben wird. Hierbei kann die Last (8) während dem Transport mit dem Gabelstapler (7) genau erfasst werden, wobei gleichzeitig auch ein Teil des Fahrweges und der Hubgabel(2) beobachtet werden kann. In vorteilhafter Weise ist der Lastsensor (1) dabei zusätzlich in horizontaler Richtung verfahrbar. - Selbstverständlich können mehrere/unterschiedliche Sensoren als Lastsensor kombiniert werden, wodurch sich die Umgebungserfassung weiter verbessern lässt und sich weitere Anwendungsszenarien ergeben. Auch ist es dabei denkbar weitere Schwenk-Neige-Köpfe im Zusammenhang mit den Sensoren einzusetzen.
Claims (12)
- Verfahren zum Betrieb eines beweglichen Lastsensors (1) für die Lasterkennung und -überwachung an einem Gabelstapler,
wobei mittels dem Lastsensor (1) die Last (3) und/oder die Hubgabel (2) und/oder die dem Gabelstapler (7) vorausliegende Umgebung erfasst wird,
und die mit dem Lastsensor (1) erfassten Sensordaten mittels einer Rechnereinheit (4) ausgewertet werden, wobei der Lastsensor (1) bewegungsgleich mit dem Lastmittel (6) gegenüber dem Mast (5) des Gabelstaplers verfahrbar ist
und wobei der Lastsensor (1) innerhalb eines fest vorgegebenen Bereichs in vertikaler Richtung relativ gegenüber dem Lastmittel (6) verfahrbar ist,
dadurch gekennzeichnet,
dass der Lastsensor (1) in horizontaler Richtung in eine Position links oder rechts neben die Hubgabel (2) verfahrbar ist. - Verfahren nach Anspruch 1,
dadurch gekennzeichnet,
dass der Lastsensor (1) in vertikaler Richtung geneigt und/oder in horizontaler Richtung geschwenkt werden kann. - Verfahren nach Anspruch 1 oder 2,
dadurch gekennzeichnet,
dass der Lastsensor (1) in vertikaler Richtung in eine Position über oder unter das Niveau der Hubgabel (2) verfahrbar ist. - Verfahren nach einem der Vorstehenden Ansprüche,
dadurch gekennzeichnet,
dass zur Lasterkennung und -überwachung Entfernungsinformationen herangezogen werden. - Verfahren nach einem der Vorstehenden Ansprüche,
dadurch gekennzeichnet,
dass zur Lasterkennung und -überwachung visuelle Informationen herangezogen werden. - Verfahren nach einem der Vorstehenden Ansprüche,
dadurch gekennzeichnet,
dass zur Lasterkennung und -überwachung akustische Informationen herangezogen werden. - Bewegliche Lastsensor einrichtung (1) für die Lasterkennung und - überwachung an einem Gabelstapler,
wobei der Lastsensor (1) derart ausgerichtet ist, dass dieser die Last (3) und/oder die Hubgabel (2) und/oder die dem Gabelstapler vorausliegende Umgebung erfasst, und eine Rechnereinheit (4) zur Auswertung der mit dem. Lastsensor (1) erfassten Sensordaten vorgesehen ist, wobei der Lastsensor (1) derart gelagert ist, dass dieser bewegungsgleich mit dem Lastmittel (6) gegenüber dem Mast (5) des Gabelstaplers verfahrbar angeordnet ist und wobei ein Mittel vorgesehen ist, womit der Lastsensor (1) innerhalb eines fest vorgegebenen Bereichs in vertikaler Richtung relativ gegenüber dem Lastmittel (6) verfahrbar ist,
dadurch gekennzeichnet,
dass ein Mittel vorgesehen ist, womit der Lastsensor (1) zusätzlich in horizontaler Richtung in eine Position links oder rechts neben die Hubgabel (2) verfahrbar ist. - Sensoreinrichtung nach Anspruch 7,
dadurch gekennzeichnet,
dass der Lastsensor (1) in vertikaler Richtung geneigt und/oder in horizontaler Richtung geschwenkt werden kann. - Sensoreinrichtung nach Anspruch 7 oder 8,
dadurch gekennzeichnet,
dass ein Mittel vorgesehen ist, womit der Lastsensor (1) in vertikaler Richtung in eine Position über oder unter das Niveau der Hubgabel (2) verfahrbar ist. - Sensoreinrichtung nach einem der Ansprüche 7-9, dadurch gekennzeichnet,
dass es sich bei dem Lastsensor (1) um wenigstens einen Laserscanner handelt, - Sensoreinrichtung nach einem der Ansprüche 7 bis 10,
dadurch gekennzeichnet
dass es sich bei dem Last-sensor (1) um wenigstens einen Bildgebenden Sensor handelt. - Sensoreinrichtung nach einem der Ansprüche 7 bis 11,
dadurch gekennzeichnet,
dass es sich bei dem Lastsensor (1) um wenigstens einen Ultraschallsensor handelt.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE10323641A DE10323641A1 (de) | 2003-05-26 | 2003-05-26 | Bewegliche Sensoreinrichtung am Lastmittel eines Gabelstaplers |
| PCT/EP2004/004715 WO2004103882A1 (de) | 2003-05-26 | 2004-05-04 | Bewegliche sensoreinrichtung am lastmittel eines gabelstaplers |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1641704A1 EP1641704A1 (de) | 2006-04-05 |
| EP1641704B1 true EP1641704B1 (de) | 2009-10-21 |
Family
ID=33461871
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP04731005A Active EP1641704B1 (de) | 2003-05-26 | 2004-05-04 | Bewegliche sensoreinrichtung am lastmittel eines gabelstaplers |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20080011554A1 (de) |
| EP (1) | EP1641704B1 (de) |
| JP (1) | JP2006528122A (de) |
| AT (1) | ATE446276T1 (de) |
| DE (2) | DE10323641A1 (de) |
| WO (1) | WO2004103882A1 (de) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102022206053B3 (de) | 2022-06-15 | 2023-07-27 | Zf Friedrichshafen Ag | Vorrichtung zur Hinderniserkennung an einem Fahrzeug mit Hubvorrichtung und Verfahren zum Betreiben einer solchen Vorrichtung |
Families Citing this family (67)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102005016276A1 (de) * | 2005-04-08 | 2006-10-12 | Still Gmbh | Flurförderzeug mit einem vertikal beweglichen Gabelträger |
| DE102005043781A1 (de) * | 2005-09-14 | 2007-03-15 | Still Gmbh | Flurförderzeug mit einem im Bereich eines Hubgerüsts angeordneten Umgebungssensor |
| US20070213869A1 (en) * | 2006-02-08 | 2007-09-13 | Intermec Ip Corp. | Cargo transporter with automatic data collection devices |
| DE102006012205A1 (de) * | 2006-03-16 | 2007-09-20 | Still Gmbh | Flurförderzeug mit einem Hubmast |
| DE102006040197A1 (de) * | 2006-08-28 | 2008-03-06 | Jungheinrich Aktiengesellschaft | Steuersystem für Flurförderzeuge |
| US8970363B2 (en) * | 2006-09-14 | 2015-03-03 | Crown Equipment Corporation | Wrist/arm/hand mounted device for remotely controlling a materials handling vehicle |
| US20090184811A1 (en) * | 2008-01-23 | 2009-07-23 | Althoff Nicholas K | Methods and system for an impact avoidance system |
| DE102008008922B4 (de) | 2008-02-13 | 2023-07-06 | Still Gesellschaft Mit Beschränkter Haftung | Flurförderzeug mit Umgebungssensor |
| DE102008027695B4 (de) | 2008-04-20 | 2022-07-07 | Still Gesellschaft Mit Beschränkter Haftung | Verfahren für die Lagerungspositionsansteuerung bei Flurförderzeugen |
| BE1018160A3 (nl) * | 2008-05-26 | 2010-06-01 | Egemin Nv | Automatisch gestuurd voertuig en werkwijze voor het sturen daarbij toegepast. |
| DE102009004742A1 (de) * | 2009-01-15 | 2010-07-22 | Jungheinrich Ag | Gabelzinke für eine Lastgabel eines Flurförderzeugs |
| US9440591B2 (en) * | 2009-05-13 | 2016-09-13 | Deere & Company | Enhanced visibility system |
| CN102667035B (zh) * | 2009-11-02 | 2015-02-18 | 总锁有限责任公司 | 具有双重锁定机构的保险箱 |
| US8538577B2 (en) * | 2010-03-05 | 2013-09-17 | Crown Equipment Limited | Method and apparatus for sensing object load engagement, transportation and disengagement by automated vehicles |
| US9143843B2 (en) * | 2010-12-09 | 2015-09-22 | Sealed Air Corporation | Automated monitoring and control of safety in a production area |
| US7865286B1 (en) | 2010-05-01 | 2011-01-04 | Hall Walter D | Lift truck safety system |
| EP2385013A1 (de) * | 2010-05-03 | 2011-11-09 | Siemens Aktiengesellschaft | Flurförderzeug mit einer Einrichtung zur Lageüberwachung eines geladenen Transportgutes, und Verfahren zur Lageüberwachung eines geladenen Transportgutes eines Flurförderzeugs |
| EP2385014B1 (de) * | 2010-05-03 | 2013-03-27 | Siemens Aktiengesellschaft | Flurförderzeug mit einer Einrichtung zur Identifizierung eines geladenen Transportgutes, und Verfahren zur Identifizierung eines geladenen Transportgutes eines Flurförderzeugs |
| JP5139487B2 (ja) * | 2010-09-03 | 2013-02-06 | 新明工業株式会社 | フォークリフトの安全装置 |
| US8220169B2 (en) | 2010-09-11 | 2012-07-17 | Lawrence Auttlee Goddard | Method and system for guiding a plurality of load bearing members of a forklift |
| DE102012103364A1 (de) * | 2011-08-23 | 2013-02-28 | Still Gmbh | Flurförderzeug mit Hubhöhenmessung |
| US8718372B2 (en) | 2011-10-19 | 2014-05-06 | Crown Equipment Corporation | Identifying and evaluating possible horizontal and vertical lines intersecting potential pallet features |
| JP5908333B2 (ja) * | 2012-04-27 | 2016-04-26 | 株式会社日立製作所 | フォークリフト |
| DE102014100833B3 (de) * | 2014-01-24 | 2015-03-19 | Terex Mhps Gmbh | Automatisch geführtes Container-Portalhubgerät mit bewegbarer Sensoranordnung |
| EP3960693A1 (de) | 2014-09-15 | 2022-03-02 | Crown Equipment Corporation | Hubwagen mit optischer lastfühlerstruktur |
| EP3000773B1 (de) * | 2014-09-25 | 2017-04-12 | Toyota Material Handling Manufacturing Sweden AB | Verfahren in Gabelstapler zur Bestimmung einer Ladeposition in einem Ladegestell |
| EP3000771B1 (de) * | 2014-09-25 | 2017-11-22 | Toyota Material Handling Manufacturing Sweden AB | Gabelstapler |
| JP6469506B2 (ja) * | 2015-04-16 | 2019-02-13 | 株式会社豊田中央研究所 | フォークリフト |
| JP6542574B2 (ja) * | 2015-05-12 | 2019-07-10 | 株式会社豊田中央研究所 | フォークリフト |
| EP3309505A4 (de) * | 2015-06-11 | 2018-04-25 | Panasonic Intellectual Property Management Co., Ltd. | Dimensionsvermessungsvorrichtung und dimensionsvermessungsverfahren |
| US10202267B2 (en) | 2015-10-29 | 2019-02-12 | The Raymond Corporation | Systems and methods for sensing a load carried by a material handling vehicle |
| US10859998B2 (en) * | 2015-11-19 | 2020-12-08 | Vis Vires Ip, Llc | System, apparatus, and method for autonomous activation of an optical forklift alignment apparatus using sensors |
| US9990535B2 (en) | 2016-04-27 | 2018-06-05 | Crown Equipment Corporation | Pallet detection using units of physical length |
| CN105806563A (zh) * | 2016-05-17 | 2016-07-27 | 福建工程学院 | 石材矿山叉装车智能辅助作业装置及方法 |
| CN106044663B (zh) * | 2016-06-23 | 2018-12-18 | 福建工程学院 | 一种基于视觉技术的可测重石材矿山叉装车及其测重方法 |
| DE102016115033A1 (de) * | 2016-08-12 | 2018-02-15 | Universität Stuttgart | Fahrerlose Transportvorrichtung und Verfahren zur Navigation und Positionierung einer fahrerlosen Transportvorrichtung |
| WO2018052787A1 (en) | 2016-09-13 | 2018-03-22 | Walmart Apollo, Llc | System and methods for estimating storage capacity and identifying actions based on sound detection |
| US10070238B2 (en) | 2016-09-13 | 2018-09-04 | Walmart Apollo, Llc | System and methods for identifying an action of a forklift based on sound detection |
| DE102016119402A1 (de) * | 2016-10-12 | 2018-04-12 | Jungheinrich Aktiengesellschaft | Flurförderzeug mit einer 3D-Kamera |
| JP6451715B2 (ja) | 2016-10-14 | 2019-01-16 | 株式会社豊田自動織機 | フォークリフト |
| DE102016224766A1 (de) * | 2016-12-13 | 2018-06-14 | Robert Bosch Gmbh | Verfahren zur Kalibrierung von Sensoren an einer mobilen Plattform |
| US11142442B2 (en) | 2017-02-10 | 2021-10-12 | Arrow Acquisition, Llc | System and method for dynamically controlling the stability of an industrial vehicle |
| JP6972599B2 (ja) * | 2017-03-22 | 2021-11-24 | 日本電気株式会社 | 車載装置、荷役機、制御回路、制御方法、及びプログラム |
| JP6880884B2 (ja) * | 2017-03-22 | 2021-06-02 | 日本電気株式会社 | 車載装置、荷役機、制御回路、制御方法、及びプログラム |
| JP6724864B2 (ja) * | 2017-05-30 | 2020-07-15 | 株式会社豊田自動織機 | 荷役車両の前方確認装置 |
| FR3068025B1 (fr) * | 2017-06-27 | 2019-08-16 | Compagnie Generale Des Etablissements Michelin | Chariot elevateur comportant une butee de chargement |
| JP6606133B2 (ja) * | 2017-07-31 | 2019-11-13 | 本田技研工業株式会社 | 除雪機 |
| US10495733B2 (en) * | 2018-02-26 | 2019-12-03 | GM Global Technology Operations LLC | Extendable sensor mount |
| JP7210369B2 (ja) | 2018-04-27 | 2023-01-23 | 新明和工業株式会社 | 作業車両 |
| US11041956B2 (en) * | 2018-05-24 | 2021-06-22 | Toyota Motor Engineering & Manufacturing North America, Inc. | Lidar module and portable lidar scanner unit |
| US11641121B2 (en) | 2019-02-01 | 2023-05-02 | Crown Equipment Corporation | On-board charging station for a remote control device |
| EP4257406A3 (de) | 2019-02-01 | 2023-12-20 | Crown Equipment Corporation | Bordeigene ladestation für eine fernsteuerungsvorrichtung |
| JP2020160914A (ja) * | 2019-03-27 | 2020-10-01 | 株式会社豊田自動織機 | 物体検出装置 |
| JP2020196604A (ja) * | 2019-06-05 | 2020-12-10 | 村田機械株式会社 | 無人搬送車 |
| DE102019118756A1 (de) * | 2019-07-11 | 2021-01-14 | Jungheinrich Aktiengesellschaft | Flurförderzeug mit einem Montageelement für einen Sensor und Verfahren zur Positionierung eines Sensors eines Flurförderzeugs |
| CN110877876B (zh) * | 2019-11-04 | 2021-06-15 | 浙江华睿科技有限公司 | 栈板位置自动识别叉车 |
| FR3103941B1 (fr) | 2019-11-29 | 2022-06-03 | Balyo | Procede de determination de la position relative d’un prehenseur |
| JP6884247B1 (ja) * | 2020-03-11 | 2021-06-09 | 三菱ロジスネクスト株式会社 | 無人フォークリフト |
| CN114060653A (zh) * | 2020-08-10 | 2022-02-18 | 中强光电股份有限公司 | 升降机构及其操作方法 |
| KR20230050383A (ko) | 2020-08-11 | 2023-04-14 | 크라운 이큅먼트 코포레이션 | 원격 제어 장치 |
| US20220081271A1 (en) * | 2020-09-14 | 2022-03-17 | Lance A. Stacy | Motorized vehicles having sensors and methods of operating the same |
| JP7251906B2 (ja) * | 2021-05-11 | 2023-04-04 | 三菱ロジスネクスト株式会社 | コンテナ運搬車 |
| DE102021121224A1 (de) | 2021-08-16 | 2023-02-16 | Jungheinrich Aktiengesellschaft | Lastteil für autonom geführtes Flurförderzeug |
| DE102021004184A1 (de) * | 2021-08-17 | 2023-02-23 | Schiller Automatisierungstechnik Gmbh | Verfahren zum Betreiben eines Fördermittels |
| WO2023020940A1 (de) * | 2021-08-17 | 2023-02-23 | Schiller Automatisierungstechnik Gmbh | Verfahren zum betreiben eines fördermittels |
| US20230058101A1 (en) * | 2021-08-23 | 2023-02-23 | Brandon Michael West | Powered Industrial Truck (PIT) with Rear-Loading/Lifting Mechanism |
| WO2023192315A1 (en) * | 2022-03-28 | 2023-10-05 | Seegrid Corporation | Passively actuated sensor system |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SE7804927L (sv) * | 1978-04-28 | 1979-10-29 | Volvo Ab | Anordning for att orientera exempelvis ett lyftdon i forhallande till en last |
| JPH0615971Y2 (ja) * | 1987-12-15 | 1994-04-27 | 株式会社豊田自動織機製作所 | フォークリフトの前方確認装置 |
| JPH04256106A (ja) * | 1991-02-08 | 1992-09-10 | Toyota Autom Loom Works Ltd | 障害物検出装置 |
| SG52219A1 (en) * | 1992-08-28 | 1998-09-28 | Johann Hipp | Apparatus and method for controlling a container crane |
| US5586620A (en) * | 1995-05-12 | 1996-12-24 | Crown Equipment Corporation | Remote viewing apparatus for fork lift trucks |
| DE19613386A1 (de) * | 1996-04-03 | 1997-10-09 | Fiat Om Carrelli Elevatori | Flurförderzeug, das wahlweise manuell oder automatisch betreibbar ausgebildet ist |
| JP3129259B2 (ja) * | 1997-10-31 | 2001-01-29 | 株式会社豊田自動織機製作所 | 産業車両における車軸揺動制御方法及び車軸揺動制御装置 |
| US6150938A (en) * | 1998-09-09 | 2000-11-21 | Sower; Forrest D. | Laser lighting assembly mounted on a forklift to project a light beam parallel to and in the same plane as a fork and utilized to accurately direct the fork into a fork receiving volume of a pallet, thereby avoiding any fork damage to a load on a pallet |
| US6600418B2 (en) * | 2000-12-12 | 2003-07-29 | 3M Innovative Properties Company | Object tracking and management system and method using radio-frequency identification tags |
| DE60235963D1 (de) * | 2001-02-16 | 2010-05-27 | Toyoda Automatic Loom Works | Kamerahebevorrichtung und lasthandhabungstragvorrichtung eines hubwagens und hubwagen |
| US7219769B2 (en) * | 2001-07-17 | 2007-05-22 | Kabushiki Kaisha Toyota Jidoshokki | Industrial vehicle equipped with load handling operation control apparatus |
-
2003
- 2003-05-26 DE DE10323641A patent/DE10323641A1/de not_active Withdrawn
-
2004
- 2004-05-04 AT AT04731005T patent/ATE446276T1/de not_active IP Right Cessation
- 2004-05-04 EP EP04731005A patent/EP1641704B1/de active Active
- 2004-05-04 JP JP2006529734A patent/JP2006528122A/ja active Pending
- 2004-05-04 US US10/555,365 patent/US20080011554A1/en not_active Abandoned
- 2004-05-04 WO PCT/EP2004/004715 patent/WO2004103882A1/de active Application Filing
- 2004-05-04 DE DE502004010271T patent/DE502004010271D1/de active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102022206053B3 (de) | 2022-06-15 | 2023-07-27 | Zf Friedrichshafen Ag | Vorrichtung zur Hinderniserkennung an einem Fahrzeug mit Hubvorrichtung und Verfahren zum Betreiben einer solchen Vorrichtung |
Also Published As
| Publication number | Publication date |
|---|---|
| US20080011554A1 (en) | 2008-01-17 |
| ATE446276T1 (de) | 2009-11-15 |
| DE10323641A1 (de) | 2005-01-05 |
| DE502004010271D1 (de) | 2009-12-03 |
| JP2006528122A (ja) | 2006-12-14 |
| WO2004103882A1 (de) | 2004-12-02 |
| EP1641704A1 (de) | 2006-04-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1641704B1 (de) | Bewegliche sensoreinrichtung am lastmittel eines gabelstaplers | |
| EP1834922B1 (de) | Flurförderzeug mit einem Hubmast | |
| EP2851331B1 (de) | Verfahren zur Steuerung eines Kommissionierflurförderzeugs | |
| EP3000762B1 (de) | Verfahren zur automatischen, optischen Bestimmung einer Zielposition für ein Containergeschirr | |
| EP2574587B1 (de) | Verfahren zur Bestimmung einer Zielposition für ein Containergeschirr und Containergeschirr | |
| EP3587220B1 (de) | Fahrzeug mit rangiersystem | |
| EP2468678B1 (de) | Flurförderzeug mit einem Sensor zur Erfassung einer räumlichen Umgebung und Verfahren zum Betreiben eines solchen Flurförderzeugs | |
| DE10251910B4 (de) | Containerkran | |
| EP0656868B1 (de) | Vorrichtung und verfahren zur steuerung eines containerkranes | |
| WO2016120044A1 (de) | Vermessen einer abmessung auf einer oberfläche | |
| DE102012108034A1 (de) | Steuerungsverfahren für Flurförderzeug sowie Flurförderzeug | |
| EP3281077B1 (de) | Lage- und positionserkennung für eine fördereinrichtung | |
| DE102005043781A1 (de) | Flurförderzeug mit einem im Bereich eines Hubgerüsts angeordneten Umgebungssensor | |
| EP3453672A1 (de) | Verfahren und vorrichtung zur kollisionsvermeidung beim betrieb eines flurförderzeugs | |
| DE102012108028A1 (de) | Steuerverfahren für Lastabsetzung eines Flurförderzeugs sowie Flurförderzeug | |
| DE10323643B4 (de) | Sensorsystem für ein autonomes Flurförderfahrzeug | |
| DE19916999A1 (de) | Verfahren zur Bestimmung der Lage eines Fahrzeuges | |
| EP3224686B1 (de) | Fördereinheit und fördersystem zum fördern von ladungsträgern | |
| DE102020122900A1 (de) | Gabelstapler und Verfahren zur Erfassung einer Stellung eines Transportbehälters | |
| DE102004041938A1 (de) | Stapelgerät, insbesondere Reachstacker, und Verfahren zum Greifen und Stapeln von Containern | |
| DE10323642A1 (de) | Bildsensor für ein autonomes Flurförderfahrzeug mit großem Erfassungsbereich | |
| DE10202399A1 (de) | Einrichtung und Verfahren zur Positionierung von Transportfahrzeugen | |
| DE102017220359A1 (de) | Flurförderzeug mit an heb- und senkbaren Lastaufnahmemitteln angeordneten Kameras | |
| DE102013112016A1 (de) | Flurförderzeug mit einem Hubhöhenassistenzsystem | |
| DE102008058828B4 (de) | Verfahren und Vorrichtung zur Lokalisation eines mobilen Objekts |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20051122 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PL PT RO SE SI SK TR |
|
| DAX | Request for extension of the european patent (deleted) | ||
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: HORSTMANN, SVEN Inventor name: KUETTNER, LARS Inventor name: STOPP, ANDREAS Inventor name: BROESEL, RALF |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: DAIMLERCHRYSLER AG |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: DAIMLER AG |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| RAP2 | Party data changed (patent owner data changed or rights of a patent transferred) |
Owner name: STOPP, ANDREAS |
|
| REF | Corresponds to: |
Ref document number: 502004010271 Country of ref document: DE Date of ref document: 20091203 Kind code of ref document: P |
|
| NLT2 | Nl: modifications (of names), taken from the european patent patent bulletin |
Owner name: STOPP, ANDREAS Effective date: 20091118 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: PATENTANWAELTE SCHAAD, BALASS, MENZL & PARTNER AG |
|
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100201 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100222 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FD4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: IE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100121 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20100608 Year of fee payment: 7 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20100526 Year of fee payment: 7 |
|
| 26N | No opposition filed |
Effective date: 20100722 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100122 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20100525 Year of fee payment: 7 |
|
| BERE | Be: lapsed |
Owner name: DAIMLER A.G. Effective date: 20100531 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20100521 Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100531 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100531 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20110504 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110531 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110531 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 446276 Country of ref document: AT Kind code of ref document: T Effective date: 20110504 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20120131 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110504 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 502004010271 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110531 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R081 Ref document number: 502004010271 Country of ref document: DE Owner name: GOETTING KG, DE Free format text: FORMER OWNER: STOPP, ANDREAS, DR. ING., 15366 NEUENHAGEN, DE Effective date: 20120326 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110504 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100504 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100422 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20230531 Year of fee payment: 20 |