EP0941956B1 - Vorrichtung zum flexiblen Führen von transportierten Produkten - Google Patents
Vorrichtung zum flexiblen Führen von transportierten Produkten Download PDFInfo
- Publication number
- EP0941956B1 EP0941956B1 EP99101555A EP99101555A EP0941956B1 EP 0941956 B1 EP0941956 B1 EP 0941956B1 EP 99101555 A EP99101555 A EP 99101555A EP 99101555 A EP99101555 A EP 99101555A EP 0941956 B1 EP0941956 B1 EP 0941956B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- flexible
- guide
- flexible guide
- conveyed product
- signature
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 239000007788 liquid Substances 0.000 claims description 19
- 238000004140 cleaning Methods 0.000 claims description 11
- 229920001296 polysiloxane Polymers 0.000 claims description 7
- 238000000034 method Methods 0.000 claims description 6
- 239000000356 contaminant Substances 0.000 claims description 2
- 238000004804 winding Methods 0.000 claims 1
- 239000000463 material Substances 0.000 description 17
- 230000000694 effects Effects 0.000 description 4
- 238000007726 management method Methods 0.000 description 3
- 239000004677 Nylon Substances 0.000 description 2
- 238000007664 blowing Methods 0.000 description 2
- 238000005461 lubrication Methods 0.000 description 2
- 229920001778 nylon Polymers 0.000 description 2
- 238000007639 printing Methods 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000000254 damaging effect Effects 0.000 description 1
- 238000007598 dipping method Methods 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 230000002996 emotional effect Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 239000012535 impurity Substances 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H29/00—Delivering or advancing articles from machines; Advancing articles to or into piles
- B65H29/52—Stationary guides or smoothers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H29/00—Delivering or advancing articles from machines; Advancing articles to or into piles
- B65H29/68—Reducing the speed of articles as they advance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2404/00—Parts for transporting or guiding the handled material
- B65H2404/20—Belts
- B65H2404/25—Driving or guiding arrangements
- B65H2404/253—Relative position of driving and idler rollers
- B65H2404/2531—Relative position of driving and idler rollers for performing transport along a path curved according to an axis parallel to the transport surface
Definitions
- the present invention relates to a device for flexible guidance of transported flat products, especially printed products, if these from a folder to further processing stations.
- EP 0 662 439 B1 shows a pneumatic sheet guiding device in one Sheet printing machine, which is arranged along a sheet conveying path.
- the Pneumatic sheet guiding device comprises an upper part with blown air openings and an expandable lower portion which is peripherally connected to the upper portion.
- the upper and lower parts form an airtight cavity. Both parts are made of a flexible material, but the lower part is much more flexible than the upper part.
- the upper part is flexible and the lower part is in the way expandable that by blowing air in the formed between the two parts Cavity forms an air bubble that causes the lower part to bend changes.
- Document EP 0 490 272 describes a device for flexibly guiding transported Disclosed signatures from a feed mechanism into a stacking bin. Yourself in the path the flexible guides extending the signatures are on a receiving element as a support provided above the signature path. The flexible guides are fed through Signatures laid out from their rest position and exert a force on the surface the signature, if released by the feed mechanism, such that the Signature is pressed into the stacking tray below the path.
- the present invention provides a device for flexible management of transported products including a flexible one Create guidance to support signatures.
- the flexible management of the present Invention is able to deform to the time interval in which an impact occurs Extend signature to change direction.
- the leadership is on stored at least one support.
- the device for flexible guidance of transported products is particularly useful in delivery components of a Folders or in folders generally.
- the device according to the invention has the advantage that the signature applied Average impact can be reduced by the time interval in which the collision between the signature and the leadership takes place, is extended.
- the markup can be significantly weakened, because the collision of the signature with the leadership, the signature taking its direction changes, can take place at a longer interval.
- the flexible Leadership can be either stationary or dynamic. Both types of leadership can deform to impact force when the signature hits the guide to absorb.
- the stationary flexible guide can be curved Deform length. The deformation of the flexible guide can still be favored by placing it between two supports, each on a different level are arranged.
- flexible guidance can be any desired Form and width, they can also be the width of the signature or a larger width exhibit. Between the signature and an impervious surface of the flexible Leadership can form a natural cushion of air.
- the flexible leadership can also work out permeable material to be constructed so that compressed air through the flexible guide can be blown to promote the formation of an air cushion.
- the Device according to the invention not as a stationary flexible guide, but as an endless loop arranged in the direction of the respective signature emotional. With this construction, no shear forces develop between the signature and flexible leadership. If the speeds of the signature and the dynamic flexible guidance are adapted to each other so that no difference exists, a more even signature management is achieved with the shear forces excluded are.
- the dynamic flexible guide is as a closed loop constructed and can be supported by roller-shaped supports, so that a Relative movement of the guide with respect to the support rollers is possible. For the movement
- the dynamic flexible guide can be at least one drive station be assigned. In one embodiment of the invention, the drive station Press rolls on that cooperate with each other by dynamic dynamic guidance wind along their path of movement.
- the device and the method according to the present invention can be a Liquid application station include where a liquid, e.g. B. silicone is applied, to reduce the friction factor and consequently prevent lubrication points. It Antistatic liquids can also be applied, which are static Reduce the attraction between the guide and the signatures. At long last a cleaning station can be assigned to the dynamic flexible guide in order to Remove impurities from the surface of the dynamic flexible guide and permanently prevent color build-up.
- a liquid e.g. B. silicone
- Antistatic liquids can also be applied, which are static Reduce the attraction between the guide and the signatures.
- a cleaning station can be assigned to the dynamic flexible guide in order to Remove impurities from the surface of the dynamic flexible guide and permanently prevent color build-up.
- a method for the creation of a flexible guide represented by at least one prop is worn and deformed by the addition of a signature, so that the Period in which the direction change of the signature takes place is extended and thus the forces acting on the signature on average are reduced.
- the dynamic flexible guidance can be driven in such a way that the Speed difference between the signature and the dynamic flexible guidance is minimized.
- FIGS. 1A and 1B show a conventional stationary guide 4 on which one Signature 1 is promoted.
- a respective signature 1 has a leading edge 2 and a Trailing edge 3 and moves in the direction indicated by arrow 6.
- the rear edge 3 of the signature 1 swings due to the centripetal or approach forces outwards until it contacts the stationary guide 4.
- this will make the Signature 1 is subjected to a force such that the signature 1 adapts to the shape of the adapts stationary guide 4.
- one Guide 4 becomes a very fast and strongly increasing force on the signature 1 exercised, which can damage the latter.
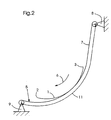
- Fig. 2 shows a stationary attached flexible guide 7 according to a Embodiment of the present invention.
- a signature is with your Leading edge 2 by a delay drum on one of several arms (Not shown) attached gripping element is held, guided in the direction 6.
- This can e.g. B. may be a delay current as disclosed in US 5,452,886. It an axis about which the deceleration drum rotates can be selected so that during the rotary movement the gripping elements follow a path that is in one predetermined distance from the surface of the flexible guide. Since the Front edge is held by the gripping element, this does not hit the flexible Guide 7 when the signature slows down as it moves in that direction becomes. However, the body of the signature 1 resonates due to the centripetal forces outside and hits on the stationary flexible guide 7.
- the flexible guide 7 is between an upper support 8 and a lower support 9 arranged.
- the supports 8 and 9 are each on different levels.
- the flexible guide 7 moves into an arcuate position due to gravity.
- the arc length between the two supports 8 and 9 is 11 designated.
- the flexible guide 7 deforms on contact with a respective one Signature 1, so that signature 1 is granted more time, in accordance with its impulse to transmit an average force to the flexible guide 7 (i.e. that the The time interval of the service is extended and thus the average force for one given momentum is reduced).
- the shape of the flexible guide 7, which is between the two supports 8, 9 hanging hanging, can be changed by changing the length of the flexible Guide 7 can be varied.
- the freely hanging arcuate length 11 of the two supports 8, 9 Guide 7 influences the deformation and consequently the contact forces exerted thereon. Furthermore, the degree of deformation and thus the degree of elongation of the Time interval by choosing a material for the guide that is the most suitable Possesses properties, be changed. A guide from a lighter, more flexible Material will adapt more easily to the shape of the signature 1 to be kept, whereas a guide made of a heavier, less flexible material causes the signature, react faster to serve 7 when serving.
- Fig. 3 shows a dynamic flexible guide 12, which is in a closed loop is arranged with assigned drive stations.
- the flexible guide 12 is mounted on a plurality of support rollers 14.
- the Rollers can each be arranged on supports 15, 16.
- the flexible guide 12 that is designed as a closed loop moves into one through the arrow 13 indicated direction, which corresponds to the direction of movement of the signature 1.
- the closed loop is assigned at least one drive station 17, 23 to the flexible guide 12 to move the rollers 14 at a speed that the Speed of the signature can be adjusted so that a Speed difference between the signatures 1 and the surface of the flexible Leadership 12 can be avoided.
- the elimination of a speed difference between the signatures moved at a distance and the speed of the Guide prevents lubrication points on the signatures and ensures one smooth signature transport.
- the flexible guide 12 can have two drive stations 17 and 23 according to the invention be equipped.
- the drive station 17 is the lower end of the flexible guide 12 assigned after the latter has rotated around the roller 14, and the Drive station 23 is assigned to the upper end of flexible guide 12.
- a additional tension roller 14 can be arranged in the lower right corner, which the flexible guide 12 between the drive stations 17 and 23 spans and the shape of the flexible guide 12 on the arcuate portion of their career is not affected.
- the drive stations 17 and 23 can each comprise a pair of press rolls 18, 19, who cooperate with each other.
- the press roll 19 rotates in the direction 20 and Press roll 18 rotates in the direction 21.
- Both drive stations 17 and 23 for the flexible guide 12 are operated synchronously so that it is moved continuously.
- the material properties of the flexible guide 12 determine the degree the deformation of the flexible guide 12.
- a light, flexible material fits the The shape of the signature is lighter and a heavy, less flexible material forces it Signature to adapt to leadership more quickly.
- the material can be permeable (i.e., it can be made from a plurality of spaced strips, e.g., nylon or consist of a flexible grid) or it can be impermeable (i.e. it can Bow of a fabric-like material such as nylon).
- anyone can use this material desired width, it can also be wider than the signature or as wide as these be.
- a signature 1 can be gripped by a gripping member (not shown) on its leading edge 2 and moved by a deceleration drum (not shown) to move along the flexible guide 12 according to the present invention.
- the flexible guide 12 assumes an arcuate shape while being moved at the same speed as the signature 1.
- the impact force to which a signature received by the flexible guide 12 is exposed corresponds to an impulse force which is equal to 1 F average x ⁇ t (ie the product of an average force (F average ) multiplied by the time interval of the impact ( ⁇ t)).
- F average average force
- ⁇ t time interval of the impact
- the degree of deformation of the flexible guides 7 and 12 depends for example on the properties of the selected material for these guides.
- a design of the flexible guide 12 in a width that the width of the corresponds to the respective signature to be conveyed 1 or is wider than this and at Using an impervious material for the guide becomes a natural one Air cushion created between the surface of the flexible guide and the signature 1.
- additional air can be blown into the area between by means of a fan 34 the signature and the guide 7 are introduced.
- the surface of the flexible guide 12 and the signature 1 so there is trapped air, so that thereby a direct contact between the surfaces of the signature 1 and the flexible Leadership 12 is avoided.
- the guide can be made of an impermeable Material that has a selected number of air holes 37, or from one permeable material.
- the air between the moving Signature 1 and the surface of the flexible guide 12 can by means of a Blower device 35 are pressed out through the permeable surface, the Blowing device 35 via an optionally created guide channel 36 with a cavity communicates with the guide and the cavity except for the air holes 37 is airtight.
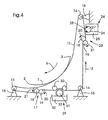
- Fig. 4 shows a further embodiment of the dynamic according to the invention 3, which is a liquid application station 24 and a Includes cleaning station, which are integrated into the track of the flexible guide 12.
- the liquid application station 24 has a liquid container 26 which, for. B. liquid Contains silicone 25.
- the Significant coefficient of friction By applying silicone before a signature 1 the surface of the flexible Guide 12 contacted at high speeds, the Significant coefficient of friction. At high speeds processed signatures the generated air cushion between the signature 1 and the Surface of the flexible guide 12 is not sufficient to prevent direct contact. Thus, the effects of direct contact between the signature and the flexible guide 12 minimized by reducing the coefficient of friction. This is, however, more important for a stationary flexible guide 7, as shown in FIG. 2, than for a dynamic flexible guide 12 which is driven and in which none Differences in speed occur.
- the liquid application station 24 is behind one upper drive station 23 arranged to a freshly applied, very thin To produce coating of the surface of the flexible guide 12.
- an antistatic solution within the Liquid application station 24 can be used to increase the static attraction between the two moving elements, namely the signature 1 and the to reduce flexible guidance 12.
- a cleaning station 29 is located at the lower end of the flexible guide 12, after it has passed a lower drive station 17.
- the cleaning station 29 comprises two guide rollers 30 which deform the flexible guide 12 so that one sufficient contact length is guaranteed along the surface of the flexible Guide 12 can be cleaned by means of a cleaning brush 31 or the like.
- the Cleaning brush 31 is assigned to a container 32 which is a cleaning solution contains to remove contaminants on the surface of the flexible To facilitate leadership 12.
- the present invention also discloses a method for guiding transported Products.
- the flexible guides 7 and 12, as shown in Figs. 2-4, are carried by at least one support 8, 15 and the material properties are so chosen that the flexible guides 7, 12 are deformable to the time interval of To extend the surcharge for a respective signature 1. Doing so will be strong Contact forces that occur during the collision between two moving bodies exercised and directed towards the leadership, eliminated.
- the flexible guide 12 is driven such that no speed differences between the signatures 1 and the surface the flexible guide 12 arise. Thus, shear forces are between themselves moving bodies eliminated or significantly reduced.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Feeding Of Articles By Means Other Than Belts Or Rollers (AREA)
- Discharge By Other Means (AREA)
- Separation, Sorting, Adjustment, Or Bending Of Sheets To Be Conveyed (AREA)
Description
- Fig. 1A und 1B
- jeweils eine perspektivische und eine Seitenansicht einer herkömmlichen ortsfesten Führung;
- Fig. 2
- eine Seitenansicht einer stationär angebrachten flexiblen Führung gemäß einem Ausführungsbeispiel der vorliegenden Erfindung;
- Fig. 3
- eine Seitenansicht einer dynamischen flexiblen Führung, die in einer geschlossenen Schlaufe angeordnet ist und zugeordnete Antriebsstationen gemäß einem Ausführungsbeispiel der vorliegenden Erfindung aufweist; und
- Fig. 4
- eine Seitenansicht einer dynamischen flexiblen Führung mit einer Flüssigkeitsauftragstation sowie einer Reinigungsstation für die Oberfläche der flexiblen Führung gemäß einem Ausführungsbeispiel der vorliegenden Erfindung.
- 1
- Signatur
- 2
- Vorderkante der Signatur
- 3
- Hinterkante der Signatur
- 4
- stationäre Führung
- 6
- Pfeil
- 7
- stationäre flexible Führung
- 8
- Stütze
- 9
- Stütze
- 11
- bogenförmige Länge der Führung 7
- 12
- dynamische flexible Führung
- 13
- Richtungspfeil
- 14
- Stützwalzen, Spannwalze
- 15
- Träger
- 16
- Träger
- 17
- Antriebsstation (Fig. 3)
- 18
- Preßwalze
- 19
- Preßwalze
- 20
- Drehrichtung der Preßwalze 19
- 21
- Drehrichtung der Preßwalze 20
- 23
- Antriebsstation
- 24
- Flüssigkeitsauftragstation
- 25
- flüssiges Silikon
- 26
- Flüssigkeitsbehälter
- 27
- Tauchwalze
- 29
- Reinigungsstation
- 30
- Führungswalzen
- 31
- Reinigungsbürste
- 32
- Reinigungslösungsbehälter
- 34
- Gebläse
- 35
- Blaseinrichtung
- 36
- Leitkanal
- 37
- Luftlöcher
Claims (19)
- Vorrichtung zum flexiblen Führen von transportierten Produkten, mit einer flexiblen Führung (7, 12), die zwischen einer oberen Stütze (8,14) und einer unteren Stütze (9,14) eine bogenförmige Länge (11) aufweist und die ein transportiertes Produkt (1), welches an seiner Vorderkante (2) mittels eines Greifelementes gehalten wird, stützt,
dadurch gekennzeichnet, dass die flexible Führung (7, 12) während eines Zusammenstoßes zwischen sich und dem transportierten Produkt (1) verformbar ist, um einen Zeitabstand, in dem die flexible Führung (7, 12) mit dem transportierten Produkt (1) in Kontakt ist, zu verlängern. - Vorrichtung zum flexiblen Führen nach Anspruch 1,
dadurch gekennzeichnet, dass die flexible Führung (7, 12) eine stationäre Führung ist. - Vorrichtung zum flexiblen Führen nach Anspruch 1,
dadurch gekennzeichnet, dass die flexible Führung (7, 12) eine sich bewegende Führung ist. - Vorrichtung zum flexiblen Führen nach Anspruch 2,
dadurch gekennzeichnet, dass für die Verformung der flexiblen Führung (7) die bogenförmige Länge (11) derselben gewählt wird. - Vorrichtung zum flexiblen Führen nach Anspruch 1,
dadurch gekennzeichnet, dass die flexible Führung (7, 12) eine mit der Breite des transportierten Produktes (1) identische Breite aufweist oder breiter als dieses ist, so dass sich ein Luftkissen zwischen der undurchlässigen Oberfläche der Führung (7, 12) und dem transportierten Produkt (1) bilden kann. - Vorrichtung zum flexiblen Führen nach Anspruch 1,
dadurch gekennzeichnet, dass die flexible Führung (7, 12) durchlässig ist, so dass mittels Druckluft ein Luftkissen zwischen der durchlässigen Führungsfläche (7, 12) und dem transportierten Produkt (1) gebildet werden kann. - Vorrichtung zum flexiblen Führen nach Anspruch 3,
dadurch gekennzeichnet, dass die flexible Führung (12) eine endlose Schlaufe ist, die sich in der Richtung (6) des transportierten Produktes (1) bewegt. - Vorrichtung zum flexiblen Führen nach Anspruch 3,
dadurch gekennzeichnet, dass die flexible Führung (12) als endlose Schlaufe mit einer Oberflächengeschwindigkeit angetrieben wird, die in etwa die Geschwindigkeit des transportierten Produktes (1) ist. - Vorrichtung zum flexiblen Führen nach Anspruch 3,
dadurch gekennzeichnet, dass die flexible Führung (12) eine geschlossene Schlaufe und auf als Walzen (14) ausgebildeten Stützen (15, 16) angebracht ist. - Vorrichtung zum flexiblen Führen nach Anspruch 3,
dadurch gekennzeichnet, dass die flexible Führung (12) von mindestens einer Antriebsstation (17, 23) angetrieben wird. - Vorrichtung zum flexiblen Führen nach Anspruch 10,
dadurch gekennzeichnet, dass die mindestens eine Antriebsstation (17, 23) miteinander kooperierende Presswalzen (20, 21) umfasst, durch die die flexible Führung (12) in die Bewegungsrichtung des transportierten Produktes (1) gewunden wird. - Vorrichtung zum flexiblen Führen nach Anspruch 3,
dadurch gekennzeichnet, dass die flexible Führung (12) eine Flüssigkeitsauftragstation (24) passiert, durch die eine Flüssigkeit auf die Oberfläche der flexiblen Führung (12) aufgetragen wird. - Vorrichtung zum flexiblen Führen nach Anspruch 3,
dadurch gekennzeichnet, dass die flexible Führung (12) eine Reinigungsstation (29) passiert, durch die Verunreinigungen von der Oberfläche der flexiblen Führung (12) entfernt werden. - Vorrichtung zum flexiblen Führen nach Anspruch 13,
dadurch gekennzeichnet, dass die aufgetragene Flüssigkeit eine Silikonlösung ist. - Vorrichtung zum flexiblen Führen nach Anspruch 14,
dadurch gekennzeichnet, dass die aufgetragene Flüssigkeit eine antistatische Lösung ist. - Vorrichtung zum flexiblen Führen nach Anspruch 13,
dadurch gekennzeichnet, dass das transportierte Produkt (1) eine bedruckte Signatur ist. - Falzapparat,
gekennzeichnet durch
eine Vorrichtung zum flexiblen Führen von transportieren Produkten gemäß Anspruch 1. - Verfahren zum Führen eines transportierten Produktes (1) mit den folgenden Schritten:gekennzeichnet durchHalten des transportierten Produktes (1) an seiner Vorderkante (2) mittels eines Greifelementes;Stützen einer flexiblen Führung (7,12) mit einer oberen Stütze (8,14) und einer unteren Stütze (9,14) in einer bogenförmigen Position; undBefördern des transportieren Produktes (1) zur flexiblen Führung (7,12);
Verlängern des Zeitabstandes, in dem die flexible Führung (7, 12) mit dem transportierten Produkt (1) in Kontakt ist, für die Richtungsänderung des transportierten Produktes (1) mittels einer Verformung der flexiblen Führung (7,12). - Verfahren zum Führen eines transportierten Produktes (1) nach Anspruch 18,
gekennzeichnet durch
Bewegen der flexible Führung (12) in einer geschlossenen Schlaufe und Antreiben der flexiblen Führung (12) derart, dass eine Geschwindigkeitsdifferenz zwischen dem transportierten Produkt (1) und der flexiblen Führung (12) minimiert ist.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US42009 | 1998-03-13 | ||
| US09/042,009 US6145649A (en) | 1998-03-13 | 1998-03-13 | Device for flexible guiding of conveyed products |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0941956A1 EP0941956A1 (de) | 1999-09-15 |
| EP0941956B1 true EP0941956B1 (de) | 2002-12-04 |
Family
ID=21919563
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP99101555A Expired - Lifetime EP0941956B1 (de) | 1998-03-13 | 1999-02-01 | Vorrichtung zum flexiblen Führen von transportierten Produkten |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US6145649A (de) |
| EP (1) | EP0941956B1 (de) |
| DE (2) | DE59903614D1 (de) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19735051C2 (de) * | 1997-08-13 | 1999-06-17 | Koenig & Bauer Ag | Vorrichtung zum Aufteilen eines Stromes von Signaturen |
| DE19952528A1 (de) * | 1999-10-30 | 2001-05-03 | Roland Man Druckmasch | Reinigungsvorrichtung für eine Bogenleiteinrichtung einer Rotationsdruckmaschine |
| US6874615B2 (en) * | 2003-06-06 | 2005-04-05 | David M Fallas | Conveyor chute |
| CN113302668B (zh) * | 2019-01-17 | 2023-05-26 | 富士通先端科技株式会社 | 纸张类处理装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1395539A (fr) * | 1963-03-29 | 1965-04-16 | Cefilac | Dispositif pour enrober de poudre lubrifiante, avant filage ou perçage, des billettes chaudes de forme quelconque |
| US3416679A (en) * | 1967-01-16 | 1968-12-17 | Stobb Inc | Signature feeder |
| US4227875A (en) * | 1978-09-12 | 1980-10-14 | Calcimatic International Limited | Rotary hearth for calcining kiln |
| JPS5721164A (en) * | 1980-07-14 | 1982-02-03 | Hitachi Ltd | Facsimile device |
| DE3108681A1 (de) * | 1981-03-07 | 1982-09-30 | M.A.N.- Roland Druckmaschinen AG, 6050 Offenbach | "einrichtung zur entnahme von druckexemplaren aus den schaufelraedern eines falzapparates" |
| DD225412A1 (de) * | 1984-06-27 | 1985-07-31 | Polygraph Leipzig | Stapelauslage fuer hochkant gestapelte falzbogen |
| DE4039813C2 (de) * | 1990-12-13 | 1997-03-13 | Kodak Ag | Leitvorrichtung für die gestapelte Ablage von Papierblättern |
| DE4041692C1 (de) * | 1990-12-24 | 1992-04-02 | Johann 8391 Sonnen De Binder | |
| US5452886A (en) * | 1993-08-09 | 1995-09-26 | Heidelberger Druckmaschinen Ag | Device for slowing down signatures in a folding machine |
| US5355992A (en) * | 1993-10-15 | 1994-10-18 | Utility Technical Services, Inc. | Belt cleaning apparatus |
| DE4344040C1 (de) * | 1993-12-23 | 1995-03-23 | Kba Planeta Ag | Pneumatische Bogenleiteinrichtung |
| US5544733A (en) * | 1994-09-30 | 1996-08-13 | Jervis B. Webb Company | Wheeled luggage tipper |
| US5613594A (en) * | 1995-08-10 | 1997-03-25 | Stein, Inc. | Conveyor belt treatment apparatus |
| US5641263A (en) * | 1996-01-19 | 1997-06-24 | Vulcan Tool Corporation | Bundle unscrambler |
-
1998
- 1998-03-13 US US09/042,009 patent/US6145649A/en not_active Expired - Fee Related
-
1999
- 1999-02-01 DE DE59903614T patent/DE59903614D1/de not_active Expired - Fee Related
- 1999-02-01 DE DE19903888A patent/DE19903888A1/de not_active Withdrawn
- 1999-02-01 EP EP99101555A patent/EP0941956B1/de not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| DE59903614D1 (de) | 2003-01-16 |
| US6145649A (en) | 2000-11-14 |
| EP0941956A1 (de) | 1999-09-15 |
| DE19903888A1 (de) | 1999-09-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE2552998C2 (de) | Bogenausleger für Rotationsdruckmaschinen | |
| EP1595836B1 (de) | Vorrichtung zur Verarbeitung von Stapeln aus elektrostatisch aufladbaren Flachteilen | |
| DE2643709A1 (de) | Sortiervorrichtung fuer ungeordnet verteiltes stueckgut | |
| DE2658294C2 (de) | Vorrichtung zum Vereinzeln und Zuführen von mit Haltebändern in einer Schuppenbandrolle gespeicherten flachen Gegenständen zu nachfolgenden Stationen | |
| EP0579057A1 (de) | Drehvorrichtung für Papierbogen in einer Förderbahn | |
| EP1036752B1 (de) | Verfahren und Vorrichtung zum Vereinzeln flächiger Güter | |
| EP0941956B1 (de) | Vorrichtung zum flexiblen Führen von transportierten Produkten | |
| CH715936A1 (de) | Verfahren zum Entladen von Transportgut aus einer seitlich offenen Transporttasche, welche an einem Laufwagen hängend das Transportgut entlang einer Laufschiene in einer Förderrichtung fördert. | |
| DE69814202T2 (de) | Aufrolleinrichtung | |
| EP0767120B1 (de) | Bogenleiteinrichtung für Bogenanleger | |
| DE69912706T2 (de) | Führungsanordnung für bogenförmiges Material in einer Offsetdruckmaschine | |
| DE19856372A1 (de) | Bogentransportband | |
| EP3305691A1 (de) | Fördersystem mit führungsvorrichtung | |
| DE2232610A1 (de) | Ketteneinrichtung zu einer foerderanlage fuer papierverarbeitende betriebe | |
| DE10059004A1 (de) | Vorrichtung zur Erzeugung eines Versatzes von transportiertem biegsamen flächigen Gut | |
| DE19541278C2 (de) | Stapelvorrichtung für kartenförmige Güter | |
| DE3426063A1 (de) | Vorrichtung zum abwickeln von stoff | |
| DE60318739T2 (de) | Verfahren und vorrichtung zur handhabung von walzen | |
| DE4035357A1 (de) | Drucker | |
| EP0283834B1 (de) | Vorrichtung zum Anbringen einer den Anfang eines bandförmigen Materials führenden Klammer an ein Schleppband | |
| DE3937044A1 (de) | Vorrichtung zum aufbringen von deckblaettern auf blattstapel | |
| DE3725833A1 (de) | Vorrichtung zum auftragen von klebstoff auf blattfoermiges verpackungsmaterial | |
| EP1029816B1 (de) | Verfahren und Vorrichtung zum Drehen eines Gegenstandes, insbesondere zum Drehen einer quaderförmingen Faltschachtel | |
| EP1241119B1 (de) | Einrichtung zur Förderung von Bogen | |
| CH672761A5 (de) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): CH DE FR GB IT LI NL |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| 17P | Request for examination filed |
Effective date: 19990915 |
|
| AKX | Designation fees paid |
Free format text: CH DE FR GB IT LI NL |
|
| 17Q | First examination report despatched |
Effective date: 20010528 |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): CH DE FR GB IT LI NL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20021204 Ref country code: FR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20021204 |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REF | Corresponds to: |
Ref document number: 59903614 Country of ref document: DE Date of ref document: 20030116 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20030224 Year of fee payment: 5 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20030304 Year of fee payment: 5 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20030306 Year of fee payment: 5 |
|
| GBV | Gb: ep patent (uk) treated as always having been void in accordance with gb section 77(7)/1977 [no translation filed] |
Effective date: 20021204 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| EN | Fr: translation not filed | ||
| 26N | No opposition filed |
Effective date: 20030905 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20040229 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20040229 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20040901 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20040901 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| NLV4 | Nl: lapsed or anulled due to non-payment of the annual fee |
Effective date: 20040901 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20050201 |