EP0647553B1 - Führungssystem und Verfahren zur Steuerung der Querneigung an einem Schienenfahrzeug - Google Patents
Führungssystem und Verfahren zur Steuerung der Querneigung an einem Schienenfahrzeug Download PDFInfo
- Publication number
- EP0647553B1 EP0647553B1 EP94119183A EP94119183A EP0647553B1 EP 0647553 B1 EP0647553 B1 EP 0647553B1 EP 94119183 A EP94119183 A EP 94119183A EP 94119183 A EP94119183 A EP 94119183A EP 0647553 B1 EP0647553 B1 EP 0647553B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- lateral inclination
- rail vehicle
- vehicle
- output
- adjusting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61F—RAIL VEHICLE SUSPENSIONS, e.g. UNDERFRAMES, BOGIES OR ARRANGEMENTS OF WHEEL AXLES; RAIL VEHICLES FOR USE ON TRACKS OF DIFFERENT WIDTH; PREVENTING DERAILING OF RAIL VEHICLES; WHEEL GUARDS, OBSTRUCTION REMOVERS OR THE LIKE FOR RAIL VEHICLES
- B61F5/00—Constructional details of bogies; Connections between bogies and vehicle underframes; Arrangements or devices for adjusting or allowing self-adjustment of wheel axles or bogies when rounding curves
- B61F5/02—Arrangements permitting limited transverse relative movements between vehicle underframe or bolster and bogie; Connections between underframes and bogies
- B61F5/22—Guiding of the vehicle underframes with respect to the bogies
Description
- Fig. 1
- in Form eines vereinfachten Signalfluss/Funktionsblockdiagrammes eine erste mögliche Form des erfindungsgemässen Führungssystems, welches nach dem erfindungsgemässen Verfahren an einem erfindungsgemässen Schienenfahrzeug arbeitet;
- Fig. 2
- in Darstellung analog zu derjenigen von Fig. 1 eine bevorzugte Ausführungsform des erfindungsgemässen Führungssystems;
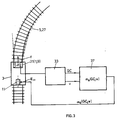
- Fig. 3
- anhand eines vereinfachten Funktionsblock/Signalflussdiagrammes eine weitere Realisationsform der Erfindung, bei der der Schienenzug für ein Schienenfahrzeug selbst als inhärenten Speicher eingesetzt wird;
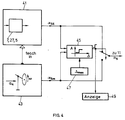
- Fig. 4
- anhand eines vereinfachten Funktionsblock/Signalflussdiagrammes eine Weiterentwicklung des erfindungsgemässen Systems mit Zusatz eines Redundanzsystems;
- Fig. 5
- schematisch eine Implementierung zweier erfindungsgemässer Führungssysteme als Master und Slave, als bevorzugte Realisationsform redundanter Systeme.
Claims (13)
- Führungssystem, umfassendmindestens ein Schienenfahrzeug (3) mit in Querrichtung schwenkbar gelagertem Lastboden (13) und einer Stelleinrichtung (11) für die Einstellung des Lastbodens (13) gemäss einem Querneigungswinkel, der über mindestens ein Querneigungs-Stellsignal (αS, αSE, αSm) eingestellt wird,eine Stellersteuerung, die in Funktion der Beschleunigung, die auf eine Last wirkt, auf die Stelleinrichtung (11) so wirkt, dass der Winkel zwischen Lastbodensenkrechter und Beschleunigungsrichtung verringert wird,eine Positionserfassungseinrichtung (1) für die Erfassung der Schienenfahrzeug-IST-Position (POS),eine IST-Geschwindigkeitsermittlungseinheit (9) für die Ermittlung der Schienenfahrzeug-IST-Geschwindigkeit (vIST),eine Speichereinrichtung (7) zur Erzeugung eines ersten Querneigungs-Stellsignals (αS, αSE),
dadurch gekennzeichnet,dass am Schienenfahrzeug (3) mindestens eine messtechnische Querbeschleunigungs-Erfassungseinrichtung als Behelfssystem (43) zur Ermittlung eines zweiten Querneigungs-Stellsignals (αSm) vorgesehen ist unddass eine Vergleichseinrichtung (45) vorgesehen ist,
wobei der Ausgang der Positionserfassungseinrichtung (1) und der Ausgang der Geschwindigkeitsermittlungseinrichtung (9) je auf einen Ausgabewahleingang der Speichereinrichtung (7) zur Erzeugung des ersten Querneigungs-Stellsignals (αS, αSE) wirken und wobei der Ausgang der Speichereinrichtung (7) und der Ausgang des Behelfssystems (43) auf die Vergleichseinrichtung (45) wirken, deren Ausgang auf die Stelleinrichtung (11) wirkt wobei in Betrieb die Vergleichseinrichtung (45) entweder den Ausgang der Speichereinrichtung (7) oder den Ausgang des Behelfssystems (43) auf die Stelleinrichtung (11) wirksam schaltet. - Führungssystem, umfassendmindestens ein Schienenfahrzeug (3) mit in Querrichtung schwenkbar gelagertem Lastboden (13) und einer Stelleinrichtung (11) für die Einstellung des Lastbodens (13) gemäss einem Querneigungswinkel, der über mindestens ein Querneigungs-Stellsignal (αS, αSE, αSm) eingestellt wird,eine Stellersteuerung, die in Funktion der Beschleunigung, die auf eine Last wirkt, auf die Stelleinrichtung (11) so wirkt, dass der Winkel zwischen Lastbodensenkrechter und Beschleunigungsrichtung verringert wird,eine Positionserfassungseinrichtung (1) für die Erfassung der Schienenfahrzeug-IST-Position (POS),eine IST-Geschwindigkeitsermittlungseinheit (9) für die Ermittlung der Schienenfahrzeug-IST-Geschwindigkeit (vIST),eine Speichereinrichtung (27),eine Recheneinheit (29) zur Erzeugung eines ersten Querneigungs-Stellsignals (αS, αSE),
dadurch gekennzeichnet,dass am Schienenfahrzeug (3) mindestens eine messtechnische Querbeschleunigungs-Erfassungseinrichtung als Behelfssystem (43) zur Ermittlung eines zweiten Querneigungs-Stellsignals (αSm) vorgesehen ist unddass eine Vergleichseinrichtung (45) vorgesehen ist,
wobei der Ausgang der Positionserfassungseinrichtung (1, 31) auf einen Ausgabewahleingang der Speichereinrichtung (27) wirkt, deren Ausgang mit demjenigen der Geschwindlgkeitsermittlungseinrichtung (9) auf die Recheneinheit (29) zur Erzeugung des ersten Querneigungs-Stellsignals (αS, αSE) wirkt, und wobei der Ausgang der Recheneinheit (29) und der Ausgang des Behelfssystems (43) auf die Vergleichseinrichtung (45) wirken, deren Ausgang auf die Stelleinrichtung (11) wirkt, wobei in Betrieb die Vergleichseinrichtung (45) entweder den Ausgang des Speichereinrichtung (7) oder den Ausgang des Behelfssystems (43) auf die Stelleinrichtung (11) schaltet. - System nach einem der Ansprüche 1 oder 2, dadurch gekennzeichnet, dass die Vergleichseinrichtung (45) eines der Querneigungs-Stellsignale (αS, αSE, αSm) auf die Stelleinrichtung (11) wirksam schaltet.
- System nach einem der vorangehenden Ansprüche, dadurch gekennzeichnet, dass die Positionserfassungseinrichtung (1) eine Synchronisationseinrichtung zur Synchronisation der erfassten Schienenfahrzeugposition (POS) mit der physikalischen IST-Position des Schienenfahrzeuges umfasst.
- System nach einem der Ansprüche 1 bis 4, dadurch gekennzeichnet, dass am Schienenfahrzeug (3) gelagert sind:die Positionserfassungseinrichtung (1) und/oderdie Geschwindigkeitsermittlungseinrichtung (9) und/oderdie Speichereinrichtung (7, 27),
und dass Verbindungen zwischen fahrzeuggestützten Einrichtungen und nichtfahrzeuggestützten drahtlos und/oder über eine Datenleitungsanordnung erstellt sind. - System nach einem der Ansprüche 1 bis 5, dadurch gekennzeichnet, dass an einem Schienenfahrzeugwagen (1, ..., 5) mindestens die Positionserfassungseinrichtung vorgesehen ist und die Stelleinrichtung (11) auf mindestens einem weiteren, damit gekoppelten Schienenfahrzeugwagen (1, ..., 5), wobei als Schienenfahrzeugwagen (1, ..., 5) generell ein Teil einer Schienenfahrzeug-Komposition verstanden sei.
- System nach einem der Ansprüche 1 bis 6, dadurch gekennzeichnet, dass an einer Fahrzeugkomposition zwei der Wagen (1, ..., 5) als die Schienenfahrzeuge im Sinne der genannten Ansprüche ausgebildet sind und dass je nach Fahrrichtung (v) das eine Schienenfahrzeug als Masterfahrzeug, das andere als Slavefahrzeug wirkt, wobei die Querneigungssteuerung mindestens bei Ausfall der Positionserfassungseinrichtung (1) am Masterfahrzeug auf Abhängigkeit von der Positionserfassungseinrichtung (1) am Slavefahrzeug umgeschaltet wird.
- Schienenfahrzeug mit zwei unabhängig voneinander als Master und Slave betriebenen Führungssystemen nach einem der Ansprüche 1 bis 7.
- Verfahren zur Steuerung der Querneigung des Lastaufnahmebodens (13) eines Schienenfahrzeuges (3), welcher, getrieben, in seiner Querneigung verstellbar ist, wobei das Verfahren darin besteht,dass aus dem vorbekannten Verlauf des Geleises (5) sowie der Schienenfahrzeug-IST-Position (POS) und der Schienenfahrzeug-IST-Geschwindigkeit (vIST) ein erstes Querneigungs-Stellsignal (αS, αSE) für die Einstellung des Lastaufnahmebodens (13) bestimmt wird, dadurch gekennzeichnet,dass mit Hilfe einer Querbeschleunigungs-Erfassungseinrichtung als Behelfssystems (43) ein zweites Querneigungs-Stellsignal (αSm) bestimmt wird,dass das erste Querneigungs-Stellsignal (αS, αSE) mit dem zweiten (αSm) verglichen wird unddass aufgrund des Vergleichsresultats entweder das erste Querneigungs-Stellsignal (αS, αSE) oder das zweite Querneigungs-Stellsignal (αSm)zur Einstellung der Querneigung des Lastbodens verwendet wird.
- Verfahren nach Anspruch 9, dadurch gekennzeichnet, dass die Wahl für das erste (αS, αSE) oder für das zweite Querneigungs-Stellsignal ( αSm) aufgrund eines zwischen den Querneigungs-Stellsignalen (αS, αSE, αSm) vorgebbaren Maximalmasses Δmax als Abweichung vorgenommen wird.
- Verfahren nach Anspruch 9 oder 10, dadurch gekennzeichnet, dass man querneigungsrelevante Daten des Geleises (5) durch Abfahren misst, abspeichert und nachmals für die Querneigungsbestimmung und -verstellung einsetzt.
- Verfahren nach einem der Ansprüche 9 bis 11, dadurch gekennzeichnet, dass man an einem Schienenfahrzeugzug das Verfahren unabhängig zweimal durchführt, die Querneigungssteuerung nach dem einen Verfahren realisiert, das Querneigungs-Stellsignal dabei auf Plausibilität überprüft und bei Nicht-Plausibilität die Querneigungssteuerung dem zweiten Verfahren übergibt.
- Schienenfahrzeug mit einem Führungssystem nach einem der Ansprüche 1 bis 7 oder mit einer Lastboden-Querneigungssteuerung, nach dem Verfahren der Ansprüche 9 bis 12 arbeitend.
Priority Applications (10)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP94119183A EP0647553B1 (de) | 1994-12-05 | 1994-12-05 | Führungssystem und Verfahren zur Steuerung der Querneigung an einem Schienenfahrzeug |
| AT94119183T ATE171121T1 (de) | 1994-12-05 | 1994-12-05 | Führungssystem und verfahren zur steuerung der querneigung an einem schienenfahrzeug |
| DE59406923T DE59406923D1 (de) | 1994-12-05 | 1994-12-05 | Führungssystem und Verfahren zur Steuerung der Querneigung an einem Schienenfahrzeug |
| AU39217/95A AU698963B2 (en) | 1994-12-05 | 1995-12-05 | Guiding system and process for controlling the lateral inclination of a rail vehicle |
| JP8517221A JPH09508873A (ja) | 1994-12-05 | 1995-12-05 | 軌道車両における横方向傾斜状態の制御のための案内誘導装置システム及び方法 |
| CA002182481A CA2182481A1 (en) | 1994-12-05 | 1995-12-05 | Guiding system and process for controlling the lateral inclination of a railway vehicle |
| US08/687,410 US5775230A (en) | 1994-12-05 | 1995-12-05 | Guidance system and process for controlling the lateral inclination on a rail vehicle |
| PCT/CH1995/000289 WO1996017761A1 (de) | 1994-12-05 | 1995-12-05 | Führungssystem und verfahren zur steuerung der querneigung an einem schienenfahrzeug |
| FI963023A FI963023A (fi) | 1994-12-05 | 1996-07-31 | Ohjausjärjestelmä ja menetelmä poikittaiskallistuksen ohjaamiseksi kiskoajoneuvossa |
| NO963271A NO963271L (no) | 1994-12-05 | 1996-08-05 | Föringssystem og fremgangsmåte for styring av sideveis krengning ved et skinnegående kjöretöy |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP94119183A EP0647553B1 (de) | 1994-12-05 | 1994-12-05 | Führungssystem und Verfahren zur Steuerung der Querneigung an einem Schienenfahrzeug |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP0647553A2 EP0647553A2 (de) | 1995-04-12 |
| EP0647553A3 EP0647553A3 (de) | 1995-06-28 |
| EP0647553B1 true EP0647553B1 (de) | 1998-09-16 |
Family
ID=8216504
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP94119183A Expired - Lifetime EP0647553B1 (de) | 1994-12-05 | 1994-12-05 | Führungssystem und Verfahren zur Steuerung der Querneigung an einem Schienenfahrzeug |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US5775230A (de) |
| EP (1) | EP0647553B1 (de) |
| JP (1) | JPH09508873A (de) |
| AT (1) | ATE171121T1 (de) |
| AU (1) | AU698963B2 (de) |
| CA (1) | CA2182481A1 (de) |
| DE (1) | DE59406923D1 (de) |
| FI (1) | FI963023A (de) |
| NO (1) | NO963271L (de) |
| WO (1) | WO1996017761A1 (de) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SE509153C2 (sv) * | 1995-11-07 | 1998-12-07 | Const Y Aux Ferrocarriles Sa | Lutningssystem för järnvägsvagnar |
| AT500703B1 (de) * | 1995-11-10 | 2007-03-15 | Construcciones Y Aux De Ferroc | Neigevorrichtung für ein schienenfahrzeug |
| DE19703322C1 (de) * | 1997-01-30 | 1998-03-26 | Abb Daimler Benz Transp | Neigungssteuerung für Schienenfahrzeuge |
| DE19910255A1 (de) * | 1999-03-08 | 2000-09-14 | Abb Daimler Benz Transp | Neigesteuerung für ein Schienenfahrzeug |
| FR2794707B1 (fr) * | 1999-06-11 | 2003-03-14 | Alstom | Procede et dispositif de commande de l'inclinaison d'un vehicule ferroviaire pendulaire |
| DK1237774T3 (da) * | 1999-10-27 | 2003-06-23 | Db Reise & Touristik Ag | Skinnebundet køretøjsegment med skrogintegreret centrifugalkraftkompensation |
| WO2008157482A1 (en) * | 2007-06-15 | 2008-12-24 | Cadec Global, Inc. | System and method for predicting vehicle rollover using position tracking |
| FR2949860B1 (fr) * | 2009-09-04 | 2012-04-20 | Soc Nat Des Chemins De Fer Francais Sncf | Procede de qualification d'un vehicule ferroviaire. |
| JP5959378B2 (ja) | 2012-09-11 | 2016-08-02 | 川崎重工業株式会社 | 荷重測定方法及び装置、荷重測定装置を備えた鉄道車両、並びに荷重管理システム |
| JP6495663B2 (ja) * | 2015-01-13 | 2019-04-03 | 株式会社東芝 | 列車制御装置、列車制御方法及びプログラム |
| US11318842B2 (en) * | 2016-12-27 | 2022-05-03 | Nec Corporation | First train-installed device, method, and recording medium |
| CN111823214A (zh) * | 2020-07-22 | 2020-10-27 | 中信重工开诚智能装备有限公司 | 一种自动调整夹紧力的轨道巡检机器人驱动装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3717104A (en) * | 1970-07-08 | 1973-02-20 | United Aircraft Corp | Active roll controling truck stabilizing mechanism |
| ES398517A1 (es) * | 1971-01-28 | 1974-08-16 | Fiat Spa | Perfeccionamientos en un dispositivo electronico integra- dor. |
| DE2252526A1 (de) * | 1972-10-26 | 1974-05-02 | Continental Gummi Werke Ag | Neigungssteuerung fuer fahrzeugaufbauten |
| US3884437A (en) * | 1973-10-09 | 1975-05-20 | Westinghouse Air Brake Co | Train control system for transit vehicles |
| US3902691A (en) * | 1973-11-27 | 1975-09-02 | Owen J Ott | Automatic vehicle suspension system |
| SE509153C2 (sv) * | 1995-11-07 | 1998-12-07 | Const Y Aux Ferrocarriles Sa | Lutningssystem för järnvägsvagnar |
| FR2574036A1 (fr) * | 1984-12-03 | 1986-06-06 | Anf Ind | Procede et systeme d'amortissement des mouvements parasites des vehicules ferroviaires |
| EP0271592B1 (de) * | 1986-12-15 | 1989-05-24 | Honeywell Regelsysteme GmbH | Verfahren zur Neigungsregelung und Vorrichtung zur Durchführung dieses verfahrens |
| FR2633887B1 (fr) * | 1988-07-06 | 1996-05-03 | Durand Charles | Procede et dispositif pour le controle de la suspension active de caisse sur un vehicule ferroviaire |
| SE465667B (sv) * | 1989-07-13 | 1991-10-14 | Asea Brown Boveri | Anordning foer styrning av korglutning i kurvor foer spaarbundet fordon |
| US5429329A (en) * | 1994-01-31 | 1995-07-04 | Wallace; Charles C. | Robotic railroad accident prevention vehicle and associated system elements |
| IT1280854B1 (it) * | 1995-04-07 | 1998-02-11 | Fiat Ferroviaria Spa | "veicolo ferroviario con cassa ad assetto variabile" |
-
1994
- 1994-12-05 EP EP94119183A patent/EP0647553B1/de not_active Expired - Lifetime
- 1994-12-05 AT AT94119183T patent/ATE171121T1/de not_active IP Right Cessation
- 1994-12-05 DE DE59406923T patent/DE59406923D1/de not_active Expired - Fee Related
-
1995
- 1995-12-05 US US08/687,410 patent/US5775230A/en not_active Expired - Fee Related
- 1995-12-05 AU AU39217/95A patent/AU698963B2/en not_active Ceased
- 1995-12-05 WO PCT/CH1995/000289 patent/WO1996017761A1/de active Application Filing
- 1995-12-05 CA CA002182481A patent/CA2182481A1/en not_active Abandoned
- 1995-12-05 JP JP8517221A patent/JPH09508873A/ja active Pending
-
1996
- 1996-07-31 FI FI963023A patent/FI963023A/fi unknown
- 1996-08-05 NO NO963271A patent/NO963271L/no not_active Application Discontinuation
Also Published As
| Publication number | Publication date |
|---|---|
| EP0647553A2 (de) | 1995-04-12 |
| EP0647553A3 (de) | 1995-06-28 |
| ATE171121T1 (de) | 1998-10-15 |
| NO963271D0 (no) | 1996-08-05 |
| WO1996017761A1 (de) | 1996-06-13 |
| NO963271L (no) | 1996-08-05 |
| DE59406923D1 (de) | 1998-10-22 |
| JPH09508873A (ja) | 1997-09-09 |
| US5775230A (en) | 1998-07-07 |
| AU698963B2 (en) | 1998-11-12 |
| FI963023A0 (fi) | 1996-07-31 |
| FI963023A (fi) | 1996-07-31 |
| CA2182481A1 (en) | 1996-06-13 |
| AU3921795A (en) | 1996-06-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE4228414B4 (de) | Verfahren und Vorrichtung zur Aufbereitung von Sensorsignalen | |
| EP0647553B1 (de) | Führungssystem und Verfahren zur Steuerung der Querneigung an einem Schienenfahrzeug | |
| DE69828316T2 (de) | Verfahren und vorrichtung zum feststellen des entgleisens von eisenbahnwagen | |
| EP2812225B1 (de) | Verfahren zum erzeugen von handlungsempfehlungen für den führer eines schienenfahrzeugs oder steuersignalen für das schienenfahrzeug mittels eines fahrerassistenzsystems und fahrassistenzsystem | |
| EP3676138B1 (de) | Verfahren und einrichtung zur ermittlung von bremsungsrelevanten ist-werten eines schienenfahrzeuges für die durchführung einer verzögerungsgeregelten bremsung mit zentraler sensorik | |
| DE102015110053A1 (de) | Bremssystem für ein Schienenfahrzeug | |
| DE102005051077A1 (de) | Verfahren zum Erfassen und Berücksichtigen von Seitenwindbelastungen bei einem in Fahrt befindlichen Schienenfahrzeug und dessen entsprechend ausgeführter Endwagen | |
| DE112009000648T5 (de) | System und Verfahren zum Verifizieren einer Einrichtung eines Zuges mit verteilter Antriebskraft | |
| CH674180A5 (de) | ||
| EP0271592B1 (de) | Verfahren zur Neigungsregelung und Vorrichtung zur Durchführung dieses verfahrens | |
| WO1995001900A1 (de) | Einrichtung zur freigabe des öffnens der türen von schienenfahrzeugen | |
| WO2017029084A1 (de) | Prüfeinrichtung und verfahren zur überprüfung eines definierten profils von einem zugverband aus fahrzeugen, insbesondere schienenfahrzeugen | |
| EP3583012A1 (de) | Gleismessfahrzeug und verfahren zur erfassung einer vertikalen gleislage | |
| EP0568167B1 (de) | Verfahren zum Bestimmen des Rollwiderstandes von Eisenbahnfahrzeugen | |
| EP0770233B1 (de) | Verfahren und vorrichtung zur regelung der erdbezogenen wagenkastenneigung bei einem schienenfahrzeug | |
| DE212021000415U1 (de) | On-Board-Gleisprüfsystem | |
| DE102006062559A1 (de) | Verfahren zum Messen einer maximalen Zuglänge | |
| EP0860340B1 (de) | Verfahren und Vorrichtung zur Generierung eines Sensorsignales | |
| DE2547057C2 (de) | Vorrichtung zur Messung der Ausrichtung bzw. Ausfluchtung von Gleisen, insbesondere Eisenbahngleisen | |
| EP0719688B1 (de) | Führungssystem für Schienenfahrzeuge | |
| DE3827363C2 (de) | ||
| DE3821281C2 (de) | Einrichtung zur Messung der Neigung von Fahrzeugen in Richtung der Bahnbewegung | |
| EP3990322B1 (de) | Verfahren zur kalibrierung der orientierung eines in einem fahrzeug vorgesehenen beschleunigungssensors | |
| DE19939067C1 (de) | Verfahren zur Überwachung und Minimierung von Wankstufentorsionen bei Schienenfahrzeugen mit Neigevorrichtungen | |
| DE102006044329B3 (de) | System und Verfahren zur Fahrwegs- und/oder Geschwindigkeitsbestimmung von Fahrzeugen, insbesondere zur Zugbeeinflussung |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE CH DE DK ES FR GB GR IE IT LI NL PT SE |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE CH DE DK ES FR GB GR IE IT LI LU MC NL PT SE |
|
| 17P | Request for examination filed |
Effective date: 19950731 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AT BE CH DE DK ES FR GB GR IE IT LI NL PT SE |
|
| 17Q | First examination report despatched |
Effective date: 19960315 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: FIAT-SIG SCHIENENFAHRZEUGE AG |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE CH DE DK ES FR GB GR IE IT LI NL PT SE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 19980916 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRE;WARNING: LAPSES OF ITALIAN PATENTS WITH EFFECTIVE DATE BEFORE 2007 MAY HAVE OCCURRED AT ANY TIME BEFORE 2007. THE CORRECT EFFECTIVE DATE MAY BE DIFFERENT FROM THE ONE RECORDED.SCRIBED TIME-LIMIT Effective date: 19980916 Ref country code: GR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19980916 Ref country code: FR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 19980916 Ref country code: ES Free format text: THE PATENT HAS BEEN ANNULLED BY A DECISION OF A NATIONAL AUTHORITY Effective date: 19980916 |
|
| REF | Corresponds to: |
Ref document number: 171121 Country of ref document: AT Date of ref document: 19981015 Kind code of ref document: T |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REF | Corresponds to: |
Ref document number: 59406923 Country of ref document: DE Date of ref document: 19981022 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: TROESCH SCHEIDEGGER WERNER AG |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: GERMAN |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 19981216 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 19981216 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 19981218 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19981231 |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 19981215 |
|
| EN | Fr: translation not filed | ||
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19990504 |
|
| BERE | Be: lapsed |
Owner name: FIAT-SIG SCHIENENFAHRZEUGE A.G. Effective date: 19981231 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FD4D |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 19991201 Year of fee payment: 6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 19991227 Year of fee payment: 6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 19991229 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20001205 Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20001205 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20001205 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20011002 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20040226 Year of fee payment: 10 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20041231 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20041231 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |