EP0408122B1 - Schaltungsanordnung für einen Matrixdrucker - Google Patents
Schaltungsanordnung für einen Matrixdrucker Download PDFInfo
- Publication number
- EP0408122B1 EP0408122B1 EP90201800A EP90201800A EP0408122B1 EP 0408122 B1 EP0408122 B1 EP 0408122B1 EP 90201800 A EP90201800 A EP 90201800A EP 90201800 A EP90201800 A EP 90201800A EP 0408122 B1 EP0408122 B1 EP 0408122B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- signal
- printing
- counter
- pulses
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/22—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by selective application of impact or pressure on a printing material or impression-transfer material
- B41J2/23—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by selective application of impact or pressure on a printing material or impression-transfer material using print wires
- B41J2/30—Control circuits for actuators
Definitions
- the invention relates to a circuit arrangement for controlling the mechanical printing elements of a matrix printer, which are arranged in a printing head moved along the printing line and which generate characters to be printed by printing dots which are arranged in at least one predetermined printing pattern, with a control arrangement for each printing element individually providing a printing signal generated when this printing element reaches a position which lies on a recording medium by a certain printing path in front of a designated printing point.
- Matrix printers with a number of print elements arranged in a print head are generally known in a wide variety of designs, for example from DE-PS 26 32 293.
- the mechanical print element In order to print at precisely defined locations on a recording medium, in particular when printing in both directions of movement of the print head, the mechanical print element must can already be activated before this point on the record carrier is reached, in particular by the pressure delay time between the activation of the printing element, ie the pressure needle driven by an electromagnet, and to compensate for their impact on the recording medium.
- the printhead has moved a certain distance, which depends not only on the needle flight time but also on the printhead speed.
- the compensation of the needle flight time can be done by a fixed time reserve.
- DE-A-37 27 049 Another problem is dealt with by DE-A-37 27 049. It describes a print head control system for a construction in which a large number of print needles are arranged in a compact manner, which should result in problems with pinpoint accuracy due to the overlapping control currents.
- two storage devices are used, the first of which is the number of Stores print needles shot by the driven solenoid circuits from the previous drive timing while the second storage means is used to store the number of print needles to be shot by solenoid circuits driven by the subsequent drive timing.
- a computing device for calculating the times correcting the time-of-flight control and a time control device are used.
- DE - B - 25 52 667 deals with a fast printer with different printing speeds.
- the method for operating this high-speed printer uses a control system with which a variable signal is generated, which is fed to the printer in each case during a printing cycle in which a print character is reproduced after an interval of the stop of the write head.
- the print head When starting at the beginning of a print line and at the end of a print line (each seen in the current direction of movement of the print head), the print head still does not or no longer has its intended speed, so that the print head requires a start-up distance and an exit distance during which it does not print. As a result, the dimensions of the entire matrix printer and thus also the production costs are increased and the printing output is reduced.
- the object of the invention is to provide a circuit arrangement of the type mentioned at the outset which, even at different speeds of the print head, in particular when starting and stopping at the beginning or end of a printing line, enables printing at defined locations on the recording medium.
- the speed-dependent delay practically results in a path-dependent or location-dependent shift of the actual drive signal for the printing element, so that the point of impact of the printing element on the recording medium is practically always the same regardless of the printhead speed.
- the print head speed can be derived via position pulses from the scanning of the successive positions of the print head, for example by scanning a fixed linear grid by the print head.
- a simple implementation of the delay arrangement according to one embodiment of the invention is that the delay arrangement is a counter and the print signal sets the counter to a correction value which is dependent on the printhead speed, and the counter then counts to a final value by means of a count pulse input and reaches this when it is reached The control signal starts.
- the correction value can be clearly determined from the print head speed and the frequency of the counting pulses in connection with the final value of the counter.
- the delay arrangement is a shift register and the print signal writes a first binary value into a stage of the shift register determined by a correction value which is dependent on the printhead speed, and the content of the shift register is then shifted on by means of shift pulses is and the arrival of the first binary value in a predetermined level of the shift register starts the control signal.
- the delay arrangement is a shift register and the print signal writes a first binary value into a stage of the shift register determined by a correction value which is dependent on the printhead speed, and the content of the shift register is then shifted on by means of shift pulses is and the arrival of the first binary value in a predetermined level of the shift register starts the control signal.
- the delay arrangement is a shift register and the print signal writes a first binary value into a stage of the shift register determined by a correction value which is dependent on the printhead speed, and the content of the shift register is then shifted on by means of shift pulses is and the arrival of the first binary value in a predetermined level of the shift register starts the control signal.
- the counting pulses or shift pulses are derived from position pulses which are generated when the print head moves.
- the counter or the shift register therefore performs a path-dependent counting or shifting, as a result of which a path is practically measured.
- a correction arrangement for generating the correction value, which has a first counter with parallel set inputs, a clock signal of constant frequency at its count input and one at its set inputs corresponding to the print delay time between the activation of the print element and its impact on the recording medium Receives value with reference to the clock signal, and contains a second counter with parallel setting inputs, which receives the position pulses at its counting input and a value corresponding to the specific printing path at maximum speed of the printing element at its counting inputs, so that both counters receive the same setting control signal obtained, and that a carry signal of the first counter outputs a value derived from the position of the second counter then reached as a correction value to the delay arrangement.
- the basic idea is used that the parallel activation of two counters, one of which counts a time, namely the pressure delay time or the needle flight time of a printing needle, and the other counter counts position-dependent position pulses, converts a time into a path, and in the way that the print head needs at the current speed to get from the activation point of the printing element to the printing point on the recording medium.
- the print signal since the print signal is already generated at a point on the print head that is further away from the desired print point, namely by the specific print path at maximum print head speed, the print signal must be delayed by a distance of the print head that corresponds to the remaining content of the second counter corresponds. This indicates the correction value.
- this correction value changes when the speed of the print head changes, so that new, updated correction values have to be determined continuously, particularly during the start-up and run-down of the print head.
- an embodiment of the invention is characterized in that the set control signal is derived with a delay from the carry signal. In this way, a new correction value is determined at almost maximum speed, and the delay of the setting control signal can be selected depending on the processing speed in the logic circuit used.
- a further embodiment of the invention is characterized in that the occurrence of a carry signal of the second counter occurs before the carry signal of the first counter occurs Error signal generated. It is expedient that the error signal is derived at least one clock period from the occurrence condition of the two carry signals and that the error signal is suppressed if a carry signal of the first counter occurs within the delay time of the error message. In this case, it can be assumed that the limit condition has just been reached, but that there is no real error, so that the correct correction value 0 has then been generated.
- a simple control of the counter is possible according to one embodiment of the invention in that a switch is connected upstream of the counter clock input of the counter, which successively supplies the counter clock input with a rest signal or counting pulses with one of the three frequencies, that the counter generates a carry signal at the end position and with the next counting cycle starts counting again from the initial position and that the carry signal switches on a further counting arrangement with four positions, which controls the changeover switch and, with an incoming pressure signal, a loading signal for the first counter generated and goes into the first working position and generates the output signal during the second working position.
- the further counting arrangement is simple, since it only has to have four positions.
- the output of the shift register can be followed by a counter which is driven in a corresponding manner as described above with the second and third frequencies or with the idle signal.
- a counter is required for each individual printing element, so that a shift register output controls several counters simultaneously depending on the data to be printed .
- Fig. 1 is in front of a record carrier, which is only indicated here as print line L, a print element D, which is moved in the direction of the arrow shown along the print line L.
- This printing element D is intended to print a point on the printing line at position P1.
- the printing element D consists in particular of a magnet which mechanically activates a printing needle when electrically actuated, ie strikes the printing line L. Since the end of the print needle is at a certain distance from the print line L of the record carrier before the control, a certain time elapses after the control of the print element until the needle hits the record carrier.
- the electrical control of the printing element D In order to print the point P1, the electrical control of the printing element D must take place before it has reached this pressure point P1, depending on the speed of movement of the printing element D.
- the maximum speed assume that the printing element D must already be controlled electrically when it has reached the point P2 on the printing line L. This applies at a constant speed for all printing dots, so that the control pattern of the printing element D is quasi shifted by a certain printing path compared to the printing pattern on the recording medium.
- a corresponding shift to the other side is then necessary. This shift can easily be taken into account when generating the pressure signals, at least for a constant speed of the pressure element.
- a speed of the printing element is expediently assumed, which is at least the same, but for reasons of safety it is greater than the maximum speed of the printing element.
- the electrical actuation of the printing element D for the same printing point P1 must take place at a different location on the printing line L. If the printing element D is still activated at point P2, it has only reached point P4 at a lower speed in the direction of the arrow after the needle flight time of the printing needle when the printing needle hits the recording medium. The actuation and thus the mechanical activation of the printing element D must therefore be delayed by the distance between the points P1 and P4 compared to the pressure signal generated in advance by the constant displacement at Ps, namely at the point P3 in order to print again at the point P1. So the pressure signal must be delayed by the distance between P2 and P3.
- FIG. 2 schematically shows an arrangement for controlling an electromechanical printing element of a matrix printer, in which a speed-dependent delay is carried out between the printing signal and the driving signal of the printing element.
- position pulses are supplied, which are derived from the movement of the printing element D, the distance between two position pulses thus a certain distance of the Pressure element D corresponds.
- These position pulses are fed to an arrangement 48, which preferably accumulates the position pulses, so that a value indicating the position of the printing element is produced at the output 49.
- This is fed to a comparator 58, which receives a desired position of the pressure element via a further input 59. This can be point P2 in FIG. 1, for example.
- the comparator 58 emits a pressure signal at the output 24. It is assumed that only positions that are actually to be printed are fed to the input 59. However, it is also possible to use the input 59 to feed positions of a printing raster on which a printing dot is possible, but depending on the information to be printed out, which is stored, for example, pixel by pixel in a memory, the printing signal 24 then being fed to this memory.
- a delay arrangement 6 is supplied with a pressure signal via line 24. After a delay time which is determined by a correction value supplied via the connection 14 by a correction arrangement 8, this delay arrangement 6 emits on the line 21 a control signal to the printing magnet 7, which sets the printing needle in direct motion.
- a matrix printer generally contains a larger number of printing elements in one print head. If the positions of a print screen are supplied via the input 59, the arrangements 48 and 58 as well as the correction arrangement 8 for generating the correction value on the connection 14 can be common for all print elements of the print head.
- the correction value on the connection 14 is generated by the correction arrangement 8 from the position pulses on the line 26 and from a clock signal of constant frequency on a line 9 and from further, fixed parameters.
- the circuit arrangement shown in FIG. 3 represents an embodiment of the delay arrangement 6, which is actually present in many cases, namely here once for each printing element. It contains a counter 10, and each counter serves both to delay the print signal depending on the printhead speed and to determine the activation time or activation time of the printing element or the printing elements and to determine the subsequent one Break time.
- the counter can be set to the correction value K by a signal DS ', which is supplied by the correction arrangement 8 via the multiple connection 14.
- This signal DS ' is generated from the pressure signal DS coming from the outside via line 24 in the AND gate 22 when this is released by the signals on lines 17 and 19 of D flip-flops 16 and 18 in their rest position.
- the counter 10 receives counting clocks f1, f2 and f3 from a switchover arrangement 12, which can expediently be designed as a 4: 1 multiplexer and which is controlled via the lines 13 and 15 by the working outputs of the D flip-flops 16 and 18. In its idle state, input 1, which receives an idle signal, is switched through to the counting input of counter 10, so that counter 10 does not count.
- a switchover arrangement 12 which can expediently be designed as a 4: 1 multiplexer and which is controlled via the lines 13 and 15 by the working outputs of the D flip-flops 16 and 18.
- input 1 which receives an idle signal, is switched through to the counting input of counter 10, so that counter 10 does not count.
- the AND gate 20 generates an enable signal for the control of the magnets of the corresponding printing elements at the output 21, and in addition the switching arrangement 12 now carries the clock signal supplied via the input 3 to the counter 10 to.
- This clock signal has such a fixed frequency f2 that the counter 10 during the time that the magnets must remain energized, after the generation of the carry signal reaches the end position starting from the start position, at which a carry signal is again generated on line 11. It should be noted that instead the counter also depends on the end position can count down to the starting position if this is technically more favorable.
- the counter After the time period t a , which corresponds to the actuation time of the printing magnets, the counter reaches the end position E a second time, namely at time t2, and a carry signal appears on line 11 in FIG. 3, which the D flip-flop 16 in the idle position switches because there is a logical "0" on line 19 because of the working position of the D-flip-flop 18.
- the D flip-flop 18 remains in the working position.
- the signal generated by the AND gate 20 at the output 21 thus ends, while the changeover switch 12 is also switched on, so that the counter 10 receives the clock signal fed to the input 4 at the frequency f3.
- This frequency determines the pause time t p until time t3, which is dimensioned such that the sum of all three sections t k , t a and t p is greater than the period t r of the actuation of the pressure elements.
- the D flip-flops 16 and 18 represent a counter with four positions, which, however, can also be implemented in any other way.
- the arrangement described is required at least for each group of printing needles that coincide with the printing screen. However, it is also possible to provide such an arrangement for each pressure element, the pressure signal supplied via line 24 being directly assigned to a specific pressure element whose pressure magnet is controlled individually via line 21.
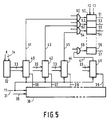
- FIG. 5 Another circuit arrangement in which the delay of the pressure signals is carried out by shift registers is shown in FIG. 5.
- a delay arrangement 30 which generates time-dependent pressure signals at the outputs 36 to 39 from the arrangement of the printing elements in the print head, as described in the earlier, not previously published application P 39 07 080.8.
- These delayed print signals are derived from a signal supplied via line 35, which depends on the density of the print screen and which is pushed through the arrangement 30 by a clock signal on line 31, the frequency f1 of this clock signal being derived from the position pulses of the print head .
- the correction value K is generated in a corresponding manner as indicated in FIG. 1 and coded via the multiple line 14 to a decoder 32 which converts this correction value K into a 1-out-of-n representation on the multiple line 33.
- This multiple line 33 leads to the parallel set inputs of a number of shift registers 40, 42, 44 to 46, the load input with one each of the outputs 36 to 39 of the arrangement 30 is connected and, in the case of a signal on an output, writes the current decoded correction value into the shift register in question.
- This means that a certain level in the shift register is set to a first binary value, for example logically "1", while at least a number of levels in front of it contain the other binary value.
- This logic value "1" is then shifted with the clock signal with the frequency f1 on line 31 until it arrives at the end of the shift register.
- the outputs 41, 43, 45 to 47 of the shift registers 40, 42, 44 to 46 each lead to an AND gate 60, 62, 64 to 66, which receives delayed signals from a character generator at the other, unspecified input.
- the outputs of the AND gates control counting arrangements 50, 52, 54 to 56, which can be constructed similarly to the circuit shown in FIG. 3, but here are only alternately either in the idle state or are counted on with clock signals with the frequencies f2 or f3 .
- the outputs 51, 53, 55 to 57 of the counting arrangements then control the electromagnets of printing needles.
- the counting arrangements 50, 52, 54 to 56 are used to determine the duration of the actuation of the electromagnets and the subsequent pause times, while the shift registers 40, 42, 44 to 46 generate the delay dependent on the print head speed of the delays at the outputs 36 to 39 of the arrangement 30 Cause pressure signals.
- the instantaneous print head speed is contained both in the correction value K supplied via the connection 14 and in the frequency f1 of the clock signal on the line 31.
- the structure of the correction arrangement 8 (FIG. 2) for generating the correction value K is shown in more detail in FIG. 6.
- This contains two registers 70 and 80, each for a data word with a number of bits, to each of which a data word is fed in parallel via an input 25, which in register 70 with a write signal on line 27 and in register 80 with a write signal on Line 29 is registered.
- the output of the register 70 leads to the parallel set inputs 71 of a counter 72, which receives clock signals of constant frequency via the line 9 at its counter input.
- a value has been written into the register 70 which corresponds to the needle flight time of the printing needle of a printing element, based on the clock signals on the Line 9, ie if the counter 72 is set to this value by a setting control signal on line 75, it just reaches its end position during the entire needle flight time and generates a carry signal at output 73.
- the output of register 80 is with set inputs 81 connected to a counter 82, which receives the position pulses supplied via line 26 at its counter input.
- the value written into the register 80 corresponds to the path of the printing element during the needle flight time at the maximum speed of the printing element, ie, based on FIG. 1, the number of position pulses during the movement of the printing element D from point P2 to pressure point P1. If, with the set control signal on line 75, both counters 72 and 82 are simultaneously set to their respective positions, at maximum speed of the printing element, ie at the highest frequency of the position pulses on line 26, counter 82 just reaches its end position when counter 72 reaches its end position and emits a carry signal on line 73.
- the carry signal on line 73 also drives a delay 74 which generates the set control signal on line 75.
- the delay element 74 serves, in particular, to ensure the correct transfer of the counter reading of the counter 82 into the register 84 before the counter 82 is set again on the line 75 by the setting control signal.
- the write signal on line 27 also drives delay element 74 in order to start the determination of the correction value. When using corresponding components or circuit technology, the delay element 74 can also be omitted.
- a carry signal on line 83 cannot appear earlier than counter 72 has generated a carry signal on line 73.
- an AND gate 76 is provided which emits a signal on the output line 77 if the carry signal appears on the line 83 while no carry signal has yet occurred on the line 73.
- the output 77 is connected to the D input of a D flip-flop 78 which, with the next clock signal on line 9, accepts the signal on line 77 and outputs it at output 79. This can already be evaluated as an error signal.
- the flip-flop 78 is still set, but the signal at the output 77 of the AND gate 76 then disappears that the flip-flop 88 then no longer is set. The correct zero correction value then arises at output 14.
- registers 70 and 80 By using registers 70 and 80, the default values for counters 72 and 82 can be easily changed. If, for example, the maximum print head speed is reduced, for example for printing in a particularly narrow print pattern for high print quality, the value in register 80 can be reduced accordingly, but then the distance or the shift of the print signals with respect to the dots to be printed is also smaller must be chosen.
- the value written in register 70 is reduced if a thicker set of forms is to be printed instead of a sheet, since then the needle flight time is shorter. Decreasing is understood to mean that the counters 72 and 82 then require a smaller number of pulses at the counter input in order to reach the end position, for which the counters at the set inputs 71 and 81, for example, have the complement values of those written into the registers 70 and 80 Get values.
- the delay of the print signals can also be achieved by other technical possibilities. For example, by using analog controllable delay elements.
Description
- Die Erfindung betrifft eine Schaltungsanordnung zur Ansteuerung der mechanischen Druckelemente eines Matrixdruckers, die in einem längs der Druckzeile bewegten Druckkopf angeordnet sind und die zu druckenden Zeichen durch Druckpunkte erzeugen, die in wenigstens einem vorgegebenen Druckraster angeordnet sind, wobei eine Steueranordnung für jedes Druckelement individuell ein Drucksignal erzeugt, wenn dieses Druckelement eine Position, die um einen bestimmten Druckweg vor einer vorgesehenen Druckstelle auf einem Aufzeichnungsträger liegt, erreicht.
- Matrixdrucker mit einer Anzahl in einem Druckkopf angeordneter Druckelemente sind in verschiedenster Ausführung allgemein bekannt, beispielsweise aus der DE- PS 26 32 293. Um an genau definierten Stellen auf einem Aufzeichnungsträger zu drucken, insbesondere beim Druck in beiden Bewegungsrichtungen des Druckkopfes, muß das mechanische Druckelement bereits angesteuert werden, bevor diese Stelle auf dem Aufzeichnungsträger erreicht ist, um insbesondere die Druckverzögerungszeit zwischen der Aktivierung des Druckelements, d.h. der durch einen Elektromagneten angetriebenen Drucknadel, und deren Auftreffen auf den Aufzeichnungsträger zu kompensieren. Während dieser Nadelflugzeit hat sich der Druckkopf nämlich um eine bestimmte Strecke bewegt, die außer von der Nadelflugzeit auch von der Druckkopfgeschwindigkeit abhängt. Die Kompensation der Nadelflugzeit kann durch einen festen zeitlichen Vorhalt geschehen.
- Mit einem anderen Problem beschäftigt sich die DE - A - 37 27 049. Sie beschreibt ein Druckkopf - Ansteuersystem für eine Konstruktion bei der eine große Anzahl von Drucknadeln kompakt angeordnet sind, woraus sich durch die überlappenden Ansteuerströme Probleme mit der Punktgenauigkeit ergeben sollen. Zur Lösung der gestellten Aufgabe werden zwei Speichereinrichtungen eingesetzt, von denen die erste die Zahl der Drucknadeln speichert, die durch die angesteuerten Magnetschaltungen von der vorhergehenden Ansteuerzeitsteuerung abgeschossen wurden, während die zweite Speichereinrichtung zum Speichern der Anzahl von Drucknadeln eingesetzt wird, die durch Magnetschaltungen abgeschossen werden sollen, die durch die nachfolgende Ansteuerzeitsteuerung angesteuert werden. Ferner ist eine Recheneinrichtung zur Berechnung der die Flugzeitsteuerung berichtigenden Zeiten, sowie eine Zeitsteuereinrichtung eingesetzt.
- Die mit dem Stand der Technik vorstehend genannten Probleme und Lösungen gelten nur, wenn der Druckknopf mit konstanter Geschwindigkeit bewegt wird.
- Die DE - B - 25 52 667 beschäftigt sich mit einem Schnelldrucker mit unterschiedlichen Druckgeschwindigkeiten. Das Verfahren zum Betrieb dieses Schnelldruckers benutzt eine Steueranlage mit der ein veränderliches Signal erzeugt wird, das dem Drucker jeweils während eines Druckzyklus zugeführt wird, in dem ein Druckzeichen nach einem Intervall des Stillstandes des Schreibkopfes wiedergegeben wird.
- Beim Anlaufen am Beginn einer Druckzeile sowie am Auslaufen am Ende einer Druckzeile (jeweils in momentaner Bewegungsrichtung des Druckkopfes gesehen) hat der Druckkopf jedoch noch nicht bzw. nicht mehr seine vorgesehene Geschwindigkeit, so daß der Druckkopf eine Anlaufstrecke und eine Auslaufstrecke benötigt, während der er nicht druckt. Dadurch werden die Abmaße des gesamten Matrixdruckers und damit auch die Herstellungskosten vergrößert und die Druckleistung vermindert.
- Aufgabe der Erfindung ist es, eine Schaltungsanordnung der eingangs genannten Art anzugeben, die auch bei unterschiedlichen Geschwindigkeiten des Druckkopfes, insbesondere beim Anlaufen und Auslaufen am Anfang bzw. Ende jeweils einer Druckzeile, das Drucken an definierten Stellen auf dem Aufzeichnungsträger ermöglicht.
- Diese Aufgabe wird erfindungsgemäß dadurch gelöst, daß denjenigen Druckelementen im Druckkopf eine Verzögerungsanordnung zugeordnet ist, die bei Ansteuerung durch ein Drucksignal nach einer Verzögerung, die durch die Druckkopfgeschwindigkeit bestimmt ist, ein Ansteuersignal für die unmittelbare mechanische Aktivierung des zugehörigen Druckelements startet.
- Durch die geschwindigkeitsabhängige Verzögerung ergibt sich praktisch eine wege- bzw. ortsabhängige Verschiebung des eigentlichen Ansteuersignals für das Druckelement, so daß der Auftreffpunkt des Druckelements auf dem Aufzeichnungsträger praktisch unabhängig von der Druckkopfgeschwindigkeit stets gleich ist. Die Druckkopfgeschwindigkeit kann über Positionsimpulse aus der Abtastung der aufeinanderfolgenden Positionen des Druckkopfes, beispielsweise durch Abtastung eines fest angeordneten linearen Rasters durch den Druckkopf, abgeleitet werden.
- Eine einfache Verwirklichung der Verzögerungsanordnung besteht nach einer Ausgestaltung der Erfindung darin, daß die Verzögerungsanordnung ein Zähler ist und das Drucksignal den Zähler auf einen von der Druckkopfgeschwindigkeit abhängigen Korrekturwert setzt und der Zähler danach mittels einem Zählimpulseingang zugeführter Zählimpulse bis zu einem Endwert zählt und bei Erreichen dieses Endwertes das Ansteuersignal startet. Der Korrekturwert kann eindeutig aus der Druckkopfgeschwindigkeit und der Frequenz der Zählimpulse im Zusammenhang mit dem Endwert des Zählers bestimmt werden.
- Wenn bei dieser Ausführung das Druckraster, d.h. die Spalten, in denen ein Punkt gedruckt werden kann, so eng ist, daß ein und dasselbe Druckelement aufgrund der gesamten Bewegung einschließlich Rückkehrzeit in die Ruhelage erst nach mehreren Spalten erneut einen Punkt drucken kann, ist für jedes einzelne Druckelement ein eigener Zähler erforderlich.
- Eine andere Verwirklichung der Verzögerungsanordnung besteht gemäß einer anderen Ausgestaltung der Erfindung darin, daß die Verzögerungsanordnung ein Schieberegister ist und das Drucksignal einen ersten binären Wert in eine durch einen von der Druckkopfgeschwindigkeit abhängigen Korrekturwert bestimmte Stufe des Schieberegisters einschreibt und der Inhalt des Schieberegisters danach mittels Schiebeimpulse weitergeschoben wird und das Eintreffen des ersten binären Werts in einer vorgegebenen Stufe des Schieberegisters das Ansteuersignal startet. Bei dieser Ausführung kann in entsprechender Weise wie bei Verwendung eines Zählers der Korrekturwert für die Bestimmung der Stufe des Schieberegisters, in die der erste binäre Wert eingeschrieben wird, eindeutig aus der Druckkopfgeschwindigkeit und der Frequenz der Zählimpulse im Zusammenhang mit der Lage der vorgegebenen Stufe des Schieberegisters bestimmt werden. Hier ist auch bei dem vorerwähnten engen Druckraster für alle Druckelemente derselben Druckspalte nur ein Schieberegister erforderlich. In beiden Fällen kann auch bei nicht ganz konstanter Druckkopfgeschwindigkeit die Verzögerung weitgehend genau bestimmt werden.
- Für eine noch genauere Bestimmung der Verzögerung insbesondere bei einer schnellen Geschwindigkeitsänderung des Druckkopfes ist es nach einer weiteren Ausgestaltung der Erfindung zweckmäßig, daß die Zählimpulse bzw. Schiebeimpulse von Positionsimpulsen abgeleitet sind, die bei der Bewegung des Druckkopfes erzeugt sind. Der Zähler bzw. das Schieberegister nimmt für die Verzögerung zwischen dem Auftreten des Drucksignals und dem Ansteuern des Druckelements also eine wegeabhängige Zählung bzw. Verschiebung vor, wodurch praktisch ein Weg gemessen wird.
- Durch die erfindungsgemäßen Maßnahmen erfolgt beim Abbremsen oder Beschleunigen des Druckkopfes innerhalb einer Druckzeile stets eine korrekte Kompensation der Flugzeit von elektromagnetisch ausgelösten Drucknadeln. Damit ist es auch möglich, in der Grafik - Betriebsweise in beiden Richtungen zu drucken. Ferner wird die Gehäusebreite des Druckers durch weitgehend entfallende Anlauf- und Bremswege verringert und die Druckleistung erhöht.
- Die Erzeugung des Korrekturwertes geht zweckmäßig ebenfalls von diesen Positionsimpulsen aus. Nach einer weiteren Ausgestaltung der Erfindung ist zur Erzeugung des Korrekturwertes eine Korrekturanordnung vorgesehen, die einen ersten Zähler mit parallelen Setzeingängen, der an seinem Zähleingang ein Taktsignal konstanter Frequenz und an seinen Setzeingängen einen der Druckverzögerungszeit zwischen der Aktivierung des Druckelements und dessen Auftreffen auf dem Aufzeichnungsträger entsprechenden Wert mit Bezug auf das Taktsignal erhält, und einen zweiten Zähler mit parallelen Setzeingängen enthält, der an seinem Zähleingang die Positionsimpulse und an seinen Setzeingängen einen dem bestimmten Druckweg bei maximaler Geschwindigkeit des Druckelements entsprechenden Wert erhält, so daß beide Zähler dasselbe Setzsteuersignal erhalten, und daß ein Übertragssignal des ersten Zählers einen von der dann erreichten Stellung des zweiten Zählers abgeleiteten Wert als Korrekturwert an die Verzögerungsanordnung abgibt.
- Dabei wird der Grundgedanke benutzt, daß durch die parallele Aktivierung zweier Zähler, von denen der eine eine Zeit zählt, nämlich die Druckverzögerungszeit bzw. die Nadelflugzeit einer Drucknadel, und der andere Zähler wegabhängige Positionsimpulse zählt, eine Umsetzung einer Zeit in einen Weg erfolgt, und zwar in den Weg, den der Druckkopf bei der momentanen Geschwindigkeit benötigt, um von dem Aktivierungspunkt des Druckelements bis zum Druckpunkt auf den Aufzeichnungsträger zu gelangen. Da das Drucksignal jedoch bereits an einer Stelle des Druckkopfes erzeugt wird, die weiter von dem gewünschten Druckpunkt entfernt ist, nämlich um den bestimmten Druckweg bei maximaler Geschwindigkeit des Druckkopfes, muß das Drucksignal um eine Wegstrecke des Druckkopfes verzögert werden, die dem Restinhalt des zweiten Zählers entspricht. Dieser gibt somit den Korrekturwert an.
- Dieser Korrekturwert ändert sich selbstverständlich, wenn sich die Geschwindigkeit des Druckkopfes ändert, so daß insbesondere im Anlauf und Auslauf des Druckkopfes ständig neue, aktualisierte Korrekturwerte ermittelt werden müssen. Um die Korrekturwerte möglichst schnell zu erzeugen, ist eine Ausgestaltung der Erfindung dadurch gekennzeichnet, daß das Setzsteuersignal verzögert von dem Übertragssignal abgeleitet ist. Auf diese Weise wird mit nahezu maximaler Geschwindigkeit jeweils ein neuer Korrekturwert ermittelt, wobei die Verzögerung des Setzsteuersignals durch die Verarbeitungsgeschwindigkeit in der verwendeten Logikschaltung abhängig gewählt werden kann.
- Bei der maximalen Geschwindigkeit des Druckkopfes ist insbesondere ein Überschwingen beim Anlauf zu berücksichtigen, und zweckmäßigerweise wird noch ein weiterer Sicherheitszuschlag einbezogen. Dennoch kann nicht ganz ausgeschlossen werden, daß unter bestimmten Umständen, beispielsweise auch durch das Auftreten von Störsignalen, der zweite Zähler früher seine Endstellung erreicht als der erste Zähler. Um unter diesen Umständen die Erzeugung eines falschen Korrekturwertes zu verhindern, ist eine weitere Ausgestaltung der Erfindung dadurch gekennzeichnet, daß das Auftreten eines Übertragssignals des zweiten Zählers vor dem Auftreten des Übertragssignals des ersten Zählers ein Fehlersignal erzeugt. Zweckmäßig ist dabei, daß das Fehlersignal mindestens um eine Taktperiode verzögert von der Auftrittsbedingung der beiden Übertragssignale abgeleitet ist und daß das Fehlersignal unterdrückt ist, wenn innerhalb der Verzögerungszeit der Fehlermeldung noch ein Übertragssignal des ersten Zählers auftritt. In diesem Falle kann nämlich davon ausgegangen werden, daß die Grenzbedingung gerade erreicht worden ist, jedoch kein echter Fehler vorliegt, so daß dann noch der richtige Korrekturwert 0 erzeugt worden ist.
- Für die Ansteuerung eines elektromagnetischen Druck
- elements muß ein Stromimpuls einer genau vorbestimmten Dauer angelegt werden, und danach muß für eine vorbestimmte Zeitdauer eine erneute Ansteuerung des Druckelements verhindert werden, damit dieses zunächst in die Ausgangslage zurückkehren kann. Um diese Zeiten auf einfache Weise zu bestimmen, ist es nach einer weiteren Ausgestaltung der Erfindung bei Verwendung eines Zählers zweckmäßig, daß der Zähler nach dem Erreichen des ersten Endwertes den Zählimpulseingang auf die Zählimpulse einer konstanten zweiten Frequenz entsprechend der Aktivierungszeit eines Druckelements umschaltet und der beim erneuten Erreichen der Endstellung das erste Ansteuersignal beendet und den Zählimpulseingang auf Zählimpulse mit einer dritten Frequenz umschaltet, die so gewählt ist, daß der Zähler bei maximaler Druckkopfgeschwindigkeit die Endstellung zum dritten Male erreicht, nachdem seit dem Drucksignal mindestens eine vorgegebene Druckelement-Periodendauer verstrichen ist, wobei bis zu diesem Zeitpunkt weitere Drucksignale gesperrt sind. Auf diese Weise ist nur wenig Aufwand erforderlich, um zusätzlich zu der geschwindigkeitsabhängigen Verzögerung genau definierte Aktivierungs- und Pausenzeiten zu erzeugen. Die Zählimpulse der zweiten und der dritten Frequenz können dabei beispielsweise durch Teilung aus den Impulsen eines Quarzoszillators gewonnen werden. Dabei sind alle drei Frequenzen für alle Verzögerungsanordnungen der Druckelemente gleich.
- Eine einfache Steuerung des Zählers ist nach einer Ausgestaltung der Erfindung dadurch möglich, daß dem Zähltakteingang des Zählers ein Umschalter vorgeschaltet ist, der dem Zähltakteingang nacheinander ein Ruhesignal oder Zählimpulse mit einer der drei Frequenzen zuführt, daß der Zähler bei der Endstellung ein Übertragssignal erzeugt und mit dem nächsten Zähltakt wieder von der Anfangsstellung zu zählen beginnt und daß das Übertragssignal eine weitere Zählanordnung mit vier Stellungen weiterschaltet, die den Umschalter steuert und mit einem eintreffenden Drucksignal ein Ladesignal für den ersteren Zähler erzeugt und in die erste Arbeitsstellung geht und während der zweiten Arbeitsstellung das Ausgangssignal erzeugt. Die weitere Zählanordnung ist dabei einfach aufgebaut, da sie nur vier Stellungen aufweisen muß.
- Bei Verwendung eines Schieberegisters anstelle eines Zählers als Verzögerungsanordnung kann dem Ausgang des Schieberegisters ein Zähler nachgeschaltet sein, der in entsprechender Weise wie vorstehend beschrieben mit der zweiten und der dritten Frequenz bzw. mit dem Ruhesignal angesteuert wird. Bei dem vorerwähnten engen Druckraster ist für jedes einzelne Druckelement ein derartiger Zähler erforderlich, so daß ein Schieberegisterausgang abhängig von den zu druckenden Daten mehrere Zähler gleichzeitig ansteuert.
- Ausführungsbeispiele der Erfindung werden nachstehend anhand der Zeichnung näher erläutert. Es zeigen
- Fig. 1 eine schematische Darstellung zur Erläuterung der geschwindigkeitsabhängigen Verzögerung,
- Fig. 2 ein schematisches Blockschaltbild einer Anordnung zur Erzeugung der Ansteuersignale für ein Druckelement,
- Fig. 3 ein Blockschaltbild einer erfindungsgemäßen Schaltungsanordnung mit einem Zähler,
- Fig. 4 ein Zeitdiagramm der Zählerstellungen des Zählers darin,
- Fig. 5 ein Blockschaltbild einer erfindungsgemäßen Schaltungsanordnung mit Schieberegistern.
- Fig. 6 das Blockschaltbild eines Ausführungsbeispiels einer erfindungsgemäßen Schaltungsanordnung.
- In Fig. 1 befindet sich vor einem Aufzeichnungsträger, der hier nur als Druckzeile L angedeutet ist, ein Druckelement D, das in Richtung des dargestellten Pfeils längs der Druckzeile L bewegt wird. Dieses Druckelement D soll an der Stelle P1 einen Punkt auf der Druckzeile drucken. Das Druckelement D besteht insbesondere aus einem Magneten, der bei elektrischer Ansteuerung eine Drucknadel mechanisch aktiviert, d.h. auf die Druckzeile L schlägt. Da sich das Ende der Drucknadel vor der Ansteuerung in einer gewissen Entfernung von der Druckzeile L des Aufzeichnungsträgers befindet, verstreicht eine gewisse Zeit nach der Ansteuerung des Druckelements, bis die Nadel den Aufzeichnungsträger trifft. Um den Punkt P1 zu drucken, muß die elektrische Ansteuerung des Druckelements D bereits erfolgen, bevor dieses diesen Druckpunkt P1 erreicht hat, und zwar abhängig von der Bewegungsgeschwindigkeit des Druckelements D. Bei einer bestimmten Geschwindigkeit, beispielsweise der maximalen Geschwindigkeit, sei angenommen, daß das Druckelement D bereits elektrisch angesteuert werden muß, wenn es den Punkt P2 auf der Druckzeile L erreicht hat. Dies gilt bei konstanter Geschwindigkeit für alle Druckpunkte, so daß das Ansteuermuster des Druckelements D gegenüber dem Druckmuster auf dem Aufzeichnungsträger quasi um einen bestimmten Druckweg verschoben ist. Bei einem Druck in der entgegengesetzten Bewegungsrichtung des Druckelements D ist dann eine entsprechende Verschiebung zur anderen Seite erforderlich. Diese Verschiebung kann bei der Erzeugung der Drucksignale leicht berücksichtigt werden, zumindest für eine konstante Geschwindigkeit des Druckelements. Zweckmäßig wird dabei von einer Geschwindigkeit des Druckelements ausgegangen, die mindestens gleich, aus Gründen der Sicherheit jedoch größer ist als die maximale Geschwindigkeit des Druckelements.
- Wenn sich das Druckelement nun langsamer bewegt, Insbesondere beim Anlauf und Auslauf am Anfang bzw. Ende der Druckzeile L, muß die elektrische Ansteuerung des Druckelements D für den gleichen Druckpunkt P1 an einer anderen Stelle der Druckzeile L erfolgen. Wenn nämlich weiterhin am Punkt P2 das Druckelement D angesteuert wird, hat es nach der Nadelflugzeit der Drucknadel bei geringerer Geschwindigkeit in Pfeilrichtung erst den Punkt P4 erreicht, wenn die Drucknadel den Aufzeichnungsträger trifft. Die Ansteuerung und damit die mechanische Aktivierung des Druckelements D muß also um den Abstand zwischen den Punkten P1 und P4 gegenüber dem um die konstante Verschiebung bei Ps voreilend erzeugten Drucksignal verzögert erfolgen, nämlich am Punkt P3, um wieder an der Stelle P1 zu drucken. Damit muß also das Drucksignal um den Weg zwischen P2 und P3 verzögert werden. Dies ist der Weg, der von dem Weg zwischen P1 und P2 übrig bleibt, wenn davon der Weg des Druckelements abgezogen wird, den dieses während der Nadelflugzeit längs der Druckzeile zurücklegt. Es muß also eine Verzögerung zwischen dem Drucksignal und dem Ansteuersignal des Druckelements vorgesehen werden, wobei die Verzögerungszeit abhängig von der Geschwindigkeit des Druckelements ist.
- In Fig. 2 ist schematisch eine Anordnung zur Ansteuerung eines elektromechanischen Druckelements eines Matrixdruckers dargestellt, bei der eine geschwindigkeitsabhängige Verzögerung zwischen dem Drucksignal und dem Ansteuersignal des Druckelements vorgenommen wird. Über den Eingang 26 werden Positionsimpulse zugeführt, die von der Bewegung des Druckelements D abgeleitet sind, wobei der Abstand zwischen zwei Positionsimpulsen also einer bestimmten Wegstrecke des Druckelements D entspricht. Diese Positionsimpulse werden einer Anordnung 48 zugeführt, die die Positionsimpulse vorzugsweise aufakkumuliert, so daß am Ausgang 49 ein die Position des Druckelements angebender Wert entsteht. Dieser wird einem Vergleicher 58 zugeführt, der über einen weiteren Eingang 59 eine Sollposition des Druckelements empfängt. Dies kann beispielsweise die Stelle P2 in Fig. 1 sein. Sobald das Druckelement D diese Position erreicht hat, gibt der Vergleicher 58 ein Drucksignal am Ausgang 24 ab. Dabei wird angenommen, daß am Eingang 59 nur tatsächlich zu druckende Positionen zugeführt werden. Es ist jedoch auch möglich, über den Eingang 59 Positionen eines Druckrasters zuzuführen, auf denen ein Druckpunkt möglich ist, jedoch abhängig von der auszudruckenden Information, die beispielsweise bildpunktweise in einem Speicher gespeichert ist, wobei dann das Drucksignal 24 diesem Speicher zugeführt wird.
- Bei einem tatsächlich zu druckenden Punkt wird einer Verzögerungsanordnung 6 über die Leitung 24 ein Drucksignal zugeführt. Diese Verzögerungsanordnung 6 gibt nach einer Verzögerungszeit, die durch einen über die Verbindung 14 von einer Korrekturanordnung 8 zugeführten Korrekturwert bestimmt ist, auf der Leitung 21 ein Ansteuersignal an den Druckmagneten 7 ab, der die Drucknadel unmittelbar in Bewegung setzt.
- Hier ist zunächst nur ein Druckelement erwähnt, jedoch enthält ein Matrixdrucker allgemein eine größere Anzahl Druckelemente in einem Druckkopf. Wenn über den Eingang 59 die Positionen eines Druckrasters zugeführt werden, können die Anordnungen 48 und 58 sowie die Korrekturanordnung 8 zur Erzeugung des Korrekturwertes auf der Verbindung 14 für alle Druckelemente des Druckkopfes gemeinsam sein.
- Der Korrekturwert auf der Verbindung 14 wird von der Korrekturanordnung 8 aus den Positionsimpulsen auf der Leitung 26 und aus einem Taktsignal konstanter Frequenz auf einer Leitung 9 sowie aus weiteren, fest eingestellten Parametern erzeugt.
- Die in Fig. 3 dargestellte Schaltungsanordnung stellt eine Ausführung der Verzögerungsanordnung 6 dar, die tatsächlich vielfach vorhanden ist, nämlich hier einmal für jedes Druckelement. Sie enthält einen Zähler 10, und jeder Zähler dient sowohl zur Verzögerung des Drucksignals abhängig von der Druckkopfgeschwindigkeit als auch zur Bestimmung der Ansteuerzeit bzw. Aktivierungszeit des Druckelements bzw. der Druckelemente und zur Bestimmung der anschließenden Pausenzeit. Dazu ist der Zähler durch ein Signal DS' auf den Korrekturwert K setzbar, der von der Korrekturanordnung 8 über die Mehrfachverbindung 14 zugeführt wird. Dieses Signal DS' wird aus dem von außen über die Leitung 24 kommenden Drucksignal DS in dem UND- Glied 22 erzeugt, wenn dieses durch die Signale auf Leitungen 17 und 19 von D- Flipflops 16 und 18 in deren Ruhestellung freigegeben wird.
- Der Zähler 10 erhält Zähltakte f1, f2 und f3 von einer Umschaltanordnung 12, die zweckmäßig als 4:1- Multiplexer ausgeführt sein kann und die über die Leitungen 13 und 15 von den Arbeitsausgängen der D- Flipflops 16 und 18 gesteuert wird. In deren Ruhestand wird der Eingang 1, der ein Ruhesignal erhält, zum Zähleingang des Zählers 10 durchgeschaltet, so daß der Zähler 10 nicht zählt.
- Sobald ein Drucksignal DS auf der Leitung 24 empfangen wird, erscheint auf der Leitung 23 ein Signal DS', das den Zähler 10 auf den Korrekturwert K setzt, wie bereits erwähnt wurde, und das D- Flipflop 16 in die Arbeitslage bringt. Dadurch wird einerseits über die Leitung 17 das UND- Glied 22 gesperrt und andererseits die Umschaltanordnung 12 in die nächste Stellung gesetzt, in der der Zähler 10 das über den Eingang 2 zugeführte Taktsignal mit wegabhängiger Frequenz f1 erhält und zählt, das beispielsweise wie das Signal auf der Leitung 26 von der Abtastung der Druckkopfposition abgeleitet ist. Der Zähler 10 zählt nun dieses Taktsignal, bis er seine Endstellung erreicht hat und am Übertragsausgang über die Leitung 11 ein Übertragssignal abgibt, das den Takteingängen der D-Flipflops 16 und 18 zugeführt wird. Damit schaltet das D- Flipflop 18 ebenfalls in die Arbeitslage, während das D- Flipflop 16 darin noch bleibt.
- Da nun beide D- Flipflops 16 und 18 in der Arbeitslage sind, erzeugt das UND- Glied 20 am Ausgang 21 ein Freigabesignal für die Ansteuerung der Magneten der entsprechenden Druckelemente, und außerdem führt die Umschaltanordnung 12 nunmehr das über den Eingang 3 zugeführte Taktsignal dem Zähler 10 zu. Dieses Taktsignal hat eine derartige feste Frequenz f2, daß der Zähler 10 während der Zeitdauer, die die Magnete erregt bleiben müssen, nach der Erzeugung des Übertragssignals wieder von der Anfangsstellung beginnend die Endstellung erreicht, bei der wieder ein Übertragssignal auf der Leitung 11 erzeugt wird. Es sei bemerkt, daß statt dessen der Zähler auch von der Endstellung ausgehend bis zur Anfangsstellung zurückzählen kann, wenn dies technisch günstiger ist.
- Dieser zeitliche Ablauf der Zählerstellungen ist in Fig. 4 näher dargestellt. Zum Zeitpunkt t0 ist das Drucksignal DS erschienen, wodurch die Zählerstellung auf den Korrekturwert K gesetzt wurde, und danach zählt der Zähler mit der von der Druckkopfgeschwindigkeit abgeleiteten Frequenz f1 weiter bis zum Erreichen der Endstellung E. Dabei verstreicht die Kompensationszeit tk, die, wie bereits erwähnt, eine Druckkopf - wegabhängige Zeit darstellt.
- Zum Zeitpunkt t1 hat der Zähler die Endstellung E erreicht, und er beginnt wieder von neuem zu zählen, nun jedoch mit der Frequenz f2 des Signals, das dem Eingang 3 des Umschalters 12 in Fig. 3 zugeführt ist.
- Nach Ablauf der Zeitdauer ta, die der Ansteuerzeit der Druckmagnete entspricht, erreicht der Zähler ein zweites Mal die Endstellung E, nämlich zum Zeitpunkt t2, und auf der Leitung 11 in Fig. 3 erscheint wieder ein Übertragssignal, das das D- Flipflop 16 in die Ruhelage schaltet, da auf der Leitung 19 wegen der Arbeitslage des D- FlIpflops 18 eine logische "0" vorhanden ist. Das D- Flipflop 18 bleibt in der Arbeitslage. Damit endet das von dem UND- Glied 20 am Ausgang 21 erzeugte Signal, während ferner der Umschalter 12 weitergeschaltet wird, so daß der Zähler 10 das am Eingang 4 zugeführte Taktsignal mit der Frequenz f3 erhält. Diese Frequenz bestimmt die Pausenzeit tp bis zum Zeitpunkt t3, die so bemessen ist, daß die Summe aller drei Abschnitte tk, ta und tp größer ist als die Periodendauer tr der Betätigung der Druckelemente.
- Wenn der Zähler 10 zum Zeitpunkt t3 wieder seine Endstellung E erreicht hat, erzeugt er auf der Leitung 11 ein Übertragssignal, das das D- Flipflop 18 in die Ruhelage schaltet, während das D- Flipflop 16 in dieser Ruhelage bereits war und bleibt. Damit wird nun wieder das UND- Glied 22 freigegeben, um mit dem folgenden Drucksignal DS das davon abgeleitete Signal DS' auf der Leitung 23 zu erzeugen. Ein eventuell vorher aufgetretenes Drucksignal wird unterdrückt, d.h. führt nicht zu einer Ansteuerung der Druckelemente.
- Mit der Rückkehr beider D- FlIpflops 16 und 18 in die Ruhelage wird nun außerdem der Umschalter 12 wieder so umgeschaltet, daß der Zähler 10 das Ruhesignal am Eingang 1 empfängt und vorzugsweise in der Endstellung stehen bleibt, wie in Fig. 4 dargestellt ist.
- Auf diese Weise wird mit Hilfe eines einzigen Zählers nicht nur die Erregungszeit der Druckmagnete bestimmt, sondern außerdem der korrekte Auslösepunkt der Druckmagnete bestimmt und gleichzeitig überwacht, daß die maximale Betätigungsfrequenz der Druckelemente nicht überschritten wird. Die D- Flipflops 16 und 18 stellen einen Zähler mit vier Stellungen dar, der jedoch auch auf beliebige andere Weise realisiert werden kann.
- Die beschriebene Anordnung ist mindestens für jede Gruppe von Drucknadeln erforderlich, die mit dem Druckraster zusammenfallen. Es ist jedoch auch möglich, für jedes Druckelement eine derartige Anordnung vorzusehen, wobei das über die Leitung 24 zugeführte Drucksignal direkt einem bestimmten Druckelement zugeordnet ist, dessen Druckmagnet über die Leitung 21 individuell angesteuert wird.
- Eine andere Schaltungsanordnung, bei der die Verzögerung der Drucksignale durch Schieberegister vorgenommen wird, ist in Fig. 5 dargestellt. Darin ist eine Verzögerungsanordnung 30 vorhanden, die von der Anordnung der Druckelemente im Druckkopf zeitlich abhängigen Drucksignale an den Ausgängen 36 bis 39 erzeugt, wie dies in der älteren, nicht vorveröffentlichten Anmeldung P 39 07 080.8 beschrieben ist. Diese verzögerten Drucksignale werden aus einem über die Leitung 35 zugeführten Signal abgeleitet, das von der Dichte des Druckrasters abhängt und das durch ein Taktsignal auf der Leitung 31 durch die Anordnung 30 durchgeschoben wird, wobei die Frequenz f1 dieses Taktsignals von den Positionsimpulsen des Druckkopfes abgeleitet ist.
- Der Korrekturwert K wird auf entsprechende Weise wie in Fig. 1 angedeutet erzeugt und über die Mehrfachleitung 14 kodiert einem Dekodierer 32 zugeführt, der diesen Korrekturwert K in eine 1-aus-n-Darstellung auf der Vielfachleitung 33 umsetzt. Diese Vielfachleitung 33 führt auf die parallelen Setzeingänge einer Anzahl Schieberegister 40, 42, 44 bis 46, deren Ladeeingang mit jeweils einem der Ausgänge 36 bis 39 der Anordnung 30 verbunden ist und bei einem Signal auf einem Ausgang den momentanen dekodierten Korrekturwert in das betreffende Schieberegister einschreibt. Das bedeutet, daß eine bestimmte Stufe in dem Schieberegister auf einen ersten binären Wert gesetzt wird, beispielsweise logisch "1", während zumindest eine Anzahl davor liegender Stufen den anderen binären Wert enthalten. Dieser logische Wert "1" wird anschließend mit dem Taktsignal mit der Frequenz f1 auf der Leitung 31 weitergeschoben, bis er am Ende des Schieberegisters ankommt.
- Die Ausgänge 41, 43, 45 bis 47 der Schieberegister 40, 42, 44 bis 46 führen auf je ein UND- Gatter 60, 62, 64 bis 66, das am anderen, nicht näher bezeichneten Eingang gegebenenfalls verzögerte Signale aus einem Zeichengenerator erhält. Die Ausgänge der UND- Gatter steuern Zählanordnungen 50, 52, 54 bis 56 an, die ähnlich der in Fig. 3 dargestellten Schaltung aufgebaut sein können, jedoch hier nur abwechselnd entweder im Ruhezustand sind oder mit Taktsignalen mit den Frequenzen f2 bzw. f3 weitergezählt werden. Die Ausgänge 51, 53, 55 bis 57 der Zählanordnungen steuern dann die Elektromagnete von Drucknadeln an. Mit den Zählanordnungen 50, 52, 54 bis 56 werden die Zeitdauer der Ansteuerung der Elektromagnete und die anschließenden Pausenzeiten bestimmt, während die Schieberegister 40, 42, 44 bis 46 die von der Druckkopfgeschwindigkeit abhängige Verzögerung der an den Ausgängen 36 bis 39 der Anordnung 30 erzeugten Drucksignale bewirken. Die momentane Druckkopfgeschwindigkeit ist dabei sowohl in dem über die Verbindung 14 zugeführten Korrekturwert K als auch in der Frequenz f1 des Taktsignals auf der Leitung 31 enthalten.
- Der Aufbau der Korrekturanordnung 8 (Fig. 2) zur Erzeugung des Korrekturwertes K ist in Fig. 6 näher dargestellt. Diese enthält zwei Register 70 und 80 für je ein Datenwort mit einer Anzahl Bits, denen über einen Eingang 25 parallel jeweils ein Datenwort zugeführt wird, das in das Register 70 mit einem Schreibsignal auf der Leitung 27 und in das Register 80 mit einem Schreibsignal auf der Leitung 29 eingeschrieben wird.
- Der Ausgang des Registers 70 führt auf die parallelen Setzeingänge 71 eines Zählers 72, der an seinem Zähleingang Taktsignale konstanter Frequenz über die Leitung 9 empfängt. In das Register 70 ist dabei ein Wert eingeschrieben worden, der der Nadelflugzeit der Drucknadel eines Druckelements entspricht, bezogen auf die Taktsignale auf der Leitung 9, d.h. wenn der Zähler 72 durch ein Setzsteuersignal auf der Leitung 75 auf diesen Wert gesetzt wird, erreicht er während der gesamten Nadelflugzeit gerade seine Endstellung und erzeugt am Ausgang 73 ein Übertragssignal.
- Der Ausgang des Registers 80 ist mit Setzeingängen 81
eines Zählers 82 verbunden, der an seinem Zähleingang die über die Leitung 26 zugeführten Positionsimpulse empfängt. Der in das Register 80 eingeschriebene Wert entspricht dem Weg des Druckelements während der Nadelflugzeit bei maximaler Geschwindigkeit des Druckelements, d.h. bezogen auf Fig. 1 der Anzahl Positionsimpulse bei der Bewegung des Druckelements D vom Punkt P2 bis zum Druckpunkt P1. Wenn mit dem Setzsteuersignal auf der Leitung 75 beide Zähler 72 und 82 gleichzeitig auf ihre jeweiligen Stellungen gesetzt werden, erreicht bei maximaler Geschwindigkeit des Druckelements, d.h. bei höchster Frequenz der Positionsimpulse auf der Leitung 26, der Zähler 82 gerade seine Endstellung, wenn der Zähler 72 seine Endstellung erreicht und ein Übertragssignal auf der Leitung 73 abgibt. Wenn das Druckelement sich jedoch langsamer bewegt, erscheinen bis zum Auftreten des Übertragssignals auf der Leitung 73 weniger Positionsimpulse auf der Leitung 26, so daß der Zähler 82 dann noch nicht seine Endstellung erreicht hat. Die dann erreichte Stellung, genauer die Differenz bis zur Endstellung, gibt die Verzögerungszeit, insbesondere die Anzahl Positionsimpulse an, um die das Ansteuersignal auf der Leitung 21 in Fig. 2 gegenüber dem Drucksignal auf der Leitung 24 in der Verzögerungsanordnung 6 verzögert werden muß. Das Komplement dieser Zählerstellung wird mit dem Übertragssignal auf der Leitung 73 in ein Register 84 eingeschrieben, an dessen Ausgang 14 dann der aktuelle Korrekturwert erscheint. - Das Übertragssignal auf der Leitung 73 steuert ferner ein Verzögerungsglied 74 an, das das Setzsteuersignal auf der Leitung 75 erzeugt. Das Verzögerungsglied 74 dient dazu, insbesondere die korrekte Übernahme des Zählerstandes des Zählers 82 in das Register 84 zu gewährleisten, bevor der Zähler 82 erneut durch das Setzsteuersignal auf der Leitung 75 gesetzt wird. Das Schreibsignal auf der Leitung 27 steuert ebenfalls das Verzögerungsglied 74 an, um die Ermittlung des Korrekturwertes zu starten. Bei Verwendung entsprechender Bauelemente bzw. Schaltungstechnik kann das Verzögerungsglied 74 auch weggelassen werden.
- Bei der Schaltung in Fig. 6 kann ein Übertragssignal auf der Leitung 83 nicht eher erscheinen, als der Zähler 72 ein Übertragssignal auf der Leitung 73 erzeugt hat. Wenn jedoch durch einen Fehlerfall, beispielsweise durch Störimpulse, zuerst der Zähler 82 seine Endstellung erreicht hat, liegt ein Fehler vor, der zu einem falschen Korrekturwert führt. Um diesen Fehlerfall zu erkennen, ist ein UND- Glied 76 vorgesehen, das auf der Ausgangsleitung 77 ein Signal abgibt, wenn das Übertragssignal auf der Leitung 83 erscheint, während noch kein Übertragssignal auf der Leitung 73 aufgetreten ist. Der Ausgang 77 ist mit dem D- Eingang eines D-Flipflops 78 verbunden, das mit dem nächsten Taktsignal auf der Leitung 9 das Signal auf der Leitung 77 übernimmt und am Ausgang 79 abgibt. Dies kann bereits als Fehlersignal ausgewertet werden.
- Um jedoch unnötige Fehlermeldungen zu vermeiden, bei denen beide Zähler 72 und 82 nahezu gleichzeitig ihre Endstellung erreicht haben, lediglich der Zähler 82 um eine Taktimpulsperiode früher, ist eine Verzögerung des Fehlersignals mit Hilfe eines UND-Gliedes 86 und eines D-Flipflops 88 vorgesehen. Nur wenn das D-Flipflop 78 gesetzt ist, und die Fehlerbedingung besteht weiterhin, wird durch die entsprechenden Signale auf den Leitungen 77 und 79 das UND-Glied 86 freigegeben, dessen Ausgang den D- Eingang des Flipflops 88 ansteuert, und mit dem nächsten Taktimpuls auf der Leitung 9 wird das Flipflop 88 gesetzt und gibt am Ausgang 89 ein Fehlersignal ab. Wenn dagegen mit dem nächsten Taktsignal auf der Leitung 9 nach dem Erreichen der Endstellung des Zählers 82 der Zähler 72 ebenfalls seine Endstellung erreicht hat, wird zwar das Flipflop 78 noch gesetzt, jedoch verschwindet danach das Signal am Ausgang 77 des UND-Gliedes 76, so daß das Flipflop 88 dann nicht mehr gesetzt wird. Dabei entsteht dann der richtige Korrekturwert Null am Ausgang 14.
- Durch die Verwendung der Register 70 und 80 können die Vorgabewerte für die Zähler 72 und 82 leicht geändert werden. Wenn beispielsweise die maximale Druckkopfgeschwindigkeit verringert wird, etwa für den Druck in einem besonders engen Druckraster für eine hohe Druckqualität, kann der Wert im Register 80 entsprechend verringert werden, wobei dann allerdings der Abstand bzw. die Verschiebung der Drucksignale gegenüber den zu druckenden Punkten ebenfalls geringer gewählt werden muß.
- Der in das Register 70 eingeschriebene Wert, wird verringert, wenn statt eines Blattes ein dickerer Formularsatz bedruckt werden soll, da dann die Nadelflugzeit kürzer ist. Unter Verringern ist dabei verstanden, daß die Zähler 72 bzw. 82 dann eine geringere Anzahl Impulse am Zähleingang benötigen, um die Endstellung zu erreichen, wofür die Zähler an den Setzeingängen 71 bzw. 81 beispielsweise die Komplementwerte der in die Register 70 bzw. 80 eingeschriebenen Werte erhalten.
- Die Verzögerung der Drucksignale kann abhängig von der Druckkopfgeschwindigkeit auch durch andere technische Möglichkeiten erreicht werden. Beispielsweise durch Verwendung von analoge steuerbaren Verzögerungselementen.
Claims (8)
- Schaltungsanordnung zur Ansteuerung der mechanischen Druckelemente eines Matrixdruckers, die in einem längs der Druckzeile (L) bewegten Druckkopf (D) angeordnet sind und die die zu druckenden Zeichen durch Druckpunkte erzeugen, die in einem vorgegebenen Druckraster angeordnet sind, wobei eine Steueranordnung für jedes Druckelement individuell ein Drucksignal erzeugt, wenn dieses Druckelement eine Position, die um einen bestimmten Druckweg vor einer vorgesehenen Druckstelle (P) auf einem Aufzeichnungsträger liegt, erreicht hat,
dadurch gekennzeichnet, daß denjenigen Druckelementen (7) im Druckkopf (D), eine Verzögerungsanordnung (6) zugeordnet ist, die bei Ansteuerung durch ein Drucksignal (24) nach einer Verzögerung, die durch die Druckkopfgeschwindigkeit bestimmt ist, ein Ansteuersignal (21) für die unmittelbare mechanische Aktivierung des zugehörigen Druckelements (7) startet. - Schaltungsanordnung nach Anspruch 1,
dadurch gekennzeichnet, daß die Verzögerungsanordnung (6) ein Zähler (10) ist und das Drucksignal (DS) den Zähler (10) auf einen von der Druckkopfgeschwindigkeit abhängigen Korrekturwert setzt und der Zähler (10) danach mittels dem Zählimpulseingang zugeführter Zählimpulse bis zu einem Endwert zählt und bei Erreichen dieses Endwertes das Ansteuersignal startet. - Schaltungsanordnung nach Anspruch 1,
dadurch gekennzeichnet, daß die Verzögerungsanordnung (6) ein Schieberegister (40, 42, 44 bis 46) ist und das Drucksignal (DS) einen ersten binären Wert in eine durch einen von der Druckkopfgeschwindigkeit abhängigen Korrekturwert bestimmte Stufe des Schieberegisters einschreibt und der Inhalt des Schieberegisters (40,42,44 bis 46) danach mittels Schiebeimpulse weitergeschoben wird und das Eintreffen des ersten binären Werts in einer vorgegebenen Stufe des Schieberegisters das Ansteuersignal (21) startet. - Schaltungsanordnung nach Anspruch 2 oder 3,
dadurch gekennzeichnet, daß die Zählimpulse bzw. Schiebeimpulse von Positionsimpulsen (26) abgeleitet sind, die bei der Bewegung des Druckkopfes (D) erzeugt werden. - Schaltungsanordnung nach Anspruch 4,
dadurch gekennzeichnet, daß zur Erzeugung des Korrekturwertes (14) eine Korrekturanordnung (8) vorgesehen ist, die einen ersten Zähler (72) mit parallelen Setzeingängen (71), der an seinem Zähleingang ein Taktsignal (9) konstanter Frequenz und an seinen Setzeingängen (71) einen der Druckverzögerungszeit zwischen der Aktivierung des Druckelements (7) und dessen Auftreffen auf dem Aufzeichnungsträger entsprechenden Wert mit Bezug auf das Taktsignal erhält, und einen zweiten Zähler (82) mit parallelen Setzeingängen (81) enthält, der an seinem Zähleingang die Positionsimpulse (26) und an seinen Setzeingängen (81) einen dem bestimmten Druckweg bei maximaler Geschwindigkeit des Druckelements (7) entsprechenden Wert erhält, daß beide Zähler (72, 82) dasselbe Setzsteuersignal (75) erhalten, und daß ein Übertragssignal (73) des ersten Zählers (72) einen von der dann erreichten Stellung des zweiten Zählers (82) abgeleiteten Wert als Korrekturwert (14) an die Verzögerungsanordnung (6) abgibt. - Schaltungsanordnung nach Anspruch 5,
dadurch gekennzeichnet, daß das Auftreten eines Übertragssignals (83) des zweiten Zählers (82) vor dem Auftreten des Übertragssignals (73) des ersten Zählers (72) ein Fehlersignal (89) erzeugt. - Schaltungsanordnung nach Anspruch 6,
dadurch gekennzeichnet, daß das Fehlersignal (89) mindestens um eine Taktperiode verzögert von der Auftrittsbedingung der beiden Übertragssignale (73, 83) abgeleitet ist und daß das Fehlersignal (89) unterdrückt ist, wenn innerhalb der Verzögerungszeit der Fehlermeldung noch ein Übertragssignal (73) des ersten Zählers (72) auftritt. - Schaltungsanordnung nach Anspruch 2,
dadurch gekennzeichnet, daß der Zähler (10) nach dem Erreichen des ersten Endwertes (E) den Zählimpulseingang auf die Zählimpulse einer konstanten zweiten Frequenz (f2) entsprechend der Aktivierungszeit eines Druckelements (D) umschaltet und der beim erneuten Erreichen der Endstellung (E) das erste Ansteuersignal beendet und den Zählimpulseingang auf Zählimpulse mit einer dritten Frequenz (f3) umschaltet, die so gewählt ist, daß der Zähler (10) bei maximaler Druckkopfgeschwindigkeit die Endstellung (E) zum dritten Male erreicht, nachdem seit dem Drucksignal (DS) mindestens eine vorgegebene Druckelement-Periodendauer (tr)verstrichen ist, wobei bis zu diesem Zeitpunkt weitere Drucksignale (DS) gesperrt sind.
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE19893922616 DE3922616A1 (de) | 1989-07-10 | 1989-07-10 | Schaltungsanordnung fuer einen matrixdrucker |
| DE3922616 | 1989-07-10 | ||
| DE4007537 | 1990-03-09 | ||
| DE19904007537 DE4007537A1 (de) | 1990-03-09 | 1990-03-09 | Schaltungsanordnung fuer einen matrixdrucker |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP0408122A2 EP0408122A2 (de) | 1991-01-16 |
| EP0408122A3 EP0408122A3 (en) | 1992-01-29 |
| EP0408122B1 true EP0408122B1 (de) | 1996-12-18 |
Family
ID=25882843
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP90201800A Expired - Lifetime EP0408122B1 (de) | 1989-07-10 | 1990-07-05 | Schaltungsanordnung für einen Matrixdrucker |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US5312193A (de) |
| EP (1) | EP0408122B1 (de) |
| JP (1) | JPH03110178A (de) |
| DE (1) | DE59010608D1 (de) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3495747B2 (ja) * | 1991-07-22 | 2004-02-09 | セイコーエプソン株式会社 | プリンタの印字制御方法及び装置 |
| JPH0725103A (ja) * | 1993-07-15 | 1995-01-27 | Canon Inc | プリンタ装置及びプリント方法 |
| JP2937712B2 (ja) * | 1993-10-22 | 1999-08-23 | 沖電気工業株式会社 | ワイヤドットヘッドのワイヤ動作検出装置 |
| JP3258878B2 (ja) * | 1994-12-02 | 2002-02-18 | セイコーエプソン株式会社 | サーマルヘッドの駆動制御方法およびその装置 |
| KR0185048B1 (ko) * | 1996-06-20 | 1999-05-15 | 김광호 | 스텝모터의 위치 제어와 인자헤드의 인자 제어 장치 및 방법 |
| US5803628A (en) * | 1996-07-01 | 1998-09-08 | Xerox Corporation | Printing apparatus including encoder pending |
| US5819649A (en) * | 1997-02-12 | 1998-10-13 | Illinois Tool Works Inc. | System and method for printing on a moving substrate |
| US6563600B1 (en) * | 1999-08-30 | 2003-05-13 | Xerox Corporation | System for enabling a printing apparatus to operate at multiple selectable speeds |
| US6981254B2 (en) * | 2001-02-01 | 2005-12-27 | Hewlett-Packard Development Company, L.P. | Delay timer for printing from the driver |
| JP2005096377A (ja) * | 2003-09-26 | 2005-04-14 | Brother Ind Ltd | 印刷装置及び印刷方法 |
| DE102010017004B4 (de) * | 2010-05-18 | 2017-11-02 | Océ Printing Systems GmbH & Co. KG | Bearbeitungseinrichtung und Verfahren zum Ansteuern einer Bearbeitungseinrichtung |
| CN109177507B (zh) * | 2018-10-11 | 2019-11-26 | 福建星谷信息科技有限公司 | 一种针式打印机自动双向打印调直系统及方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4010835A (en) * | 1975-08-01 | 1977-03-08 | International Business Machines Corporation | Matrix print head |
| DE2751326C3 (de) * | 1977-11-17 | 1985-05-09 | Dr.-Ing. Rudolf Hell Gmbh, 2300 Kiel | Verfahren zum Aufzeichnen von Schrift- oder Bildinformationen |
| US4189246A (en) * | 1977-12-22 | 1980-02-19 | International Business Machines Corporation | Variable print-hammer control for on-the-fly-printing |
| DE3014338A1 (de) * | 1980-04-15 | 1981-10-29 | Triumph-Adler Aktiengesellschaft für Büro- und Informationstechnik, 8500 Nürnberg | Verfahren zum positionsgenauen drucken bei mosaikdruckern |
| US4407193A (en) * | 1980-06-16 | 1983-10-04 | International Business Machines Corporation | Solenoid impact print hammer with uniform free flight time |
| JPS5779761A (en) * | 1980-11-05 | 1982-05-19 | Sony Corp | Drive method for thermo-sensing picture display device |
| US4487515A (en) * | 1982-07-19 | 1984-12-11 | Genicom Corporation | Multiple action print head control circuit for a dot matrix printer |
| JPS60124257A (ja) * | 1983-12-08 | 1985-07-03 | Ricoh Co Ltd | 信号処理装置 |
| JP2511893B2 (ja) * | 1986-08-15 | 1996-07-03 | 沖電気工業株式会社 | プリンタの印字ヘッド駆動装置 |
| JPS63107576A (ja) * | 1986-10-23 | 1988-05-12 | Brother Ind Ltd | シリアルプリンタ |
-
1990
- 1990-07-05 EP EP90201800A patent/EP0408122B1/de not_active Expired - Lifetime
- 1990-07-05 DE DE59010608T patent/DE59010608D1/de not_active Expired - Fee Related
- 1990-07-10 JP JP2180703A patent/JPH03110178A/ja active Pending
-
1993
- 1993-02-17 US US08/018,902 patent/US5312193A/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH03110178A (ja) | 1991-05-10 |
| US5312193A (en) | 1994-05-17 |
| EP0408122A3 (en) | 1992-01-29 |
| DE59010608D1 (de) | 1997-01-30 |
| EP0408122A2 (de) | 1991-01-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0408122B1 (de) | Schaltungsanordnung für einen Matrixdrucker | |
| DE1237816B (de) | Druckhammerantrieb fuer Schnelldrucker | |
| DE3036919C2 (de) | Druckhammerantieb für einen Punktmatrixdrucker | |
| DE2635398C2 (de) | Verfahren und Anordnung zur Ansteuerung der Druckmagnete eines Matrixdruckers | |
| DE3223274A1 (de) | Schlagdrucker | |
| DE2629235A1 (de) | Druckvorrichtung fuer rechen-, buchhaltungs- und aehnliche druckmaschinen | |
| DE2647260C2 (de) | Matrixdrucker | |
| EP0389016B1 (de) | Matrixdrucker | |
| DE2044409C3 (de) | Zeilenschlagdrucker | |
| DE102010017004A1 (de) | Verfahren zum Ansteuern einer Bearbeitungseinrichtung und derart angesteuerte Bearbeitungseinrichtung | |
| DE2456809C2 (de) | Steuervorrichtung für ein Druckwerk | |
| DE2806360C3 (de) | Schaltung zum laufenden Bestimmen des Zeitpunktes der Tröpfchenaufladung in einem Tintenstrahldrucker | |
| DE3922616A1 (de) | Schaltungsanordnung fuer einen matrixdrucker | |
| EP0140389B1 (de) | Verfahren und Anordnung zur Reduzierung des Druckversatzes in bidirektional druckenden Matrixdruckeinrichtungen | |
| DE2414335C3 (de) | Druckvorrichtung | |
| DE2461555A1 (de) | Herstellverfahren und schlagvorrichtung fuer jacquardkarten | |
| DE2364533C3 (de) | Steuereinrichtung für einen Drucker mit einem Tabulierregister zum Speichern mehreren Tabulierstellen | |
| AT224367B (de) | ||
| DE4007537A1 (de) | Schaltungsanordnung fuer einen matrixdrucker | |
| DE1549807A1 (de) | Zungenbetaetigter Drucker | |
| DE1912661A1 (de) | Anordnung zum Ansteuern der Typenhebel einer Typenhebelschreibmaschine | |
| DE2264068A1 (de) | Druckvorrichtung | |
| DE1561210C3 (de) | Steuereinrichtung an einem speichergesteuerten Typenhebel-Druckwerk zur Erhöhung der Schreibgeschwindigkeit | |
| DE2156213C3 (de) | Steuereinrichtung zur überlappenden Betätigung von Typenhebeln | |
| DE1449634C (de) | Anordnung zur Aufzeichnung von Zeichen Ausscheidung aus R25262 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): DE FR GB IT SE |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): DE FR GB IT SE |
|
| RHK1 | Main classification (correction) |
Ipc: B41J 2/51 |
|
| 17P | Request for examination filed |
Effective date: 19920724 |
|
| 17Q | First examination report despatched |
Effective date: 19940406 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: PSI PRINTER SYSTEMS INTERNATIONAL GMBH |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| ITF | It: translation for a ep patent filed |
Owner name: DE DOMINICIS & MAYER S.R.L. |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE FR GB IT SE |
|
| REF | Corresponds to: |
Ref document number: 59010608 Country of ref document: DE Date of ref document: 19970130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Effective date: 19970318 |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 19970313 |
|
| ET | Fr: translation filed | ||
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20000622 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20000705 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20010606 Year of fee payment: 12 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20010705 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20010705 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20020329 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20030201 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES;WARNING: LAPSES OF ITALIAN PATENTS WITH EFFECTIVE DATE BEFORE 2007 MAY HAVE OCCURRED AT ANY TIME BEFORE 2007. THE CORRECT EFFECTIVE DATE MAY BE DIFFERENT FROM THE ONE RECORDED. Effective date: 20050705 |