EP0159383B1 - Maschine zum Schleifen von torischen Oberflächen an optischen Linsen - Google Patents
Maschine zum Schleifen von torischen Oberflächen an optischen Linsen Download PDFInfo
- Publication number
- EP0159383B1 EP0159383B1 EP84104714A EP84104714A EP0159383B1 EP 0159383 B1 EP0159383 B1 EP 0159383B1 EP 84104714 A EP84104714 A EP 84104714A EP 84104714 A EP84104714 A EP 84104714A EP 0159383 B1 EP0159383 B1 EP 0159383B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- holder
- rotating arm
- machine frame
- machine
- bearing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired
Links
- 230000003287 optical effect Effects 0.000 title claims description 3
- 238000004519 manufacturing process Methods 0.000 description 9
- 230000008859 change Effects 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000002411 adverse Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B13/00—Machines or devices designed for grinding or polishing optical surfaces on lenses or surfaces of similar shape on other work; Accessories therefor
- B24B13/04—Machines or devices designed for grinding or polishing optical surfaces on lenses or surfaces of similar shape on other work; Accessories therefor grinding of lenses involving grinding wheels controlled by gearing
Definitions
- the invention relates to a machine for grinding toric surfaces on optical lenses, with a machine frame, a first holder and a second holder, wherein in one holder a headstock with a tool spindle carrying a pot tool and in the other holder a receiving device for the to be machined Lens is held and wherein the first holder is pivotable about a first axis, the distance from the interface of the pot tool is adjustable according to the desired radius of the base curve of the torus surface.
- Machines of this type are often used for the manufacture of spectacle lenses, in particular also for the so-called prescription manufacture, in which the lenses are made to order with a certain refractive power.
- toric surfaces two radii must be observed, namely the radius of the so-called base curve and the other the radius of the so-called cross curve.
- the base curve is determined by the length of the swivel arm and the cross curve by the inclined position of the cup wheel.
- the first holder is located on a swivel arm which projects cantilevered from a swivel bearing.
- a slide can be moved relative to the swivel axis, which carries an electric motor on whose shaft the pot tool sits.
- the second holder is displaceable in a slide guide, which is shorter than the slide, so that it can protrude relatively far beyond the guide.
- the invention has for its object to design a machine of the type mentioned in such a way that the machine parts are supported so that no deformations dependent on the respective setting position occur which adversely affect the work result.
- the first holder is rotatably supported on the machine frame via a cross support and has a swivel arm connected to the first holder in a rotationally fixed manner, along which a swivel arm bearing is displaceable, which consists of a relative to the machine frame together with the swivel arm rotatable and on this lockable swivel arm holder and a non-rotatable relative to the machine frame, but in this displaceable and lockable on this swivel arm bracket, and that the second holder is adjustable according to the desired radius of the transverse curve of the toroidal surface about a second axis in different rotational positions.
- the swivel arm is not loaded with the weight of those parts which are connected to the swivel arm; rather, this weight is transferred to the machine frame via the cross support.
- the swivel arm now only serves as a guide ruler that guides the first holder on the desired circular path. Bends of the swivel arm due to weight forces are thus completely avoided, so that more precise work results are achieved in comparison with machines in which high weights cause different deformations with different setting positions. Since the movements are controlled purely mechanically, the machine does not require any control effort to coordinate movements. It is therefore extremely simple.
- the setting is made solely by moving the swivel arm bearing and by turning the second holder accordingly. Stencil sets are therefore not required.
- the radii can be changed in arbitrarily small steps, which is advantageous compared to a machine that requires a separate template for each radius.
- the arrangement of the swivel arm below the cross support in a housing-like machine frame is particularly expedient in terms of construction (claim 2).
- the space below the machine is used, which must have a height that enables comfortable work anyway.
- a locking device has the advantage that adjustment work is facilitated, since the locking device ensures without careful adjustment according to scales that the two guides, along which the pivot bearing must be moved, are exactly parallel to each other.
- the locking device can be designed differently. A particularly useful construction for this is specified in claim 4.
- the pivot bearing is preferably attached by means of a in the housing ordered spindle shifted (claim 5). Such a spindle can be driven both by hand and by means of an electric motor.
- the respective position of the swivel bearing can be displayed, for example, by means of a counter which shows the revolutions of the adjusting spindle.
- the second holder has a bearing ring resting on the machine frame and comprising the cross support.
- the second holder is supported very stably on the machine frame.
- the weight loads do not change, which means that no different deformations occur with different setting positions.
- a pot tool T 1 is shown in section.
- the pot tool has a circular cutting edge 1 and can be driven at high speed about an axis 2.
- a lens L 1 is to be machined with the pot tool T 1 , ie a concave-toric surface 3 is to be produced on it.
- the lens L 1 is seated in a lens holder which is pivotable about a fixed point 4 on a circular path, so that the lens surface 3 completely passes the cutting edge 1.
- One end position of the lens L 1 is shown with solid lines and the other end position with dashed lines.
- the lens L 1 is shown in a diametrical section, so that the base curve appears there as a section line through the concave-toric surface, the radius of which is denoted by r e in FIG. 1.
- the radius r B is equal to the distance between points 4 and 5.
- the transverse curve is determined by the inclination of axis 2 relative to the Y axis.
- the larger the inclination angle a the smaller the radius of the transverse curve. If the angle a is 90 °, the radius of the transverse curve is equal to the radius of the cutting edge 1.
- a transverse curve with an even smaller radius cannot be produced for a given cup wheel T 1 .
- the smaller the angle a the larger the radius of the cross curve.
- a pot tool T 2 which has a cutting edge 6, which in this case lies on the inner edge of the end face of the tool.
- the lens L 2 is held so that it is pivotable about a fixed point 4 '.
- the radius r ' e is equal to the distance between points 4' and 5 '.
- the radius of the transverse curve is determined by the inclination angle a 'of the axis 2' of the pot tool T 2 relative to the Y axis.
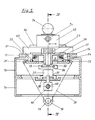
- the machine has a machine frame 7 with a lower part 7a and an upper part 7b.
- the machine frame 7 carries a cross support, designated overall by 8, on which a first holder 9 is arranged.
- a second holder 10 is supported on the machine frame upper part 7b via a bearing ring 11.
- Within the housing-like machine frame 7 be there is a total of 12 pivot arm bearing about which a pivot arm 13 is rotatable. The nature and the interaction of these components are described in detail below.
- the cross support 8 has a first carriage 14, which is guided in a straight line via a roller guide on the machine frame upper part 7b.
- a second carriage 16 is guided in a straight line by means of a roller guide 17 (see FIG. 5).
- the guideways 15 and 17 are exactly perpendicular to each other.
- the direction of movement of the first carriage 14 is denoted by X and the direction of movement of the second carriage 16 by Y.
- the first carriage 14 can be driven by a motor.
- an electric motor 18 is provided, which is designed as a geared motor and carries a sprocket 19 on its output shaft, over which a chain 20 is placed.
- the chain 20 is guided over deflection wheels 21, 22 and its ends are connected to the first carriage 14 at fastening points 23 and 24.
- the first holder 9 is rotatably supported by means of a pin 25 located thereon, which engages in a bearing sleeve 26 located on the second carriage 16.
- An arm 27 protrudes from the pin 25 and carries a rod 29 which can be displaced by means of a handwheel 25 and on which a lens holder 30 is located.
- the lens holder 30 is displaceable along the axis 31 for adjustment purposes.
- the pivot arm 13 is attached. This is non-rotatable relative to the pin 25, which is shown in the drawing by the square 25a.
- the swivel arm 13 extends symmetrically to its attachment point. The two sections are designated 13a and 13b.
- the swivel arm bearing 12 consists of a swivel arm holder 32 and a swivel arm bearing block 33.
- the swivel arm 13 has a dovetail-shaped cross section which engages in a groove 34 of the swivel arm holder 32, which likewise has a dovetail-shaped cross section Has.
- the bearing block 33 (see FIG. 5) has a guide groove 37 with a dovetail cross section. One reaches into this groove.
- Guide bar 38 which also has a dovetail cross-section.
- the guide groove 38 is located on the machine frame lower part 7a.
- the swivel arm holder 32 can be clamped against the swivel arm 13 and the bearing block 33 against the guide bar 38. Pressure plates 39 and 40 are provided for this purpose.
- the pressure plate 39 is located in a space 41 within the swivel arm holder and the pressure plate 40 within a space 42 in the bearing block 33.
- the two spaces communicate via a bore 43 which is located in the swivel arm holder 32.
- Compressed air can be supplied to the two rooms 41 and 42 via a bore 44.
- the possibility of compressed air supply and compressed air discharge is symbolically represented by a double arrow 45.
- the pressure plate 39 is pressed against the swivel arm 13 and the pressure plate 40 against the guide bar 38, after which a displacement of the bearing block and the swivel arm holder is no longer possible.
- the bearing block 33 is encompassed by a sliding part 46, for which purpose tabs 47, 48 are located on the sliding part 46.
- the sliding part 46 contains an internal thread 49, in which an adjusting spindle 50 engages.
- the adjusting spindle 50 is rotatable but axially immovable in the lower part 7a of the machine frame.
- the adjusting spindle can be driven by means of an electric motor 51 which is coupled to the spindle via a reduction gear 52.
- the cross support 8 can be locked in relation to the machine frame 7 by means of a locking device 53.
- the locking device has a locking bolt 54, the front end 53a of which is conical and which can engage in a conical hole 55 on the second slide 16.
- a pressure medium cylinder 56 to which pressure medium can be supplied via a bore 57, serves to advance the locking bolt into the locking position.
- the possibility of supplying and removing pressure medium is symbolized by a double arrow 58.
- a spring 59 can push the locking bolt 53 back into the release position.
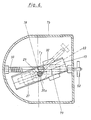
- the bearing ring 11 On the machine frame upper part 7b there is a guide collar 60 on which the bearing ring 11 is centered.
- the bearing ring 11 has a lower surface 11a, which is supported on a supporting surface 61 on the upper part 7b of the machine frame. Between the lower surface 11 and the support surface 61 there are spaces 62 into which compressed air can be introduced, which is indicated by bores 62 'which open into these spaces.
- a bracket 63 rises from the bearing ring 11, on which there is a guide bar 64 with a dovetail-shaped cross section.
- a slide 65 is guided on the guide bar 64 and has guide surfaces 66a and 66b adapted to the guide bar 64.
- the weight of the carriage is supported on support surfaces 67a, 67b of the bracket 63.
- a grinding spindle 68 is held in the slide 65, in which a spindle shaft 69 is mounted.
- a pulley 70 which can be driven by means of a drive belt 71 from a pulley 72 which is seated on the shaft 73 of an electric motor 74.
- a pot tool T j At the front end of the spindle shaft 69 there is a pot tool T j .
- the machine frame upper part 7b which interacts with a mark 76 on the bearing ring 11.
- the scale 75 is divided into degrees.
- the spindle shaft 50 is coupled to a counter 77, which also determines the number of revolutions of the adjusting spindle 70 indicates small fractions of revolutions.
- the machine works as follows. Before starting work, the machine is set according to the lens L to be produced. Before the setting of point 4 (see FIG. 1), the locking bolt 53 is snapped into the bore 55 by pressurizing the pressure medium cylinder 56. The locking hole 55 is arranged relative to the locking bolt 53 such that when the locking bolt is snapped in, the swivel arm 13 is exactly parallel to the guide bar 38 is. For the adjustment, the spaces 41, 42 are relieved of compressed air, so that the swivel arm holder 32 on the swivel arm 13 and the swivel arm bearing block on the guide bar 38 can be moved. The displacement takes place by turning the spindle 50 by means of the electric motor 51. The distance between the axes 78 and 79 is read on the counter 7.
- the counter can be calibrated so that it gives this distance directly in millimeters. If the distance is equal to the desired radius r B (see FIG. 1), the drive of the spindle is stopped and the spaces 41, 42 are pressurized with compressed air. As a result, the swivel arm holder 32 is clamped to the swivel arm and the bearing block 33 to the guide bar 38. The position of point 4 (see Fig. 1) is thus fixed.
- the bearing rim 11 is pivoted in accordance with the desired transverse curve of the lens surface 3, the mark 76 being aligned with the corresponding graduation on the scale 75.
- the spaces 62 are pressurized, an air film being formed between the surfaces 11a and 61, which enables the bearing ring 11 to be turned with low forces.
- the compressed air is released from the spaces 62, so that the bearing ring 11 rests on the support surface 61 with a high frictional force.
- the rod 29 is adjusted according to the lens thickness.
- the carriage 65 is brought into the position in which the cutting edge 1 of the pot tool T lies in the axis 78 (see FIG. 3).
- the grinding spindle 68 can also be displaced along its axis in order to bring the cutting edge into the correct position even after it has worn.
- the locking bolt 53 is pulled out of the locking bore 55 by relieving pressure in the pressure medium cylinder 56.
- the grinding spindle 68 is started and the drive of the carriage 14 is started by switching on the electric motor 18.
- the electric motor now pulls on the carriage 14, which performs a linear movement in the X direction.
- the second carriage 16 moves at right angles to the first carriage 14. This is effected by the swivel arm 13, which guides the pin 25 on a circular path.
- the second carriage moves in the Y direction.
- the coupling of the two carriages 14 and 16 to the swivel arm 13 brings about a combination of the carriage movements in the X and Y directions to form a circular path.
- the swivel arm 7 only has the task of guiding the first holder 9 on a circular path.
- the cutting edge 1 of the pot tool T cuts into the lens L 1 a toric surface.
- the radius of the transverse curve depends on the inclination angle a of the tool and on the radius of the cutting edge 1.
- the radius r B depends on the distance between the axes 79 and 78.
- the axis 79 corresponds to point 4 in FIG. 1 and the axis 78 to that in FIG Fig. 1 with 80 designated point.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Grinding And Polishing Of Tertiary Curved Surfaces And Surfaces With Complex Shapes (AREA)
Description
- Die Erfindung bezieht sich auf eine Maschine zum Schleifen von torischen Oberflächen an optischen Linsen, mit einem Maschinengestell, einem ersten Halter und einem zweiten Halter, wobei in einem Halter ein Spindelstock mit einer ein Topfwerkzeug tragenden Werkzeugspindel und im anderen Halter eine Aufnahmeeinrichtung für die zu bearbeitende Linse gehalten ist und wobei der erste Halter um eine erste Achse schwenkbar ist, deren Abstand von der Schnittstelle des Topfwerkzeuges entsprechend dem gewünschten Radius der Basiskurve der Torusfläche einstellbar ist.
- Maschinen dieser Art werden häufig für die Herstellung von Brillengläsern verwendet, insbesondere auch für die sogenannte Rezeptfertigung, bei der die Linsen auf Bestellung mit einer bestimmten Brechkraft hergestellt werden. Bei torischen Oberflächen sind zwei Radien einzuhalten, nämlich einmal der Radius der sogenannten Basiskurve und zum anderen der Radius der sogenannten Querkurve. Die Basiskurve wird bei Maschinen der genannten Art durch die Länge des Schwenkarmes und die Querkurve durch die Schrägstellung der Topfscheibe bestimmt. Bei der Rezeptfertigung kommt es in besonderem Maße darauf an, daß die beiden Einstellungen rasch und präzise vorgenommen werden können.
- Bei einer aus der DE-AS-1 252 555 bekannten Maschine der eingangs genannten Art befindet sich der erste Halter auf einem Schwenkarm, der freitragend von einem Schwenklager abragt. Auf dem Schwenkarm ist ein Schlitten relativ zur Schwenkachse verschiebbar, der einen Elektromotor trägt, auf dessen Welle das Topfwerkzeug sitzt. Der zweite Halter ist in einer Schlittenführung verschiebbar, die kürzer ist als der Schlitten, so daß dieser verhältnismäßig weit über die Führung hinausragen kann. Die erheblichen Gewichte der verschiebbaren Maschinenteile bewirken je nach Einstellage verschiedene Deformationen, was zu Herstellungsungenauigkeiten führt.
- Um auf solchen Deformationen beruhende Herstellungsungenauigkeiten zu vermeiden, wurde auch eine Maschine geschaffen (DE-PS 22 52 498), bei der der Werkstückhalter auf einer geraden Führung bewegbar und rechtwinklig zu dieser Führung heb- und senkbar ist, während der WerkZeughalter nur Schwenkbewegungen ausführt. Die Koordinierung der drei Bewegungen erfolgt mit Hilfe von auswechselbaren Steuerkurven, die mit feinfühligen Tastern abgetastet werden, die die Druckmittelzufuhr zu hydraulischen Antriebszylindern steuern. Hierfür ist ein erheblicher Steuerungsaufwand nötig. Auch wird eine große Zahl von Schablonen benötigt. Die Maschine ist deshalb teuer.
- Der Erfindung liegt die Aufgabe zugrunde, eine Maschine der eingangs genannten Art so auszubilden, daß die Maschinenteile so abgestützt sind, daß keine von der jeweiligen Einstellage abhängigen Deformationen auftreten, die das Arbeitsergebnis ungünstig beeinflussen.
- Diese Aufgabe wird nach der Erfindung dadurch gelöst, daß der erste Halter auf dem Maschinengestell über einen Kreuzsupport drehbar abgestützt ist und einen drehfest mit dem ersten Halter verbundenen Schwenkarm aufweist, längs dem ein Schwenkarmlager verschiebbar ist, das aus einem relativ zum Maschinengestell zusammen mit dem Schwenkarm drehbaren und an diesem verriegelbaren Schwenkarmhalter und einem relativ zum Maschinengestell undrehbaren, jedoch in diesem verschiebbaren und an diesem verriegelbaren Schwenkarm-Lagerbock besteht, und daß der zweite Halter entsprechend dem gewünschten Radius der Querkurve der Torusfläche um eine zweite Achse in verschiedene Drehlagen einstellbar ist.
- Bei einer so ausgebildeten Maschine wird der Schwenkarm nicht mit dem Gewicht derjenigen Teile belastet, die mit dem Schwenkarm verbunden sind ; dieses Gewicht wird vielmehr über den Kreuzsupport auf das Maschinengestell übertragen. Der Schwenkarm dient nur noch als Führungslineal, das den ersten Halter auf der gewünschten Kreisbahn führt. Verbiegungen des Schwenkarmes durch Gewichtskräfte werden damit vollständig vermieden, so daß genauere Arbeitsergebnisse erzielt werden im Vergleich mit Maschinen, bei denen hohe Gewichte unterschiedliche Deformationen bei verschiedenen Einstellagen bewirken. Da die Bewegungen rein mechanisch gesteuert werden, kommt die Maschine ohne jeden Steuerungsaufwand für die Koordinierung von Bewegungen aus. Sie ist deshalb außerordentlich einfach. Die Einstellung erfolgt alleine durch Verschiebung des Schwenkarmlagers und durch entsprechende Verdrehung des zweiten Halters. Schablonensätze werden deshalb nicht benötigt. Die Radien können in beliebig kleinen Schritten verändert werden, was im Vergleich mit einer Maschine vorteilhaft ist, die für jeden Radius eine eigene Schablone benötigt.
- Baulich besonders zweckmäßig ist die Anordnung des Schwenkarmes unterhalb des Kreuzsupports in einem gehäuseartig ausgebildeten Maschinengestell (Anspruch 2). Hierbei wird der Raum unterhalb der Maschine ausgenutzt, die ohnehin eine Bauhöhe haben muß, die ein bequemes Arbeiten ermöglicht.
- Eine Rasteinrichtung gemäß Anspruch 3 hat den Vorteil, daß Einstellarbeiten erleichtert werden, da die Verriegelungseinrichtung ohne sorgfältiges Einstellen nach Skalen sicherstellt, daß die beiden Führungen, längs denen das Schwenklager verschoben werden muß, exakt parallel zueinander liegen. Die Verriegelungsvorrichtung kann verschieden ausgebildet sein. Eine besonders zweckmäßige Konstruktion hierfür ist im Anspruch 4 angegeben. Das Schwenklager wird vorzugsweise mittels einer im Gehäuse angeordneten Spindel verschoben (Anspruch 5). Eine solche Spindel kann sowohl von Hand angetrieben werden, als auch mittels eines Elektromotors. Die jeweilige Lage des Schwenklagers kann beispielsweise mittels eines Zählwerkes angezeigt werden, das die Umdrehungen der Verstellspindel anzeigt.
- Damit sich die wirksame Länge des Schwenkarmes nicht ändern kann, wird eine Verriegelung zwischen dem Schwenklager und dem Schwenkarm hergestellt. Eine besonders zweckmäßige Ausführungsform, die durch Druckluft betätigbar ist, ist im Anspruch 6 angegeben. Mit einer solchen Betätigung ist eine Fernbedienung bequem möglich. Es ist aber auch denkbar, die Verriegelung unmittelbar von Hand vorzunehmen. Der Schwenkantrieb für den ersten Halter kann von Hand erfolgen durch entsprechendes Schieben am Kreuzsupport. Dies ist ohne weiteres praktikabel, da der mit der Maschine herzustellende Vorschliff der Linse im allgemeinen in einem einzigen Durchgang ausgeführt wird. Vorzuziehen ist jedoch ein motorischer Antrieb gemäß den Ansprüchen 7 und 8.
- Gemäß einer weiteren Ausgestaltung der Erfindung (Anspruch 9) hat der zweite Halter einen auf dem Maschinengestell aufliegenden Lagerkranz, der den Kreuzsupport umfaßt. Dadurch ist der zweite Halter sehr stabil auf dem Maschinengestell abgestützt. Bei Verdrehungen des Lagerkranzes zum Zwecke der Einstellung der Querkurve verändern sich die Gewichtsbelastungen nicht, wodurch auch keine unterschiedlichen Deformationen bei verschiedenen Einstellagen auftreten. Es ist zweckmäßig, am Lagerkranz eine Einrichtung vorzusehen, mit der unterhalb des Lagerkranzes ein Luftkissen erzeugt werden kann (Anspruch 10). Damit wird eine Verdrehung des Lagerkranzes bei Einstellbarbeiten sehr wesentlich erleichtert. Nach Abbau des Luftkissens liegt der Lagerkanz infolge seines hohen Gewichtes fest auf dem Maschinengestell auf, so daß auf eine weitere Verriegelung auch verzichtet werden kann.
- In der Zeichnung ist in den Fig. 1 und 2 das Prinzip der Herstellung von konkaven und konvexen torischen Linsenflächen und in den Fig. 3 bis 6 ein Ausführungsbeispiel einer Linsenschleifmaschine dargestellt. Im einzelnen zeigen :
- Fig. 1 das Herstellungsprinzip für eine konkave torische Linsenfläche,
- Fig. 2 das Herstellungsprinzip für eine konvexe torische Linsenfläche,
- Fig. 3 eine Draufsicht auf eine Linsenschleifmaschine zur Herstellung torischer Linsenflächen,
- Fig. 4 einen vertikalen Schnitt nach den Linien IV-IV in den Fig. 3 und 5, wobei in Fig. 5 zur Vereinfachung der Zeichnung für den zweiten Halter der Schwenkwinkel Null gezeigt ist, während in Fig. 3 der zweite Haiter einen vom Schwenkwinkel Null verschiedenen Winkel einnimmt,
- Fig. 5 einen vertikalen Schnitt nach Linie V-V in Fig. 4 und
- Fig. 6 einen horizontalen Schnitt nach Linie VI-VI in Fig. 4.
- In Fig. 1 ist ein Topfwerkzeug T1 im Schnitt dargestellt. Das Topfwerkzeug hat eine kreisförmige Schneidkante 1 und ist um eine Achse 2 mit hoher Drehzahl antreibbar. Mit dem Topfwerkzeug T1 soll eine Linse L1 bearbeitet werden, d. h. an ihr soll eine konkav-torische Fläche 3 hergestellt werden. Die Linse L1 sitzt in einem Linsenhalter, der um einen feststehenden Punkt 4 auf einer Kreisbahn schwenkbar ist, so daß die Linsenfläche 3 die Schneidkante 1 vollständig passiert. Die eine Endstellung der Linse L1 ist mit ausgezogenen Linien und die andere Endstellung mit gestrichelten Linien dargestellt. Die Linse L1 ist im diametralen Schnitt gezeigt, so daß dort als Schnittlinie durch die konkav-torische Fläche die Basiskurve erscheint, deren Radius in Fig. 1 mit re bezeichnet ist. Der Radius rB ist gleich dem Abstand zwischen den Punkten 4 und 5.
- Die Querkurve wird durch die Schrägstellung der Achse 2 relativ zur Y-Achse bestimmt. Je größer der Schrägstellungswinkel a wird, desto kleiner wird der Radius der Querkurve. Wenn der Winkel a 90° beträgt, ist der Radius der Querkurve gleich dem Radius der Schneidkante 1. Eine Querkurve mit noch kleinerem Radius kann bei einer gegebenen Topfscheibe T1 nicht hergestellt werden. Je kleiner der Winkel a wird, desto größer wird der Radius der Querkurve. Allerdings ist es praktisch nicht möglich, mit einer Topfscheibe einen exakten unendlichen Radius einzustellen, also als Linsenfläche 3 eine reine Zylinderfläche herzustellen.
- Aus der Betrachtung von Fig. 1 ist ersichtlich, daß der Abstand zwischen den Punkten 4 und 5 geändert werden muß, wenn der Radius rB der Basiskurve geändert werden soll. Wenn also die Topfscheibe T1 nur schwenkbar, nicht aber wesentlich verschiebbar ist, muß zu diesem Zweck der Punkt 4 verschoben werden.
- Bei der Herstellung von konvexen Flächen wird (siehe Fig. 2) ein Topfwerkzeug T2 verwendet, das eine Schneidkante 6 aufweist, die in diesem Fall am inneren Rand der Stirnfläche des Werkzeuges liegt. Die Linse L2 ist so gehalten, daß sie um einen feststehenden Punkt 4' schwenkbar ist. Der Radius r'e ist gleich dem Abstand der Punkte 4' und 5'. Auch in diesem Fall wird der Radius der Querkurve durch den Schrägstellungswinkel a' der Achse 2' des Topfwerkzeuges T2 relativ zur Y-Achse bestimmt.
- Die nachfolgend beschriebene Maschine arbeitet nach dem anhand der Fig. 1 und 2 erläuterten Prinzip. Zeichnerisch dargestellt ist im Zusammenhang mit der Maschinendarstellung die Herstellung einer konkaven Linsenfläche.
- Die Maschine hat ein Maschinengestell 7 mit einem Unterteil 7a und einem Oberteil 7b. Das Maschinengestell 7 trägt einen insgesamt mit 8 bezeichneten Kreuzsupport, auf dem ein erster Halter 9 angeordnet ist. Ein zweiter Halter 10 ist über einen Lagerkranz 11 auf dem Maschinengestell-Oberteil 7b abgestützt. Innerhalb des gehäuseartig ausgebildeten Maschinengestelles 7 befindet sich ein insgesamt mit 12 bezeichnetes Schwenkarmlager, um das ein Schwenkarm 13 drehbar ist. Die Beschaffenheit und das Zusammenwirken dieser Bestandteile werden nachfolgend im einzelnen beschrieben.
- Der Kreuzsupport 8 hat einen ersten Schlitten 14, der über eine Rollenführung am Maschinengestell-Oberteil 7b geradlinig geführt ist. Im ersten Schlitten 14 ist ein zweiter Schlitten 16 mittels einer Rollenführung 17 geradlinig geführt (siehe Fig. 5). Die Führungsbahnen 15 und 17 sind genau rechtwinklig zueinander. Die Bewegungsrichtung des ersten Schlittens 14 ist mit X und die Bewegungsrichtung des zweiten Schlittens 16 mit Y bezeichnet. Der erste Schlitten 14 ist motorisch antreibbar. Zu diesem Zweck ist ein Elektromotor 18 vorgesehen, der als Getriebemotor ausgebildet ist und an seiner Abtriebswelle ein Kettenrad 19 trägt, über das eine Kette 20 gelegt ist. Die Kette 20 ist über Umlenkräder 21, 22 geführt und mit ihren Enden an Befestigungspunkten 23 und 24 mit dem ersten Schlitten 14 verbunden.
- Im zweiten Schlitten 16 ist der erste Halter 9 drehbar gelagert mittels eines an ihm befindlichen Zapfens 25, der in eine am zweiten Schlitten 16 befindliche Lagerhülse 26 eingreift. Vom Zapfen 25 ragt ein Arm 27 ab, der eine mittels eines Handrades 25 verschiebbare Stange 29 trägt, an der sich ein Linsenhalter 30 befindet. Der Linsenhalter 30 ist zu Einstellzwecken längs der Achse 31 verschiebbar. Am unteren Ende des Zapfens 25 ist der Schwenkarm 13 befestigt. Dieser ist gegenüber dem Zapfen 25 undrehbar, was in der Zeichnung durch den Vierkant 25a dargestellt ist. Der Schwenkarm 13 erstreckt sich symmetrisch zu seiner Befestigungsstelle. Die beiden Abschnitte sind mit 13a und 13b bezeichnet.
- Das Schwenkarmlager 12 besteht aus einem Schwenkarmhalter 32 und einem Schwenkarm- Lagerbock 33. Wie man aus dem Querschnitt nach Fig. 5 ersehen kann, hat der Schwenkarm 13 einen schwalbenschwanzförmigen Querschnitt, der in eine Nut 34 des Schwenkarmhalters 32 eingreift, die ebenfalls einen schwalbenschwanzförmigen Querschnitt hat. Am Schwenkarmhalter 32 befindet sich ein Lagerzapfen 35, der über ein Wälzlager 36 im Schwenkarmlagerbock 33 drehbar gelagert ist. Der Lagerbock 33 hat (siehe Fig. 5) eine Führungsnut 37 mit schwalbenschwanzförmigen Querschnitt. In diese Nut greift eine. Führungsleiste 38 ein, die ebenfalls einen schwalbenschwanzförmigen Querschnitt hat. Die Führungsnut 38 befindet sich am Maschinengestell Unterteil 7a.
- Der Schwenkarmhalter 32 kann gegenüber dem Schwenkarm 13 und der Lagerbock 33 gegenüber der Führungsleiste 38 verklemmt werden. Zu diesem Zweck sind Anpreßplatten 39 und 40 vorgesehen. Die Anpreßplatte 39 befindet sich in einem Raum 41 innerhalb des Schwenkarmhalters und die Anpreßplatte 40 inerhalb eines Raumes 42 im Lagerbock 33. Die beiden Räume kommunizieren über eine Bohrung 43, die sich im Schwenkarmhalter 32 befindet. Den beiden Räumen 41 und 42 kann über eine Bohrung 44 Druckluft zugeführt werden. Die Möglichkeit der Druckluftzufuhr und der Druckluftabfuhr ist durch einen Doppelpfeil 45 symbolisch dargestellt. Wenn die Räume 41, 42 durch Druckluft unter Druck gesetzt werden, wird die Anpreßplatte 39 an den Schwenkarm 13 und die Anpreßplatte 40 an die Führungsleiste 38 angepreßt, wonach eine Verschiebung des Lagerbockes und des Schwenkarmhalters nicht mehr möglich ist.
- Der Lagerbock 33 wird von einem Schiebeteil 46 umfaßt, wozu sich am Schiebeteil 46 Nasen 47, 48 befinden. Der Schiebeteil 46 enthält ein Innengewinde 49, in das eine Verstellspindel 50 eingreift. Die Verstellspindel 50 ist drehbar, jedoch axial unverschiebbar im Maschinengestell-Unterteil 7a gelagert. Die Verstellspindel ist mittels eines Elektromotors 51 antreibbar, der mit der Spindel über ein Untersetzungsgetriebe 52 gekuppelt ist.
- Der Kreuzsupport 8 ist gegenüber dem Maschinengestell 7 mittels einer Verriegelungseinrichtung 53 verriegelbar. Die Verriegelungseinrichtung hat einen Verriegelungsbolzen 54, dessen vorderes Ende 53a konisch ausgebildet ist und der in ein konisches Loch 55 am zweiten Schlitten 16 eingreifen kann. Zum Vorschieben des Verriegelungsbolzens in die Verriegelungsstellung dient ein Druckmittelzylinder 56, dem über eine Bohrung 57 Druckmittel zugeführt werden kann. Die Möglichkeit der Druckmittelzufuhr und der Druckmittelabfuhr ist durch einen Doppelpfeil 58 symbolisiert. Eine Feder 59 kann den Verriegelungsbolzen 53 in die Lösestellung zurückdrücken.
- Am Maschinengestell-Oberteil 7b befindet sich ein Führungskragen 60, an dem der Lagerkranz 11 zentriert ist. Der Lagerkranz 11 hat eine Unterfläche 11a, die sich auf einer Tragfläche 61 am Maschinenggestell-Oberteil 7b abstützt. Zwischen der Unterfläche 11 und der Tragfläche 61 befinden sich Räume 62, in die Druckluft einleitbar ist, was durch Bohrungen 62', die in diese Räume münden, angedeutet ist.
- Vom Lagerkranz 11 erhebt sich ein Bock 63, an dem sich eine Führungsleiste 64 von schwalbenschwanzförmigem Querschnitt befindet. An der Führungsleiste 64 ist ein Schlitten 65 geführt, der an die Führungsleiste 64 angepaßte Führungsflächen 66a und 66b aufweist. Das Gewicht des Schlittens ist auf Stützflächen 67a, 67b des Bockes 63 abgestützt.
- Im Schlitten 65 ist eine Schleifspindel 68 gehalten, in der eine Spindelwelle 69 gelagert ist. Am hinteren Ende der Spindelwelle 69 befindet sich eine Riemenscheibe 70, die mittels eines Treibriemens 71 von einer Riemenscheibe 72 antreibbar ist, die auf der Welle 73 eines Elektromotors 74 sitzt. Am vorderen Ende der Spindelwelle 69 sitzt ein Topfwerkzeug Tj.
- Am Maschinengestell-Oberteil 7b befindet sich eine Skala 75, die mit einer Marke 76 am Lagerkranz 11 zusammenwirkt. Die Skala 75 ist in Winkelgrade eingeteilt. Die Spindelwelle 50 ist mit einem Zählwerk 77 gekuppelt, das die Anzahl der Umdrehungen der Verstellspindel 70 auch in kleinen Bruchteilen von Umdrehungen angibt.
- Die Maschine arbeitet wie folgt. Vor Aufnahme der Arbeit wird die Maschine entsprechend der herzustellenden Linse L, eingestellt. Vor der Einstellung des Punktes 4 (siehe Fig. 1) wird der Verriegelungsbolzen 53 in die Bohrung 55 eingerastet durch Druckbeaufschlagung des Druckmittelzylinders 56. Das Verriegelungsloch 55 ist relativ zum Verriegelungsbolzen 53 so angeordnet, daß bei eingerastetem Verriegelungsbolzen der Schwenkarm 13 genau parallel zur Führungsleiste 38 ist. Für die Einstellung sind die Räume 41, 42 von Druckluft entlastet, so daß der Schwenkarmhalter 32 auf dem Schwenkarn 13 und der Schwenkarm-Lagerbock auf der Führungsleiste 38 verschiebbar ist. Die Verschiebung erfolgt durch Drehen der Spindel 50 mittels des Elektromotors 51. Die Entfernung der Achse 78 und 79 wird am Zählwerk 7 abgelesen. Das Zählwerk kann so geeicht sein, daß es diese Entfernung direkt in Millimeter angibt. Wenn die Entfernung gleich dem gewünschten Radius rB (siehe Fig. 1) ist, wird der Antrieb der Spindel gestoppt und die Räume 41,42 werden mit Druckluft beaufschlagt. Dadurch wird der Schwenkarmhalter 32 am Schwenkarm und der Lagerbock 33 an der Führungsleiste 38 verklemnt. Die Lage des Punktes 4 (siehe Fig. 1) ist damit fixiert.
- Nun wird der Lagerkranz 11 entsprechend der gewünschten Querkurve der Linsenfläche 3 verschwenkt, wobei die Marke 76 auf den entsprechenden Teilstrich der Skala 75 ausgerichtet wird. Vor der Drehung des Drehkranzes 11 werden die Räume 62 unter Druck gesetzt, wobei sich zwischen den Flächen 11a und 61 ein Lufttilm ausbildet, der ein Drehen des Lagerkranzes 11 mit geringen Kräften ermöglicht. Wenn die gewünschte Einstellung gefunden ist, wird die Druckluft aus den Räumen 62 abgelassen, so daß der Lagerkranz 11 mit hoher Reibungskraft auf der Stützfläche 61 aufliegt.
- Durch Drehen des Handrades 28 wird die Stange 29 entsprechend der Linsendicke eingestellt. Der Schlitten 65 wird in die Lage gebracht, in der die Schneidkante 1 des Topfwerkzeuges T, in der Achse 78 liegt (siehe Fig. 3). Auch die Schleifspindel 68 kann längs ihrer Achse verschoben werden, um auch nach Abnutzung der Schneidkante diese in die richtige Lage zu bringen.
- Vor der Arbeit wird der Verriegelungsbolzen 53 durch Druckentlastung im Druckmittelzylinder 56 aus der Arretierungsbohrung 55 herausgezogen. Die Schleifspindel 68 wird in Gang gesetzt und der Antrieb des Schlittens 14 durch Einschalten des Elektromotors 18 in Gang gesetzt.
- Der Elektromotor zieht nun am Schlitten 14, wobei dieser eine geradlinige Bewegung in der Richtung X ausführt. Gleichzeitig bewegt sich der zweite Schlitten 16 relativ zum ersten Schlitten 14 rechtwinklig zu diesem. Dies wird durch den Schwenkarm 13 bewirkt, der den Zapfen 25 auf einer Kreisbahn führt. Der zweite Schlitten bewegt sich in der Richtung Y. Die Kupplung der beiden Schlitten 14 und 16 an den Schwenkarm 13 bewirkt eine Zusammensetzung der Schlittenbewegungen in den Richtungen X und Y zu einer Kreisbahn.
- Aus der Betrachtung der Zeichnung ist klar, daß sich das Gewicht des ersten Halters 9 über den Kreuzsupport auf dem Maschinengestell 7b abstützt, ohne daß der Schwenkarm 13 von Gewichtskräften belastet wird. Der Schwenkarm 7 hat lediglich die Aufgabe, den ersten Halter 9 auf einer Kreisbahn zu führen. Während der Bewegung des Halters 9 auf der Kreisbahn schneidet die Schneidkante 1 des Topfwerkzeuges T, in die Linse L1 eine torische Fläche. Der Radius der Querkurve hängt ab von dem Schrägstellungswinkel a des Werkzeuges und vom Radius der Schneidkante 1. Der Radius rB hängt ab vom Abstand der Achsen 79 und 78. Die Achse 79 entspricht dem Punkt 4 in Fig. 1 und die Achse 78 dem in Fig. 1 mit 80 bezeichneten Punkt.
- Wenn eine konvexe torische Fläche entsprechend Fig. 2 hergestellt werden soll, wird der Lagerbock 33 samt dem Schwenkarmhalter 32 in eine Lage links von der Achse 78 (in Fig. 4 gesehen) verstellt. Bei diesem Bearbeitungsfall ist also der Abschnitt 13a des Schwenkarmes in Benutzung.
Claims (10)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP84104714A EP0159383B1 (de) | 1984-04-26 | 1984-04-26 | Maschine zum Schleifen von torischen Oberflächen an optischen Linsen |
| DE8484104714T DE3467317D1 (en) | 1984-04-26 | 1984-04-26 | Machine for grinding toric surfaces of optical lenses |
| US06/726,527 US4653233A (en) | 1984-04-26 | 1985-04-24 | Machine for grinding of toric surfaces on optic lenses |
| ES85542581A ES8605174A1 (es) | 1984-04-26 | 1985-04-25 | Maquina para el rectificado de superficies toricas en lentesopticas |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP84104714A EP0159383B1 (de) | 1984-04-26 | 1984-04-26 | Maschine zum Schleifen von torischen Oberflächen an optischen Linsen |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0159383A1 EP0159383A1 (de) | 1985-10-30 |
| EP0159383B1 true EP0159383B1 (de) | 1987-11-11 |
Family
ID=8191900
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP84104714A Expired EP0159383B1 (de) | 1984-04-26 | 1984-04-26 | Maschine zum Schleifen von torischen Oberflächen an optischen Linsen |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US4653233A (de) |
| EP (1) | EP0159383B1 (de) |
| DE (1) | DE3467317D1 (de) |
| ES (1) | ES8605174A1 (de) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4769953A (en) * | 1986-11-20 | 1988-09-13 | Rxtec Incorporated | Lens generating system |
| US4768308A (en) * | 1986-12-17 | 1988-09-06 | University Of Rochester | Universal lens polishing tool, polishing apparatus and method of polishing |
| GB8709127D0 (en) * | 1987-04-15 | 1987-05-20 | Autoflow Eng Ltd | Sensing lens blank |
| US5007209A (en) * | 1987-06-26 | 1991-04-16 | K.K. Sankyo Seiki Seisakusho | Optical fiber connector polishing apparatus and method |
| US4947715A (en) * | 1988-11-22 | 1990-08-14 | Citycrown, Inc. | Method and apparatus for cutting an aspheric surface on a workpiece |
| US4884482A (en) * | 1988-11-22 | 1989-12-05 | Citycrown, Inc. | Method and apparatus for cutting an aspheric surface on a workpiece |
| EP0538391A1 (de) * | 1990-07-12 | 1993-04-28 | Loh Optical Machinery, Inc. | Computergesteuerte einrichtung zum schleifen von optischen linsen |
| US5231587A (en) * | 1990-07-12 | 1993-07-27 | Loh Optical Machinery, Inc. | Computer controlled lens surfacer |
| US5678967A (en) * | 1995-11-21 | 1997-10-21 | Micro Optics Design Corporation | Apparatus for cutting a workpiece and including a kinematic tool coupling |
| US5957637A (en) * | 1997-11-13 | 1999-09-28 | Micro Optics Design Corp. | Apparatus and method for generating ultimate surfaces on ophthalmic lenses |
| US6080044A (en) * | 1998-03-26 | 2000-06-27 | Gerber Coburn Optical, Inc. | Fining/polishing machine |
| ATE407770T1 (de) * | 2006-05-12 | 2008-09-15 | Satisloh Gmbh | Verfahren und vorrichtung für das erzeugen einer optischen oberfläche auf einem werkstück, z.b. ophthalmischen linsen |
| KR20140131090A (ko) * | 2013-05-03 | 2014-11-12 | 한국전자통신연구원 | 과수용 반사판 관리 장치 및 이를 이용한 방법 |
| CN115781424B (zh) * | 2022-11-17 | 2023-08-04 | 苏州三环科技有限公司 | 一种陶瓷劈刀外半径研磨方法、系统、设备及介质 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE1252555B (de) * | 1968-11-28 | Coburn Manufacturing Company, Inc., Muskogee, OkIa. (V. St. A.) | Einrichtung zum Erhalt gleicher Dicke bei Linsen an einer Radienfräsmaschine | |
| US2556604A (en) * | 1949-02-15 | 1951-06-12 | Alfred G Goldberg | Compound lens generator |
| US3399496A (en) * | 1965-05-12 | 1968-09-03 | Textron Inc | Machine for generating toric surfaces |
| US3458956A (en) * | 1965-10-14 | 1969-08-05 | Coburn Mfg Co Inc | Manual-automatic lens generator |
| US4068413A (en) * | 1975-10-02 | 1978-01-17 | Suddarth Jack M | Adjustable lens grinding apparatus |
-
1984
- 1984-04-26 DE DE8484104714T patent/DE3467317D1/de not_active Expired
- 1984-04-26 EP EP84104714A patent/EP0159383B1/de not_active Expired
-
1985
- 1985-04-24 US US06/726,527 patent/US4653233A/en not_active Expired - Fee Related
- 1985-04-25 ES ES85542581A patent/ES8605174A1/es not_active Expired
Also Published As
| Publication number | Publication date |
|---|---|
| EP0159383A1 (de) | 1985-10-30 |
| ES8605174A1 (es) | 1986-03-16 |
| DE3467317D1 (en) | 1987-12-17 |
| US4653233A (en) | 1987-03-31 |
| ES542581A0 (es) | 1986-03-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0483064B1 (de) | Bearbeitungszentrum zum Schleifen von Werkstücken mit komplex geformten Oberflächen | |
| EP0159383B1 (de) | Maschine zum Schleifen von torischen Oberflächen an optischen Linsen | |
| DE3438238C2 (de) | ||
| DE2500748B2 (de) | Spindelstock | |
| DE2937976A1 (de) | Maschine zum erzeugen von konvexen und/oder konkaven sphaerischen flaechen, insbesondere solcher von optischen linsen | |
| DE1577366B1 (de) | Rundschleifmaschine zur gleichzeitigen Bearbeitung von zwei rotierenden Werkstuecken mit einem rotierenden Werkzeug | |
| DE2937977C2 (de) | Maschine zum Schleifen oder Fräsen von konvexen und/oder konkaven sphärischen Flächen | |
| DE2652025C2 (de) | Schleif- und Poliermaschine für Werkzeuge | |
| DE2044429C3 (de) | Zusatzeinrichtung für das Bearbeiten von Kugel-Innenflächen auf einer Vertikaldrehmaschine | |
| DE3521710C2 (de) | Vorrichtung an einer Werkzeugmaschine, insbesondere an einer Schleifmaschine, zum Messen des Durchmessers exzentrisch umlaufender Werkstücke | |
| DE3734734C2 (de) | ||
| DE29601808U1 (de) | Vorrichtung zum Bearbeiten von Stangenmaterial, Profilen u.dgl. | |
| DE2807268C3 (de) | Maschine zum Zentrierschleifen von optischen Linsen | |
| DE3239720T1 (de) | Innenschleifmaschine | |
| DE3936699C2 (de) | Aufsatzgerät für eine Werkzeug-Schleifmaschine | |
| DE3110624C2 (de) | Vorrichtung zum Herstellen einer Kontaktlinse | |
| DE2328439C3 (de) | Schwenkbarer Werkstück-Aufspanntisch für Werkzeugmaschinen, insbesondere für Universal-Fräsmaschinen | |
| DE2603229C2 (de) | Kopiervorrichtung zur spanabhebenden Bearbeitung mit einem Werkstückträger und einem Werkzeugträger | |
| DE186709C (de) | ||
| DE19836348C5 (de) | Werkzeugaufnahme für eine CNC-gesteuerte Hartdrehmaschine | |
| DE670502C (de) | Werkstueckhalter zum Anschleifen einer zylindrischen Flaeche von einstellbarem Radius und beliebiger Neigung nach allen Richtungen an einem Werkzeugstahl | |
| CH674325A5 (en) | Machine for producing workpieces with concave or convex surfaces - has table which can be swung about vertical axis and carrying slide which carries workpiece | |
| DE948466C (de) | Drehbank mit Zentriervorrichtung | |
| DE386609C (de) | ||
| DE1577366C (de) | Rundschleifmaschine zur gleichzeiti gen Bearbeitung von zwei rotierenden Werk stucken mit einem rotierenden Werkzeug |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Designated state(s): CH DE FR GB IT LI |
|
| 17P | Request for examination filed |
Effective date: 19851109 |
|
| 17Q | First examination report despatched |
Effective date: 19860930 |
|
| ITF | It: translation for a ep patent filed | ||
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): CH DE FR GB IT LI |
|
| REF | Corresponds to: |
Ref document number: 3467317 Country of ref document: DE Date of ref document: 19871217 |
|
| ET | Fr: translation filed | ||
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) | ||
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| ITTA | It: last paid annual fee | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 19950411 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 19950418 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 19950427 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 19950530 Year of fee payment: 12 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Effective date: 19960426 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Effective date: 19960430 Ref country code: CH Effective date: 19960430 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 19960426 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Effective date: 19961227 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Effective date: 19970101 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST |