EP0045454A2 - Manipulator zum Positionieren einer Rohrsonde - Google Patents
Manipulator zum Positionieren einer Rohrsonde Download PDFInfo
- Publication number
- EP0045454A2 EP0045454A2 EP81105840A EP81105840A EP0045454A2 EP 0045454 A2 EP0045454 A2 EP 0045454A2 EP 81105840 A EP81105840 A EP 81105840A EP 81105840 A EP81105840 A EP 81105840A EP 0045454 A2 EP0045454 A2 EP 0045454A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- boom
- tube
- pipe
- support
- manipulator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F22—STEAM GENERATION
- F22B—METHODS OF STEAM GENERATION; STEAM BOILERS
- F22B37/00—Component parts or details of steam boilers
- F22B37/002—Component parts or details of steam boilers specially adapted for nuclear steam generators, e.g. maintenance, repairing or inspecting equipment not otherwise provided for
- F22B37/003—Maintenance, repairing or inspecting equipment positioned in or via the headers
- F22B37/005—Positioning apparatus specially adapted therefor
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S165/00—Heat exchange
- Y10S165/001—Heat exchange with alarm, indicator, recorder, test, or inspection means
- Y10S165/003—Remote control inspection means
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/49—Method of mechanical manufacture
- Y10T29/49718—Repairing
Definitions
- the invention relates to a manipulator for the remote-controlled positioning of inspection and, if necessary, repair pipe probes according to the preamble of claim 1.
- Such a manipulator is known from DE-PS 22 63 143.
- the support body - referred to there as the device carrier - covers the pipe openings located in the area of its base area. Without moving the support body, there is no access to the covered pipe orifices for the pipe probe.
- Another known manipulator of the type mentioned in DE-OS 25 52 341 works on the so-called finger walker principle.
- a finger walker basically consists of two mutually movable, sliding parts, each of which has its own expanding mandrels, which must be sufficient to lock the entire manipulator on the pipe field, even in an overhead position, so that the other part is loosened Spreader mandrels can move or stride and - after his spreader mandrels are locked again after executing the step - the other manipulator part can take a step, and so on.
- the two manipulator parts consist of two arms arranged at right angles to one another, which are relative to one another in the X or Y direction of an imaginary coordinate system and thus also are displaceable to the pipe field and each of which is provided with expanding mandrels at its ends.
- a finger walker is a relatively complicated structure, which must not only have the location control for the boom carrying the mouthpiece, but also the locomotion control for the striding mechanism.
- the invention has for its object to provide a manipulator of the type mentioned, with which a 100% inspection of the tube field of a heat exchanger, in particular within the primary chamber of a steam generator for nuclear reactors, is possible without the manipulator being implemented after its one-time attachment and without it having to have the mechanics and controls of a finger walker.
- the object is achieved in a manipulator of the type mentioned at the outset by the features specified in the characterizing part of claim 1.
- Advantageous further developments are described in the subclaims.
- the advantages that can be achieved with the invention are to be seen primarily in the fact that the manipulator once fixed and centered on the pipe field with the expanding mandrels of its supporting body no longer needs to be implemented and does not need to be advanced for a 100% pipe test; the straight movement of the support and the stepless swiveling movement of the boom are sufficient to paint over all pipe orifices.
- the expanding mandrels are therefore not retracted to advance, but only in order to enable the boom to be pivoted or adjusted longitudinally in this area and / or in order to make the pipe mouth occupied by the expanding mandrel accessible; Once the manipulator has been assembled and centered, it is retained.
- the steam generator DE shown in FIG. 1 for pressurized water nuclear reactors has a boiler wall 1 with a welded-in tube sheet 2 and a dome wall part 1a for the two primary chamber halves Ia, Ib.
- the heat exchanger tubes 3 are welded into the tube sheet, of which only three are more clearly drawn out and the others are only indicated by dashed lines, with tube openings 3a pointing into the primary chamber 1a, 1b.
- the primary medium, treated normal water, which is heated in the core of the reactor pressure vessel, not shown passes via a primary circuit pipeline, also not shown, via an invisible inlet connection, for example, into the primary chamber half 1a, which is separated from the primary chamber half 1b by a curved partition wall 4.
- the manipulator M is used to manipulate all of these probes, which consequently serves for the remote-controlled positioning of the tube probes RS, which are used for inspection and, if necessary, repair, on the tube mouths 3a of the tubes 3 of steam generators DE for the nuclear reactors, which tubes 3 are contained in the tube plate 2.
- the probe RS is connected to a flexible supply hose 5.1, which at the same time serves as a push hose for the pipe probe RS at its end and which is mounted so that it can move back and forth within a flexible guide hose 5.2.
- Supply and guide hose 5.1, 5.2 are drawn out enlarged for a section in FIG. 1 and designated 5 as a whole.
- the guide hose 5.2 ends in a mouthpiece 6, which is supported by the free end of a boom 7 pivotably mounted in a tube-transverse plane.
- the manipulator M has a supporting body 9 with a guideway 10 in the form of a spindle, which can be fastened to the pipe orifices 3a by means of spaced-apart expanding mandrels 8, a bearing mounted on the supporting body 9 and on its guideway 10 rectilinear in the direction of x rectilinearly movable support 11 as well as the already mentioned arm 7 pivotably supported on the support 11 in a tube-transverse plane.
- the supporting body 9 consists of an elongated frame construction with end plates 9.1, which with the pivot bearings for the two ends of the one having an external thread Spindle 10 are provided.
- a drive motor 12 for the spindle 10 is also flanged to one of the circuit boards 9.1.
- the support 11 is a rigid cantilever beam, which is mounted with its traveling nut body 11.1 'on the spindle 10 so that when the spindle 10 is rotated, the support can be moved back and forth in the x direction depending on the direction of rotation, but cannot rotate with it .
- the support 11 grips with a U-shaped holding part 11.2, indicated schematically in FIG. 1, with upper and lower holding arms 11.21, 11.22, corresponding upper and lower guideways 9.2 of the support body 9. Through the angled end 11.23 of the upper guiding arm 11.21, which is not a engages shown guide bar of the support body 9, it is ensured that the support 11 can not fold down.
- All the guide surfaces on the support 11 and their counter surfaces on the support body 9 for moving the support in the x direction can be provided with roller bodies (not shown in more detail) in order to achieve a rolling instead of a sliding friction.
- the housing of a rotary actuator 14 is flanged, which is to be an infinitely adjustable rotary motor, with the axis of rotation 13 of which serves as the joint head bearing body 7.1 of the boom 7 is connected.
- the length of the support body 9, the support 11 and the boom 7 is now each dimensioned such that by moving the support 11 in the x direction and by pivoting the boom 7 by the angle ⁇ in an angular range of at least 360 ° - 2 ⁇ , as explained in detail later, with the mouthpiece 6 of the boom 7 any pipe mouth 3a of the pipe field 30 can be reached (FIG. 2).
- the tube field 30 is indicated in detail in FIG. 2 by a grid of lines crossing at right angles and by the dash-dotted outline of a circular section.
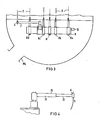
- FIG. 2 and 3 show that at least three, in the present case there are four expandable mandrels 8 that can be extended and retracted and distributed over the length of the supporting body 9.
- Fig. 2 also illustrates using the boom positions 7, 7 ', 7 "and 7''' that the boom 7 is pivotable in an angular range of 360 ° - 2 ⁇ , and that is infinitely pivotable, so that the mouthpiece 6 is aligned with any pipe mouth 3a and thus the pipe probe RS without problems
- the tube probe RS is also expediently tapered at its retracting end in order to facilitate insertion with slight lateral deviations
- the expansion mandrels are briefly retracted or retracted in the direction z1 (FIG. 1), but the remaining expansion mandrels 8a, 8b and 8d (in the case of the lifted expansion mandrel 8c) remain in engagement receive the fastening and centering position of the manipulator M or of the support body 9.
- the mouthpiece 6 of the boom 7 reaches all pipe orifices 3a of the pipe field 30 by appropriate adjustment operations, irrespective of whether the pipe field is based on a cartesian or a polar coordinate system.
- its rotary motor 14 is assigned an angle encoder, and the support 11 can, for example, engage with the pinion of a length encoder with a toothed rack attached to the support body 9 parallel to the spindle 10, so that from the corresponding pulses of length -and angle encoder can be calculated using a computer on a control panel, the exact tube position in Cartesian coordinates that the mouthpiece-6 is currently occupying.
- the manipulator M is positioned symmetrically to the axis of symmetry y and the length of the arm 7 is also matched to this position.
- the electrical supply lines for the adjusting motors 12 and 14 as well as the length and angle encoders, and also the pneumatic supply lines for the expanding mandrel cylinders 8.3 are omitted for the sake of simplicity.
- an expanding mandrel 8 ' is indicated by dashed lines, which could be used in a second embodiment instead of the two expanding mandrels 8c and 8b, so that the manipulator M with the expanding mandrels 8a, 8' and 8d would be equipped.
- Three expanding mandrels represent the minimum per manipulator, since two of them must always be in engagement in the manipulator M test position.
- the first embodiment with four expanding mandrels provides increased clamping security, since if one of the at least three expanding mandrels that fail to engage at the same time fails, two are still engaged. It is also possible to provide more than four expanding mandrels.
- Fig. 4 shows in detail a boom 70 which is adjustable in length, due to a telescopic linkage with cylinder part 71 and piston part 72.
- a boom can be shortened in length by almost half, which e.g. has the advantage that - see FIG. 2 - for pivoting the boom from position 7 to position 7 'it does not need to be moved into the middle position.
- the advantage can be achieved that no such precise adjustment of the boom length and the dimensions of the support 11 and the support body 9 need be made to the inner contours of the steam generator chamber; this would make such a manipulator more universal, i.e. Can be used for different steam generator sizes with different primary chamber dimensions.
- the support body 9 has a support device 15 with at least one support leg 15.1 which can be braced laterally against the partition 4.
- This is advantageously a pneumatic piston-cylinder arrangement.
- the support leg 15.1 is e.g. articulated with a ball joint to the piston rod 15.2 in order to adapt to the curvature of the partition 4.
- the dash-dotted partial representation of the manipulator M in the left part of FIG. 1 within the primary chamber half 1a illustrates that it is possible to move the mouthpiece 6 into acute-angled niches 16, which are caused by the convex curvature of the partition wall 4, but with the flexibility of guide and supply hose 5.2, 5.1 special requirements are made.
- the primary chamber of the steam generator is not divided by a partition 4; in this case it would be advantageous to use a manipulator M which by doubling, i.e. Reflection on its expanding mandrel connection axis is to be thought and thus has a support 11 with a bracket 7 on each side of the longitudinal axis of a support body 9 doubled in this way. In this case, both swivel arms could even work at the same time, which would allow around half the test time compared to a manipulator with only one arm.
- the manipulator M is inserted through the manhole ML (the cover, not shown, of which is removed for this purpose) when the steam generator primary chamber is drained, and is brought into the test position that can best be seen in FIG. 2. All that is required is a short stay of operating personnel in protective suits in the primary chamber. After the test has been carried out, the manipulator M is dismantled and removed accordingly. It is also fundamentally possible, in order to prevent operators from entering the steam generator primary chamber, by a rail system projecting from the outside through the nozzle into the primary chamber at the manhole connector ML1 attach to which the manipulator M is raked up on the outside and can then be moved remotely into its test position, as already explained in DE-OS 28 30 306.
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- High Energy & Nuclear Physics (AREA)
- Thermal Sciences (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Monitoring And Testing Of Nuclear Reactors (AREA)
- Manipulator (AREA)
- Investigating Or Analyzing Materials By The Use Of Ultrasonic Waves (AREA)
Abstract
Description
- Die Erfindung bezieht sich auf einen Manipulator zum fernbedienbaren Positionieren von der Inspektion und gegebenenfalls Reparatur dienenden Rohrsonden gemäß Oberbegriff des Anspruchs 1.
- Ein solcher Manipulator ist durch die DE-PS 22 63 143 bekannt. Bei diesem bekannten Manipulator deckt der Tragkörper - dort als Geräteträger bezeichnet - die im Bereich seiner Grundfläche liegenden Rohrmündungen ab. Ohne ein Umsetzen des Tragkörpers ist also eine Zugänglichkeit zu den abgedeckten Rohrmündungen für die Rohrsonde nicht gegeben.
- Ein anderer bekannter Manipulator der eingangs genannten Art nach der DE-OS 25 52 341 arbeitet nach dem sogenannten Fingerwalker-Prinzip. Ein solcher Fingerwalker besteht im Prinzip aus zwei relativ zueinander beweglichen, ineinandergleitenden Teilen, von denen jeder Teil seine eigenen Spreizdorne aufweist, die zur Arretierung des gesamten Manipulators am Rohrfeld, auch in einer Uberkopf-Position, ausreichen müssen, so daß der andere Teil bei gelösten Spreizdornen sich fortbewegen bzw. schreiten kann und - nachdem nach Ausführung des Schrittes seine Spreizdorne wieder verriegelt sind - der andere Manipulatorteil einen Schritt ausführen kann, und so fort. Bei dem vorgenannten bekannten Manipulator nach der DE-OS.25 52 341 bestehen die beiden Manipulatorteile aus zwei rechtwinklig zueinander angeordneten Armen, welche in X- bzw. Y-Richtung eines gedachten Koordinatensystems relativ zueinander und damit auch zum Rohrfeld verschiebbar sind und deren jeder an seinen Enden mit Spreizdornen versehen ist. Ein solcher Fingerwalker ist ein verhältnismäßig kompliziert aufgebautes Gebilde, welches nicht nur die Ortssteuerung für den das Mundstück tragenden Ausleger, sondern auch die Fortbewegungssteuerung für das Schreitwerk aufweisen muß.
- Der Erfindung liegt die Aufgabe zugrunde, einen Manipulator der eingangs genannten Art zu schaffen, mit dem eine 100%-ige Prüfung des Rohrfeldes eines Wärmetauschers, insbesondere innerhalb der Primärkammer eines Dampferzeugers für Kernreaktoren, ermöglicht ist, ohne daß der Manipulator nach seiner einmaligen Befestigung umgesetzt werden und ohne daß er die Mechanik und Steuerung eines Fingerwalkers aufweisen müßte.
- Erfindungsgemäß wird die gestellte Aufgabe bei einem Manipulator der eingangs genannten Art durch die im Kennzei- - chen des Anspruchs 1 angegebenen Merkmale gelöst. Vorteilhafte Weiterbildungen sind in den Unteransprüchen beschrieben. Die mit der Erfindung erzielbaren Vorteile sind vor allem darin zu sehen, daß der einmal mit den Spreizdornen seines Tragkörpers am Rohrfeld befestigte und zentrierte Manipulator für eine 100%-ige Rohrprüfung nicht mehr umgesetzt zu werden und auch nicht fortzuschreiten braucht; es genügt zum Überstreichen aller Rohrmündungen die geradlinige Bewegung des Supports und die stufenlose Schwenkbewegung des Auslegers. Die Spreizdorne werden also nicht zum Fortschreiten eingefahren, sondern nur, um eine Schwenkung oder Längsverstellung des Auslegers in diesem Bereich und/oder um eine Zugänglichkeit zu der vom Spreizdorn besetzten Rohrmündung zu ermöglichen; die einmal vorgenommene Montage und Zentrierung des Manipulators bleibt erhalten.
- Im folgenden wird anhand der mehrere Ausführungsbeispiele darstellenden Zeichnung die Erfindung noch näher erläutert. Darin zeigt in vereinfachter Darstellung unter Fortlassung der für das Verständnis der Erfindung nicht erforderlichen Teile:
- Fig. 1 in einem Längsschnitt eines Dampferzeugers die Seitenansicht des in der einen Primärkammerhälfte am Rohrboden befestigten und zentrierten Manipulators;
- Fig. 2 die Draufsicht auf den Manipulator nach Fig. 1 mit Blickrichtung von unten, wobei vier Ausleger-und zwei Support-Positionen.dargestellt sind;
- Fig. 3 die Ansicht in Blickrichtung A auf den Manipulator nach Fig. 2 und
- Fig. 4 im Ausschnitt eine Variante für den Ausleger des Manipulators mit Teleskopverstellung.
- Der in Fig. 1 dargestellte Dampferzeuger DE für Druckwasser-Kernreaktoren hat eine Kesselwandung 1 mit eingeschweißtem Rohrboden 2 und Bodenkalotten-Wandteil 1a für die beiden Primärkammerhälften Ia, Ib. In den Rohrboden sind die Wärmetauscherrohre 3 eingeschweißt, von denen nur drei deutlicher herausgezeichnet und die anderen lediglich gestrichelt angedeutet sind, mit in die Primärkammer 1a, 1b weisenden Rohrmündungen 3a. Das Primärmedium, aufbereitetes normales Wasser, welches im Kern des nicht dargestellten Reaktordruckbehälters erwärmt wird, gelangt über eine gleichfalls nicht dargestellte Primärkreisrohrleitung über einen nicht ersichtlichen Einlaßstutzen z.B. in die Primärkammerhälfte 1a, welche von der Primärkammerhälfte 1b durch eine gewölbte Trennwand 4 abgetrennt ist. Es tritt über die Mündungen 3a in das Rohrbündel 3.1 ein, gibt seine Wärme an das in der Sekundärkammer II enthaltene, zu verdampfende Sekundärmedium ab und strömt über die U-RohrBögen in das zweite Rohrbündel 3.2, welches es über die Rohrmündungen 3a verläßt und so in die Primärkammerhälfte Ib und deren nicht gezeichneten Auslaßstutzen in den Primärkreislauf zwecks erneuter Aufheizung im Reaktorkern zurückgespeist werden kann. Die wärmetauschenden Rohre 3 des Dampferzeugers DE müssen einer periodischen Überprüfung auf Anrisse unterzogen werden. Das geschieht mit einer in die Rohre 3 einfahrbaren Rohrsonde RS eines Wirbelstrommeßgerätes, welche in Fig. 1 in einer Einfahrposition im Rohrmündungsbereich gezeigt ist. Außer der erwähnten Wirbelstrommeß-Sonde RS kann es sich dabei auch um Reinigungswerkzeuge zur Rohrreinigung von innen handeln oder um Reparaturwerkzeuge, durch welche ebenfalls Sprengstopfen zur Abdichtung von Rissen eingebracht werden können.
- Zur Manipulation all dieser Sonden dient der Manipulator M, welcher folglich zum fernbedienbaren Positionieren von der Inspektion und gegebenenfalls Reparatur dienenden Rohrsonden RS an den Rohrmündungen 3a der in der Rohrplatte 2 gefaßten Rohre 3 von Dampferzeugern DE für Kernreaktoren dient. Anstelle von Dampferzeugern könnte es sich auch allgemein um Wärmetauscher mit einer entsprechenden Rohrplatte 2 handeln. Die Sonde RS ist an einen flexiblen Versorgungsschlauch 5.1 angeschlossen, welcher zugleich als Schubschlauch für die Rohrsonde RS an seinem Ende dient und der innerhalb eines flexiblen Führungsschlauches 5.2 hin und her bewegbar gelagert ist. Versorgungs- und Führungsschlauch 5.1, 5.2 sind für ein Teilstück in Fig. 1 vergrößert herausgezeichnet und als Ganzes mit 5 bezeichnet. Der Führungsschlauch 5.2 endet in einem Mundstück 6, welches von dem freien Ende eines in einer rohrqueren Ebene schwenkbar gelagerten Auslegers 7 getragen ist.
- Wie es Fig. 1 in Verbindung mit Fig. 2 und 3 zeigt, weist der Manipulator M einen mittels zueinander beabstandeten Spreizdornen 8 an den Rohrmündungen 3a befestigbaren Tragkörper 9 mit Führungsbahn 10 in Form einer Spindel auf, einen am Tragkörper 9 gelagerten und an dessen Führungsbahn 10 geradlinig in Richtung x geradlinig verfahrbaren Support 11 sowie den bereits erwähnten, am Support 11 in einer rohrqueren Ebene schwenkbar gelagerten Ausleger 7. Der Tragkörper 9 besteht aus einer langgestreckten Rahmenkonstruktion mit Endplatinen 9.1, welche mit den Drehlagern für die beiden Enden der ein Außengewinde aufweisenden Spindel 10 versehen sind. An die eine der Platine 9.1 ist weiterhin ein Antriebsmotor 12 für die Spindel 10 angeflanscht. Der Support 11 ist ein biegesteifer Kragbalken, welcher mit seinem Wandermutterkörper 11.1' auf der Spindel 10 so gelagert ist, daß sich bei Drehung der Spindel 10 der Support in x-Richtung je nach der Drehrichtung hin und her verschieben läßt, sich jedoch nicht mitdrehen kann. Hierzu umgreift der Support 11 mit einem U-förmigen, schematisch in Fig. 1 angedeuteten Halteteil 11.2 mit oberem und unteren Haltearum 11.21, 11.22 entsprechende obere und untere Führungsbahnen 9.2 des Tragkörpers 9. Durch das abgewinkelte Ende 11.23 des oberen Führungsarmes 11.21, welches eine nicht dargestellte Führungsleiste des Tragkörpers 9 hintergreift, ist gewährleistet, daß der Support 11 nicht nach unten wegklappen kann. Alle die Führungsflächen am Support 11 und ihre Gegenflächen am Tragkörper 9 zur Bewegung des Supports in x-Richtung können mit nicht näher dargestellten Rollenkörpern zur Erzielung einer rollenden anstatt einer gleitenden Reibung versehen sein.
- Am freien Ende des Supports 11 ist auf einer oberen Tragfläche 9.3 desselben mit in Arbeitsposition des Mani- pulators M vertikaler Drehachse 13 das Gehäuse eines Schwenkantriebes 14 angeflanscht, bei dem es sich um einen stufenlos verstellbaren Drehmotor handelt, mit dessen Drehachse 13 der als Gelenkkopf dienende Lagerkörper 7.1 des Auslegers 7 verbunden ist. Die Längenerstreckung des Tragkörpers 9, des Supports 11 und des Auslegers 7 ist nun jeweils so bemessen, daß durch ein Verfahren des Supports 11 in x-Richtung und durch ein Verschwenken des Auslegers 7 um den Winkel ϕ in einem Winkelbereich von mindestens 360° - 2α, wie später noch im einzelnen erläutert, mit dem Mundstück 6 des Auslegers 7 jede beliebige Rohrmündung 3a des Rohrfeldes 30 erreichbar ist (Fig. 2). Das Rohrfeld 30 ist in Fig.2 ausschnittsweise durch einen Raster sich rechwinklig kreuzender Linien und durch die strichpunktierten Umrißlinien eines Kreisabschnittes angedeutet.
- Das Aus- und Einfahren der Spreizdorne 8 (siehe insbe- sondere Fig. 1) erfolgt mittels Spreizdornantrieben,. bestehend aus einer den Spreizdorn 8 an ihrem freien Ende aufweisenden Schubstange 8.2 und einem Antriebsgehäuse 8.3 für die Schubstange 8.2, welche als Pneumatikzylinder für die entsprechende. (nicht dargestellte) Pneumatikkolben aufweisenden Schubstangen 8.2 ausgeführt sein kann. Das Aus- und Einfahren der Spreizdorne 8 erfolgt bei der dargestellten Arbeitsposition des Manipulators in z-Richtung, vergleiche Pfeil. Aufbau und Funktion derartiger Spreizdorne sind an sich bekannt und z.B. in der DE-OS 25 52 341 näher beschrieben, so daß. hier auf eine nähere Erläuterung verzichtet werden kann.
- Fig. 2 und 3 zeigen, daß mindestens drei, im vorliegenden Falle sind es vier, aus- und einfahbare, über die Länge des Tragkörpers 9 verteilte Spreizdorne 8 vorgesehen sind. Fig. 2 verdeutlicht ferner anhand der Auslegerpostionen 7, 7', 7" und 7''', daß der Ausleger 7 in einem Winkelbereich von 360° - 2α schwenkbar ist, und zwar stufenlos schwenkbar, damit das Mundstück 6 auf eine beliebige Rohrmündung 3a ausgerichtet und so die Rohrsonde RS problemlos eingefahren werden kann. Die Rohrsonde RS ist darüber hinaus an ihrem Einfahrende zweckmäßig konisch zulaufend, um die Einführung bei geringfügigen Seitenabweichungen zu erleichtern. Der Vtinkel α ist durch die Beziehung cos α= m : n definiert, wobei n die Länge des Auslegers 7 und m das Lot vom Auslegerschwenkpunkt 13 auf die Rohrfeldbegrenzungssehne 301 bedeutet. Dies wird deutlicher bei Betrachtung von Fig. 2 und der Auslegerpositionen 7, 7", 7''' und 7'. Von der mit ausgezogenen Linien dargestellten Position 7 des Auslegers kann dieser durch Verschwenken in Uhrzeigerrichtung pu in die Position 7" verfahren werden. Er erreicht damit die Rohrfeld- Begrenzungssehne 301 und die auf dieser Sehne liegenden Rohrmündungen. Wird jetzt der Support 11 in Richtung x1 verfahren, so können alle in dieser Richtung liegenden Rohrmündungen vom Mundstück 6 erreicht werden bis zur äußersten Position 7''' mit Ausnahme der von den Spreizdornen 8c und 8d besetzten Rohrmündungen. Deshalb werden, wenn der Ausleger mit seinem Mundstück 6 kurz vor der durch den Spreizdorn 8c bzw. 8d abgedeckten Rohrmündung steht, die Spreizdorne kurzzeitig zurück- bzw. eingefahren in Richtung z1 (Fig. 1), wobei aber die übrigen Spreizdorne 8a, 8b und 8d (im Falle des gelifteten Spreizdorns 8c) im Eingriff bleiben. Damit bleibt die Befestigungs- und Zentrierposition des Manipulators M bzw. des Tragkörpers 9 erhalten. Entsprechendes gilt beim Anfahren der vom Spreizdorn 8d bedeckten Rohrmündung; dieser Spreizdorn 8d wird zur Prüfung des entsprechenden Wärmetauscherrohres außer Eingriff gebracht, während die übrigen 8a, 8b und 8c in Eingriff bleiben. Wenn die restlichen auf der Begrenzungssehne 301 liegenden Rohrmündungen angefahren werden sollen, so muß der Ausleger 7 in die Position 7' verschwenkt werden, wozu es erforderlich ist, ihn in eine Mittenposition zu bringen, d.h. den Support 11 so zu verfahren, daß der Schwenkpunkt 13 auf der Symmetrieachse y liegt. Dann ist es möglich, den Ausleger 7 in Gegenzeigerrichtung G in die Position 7' zu verschwenken. Bei dem dann möglichen Abfahren der Rohrmündungen auf der Begrenzungssehne 301 wird, wie bereits grundsätzlich erläutert, der Spreizdorn 8a kurzzeitig eingezogen, damit 1. ein Weiterfahren des Auslegers möglich ist und 2. auch eine Prüfung des vom Spreizdorn versperrt gewesenen Rohres. Wie man sieht, erreicht das Mundstück 6 des Auslegers 7 durch entsprechende Verstelloperationen sämtliche Rohrmündungen 3a des Rohrfeldes 30, und zwar gleichgültig, ob dem Rohrfeld ein karthesiches..oder ein Polar-Koordinatensystem zugrunde liegt. Zur Rückmeldung der jeweiligen Position des Auslegers 7 ist seinem Drehmotor 14 ein Winkelkodierer zugeordnet, und der Support 11 kann z.B. mit dem Ritzel eines Längenkodierers mit einer parallel zur Spindel 10 am Tragkörper 9 angebrachten Zahnstange in Eingriff stehen, so daß aus den entsprechenden Impulsen des Längen-und Winkel-Kodierers über einen Rechner an einem Bedienungspult die genaue Rohrposition in karthesischen Koordinaten, die das Mundstück-6 gerade einnimmt, berechnet werden kann. Der Manipulator M ist, wie ersichtlich, symmetrisch zur Symmetrieachse y positioniert und auf diese Position ist auch die Länge des Auslegers 7 abgestimmt. Die elektrischen Zuleitungen für die Verstellmotoren 12 und 14 sowie die Längen- und WinkelKodierer, ferner die pneumatischen Zuleitungen für die Spreizdorn-Zylinder 8.3 sind der Einfachheit halber weggelassen.
- In Fig. 3 ist gestrichelt ein Spreizdorn 8' angedeutet, der anstelle der beiden Spreizdorne 8c und 8b in einer zweiten Ausführungsform Verwendung finden könnte, so daß der Manipulator M mit den Spreizdornen 8a, 8' und 8d ausgerüstet wäre. Drei Spreizdorne stellen das Minimum pro Manipulator dar,da zwei von ihnen in Prüfposition des Manipulators M immer in Eingriff stehen müssen. Eine vergrößerte Klemmsicherheit ergibt indessen die erste Ausführung mit vier Spreizdornen, da dann, wenn einer der mindestens drei gleichzeitig in Eingriff befindlichen Spreizdorne versagen sollte, immer noch zwei in Eingriff sind. Es ist auch möglich, mehr als vier Spreizdorne vorzusehen.
- Fig. 4. zeigt im Ausschnitt einen Ausleger 70, der in seiner Länge verstellbar ist, und zwar bedingt durch ein Teleskopgestänge mit Zylinderteil 71 und Kolbenteil 72. Ein solcher Ausleger kann fast um die Hälfte in seiner Länge verkürzt werden, was z.B. den Vorteil hat, daß - siehe Fig. 2 - zum Verschwenken des Auslegers von Position 7 in Position 7' dieser nicht in die Mittenposition verfahren zu werden braucht. Außerdem ist dadurch der Vorteil erzielbar, daß keine so genaue Abstimmung der Auslegerlänge und der Abmessungen des Supports 11 und des Tragkörpers 9 auf die Innenkonturen der Dampferzeugerkammer vorgenommen zu werden braucht; damit wäre ein solcher Manipulator universeller, d.h. für verschiedene Dampferzeugergrößen mit unterschiedlichen Primärkammerabmessungen, einsetzbar.
- Zusätzlich zu den Spreizdornen kann eine noch bessere, schwingungssichere Abstützung des Manipulators M innerhalb der Primärkammerhälfte Ib dadurch erreicht werden, daß der Tragkörper 9 eine Stützeinrichtung 15 mit mindestens einem seitlich gegen die Trennwand 4 verspannbaren Stützfuß 15.1 aufweist. Dabei handelt es sich vorteilhaft um eine Pneumatikkolben-Zylinder-Anordnung. Der Stützfuß 15.1 ist dabei z.B. mit einem Kugelgelenk an die Kolbenstange 15.2 angelenkt, um sich der Wölbung der Trennwand 4 anzupassen.
- Die strichpunktierte Teildarstellung des Manipulators M im linken Teil der Figur 1 innerhalb der Primärkammerhälfte 1a verdeutlicht, daß es möglich ist, mit dem Mundstück 6 bis in spitzwinklige Nischen 16, die durch die Konvex-Wölbung der Trennwand 4 bedingt sind, hineinzufahren, wobei jedoch an die Flexibilität von Führungs-und Versorgungsschlauch 5.2, 5.1 besondere Anforderungen gestellt werden.
- Im Falle eines Geradrohrdampferzeugers ist die Primärkammer des Dampferzeugers nicht durch eine Trennwand 4 unterteilt; in diesem Falle wäre es vorteilhaft, einen Manipulator M zu verwenden, der durch Verdoppelung, d.h. Spiegelung an seiner Spreizdornverbindungsachse entstanden zu denken ist und damit beidseits der Längenachse eines auf diese Weise verdoppelten Tragkörpers'9 je einen Support 11 mit Ausleger 7 aufweist. In diesem Falle konnten sogar beide Schwenkarme gleichzeitig arbeiten, wodurch die etwa halbe Prüfzeit im Vergleich zu einem Manipulator mit nur einem Ausleger erzielbar wäre.
- Der Manipulator M wird bei entwässerter Dampferzeuger-Primärkammer durch das Mannloch ML (dessen nicht dargestellter Deckel zu diesem Zweck abgenommen ist) eingeführt und in die aus Fig. 2 am besten erkennbare Prüfposition gebracht. Dazu ist nur ein kurzzeitiger Aufenthalt von Bedienungspersonal in Schutzanzügen in der Primärkammer erforderlich. Nach Durchführung der Prüfung wird der Manipulator M entsprechend-wieder demontiert und herausgenommen. Es ist auch grundsätzlich möglich, um einen Einstieg von Bedienungspersonal in die Dampferzeuger-Primärkammer zu umgehen, am Mannlochstutzen ML1 ein von außen durch den Stutzen bis hinein in die Primärkammer ragendes Schienensystem zu befestigen, an dem der Manipulator M außen aufgegleist wird und sodann fernbedient in seine Prüfposition verfahren werden kann, wie dies in der DE-OS 28 30 306 bereits erläutert ist.
Claims (5)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE3029811 | 1980-08-06 | ||
| DE19803029811 DE3029811A1 (de) | 1980-08-06 | 1980-08-06 | Manipulator zur fernbedienbaren inspektion und gegebenenfalls reparatur von waermtauscherrohren |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP0045454A2 true EP0045454A2 (de) | 1982-02-10 |
| EP0045454A3 EP0045454A3 (en) | 1982-04-14 |
| EP0045454B1 EP0045454B1 (de) | 1984-05-02 |
Family
ID=6109031
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP81105840A Expired EP0045454B1 (de) | 1980-08-06 | 1981-07-23 | Manipulator zum Positionieren einer Rohrsonde |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US4438805A (de) |
| EP (1) | EP0045454B1 (de) |
| JP (1) | JPS5754090A (de) |
| DE (2) | DE3029811A1 (de) |
| ES (1) | ES8206251A1 (de) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2513927A1 (fr) * | 1981-10-05 | 1983-04-08 | Framatome Sa | Tele-manipulateur d'intervention dans une boite a eau de generateur de vapeur |
| EP0120355A2 (de) * | 1983-03-22 | 1984-10-03 | Kraftwerk Union Aktiengesellschaft | Werkeug zum fernbedienbaren Reinigen der Rohrenden eines Rohrbündels |
| FR2585501A1 (fr) * | 1985-07-24 | 1987-01-30 | Thome Jean Patrick | Automatismes d'intervention pour generateurs de vapeur de reacteurs nucleaires |
| FR2613652A1 (fr) * | 1987-04-10 | 1988-10-14 | Thome Paul | Telemanipulateur de metrologie pour generateurs de vapeur de centrales nucleaires |
| FR2895791A1 (fr) * | 2005-12-29 | 2007-07-06 | Framatome Anp Sas | Procede de reparation d'au moins une zone de raccordement d'une plaque de partition sur une plaque tubulaire d'une boite a eau d'un echangeur de chaleur. |
| CN112680848A (zh) * | 2020-12-08 | 2021-04-20 | 安徽颍上县富颍纺织有限公司 | 一种具有防静电效果的混纺棉纱 |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2503920B1 (fr) * | 1981-04-08 | 1987-08-21 | Intercontrole Sa | Dispositif pour le positionnement d'un organe en vis-a-vis des perforations d'une plaque |
| DE3122660C2 (de) * | 1981-06-06 | 1986-06-19 | Brown Boveri Reaktor GmbH, 6800 Mannheim | Einrichtung zur Inspektion und/oder zur Reparatur der Rohre eines Dampferzeugers einer Kernkraftanlage |
| US4576546A (en) * | 1981-10-15 | 1986-03-18 | Westinghouse Electric Corp. | Method for servicing a steam generator |
| FR2526532A1 (fr) * | 1982-05-07 | 1983-11-10 | Intercontrole Sa | Appareil pour le controle des tubes d'un echangeur de chaleur a une distance donnee de l'extremite de ces tubes |
| DE3300460C2 (de) * | 1983-01-08 | 1985-12-12 | Brown Boveri Reaktor GmbH, 6800 Mannheim | Vorrichtung zur Prüfung und/oder zur Reparatur von Dampferzeugerrohren |
| US4804038A (en) * | 1983-10-11 | 1989-02-14 | The Babcock & Wilcox Company | Remotely installed, operated and removed manipulator for steam generator |
| DE3430384A1 (de) * | 1984-08-17 | 1986-02-20 | Kraftwerk Union AG, 4330 Mülheim | Verfahren und vorrichtung zum elektropolieren der innenoberflaeche von u-foermigen waermetauscherrohren |
| DE3509177C1 (de) * | 1985-03-14 | 1986-10-02 | Brown Boveri Reaktor GmbH, 6800 Mannheim | Einrichtung zum Einbringen eines zylindrischen Koerpers,insbesondere einer Huelse,in ein Rohr eines Dampferzeugers |
| US4757258A (en) * | 1985-11-27 | 1988-07-12 | Westinghouse Electric Corp. | Probe carrier system for inspecting boiler tubes |
| US4793056A (en) * | 1986-04-25 | 1988-12-27 | Mitsubishi Jukogyo Kabushiki Kaisha | Plug removal apparatus |
| JPS6367702U (de) * | 1986-10-15 | 1988-05-07 | ||
| US4945979A (en) * | 1988-06-23 | 1990-08-07 | Westinghouse Electric Corp. | Robotic arm for delivering a tube plugging tool |
| US5265667A (en) * | 1989-09-14 | 1993-11-30 | Westinghouse Electric Corp. | Robotic arm for servicing nuclear steam generators |
| NL9100543A (nl) * | 1991-03-27 | 1992-10-16 | Vermaat Technics Bv | Robot voor het uitvoeren van werkzaamheden in een warmtewisselaar. |
| US5265129A (en) * | 1992-04-08 | 1993-11-23 | R. Brooks Associates, Inc. | Support plate inspection device |
| US5675096A (en) * | 1994-12-14 | 1997-10-07 | Westinghouse Electric Corporation | Apparatus and method for removing a wall portion from a wall of a tubular member |
| US5543599A (en) * | 1994-12-14 | 1996-08-06 | Westinghouse Electric Corporation | Electron discharge machining apparatus and method |
| DE19837683C2 (de) | 1998-08-19 | 2003-02-20 | Framatome Anp Gmbh | Auffangvorrichtung und Auffanggefäß zum Auffangen von Ablagerungen aus Wärmetauschrohren |
| US7314343B2 (en) * | 2002-07-22 | 2008-01-01 | Westinghouse Electric Co. Llc | Miniature manipulator for servicing the interior of nuclear steam generator tubes |
| US7533715B1 (en) * | 2003-09-26 | 2009-05-19 | Areva Np Inc. | Tube walker for examination and repair of steam generators |
| CN100582641C (zh) * | 2005-04-30 | 2010-01-20 | 江从铨 | 汽轮发电机凝汽器在线自动冲洗装置及方法 |
| FR2895790B1 (fr) * | 2005-12-29 | 2008-09-12 | Framatome Anp Sas | Dispositif et procede d'intervention dans une boite a eau d'un echangeur de chaleur. |
| US20100329408A1 (en) * | 2009-06-24 | 2010-12-30 | Sergey Fiodorov | Systems, Apparatuses and Methods of Gripping, Cutting and Removing Objects |
| JP5314609B2 (ja) * | 2010-01-27 | 2013-10-16 | 三菱重工業株式会社 | 水室内作業装置 |
| JP2011247829A (ja) * | 2010-05-28 | 2011-12-08 | Mitsubishi Heavy Ind Ltd | 水室内作業装置および水室内作業装置の設置方法 |
| JP5656674B2 (ja) * | 2011-02-02 | 2015-01-21 | 三菱重工業株式会社 | 伝熱管の検査装置および検査方法 |
| CA3083053A1 (en) * | 2019-06-07 | 2020-12-07 | Battelle Memorial Institute | Heat exchanger assemblies and methods |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2830306A1 (de) * | 1978-07-10 | 1980-01-24 | Kraftwerk Union Ag | Pruefeinrichtung fuer einen waermetauscher |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AT336926B (de) * | 1972-12-22 | 1977-06-10 | Siemens Ag | Inspektions- und reparatureinrichtung fur dampferzeuger |
| JPS5157489A (en) * | 1974-11-15 | 1976-05-19 | Mitsubishi Heavy Ind Ltd | Jidokensasochino kontorooruhoho |
| FR2309314A1 (fr) * | 1974-12-05 | 1976-11-26 | Framatome Sa | Dispositif de positionnement selectif d'un organe sur une plaque tubulaire |
| US4018346A (en) * | 1975-11-18 | 1977-04-19 | Combustion Engineering, Inc. | Mounting arrangement for anchor fingers on a surface traversing apparatus |
| JPS60621B2 (ja) * | 1976-12-06 | 1985-01-09 | 三菱重工業株式会社 | 細管探傷装置 |
| US4205940A (en) * | 1978-03-21 | 1980-06-03 | Westinghouse Electric Corp. | Apparatus for remotely repairing tubes in a steam generator |
| US4213732A (en) * | 1978-04-13 | 1980-07-22 | Westinghouse Electric Corp. | Apparatus for remotely repairing tubes in a steam generator |
| US4200424A (en) * | 1978-04-14 | 1980-04-29 | Westinghouse Electric Corp. | Remotely controlled tool positioning table |
| US4193735A (en) * | 1978-04-24 | 1980-03-18 | Combustion Engineering, Inc. | Work table for a stepped platform |
| US4302146A (en) * | 1978-08-23 | 1981-11-24 | Westinghouse Electric Corp. | Probe positioner |
-
1980
- 1980-08-06 DE DE19803029811 patent/DE3029811A1/de not_active Ceased
-
1981
- 1981-07-23 DE DE8181105840T patent/DE3163390D1/de not_active Expired
- 1981-07-23 EP EP81105840A patent/EP0045454B1/de not_active Expired
- 1981-08-03 US US06/289,153 patent/US4438805A/en not_active Expired - Fee Related
- 1981-08-04 JP JP56122366A patent/JPS5754090A/ja active Pending
- 1981-08-05 ES ES504571A patent/ES8206251A1/es not_active Expired
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2830306A1 (de) * | 1978-07-10 | 1980-01-24 | Kraftwerk Union Ag | Pruefeinrichtung fuer einen waermetauscher |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2513927A1 (fr) * | 1981-10-05 | 1983-04-08 | Framatome Sa | Tele-manipulateur d'intervention dans une boite a eau de generateur de vapeur |
| EP0077245A1 (de) * | 1981-10-05 | 1983-04-20 | Framatome | Manipulator zum fernbedienbaren Eingreifen im Wasserbehälter eines Dampferzeugers |
| EP0120355A2 (de) * | 1983-03-22 | 1984-10-03 | Kraftwerk Union Aktiengesellschaft | Werkeug zum fernbedienbaren Reinigen der Rohrenden eines Rohrbündels |
| EP0120355A3 (en) * | 1983-03-22 | 1985-04-17 | Kraftwerk Union Aktiengesellschaft | Tool for the remote cleaning of the pipe ends of a pipe bundle |
| FR2585501A1 (fr) * | 1985-07-24 | 1987-01-30 | Thome Jean Patrick | Automatismes d'intervention pour generateurs de vapeur de reacteurs nucleaires |
| FR2613652A1 (fr) * | 1987-04-10 | 1988-10-14 | Thome Paul | Telemanipulateur de metrologie pour generateurs de vapeur de centrales nucleaires |
| FR2895791A1 (fr) * | 2005-12-29 | 2007-07-06 | Framatome Anp Sas | Procede de reparation d'au moins une zone de raccordement d'une plaque de partition sur une plaque tubulaire d'une boite a eau d'un echangeur de chaleur. |
| US7896220B2 (en) | 2005-12-29 | 2011-03-01 | Areva Np | Process for the repair of at least one connecting area between a partition plate and a tube plate of a water chamber of a heat exchanger |
| CN112680848A (zh) * | 2020-12-08 | 2021-04-20 | 安徽颍上县富颍纺织有限公司 | 一种具有防静电效果的混纺棉纱 |
Also Published As
| Publication number | Publication date |
|---|---|
| US4438805A (en) | 1984-03-27 |
| DE3163390D1 (en) | 1984-06-07 |
| DE3029811A1 (de) | 1982-02-18 |
| EP0045454B1 (de) | 1984-05-02 |
| EP0045454A3 (en) | 1982-04-14 |
| ES504571A0 (es) | 1982-08-16 |
| ES8206251A1 (es) | 1982-08-16 |
| JPS5754090A (de) | 1982-03-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0045454B1 (de) | Manipulator zum Positionieren einer Rohrsonde | |
| DE2640055C3 (de) | Rohrkrfimmermanipulator, insbesondere zur Ultraschallprüfung bei Kernreaktoranlagen | |
| EP0162309B1 (de) | Vorrichtung zum Reinigen radioaktiv kontaminierter Rohrbündel | |
| EP0066791B1 (de) | Einrichtung zur Ausführung von Inspektionsarbeiten an einem Dampferzeuger für Kernreaktoren und ein Verfahren zum Einbringen der Einrichtung in eine Kammer eines Dampferzeugers | |
| DE2826106C2 (de) | Anordnung für den Transport einer Positioniervorrichtung im Inneren eines Dampferzeugers | |
| DE69710444T2 (de) | Vorrichtung zum Laden von Rohren auf Bearbeitungsmaschinen, insbesondere auf Rohrbiegemaschinen | |
| DE2557992A1 (de) | Pruefsystemtraeger zum pruefen von stutzennaehten, rohranschlussnaehten und stutzenkanten mit ultraschall bei druckgefaessen, insbesondere reaktordruckbehaeltern von kernkraftwerken | |
| DE69004602T2 (de) | Interventionsvorrichtung, insbesondere zur Prüfung, Inspektion und Wartung von Wärmeaustauschern. | |
| EP0513864A2 (de) | Verfahren zum Betrieb einer Rohrbiegemaschine | |
| EP0137077B1 (de) | Verfahren und Einrichtung zum Auffinden defekter Brennstabhüllrohre wassergekühlter Kernreaktoren | |
| LU84764A1 (de) | Kompakter schachtofen-stopfkanonenschwenkantrieb fuer grosse schwenkwinkel | |
| DE69218442T2 (de) | Vorrichtung zum Positionieren eines Werkzeugesin einem von einer öffnung versehenen Wandbegrenzten Gefäss. | |
| DE2830306C2 (de) | Prüfeinrichtung für einen Wärmetauscher | |
| DE2733862C3 (de) | Manipulator zur Inspektion und gegebenenfalls Reparatur der Rohre von Wärmetauschern, insbesondere von Dampferzeugern für Kernreaktoren | |
| WO2007099014A1 (de) | Lithotripsiegerät | |
| EP0856118B1 (de) | Rohrinnenmanipulator zum prüfen oder bearbeiten der innenoberfläche eines rohres | |
| EP0124824B1 (de) | Positioniereinrichtung zur fernbedienbaren Inspektion, Reinigung und Reparatur der parallelen Rohre eines Rohrbündels | |
| DE4029027C2 (de) | Vorrichtung zur Wasserstrahlbearbeitung von Oberflächen mit einer Strahldüse und einer gelenkigen Strahldüsenhalterung | |
| DE2726547A1 (de) | Pruefmanipulator zur fernbedienbaren aussenpruefung der rohranschlussnaehte von druckbehaeltern, insbesondere reaktordruckbehaeltern | |
| DE3873117T2 (de) | Arbeitssystem fuer primaere rohrleitungen und wasserkammer des dampferzeugers eines kernreaktors. | |
| DE2914126A1 (de) | Vorrichtung zum aufbringen von feuerfestem material, insbesondere fuer die reparatur der auskleidungen von huettenwerkseinrichtungen | |
| DE69003446T2 (de) | Einrichtung zum Positionieren eines Gerätes in eine zylindrische Höhlung mit regelmässig geordneten Perforationen. | |
| WO1997014910A2 (de) | Rohrinnenmanipulator zum prüfen oder bearbeiten der innenoberfläche eines rohres | |
| DE3823888C1 (en) | Equipment for working on components in inaccessible places in a nuclear reactor pressure container | |
| DE2436938A1 (de) | Vorrichtung zum einfuehren von pruefund arbeitsgeraeten durch einen kanal von begrenztem querschnitt |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 19811028 |
|
| AK | Designated contracting states |
Designated state(s): CH DE FR GB SE |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Designated state(s): CH DE FR GB SE |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Designated state(s): CH DE FR GB LI SE |
|
| REF | Corresponds to: |
Ref document number: 3163390 Country of ref document: DE Date of ref document: 19840607 |
|
| ET | Fr: translation filed | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 19840630 Year of fee payment: 4 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 19840720 Year of fee payment: 4 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 19840925 Year of fee payment: 4 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 19841023 Year of fee payment: 4 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Effective date: 19850724 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Effective date: 19850731 Ref country code: CH Effective date: 19850731 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee | ||
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19860328 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Effective date: 19860402 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Effective date: 19881118 |
|
| EUG | Se: european patent has lapsed |
Ref document number: 81105840.3 Effective date: 19860730 |