-
TECHNISCHES GEBIET
-
Diese Anmeldung beansprucht den Vorteil der
japanischen Patentanmeldung mit der Nr. 2010-045443 , die am 2. März 2010 eingereicht wurde und deren gesamte Offenbarung hiermit unter Bezugnahme eingegliedert ist.
-
Die vorliegende Erfindung bezieht sich auf eine Hybridantriebsvorrichtung, die Räder durch die Rotationskraft einer Vielzahl von Leistungsquellen über einen Getriebemechanismus antreibt.
-
HINTERGRUND
-
Es gibt eine herkömmliche Hybridantriebsvorrichtung, bei der die Rotationskraft einer Kraftmaschine durch einen Leistungsverzweigungsmechanismus aufgeteilt wird, auf eine Achse und einen ersten Motorgenerator oder einen zweiten Motorgenerator übertragen wird, eine Regeneration durch einen der Motorgeneratoren von dem ersten Motorgenerator und dem zweiten Motorgenerator durchführt, und die Räder durch den anderen Motorgenerator antreibt.
-
Beispielsweise ist in der Patentdruckschrift 1 ein elektromechanisches Getriebe offenbart, das Folgendes aufweist: ein Eingabeelement zum Aufnehmen von Leistung einer Antriebsaggregatleistungsquelle; ein Ausgabeelement zum Übertragen von Ausgabeleistung von dem Getriebe; einen ersten und einen zweiten Motorgenerator; eine Energiespeichereinheit zum gegenseitigen Austausch elektrischer Leistung zwischen dem ersten und dem zweiten Motorgenerator; eine Steuereinheit zum Einstellen des gegenseitigen Austauschs der elektrischen Leistung zwischen der Energiespeichereinheit und dem ersten und dem zweiten Motorgenerator und zum Einstellen des gegenseitigen Austauschs elektrischer Leistung zwischen dem ersten und dem zweiten Motorgenerator; und drei Planetengetriebevorrichtungen(-sätze), die koaxial ausgerichtet sind; wobei jede Planetengetriebevorrichtung ein erstes und ein zweites Zahnradelement verwendet, die jeweils mit einer Vielzahl von Planetenzahnrädern in Eingriff sind, die an einem Träger installiert sind, der in der jeweiligen entsprechenden Planetengetriebevorrichtung eingebaut ist; wobei der erste und der zweite Motorgenerator koaxial zueinander und zu den drei Planetengetriebevorrichtungen ausgerichtet sind, wobei zumindest eines der Zahnradelemente der ersten oder der zweiten Planetengetriebevorrichtung mit dem ersten Motorgenerator verbunden ist, und zumindest eines der Zahnradelemente der ersten oder der zweiten Planetengetriebevorrichtung mit dem zweiten Motorgenerator verbunden ist, wobei es ein Mittel zum funktionalen Verbinden der Träger, die mit der ersten, der zweiten und der dritten Planetengetriebevorrichtung verbunden sind, miteinander und mit dem Ausgabeelement gibt, wobei von den Zahnradelementen der ersten oder der zweiten Planetengetriebevorrichtung ein solches Zahnradelement, das nicht mit dem ersten Motorgenerator verbunden ist, kontinuierlich mit einem der Zahnradelemente der dritten Planetengetriebevorrichtung verbunden ist, wobei von der ersten oder der zweiten Planetengetriebevorrichtung das jenige Zahnradelement, das nicht mit dem ersten Motorgenerator verbunden ist, funktional mit dem Eingabeelement verbunden ist, und das Zahnradelement der dritten Planetengetriebevorrichtung, das nicht mit der ersten oder der zweiten Planetengetriebevorrichtung verbunden ist, wahlweise mit der Masse verbunden ist.
-
Bei dem in der Patendruckschrift 1 offenbarten elektromechanischen Getriebe ist es durch Steuern der Drehzahl (upm) des ersten Motorgenerators möglich, die Kraftmaschinendrehzahl auf eine Drehzahl festzulegen, die den Kraftstoffverbrauch optimiert, und wenn dies durchgeführt wird, ist es für die Gesamtvorrichtung möglich, ein erforderliches und ausreichendes Drehmoment an der Ausgabewelle zu erhalten, indem der erste Motorgenerator elektrische Leistung erzeugt und indem dann der zweite Motorgenerator mit dieser elektrischen Leistung angetrieben wird. Wie berichtet wurde, hat das elektromechanische Getriebe zwei Betriebsmodi; einen ersten Modus, der zum Start der Bewegung und unmittelbar danach in dem Zustand mit relativ niedriger Geschwindigkeit festgelegt wird, und einen zweiten Modus, der in einem Zustand festgelegt wird, in dem die Geschwindigkeit des Fahrzeugs zu einem gewissen Ausmaß zugenommen hat. Genauer gesagt wird in dem ersten Modus, in dem ein relativ großes Antriebsdrehmoment erforderlich ist, durch Festhalten des Hohlrads des Planetengetriebemechanismus, der sich an der Ausgabewellenseite befindet, dieser Planetengetriebemechanismus dazu gebracht, als ein Untersetzungsgetriebezug zu funktionieren, jedoch werden in dem zweiten Modus, in dem die Geschwindigkeit des Fahrzeugs auf ein gewisses Ausmaß zugenommen hat, das Sonnenrad und der Träger dieses Planetengetriebemechanismus verbunden und integriert, so dass der Planetengetriebemechanismus keinen Betrieb zum Erhöhen oder Verringern der Geschwindigkeit durchführt.
-
Die Patentdruckschrift 2 offenbart eine Hybridantriebsvorrichtung, in der eine Brennkraftmaschine und ein erster Elektromotor sowie ein zweiter Elektromotor mit einer Generatorfunktion über einen Getriebemechanismus, der einen Planetengetriebemechanismus aufweist, an einem Ausgabeelement angeschlossen sind, wobei es ein Paar Planetengetriebemechanismen gibt und jeder Planetengetriebemechanismus drei Rotationselemente hat, die voneinander verschiedene Betriebe durchführen; wobei es zumindest drei Eingriffsvorrichtungen gibt, die den Pfad zum Übertragen von Leistung auf das Ausgabeelement über diese zwei Planetengetriebemechanismen umschalten; und wobei der Leistungsübertragungspfad in drei verschiedenen Arten festgelegt wird, in welchen die gegenseitigen Beziehungen zwischen den Betriebszuständen des ersten Elektromotors und des zweiten Elektromotors zum Festlegen des Verhältnisses der Drehzahl der Brennkraftmaschine und der Drehzahl des Ausgabeelements auf einen bestimmten Wert gemäß dem Eingriffszustand und dem gelösten Zustand der drei Eingriffsvorrichtungen verschieden ist. Bei dieser Hybridantriebsvorrichtung unterscheiden sich die gegenseitigen Beziehungen der Betriebszustände der jeweiligen Elektromotoren beim Festlegen eines bestimmten Getriebeübersetzungsverhältnisses für jeden Leistungsübertragungspfad. Daher ist es möglich, die Brennkraftmaschine in einem effizienten Zustand zu betreiben, wenn sie in einem Fahrzeug montiert ist, indem ein geeigneter Leistungsübertragungspfad für eine niedrige Geschwindigkeit, eine mittlere Geschwindigkeit und eine hohe Geschwindigkeit ausgewählt wird, und eine Leistungsübertragung mittels elektrischer Energie eines jeden Elektromotors wird unterdrückt, sodass als ein Ergebnis die Leistung in jedem Geschwindigkeitsbereich effizient auf das Ausgabeelement übertragen wird, wodurch es möglich ist, den Kraftstoffverbrauch zu verbessern.
-
Stand der Technik
-
Patentdruckschriften
-
- Patentdruckschrift 1: JP-A-2000-62483
- Patentdruckschrift 2: JP-A-2006-282069
-
ZUSAMMENFASSUNG
-
Technisches Problem
-
Der gesamte Offenbarungsinhalt der Patentdruckschriften 1 und 2 ist hiermit unter Bezugnahme eingegliedert. Durch die vorliegende Erfindung wird die folgende Analyse angegeben.
-
Bei dem in der Patentdruckschrift 1 offenbarten elektromechanischen Getriebe wird der Betriebsmodus während der niedrigen Fahrzeuggeschwindigkeit auf den ersten Modus festgelegt und wird während der hohen Fahrzeuggeschwindigkeit auf den zweiten Modus festgelegt, und in jedem Modus funktioniert ein Motorgenerator als ein Generator und der andere Motorgenerator nimmt Elektrizität auf, die von dem einen Motorgenerator zugeführt wird und funktioniert als ein Motor. Mit anderen Worten wird zusätzlich zu der Menge der zu dem Ausgabeelement, etwa einer Ausgabewelle von der Kraftmaschine, über einen Getriebemechanismus übertragenen Leistung ein Teil der Leistung in elektrische Leistung umgewandelt und durch Antreiben des Motors mit dieser elektrischen Leistung wird die Leistung über den elektrischen Pfad zu dem Ausgabeelement übertragen. Bei der Leistungsübertragung, die diese Art von Umwandlung zwischen elektrischer Leistung und mechanischer Leistung begleitet, tritt bei dem Prozess zum Ändern der Art dieser Leistung ein unvermeidbarer Verlust auf. Bei dem in der Patentdruckschrift 1 offenbarten elektromechanischen Getriebe wird der Betriebsmodus gemäß der Fahrzeuggeschwindigkeit umgeschaltet, jedoch ist die Anzahl der auswählbaren Modi auf zwei beschränkt, sodass beispielsweise in dem zweiten Modus, wenn die Fahrzeuggeschwindigkeit stark erhöht ist, der Anteil der die Umwandlung zu elektrischer Leistung begleitenden Leistungsübertragung zunimmt. Daher gibt es bei dem in der Patentdruckschrift 1 offenbarten elektromechanischen Getriebe Platz für Verbesserung von dem Gesichtspunkt der Leistungsübertragungsrate oder des Kraftstoffverbrauchs des gesamten Fahrzeugs. Außerdem gibt es in dem elektromechanischen Getriebe, das in der Patentdruckschrift 1 offenbart ist, zwei Motoren und drei Planetengetriebezüge, sodass die Gesamtlänge des Getriebes lang wird, und sodass es ein Problem einer verschlechterten Montagefähigkeit in einem Fahrzeug gibt.
-
Die in der Patentdruckschrift 2 offenbarte Hybridantriebsvorrichtung ist so aufgebaut, dass die Leistungsübertragungspfade der drei oder mehr Arten so festgelegt werden, dass ein weiterer Leistungsübertragungspfad als in dem in der Patentdruckschrift 1 offenbarten elektromechanischen Getriebe vorhanden ist, und selbst wenn die Fahrzeuggeschwindigkeit stark erhöht wird, ist es möglich, den Anteil der die Umwandlung in elektrische Leistung begleitenden Leistungsübertragung zu unterdrücken. In der Hybridantriebsvorrichtung, die in der Patentdruckschrift 2 offenbart ist, wird im Übrigen dann, wenn der Betriebsmodus von dem Niedergeschwindigkeitsmodus auf den Mittelgeschwindigkeitsmodus (Direktkupplungsmodus) geändert wird, das Hohlrad des zweiten Planetengetriebemechanismus festgehalten, sodass es erforderlich ist, die Drehzahl der Brennkraftmaschine zu senken und die Drehzahl des Sonnenrads des ersten Planetengetriebemechanismus zu dem Wert 0 zu machen, und es gibt ein Problem darin, dass der Gangwechsel Zeit benötigt. Außerdem ist bei der in der Patentdruckschrift 2 offenbarten Hybridantriebsvorrichtung der Mittelgeschwindigkeitsmodus ein Direktkupplungsmodus, sodass alle Elemente des Planetengetriebemechanismus kollinear sind, und sogar obwohl es erforderlich ist, die Elemente in einer horizontalen Reihe anzuordnen, gibt es in dem Niedergeschwindigkeitsmodus immer einen Neigungswinkel in dem Kollineargraphen (Nomogramm), sodass es möglich ist, dass beim Durchführen des Gangwechsels ein starker Stoß auftritt.
-
Es ist eine Aufgabe der vorliegenden Erfindung, eine Hybridantriebsvorrichtung bereitzustellen, die in der Lage ist, die Montagefähigkeit in einem Fahrzeug zu verbessern, sowie die Geschwindigkeitsänderungsleistung (oder Gangwechselleistung) zu verbessern, während gleichzeitig die Leistungsübertragungseffizienz und der Kraftstoffverbrauch verbessert werden.
-
Lösung des Problems
-
Eine Hybridantriebsvorrichtung gemäß einem ersten Gesichtspunkt der vorliegenden Erfindung weist Folgendes auf: einen Getriebemechanismus, der Rotationsleistung von einer Brennkraftmaschine auf einen ersten Motorgenerator und einen zweiten Motorgenerator aufteilt und überträgt; eine erste Welle, auf die eine Rotationsleistung von dem ersten Motorgenerator übertragen wird; ein Rotationselement; eine zweite Welle, auf die eine Rotationsleistung von dem Rotationselement übertragen wird; eine dritte Welle, auf die eine Rotationsleistung von der zweiten Welle übertragen wird und die die Räder antreibt; einen ersten Leistungsübertragungsschaltmechanismus, der zwischen einem Zustand, in dem die Rotationsleistung von dem zweiten Motorgenerator auf das Rotationselement übertragen wird, einem Zustand, in dem die Übertragung auf die dritte Welle zugelassen wird, und einem Zustand, in dem die Übertragung auf das Rotationselement und auf die dritte Welle nicht zugelassen werden, umschalten kann; und einen zweiten Leistungsübertragungsschaltmechanismus, der zwischen einem Zustand, in dem die Übertragung der Rotationsleistung von der ersten Welle auf die zweite Welle zugelassen wird, und einem Zustand, in dem die Übertragung auf die zweite Welle nicht zugelassen wird, umschalten kann.
-
In der Hybridantriebsvorrichtung der vorliegenden Erfindung weist der Getriebemechanismus vorzugsweise Folgendes auf: ein Sonnenrad, in welches die Rotationsleistung von der Brennkraftmaschine eingegeben wird; eines oder mehrere Ritzel, das/die mit einem Sonnenrad in Eingriff sind; ein Hohlrad, das mit dem/den Ritzel(n) in Eingriff ist und Rotationsleistung zu dem zweiten Motorgenerator ausgibt; und einen Träger, der das/die Ritzel drehbar stützt und Rotationsleistung zu dem ersten Motorgenerator ausgibt.
-
Vorzugsweise weist die Hybridantriebsvorrichtung der vorliegenden Erfindung ferner eine elektronische Steuervorrichtung auf, die die Betriebe der Brennkraftmaschine, des ersten Motorgenerators, des zweiten Motorgenerators, des ersten Leistungsübertragungsschaltmechanismus und des zweiten Leistungsübertragungsschaltmechanismus steuert.
-
In der Hybridantriebsvorrichtung der vorliegenden Erfindung steuert die elektronische Steuervorrichtung vorzugsweise in dem ersten Modus den ersten Motorgenerator so, dass die Regeneration durch den ersten Motorgenerator zugelassen wird, steuert den zweiten Motorgenerator so, dass der Antrieb durch den zweiten Motorgenerator zugelassen wird, steuert den ersten Leistungsübertragungsschaltmechanismus so, dass das Übertragen der Rotationsleistung von der ersten Welle auf die zweite Welle nicht zugelassen wird, und steuert den zweiten Leistungsübertragungsschaltmechanismus so, dass die Übertragung der Rotationsleistung von dem zweiten Motorgenerator auf das Rotationselement zugelassen wird; in dem zweiten Modus, der dann verwendet wird, wenn die Fahrzeuggeschwindigkeit schneller als in dem ersten Modus ist, steuert sie den ersten Motorgenerator so, dass der Antrieb durch den ersten Motorgenerator zugelassen wird, steuert den zweiten Motorgenerator so, dass die Regeneration durch den zweiten Motorgenerator zugelassen wird, steuert den ersten Leistungsübertragungsschaltmechanismus so, dass das Übertragen der Rotationsleistung von der ersten Welle auf die zweite Welle zugelassen wird, und steuert den zweiten Leistungsübertragungsschaltmechanismus so, dass das Übertragen der Rotationsleistung von dem zweiten Motorgenerator auf die Rotationselemente und die dritte Welle nicht zugelassen wird; und
in dem dritten Modus, der dann verwendet wird, wenn die Fahrzeuggeschwindigkeit schneller als in dem zweiten Modus ist, steuert sie den ersten Motorgenerator so, dass die Regeneration durch den ersten Motorgenerator zugelassen wird, steuert den zweiten Motorgenerator so, dass der Antrieb durch den zweiten Motorgenerator zugelassen wird, steuert den ersten Leistungsübertragungsschaltmechanismus so, dass das Übertragen der Rotationsleistung von der ersten Welle auf die zweite Welle nicht zugelassen wird, und steuert den zweiten Leistungsübertragungsschaltmechanismus so, dass das Übertragen der Rotationsleistung von dem zweiten Motorgenerator auf die dritte Welle zugelassen wird.
-
In der Hybridantriebsvorrichtung der vorliegenden Erfindung schaltet die elektronische Steuervorrichtung vorzugsweise den Modus zwischen dem ersten Modus, dem zweiten Modus und dem dritten Modus auf Grundlage einer Drehzahl (upm) der Brennkraftmaschine und jener der dritten Welle.
-
In der Hybridantriebsvorrichtung der vorliegenden Erfindung führt die elektronische Steuervorrichtung vorzugsweise auf Grundlage der Drehzahl der Brennkraftmaschine und der Drehzahl der dritten Welle das Umschalten des Modus von dem ersten Modus auf den zweiten Modus dann durch, wenn während der Beschleunigung die Drehzahl der ersten Welle mit jener der zweiten Welle übereinstimmt, und führt das Umschalten des Modus von dem zweiten Modus auf den dritten Modus während der Beschleunigung dann aus, wenn die Drehzahl des zweiten Motorgenerators mit jener der dritten Welle übereinstimmt.
-
Vorzugsweise wird die erfindungsgemäße Hybridantriebsvorrichtung in einem Fahrzeug verwendet; das Fahrzeug arbeitet bei einer ersten Geschwindigkeit, einer zweiten Geschwindigkeit, die schneller als die erste Geschwindigkeit ist, und einer dritten Geschwindigkeit, die schneller als die zweite Geschwindigkeit ist, und die elektronische Steuervorrichtung hat einen ersten Modus, der dann verwendet wird, wenn das Fahrzeug bei der ersten Geschwindigkeit betrieben wird, und in diesem ersten Modus steuert sie den ersten Motorgenerator so, dass die Regeneration durch den ersten Motorgenerator zugelassen wird, steuert den zweiten Motorgenerator so, dass der Antrieb durch den zweiten Motorgenerator zugelassen wird, steuert den ersten Leistungsübertragungsschaltmechanismus so, dass das Übertragen von Rotationsleistung von der ersten Welle auf die zweite Welle nicht zugelassen wird, und steuert den zweiten Leistungsübertragungsschaltmechanismus so, dass das Übertragen von Rotationsleistung von dem zweiten Motorgenerator auf das Rotationselement zugelassen wird.
-
Vorzugsweise wird die Hybridantriebsvorrichtung der vorliegenden Erfindung in einem Fahrzeug verwendet, das Fahrzeug wird bei einer ersten Geschwindigkeit, bei einer zweiten Geschwindigkeit, die schneller als die erste Geschwindigkeit ist, und bei einer dritten Geschwindigkeit, die schneller als die zweite Geschwindigkeit ist, betrieben, und die elektronische Steuervorrichtung hat einen zweiten Modus, der dann verwendet wird, wenn das Fahrzeug mit der zweiten Geschwindigkeit betrieben wird, und in diesem zweiten Modus steuert sie den ersten Motorgenerator so, dass der Antrieb durch den ersten Motorgenerator zugelassen wird, steuert den zweiten Motorgenerator so, dass die Regeneration durch den zweiten Motorgenerator zugelassen wird, steuert den ersten Leistungsübertragungsschaltmechanismus so, dass das Übertragen von Rotationsleistung von der ersten Welle auf die zweite Welle zugelassen wird, und steuert den zweiten Leistungsübertragungsschaltmechanismus so, dass das Übertragen einer Rotationsleistung von dem zweiten Motorgenerator auf die Rotationselemente und die dritte Welle nicht zugelassen wird.
-
Die Hybridantriebsvorrichtung der vorliegenden Erfindung wird vorzugsweise in einem Fahrzeug verwendet, wobei das Fahrzeug bei einer ersten Geschwindigkeit, einer zweiten Geschwindigkeit, die schneller als die erste Geschwindigkeit ist, und bei einer dritten Geschwindigkeit, die schneller als die zweite Geschwindigkeit ist, betrieben wird, und die elektronische Steuervorrichtung hat einen dritten Modus, der dann verwendet wird, wenn das Fahrzeug mit der dritten Geschwindigkeit betrieben wird, und in diesem dritten Modus steuert sie den ersten Motorgenerator so, dass die Regeneration durch den ersten Motorgenerator zugelassen wird, steuert den zweiten Motorgenerator so, dass der Antrieb durch den zweiten Motorgenerator zugelassen wird, steuert den ersten Leistungsübertragungsschaltmechanismus so, dass die Übertragung der Rotationsleistung von der ersten Welle auf die zweite Welle nicht zugelassen wird und steuert den zweiten Leistungsübertragungsschaltmechanismus so, dass die Übertragung der Rotationsleistung von dem zweiten Motorgenerator auf die dritte Welle zugelassen wird.
-
Wirkung der Erfindung
-
Gemäß der vorliegenden Erfindung ist es möglich, den Bereich des Untersetzungsverhältnisses zu erweitern, ohne den sogenannten Leistungszirkulationszustand zu betreten, der dann eintritt, wenn der erste Motorgenerator in einem umgekehrten Rotationsleistungszustand betrieben wird und der zweite Motorgenerator in einem erzwungenen Regenerationszustand betrieben wird, sodass es für die Brennkraftmaschine möglich ist, in einem optimalen Kraftstoffverbrauchszustand zu arbeiten, und es ist dadurch möglich, die Leistungsübertragungseffizienz und den Kraftstoffverbrauch zu verbessern. Außerdem gibt es in der Hybridantriebsvorrichtung lediglich einen Planetengetriebemechanismus, sodass die gesamte Länge des Getriebes kurz wird, und somit ist es möglich, die Montagefähigkeit in dem Fahrzeug zu verbessern. Ferner ist es in dem Beschleunigungsprozess eines Fahrzeugs möglich, problemlos die Modi zu schalten, ohne die Drehzahl der Brennkraftmaschine zu senken, sodass der Gangwechsel keine Zeit benötigt, und es ist möglich, den Gangwechsel während der Beschleunigung der Brennkraftmaschine durchzuführen, ohne dass ein Schaltstoß auftritt.
-
KURZBESCHREIBUNG DER ZEICHNUNGEN
-
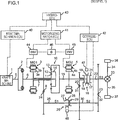
1 ist ein schematisches Schaubild, das den Aufbau einer Hybridantriebsvorrichtung gemäß einem Beispiel 1 der vorliegenden Erfindung schematisch veranschaulicht.
-
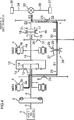
2 ist ein schematisches Schaubild, das einen Leistungsübertragungspfad in dem ersten Modus (Niedergeschwindigkeitsmodus) der Hybridantriebsvorrichtung von Beispiel 1 der vorliegenden Erfindung darstellt.
-
3 ist ein kollineares Diagramm, das sich auf die Drehzahl bezieht, die den Betriebszustand des ersten Modus (Niedergeschwindigkeitsmodus) der Hybridantriebsvorrichtung von Beispiel 1 der vorliegenden Erfindung angibt.
-
4 ist ein schematisches Schaubild, das einen Leistungsübertragungspfad bei einem zweiten Modus (einem Zwischengeschwindigkeitsmodus) in der Hybridantriebsvorrichtung von Beispiel 1 der vorliegenden Erfindung veranschaulicht.
-
5 ist ein kollineares Diagramm, das sich auf die Drehzahl bezieht, die den Betriebszustand beim Ändern von dem ersten Modus auf den zweiten Modus der Hybridantriebsvorrichtung von Beispiel 1 der vorliegenden Erfindung angibt.
-
6 ist ein schematisches Schaubild, das einen Leistungsübertragungspfad bei einem dritten Modus (Hochgeschwindigkeitsmodus) in der Hybridantriebsvorrichtung von Beispiel 1 der vorliegenden Erfindung darstellt.
-
7 ist ein kollinearer Graph, der sich auf die Drehzahl bezieht, die den Betriebszustand beim Ändern von dem zweiten Modus auf den dritten Modus der Hybridantriebsvorrichtung von Beispiel 1 der vorliegenden Erfindung angibt.
-
MODI
-
Eine Hybridantriebsvorrichtung gemäß einer beispielhaften Ausführungsform der vorliegenden Erfindung weist Folgendes auf: einen Getriebemechanismus (10 in 1), der eine Rotationsleistung einer Brennkraftmaschine (1 in 1) auf einen ersten Motorgenerator (3 in 1) und einen zweiten Motorgenerator (4 in 1) verteilt und überträgt; eine erste Welle (25 in 1), auf die eine Rotationsleistung von dem ersten Motorgenerator (4 in 1) übertragen wird; ein Rotationselement (20 in 1); eine zweite Welle (30 in 1), auf die eine Rotationsleistung von dem Rotationselement übertragen wird; eine dritte Welle (22 in 1), auf die eine Rotationsleistung von der zweiten Welle übertragen wird, und die die Räder (36, 37 in 1) antreibt; einen ersten Leistungsübertragungsschaltmechanismus (16 in 1), der in der Lage ist, zwischen einem Zustand, der die Übertragung einer Rotationsleistung von dem zweiten Motorgenerator auf das Rotationselement zulässt, einem Zustand, der die Übertragung auf die dritte Welle zulässt, und einem Zustand, der die Übertragung auf das Rotationselement und die dritte Welle verhindert, umzuschalten; und einen zweiten Leistungsübertragungsschaltmechanismus (26 in 1), der in der Lage ist, zwischen einem Zustand, der die Übertragung der Rotationsleistung von der ersten Welle auf die zweite Welle zulässt und einem Zustand, der die Übertragung auf die zweite Welle verhindert, umzuschalten.
-
Beim Zuordnen der Bezugszeichen zu den Zeichnungen in dieser Beschreibung werden die Bezugszeichen lediglich als ein Hilfsmittel erwähnt, um beim Verständnis der Erläuterung zu helfen, und es ist nicht beabsichtigt, dass sie die Erfindung auf die in den Zeichnungen dargestellten Modi beschränkt.
-
[Beispiel 1]
-
Unter Bezugnahme auf die Zeichnungen wird Hybridantriebsvorrichtung von Beispiel 1 der vorliegenden Erfindung erläutert. 1 ist ein schematisches Schaubild, das den Aufbau der Hybridantriebsvorrichtung von diesem Beispiel 1 der vorliegenden Erfindung schematisch darstellt.
-
Die Hybridantriebsvorrichtung ist eine Vorrichtung, die die Rotationsleistung einer Kraftmaschine 1 durch einen Planetengetriebemechanismus 10 aufteilt und die Rotationsleistung auf eine Achse und einen ersten Motorgenerator 3 oder einen zweiten Motorgenerator 4 überträgt und ferner die Regeneration durch einen von dem ersten Motorgenerator 3 und dem zweiten Motorgenerator 4 durchführt und die Räder 36, 37 durch den anderen Motorgenerator antreibt. Die Hybridantriebsvorrichtung weist Folgendes auf: eine Kraftmaschine 1, eine Drehmomentenübertragungsvorrichtung 2, einen ersten Motorgenerator 3 (MG1), einen zweiten Motorgenerator 4 (MG2), eine Kurbelwelle 5, eine Welle 6, eine Welle 7, ein Antriebszahnrad 8, einen Planetengetriebemechanismus 10, eine Welle 15, eine Synchronisierungseinrichtung 16, ein Antriebszahnrad 20, eine Welle 22 (S3), ein Abtriebszahnrad 23, ein Abtriebszahnrad 24, eine Welle 25 (S1), eine Synchronisierungseinrichtung 26, eine Welle 30 (S2), ein Abtriebszahnrad 31, ein Antriebszahnrad 32, ein Differenzialgerät 33, Wellen 34, 35, Räder 36, 37, eine Kraftmaschinensteuervorrichtung 40, eine Motorgeneratorsteuervorrichtung 41, eine Getriebesteuervorrichtung 42, eine Hybridsteuervorrichtung 43, Inverter 44, 45, eine elektrische Speichervorrichtung (Batterie) 46 und Stellglieder 47, 48.
-
Die Kraftmaschine 1 ist eine Brennkraftmaschine, die Kraftstoff im Inneren eines Zylinders zündet und verbrennt und die dann unter Verwendung der thermischen Energie eine Rotationsleistung ausgibt, und die ein (in den Figuren nicht dargestelltes) Injektorstellglied, das die Menge des einzuspritzenden Kraftstoffs einstellt, sowie ein Zündstellglied aufweist, das die Zündzeitgebung zum Zünden des Kraftstoffs einstellt. Die Rotationsleistung der Kraftmaschine 1 wird mittels der Kurbelwelle 5 auf die Drehmomentenübertragungsvorrichtung 2 übertragen. Die Kraftmaschine 1 ist so an der Kraftmaschinensteuervorrichtung 40 angeschlossen, dass eine Kommunikation möglich ist, und wird durch die Kraftmaschinensteuervorrichtung 40 gesteuert.
-
Die Drehmomentenübertragungsvorrichtung 2 ist eine Vorrichtung, durch die es möglich ist, die Rotationsleistung von der Kurbelwelle 5 untrennbar auf die Welle 6 zu übertragen. Ein Drehmomentenwandler, eine Kupplung, eine Fluidkopplung und dergleichen können als die Drehmomentenübertragungsvorrichtung 2 verwendet werden. Die Rotationsleistung von der Drehmomentenübertragungsvorrichtung 2 wird über eine Welle 6 auf einen Träger 14 des Planetengetriebemechanismus 10 übertragen.
-
Der erste Motorgenerator 3 (MG1) ist ein synchroner Generatormotor, der nicht nur in der Lage ist, als ein elektrischer Generator zu funktionieren, sondern auch als ein elektrischer Motor zu funktionieren. Der erste Motorgenerator 3 hat einen Stator 3b, der an dem Getriebegehäuse (in der Figur nicht dargestellt) befestigt ist, und einen Rotor 3a, der sich im Inneren des Stators 3b dreht. Um den Stator 3b ist eine Spule gewickelt und die Spule ist über einen Inverter 44 an der elektrischen Speichervorrichtung elektrisch angeschlossen. Der Rotor 3a ist an eine Welle 7 gekoppelt und dreht sich zusammen mit einem Sonnenrad 11 des Planetengetriebemechanismus 10 und dem Antriebszahnrad 8 mittels der Welle 7. Der erste Motorgenerator 3 wird über den Inverter 44 durch die Motorgeneratorsteuervorrichtung 41 gesteuert.
-
Der zweite Motorgenerator 4 (MG2) ist ein synchroner Generatormotor, der nicht nur in der Lage ist, als ein elektrischer Generator zu funktionieren, sondern auch als ein elektrischer Motor zu funktionieren. Der zweite Motorgenerator 4 hat einen Stator 4b, der an dem Getriebegehäuse (in der Figur nicht dargestellt) befestigt ist, und hat einen Rotor 4a, der sich in dem Inneren des Stators 4b dreht. Um den Stator 4b ist eine Spule gewickelt und die Spule ist über einen Inverter 45 elektrisch an einer elektrischen Speichervorrichtung angeschlossen. Der Rotor 4a ist an die Welle 15 gekoppelt und dreht sich im Einklang mit dem Hohlrad 13 des Planetengetriebemechanismus 10 und dem Antriebsrad 17 der Synchronisierungseinrichtung 16 über die Welle 15. Der zweite Motorgenerator 4 wird über den Inverter 45 durch die Motorgeneratorsteuervorrichtung 41 gesteuert.
-
Die Welle 7 ist eine Rotationswelle, die sich einstückig zusammen mit dem Rotor 3a des ersten Motorgenerators 3, dem Sonnerad 11 des Planetengetriebemechanismus 10 und dem Antriebszahnrad 8 dreht. Die Drehzahl (upm) der Welle 7 entspricht jener des ersten Motorgenerators 3 (MG1). Das Antriebsrad 8 hat ein bestimmtes Übersetzungsverhältnis (beispielsweise 1:1) mit Bezug auf das Abtriebszahnrad 24 und ist damit in Eingriff. Wenn das Übersetzungsverhältnis des Antriebszahnrads 8 und des Abtriebszahnrads 24 den Wert 1:1 hat, und sich die Welle 7 eine Umdrehung in der Vorwärtsrichtung dreht, dann dreht sich die Welle 35 (S1) eine Umdrehung in der Rückwärtsrichtung.
-
Der Planetengetriebemechanismus 10 ist ein Leistungsverzweigungsmechanismus, der die Rotationsleistung von der Kraftmaschine 1 verzweigt und die Rotationsleistung auf den ersten Motorgenerator 3 oder den zweiten Motorgenerator 4 überträgt. Der Planetengetriebemechanismus 10 hat ein Sonnenrad 11, ein Ritzel 12, ein Hohlrad 13 und einen Träger 14. Das Sonnenrad 11 ist mit dem Ritzel 12 in Eingriff und dreht sich mittels der Welle 7 einstückig mit dem Rotor 3a des ersten Motorgenerators 3 und dem Antriebszahnrad 8. Das Ritzel 12 ist mit dem Sonnenrad 11 und dem Hohlrad 13 in Eingriff und ist durch den Träger 14 drehbar gestützt. Das Hohlrad 13 ist mit dem Ritzel 12 in Eingriff und dreht sich mittels der Welle 15 einstückig mit dem Rotor 4a des zweiten Motorgenerators 4 und dem Antriebszahnrad 17 der Synchronisationseinrichtung 16. Der Träger 14 stützt das Ritzel 12 drehbar und dreht sich durch die Drehung der Ritzel 12, die um das Äußere des Sonnerads 11 kreisen. Die Rotationsleistung von der Kraftmaschine 11 wird mittels der Kurbelwelle 5, der Drehmomentenübertragungsvorrichtung 2 und der Welle 6 auf den Träger 14 übertragen. In dem Planetengetriebemechanismus 10 hat das Übersetzungsverhältnis des Sonnenrads 11 und des Hohlrads 13 den Wert 1:λ (wobei 0 < λ < 1), wenn der Träger festgehalten ist.
-
Die Welle 15 ist eine Rotationswelle, die sich einstückig mit dem Hohlrad 13 des Planetengetriebes 10, dem Rotor 4a des zweiten Motorgenerators und dem Antriebszahnrad 17 der Synchronisierungseinrichtung 16 dreht. Die Drehzahl der Welle 15 entspricht jener des zweiten Motorgenerators 4 (MG2).
-
Die Synchronisierungseinrichtung 16 ist eine Vorrichtung, die die Drehzahl der Welle 15 und des Antriebszahnrads 20 oder der Welle 22 synchronisiert und kann wahlweise die Rotationsleistung der Welle 15 auf das Antriebszahnrad 20 oder die Welle 22 übertragen. Die Synchronisierungseinrichtung 16 hat ein Antriebszahnrad 17, eine Hülse 18, ein Abtriebszahnrad 19 und ein Abtriebszahnrad 21. Das Antriebszahnrad 17 dreht sich einstückig mit dem Hohlrad 13 des Planetengetriebemechanismus 10 und dem Rotor 4a des zweiten Motorgenerators 4 mittels der Welle 15. Die Hülse 18 ist ein zylindrisches Element, das wahlweise das Antriebszahnrad 17 und das Abtriebszahnrad 19 oder das Abtriebszahnrad 21 verbindet und das durch Empfang der Arbeit des Stellglieds 47 in der Achsrichtung gleitet. Die Hülse 18 hat eine Verzahnung, die um ihre Innenumfangsfläche herum ausgebildet ist, und in dem neutralen Zustand ist sie lediglich mit dem Antriebszahnrad 17 in Eingriff, jedoch kommt sie durch Gleiten zu der Seite des Abtriebszahnrads 19 mit dem Antriebszahnrad 17 und dem Abtriebszahnrad 19 in Eingriff und sie kommt durch Gleiten zu der Seite des Abtriebszahnrads 21 mit dem Antriebszahnrad 17 und dem Abtriebszahnrad 21 in Eingriff. Das Abtriebszahnrad 19 dreht sich einstückig mit dem Antriebszahnrad 20. Das Abtriebszahnrad 21 dreht sich mittels der Welle 22 einstückig mit dem Abtriebszahnrad 23.
-
Das Antriebszahnrad 20 ist ein Zahnrad, auf welches die Rotationsleistung der Welle 15 übertragen wird, wenn in der Synchronisierungseinrichtung 16 das Antriebszahnrad 17 und das Abtriebszahnrad 19 mittels der Hülse 18 gekoppelt sind. Das Abtriebszahnrad 20 ist mit dem Abtriebszahnrad 31 mit einem bestimmten Übersetzungsverhältnis (beispielsweise 1:3) in Eingriff. Wenn das Übersetzungsverhältnis zwischen dem Antriebszahnrad 20 und dem Abtriebszahnrad 31 den Wert 1:3 hat und sich das Antriebszahnrad 20 um 3 Umdrehungen in der Vorwärtsrichtung dreht, dann dreht sich die Welle 30 (S2) um eine Umdrehung in der Rückwärtsrichtung.
-
Die Welle 22 (S3) ist eine Rotationswelle, die sich einstückig mit dem Abtriebszahnrad 21 und dem Abtriebszahnrad 23 der Synchronisierungseinrichtung 16 dreht. Die Rotationsleistung der Welle 22 wird mittels des Differenzialgeräts 33 und der Wellen 34, 35 so auf die Räder 36, 37 übertragen, dass eine Differenzialbewegung möglich ist. Die Rotationsleistung der Welle 15 wird dann auf die Welle 22 übertragen, wenn in der Synchronisierungseinrichtung 16 das Antriebszahnrad 17 und das Abtriebszahnrad 21 mittels der Hülse 18 verbunden sind. Das Abtriebszahnrad 23 ist mit dem Antriebszahnrad 32 mit einem bestimmten Übersetzungsverhältnis (beispielsweise 2:1) in Eingriff. Wenn das Übersetzungsverhältnis zwischen dem Abtriebszahnrad 23 und dem Antriebszahnrad 32 den Wert 2:1 hat und sich die Welle 30 (S2) um zwei Umdrehungen in der Vorwärtsrichtung dreht, dann dreht sich die Welle 22 (S3) um eine Umdrehung in der Rückwärtsrichtung.
-
Die Welle 25 (S1) ist eine Rotationswelle, die sich einstückig mit dem Abtriebszahnrad 24 und dem Antriebszahnrad 27 der Synchronisierungseinrichtung 26 dreht. Das Abtriebszahnrad 24 ist mit dem Antriebszahnrad 8 mit einem bestimmten Übersetzungsverhältnis (beispielsweise 1:1) in Eingriff.
-
Die Synchronisierungseinrichtung 26 ist eine Vorrichtung, die die Drehzahl der Welle 25 (S1) und der Welle 30 (S2) synchronisiert und kann die Rotationsleistung der Welle 15 trennbar auf die Welle 30 (S2) übertragen. Die Synchronisierungseinrichtung 26 hat ein Antriebszahnrad 27, eine Hülse 28 und ein Abtriebszahnrad 29. Das Antriebszahnrad 27 dreht sich einstückig mit dem Abtriebszahnrad 24 mittels der Welle 25. Die Hülse 28 ist ein zylindrisches Element, das das Antriebszahnrad 27 und das Abtriebszahnrad 29 untrennbar verbindet und durch Aufnehmen der Arbeit des Stellglieds 48 gleitet sie in der Achsrichtung. Um die Innenumfangsfläche der Hülse 28 ist eine Verzahnung ausgebildet und in dem neutralen Zustand ist sie lediglich mit dem Antriebszahnrad 27 in Eingriff, jedoch kommt sie durch Gleiten zu der Seite des Abtriebszahnrads 29 mit dem Antriebszahnrad 27 und dem Abtriebszahnrad 29 in Eingriff. Das Abtriebszahnrad 29 dreht sich einstückig mit dem Abtriebszahnrad 31 und dem Abtriebszahnrad 32 mittels der Welle 30 (S2). In 1 wird die Synchronisierungseinrichtung 26 als ein Mittel zum trennbaren Übertragen der Leistung zwischen der Welle 25 (S1) und der Welle 30 (S2) verwendet, jedoch ist es anstelle der Synchronisierungseinrichtung 26 auch möglich, eine Kupplungsvorrichtung zu verwenden.
-
Die Welle 30 (S2) ist eine Rotationswelle, die sich einstückig mit dem Abtriebszahnrad 29, dem Abtriebszahnrad 31 und dem Antriebszahnrad 32 der Synchronisierungseinrichtung 32 dreht. Das Abtriebszahnrad 31 ist mit dem Antriebszahnrad 20 mit einem bestimmten Übersetzungsverhältnis (beispielsweise 3:1) in Eingriff. Das Antriebszahnrad 32 ist mit dem Abtriebszahnrad 23 mit einem bestimmten Übersetzungsverhältnis (beispielsweise 1:2) in Eingriff.
-
Die Kraftmaschinensteuervorrichtung 40 ist ein Computer (eine elektronische Steuervorrichtung), der den Betrieb der Kraftmaschine 1 steuert. Die Kraftmaschinensteuervorrichtung 40 ist so verbunden, dass sie in der Lage ist, eine Kommunikation mit den verschiedenen Stellgliedern (beispielsweise einem Indikatorstellglied, einem Zündvorrichtungsstellglied und dergleichen (die in der Figur nicht dargestellt sind)) und verschiedenen Sensoren (beispielsweise dem Beschleunigungsstartsensor, dem Schaltstellungssensor, dem Drehzahlsensor und dergleichen (die in der Figur nicht dargestellt sind)), welche im Inneren der Kraftmaschine 1 installiert sind, und mit der Hybridsteuervorrichtung 43 durchzuführen. Die Kraftmaschinensteuervorrichtung 40 führt eine Steuerung gemäß Steuersignalen von der Hybridsteuervorrichtung 43 und auf Grundlage eines bestimmten Programms (einschließlich einer Datenbasis, eines Kennfelds und dergleichen) durch.
-
Die Motorgeneratorsteuervorrichtung 41 ist ein Computer (eine elektronische Steuervorrichtung), die den Betrieb der Motorgeneratoren 3, 4 mittels der Inverter 44, 45 steuert. Die Motorgeneratorsteuervorrichtung 41 ist so angeschlossen, dass sie in der Lage ist, eine Kommunikation mit den Invertern 44, 45, verschiedenen Sensoren (beispielsweise einem Drehzahlsensor und dergleichen (die in den Figuren nicht dargestellt sind)) und der Hybridsteuervorrichtung 43 durchzuführen. Die Motorgeneratorsteuervorrichtung 41 führt eine Steuerung gemäß den Steuersignalen von der Hybridsteuervorrichtung 43 und auf Grundlage bestimmter Programme (einschließlich einer Datenbasis, eines Kennfelds und dergleichen) durch.
-
Die Getriebesteuervorrichtung 42 ist ein Computer (eine elektronische Steuervorrichtung), die den Betrieb der Synchronisierungseinrichtungen 16, 26 mittels der Stellglieder 47, 48 steuert. Die Getriebevorrichtung 42 ist so angeschlossen, dass sie in der Lage ist, eine Kommunikation mit den Stellgliedern 47, 48, verschiedenen Sensoren (beispielsweise dem Drehzahlsensor und dergleichen (die in den Figuren nicht dargestellt sind)) und der Hybridsteuervorrichtung 43 durchzuführen. Die Getriebesteuervorrichtung 42 führt eine Steuerungsverarbeitung gemäß den Steuersignalen von der Hybridsteuervorrichtung 43 und auf Grundlage bestimmter Programme (einschließlich einer Datenbasis, eines Kennfelds und dergleichen) durch.
-
Die Hybridsteuervorrichtung 43 ist ein Computer (eine elektronische Steuervorrichtung), die den Betrieb der Kraftmaschinensteuervorrichtung 40, der Motorgeneratorsteuervorrichtung 41 und der Getriebesteuervorrichtung 42 steuert. Die Hybridsteuervorrichtung 43 ist so angeschlossen, dass sie in der Lage ist, eine Kommunikation mit den verschiedenen Sensoren (beispielsweise dem Drehzahlsensor und dergleichen (die in der Figur nicht dargestellt sind)), der Kraftmaschinensteuervorrichtung 40, der Motorgeneratorsteuervorrichtung 41 und der Getriebesteuervorrichtung 42 durchzuführen. Die Hybridsteuervorrichtung 43 gibt Steuersignale zu der Kraftmaschinensteuervorrichtung 40, der Motorgeneratorsteuervorrichtung 41 und der Getriebesteuervorrichtung 42 gemäß einem bestimmten Zustand der Hybridsteuervorrichtung und auf Grundlage bestimmter Programme (einschließlich einer Datenbasis, eines Kennfelds und dergleichen) aus.
-
Die Inverter 44, 45 steuern den Betrieb (Antriebsbetrieb, Regenerationsbetrieb) der Motorgeneratoren 3, 4 gemäß einem Steuersignal von der Motorgeneratorsteuervorrichtung 41. Die elektrische Speichervorrichtung 46 ist eine Vorrichtung, die elektrische Leistung speichert (sammelt), beispielsweise können eine Sekundärbatterie oder ein Kondensator verwendet werden, die mit elektrischer Leistung geladen und entladen werden können. Die elektrische Speichervorrichtung 46 ist elektrisch an den Motorgeneratoren 3, 4 über die Inverter 44, 45 angeschlossen.
-
Das Stellglied 47 ist eine Vorrichtung, die die Hülse 18 der Synchronisierungseinrichtung 16 mittels eines (in der Figur nicht dargestellten) Gabelelements gemäß einem Steuersignal von der Getriebesteuervorrichtung 42 gleiten lässt. Das Stellglied 48 ist eine Vorrichtung, die die Hülse 28 der Synchronisierungseinrichtung 26 mittels eines (in der Figur nicht dargestellten) Gabelelements gemäß einem Steuersignal von der Getriebesteuervorrichtung 42 gleiten lässt.
-
Als Nächstes wird der Betrieb der Hybridantriebsvorrichtung von Beispiel 1 der vorliegenden Erfindung unter Verwendung der Zeichnungen erläutert. 2 ist ein schematisches Schaubild, das in dem Leistungsübertragungspfad in dem ersten Modus (Niedergeschwindigkeitsmodus) der Hybridantriebsvorrichtung von diesem Beispiel der vorliegenden Erfindung veranschaulicht ist. 3 ist ein kollinieares Diagramm, das sich auf die Drehzahl bezieht, die den Betriebszustand des ersten Modus (Niedergeschwindigkeitsmodus) der Hybridantriebsvorrichtung von diesem Beispiel der vorliegenden Erfindung angibt. 4 ist ein schematisches Schaubild, das den Leistungsübertragungspfad in dem zweiten Modus (Zwischengeschwindigkeitsmodus) der Hybridantriebsvorrichtung von diesem Beispiel der vorliegenden Erfindung veranschaulicht. 5 bezieht sich auf die Drehzahl, die den Betriebszustand beim Ändern von dem ersten Modus auf den zweiten Modus der Hybridantriebsvorrichtung von diesem Beispiel der vorliegenden Erfindung angibt. 6 ist ein schematisches Schaubild, das den Leistungsübertragungspfad eines dritten Modus (Hochgeschwindigkeitsmodus) der Hybridantriebsvorrichtung von Beispiel 1 der vorliegenden Erfindung veranschaulicht. 7 ist ein kollinearer Graph, der sich auf die Drehzahl bezieht, die den Betriebszustand beim Ändern von dem zweiten Modus auf den dritten Modus der Hybridantriebsvorrichtung von diesem Beispiel der vorliegenden Erfindung angibt.
-
In der Hybridantriebsvorrichtung gibt es als Ausgabemodi einen ersten Modus (siehe 2), in welchem die Rotationsleistung von dem zweiten Motorgenerator 4 (MG2) über die Welle 30 (S2) auf die Welle 22 (S3) übertragen wird, einen zweiten Modus (siehe 4), in welchem die Rotationsleistung von dem ersten Motorgenerator 3 (MG1) über die Welle 25 (S1) und die Welle 30 (S2) auf die Welle 22 (S3) übertragen wird, und einen dritten Modus (siehe 6), in welchem die Rotationsleistung von dem zweiten Motorgenerator 4 (MG2) direkt auf die Welle 22 (S3) übertragen wird.
-
Dabei wird in dem ersten Modus (siehe 2) die Regeneration durch den ersten Motorgenerator 3 (MG1) durchgeführt, der Antrieb wird durch den zweiten Motorgenerator 4 (MG2) durchgeführt, die Welle 15 und das Antriebszahnrad 20 sind in der Synchronisiereinrichtung 16 verbunden (gekoppelt) und die Welle 25 (S1) und die Welle 30 (S2) sind in der Synchronisierungseinrichtung 26 voneinander gelöst (getrennt). Daher wird die Rotationsleistung von dem zweiten Motorgenerator 4 (MG2) über die Welle 15 und die Synchronisierungseinrichtung 16 auf das Antriebszahnrad 20 übertragen, die Geschwindigkeit wird zwischen dem Antriebszahnrad 20 und dem Abtriebszahnrad 31 verringert (hier ist das Untersetzungsverhältnis 1/3) und die Leistung wird auf die Welle 30 (S2) übertragen, die Geschwindigkeit wird zwischen dem Antriebszahnrad 32 und dem Abtriebszahnrad 23 verringert (hier ist das Untersetzungsverhältnis 1/2) und die Leistung wird auf die Welle 22 (S3) übertragen und dann wird die Leistung über das Differenzialgerät 33 und die Wellen 34, 35 auf die Räder 36, 37 übertragen. Die Drehzahl der Welle 22 (S3) ist 1/6 der Drehzahl des zweiten Motorgenerators 4 (MG2).
-
In dem zweiten Modus (siehe 4) führt der erste Motorgenerator 3 (MG1) den Antrieb durch und der zweite Motorgenerator 4 (MG2) führt die Regeneration durch, und in der Synchronisierungseinrichtung 16 ist die Welle 15 von dem Antriebszahnrad 20 und der Welle 22 (S3) gelöst (getrennt) und in der Synchronisierungseinrichtung 26 sind die Welle 25 (S1) und die Welle (S2) verbunden. Daher wird die Rotationsleistung von dem ersten Motorgenerator 3 (MG1) von der Welle 7 auf die Welle 25 (S1) übertragen, ohne dass die Geschwindigkeit zwischen dem Antriebszahnrad 8 und dem Abtriebszahnrad 24 verringert wird (hier ist das Untersetzungsverhältnis 1/1), wird über die Synchronisierungseinrichtung 26 auf die Welle 30 (S2) übertragen, wird auf die Welle 22 (S3) übertragen, wobei die Geschwindigkeit zwischen dem Antriebszahnrad 32 und dem Abtriebszahnrad 23 verringert wird (hier beträgt das Untersetzungsverhältnis 1/2), und wird über das Differenzialgerät 33 und die Wellen 34 und 35 auf die Räder 36, 37 übertragen. Die Drehzahl (upm) der Welle 22 (S3) ist 1/2 der Drehzahl des ersten Motorgenerators 3 (MG1).
-
In dem dritten Modus (siehe 6) führt der erste Motorgenerator 3 (MG1) die Regeneration durch und der zweite Motorgenerator 4 (MG2) führt den Antrieb durch, in der Synchronisierungseinrichtung 16 sind die Welle 15 und die Welle 22 (S3) gekoppelt (verbunden) und in der Synchronisierungseinrichtung 26 sind die Welle 25 (S1) und die Welle 30 (S2) gelöst (getrennt). Daher wird die Rotationsleistung des zweiten Motorgenerators 4 (MG2) über die Welle 7 und die Synchronisierungseinrichtung 16 auf die Welle 22 (S3) übertragen, ohne verringert zu werden, und wird über das Differenzialgerät 33 und die Wellen 34, 35 auf die Räder 36, 37 übertragen. Die Drehzahl der Welle 22 (S3) ist gleich wie die Drehzahl des zweiten Motorgenerators 4 (MG2).
-
Daher wird während der niedrigen Geschwindigkeit, wenn ein vergleichsweise großer Betrag des Antriebsdrehmoments erforderlich ist, der erste Modus (siehe 2; Untersetzungsverhältnis 1/6), der der Modus von den drei Ausgabemodi mit einem großen Untersetzungsverhältnis ist, ausgewählt und verwendet; während der hohen Geschwindigkeit, wenn Beschleunigung erforderlich ist, wird der dritte Modus (siehe 6; Untersetzungsverhältnis 1/1), welcher der Modus von den drei Ausgabemodi mit dem kleinsten Untersetzungsverhältnis ist, ausgewählt und verwendet, und während der Zwischengeschwindigkeit, die zwischen diesen Geschwindigkeiten liegt, wird der zweite Modus (siehe 4; Untersetzungsverhältnis 1/2), welcher der Modus von den drei Ausgabemodi ist, der ein zwischenliegendes Untersetzungsverhältnis hat, ausgewählt und verwendet.
-
In jedem Modus wird eine kontinuierliche Drehzahlvariation durchgeführt, jedoch befindet sich die Kraftmaschine 1 in dem ersten Modus (siehe 2) während des anfänglichen Betriebs in einem Beschleunigungszustand und es ist für die Drehzahl des ersten Motorgenerators 3 (MG1) leichter anzusteigen, als für die Drehzahl des zweiten Motorgenerators 4 (MG2) (siehe 3), sodass es möglich ist, das Fahrzeug effizient beschleunigen zu lassen, indem der erste Motorgenerator 3 (MG1) die Regeneration durchführt und der zweite Motorgenerator den Antrieb durchführt. Beim Beschleunigen in dem ersten Modus (siehe 2) wird die Drehzahl des zweiten Motorgenerators 4 (MG2) höher als die Drehzahl des ersten Motorgenerators 3 (MG1) und die Drehzahl der Welle 25 (S1) erreicht den Punkt, an dem sie mit der Drehzahl der Welle 30 (S2) übereinstimmt (siehe 5). Wenn dies passiert, dann wird zum Zwecke des Umschaltens von dem ersten Modus (siehe 2) auf den zweiten Modus (siehe 4), der erste Motorgenerator 3 (MG1) von dem Regenerationsvorgang auf den Antriebsvorgang umgeschaltet, der zweite Motorgenerator (MG2) wird von dem Antriebsvorgang auf den Regenerationsvorgang umgeschaltet, die Synchronisierungseinrichtung 16 wird von einem Zustand, in dem die Welle 15 und das Antriebszahnrad 20 miteinander verbunden sind, auf einen Zustand umgeschaltet, in dem die Welle 15 und das Antriebszahnrad 20 und die Welle 22 (S3) gelöst sind, und die Synchronisierungseinrichtung 26 wird von einem Zustand, in dem die Welle 25 (S1) und die Welle 30 (S2) gelöst sind, auf einen Zustand umgeschaltet, in dem sie verbunden sind. Diese Art des Umschaltens wird durch die elektronischen Steuervorrichtungen (40 bis 43 in 1) durchgeführt und durch Überwachen der Drehzahl sowohl der Kraftmaschine 1 als auch der Welle 22 (S3) ist es möglich, den Punkt zu erfassen, an dem der Modus von dem ersten Modus (siehe 2) auf den zweiten Modus (siehe 4) umzuschalten ist.
-
In dem zweiten Modus (siehe 4) befindet sich die Kraftmaschine unmittelbar nach dem Umschalten von dem ersten Modus (siehe 2) auf den zweiten Modus (siehe 4) in einem Beschleunigungszustand und die Drehzahl des ersten Motorgenerators 3 (MG1) ist niedriger als die Drehzahl des zweiten Motorgenerators 4 (MG2) (siehe 5), sodass es möglich ist, dass das Fahrzeug effizient beschleunigt, indem der erste Motorgenerator 3 (MG1) den Antriebsvorgang durchführt und der zweite Motorgenerator 4 (MG2) den Regenerationsvorgang durchführt. Wenn das Fahrzeug in dem zweiten Modus (siehe 4) beschleunigt, dann wird die Drehzahl des ersten Motorgenerators 3 (MG1) größer als die Drehzahl des zweiten Motorgenerators 4 (MG2) und die Drehzahl des zweiten Motorgenerators 4 (MG2) erreicht den Punkt, an dem sie mit der Drehzahl der Welle 30 (S2) übereinstimmt (siehe 7). Wenn dies eintritt, dann wird der erste Motorgenerator 3 (MG1) zum Zwecke des Umschaltens von dem zweiten Modus (siehe 4) auf den dritten Modus (siehe 6) von dem Antriebsvorgang auf den Regenerationsvorgang umgeschaltet, der zweite Motorgenerator 4 (MG2) wird von dem Regenerationsvorgang auf den Antriebsvorgang umgeschaltet, die Synchronisierungseinrichtung 16 wird von einem Zustand, in dem die Welle 15 und das Antriebszahnrad 20 und die Welle 22 (S3) gelöst sind, auf einen Zustand umgeschaltet, in dem die Welle 15 und die Welle 22 (S3) verbunden sind, und die Synchronisierungseinrichtung 26 wird von einem Zustand, in dem die Welle 25 (S2) und die Welle 30 (S2) verbunden sind, auf einen Zustand umgeschaltet, in dem sie gelöst sind. Diese Art des Umschaltens wird durch die elektronische Steuervorrichtungen (40 bis 43 in 1) durchgeführt und durch Überwachen der Drehzahl sowohl der Kraftmaschine 1 als auch der Welle 22 (S3) ist es möglich, den Punkt zu erfassen, an dem der Modus von dem zweiten Modus (siehe 4) auf den dritten Modus (siehe 6) umzuschalten ist.
-
In dem dritten Modus (siehe 6) befindet sich die Kraftmaschine 1 unmittelbar nach dem Umschalten des Modus von dem zweiten Modus (siehe 4) auf den dritten Modus (siehe 6) in dem Beschleunigungszustand und die Drehzahl des zweiten Motorgenerators 4 (MG2) ist niedriger als die Drehzahl des ersten Motorgenerators 3 (MG1) (siehe 7), sodass es möglich ist, das Fahrzeug effizient beschleunigen zu lassen, indem der erste Motorgenerator 3 (MG1) den Regenerationsvorgang durchführt und der zweite Motorgenerator 4 (MG2) den Antriebsvorgang durchführt.
-
Mit diesem Beispiel ist es möglich, den Bereich des Untersetzungsverhältnisses aufzuweiten, ohne dass der sogenannte Leistungszirkulationszustand auftritt, in dem der erste Motorgenerator 3 (MG1) in einem umgekehrten Rotationsleistungszustand arbeitet und der zweite Motorgenerator in einem erzwungenen Regenerationszustand arbeitet, sodass es für die Brennkraftmaschine möglich ist, in einem optimalen Kraftstoffverbrauchszustand zu arbeiten, und sodass es möglich ist, die Leistungsübertragungseffizienz und den Kraftstoffverbrauch zu verbessern. Außerdem gibt es in einer Hybridantriebsvorrichtung lediglich einen Planetengetriebemechanismus, sodass die gesamte Länge des Getriebes kurz wird, und es somit möglich ist, die Montagefähigkeit im Fahrzeug zu verbessern. Außerdem ist es beim Beschleunigungsvorgang eines Fahrzeugs möglich, die Modi problemlos umzuschalten, ohne die Drehzahl der Kraftmaschine 1 zu senken, sodass der Gangwechsel keine Zeit benötigt und es möglich ist, den Gangwechsel während der Beschleunigung der Kraftmaschine 1 ohne Auftreten eines Getriebestoßes durchzuführen.
-
Die beispielhaften Ausführungsbeispiele oder Beispiele der Erfindung können innerhalb des Rahmens der Gesamtoffenbarung der vorliegenden Erfindung (einschließlich der Ansprüche und der Zeichnungen) und auf Grundlage des grundlegenden technischen Umfangs der Erfindung modifiziert und geändert werden. Es sind verschiedene Kombinationen oder Auswahlen der verschiedenen Elemente der Erfindung innerhalb des Bereichs der Patentansprüche der Erfindung möglich. D. h., die vorliegende Erfindung beinhaltet zudem verschiedene Änderungen und Modifikationen, die durch den Fachmann gemäß der Gesamtoffenbarung einschließlich der Patentansprüche erhalten werden können und die in dem technischen Umfang der Erfindung liegen.
-
Bezugszeichenliste
-
- 1
- Kraftmaschine (ENG, Brennkraftmaschine)
- 2
- Drehmomentenwandler
- 3
- Erster Motorgenerator (MG1)
- 3a
- Rotor
- 3b
- Stator
- 4
- Zweiter Motorgenerator (MG2)
- 4a
- Rotor
- 4b
- Stator
- 5
- Kurbelwelle
- 6, 7
- Welle
- 8
- Antriebszahnrad
- 10
- Planetengetriebemechanismus (Getriebemechanismus)
- 11
- Sonnenrad
- 12
- Ritzel
- 13
- Hohlrad
- 14
- Träger
- 15
- Welle
- 16
- Synchronisierungseinrichtung (erster Leistungsübertragungsschaltmechanismus)
- 17
- Antriebszahnrad
- 18
- Hülse
- 19
- Abtriebszahnrad
- 20
- Antriebszahnrad (Rotationselement)
- 21
- Abtriebszahnrad
- 22
- Welle (S3, dritte Welle)
- 23
- Abtriebszahnrad
- 24
- Abtriebszahnrad
- 25
- Welle (S1, erste Welle)
- 26
- Synchronisierungseinrichtung (zweiter Leistungsübertragungsschaltmechanismus)
- 27
- Antriebszahnrad
- 28
- Hülse
- 29
- Abtriebszahnrad
- 30
- Welle (S2, zweite Welle)
- 31
- Abtriebszahnrad
- 32
- Antriebszahnrad
- 33
- Differenzialgerät
- 34, 35
- Welle
- 36, 37
- Rad
- 40
- Kraftmaschinensteuervorrichtung
- 41
- Motorgeneratorsteuervorrichtung (elektronische Steuervorrichtung)
- 42
- Getriebesteuervorrichtung (elektronische Steuervorrichtung)
- 43
- Hybridsteuervorrichtung (elektronische Steuervorrichtung)
- 44, 45
- Inverter
- 46
- Elektrische Speichervorrichtung
- 47, 48
- Stellglied
-
ZITATE ENTHALTEN IN DER BESCHREIBUNG
-
Diese Liste der vom Anmelder aufgeführten Dokumente wurde automatisiert erzeugt und ist ausschließlich zur besseren Information des Lesers aufgenommen. Die Liste ist nicht Bestandteil der deutschen Patent- bzw. Gebrauchsmusteranmeldung. Das DPMA übernimmt keinerlei Haftung für etwaige Fehler oder Auslassungen.
-
Zitierte Patentliteratur
-