-
Die vorliegende Erfindung betrifft einen Generator, der für einen Nabendynamo usw. eines Fahrrads verwendet wird.
-
Bei einem Fahrrad-Nabendynamo dreht sich ein Läufer mit etwa derselben Geschwindigkeit wie das Rad, so dass die Drehzahl des Läufers im Vergleich zum Seitenläuferdynamo tendenziell niedriger wird und die induzierte elektromotorische Kraft während des Langsamfahrens tendenziell unzureichend wird. Daher ist ein günstiger Nabendynamo zur Verwendung einer, mit dem eine Hochfrequenz-Wechselstromleistung erhalten werden kann, selbst wenn die Drehzahl des Läufers niedrig ist.
-
Beispielsweise schlägt die japanische Offenlegungsschrift
JP 2007-49839 A einen Klauenpolgenerator vor. Dieser Generator weist einen Ständer und einen Läufer auf, der an der Außenseite des Ständers angeordnet ist. Der Läufer weist mehrere Magnete auf, die in Umfangsrichtung nebeneinander angeordnet sind; wobei die Magnete so ausgebildet sind, dass die Magnetpole, die dem Ständer gegenüberliegen, in Umfangsrichtung abwechselnd verschiedene Magnetpole sein werden. Der Ständer weist zwei Ständerblechpakete auf, die an beiden Achsseiten angeordnet sind. Jedes Ständerblechpaket weist mehrere Klauenabschnitte auf, die sich unter gegenseitiger Annäherung zu einer Seite hin erstrecken, und die Klauenabschnitte der separaten Ständerblechpakete sind so vorgesehen, dass sie abwechselnd in Umfangsrichtung angeordnet sind. Die Klauenabschnitte jedes Ständerblechpakets sind radial innerhalb jedes Magneten angeordnet und werden so angeregt, dass von dem Magneten Polaritäten erzeugt werden, die in Umfangsrichtung abwechselnd verschieden sind. Eine Ankerspule ist an dem Ständer an einer Stelle angeordnet, die der Magnetfluss mittels der Klauenabschnitte jedes Ständerblechpakets passiert.
-
Bei diesem Generator verändert sich die Relativlage des Magneten bezogen auf die Klauenabschnitte jedes Ständerblechpakets aufgrund der Drehung des Läufers, und durch die Polarität jedes Klauenabschnitts, die zusammen mit dem obigen umgeschaltet wird, wird die Richtung des Hauptmagnetflusses, der sich über die Ankerspule verkettet, umgekehrt, und es wird eine induzierte elektromotorische Kraft in der Ankerspule erzeugt. Da die zu diesem Zeitpunkt erhaltene Wechselstromleistung eine Frequenz in einer Größenordnung haben wird, die proportional zu der Anzahl der Pole der Magnete ist, wird leicht eine Hochfrequenz-Wechselstromleistung erhalten, die der Anzahl der Pole der Magnete entspricht.
-
-
In den vergangenen Jahren war zur Verbesserung des Designs von Fahrrädern eine Verringerung des Außendurchmessers der Nabe erforderlich, und so war eine Verringerung des Außendurchmessers des Nabendynamos erforderlich. Ein Klauenpolgenerator ist so ausgebildet, dass die Klauenabschnitte jedes Ständerblechpakets, die mit verschiedenen Polaritäten angeregt werden, in Umfangsrichtung abwechselnd angeordnet sind. Daher wird, da der Außendurchmesser des Nabendynamos kleiner wird, der Abstand zwischen benachbarten Klauenabschnitten zu klein. Im Ergebnis wird leicht ein Magnetfluss zwischen den Klauenabschnitten geleitet, die mit verschiedenen Polaritäten angeregt wurden, und der magnetische Streufluss, der sich nicht über die Ankerspule verkettet, wird leicht erhöht. Daher besteht bei einem Klauenpolgenerator das Problem, dass sich der magnetische Streufluss bei einer Verringerung des Außendurchmessers erhöht und nur schwer eine ausreichende induzierte elektromotorische Kraft erhalten werden kann.
-
Die vorliegende Erfindung entstand im Hinblick auf ein solches Problem, und ihre Aufgabe ist die Bereitstellung eines Generators, mit dem leicht die Hochfrequenz-Wechselstromleistung erhalten wird, selbst wenn die Drehzahl des Läufers niedrig ist, und dessen Außendurchmesser geeignet verringert werden kann.
-
Die Lösung der Aufgabe gelingt mit einem Generator gemäß Anspruch 1. Vorteilhafte Weiterbildungen sind in den abhängigen Ansprüchen beschrieben.
-
Der Generator gemäß einer Ausführungsform der vorliegenden Erfindung weist einen Läufer und einen Ständer auf. Der Ständer weist mehrere Magnete, ein Ständerblechpaket und eine Ankerspule auf. Die Magnete sind in Abständen in Umfangsrichtung so angeordnet, dass die Magnetpole, die sich in Umfangsrichtung gegenüberliegen, dieselbe Polarität haben. Das Ständerblechpaket weist Spulennutabschnitte auf, die an umfänglich gegenüberliegenden Seiten der Magnete angeordnet sind. Die Ankerspule ist zwischen den Spulennutabschnitten gewickelt, so dass die Magnete in Umfangsrichtung überspreizt werden. Der Läufer weist ein Läuferblechpaket auf, das mehrere Schenkelpolläuferabschnitte aufweist, die in Abständen in Umfangsrichtung ausgebildet sind. Das Ständerblechpaket weist einen ersten Schenkelpolständerabschnitt, der an einem ersten Kraftlinienwegabschnitt vorgesehen ist, der sich neben den Spulennutabschnitten in einer der Umfangsrichtungen befindet, und einen zweiten Schenkelpolständerabschnitt, der an einem zweiten Kraftlinienwegabschnitt vorgesehen ist, der sich neben den Spulennutabschnitten in der anderen Umfangsrichtung befindet, auf, wobei der erste und der zweite Schenkelpolständerabschnitt dem Läufer gegenüberliegen. Der erste Schenkelpolständerabschnitt steht von dem ersten Kraftlinienwegabschnitt in Richtung der radial äußeren Seite ab und der zweite Schenkelpolständerabschnitt steht von dem zweiten Kraftlinienwegabschnitt in Richtung der radial äußeren Seite ab, welche die Seite gegenüber dem Läufer ist. Wenigstens zwei erste Schenkelpolständerabschnitte sind pro einem ersten Kraftlinienwegabschnitt vorgesehen und wenigstens zwei zweite Schenkelpolständerabschnitte sind pro einem zweiten Kraftlinienwegabschnitt vorgesehen.
-
Gemäß der vorliegenden Erfindung kann ein Generator erhalten werden, mit dem leicht die Hochfrequenz-Wechselstromleistung erhalten werden kann, selbst wenn die Drehzahl des Läufers niedrig ist, und dessen Außendurchmesser geeignet verringert werden kann.
-
Nunmehr werden nachstehend spezielle Ausführungsformen der Erfindung beispielhaft unter Bezugnahme auf die beigefügten Zeichnungen beschrieben, wobei:
- 1 eine Teilseitenansicht ist, die ein Fahrrad zeigt, das mit dem Fahrrad-Generator gemäß der ersten Ausführungsform ausgestattet ist;
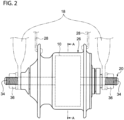
- 2 eine Vorderansicht ist, die die Ausgestaltung der Fahrradnabe und ihrer Umgebung gemäß der ersten Ausführungsform zeigt;
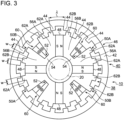
- 3 eine Querschnittsansicht des Fahrrad-Generators gemäß der ersten Ausführungsform ist;
- 4 eine Querschnittsansicht ist, die eine Ankerspule des Fahrrad-Generators gemäß der ersten Ausführungsform zeigt;
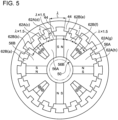
- 5 eine Ansicht ist, die die Lagebeziehung des Schenkelpolläuferabschnitts und des Schenkelpolständerabschnitts gemäß der ersten Ausführungsform zeigt;
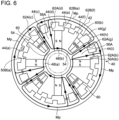
- 6 eine Ansicht ist, die einen Zustand zeigt, in dem der Phasenwinkel des Generators gemäß der ersten Ausführungsform null ist;
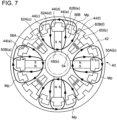
- 7 eine Ansicht ist, die einen Zustand zeigt, in dem der Phasenwinkel des Generators gemäß der ersten Ausführungsform π/2 ist;
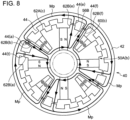
- 8 eine Ansicht ist, die einen Zustand zeigt, in dem der Phasenwinkel des Generators gemäß der ersten Ausführungsform π ist;
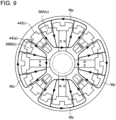
- 9 eine Ansicht ist, die einen Zustand zeigt, in dem der Phasenwinkel des Generators gemäß der ersten Ausführungsform 3π/2 ist;
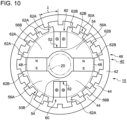
- 10 eine Querschnittsansicht des Generators gemäß der zweiten Ausführungsform ist;
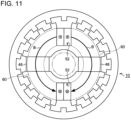
- 11 eine Querschnittsansicht ist, die eine Ankerspule des Fahrrad-Generators gemäß der zweiten Ausführungsform zeigt;
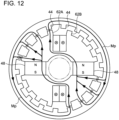
- 12 eine Ansicht ist, die einen Zustand zeigt, in dem der Phasenwinkel des Generators gemäß der zweiten Ausführungsform null ist;
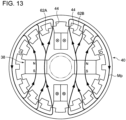
- 13 eine Ansicht ist, die einen Zustand zeigt, in dem der Phasenwinkel des Generators gemäß der zweiten Ausführungsform π/2 ist;
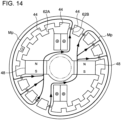
- 14 eine Ansicht ist, die einen Zustand zeigt, in dem der Phasenwinkel des Generators gemäß der zweiten Ausführungsform π ist; und
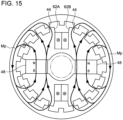
- 15 eine Ansicht ist, die einen Zustand zeigt, in dem der Phasenwinkel des Generators gemäß der zweiten Ausführungsform 3π/2 ist.
-
In der Beschreibung jeder der folgenden Ausführungsformen sind denselben Aufbauelementen dieselben Bezugszeichen gegeben worden, und überschneidende Beschreibungen wurden weggelassen. Ferner wurde zur Vereinfachung der Beschreibung, wenn geeignet, in jeder Zeichnung ein Teil der Aufbauelemente weggelassen.
-
1 ist eine Teilseitenansicht, die ein Fahrrad 12 zeigt, das mit dem Fahrrad-Generator 10 (nachstehend einfach als der Generator 10 bezeichnet) gemäß der ersten Ausführungsform ausgestattet ist. Das Fahrrad 12 weist eine Vorderradgabel 18, die drehbar am Lenkkopf 16 des Hauptrahmens 14 gelagert ist, und eine Nabenwelle 20, die an der Vorderradgabel 18 befestigt ist, auf. Das Vorderrad 22 als ein Rad ist drehbar an der Nabenwelle 20 gelagert. Ein Scheinwerfer 24 ist auf der Seite des Vorderrades 22 montiert, und diesem wird die von dem Generator 10 erhaltene Energie zugeführt.
-
Das Vorderrad 22 weist ferner eine röhrenförmige Nabe 26, die über ein Achslager (nicht gezeigt) drehbar an der Nabenwelle 20 gelagert ist, mehrere Speichen 28, die am Außenumfangsteil der Nabe 26 befestigt sind, und eine Felge 30, die am Außenumfangsteil jeder Speiche 28 befestigt ist, auf. Ein Reifen 32 ist an der Felge 30 befestigt.
-
2 ist eine Vorderansicht, die die Ausgestaltung der Nabe 26 des Fahrrads 12 und ihre Umgebung zeigt. Andere Ausgestaltungen der Nabe 26 sind durch die Strichzweipunktlinie aufgezeigt. Ein Generator 10, der als ein Nabendynamo agiert, ist in der Nabe 26 untergebracht. Eine Schraube 34 ist an beiden Enden der Nabenwelle 20 in axialer Richtung ausgebildet. Die Nabenwelle 20 wird an der Vorderradgabel 18 zusammen mit der Nabe 26 durch Anziehen einer Mutter 36, die auf die jeweiligen Schrauben 34 geschraubt ist, fixiert.
-
3 ist eine Querschnittsansicht des Generators 10. Diese Zeichnung ist eine Querschnittsansicht, die senkrecht zur axialen Richtung des Drehzentrums eines nachstehend beschriebenen Läufers 40 und ein Schnitt an der Linie A-A von 2 ist. Die Nabe 26 wurde in der vorliegenden Zeichnung weggelassen. Überdies werden in der folgenden Beschreibung die Ausdrücke „axiale Richtung“, „Umfangsrichtung“ und „radiale Richtung“ zur Beschreibung der Lagebeziehungen der Aufbauelemente des Ständers 38 und des Läufers 40, wie nachstehend beschrieben, verwendet. Von den obigen ist unter „axiale Richtung“ die axiale Richtung des Drehzentrums des Läufers 40 zu verstehen, und unter „Umfangsrichtung“ und „radiale Richtung“ sind die Umfangsrichtung bzw. die radiale Richtung bezogen auf das Drehzentrum des Läufers 40 zu verstehen.
-
Der Generator 10 weist einen Ständer 38, der an der Nabenwelle 20 fixiert ist, und einen Läufer 40, der drehbar an der Nabenwelle 20 gelagert ist, auf. Der Generator 10 ist ein Außenläufer-Generator, bei dem der Läufer 40 an der Außenumfangsseite des Ständers 38 angeordnet ist. Ferner ist der Generator 10 ein Synchrongenerator. Der Läufer 40 ist drehbar integral mit der Nabe 26 vorgesehen, die ein Teil des Vorderrades 22 ist. Beim Drehen des Vorderrades 22 dreht sich der Läufer 40 mit.
-
Insgesamt ist der Läufer 40 ringförmig ausgebildet. Der Läufer 40 weist ein Läuferblechpaket 46 auf, das einen ringförmigen Grundkörper 42 und mehrere Schenkelpolläuferabschnitte 44 aufweist, die an der Innenumfangsseite des ringförmigen Grundkörpers 42 vorgesehen sind, welche die Seite ist, die dem Ständer 38 des ringförmigen Grundkörpers 42 gegenüber liegt.
-
Jeder Schenkelpolläuferabschnitt 44 steht von dem ringförmigen Grundkörper 42 in Richtung der radial inneren Seite, welche die Seite ist, die dem Ständer 38 gegenüber liegt, ab. Jeder Schenkelpolläuferabschnitt 44 ist so ausgebildet, dass er eine der vorgegebenen Breite w entsprechende Breite aufweist. Hier umfasst „entsprechend“ exakt denselben Fall und den im Wesentlichen selben Fall. Die Auslegung von „entsprechend“ wird nachstehend dieselbe sein.
-
Die Schenkelpolläuferabschnitte 44 sind in Abständen an Stellen angeordnet, die jeweils in Umfangsrichtung um einen einem vorgegebenen Winkel λ entsprechenden Winkel (nachstehend auch als die Schenkelpolteilung bezeichnet) verschoben sind. In der vorliegenden Ausführungsform sind insgesamt 20 Schenkelpolläuferabschnitte 44 vorgesehen, wobei die Schenkelpolteilung λ mit 18° (= 360°/20) festgelegt ist. Diese Schenkelpolteilung λ entspricht dem Phasenwinkel 2π des Generators 10; wird der Läufer 40 um die Schenkelpolteilung λ gedreht, wird von der Ankerspule 60 eine Wechselstromleistung erzeugt, die einen Zyklus ausmacht, wie nachstehend beschrieben.
-
Insgesamt ist der Ständer 38 ringförmig ausgebildet. Der Ständer 38 weist mehrere Magnete 48, die in Abständen in Umfangsrichtung angeordnet sind, und mehrere Ständerblechpakete 50A und 50B, von denen eines für jeden Abstand zwischen den mehreren Magneten 48 angeordnet ist, auf. Die mehreren Magnete 48 und die mehreren Ständerblechpakete 50A und 50B sind abwechselnd in Umfangsrichtung angeordnet und bilden durch Verbinden mittels eines Haftmittels oder dergleichen eine Ringform. In der vorliegenden Ausführungsform sind insgesamt jeweils vier, d. h. eine gerade Zahl, der Magnete 48 und Ständerblechpakete 50A und 50B vorgesehen.
-
Der Magnet 48 ist ein Dauermagnet. Der Magnet 48 wird im Magnetfeld der nachstehend beschriebenen Ankerspule 60 eingesetzt. Die Umfangsrichtung des Magneten 48 ist die Magnetisierungsrichtung. Die Magnete 48 sind in Abständen an Stellen angeordnet, die in Umfangsrichtung um entsprechende Winkel verschoben sind. Die Magnetpole, die in der Umfangsrichtung der mehreren Magnete 48, die in Umfangsrichtung nebeneinander liegen, entgegengesetzt sind, haben dieselbe Polarität. Die Magnete 48 sind plattenförmig und verlaufen entlang der radialen Richtung, so dass sie in radialer Richtung die Ständerblechpakete 50A und 50B, die in Umfangsrichtung nebeneinander liege, teilen.
-
Die Ständerblechpakete 50A und 50B und das oben beschriebene Läuferblechpaket 46 werden durch Schichten mehrerer Metallplatten in der axialen Richtung des Läufers 40 gebildet. Das Material der Metallplatten wird aus einem weichmagnetischen Körper wie einem elektromagnetischen Stahlblech sein.
-
Die Ständerblechpakete 50A und 50B weisen ein erstes Ständerblechpaket 50A, das sich neben einem von den anderen Magneten 48 befindet, die in Umfangsrichtung (in der Zeichnung beispielsweise dem Magneten 48 auf der Oberseite) in einer der Umfangsrichtungen (in der Zeichnung im Uhrzeigersinn) angeordnet sind, und ein zweites Ständerblechpaket 50B, das sich neben dem einen Magneten 48 in der anderen Umfangsrichtung (in der Zeichnung gegen den Uhrzeigersinn) befindet, auf. In der vorliegenden Ausführungsform sind zwei erste Ständerblechpakete 50A und zwei zweite Ständerblechpakete 50B vorgesehen.
-
Jedes der Ständerblechpakete 50A und 50B weist die Spulennutabschnitte 52 auf, die an den umfänglich gegenüberliegenden Seiten der anderen Magnete 48 angeordnet sind, die in Umfangsrichtung angeordnet sind. Ein Spulennutabschnitt 52 wird für jeden Abstand zwischen den mehreren Magneten 48 angeordnet sein. Ein Spulennutabschnitt 52 ist für jedes der ersten Ständerblechpakete 50A und jedes der zweiten Ständerblechpakete 50B ausgebildet. Der Spulennutabschnitt 52 ist so ausgebildet, dass er gegenüber der radial äußeren Seite ausgehend von der Seite gegenüber dem Läufer 40 radial nach innen ausgespart ist.
-
Neben dem Spulennutabschnitt 52 weist jedes der Ständerblechpakete 50A und 50B einen bogenförmigen Kraftlinienweg-Verbindungsabschnitt 54, der sich neben dem Spulennutabschnitt 52 auf der Unterseite befindet, und die Kraftlinienwegabschnitte 56A und 56B, die sich neben dem Spulennutabschnitt 52 an den umfänglich gegenüberliegenden Seiten befinden, auf. Der Kraftlinienweg-Verbindungsabschnitt 54 verbindet die Kraftlinienwegabschnitte 56A und 56B in Umfangsrichtung. Die Kraftlinienwegabschnitte 56A und 56B verlaufen zur radial äußeren Seite, welche die Seite ist, die dem Läufer 40 gegenüberliegt. Die Kraftlinienwegabschnitte 56A und 56B weisen einen ersten Kraftlinienwegabschnitt 56A, der sich neben dem Spulennutabschnitt 52 in einer Umfangsrichtung (in der Zeichnung im Uhrzeigersinn) befindet, und einen zweiten Kraftlinienwegabschnitt 56B, der sich neben der anderen Umfangsrichtung (in der Zeichnung gegen den Uhrzeigersinn) befindet, auf.
-
4 ist eine Querschnittsansicht, die eine Ankerspule 60 des Generators 10 zeigt. Die Zeichnung zeigt ebenso die Wickelrichtung B der Ankerspule 60 in einer der axialen Richtungen des Läufers 40 (die Nahseite des Blechs). Der Ständer 38 weist ferner die Ankerspulen 60 auf, die zwischen den Spulennutabschnitten 52, die sich neben jedem der Magnete 48 an umfänglich gegenüberliegenden Seiten befinden, gewickelt sind, so dass sie die Magnete 48 in Umfangsrichtung überspreizen. Die Ankerspulen 60 sind entsprechend jedem der mehreren Magnete 48 vorgesehen, und es ist dieselbe Anzahl dieser wie die Anzahl an Magneten 48 vorgesehen. Die Ankerspulen 60 sind so gewickelt, dass sie die entsprechenden Magnete 48 von den umfänglich gegenüberliegenden Seiten und beiden axialen Seiten umgeben.
-
Die Ankerspule 60 ist mittels einer konzentrierten Wicklung zwischen den Spulennutabschnitten 52, die in Umfangsrichtung nebeneinander liegen, gewickelt, kann aber auch mittels einer verteilten Wicklung gewickelt sein, so dass sie durch die anderen Spulennutabschnitte 52 hindurchführt. Die Ankerspulen 60, die in Umfangsrichtung nebeneinander liegen, sind in die entgegengesetzte Wickelrichtung B gewickelt, können aber auch in dieselbe Richtung gewickelt sein.
-
Wie nachstehend beschrieben, wird, wenn sich der Läufer 40 dreht, die Wechselstromleistung mit derselben Phase in der Ankerspule 60 erzeugt. Die Ankerspulen 60 sind elektrisch parallel geschaltet, und die Ausgangsklemmen sind an eine Gleichrichterschaltung, die nicht gezeigt ist, angeschlossen, und es wird eine Einphasen-Wechselstromleistung an die Gleichrichterschaltung ausgegeben. Die Gleichrichterschaltung wandelt die Wechselstromleistung durch Gleichrichten, Glätten usw. in Gleichstromleistung um und führt die Gleichstromleistung dem Scheinwerfer 24 (bezogen auf 1) als die externe elektrische Vorrichtung zu. Die Ankerspulen 60 können aber auch elektrisch in Reihe geschaltet sein.
-
Hier, wie in 3 gezeigt, weist der Ständer 38 einen ersten Schenkelpolständerabschnitt 62A, der an jedem von mehreren ersten Kraftlinienwegabschnitten 56A gegenüber dem Läufer 40 vorgesehen ist, und einen zweiten Schenkelpolständerabschnitt 62B, der an jedem der mehreren zweiten Kraftlinienwegabschnitte 56B gegenüber dem Läufer 40 vorgesehen ist, auf. Jeder der Schenkelpolständerabschnitte 62A und 62B steht von jedem der Kraftlinienwegabschnitte 56A und 56B in Richtung der radial äußeren Seite ab, welche die Seite gegenüber dem Läufer 40 ist. Zwei erste Schenkelpolständerabschnitte 62A sind pro einem ersten Kraftlinienwegabschnitt 56A vorgesehen, und zwei zweite Schenkelpolständerabschnitte 62B sind pro einem zweiten Kraftlinienwegabschnitt 56B vorgesehen. In der vorliegenden Ausführungsform sind insgesamt 16 Schenkelpolständerabschnitte 62A und 62B vorgesehen.
-
Die Schenkelpolständerabschnitte 62A und 62B sind mit einem vorgegebenen Spalt dazwischen in radialer Richtung bezogen auf den Schenkelpolläuferabschnitt 44 angeordnet. Die Schenkelpolständerabschnitte 62A und 62B sind so ausgebildet, dass sie dieselbe Breite wie die Breite w des Schenkelpolläuferabschnitts 44 aufweisen.
-
5 ist eine Ansicht, die die Lagebeziehung des Schenkelpolläuferabschnitts 44 und der Schenkelpolständerabschnitte 62A und 62B zeigt. In der vorliegenden Zeichnung ist zur Unterscheidung eines Teils der mehreren Schenkelpolabschnitte ein Buchstabe aus dem Alphabet, wie (a), am Ende jedes Codes angegeben. Es gibt Fälle, in denen dasselbe in den nachstehenden Zeichnungen gilt.
-
Die mehreren ersten Schenkelpolständerabschnitte 62A, die an einem ersten Kraftlinienwegabschnitt 56A vorgesehen sind, sind an den Stellen angeordnet, die jeweils in Umfangsrichtung um einen Winkel, der der Schenkelpolteilung λ jedes Schenkelpolläuferabschnitts 44 entspricht, verschoben sind. Die mehreren zweiten Schenkelpolständerabschnitte 62B, die an einem zweiten Kraftlinienwegabschnitt 56B vorgesehen sind, sind an den Stellen angeordnet, die jeweils in Umfangsrichtung um einen Winkel, der der Schenkelpolteilung λ entspricht, verschoben sind. Ferner sind die anderen zweiten Schenkelpolständerabschnitte 62B, die in Umfangsrichtung in der Nähe des ersten Schenkelpolständerabschnitts 62A nebeneinander liegen, an den Stellen angeordnet, die jeweils in Umfangsrichtung um einen Winkel, der der Schenkelpolteilung λ × 1,5 entspricht, verschoben sind.
-
Wenn daher n eine natürliche Zahl größer als oder gleich 1 ist, sind die ersten Schenkelpolständerabschnitte 62A an Stellen angeordnet, die jeweils in Umfangsrichtung um einen Winkel entsprechend λ × n bezogen auf die anderen ersten Schenkelpolständerabschnitte 62A verschoben sind. Beispielsweise ist der erste Schenkelpolständerabschnitt 62A(d) bezogen auf einen anderen ersten Schenkelpolständerabschnitt 62A(g), der sich im Uhrzeigersinn daneben befindet, um λ × 4 (= λ × 1,5 + λ + λ × 1,5) verschoben, und bezogen auf einen anderen ersten Schenkelpolständerabschnitt 62A(c), der sich gegen den Uhrzeigersinn daneben befindet, um λ × 1,0 verschoben. Dem ähnlich, sind die zweiten Schenkelpolständerabschnitte 62B an den Stellen angeordnet, die jeweils in Umfangsrichtung um einen Winkel entsprechend λ × n bezogen auf die anderen zweiten Schenkelpolständerabschnitte 62B verschoben sind.
-
Ferner sind die zweiten Schenkelpolständerabschnitte 62B an Stellen angeordnet, die jeweils in Umfangsrichtung um einen Winkel entsprechend λ × (n + 0,5) bezogen auf die ersten Schenkelpolständerabschnitte 62A verschoben sind. Beispielsweise ist der zweite Schenkelpolständerabschnitt 62B(e) bezogen auf den ersten Schenkelpolständerabschnitt62A(g), der sich im Uhrzeigersinn daneben befindet, um λ × 2,5 (= λ + λ × 1,5) verschoben und bezogen auf den ersten Schenkelpolständerabschnitt 62A(d), der sich gegen den Uhrzeigersinn daneben befindet, um λ × 1,5 verschoben.
-
Die Betriebsweise des obigen Generators 10 wird unter Verwendung der 6 bis 9 beschrieben. Jede Zeichnung zeigt einen Zustand, in dem der Läufer 40 in Richtung P um einen Phasenwinkel π/2 gedreht wird. Ferner ist in 6 und 8 von dem Magnetfluss, der in dem Läuferblechpaket 46 usw. fließt, hauptsächlich der Fluss des Hauptmagnetflusses gezeigt, und der Fluss des magnetischen Streuflusses wurde weggelassen. Überdies zeigen 7 und 9 den Fluss des magnetischen Streuflusses. Nachstehend ist der Phasenwinkel in der Lagebeziehung von 6 null, und die Phasenwinkel in 7 bis 9 sind π/2, π und 3π/2. Ferner ist zur Vereinfachung eine „O“-Markierung für einen Schenkelpolläuferabschnitt 44(a) angegeben.
-
Wie in 6 gezeigt, befinden sich, wenn der Phasenwinkel null ist, die ersten Schenkelpolständerabschnitte 62A an Stellen, die die Schenkelpolläuferabschnitte 44 in ihrer Nähe über die gesamte Breite in Umfangsrichtung überlagern, betrachtet aus der radialen Richtung des Läufers 40. Ferner befinden sich die zweiten Schenkelpolständerabschnitte 62B an Stellen, die die Schenkelpolläuferabschnitte 44 in ihrer Nähe über die gesamte Breite in Umfangsrichtung nicht überlagern, das heißt, an Stellen, die in Umfangsrichtung verschoben sind, betrachtet aus der radialen Richtung des Läufers 40. Mit anderen Worten, der Bereich, in dem der erste Schenkelpolständerabschnitt 62A einen Schenkelpolläuferabschnitt 44 in der Nähe in Umfangsrichtung überlagert (nachstehend als der erste Überlagerungsbereich bezeichnet), ist größer als der Bereich, in dem der zweite Schenkelpolständerabschnitt 62B einen anderen Schenkelpolläuferabschnitt 44 in der Nähe in Umfangsrichtung überlagert (nachstehend als der zweite Überlagerungsbereich bezeichnet). Daher wird ein zweiter magnetischer Widerstand R2, welcher der magnetische Widerstand zwischen dem zweiten Schenkelpolständerabschnitt 62B und dem Schenkelpolläuferabschnitt 44 ist, signifikant größer als ein erster magnetischer Widerstand R1, welcher der magnetische Widerstand zwischen dem ersten Schenkelpolständerabschnitt 62A und dem Schenkelpolläuferabschnitt 44 ist.
-
Im Ergebnis wird aufgrund des Magnetflusses, der ausgehend von einem Magneten 48 erzeugt wird, ein geschlossener Kraftlinienweg Mp gebildet, der durch den ersten Schenkelpolständerabschnitt 62A des ersten Ständerblechpakets 50A, das sich neben einer Magnetpolfläche des Magneten 48 befindet, und den ersten Schenkelpolständerabschnitt 62A des zweiten Ständerblechpakets 50B, das sich neben der anderen Magnetpolfläche befindet, verläuft. Beispielsweise bildet der Magnet 48(b) im oberen Teil der Zeichnung einen Kraftlinienweg Mp, der den Kraftlinien-Verbindungsabschnitt 54 des ersten Ständerblechpakets 50A(b) → den ersten Kraftlinienwegabschnitt 56A des ersten Ständerblechpakets 50A(b) → den ersten Schenkelpolständerabschnitt 62A(g) → den Schenkelpolläuferabschnitt 44(g) → den ringförmigen Grundkörper 42 → den Läufer 40 → die Schenkelpolläuferabschnitte 44(c) und (d) → die ersten Schenkelpolständerabschnitte 62A(c) und 62A(d) → den ersten Kraftlinienwegabschnitt 56A des zweiten Ständerblechpakets 50B(a) quert und wieder zum ursprünglichen Magneten 48(b) zurückkehrt.
-
Dieser Kraftlinienweg Mp ist so ausgebildet, dass er sich in jeder der Ankerspulen 60 in radialer Richtung verkettet. Da zu diesem Zeitpunkt die Magnetpole der mehreren Magnete 48, die sich in Umfangsrichtung gegenüberliegen, dieselbe Polarität haben, wird die Drehrichtung des Kraftlinienweges Mp, der von in Umfangsrichtung nebeneinander liegenden Magneten 48 erzeugt wird, entgegengesetzt sein. Beispielsweise wird ein Kraftlinienweg Mp, der von dem Magneten 48(b) im oberen Teil der Zeichnung erzeugt wird, gegen den Uhrzeigersinn verlaufen, und ein Kraftlinienweg Mp, der von dem Magneten 48(b) auf der linken Seite der Zeichnung erzeugt wird, im Uhrzeigersinn verlaufen. Im Ergebnis wird sich der von den separaten Magneten 48 erzeugte Magnetfluss in derselben Ausrichtung in einer Ankerspule 60 verketten. Beispielsweise werden sich der Magnetfluss, der von dem Magneten 48(b) im oberen Teil der Zeichnung erzeugt wird, und der Magnetfluss, der von dem Magneten 48(a) auf der linken Seite der Zeichnung erzeugt wird, in derselben Ausrichtung in der Ankerspule 60(b) im oberen Teil der Zeichnung verketten.
-
Wie in 7 gezeigt, befinden sich bei einem Phasenwinkel π/2 die ersten Schenkelpolständerabschnitte 62A, betrachtet aus der radialen Richtung des Läufers 40, an den Stellen, die die Schenkelpolläuferabschnitte 44 in ihrer Nähe im Wesentlichen über die Hälfte der Breite in Umfangsrichtung überlagern. Gleiches gilt für die zweiten Schenkelpolständerabschnitte 62B. Mit anderen Worten, der erste Überlagerungsbereich des ersten Schenkelpolständerabschnitts 62A bezogen auf den Schenkelpolläuferabschnitt 44 wird dem zweiten Überlagerungsbereich des zweiten Schenkelpolständerabschnitts 62B bezogen auf den Schenkelpolläuferabschnitt 44 entsprechen. Daher werden der erste magnetische Widerstand R1 und der zweite magnetische Widerstand R2 gleich groß werden.
-
Im Ergebnis wird aufgrund des Magnetflusses, der von einem Magneten 48 erzeugt wird, ein geschlossener Kraftlinienweg Mp gebildet, der durch den zweiten Schenkelpolständerabschnitt 62B des ersten Ständerblechpakets 50A, das sich neben einer Magnetpolfläche des Magneten 48 befindet, und den ersten Schenkelpolständerabschnitt 62A des zweiten Ständerblechpakets 50B, das sich neben der anderen Magnetpolfläche befindet, verläuft. Beispielsweise bildet der Magnet 48(b) im oberen Teil der Zeichnung einen Kraftlinienweg Mp, der den zweiten Kraftlinienwegabschnitt 56B des ersten Ständerblechpakets 50A(b) → die zweiten Schenkelpolständerabschnitte 62B(e) und (f) → die Schenkelpolläuferabschnitte 44(e) und 44(f) → den ringförmigen Grundkörper 42 → den Läufer 40 → die Schenkelpolläuferabschnitte 44(c) und 44(d) → die ersten Schenkelpolständerabschnitte 62A(c) und (d) → den ersten Kraftlinienwegabschnitt 56A des zweiten Ständerblechpakets 50B(a) quert und wieder zu dem ursprünglichen Magneten 48(b) zurückkehrt. Dieser Kraftlinienweg Mp bewegt sich in jeder Ankerspule 60 in radialer Richtung hin und her und ist so ausgebildet, dass er sich in jeder Ankerspule 60 verkettet.
-
Wie in 8 gezeigt, befinden sich bei einem Phasenwinkel π die ersten Schenkelpolständerabschnitte 62A, betrachtet aus der radialen Richtung des Läufers 40, an den Stellen, die die Schenkelpolläuferabschnitte 44 in ihrer Nähe nicht über die gesamte Breite in Umfangsrichtung überlagern, das heißt, den Stellen, die in Umfangsrichtung verschoben sind. Ferner befinden sich die zweiten Schenkelpolständerabschnitte 62B, betrachtet aus der radialen Richtung des Läufers 40, an Stellen, die die Schenkelpolläuferabschnitte 44 in ihrer Nähe über die gesamte Breite in Umfangsrichtung überlagern. Mit anderen Worten, der zweite Überlagerungsbereich des zweiten Schenkelpolständerabschnittes 62B wird bezogen auf den Schenkelpolläuferabschnitt 44 größer sein als der erste Überlagerungsbereich des ersten Schenkelpolständerabschnitts 62A bezogen auf den Schenkelpolläuferabschnitt 44. Daher wird der zweite magnetische Widerstand R2 signifikant größer werden als der erste magnetische Widerstand R1.
-
Im Ergebnis wird aufgrund des Magnetflusses, der von einem Magneten 48 erzeugt wird, ein geschlossener Kraftlinienweg Mp gebildet, der durch den zweiten Schenkelpolständerabschnitt 62B des ersten Ständerblechpakets 50A, das sich neben einer Magnetpolfläche des Magneten 48 befindet, und den zweiten Schenkelpolständerabschnitt 62B des zweiten Ständerblechpakets 50B, das sich neben der anderen Magnetpolfläche befindet, verläuft. Beispielsweise bildet der Magnet 48(b) im oberen Teil der Zeichnung einen Kraftlinienweg Mp, der den zweiten Kraftlinienwegabschnitt 56B des ersten Ständerblechpakets 50A(b) → die zweiten Schenkelpolständerabschnitte 62B(e) und (f) → die Schenkelpolläuferabschnitte 44(e) und 44(f) → den ringförmigen Grundkörper 42 → den Läufer 40 → die Schenkelpolläuferabschnitte 44(a) und 44(t) → die zweiten Schenkelpolständerabschnitte 62B(a) und 62B(b) → den Kraftlinienweg-Verbindungsabschnitt 54 des zweiten Ständerblechpakets 50B(a) quert und wieder zu dem ursprünglichen Magneten 48(b) zurückkehrt.
-
Dieser Kraftlinienweg Mp ist so ausgebildet, dass er sich in jeder der Ankerspulen 60 in radialer Richtung verkettet. Zu diesem Zeitpunkt ist der Kraftlinienweg Mp so ausgebildet, dass die Verkettungsausrichtung in der Ankerspule 60 im Vergleich zu einem Phasenwinkel null die entgegengesetzte Richtung in der radialen Richtung sein wird (bezogen auf 6).
-
Wie in 9 gezeigt, befinden sich bei einem Phasenwinkel 3π/2 die ersten Schenkelpolständerabschnitte 62A, betrachtet aus der radialen Richtung des Läufers 40, an Stellen, die die Schenkelpolläuferabschnitte 44 in ihrer Nähe im Wesentlichen über die Hälfte der Breite in Umfangsrichtung überlagern. Ferner befinden sich die zweiten Schenkelpolständerabschnitte 62B, betrachtet aus der radialen Richtung des Läufers 40, an den Stellen, die die Schenkelpolläuferabschnitte 44 in ihrer Nähe über die Hälfte der Breite in Umfangsrichtung überlagern. Daher werden der erste magnetische Widerstand R1 und der zweite magnetische Widerstand R2 gleich groß werden. Im Ergebnis wird derselbe Kraftlinienweg Mp wie bei einem Phasenwinkel π/2 gebildet.
-
Wie oben beschrieben, wird in einem Zustand, in dem der Phasenwinkel null ist, (nachstehend auch als der erste Zustand bezeichnet) der zweite magnetische Widerstand R2 signifikant größer werden als der erste magnetische Widerstand R1, und wird in einem Zustand, in dem der Phasenwinkel 3π/2 ist, (nachstehend als der zweite Zustand bezeichnet) der erste magnetische Widerstand R1 signifikant größer werden als der zweite magnetische Widerstand R2. Dreht sich der Läufer 40, werden der erste Zustand und der zweite Zustand abwechselnd geschaltet.
-
Wie in 6 und 8 gezeigt, wird in einer Ankerspule 60 (zum Beispiel Ankerspule 60(b)) im ersten Zustand ein Kraftlinienweg Mp gebildet, der sich in einer radialen Richtung verkettet, und im zweiten Zustand wird ein Kraftlinienweg Mp gebildet, der sich in der anderen radialen Richtung verkettet. Das heißt, beim Schalten zwischen dem ersten Zustand und dem zweiten Zustand erfolgt das Schalten so, dass die Ausrichtung des Magnetflusses, der sich in der radialen Richtung in jeder Ankerspule 60 verkettet, umgekehrt wird, wodurch eine Wechselstrom-induzierte elektromotorische Kraft in jeder Ankerspule 60 erzeugt wird. Zu diesem Zeitpunkt wird die Wechselstromleistung derselben Phase in jeder Ankerspule 60 erzeugt. Auf diese Weise werden in dem Generator 10 die Stellen der mehreren Schenkelpolläuferabschnitte 44 und der mehreren Schenkelpolständerabschnitte 62A und 62B so bestimmt, dass der erste Zustand und der zweite Zustand abwechselnd geschaltet werden.
-
Nunmehr werden die Funktionsweise und Wirkungen des Generators 10 beschrieben.
-
Im Allgemeinen erfüllt die Frequenz f (Hz) eines Generators die Beziehung der folgenden Formel (1) zwischen der Drehzahl N (U/min) des Läufers und der Anzahl von Polen P des Generators.
-
Die betreffenden Erfinder haben die Erkenntnis gewonnen, dass bei dem Generator 10 gemäß der vorliegenden Ausführungsform die Anzahl, erhalten durch Multiplizieren der Anzahl an Schenkelpolläuferabschnitten 44 mit zwei, die Anzahl der Pole P des Generators ergibt. Diese Erkenntnis wurde durch die Analyse unter Anwendung des in 3 gezeigten Aufbaus gewonnen. Bei dieser Analyse wurde die Drehzahl N des Läufers 40 auf 120 (U/min) eingestellt, wodurch die Frequenz f (Hz) der Leistung, die von der Ankerspule 60 erzeugt wird, erhalten wurde. Im Ergebnis wurde eine Frequenz f von 40 (Hz) erhalten, und durch die Formel (1) wurde die Anzahl, erhalten durch Multiplizieren der Anzahl an Schenkelpolläuferabschnitten 44 (20) mit zwei, als die Anzahl der Pole P des Generators bestätigt.
-
So wird sich bei dem Generator 10 gemäß der vorliegenden Ausführungsform, solange sich die Schenkelpolläuferabschnitte 44 und die Schenkelpolständerabschnitte 62A und 62B an den vorgegebenen Stellen befinden, die Frequenz der induzierten elektromotorischen Kraft erhöhen, wenn sich die Anzahl an Schenkelpolläuferabschnitten 44 erhöht, und es wird leicht eine Hochfrequenz-Wechselstromleistung erhalten, selbst wenn die Drehzahl des Läufers 40 niedrig ist. Da jedoch die Spannung der induzierten elektromotorischen Kraft proportional zu dem Produkt der Frequenz und des Magnetflusses, der sich in der Ankerspule 60 verkettet, ist, bedeutet die Fähigkeit zum Erhalt der Hochfrequenz-Wechselstromleistung, dass eine entsprechende Hochspannungs-Wechselstromleistung erhalten werden kann.
-
Ferner sind der erste Schenkelpolständerabschnitt 62A und der zweite Schenkelpolständerabschnitt 62B an Stellen zwischen dem Magneten 48 und dem Spulennutabschnitt 52 vorgesehen, so können die Abstände dazwischen noch leichter getrennten werden. Daher kann, selbst wenn diese zu unterschiedlichen Polaritäten von dem Magneten 48 angeregt werden, die Erzeugung des magnetischen Streuflusses zwischen dem ersten Schenkelpolständerabschnitt 62A und dem zweiten Schenkelpolständerabschnitt 62B leichter unterdrückt werden. Aus diesem Grund wird die Unterdrückung des magnetischen Streuflusses dazwischen bei gleichzeitiger Verringerung des Außendurchmessers des Läufers 40 und des Ständers 38 des Generators 10 leicht. Die Fähigkeit zur Unterdrückung der Erzeugung eines magnetischen Streuflusses zwischen dem ersten Schenkelpolständerabschnitt 62A und dem zweiten Schenkelpolständerabschnitt 62B bedeutet jedoch, dass eine Verringerung des Magnetflusses, der sich in der Ankerspule 60 verkettet, unterdrückt werden kann und der Erhalt einer ausreichenden Spannungsausgabe aus dem Generator 10 leichter wird.
-
Überdies erhöht sich beispielsweise bei einem Dreiphasenwechselstrom-Generator, bei dem eine Ankerspule um jeden von mehreren Schenkelpolabschnitten eines Ständers gewickelt ist, wie dem in der
japanischen Offenlegungsschrift 2012-182961 offenbarten, die Anzahl der Ankerspulen zusammen mit einer Erhöhung der Anzahl der Magnetpole des Läufers, was zu entsprechend hohen Kosten und einer Herabsetzung der Montageeigenschaften führt. Diesbezüglich muss in der vorliegenden Ausführungsform zum Erhalt der Hochfrequenz-Wechselstromleistung nur die Anzahl der Schenkelpolläuferabschnitte 44 erhöht werden, und die Anzahl der Magnete 48 oder der Ankerspulen 60 muss nicht erhöht werden; daher kann die Teilezahl verringert werden, was wiederum die Kosten reduziert, und es können gute Montageeigenschaften erhalten werden.
-
Überdies ändert bei einem herkömmlichen Klauenpolgenerator der Magnetfluss, der vom Magneten des Läufers in die Klauenabschnitte jedes Ständerblechpakets fließt, in dem Klauenabschnitt die Richtung in die axiale Richtung und fließt in Richtung des Grundkörpers des Klauenabschnitts. Die Querschnittsfläche des Kraftlinienweges, der senkrecht zur Kraftlinienwegrichtung dieses Klauenabschnitts ist (axiale Richtung), wird gemäß der Dicke und dem Umfang des Klauenabschnitts in radialer Richtung bestimmt. Hier wird, wenn der Außendurchmesser verringert wird, ohne die axiale Länge des Generators zu verändern, der Klauenabschnitt des Ständerblechpakets in Umfangsrichtung dünner, ohne dass die axiale Länge verändert wird, so dass die Spaltfläche, die dem Magneten gegenüber liegt, dünn und die Dicke in radialer Richtung verringert wird; im Ergebnis wird die Querschnittsfläche des Kraftlinienweges am Grundabschnitt des Klauenabschnitts klein. Daher wird tendenziell der Magnetfluss, den der Klauenabschnitt des Ständerblechpakets an der Spaltfläche aufnimmt, am Grundabschnitt des Klauenabschnitts mit einer kleinen Querschnittsfläche des Kraftlinienweges konzentriert, und es wird am Grundabschnitt wahrscheinlich zu einer magnetischen Sättigung kommen. Im Ergebnis kann der Magnetfluss, der sich in der Ankerspule verkettet, nur schwer fließen, und auch der Erhalt einer ausreichenden Spannungsausgabe aus dem Generator wird schwierig.
-
Diesbezüglich fließt bei dem Generator 10 gemäß der vorliegenden Ausführungsform der Magnetfluss in den Schenkelpolständerabschnitten 62A und 62B des Ständerblechpakets 50 nicht in axialer Richtung sondern in radialer Richtung. Die Querschnittsfläche des Kraftlinienweges, der senkrecht zur Kraftlinienwegrichtung dieser Schenkelpolständerabschnitte 62A und 62B (radiale Richtung) ist, wird gemäß der axialen Länge und dem Umfang der Schenkelpolständerabschnitte 62A und 62B bestimmt, die nicht so leicht verändert werden, selbst wenn der Außendurchmesser des Generators 10 verringert wird. Aus diesem Grund können, selbst wenn der Außendurchmesser des Generators 10 verringert wird, die Querschnittsfläche des Kraftlinienweges der Schenkelpolständerabschnitte 62A und 62B sichergestellt werden, indem die axiale Länge des Ständerblechpakets 50 erhöht wird. Daher kann, selbst wenn der Außendurchmesser des Generators 10 verringert wird, das Auftreten einer magnetischen Sättigung der Schenkelpolständerabschnitte 62A und 62B unterdrückt werden, eine Reduktion des Magnetflusses, der sich in der Ankerspule 60 verkettet, unterdrückt werden, und der Erhalt einer ausreichenden Spannungsausgabe aus dem Generator 10 wird leichter.
-
Überdies kann bei jedem Schalten des ersten Zustands und des zweiten Zustands die Ausrichtung des Kraftlinienweges Mp, der durch den einen Magneten 48 in der Ankerspule 60 erzeugt wird, umgekehrt werden, was im Vergleich zu einer nicht umgekehrten Ausrichtung eine größere Veränderungsmenge des Magnetflusses, der sich in der Ankerspule 60 verkettet, erlaubt; daher kann noch einfacher eine Hochspannungs-Wechselstromleistung erhalten werden. Überdies kann bei jedem Schalten des ersten Zustands und des zweiten Zustands die Ausrichtung des Kraftlinienwegs Mp, der in der einen Ankerspule 60, die einen Magneten 48 nutzt, erzeugt wird, umgekehrt werden; daher kann einfacher eine Hochspannungs-Wechselstromleistung erhalten werden, während gleichzeitig die Anzahl von Magneten 48 verringert wird.
-
Ferner ist jeder der ersten Schenkelpolständerabschnitte 62A bezogen auf einen anderen der ersten Schenkelpolständerabschnitte 62A um einen Winkel entsprechend λ × n verschoben, und jeder der zweiten Schenkelpolständerabschnitte 62B ist bezogen auf den ersten Schenkelpolständerabschnitt 62A um einen Winkel entsprechend λ × (n + 0,5) verschoben. Daher können die Relativlagen der Schenkelpolständerabschnitte 62A und 62B bezogen auf den Schenkelpolläuferabschnitt 44 ausgerichtet werden, die Art und Weise der Änderung des Kraftlinienwegs Mp, der von dem aus den Magneten 48 erzeugten Magnetfluss gebildet wird, kann angepasst werden und mit der Ankerspule 60 leichter eine Wechselstromleistung mit derselben Phase erhalten werden.
-
Ferner kann, da jedes der Ständerblechpakete 50A und 50B und das Läuferblechpaket 46 durch Schichten mehrerer Metallplatten gebildet werden können, der Erregungsverlust aufgrund eines Wirbelstroms in dem Abschnitt, durch den der Hauptmagnetfluss verläuft, signifikant unterdrückt werden.
-
10 ist eine Querschnittsansicht, die den Generator 10 gemäß der zweiten Ausführungsform zeigt, und 11 ist eine Querschnittsansicht, die eine Ankerspule 60 des Generators 10 zeigt. In dem Beispiel von 3 sind insgesamt 20 Schenkelpolläuferabschnitte 44 des Läufers 40 vorgesehen, in der vorliegenden Ausführungsform sind jedoch insgesamt 18 vorgesehen. Die Schenkelpolteilung λ wird 20° (= 360° / 18) betragen.
-
Im Beispiel von 3 sind insgesamt vier Magnete 48 und Ständerblechpakete 50A und 50B des Ständers 38 vorgesehen, in der vorliegenden Ausführungsform sind jedoch insgesamt jeweils zwei vorgesehen. Ferner sind im Beispiel von 3 jeweils zwei erste Ständerblechpakete 50A und zweite Ständerblechpakete 50B vorgesehen, in der vorliegenden Ausführungsform ist jedoch jeweils nur einer vorgesehen. Ferner sind in dem Beispiel von 3 jeweils zwei erste Schenkelpolständerabschnitte 62A und zweite Schenkelpolständerabschnitte 62B am ersten Kraftlinienwegabschnitt 56A und zweiten Kraftlinienwegabschnitt 56B vorgesehen, in der vorliegenden Ausführungsform sind jedoch jeweils vier vorgesehen. So ist die Anzahl der Schenkelpolläuferabschnitte 44 und der Schenkelpolständerabschnitte 62A und 62B nicht besonders eingeschränkt.
-
Die Betriebsweise des obigen Generators 10 wird unter Verwendung der 12 bis 15 beschrieben. Jede Zeichnung zeigt einen Zustand, in dem der Läufer 40 in der Richtung P um einen Phasenwinkel π/2 gedreht ist. Ferner ist in 12 und 14 von dem Magnetfluss, der im Läuferblechpaket 46 usw. fließt, hauptsächlich der Fluss des Hauptmagnetflusses gezeigt, und der Fluss des magnetischen Streuflusses wurde weggelassen. Überdies zeigen 13 und 15 den Fluss des magnetischen Streuflusses. Nachstehend ist der Phasenwinkel in der Lagebeziehung von 12 null, und die Phasenwinkel in 13 bis 15 betragen π/2, π und 3π/2.
-
Wie in 12 gezeigt, befinden sich, wenn der Phasenwinkel null ist, die ersten Schenkelpolständerabschnitte 62A, betrachtet aus der radialen Richtung des Läufers 40, an Stellen, die die Schenkelpolläuferabschnitte 44 in ihrer Nähe über die gesamte Breite in Umfangsrichtung überlagern. Die zweiten Schenkelpolständerabschnitte 62B befinden sich an Stellen, die die Schenkelpolläuferabschnitte 44 in ihrer Nähe nicht über die gesamte Breite in Umfangsrichtung überlagern, das heißt, an Stellen, die, betrachtet aus der radialen Richtung des Läufers 40, in Umfangsrichtung verschoben sind. Mit anderen Worten, der erste Überlagerungsbereich des ersten Schenkelpolständerabschnitts 62A bezogen auf den Schenkelpolläuferabschnitt 44 wird größer sein als der zweite Überlagerungsbereich des zweiten Schenkelpolständerabschnitts 62B bezogen auf den Schenkelpolläuferabschnitt 44. So wird ein geschlossener Kraftlinienweg Mp derart gebildet, dass er sich in der radialen Richtung in jeder Ankerspule 60 verkettet, genau wie in der ersten Ausführungsform.
-
Wie in 13 gezeigt, befinden sich, wenn der Phasenwinkel π/2 ist, die ersten Schenkelpolständerabschnitte 62A, betrachtet aus der radialen Richtung des Läufers 40, an Stellen, die die Schenkelpolläuferabschnitte 44 in ihrer Nähe über die Hälfte der Breite in Umfangsrichtung überlagern. Ferner befinden sich die zweiten Schenkelpolständerabschnitte 62B, betrachtet aus der radialen Richtung des Läufers 40, an Stellen, die die Schenkelpolläuferabschnitte 44 in ihrer Nähe nicht über die Hälfte der Breite in Umfangsrichtung überlagern. Mit anderen Worten, der erste Überlagerungsbereich des ersten Schenkelpolständerabschnitts 62A bezogen auf den Schenkelpolläuferabschnitt 44 wird dem zweiten Überlagerungsbereich des zweiten Schenkelpolständerabschnitts 62B bezogen auf den Schenkelpolläuferabschnitt 44 entsprechen. So wird ein geschlossener Kraftlinienweg Mp derart gebildet, dass er sich in jeder der Ankerspulen 60 in der radialen Richtung hin und her bewegt, genau wie in der ersten Ausführungsform.
-
Wie in 14 gezeigt, befinden sich, wenn der Phasenwinkel π ist, die ersten Schenkelpolständerabschnitte 62A, betrachtet aus der radialen Richtung des Läufers 40, an Stellen, die die Schenkelpolläuferabschnitte 44 in ihrer Nähe nicht über die gesamte Breite in Umfangsrichtung überlagern, das heißt, an Stellen, die in Umfangsrichtung verschoben sind. Die zweiten Schenkelpolständerabschnitte 62B befinden sich, betrachtet aus der radialen Richtung des Läufers 40, an Stellen, die die Schenkelpolläuferabschnitte 44 in ihrer Nähe über die gesamte Breite in Umfangsrichtung überlagern. Mit anderen Worten, der zweite Überlagerungsbereich des zweiten Schenkelpolständerabschnitts 62B bezogen auf den Schenkelpolläuferabschnitt 44 wird größer sein als der erste Überlagerungsbereich des ersten Schenkelpolständerabschnitts 62A bezogen auf den Schenkelpolläuferabschnitt 44. So wird ein geschlossener Kraftlinienweg Mp derart gebildet, dass er sich in der radialen Richtung in jeder Ankerspule 60 verkettet, genau wie in der ersten Ausführungsform.
-
Wie in 15 gezeigt, befinden sich, wenn der Phasenwinkel 3π/2 ist, die ersten Schenkelpolständerabschnitte 62A, betrachtet aus der radialen Richtung des Läufers 40, an Stellen, die die Schenkelpolläuferabschnitte 44 in ihrer Nähe über die Hälfte der Breite in Umfangsrichtung überlagern. Ferner befinden sich die zweiten Schenkelpolständerabschnitte 62B, betrachtet aus der radialen Richtung des Läufers 40, an Stellen, die die Schenkelpolläuferabschnitte 44 in ihrer Nähe über die Hälfte der Breite in Umfangsrichtung überlagern. Im Ergebnis wird derselbe Kraftlinienweg Mp wie beim Phasenwinkel π/2 gebildet.
-
Die betreffenden Erfinder haben die Erkenntnis gewonnen, dass auch bei dem obigen Generator 10 die Anzahl, erhalten durch Multiplizieren der Anzahl an Schenkelpolläuferabschnitten 44 mit zwei, die Anzahl der Pole P des Generators ergibt. Diese Erkenntnis wurde durch die Analyse unter Anwendung des in 10 gezeigten Aufbaus gewonnen. Bei dieser Analyse wurde die Drehzahl N des Läufers 40 auf 120 (U/min) eingestellt, wodurch die Frequenz f (Hz) der Leistung, die von der Ankerspule 60 erzeugt wird, erhalten wurde. Im Ergebnis wurde eine Frequenz f von 36 (Hz) erhalten, und durch die Formel (1) wurde die Anzahl, erhalten durch Multiplizieren der Anzahl an Schenkelpolläuferabschnitten 44 (18) mit zwei, als die Anzahl der Pole P des Generators bestätigt.
-
Daher wird auch bei dem Generator 10 gemäß der vorliegenden Ausführungsform die Frequenz der induzierten elektromotorischen Kraft bei einer Erhöhung der Anzahl an Schenkelpolläuferabschnitten 44 steigen, und es kann einfacher eine Hochfrequenz-Wechselstromleistung erhalten werden, selbst wenn die Drehzahl des Läufers 40 niedrig ist, genau wie in der ersten Ausführungsform. Auch in anderer Hinsicht können dieselbe Funktionsweise und Wirkungen wie in der ersten Ausführungsform erhalten werden.
-
Die vorliegende Erfindung wurde oben basierend auf den Ausführungsformen beschrieben, die Ausführungsformen veranschaulichen aber lediglich die Prinzipien und Anwendungen der vorliegenden Erfindung. Ferner können zahlreiche Modifikationen und Veränderungen der Anordnung an der Ausführungsform vorgenommen werden, ohne vom Sinn der vorliegenden Erfindung, wie sie in den Ansprüchen festgelegt ist, abzuweichen.
-
Der Generator 10 wurde am Beispiel eines Fahrrad-Generators beschrieben, dessen Verwendung ist aber nicht darauf beschränkt. Soll ferner der Generator 10 ein Fahrrad-Generator sein, muss sich der Läufer 40 lediglich in Verbindung mit der Drehung eines rotierenden Teils des Fahrrads 12 drehen. Das rotierende Teil wurde hier am Beispiel des Vorderrades 22 beschrieben, neben einer Nabenwelle und einer Kurbel kann das Teil aber auch eine Rolle oder dergleichen eines hinteren Umwerfers (Kettenspanners) sein. Ferner kann der Generator 10 nicht nur als ein Nabendynamo, sondern auch als ein Rollendynamo oder dergleichen ausgebildet sein. Als ein Beispiel für den Generator 10 wurde ein Außenläufer-Generator gezeigt, der Generator kann aber auch ein Innenläufer-Generator sein, bei dem der Läufer 40 an der Innenumfangsseite des Ständers 38 angeordnet ist.
-
Es wurde ein Beispiel beschrieben, in dem das erste Ständerblechpaket 50A und das zweite Ständerblechpaket 50B des Ständers 38 als separate Körper ausgebildet sind, die beiden können aber auch integral ausgebildet sein. Ferner wurde ein Beispiel beschrieben, bei dem die Breite der Schenkelpolständerabschnitte 62A und 62B der Breite w des Schenkelpolläuferabschnitts 44 entspricht, die Breite kann aber auch kleiner oder gleich der Breite w des Schenkelpolläuferabschnitts 44 oder größer oder gleich der Breite w des Schenkelpolläuferabschnitts 44 sein.
-
Die Positionen des Schenkelpolläuferabschnitts 44 und der Schenkelpolständerabschnitte 62A und 62B sind nicht auf die Beispiele in den Zeichnungen beschränkt, solange ein erster Zustand, in dem der zweite magnetische Widerstand größer ist als der erste magnetische Widerstand, und ein zweiter Zustand, in dem der erste magnetische Widerstand größer ist als der zweite magnetische Widerstand, abwechselnd zu schalten sind.
-
Bei der Erfüllung dieser Bedingungen kann der erste Zustand so ausgebildet sein, dass der erste Überlagerungsbereich des ersten Schenkelpolständerabschnitts 62A bezogen auf den Schenkelpolläuferabschnitt 44 größer ist als der zweite Überlagerungsbereich des zweiten Schenkelpolständerabschnitts 62B bezogen auf den Schenkelpolläuferabschnitt 44. Ferner kann bei der Erfüllung dieser Bedingung der zweite Zustand so ausgebildet sein, dass der zweite Überlagerungsbereich größer ist als der erste Überlagerungsbereich.
-
Beispielsweise wurde in 6 und 12 ein Beispiel beschrieben, bei dem im ersten Zustand der erste Überlagerungsbereich ein Bereich über die gesamte Breite des ersten Schenkelpolständerabschnitts 62A in Umfangsrichtung ist und es keinen zweiten Überlagerungsbereich gibt. Neben Vorstehendem kann im ersten Zustand der erste Überlagerungsbereich derselbe Bereich sein wie in dem Beispiel der Zeichnung, während der zweite Überlagerungsbereich als der Bereich festgelegt ist, der weniger als oder genau die Hälfte der Breite des zweiten Schenkelpolständerabschnitts 62B, bezogen auf den Schenkelpolläuferabschnitt 44, der sich der Nähe des zweiten Schenkelpolständerabschnitts 62B befindet, überlagert. Hier wird sich der zweite Schenkelpolständerabschnitt 62B an einer Stelle befinden, die in Umfangsrichtung bezogen auf einen der Schenkelpolläuferabschnitte 44 verschoben ist, so dass der zweite Überlagerungsbereich kleiner sein wird als der erste Überlagerungsbereich.
-
Dem ähnlich wurde in 8 und 14 ein Beispiel beschrieben, bei dem im zweiten Zustand der zweite Überlagerungsbereich ein Bereich über die gesamte Breite des zweiten Schenkelpolständerabschnitts 62B in Umfangsrichtung ist und es keinen ersten Überlagerungsbereich gibt. Neben Vorstehendem kann im zweiten Zustand beispielsweise der zweite Überlagerungsbereich derselbe Bereich wie im Beispiel der Zeichnung sein, während der erste Überlagerungsbereich als ein Bereich festgelegt ist, der weniger als oder gleich die Hälfte der Breite des ersten Schenkelpolständerabschnitts 62A, bezogen auf den Schenkelpolläuferabschnitt 44, der sich in der Nähe des ersten Schenkelpolständerabschnitts 62A befindet, überlagert.
-
BEZUGSZEICHEN
-
- 10
- Generator
- 12
- Fahrrad
- 22
- Vorderrad (rotierender Abschnitt)
- 26
- Nabe
- 38
- Ständer
- 40
- Läufer
- 44
- Schenkelpolläuferabschnitt
- 46
- Läuferblechpaket
- 48
- Magnet
- 50A
- erstes Ständerblechpaket
- 50B
- zweites Ständerblechpaket
- 52
- Spulennutabschnitt
- 56A
- erster Kraftlinienwegabschnitt
- 56B
- zweiter Kraftlinienwegabschnitt
- 60
- Ankerspule
- 62A
- erster Schenkelpolständerabschnitt
- 62B
- zweiter Schenkelpolständerabschnitt