CN211687331U - 剥离装置 - Google Patents
剥离装置 Download PDFInfo
- Publication number
- CN211687331U CN211687331U CN201922318952.9U CN201922318952U CN211687331U CN 211687331 U CN211687331 U CN 211687331U CN 201922318952 U CN201922318952 U CN 201922318952U CN 211687331 U CN211687331 U CN 211687331U
- Authority
- CN
- China
- Prior art keywords
- stripping
- feeding track
- release film
- peeling
- adsorption
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Landscapes
- Folding Of Thin Sheet-Like Materials, Special Discharging Devices, And Others (AREA)
Abstract
一种剥离装置,用于将具有粘性的物料从离型膜上剥离,其包括用于运送所述物料和所述离型膜的送料轨道、位于所述送料轨道一侧的剥离机构、能够相对所述剥离机构上下移动的用于吸取所述物料的吸附机构及与所述送料轨道、所述剥离机构及所述吸附机构电性连接的控制单元。所述剥离机构与所述送料轨道之间存在间隙,所述送料轨道运转时,所述离型膜通过该间隙后被收集,所述物料逐渐脱离所述离型膜被逐步运送到所述剥离机构上。当所述物料接触所述剥离机构达到预设时间时,所述控制单元控制所述吸附机构吸取所述物料。减少所述吸附机构吸取所述物料时所述物料与所述离型膜上的接触面积。
Description
技术领域
本实用新型涉及电子行业产品组装技术领域,尤其涉及一种剥离装置。
背景技术
传统从离型膜取物料制程常使用手工与设备两种形式,现有的两种形式均存在共性问题。手工从离型膜上分离物料,此种方式操作完全依靠员工的作业手法去掌控取泡棉的成功率,无法做到通用性,需要经过严格漫长的培训,并且取出的物料品质无法保证,影响组装良率。设备从离型膜上取物料,主要运用传统的送料机构,利用机械手直接从离型膜上吸取物料,由于物料来料底部粘性力无法管控,若要求的物料底部粘性力过低,物料贴到产品上时极易容易脱落,不符合制程要求,若要求来料物料底部粘性力过大,将导致机械手吸取物料时无法做到完全取料成功,导致抛料率过高,造成批量浪费。
实用新型内容
本实用新型的目的在于提供了一种结构简单、取料成功率高且能够保证物料品质的剥离装置。
为实现前述目的,本实用新型采用如下技术方案:一种剥离装置,用于将具有粘性的物料从离型膜上剥离,其包括用于运送所述物料和所述离型膜的送料轨道、位于所述送料轨道一侧的剥离机构、能够相对所述剥离机构上下移动的用于吸取所述物料的吸附机构及与所述送料轨道、所述剥离机构及所述吸附机构电性连接的控制单元。所述控制单元用于控制所述送料轨道、所述剥离机构和所述吸附机构的动作。所述剥离机构与所述送料轨道之间存在间隙,所述送料轨道运转时,所述离型膜通过该间隙后被收集,所述物料逐渐脱离所述离型膜被逐步运送到所述剥离机构上。当所述物料接触所述剥离机构达到预设时间时,所述控制单元控制所述吸附机构吸取所述物料。
进一步地,所述的剥离装置还包括设置于所述剥离机构上用于承载所述物料的泡沫棉。
进一步地,所述剥离机构具有承载所述物料的上端面,所述泡沫棉铺设在所述剥离机构的所述上端面上。
进一步地,所述剥离机构还包括设置在所述剥离机构上用于检测所述物料是否被移送到所述泡沫棉上的检测机构。
进一步地,所述检测机构包括感应器,所述感应器上设有感应探头,所述控制单元与所述检测机构电性连接。
进一步地,所述感应探头设置在所述泡沫棉与所述剥离机构的所述上端面之间。
进一步地,所述物料的形状为圆形或三角形或四边形。
进一步地,所述吸附机构包括机械臂和位于所述机械臂末端的吸嘴。
进一步地,所述剥离机构还包括能够调节所述剥离机构与所述送料轨道之间的间隙的调节机构。
进一步地,所述调节机构包括固定部、能够使所述剥离机构相对所述固定部移动的调节件及对所述剥离机构的运动进行导向的导向件。
本实用新型剥离装置的所述控制单元在所述物料部分位于所述剥离机构上时控制所述吸附机构吸取所述物料,减少所述物料与所述离型膜上的接触面积,从而使所述物料下方的胶层在所述离型膜上的粘性力作用力减少,降低了所述吸附机构在吸取所述物料时的吸取难度,并且增加了吸取良率、减少所述物料抛料率。
附图说明
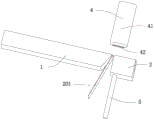
图1为本实用新型剥离装置的正视图。
图2为本实用新型剥离装置去除调节机构的部分立体分解图。
图3为本实用新型剥离装置的另一视角的部分立体分解图。
图4为图3的进一步立体分解图。
具体实施方式
为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。
参照图1及图2所示,料带200包括离型膜201及粘附在所述离型膜 201上的粘性物料202。本实用新型剥离装置100包括运送所述料带200 的送料轨道1、位于所述送料轨道1一侧的剥离机构2、设置于所述剥离机构2上用于承载所述物料202的泡沫棉3、能够相对所述剥离机构2移动的用于吸取所述物料202的吸附机构4、设置在所述剥离机构2上用于检测所述物料202是否移动到所述泡沫棉3上的检测机构及用于控制所述送料轨道1和所述吸附机构4的动作的控制单元(未图示)。所述控制单元与所述送料轨道1、所述剥离机构2以及所述吸附机构4电性连接,用于控制所述送料轨道1、所述剥离机构2和所述吸附机构4的动作。
在下文描述中,定义图1中的左右方向(所述料带200进给的方向) 为左右方向、上下方向(垂直于所述料带200的方向)为上下方向、与左右方向和上下方向正交的方向为前后方向。在下文描述中,上、下、左、右、前、后被用来描述相关元件之间的位置关系,使描述一个元件与另一个元件的位置关系的说明变得简单,但该些方位上的描述对技术本身不产生任何限定意义。
结合图3所示,所述送料轨道1平行于左右方向设置,所述剥离机构 2在所述料带200进给的方向上位于所述送料轨道1的前方并与所述送料轨道1之间存在间隙,所述送料轨道1具有承载所述料带200的上表面11,所述剥离机构2具有承载所述物料202的上端面21、朝向所述送料轨道1 的左端面22及与所述左端面22相对设置的右端面23,所述泡沫棉3铺设在所述剥离机构2的所述上端面21上,所述吸附机构4位于所述送料轨道1和所述剥离机构2的上方。所述送料轨道1运转时,所述离型膜201 通过该间隙后被收集,所述物料202逐渐脱离所述离型膜201被逐步运送到所述剥离机构2上。
所述吸附机构4包括机械臂41和位于所述机械臂41末端的吸嘴42,所述吸嘴42位于所述送料轨道1和所述剥离机构2上方。
所述检测机构包括感应器5,所述感应器5上设有感应探头(未图示),所述控制单元还与所述检测机构电性连接以接收所述检测机构检测到的信息并根据该信息控制所述送料轨道1和所述吸附机构4的动作。
本实用新型揭示的实施例中,所述感应器5为红外光感应器,所述感应探头所述感应探头设置在所述泡沫棉3与所述剥离机构2的所述上端面 21之间。
所述检测机构检测到所述物料202移动到所述泡沫棉3上之后,将该信息传递给所述控制单元,所述控制单元在所述物料202接触所述泡沫棉 3的时间达到预设时间之后向所述送料轨道1传达停止传送所述料带200 的指令,同时向所述机械臂41传达吸附所述物料202的指令。在所述机械臂41完成所述物料202吸附之后,所述控制单元向所述送料轨道1传达继续送料的指令,周而复始,直到所有所述物料202都被从所述离型膜 201上剥离。
预设时间根据所述物料202底部粘胶层的粘性、所述物料202的尺寸等设定,例如:当所述物料202底部粘胶层的粘性较大或所述物料202的尺寸较大时,将预设时间适当增加,使所述物料202与所述离型膜201之间的接触面积较少时再驱动所述吸附机构4吸取所述物料202,此时因所述物料202与所述离型膜201的接触面积较小而降低所述物料202与所述离型膜201之间的粘性力,因而所述吸附机构4只需较小的吸附力即可将所述物料202吸附。
在本实用新型揭示的实施例中,所述物料202为圆片状,但本实用新型所述剥离装置100能够剥离的所述物料202的形状不限于圆形,也可是三角形、四边形等。
所述送料轨道1和所述剥离机构2之间的间隙可以根据所述离型膜201的厚度进行调整以便于收集不同厚度的所述离型膜201。进一步地,本实用新型剥离装置100还包括调节机构6,所述调节机构6能够调节所述剥离机构2在左右方向上的位置,从而调节所述剥离机构2与所述送料轨道1之间的间隙。
结合图3及图4所示,具体地,所述调节机构6包括朝向所述剥离机构2的所述右端面23设置的固定部61、能够使所述剥离机构2相对所述固定部61移动的调节件62及连接在所述剥离机构2与所述调节件62之间对所述剥离机构2的运动进行导向的导向件63。
所述固定部61被固定在机架(未图示)上而空间位置被固定,其设有供所述调节件62穿设的通孔611及供所述导向件63穿设的第一导向孔 612,所述剥离机构2上设有容纳所述调节件62的容纳孔25及容纳所述导向件63的第二导向孔26,所述通孔611在左右方向上贯穿所述固定部61,所述容纳孔25设置为自所述右端面23向左凹设而成的盲孔。所述调节件62包括螺杆621、套设在所述螺杆上的旋钮622及刻度筒623,所述刻度筒623上具有刻度(未图示),所述螺杆621穿过所述固定部61的所述通孔611后其端部固定在所述剥离机构2的所述容纳孔25内。
当所述离型膜201的厚度改变时,转动所述调节件62上的旋钮使所述螺杆621伸缩从而使所述剥离机构2相对所述固定部61移动,从而实现调节所述剥离结构与所述送料轨道1之间的间隙的目的。所述剥离机构 2相对所述固定部61移动的距离能够通过所述刻度筒623上的刻度进行精确控制。
所述导向件63、所述第一导向孔612、所述第二导向孔26均设置为两个。所述导向件63的一端与所述固定部61的所述第一导向孔612之间过盈配合、另一端与所述剥离机构2的所述第二导向孔26之间间隙配合。在所述剥离机构2相对所述固定部61移动时,所述导向件63与所述第一导向孔612、所述第二导向孔26配合以保证所述剥离机构2相对所述固定部61在预设的方向上平稳的移动。
本实用新型剥离装置100的工作过程如下:
S1:所述送料轨道1将所述料带200向靠近所述剥离机构2的方向输送,所述物料202逐渐脱离所述离型膜201被逐步运送到所述剥离机构2 的所述泡沫棉3上,所述离型膜201通过所述送料轨道1和所述剥离机构 2之间的间隙后被收集,当所述物料202接触到所述泡沫棉3时,所述检测机构将所述物料202已运送到所述泡沫棉3上的信息传递给所述控制单元;S2:经过预设时间之后,所述控制单元向所述送料轨道1传达停止传送所述料带200的指令和向机械臂传达吸附所述物料202的指令,此时,所述物料202一部分在所述泡沫棉3上、一部分在所述离型膜201上;S3:机械臂向下运动使所述吸嘴42将所述物料202吸附并移送到预设位置; S4:当所述检测机构检测到所述物料202被从所述泡沫棉3上移走之后,将此信息传递给所述控制单元,所述控制单元将继续传送所述料带200的治疗传递给所述送料轨道1。重复S1至S4。
本实用新型剥离装置100设置所述剥离机构2,所述控制单元在所述物料20部分位于所述剥离机构2上时控制所述吸附机构4吸取所述物料 202,减少所述物料202与所述离型膜201上的接触面积,从而使所述物料202下方的胶层在所述离型膜201上的粘性力作用力减少,降低了所述吸附机构4在吸取所述物料202时的吸取难度,并且增加了吸取良率、减少所述物料202抛料率;另外,本实用新型剥离装置100设置检测单元和能够针对不同粘性和尺寸的所述物料202设置相应的预设时间的所述控制单元,适应性地调整所述物料202与所述离型膜201之间的接触面积,从而降低对所述吸附机构4的吸附力要求和所述物料202粘性方面的要求,降低所述吸附机构4和所述物料202成本;进一步地,本实用新型剥离装置100能够适用于不同形状、不同尺寸的所述物料202和不同厚度的所述离型膜201,通用性强,能有效降低生产、制造成本。
以上实施例仅用于说明本实用新型而并非限制本实用新型所描述的技术方案,对本说明书的理解应该以所属技术领域的技术人员为基础,尽管本说明书参照上述的实施例对本实用新型已进行了详细的说明,但是,本领域的普通技术人员应当理解,所属技术领域的技术人员仍然可以对本实用新型进行修改或者等同替换,而一切不脱离本实用新型的精神和范围的技术方案及其改进,均应涵盖在本实用新型的权利要求范围内。
Claims (10)
1.一种剥离装置(100),用于将具有粘性的物料(202)从离型膜(201)上剥离,其特征在于:包括:
送料轨道(1),其用于运送所述物料(202)和所述离型膜(201);
剥离机构(2),其位于所述送料轨道(1)一侧;
吸附机构(4),其能够相对所述剥离机构(2)上下移动,用于吸取所述物料(202);及
控制单元,其与所述送料轨道(1)、所述剥离机构(2)及所述吸附机构(4)电性连接,用于控制所述送料轨道(1)、所述剥离机构(2)和所述吸附机构(4)的动作,
所述剥离机构(2)与所述送料轨道(1)之间存在间隙,所述送料轨道(1)运转时所述离型膜(201)通过该间隙后被收集,所述物料(202)逐渐脱离所述离型膜(201)被逐步运送到所述剥离机构(2)上,当所述物料(202)接触所述剥离机构(2)达到预设时间时,所述控制单元控制所述吸附机构(4)吸取所述物料(202)。
2.根据权利要求1所述的剥离装置(100),其特征在于:还包括设置于所述剥离机构(2)上用于承载所述物料(202)的泡沫棉(3)。
3.根据权利要求2所述的剥离装置(100),其特征在于:所述剥离机构(2)具有承载所述物料(202)的上端面(21),所述泡沫棉(3)铺设在所述剥离机构(2)的所述上端面(21)上。
4.根据权利要求3所述的剥离装置(100),其特征在于:还包括设置在所述剥离机构(2)上用于检测所述物料(202)是否被移送到所述泡沫棉(3)上的检测机构。
5.根据权利要求4所述的剥离装置(100),其特征在于:所述检测机构包括感应器(5),所述感应器(5)上设有感应探头,所述控制单元与所述检测机构电性连接。
6.根据权利要求5所述的剥离装置(100),其特征在于:所述感应探头设置在所述泡沫棉(3)与所述剥离机构(2)的所述上端面(21)之间。
7.根据权利要求1所述的剥离装置(100),其特征在于:所述物料(202)的形状为圆形或三角形或四边形。
8.根据权利要求1所述的剥离装置(100),其特征在于:所述吸附机构(4)包括机械臂(41)和位于所述机械臂(41)末端的吸嘴(42)。
9.根据权利要求1所述的剥离装置(100),其特征在于:还包括能够调节所述剥离机构与所述送料轨道(1)之间的间隙的调节机构(6)。
10.根据权利要求9所述的剥离装置(100),其特征在于:所述调节机构(6)包括固定部(61)、能够使所述剥离机构(2)相对所述固定部(61)移动的调节件(62)及对所述剥离机构(2)的运动进行导向的导向件(63)。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201922318952.9U CN211687331U (zh) | 2019-12-19 | 2019-12-19 | 剥离装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201922318952.9U CN211687331U (zh) | 2019-12-19 | 2019-12-19 | 剥离装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN211687331U true CN211687331U (zh) | 2020-10-16 |
Family
ID=72793288
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201922318952.9U Active CN211687331U (zh) | 2019-12-19 | 2019-12-19 | 剥离装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN211687331U (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115196128A (zh) * | 2022-06-30 | 2022-10-18 | 杭州长川科技股份有限公司 | 物料吸取分离装置及物料吸取分离方法 |
-
2019
- 2019-12-19 CN CN201922318952.9U patent/CN211687331U/zh active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115196128A (zh) * | 2022-06-30 | 2022-10-18 | 杭州长川科技股份有限公司 | 物料吸取分离装置及物料吸取分离方法 |
| CN115196128B (zh) * | 2022-06-30 | 2024-04-16 | 杭州长川科技股份有限公司 | 物料吸取分离装置及物料吸取分离方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20100096090A1 (en) | Sticking apparatus | |
| CN105292653B (zh) | 自动贴标机 | |
| KR102214951B1 (ko) | 라벨 자동 부착 시스템 | |
| EP1962324B1 (en) | Adhesive tape joining apparatus | |
| CN211687331U (zh) | 剥离装置 | |
| CN115339685B (zh) | 自动贴膜机器人 | |
| KR100770411B1 (ko) | 커버레이 부착 시스템 및 그 방법 | |
| CN212352116U (zh) | 裁切机构及贴胶装置 | |
| AU2017441328B2 (en) | Banding and packaging device | |
| CN113359337B (zh) | Lcd模组的侧边包覆设备 | |
| CN111048448A (zh) | 集成电路引线框架常温贴胶带机 | |
| KR101468806B1 (ko) | 라벨 부착 장치 | |
| US8562778B2 (en) | Tape adhering apparatus and tape adhering method | |
| CN116315131A (zh) | 新型电池侧胶贴附装置 | |
| KR101514026B1 (ko) | 자동 테이핑 장치 | |
| KR20170019856A (ko) | 라벨 분리 기능이 향상된 라벨 피더 | |
| CN213139366U (zh) | 一种吸附机构、机械手及自动贴纸装置 | |
| JP2006264906A (ja) | テープ貼込装置 | |
| CN218103688U (zh) | 一种按键粘贴设备 | |
| CN214357220U (zh) | 一种布标机 | |
| CN216189869U (zh) | 一种贴胶机 | |
| JP2678061B2 (ja) | テープ貼着装置 | |
| CN220722928U (zh) | 一种柔性卷料上带有粘结剂透气膜的自动剥离粘贴装置 | |
| CN114408662A (zh) | 一种自动折叠定型收料一体机 | |
| JPH0790972B2 (ja) | 粘着テ−プ片の貼付方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |