CN203044362U - 连接器外壳引脚变形自动筛选机 - Google Patents
连接器外壳引脚变形自动筛选机 Download PDFInfo
- Publication number
- CN203044362U CN203044362U CN 201220637634 CN201220637634U CN203044362U CN 203044362 U CN203044362 U CN 203044362U CN 201220637634 CN201220637634 CN 201220637634 CN 201220637634 U CN201220637634 U CN 201220637634U CN 203044362 U CN203044362 U CN 203044362U
- Authority
- CN
- China
- Prior art keywords
- station
- connector shell
- manipulator
- slide
- arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn - After Issue
Links
Images











Landscapes
- Manipulator (AREA)
Abstract
本实用新型公开一种连接器外壳引脚变形自动筛选机,包括有振动盘安装架、振动盘、振动送料通道、检测台、推料机构、上料机械手、检测机构、第一送出机械手、良品送出通道、第二送出机械手、不良品收集箱。对连接器外壳引脚进行检测时,振动盘在抖动时将连接器外壳整齐地送到振动送料通道末端的进料工位A上,推料机构将连接器外壳送到指定的吸取上料工位B,由上料机械手将连接器外壳送到检测工位C,用检测机构对连接器外壳的引脚进行检测,当各引脚质量良好无变形时,用第一送出机械手吸至第一下料工位D,由良品送出通道送出,当连接器外壳引脚有变形时,用第二送出机械手夹至第二下料工位E,放入到不良品收集箱中。
Description
技术领域
本实用新型涉及电连接器质量检测设备领域技术,尤其是指一种连接器外壳引脚变形自动筛选机。
背景技术
随着社会的发展,各种连接器在不同的电子设备( 如电子通讯设备、计算机等设备) 中得到了广泛的应用,连接器的需求量非常大。连接器一般是通过引脚插到电路板上进行焊接以固定,一旦引脚变形,便无法插入到PCB板的焊口中,因此检测连接器外壳各引脚是否变形非常重要。
目前国内大批量的连接器外壳引脚的质量检测大部分是直接通过人眼进行观察和判断。大批量的连接器产品检测往往需要大量的员工进行高重复性的工作。这种产品缺陷检测方式有许多不足之处,首先,人眼长时间工作在高光源下工作,极易疲劳,容易误判和漏判;其次,由于每个人对标准的认识程度和理解程度不同,主观判断的标准也不一样,难以量化,因此在检测过程中,没有统一的检测标准;最后,由于检测的工作量大、重复性高,对人眼的伤害严重。而且人们根本无法用肉眼连续稳定地进行,不仅效率较低,工作强度大,而且产品的人力成本也相应变高。
实用新型内容
有鉴于此,本实用新型针对现有技术存在之缺失,其主要目的是提供一种连接器外壳引脚变形自动筛选机,对连接器外壳引脚的自动检测,并在检测后对良品和不良品进行自动分类,整机实现全自动作运作,无需人工操作,有效提高生产率,节约时间及人力成本。
为实现上述目的,本实用新型采用如下之技术方案:
一种连接器外壳引脚变形自动筛选机,包括
一振动盘安装架;
一振动盘,固装于振动盘安装架上;
一振动送料通道,连接于振动盘;
一检测台,位于振动盘安装架的旁边,该检测台针对送料轨迹依次设有进料工位、吸取上料工位、检测工位、第一下料工位和第二下料工位;
一用于将连接器外壳从进料工位送至吸取上料工位的推料机构,安装于检测台上且对应进料工位,该推料机构包括推料气缸、推动滑块和推料通道,该推料通道与前述振动送料通道驳接,该推动滑块连接于推料气缸的活塞杆并可活动地伸入到推料通道中,推动滑块的头端设有一用于卡住连接器外壳并来回滑动于进料工位和吸取上料工位之间的限位槽;
一上料机械手,安装于检测台上且对应吸取上料工位,该上料机械手包括由两电机驱动而移动的机械手臂、以及用于将连接器外壳从吸取上料工位送至检测工位的吸咀机构,该吸咀机构连接于机械手臂的末端;
一检测机构,安装于检测台上且对应检测工位,该检测机构包括检测座和用于检测连接器外壳是否良品的红外线探头,该检测座上设有供连接器外壳之引脚插入的插孔,且检测座上还设有可被连接器外壳遮挡的通孔,该红外线探头安装于通孔中;
一用于良品下料的第一送出机械手,安装于检测台上且对应第一下料工位,该第一送出机械手包括由两电机驱动而移动的机械手臂、以及用于将连接器外壳从检测工位送至第一下料工位的吸咀机构,该吸咀机构连接于机械手臂的末端;
一用于不良品下料的第二送出机械手,安装于检测台上且对应第二下料工位,该第二送出机械手包括由气缸及电机驱动而移动的机械手臂、以及用于将不及格的连接器外壳送至第二下料工位的夹料机构,该夹料机构连接于机械手臂的末端。
优选的,所述推料通道设在一个固定于检测台的推料座上,该推料通道与振动送料通道垂直驳接,于推料座上设有一个连通推料通道与振动送料通道的缺口,于该推料座的顶部还设有一压住推动滑块的盖板。
优选的,所述上料机械手和第一送出机械手安装在同一个固定支架上,且上料机械手和第一送出机械手的结构相同。
优选的,所述第一送出机械手的机械手臂包括升降手臂和平移手臂,所述吸咀机构包括吸咀安装座以及连接于吸咀安装座中的吸咀,该吸咀安装座固定于平移手臂上。
优选的,该升降手臂包括第一电机、连接座、纵向滑块以及纵向滑槽,该第一电机固装于固定支架,第一电机的主轴接连接座,该纵向滑槽设在固定支架上,该纵向滑块固定于连接座并可上下活动地卡合于纵向滑槽。
优选的,所述平移手臂包括第二电机、滑座、水平滑块以及水平滑槽,该第二电机固定于连接座,第二电机的主轴接滑座,该水平滑块固定于连接座,该水平滑槽设在滑座上并可前后活动地卡合于水平滑块。
优选的,所述检测座包括一底板、两侧板以及一顶板,各插孔设在顶板上,通孔位于各插孔之间围成的中心位置。
优选的,所述第二送出机械手的机械手臂包括橫走手臂和竖走手臂,橫走手臂和竖走手臂架设在一固定座上,该夹料机构连接于竖走手臂上。
优选的,所述橫走手臂包括气缸、连接座、第一滑座、横向滑块以及横向滑槽,该气缸固装于固定座上,气缸的活塞杆接连接座,连接座固定于第一滑座,该横向滑块直接形成于固定座的顶部,该横向滑槽设在第一滑座上并可左右滑动地扣合于横向滑块上。
优选的,所述竖走手臂包括驱动电机、第二滑座、竖向滑块以及竖向滑槽,该驱动电机固定于连接座,驱动电机的主轴连接于第二滑座,该竖向滑块设在第一滑座上,该竖向滑槽设在第二滑座上并可上下移动地扣合于纵向滑块上。
本实用新型与现有技术相比具有明显的优点和有益效果,具体而言,由上述技术方案可知,本装置能准确快速地识别连接器外壳引脚是否存在变形,并对有缺陷的产品和良品进行分类,能够取代传统采用人眼观察和判断的工序,从而避免人眼判断的诸多不足,而且全程自动化,操作方便,大大降低劳动强度,不仅提高了检测效率和准确性,而且检测速度快,有效缩短产品生产周期,降低成本,大大提高了生产效率与产品合格率,增强企业的竞争力。
为更清楚地阐述本实用新型的结构特征和功效,下面结合附图与具体实施例来对本实用新型进行详细说明。
附图说明
图1是本实用新型之实施例的组装立体示意图;
图2是图1的背面视图;
图3是图1的俯视图;
图4是图1的主视图;
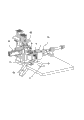
图5是本实用新型之实施例中推料机构、上料机械手和第一送出机械手的示意图;
图6是本实用新型之实施例中推料机构的结构示意图;
图7是本实用新型之实施例中推料机构的分解图;
图8是图5的另一视角图;
图9是图8的分解图;
图10是本实用新型之实施例中上料机械手和第一送出机械手的示意图;
图11是本实用新型之实施例中第一送出机械手的示意图;
图12是图11的分解图;
图13是本实用新型之实施例中检测机构的结构示意图;
图14是图13中检测状态的示意图;
图15是本实用新型之实施例中第二送出机械手的结构示意图;
图16是图15的第一分解结构示意图;
图17是图15的第二分解结构示意图。
附图标识说明:
1、振动盘安装架 2、检测台
3、连接器外壳 4、显示器
10、振动盘 20、振动送料通道
21、支撑台
30、推料机构 31、推料座
311、缺口 32、推料通道
33、推料气缸 331、推动滑块
332、限位槽 34、盖板
35、气缸座
40、上料机械手
50、检测机构 51、检测座
511、底板 512、侧板
513、顶板 52、插孔
53、通孔
60、第一送出机械手 61、升降手臂
611、第一电机 612、连接座
613、纵向滑块 614、电机连接部件
62、平移手臂 621、第二电机
622、滑座 623、水平滑块
624、水平滑槽 625、连接部
626、固定块 63、吸咀机构
631、吸咀安装座 632、吸咀
64、固定支架 641、纵向滑槽
70、良品送出通道
80、第二送出机械手 81、固定座
82、橫走手臂 821、气缸
822、连接座 823、第一滑座
824、横向滑块 825、横向滑槽
826、连接部 827、连接件
828、挡位
83、竖走手臂 831、驱动电机
832、第二滑座 833、竖向滑块
834、竖向滑槽 835、连接部
836、连接件 84、夹料机构
90、不良品收集箱
A、进料工位 B、吸取上料工位
C、检测工位 D、第一下料工位
E、第二下料工位。
具体实施方式
请参照图1至图4所示,其显示出了本实用新型之较佳实施例的具体结构,该连接器外壳引脚变形自动筛选机包括有振动盘安装架1、安装在振动盘安装架1上的振动盘10、振动送料通道20,该筛选机还包括有检测台2、安装于检测台2上的推料机构30、上料机械手40、检测机构50、第一送出机械手(即良品送出机械手)60、良品送出通道70、第二送出机械手(即不良品送出机械手)80、不良品收集箱90。该振动送料通道20搭在振动盘10及检测台2之间,在检测台2上具有进料工位A、吸取上料工位B、检测工位C、第一下料工位(即良品下料工位)D和第二下料工位(即不良品下料工位)E,该推料机构30、上料机械手40、检测机构50、第一送出机械手60、第二送出机械手80依连接器外壳3检测时的移动轨迹依次设置。对连接器外壳3引脚进行检测时,振动盘10在抖动时将连接器外壳3整齐地送到振动送料通道20末端的进料工位A上,推料机构30将连接器外壳3送到指定的吸取上料工位B,由上料机械手40将连接器外壳3送到检测工位C,用检测机构50对连接器外壳3的引脚进行检测,当各引脚质量良好无变形时,用第一送出机械手60吸至第一下料工位D,由良品送出通道70送出,当连接器外壳3引脚有变形时,用第二送出机械手80夹至第二下料工位E,放入到不良品收集箱90中。
其中,该振动盘安装架1位于检测台2的旁边,由于在工作状态时,振动盘安装架1抖动程度较大,而检测台2需要较高的平稳性,因此振动盘安装架1及检测台2不宜共同设为一个整体,最好分体设置,确保振动盘10在振动盘安装架1上抖动时不会影响检测台2上的各个机构,使各机构能较佳实现各自的性能。
本实施例中,该振动送料通道20的一端连接在振动盘10的侧边,另一端延伸至检测台2的进料工位A,该振动送料通道20的中部用一安装于振动盘安装架1的支撑台21撑起。由于振动盘10和振动送料通道20的结构是公知的,在此不再赘述。
如图5、6、7所示,所述推料机构30用于将振动盘10送来的连接器外壳3从进料工位A推至吸取上料工位B,以供上料机械手40吸取及传送。该推料机构30包括一推料座31、设在推料座31上的推料通道32以及一推料气缸33。该推料座31固定于检测台2上,该推料通道32与前述振动送料通道20垂直驳接,吸取上料工位B设在该推料通道32的前端。本实施例中,于推料座31的一侧设有使推料通道32与前述振动送料通道20相通的缺口311。该推料气缸33通过一气缸座35固定于检测台2上,推料气缸33的活塞杆连接有一块T字形的推动滑块331,推动滑块331安装于推料通道32中,且推动滑块331的前端具有一限位槽332,该限位槽332恰好能置入一个连接器外壳3,从而连接器外壳3置入到限位槽332中随推动滑块331一起送到吸取上料工位B上。除此之外,于该推料座31的顶部还设有一盖板34,用于压住推动滑块331及每个通过推料通道32的连接器外壳3,确保各连接器外壳3保持整齐输送、以及使推动滑块331被推动时只走直线,不会跑偏。
在连接器外壳3的送料过程中,该推料机构30的动作如下:各连接器外壳3源源不断地从左到右输送,由推料座31的缺口311送入到推料通道32中,当传感器检测到连接器外壳3位于进料工位A时(即置于推动滑块331前端的限位槽332内时),该推料气缸33便推动推动滑块331,由推动滑块331将连接器外壳3由进料工位A送至吸取上料工位B。该限位槽332来回活动于进料工位A与吸取上料工位B之间,由于限位槽332夹住连接器外壳3对其进行限位,使连接器外壳3的输送平稳不会不晃动,输送位置精确,不存在跑偏现象。
如图8、9、10所示,所述上料机械手40和第一送出机械手60共用一个固定支架64,该固定支架64固定在检测台2上,固定支架64的右侧及后侧均设有纵向滑槽641。该上料机械手40安装于固定支架64的后侧的纵向滑槽641中,其可以向上、向下、向左、向右移动,以将吸取上料工位B的连接器外壳3送到检测工位C上进行检测。所述第一送出机械手60安装于固定支架64的右侧的纵向滑槽641中,其可以向上、向下、向前、向后移动,当连接器外壳3的引脚无变形时,该第一送出机械手60将检测工位C的连接器外壳3送到第一下料工位D送出。
本实施例中,上料机械手40和第一送出机械手60的结构基本相同,只是安装位置不同而用于不同的生产工序,在此,仅以第一送出机械手60为例进行具体结构的说明,而上料机械手40的结构不再赘述。
如图11、12所示,所述第一送出机械手60包括升降手臂61、平移手臂62以及吸咀机构63。
该升降手臂61包括第一电机611、连接座612、纵向滑块613以及前述纵向滑槽641;该第一电机611固定安装于固定支架64顶部的T字形的固定平台上,该纵向滑块613可滑动地安装于纵向滑槽641内,且纵向滑块613的背面固定于连接座612上,该连接座612顶部有一电机连接部件614,用于与伸出固定平台底部的电机主轴连接;籍此,第一电机611驱动连接座612上升或下降动作,进而带动纵向滑块613在纵向滑槽641中上、下滑动。
所述平移手臂62包括第二电机621、滑座622、水平滑块623以及水平滑槽624;该水平滑块623设在连接座612背向纵向滑块613的侧面上,该水平滑槽624设置在滑座622上,且该滑座622上还设有一用于连接第二电机621的连接部625。所述第二电机621通过一固定块626固装于前述连接座612的端部,该第二电机621的主轴与连接部625相接;籍此,第二电机621驱动滑座622平移,带动水平滑槽624在水平滑块623上前、后平移。
所述吸咀机构63包括吸咀安装座631以及连接于吸咀安装座631中的吸咀632,该吸咀安装座631固定于滑座622上,本实施例中吸咀632的数量为两个,两个吸咀632能够吸住电连接器外壳3的顶部,并保证吸力的平衡。
本实施例中,该连接座612、电机连接部件614、水平滑块623、纵向滑块613以及固定块626是分体组装而成,然而,也可以做成一体成型连接结构。另外,本实施例的滑座622与吸咀安装座631也可以是一体成型结构,不以此为限。
本第一送出机械手60的工作原理如下:当检测机构50的传感器检测到连接器外壳3的引脚均无变形时,该第一送出机械手60的第一电机611启动,第一电机611的主轴作用于升降手臂61,当升降手臂61上升或下降时,则平移手臂62以及吸咀机构63同步上升或下降。该升降手臂61上升或下降的距离值用程序设定,待升降手臂61到达设定值时,由第二电机621驱动平移手臂62进行平移,当平移手臂62向前或向后平移时,该吸咀机构63同步向前或向后移动。当吸咀632到达检测工位C,即可将引脚无变形的连接器外壳3吸住,然后移到第一下料工位D,再释放连接器外壳3,完成释放后,该第一送出机械手60回到原始状态,等待下一次动作。当然,第一送出机械手60的升降手臂61与平移手臂62也可以同步动作,亦即是在上升的同时进行前移或后移,或者在下降的同时进行前移或后移,具体控制方式根据程序设定来动作。
如图13和图14所示,所述检测机构50固定于检测台2上。该检测机构50包括一检测座51以及一安装于检测座51上的红外线探头,该检测座51包括一底板511、两侧板512以及一顶板513,该顶板513上设有数个插孔52,供连接器外壳3的引脚插入进行检测。另外,该顶板513上还设有一通孔53,用于安装线外线探头;本实施例中,该通孔53位于各插孔53之间围成的中心位置。若连接器外壳3的引脚能顺利插入到对应的插孔52内,挡住通孔53内的红外线探头时,那么说明该连接器外壳3的各引脚是无变形的,即为良品,相反为不良品。良品被第一送出机械手60吸到良品送出通道70,不良品被第二送出机械手80夹至不良品收集箱90中。
如图15至17所示,所述第二送出机械手80可以实现左、右、上、下移动,以将不良品夹到不良品收集箱90中。该第二送出机械手80包括一固定座81、橫走手臂82、竖走手臂83和夹料机构84。
该固定座81固装于检测台2上。
该橫走手臂82包括气缸821、连接座822、第一滑座823、横向滑块824以及横向滑槽825,该横向滑块824直接设在固定座81的顶部,且在横向滑块824的两端设有挡位828,用于挡住横向滑槽825,使之限定在横向滑块824内滑动;该横向滑槽825设在第一滑座823上,横向滑槽825嵌在横向滑块824中,该连接座822固装于第一滑座823上,连接座822的下端设有一连接部826,用于与气缸821的活塞杆连接;该气缸821通过一连接件827固装于固定座81上,该气缸821的活塞杆接在连接座822的连接部826上,籍此,由活塞杆驱动连接座822横向动作,带动横向滑槽825在横向滑块824上移动。
所述竖走手臂83包括驱动电机831、第二滑座832、竖向滑块833以及竖向滑槽834,该竖向滑块833设在第一滑座823背向连接座822的一侧面上,该竖向滑槽834设在第二滑座832上,竖向滑槽834可上下滑动地嵌于竖向滑块833中;于第二滑座832上设有一连接部835,驱动电机831通过连接件836固定于连接座822的顶部,驱动电机831的主轴连接第二滑座832的连接部835,籍此,由驱动电机831驱动第二滑座832上下动作,带动竖向滑槽834在竖向滑块833中移动。
所述夹料机构84安装于第二滑座832上,该夹料机构84用于夹住引脚不符合规格的连接器外壳3,将其由检测工位C夹住送到第二下料工位E上,再松开,使不良品连接器外壳3装入到不良品收集箱90内。
除此之外,该连接器外壳引脚变形自动筛选机还包括有一电控系统以及一显示器4,电控系统与各机构连接。当检测装置的线外线传感器检测到连接器外壳3的各引脚插入到插孔52内时,即为良品,由电控系统控制而使第一送出机械手60启动,将连接器外壳3吸到良品送出通道70;当连接器外壳3的各引脚因变形而无法插入到插孔52时,即为不良品,红外线传感器无法感应到连接器外壳3,此时,由电控系统控制而使第二送出机械手80启动,将连接器外壳3夹至第二下料工位E。所述显示器4用于显示检测状态、良品、不良品的数量及比例数据等。
综上所述,本实用新型的设计重点在于,本装置能准确快速地识别连接器外壳引脚是否存在变形,并对有缺陷的产品和良品进行分类,能够取代传统采用人眼观察和判断的工序,从而避免人眼判断的诸多不足,而且全程自动化,操作方便,大大降低劳动强度,不仅提高了检测效率和准确性,而且检测速度快,有效缩短产品生产周期,降低成本,大大提高了生产效率与产品合格率,增强企业的竞争力。
以上所述,仅是本实用新型的较佳实施例而已,并非对本实用新型的技术范围作任何限制,故凡是依据本实用新型的技术实质对以上实施例所作的任何细微修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
Claims (10)
1.一种连接器外壳引脚变形自动筛选机,其特征在于:包括
一振动盘安装架;
一振动盘,固装于振动盘安装架上;
一振动送料通道,连接于振动盘;
一检测台,位于振动盘安装架的旁边,该检测台针对送料轨迹依次设有进料工位、吸取上料工位、检测工位、第一下料工位和第二下料工位;
一用于将连接器外壳从进料工位送至吸取上料工位的推料机构,安装于检测台上且对应进料工位,该推料机构包括推料气缸、推动滑块和推料通道,该推料通道与前述振动送料通道驳接,该推动滑块连接于推料气缸的活塞杆并可活动地伸入到推料通道中,推动滑块的头端设有一用于卡住连接器外壳并来回滑动于进料工位和吸取上料工位之间的限位槽;
一上料机械手,安装于检测台上且对应吸取上料工位,该上料机械手包括由两电机驱动而移动的机械手臂、以及用于将连接器外壳从吸取上料工位送至检测工位的吸咀机构,该吸咀机构连接于机械手臂的末端;
一检测机构,安装于检测台上且对应检测工位,该检测机构包括检测座和用于检测连接器外壳是否良品的红外线探头,该检测座上设有供连接器外壳之引脚插入的插孔,且检测座上还设有可被连接器外壳遮挡的通孔,该红外线探头安装于通孔中;
一用于良品下料的第一送出机械手,安装于检测台上且对应第一下料工位,该第一送出机械手包括由两电机驱动而移动的机械手臂、以及用于将连接器外壳从检测工位送至第一下料工位的吸咀机构,该吸咀机构连接于机械手臂的末端;
一用于不良品下料的第二送出机械手,安装于检测台上且对应第二下料工位,该第二送出机械手包括由气缸及电机驱动而移动的机械手臂、以及用于将不及格的连接器外壳送至第二下料工位的夹料机构,该夹料机构连接于机械手臂的末端。
2.根据权利要求1所述的连接器外壳引脚变形自动筛选机,其特征在于:所述推料通道设在一个固定于检测台的推料座上,该推料通道与振动送料通道垂直驳接,于推料座上设有一个连通推料通道与振动送料通道的缺口,于该推料座的顶部还设有一压住推动滑块的盖板。
3.根据权利要求1所述的连接器外壳引脚变形自动筛选机,其特征在于:所述上料机械手和第一送出机械手安装在同一个固定支架上,且上料机械手和第一送出机械手的结构相同。
4.根据权利要求3所述的连接器外壳引脚变形自动筛选机,其特征在于:所述第一送出机械手的机械手臂包括升降手臂和平移手臂,所述吸咀机构包括吸咀安装座以及连接于吸咀安装座中的吸咀,该吸咀安装座固定于平移手臂上。
5.根据权利要求4所述的连接器外壳引脚变形自动筛选机,其特征在于:该升降手臂包括第一电机、连接座、纵向滑块以及纵向滑槽,该第一电机固装于固定支架,第一电机的主轴接连接座,该纵向滑槽设在固定支架上,该纵向滑块固定于连接座并可上下活动地卡合于纵向滑槽。
6.根据权利要求5所述的连接器外壳引脚变形自动筛选机,其特征在于:所述平移手臂包括第二电机、滑座、水平滑块以及水平滑槽,该第二电机固定于连接座,第二电机的主轴接滑座,该水平滑块固定于连接座,该水平滑槽设在滑座上并可前后活动地卡合于水平滑块。
7.根据权利要求1所述的连接器外壳引脚变形自动筛选机,其特征在于:所述检测座包括一底板、两侧板以及一顶板,各插孔设在顶板上,通孔位于各插孔之间围成的中心位置。
8.根据权利要求1所述的连接器外壳引脚变形自动筛选机,其特征在于:所述第二送出机械手的机械手臂包括橫走手臂和竖走手臂,橫走手臂和竖走手臂架设在一固定座上,该夹料机构连接于竖走手臂上。
9.根据权利要求8所述的连接器外壳引脚变形自动筛选机,其特征在于:所述橫走手臂包括气缸、连接座、第一滑座、横向滑块以及横向滑槽,该气缸固装于固定座上,气缸的活塞杆接连接座,连接座固定于第一滑座,该横向滑块直接形成于固定座的顶部,该横向滑槽设在第一滑座上并可左右滑动地扣合于横向滑块上。
10.根据权利要求9所述的连接器外壳引脚变形自动筛选机,其特征在于:所述竖走手臂包括驱动电机、第二滑座、竖向滑块以及竖向滑槽,该驱动电机固定于连接座,驱动电机的主轴连接于第二滑座,该竖向滑块设在第一滑座上,该竖向滑槽设在第二滑座上并可上下移动地扣合于纵向滑块上。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201220637634 CN203044362U (zh) | 2012-11-28 | 2012-11-28 | 连接器外壳引脚变形自动筛选机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201220637634 CN203044362U (zh) | 2012-11-28 | 2012-11-28 | 连接器外壳引脚变形自动筛选机 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN203044362U true CN203044362U (zh) | 2013-07-10 |
Family
ID=48727360
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN 201220637634 Withdrawn - After Issue CN203044362U (zh) | 2012-11-28 | 2012-11-28 | 连接器外壳引脚变形自动筛选机 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN203044362U (zh) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103041995A (zh) * | 2012-11-28 | 2013-04-17 | 东莞市凯昶德电子科技股份有限公司 | 连接器外壳引脚变形自动筛选机 |
| CN104466607A (zh) * | 2013-09-22 | 2015-03-25 | 江苏唐音光电有限公司 | 一种适配器用压接机 |
| CN104476360A (zh) * | 2014-12-10 | 2015-04-01 | 东莞市瀛通电线有限公司 | 插针自动打磨方法及打磨机 |
| CN104841648A (zh) * | 2014-02-18 | 2015-08-19 | 苏州瑞本工业炉有限公司 | 碳刷电阻测试机 |
| CN105618390A (zh) * | 2015-06-26 | 2016-06-01 | 宁波职业技术学院 | 小型五金零件影像分检机 |
| CN106041471A (zh) * | 2016-08-11 | 2016-10-26 | 苏州市吴中区胥口健浩五金加工厂 | 电磁阀膜片组装机的橡胶圈供料装置 |
| CN106141653A (zh) * | 2016-08-11 | 2016-11-23 | 苏州市吴中区胥口健浩五金加工厂 | 电磁阀膜片组装机的橡胶圈上料机构 |
| CN108091480A (zh) * | 2017-12-19 | 2018-05-29 | 乐清市渝丰自动化设备有限公司 | 全自动插片机 |
| CN109283185A (zh) * | 2018-09-20 | 2019-01-29 | 宁波研新工业科技有限公司 | 一种压缩机保护器的引脚检测设备 |
| CN110052424A (zh) * | 2019-05-20 | 2019-07-26 | 苏州富强科技有限公司 | 一种同步转移式检测及分装流水线 |
| CN110732488A (zh) * | 2019-10-26 | 2020-01-31 | 东莞市旺佳五金制品有限公司 | 一种五金连接器的自动检测筛分系统 |
| CN112770247A (zh) * | 2021-02-07 | 2021-05-07 | 深圳市鸿南电子有限公司 | 麦克风灵敏度自动校准装置及方法 |
| CN114654041A (zh) * | 2022-04-22 | 2022-06-24 | 明光市锐创电气有限公司 | 一种小型变压器上料组件及其焊锡加工生产线 |
-
2012
- 2012-11-28 CN CN 201220637634 patent/CN203044362U/zh not_active Withdrawn - After Issue
Cited By (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103041995B (zh) * | 2012-11-28 | 2014-07-16 | 东莞市凯昶德电子科技股份有限公司 | 连接器外壳引脚变形自动筛选机 |
| CN103041995A (zh) * | 2012-11-28 | 2013-04-17 | 东莞市凯昶德电子科技股份有限公司 | 连接器外壳引脚变形自动筛选机 |
| CN104466607A (zh) * | 2013-09-22 | 2015-03-25 | 江苏唐音光电有限公司 | 一种适配器用压接机 |
| CN104841648A (zh) * | 2014-02-18 | 2015-08-19 | 苏州瑞本工业炉有限公司 | 碳刷电阻测试机 |
| CN104841648B (zh) * | 2014-02-18 | 2017-08-25 | 苏州瑞本智能科技有限公司 | 碳刷电阻测试机 |
| CN104476360B (zh) * | 2014-12-10 | 2017-01-11 | 东莞市瀛通电线有限公司 | 插针自动打磨方法及打磨机 |
| CN104476360A (zh) * | 2014-12-10 | 2015-04-01 | 东莞市瀛通电线有限公司 | 插针自动打磨方法及打磨机 |
| CN105618390B (zh) * | 2015-06-26 | 2017-11-24 | 宁波职业技术学院 | 小型五金零件影像分检机 |
| CN105618390A (zh) * | 2015-06-26 | 2016-06-01 | 宁波职业技术学院 | 小型五金零件影像分检机 |
| CN106141653A (zh) * | 2016-08-11 | 2016-11-23 | 苏州市吴中区胥口健浩五金加工厂 | 电磁阀膜片组装机的橡胶圈上料机构 |
| CN106041471A (zh) * | 2016-08-11 | 2016-10-26 | 苏州市吴中区胥口健浩五金加工厂 | 电磁阀膜片组装机的橡胶圈供料装置 |
| CN106041471B (zh) * | 2016-08-11 | 2018-06-12 | 泉州市银辉工业设计有限公司 | 电磁阀膜片组装机的橡胶圈供料装置 |
| CN106141653B (zh) * | 2016-08-11 | 2018-08-03 | 芜湖航天特种电缆厂股份有限公司 | 电磁阀膜片组装机的橡胶圈上料机构 |
| CN108091480A (zh) * | 2017-12-19 | 2018-05-29 | 乐清市渝丰自动化设备有限公司 | 全自动插片机 |
| CN109283185A (zh) * | 2018-09-20 | 2019-01-29 | 宁波研新工业科技有限公司 | 一种压缩机保护器的引脚检测设备 |
| CN109283185B (zh) * | 2018-09-20 | 2023-09-05 | 宁波研新工业科技有限公司 | 一种压缩机保护器的引脚检测设备 |
| CN110052424A (zh) * | 2019-05-20 | 2019-07-26 | 苏州富强科技有限公司 | 一种同步转移式检测及分装流水线 |
| CN110732488A (zh) * | 2019-10-26 | 2020-01-31 | 东莞市旺佳五金制品有限公司 | 一种五金连接器的自动检测筛分系统 |
| CN112770247A (zh) * | 2021-02-07 | 2021-05-07 | 深圳市鸿南电子有限公司 | 麦克风灵敏度自动校准装置及方法 |
| CN112770247B (zh) * | 2021-02-07 | 2022-04-01 | 深圳市鸿南电子有限公司 | 麦克风灵敏度自动校准装置及方法 |
| CN114654041A (zh) * | 2022-04-22 | 2022-06-24 | 明光市锐创电气有限公司 | 一种小型变压器上料组件及其焊锡加工生产线 |
| CN114654041B (zh) * | 2022-04-22 | 2023-10-20 | 青岛晶石电子有限公司 | 一种小型变压器上料组件及其焊锡加工生产线 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN203044362U (zh) | 连接器外壳引脚变形自动筛选机 | |
| CN103041995B (zh) | 连接器外壳引脚变形自动筛选机 | |
| CN203218683U (zh) | 连接器组装及检测生产线 | |
| CN109366167B (zh) | 一种五金塑胶件组装机 | |
| CN203103729U (zh) | 连接器外壳与胶芯自动化组装设备 | |
| CN108283192A (zh) | 一种全自动饼片脱模装置 | |
| CN207473042U (zh) | 指纹模组测试设备及其测试头结构 | |
| CN110233408B (zh) | 一种智能制造type-c插头的生产设备 | |
| CN205942172U (zh) | 一种显示屏检测机的定位装置及显示屏检测机 | |
| CN109596193B (zh) | 一种计量表自动测试设备 | |
| CN107654455B (zh) | 一种定位组装压合机 | |
| CN212049115U (zh) | 一种排母连接器检测用输送装置 | |
| CN116539933B (zh) | 一种用于无线充电器测试的探针模组运动机构 | |
| CN210553081U (zh) | 一种贴合机 | |
| CN208272336U (zh) | 一种自动收集不良品的自动插针机 | |
| CN205043427U (zh) | 防水盲堵自动插入设备 | |
| CN207516530U (zh) | 一种专变采集终端的自动校验装置 | |
| CN207483915U (zh) | 一种基于真空吸盘的蚕茧分离计数装置 | |
| CN210572596U (zh) | 一种软性线路板检测测试夹具装置 | |
| CN114705895A (zh) | 一种用于电源适配器寿命测试装置及其方法 | |
| CN107779960A (zh) | 一种基于真空吸盘的蚕茧分离计数装置及其使用方法 | |
| CN209027764U (zh) | 电子烟雾化器的自动视觉检测装置 | |
| CN209125225U (zh) | 一种膨胀挡板胶钉安装装置 | |
| CN208098652U (zh) | 一种空调压缩机线圈自动化测试装置 | |
| CN205679737U (zh) | 一种主板联测机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| AV01 | Patent right actively abandoned |
Granted publication date: 20130710 Effective date of abandoning: 20140716 |
|
| RGAV | Abandon patent right to avoid regrant |