CN1432786A - 射击误差的补偿方法和装置以及武器系统的系统计算机 - Google Patents
射击误差的补偿方法和装置以及武器系统的系统计算机 Download PDFInfo
- Publication number
- CN1432786A CN1432786A CN03102737A CN03102737A CN1432786A CN 1432786 A CN1432786 A CN 1432786A CN 03102737 A CN03102737 A CN 03102737A CN 03102737 A CN03102737 A CN 03102737A CN 1432786 A CN1432786 A CN 1432786A
- Authority
- CN
- China
- Prior art keywords
- error
- weapon
- value
- gun barrel
- gun
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 50
- 238000005259 measurement Methods 0.000 claims abstract description 77
- 238000012937 correction Methods 0.000 claims abstract description 45
- 230000003068 static effect Effects 0.000 claims abstract description 14
- 238000010304 firing Methods 0.000 claims description 21
- 230000008569 process Effects 0.000 claims description 4
- 230000003287 optical effect Effects 0.000 claims description 3
- 230000005622 photoelectricity Effects 0.000 claims 4
- 230000001360 synchronised effect Effects 0.000 claims 3
- 238000010618 wire wrap Methods 0.000 claims 2
- 238000007620 mathematical function Methods 0.000 description 21
- 208000004350 Strabismus Diseases 0.000 description 15
- 230000033001 locomotion Effects 0.000 description 10
- 230000008859 change Effects 0.000 description 9
- 238000004458 analytical method Methods 0.000 description 6
- 238000012067 mathematical method Methods 0.000 description 6
- 230000008901 benefit Effects 0.000 description 5
- 230000007423 decrease Effects 0.000 description 5
- 230000005693 optoelectronics Effects 0.000 description 5
- 238000004364 calculation method Methods 0.000 description 4
- 239000000835 fiber Substances 0.000 description 3
- 230000005484 gravity Effects 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 230000033228 biological regulation Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000009472 formulation Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000013208 measuring procedure Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000005728 strengthening Methods 0.000 description 1
- 230000009897 systematic effect Effects 0.000 description 1
Images

Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41G—WEAPON SIGHTS; AIMING
- F41G3/00—Aiming or laying means
- F41G3/32—Devices for testing or checking
- F41G3/323—Devices for testing or checking for checking the angle between the muzzle axis of the gun and a reference axis, e.g. the axis of the associated sighting device
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41A—FUNCTIONAL FEATURES OR DETAILS COMMON TO BOTH SMALLARMS AND ORDNANCE, e.g. CANNONS; MOUNTINGS FOR SMALLARMS OR ORDNANCE
- F41A27/00—Gun mountings permitting traversing or elevating movement, e.g. gun carriages
- F41A27/30—Stabilisation or compensation systems, e.g. compensating for barrel weight or wind force on the barrel
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41G—WEAPON SIGHTS; AIMING
- F41G5/00—Elevating or traversing control systems for guns
- F41G5/26—Apparatus for testing or checking
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Aiming, Guidance, Guns With A Light Source, Armor, Camouflage, And Targets (AREA)
- Gyroscopes (AREA)
- Fire Alarms (AREA)
- Arrangements For Transmission Of Measured Signals (AREA)
- Radar Systems Or Details Thereof (AREA)
- Organic Low-Molecular-Weight Compounds And Preparation Thereof (AREA)
- Closed-Circuit Television Systems (AREA)
Abstract
本发明有关一种具有武器枪炮管(10.2)的枪炮的射击误差补偿方法及装置(20)。为此,使武器枪炮管(10.2)绕轴转动逐步转至测量位置。用测量设备的适当装置测定每个测量位置的预定值,即描述武器枪炮管(10.2)的预定位置及实际值,即描述武器枪炮管(10.2)的实际位置。然后,计算实际值和预定值之差作为误差值。由测量位置的多个误差值确定修正值,用作在武器枪炮管(10.2)随后瞄准时考虑。把该方法和装置(20)应用在一武器系统中,该系统装有系统计算机(10.4),其用于计算武器系统(10)中枪炮(10.1)的武器枪炮管(10.2)瞄准所用的瞄准值;系统计算机(10.4)具有用于输入数据的数据输入(24),在计算瞄准值时要考虑这些数据,以补偿由静态枪炮几何误差引起并影响武器枪炮管(10.2)位置的射击瞄准误差。
Description
(1)技术领域
本发明涉及一种武器系统中具有武器枪炮管的枪炮射击误差补偿方法和装置,该射击误差由静态枪炮几何误差所引起;以及涉及一种用于武器系统的系统计算机。
(2)背景技术
枪炮包括许多相互以刚性或活动地连接的单个零件。这些单个零件的尺寸精度不可能制造得很精确,而是与理论上确定的尺寸相比具有一定的制造公差和/或偏差,在组装时又产生与相互间的预定位置偏离的固定组装公差。总偏差导致每支枪炮跟理想几何形状有一定的偏差,称之为枪炮几何误差。这样一些枪炮几何误差由很多种误差组成。例如,枪炮几何误差表现为,如枪炮方位角显示器显示那样,武器枪炮管在零位时的方位角α实际上不等于0°,而是略微偏离0°一个角度Δα。同样,由枪炮仰角显示器显示,武器枪炮管在零位时的仰角λ也不等于0°,而是略微偏离0°一个角度Δλ。在某些情况下,Δα和Δλ可能等于0,但这种情况只是在不同的枪炮几何误差作出互相补偿时发生。
如果一种系列枪炮的相同零件是用不耐磨或可准确调整的工具以及在相同外部条件下,如温度条件,并在相同的机器上制造的话,其制造公差可能相等或接近相等。然而,在组装后,枪炮几何误差每一件均不相同。
问题更为严重的是枪炮几何误差,特别是角误差并不是恒定不变的,而是随不同因素而改变。对于活动的单个零件,这样一些变化主要由磨损造成;因此误差随着时间而增大。但误差的改变也与所在的环境条件有关,如空气和枪炮的温度;因此它们可能时而增大,时而减少。
另一个难题是枪炮几何误差也受单个零件的各自位置影响,因为单个零件的机械载荷,所以其变形部分取决于位置。
最后,武器枪炮管在特定位置及在特定时间所表现出来的枪炮几何误差也可能是旋转方向的函数,武器枪炮管绕该方向转到该特定位置。
不同的枪炮有不同的枪炮几何误差,所以几何误差表示实际的枪炮参数。射击误差和/或枪炮精确性的减少都是枪炮几何误差,特别是角误差造成的。因为武器枪炮管的枪炮口和自武器枪炮管射出子弹击中的目标之间相距很远,所以即使武器枪炮管只偏离很小角度,也会使子弹与射击目标偏离很远。
若已知枪炮几何误差和/或枪炮参数,那么可对它们引起的射击误差进行补偿,其中除了在确定瞄准值时由该枪炮指定的计算机软件提供的其他数据之外,可考虑枪炮参数。指定给枪炮的计算机的概念应理解为表示枪炮计算机和/或射击控制装置的计算机。计算机考虑的其他数据主要包括描述目标的位置和移动的目标数据、描述不同气象条件的气象数据、涉及实际初速与理论确定初速之差的n0数据,以及可能还包括子弹数据,其表征射击用的各种子弹。
在枪炮射击前要确定枪炮几何误差和/或枪炮参数,对它们进行评估以获取修正函数,并在计算机软件中补充该修正函数,而且,每支枪炮都要独立地进行这样的确定。
测量枪炮参数的已有方法存在许多缺点。已有方法不能测量所有类型的枪炮参数。测量也不能自动进行,所以很费时;其结果使武器枪炮管在每个测量位置只能进行几次测量,故不能消除随机测量误差。这样的测量不仅费时,而且需要大量的人力,以致测量非常昂贵。此外,一些测量人员必须位于武器枪炮管的枪炮口区进行测量工作,因而相当危险;要测量仰角大和武器枪炮管长的枪炮,测量人员必须用升降设备升到武器枪炮管的枪炮口区或在梯架上才能测量。
(3)发明内容
所以,本发明的目的是:
·提出现有技术存在的一类射击误差的补偿方法,该方法只需很少人力,优选为自动进行,就可以全面测定枪炮几何误差,而且测量准确、快速;
·提出一种实施这种方法的装置;以及
·提出一种用于武器系统,与新装置联接的射击调节计算机和/或系统计算机。
根据本发明一方面,提供一种具有武器枪炮管的枪炮的射击误差补偿方法,所述射击误差由静态枪炮几何误差引起,并影响武器枪炮管以瞄准值瞄准时武器枪炮管的位置,其特点是:所述方法包括以下步骤:使武器枪炮管绕轴转动逐步转到测量位置;在每个测量位置测定:描述武器枪炮管预定位置的预定值及描述武器枪炮管实际位置的实际值;计算实际值和预定值之差作为误差值;由多个误差值确定修正值,以及在武器枪炮管随后瞄准时考虑该修正值以作为射击误差补偿值。
根据本发明另一方面,提供一种具有武器枪炮管的枪炮的射击误差补偿装置,所述射击误差由静态枪炮几何误差引起,并影响武器枪炮管以瞄准值瞄准时武器枪炮管的位置,其特点是:所述装置具有测量设备,其确定描述武器枪炮管实际位置的实际值,所述测量设备具有设于武器枪炮管上的光电陀螺测量系统,其具有第一测量元件,既可以测定方位角同步误差,又可以测定垂直偏移误差。
根据本发明又一方面,提供一种武器系统的系统计算机,其用于计算武器系统中枪炮的武器枪炮管瞄准所用的瞄准值,其特点是:系统计算机具有输入数据的数据输入端,在计算瞄准值时考虑这些数据,以补偿由静态枪炮几何误差引起并影响武器枪炮管位置的瞄准误差。
本发明的主要优点如下:
·所有由静态枪炮几何误差引起的角误差均可检测到,因而可进行补偿。
·到目前为止耗费巨大也只能作粗略测定的静态枪炮几何误差,现在都可以被准确地测定,并有效地作出相应补偿。
·使用陀螺测量系统不必象过去那样调准武器的水平就可以准确测定角度。
·使用光电陀螺仪,特别是光纤陀螺仪测定角度,其精度、可靠性及再现性都大大超过现有进行的测量,而且比现有所得到的测量结果更加详尽;这样,可以更加准确地对枪炮几何引起的射击误差进行补偿。
·可快速和自动进行测量;测量枪炮所需的时间和人力都很少,因而费用显着下降。
·测量人员发生事故的危险性大大降低。
在对本发明详细叙述之前,先解释几个基本概念。
虽然以下只详细叙述了方位角同步误差、仰角同步误差、垂直偏移误差、摆动误差、斜视误差及其补偿,但本发明的基本概念适用于所有产生的枪炮几何误差。
通过前后旋转或全转动可使武器枪炮管处于不同的位置,枪炮几何误差影响武器枪炮管的位置,每个位置由相应的方位角,即相应横向角,及相应的仰角,即相应垂直角,限定。绕竖轴转动改变方位角,绕横轴转动改变仰角。竖轴和横轴是空间,最好是正交轴系统的两根轴,这些轴的定义见表1。在本说明书中,方位角是指在射击时偏离零位而非偏离正北方向。
表1
轴的定义
Λ轴
横 水平轴(理论上的),武器枪炮管绕该轴转动;由此设定轴 仰角λ
A 轴
竖 垂直轴(理论上的),武器枪炮管绕该轴转动;由此设定轴 方位角α
R 轴
纵 武器枪炮管在栓系位置的水平轴(理论上的),该位置的轴 方位角α=0和仰角λ=0
由于武器枪炮管的实际位置不等于其预定位置,故而产生射击误差。预定位置除了其他许多东西之外还由射击调节计算机和/或系统计算机确定的方位角和仰角的数值界定,但不能由于静态枪炮几何误差假定。表2列出武器枪炮管产生的位置角误差、导致角误差的枪炮几何误差、及产生枪炮几何误差的主要原因。角误差表现为方位角误差和仰角误差,其包括下列五种误差,但它们之间并不是没有关连的:
(1)方位角同步误差Δα1
(2)摆动误差Δτ
(3)仰角同步误差Δλ
(4)垂直偏移误差Δα2
(5)斜视误差Δσ
表2
武器枪炮管的位置角误差、枪炮几何误差及其原因
| 角误差 | 枪炮几何误差 | 原因 |
| 方位角误差(横向误差) | Δα1方位角同步误差 | 1.横向中心支承偏心2.横向中心支承不圆3.横向转动件的冠形齿轮的齿距发生改变4.编码误差 |
| Δα2垂直偏移误差 | 5.仰角轴线相对水平线倾斜6.枪炮管轴线与仰角轴线不垂直 | |
| Δσ斜视误差 | 7.枪炮管轴线与视线不平行 | |
| 仰角误差(垂直误差) | Δλ仰角同步误差 | 8.垂直向中心支承偏心9.垂直向中心支承不圆10.垂直转动件的冠形齿轮的齿距发生改变11.编码误差12.枪炮随仰角增大而向后仰 |
| Δτ | 13.结构的弹性变形 | |
| Δσ斜视误差 | 14.枪炮管轴线与视线不平行 |
为了测定这些局部误差,需进行多次测量。一个有效步骤最好是在三个测量步骤中进行测量,这是因为在武器枪炮管的每个位置中,所进行的测量涉及不止一种误差。表3列出三个测量步骤、局部误差及各自所用的测量装置。
表3
角误差、测量步骤及测量装置
| 测量步骤 | 涉及的局部误差 | 测量装置 | |
| 1 | 方位角同步误差摆动误差 | Δα1Δτ | 陀螺测量装置气泡水准仪 |
| 2 | 仰角同步误差垂直偏移误差 | ΔλΔα2 | 陀螺测量装置陀螺测量装置 |
| 3 | 斜视误差 | Δσ | 光学装置(目标望远镜) |
为了补偿基于枪炮的静态枪炮几何误差所引起的射击误差,一般步骤是这样的:确定武器枪炮管绕其中一根旋转轴转动时产生的角误差。通过沿一个旋转方向绕上述旋转轴转动,依次经多个测量位置,武器枪炮管从零位逐步转到最终位置,这也是测量位置。由计算机控制其转动。利用测量设备的适当测量元件确定每步之后武器枪炮管旋转的实际角度;这个角度称为实际值。同时,确定每步之后武器枪炮管将诸如根据枪炮比例或指定的射击调节计算机和/或系统计算机的数据旋转的理论角度;这个角度称为预定值。然后,计算每个测量位置的预定值和实际值之间的角度差;该差值称为误差值。由误差值确定在射击调节计算机和/或系统计算机的软件要执行的修正值,接着考虑确定瞄准值,即方位角和仰角的数值。计算瞄准值主要用的是目标数据,即描述射击目标的位置和可能移动的数据,及子弹数据。用本发明的方法对上述计算加以修正。
确切地说,实际值可表示为预定值的函数,以确定修正值,并以由此可确定修正值的方式可以制定实际值。这样一种制定,其中修正值由测定的角误差算出,可利用数字和/或绘制表格或通过数学运算,或把数字和数学运算相给合而进行。
在数字方法中,把数值对储存在表格中,第一数值是预定值,第二数值是实际值或每对数值对的实际值和预定值之差。也可以把数值对作成经验误差曲线。这样,在计算瞄准值时可制定表格和/或经验误差曲线。然后,以这样的方式即考虑到表格和/或经验误差曲线的对应值再以修正方式计算每一瞄准值。
在数学方法中,首先把表格中的误差值表示成预定角度的函数和/或一经验误差曲线,再以至少一个数学函数近似表示;即经验误差曲线在其全程内以单个误差数学函数表示,或者经验误差曲线的每一段以一局部误差数学函数表示,整个则以多个局部误差数学函数表示。然后,把所得的误差数学函数输入计算机,由此确定修正函数,在计算武器枪炮管的瞄准值,即方位角和仰角时要考虑该修正函数。
数字方法的设计应确保补偿射击误差所必需的精度。然而,如以下所述,数学方法的优点是可对误差数学函数进行简单的分析,特别是利用已知数学方法;不但由其可以得到补偿射击误差的数值,而且可了解个别结构条件对误差函数的影响;在最后分析中可知,由其得到的结构上的改进由于消除了枪炮几何误差而从根本上消除因枪炮几何而产生射击误差。结构概念既涉及概念性条件,又涉及制造和组装条件。
为了消除随机测量误差,最好重复一次或多次上述的测量步骤,以及使表格的数值取平均值。另外,由所有同样所做的测量步骤可以形成平均经验误差曲线,或者由每条经验误差曲线可形成一误差数学函数,以及由这些函数可形成平均误差数学函数,或由每条经验误差曲线可形成一修正函数,以及由所有修正函数可形成平均修正函数。
对于上述测量,武器枪炮管始终在同一个旋转方向转动;这样得到的误差值是单向确定的误差值,可用数字或数学方法算出。具体地说,经验误差曲线和/或误差数学函数是单向确定和/或单向误差曲线和/或误差函数。然而,如上所述,除了其他许多东西外,通常误差值还是武器枪炮管转动时旋转方向的函数。因此,它的优点在于可进行两次测量。为此,使武器枪炮管绕同一根转轴转动,沿一个方向进行第一次测量,沿相反方向进行第二次测量。沿第一方向旋转的测量位置与沿第二方向旋转的测量位置可以一致,也可以不一致。在旋转期间,确定第一方向和第二方向的误差值。如果第一方向和第二方向的误差值相差很小,那么可确定与方向无关的误差值,并作进一步的计算和分析。具体地说,由第一方向经验误差曲线和第二方向经验误差曲线确定与方向无关的平均误差曲线,从而确定与方向无关的平均误差数学函数,继而确定与方向无关的平均修正函数,在计算瞄准值时要考虑该修正函数。然而,由于旋转方向的影响产生总误差值的系统误差分量,所以最好独立地对第一方向误差值和第二方向误差值进行计算和/或分析。
如上所述,根据要测定的误差选用各种测量装置。具体地说,用气泡水准仪,最好是电子气泡水准仪,以及陀螺测量系统,最好是光电陀螺测量系统,这些装置理解为包括,例如,环形激光陀螺仪和光纤陀螺仪。通常,在测量步骤开始前把测量装置安装在枪炮和/或武器枪炮管上,再对测量装置进行校准。使用陀螺测量系统时,通常也要测定连续变化的陀螺漂移,并根据陀螺漂移校正测量值。陀螺漂移的测量和校正的例子参见欧洲专利申请00126917.4。
以上叙述了根据武器枪炮管绕其中一根轴转动时产生的误差值检测而确定修正函数。但武器枪炮管不是只绕一根轴旋转,而是绕两根不重合,通常是正交的轴转动。第一根轴最好是竖轴A,而第二根轴最好是横轴L,绕竖轴A转动设定方位角α,绕横轴L转动设定仰角λ。
在第一测量步骤的过程中,可确定方位角同步误差Δα1和摆动误差Δτ。
要测定方位角同步误差Δα1,设定仰角等于0°,逐步改变武器枪炮管的方位角。把用数学方法确定的方位角误差绘制成方位角误差曲线,该曲线通常作成接近正弦函数,武器枪炮管旋转360°相当于正弦函数的一个或多个周期。测量装置是陀螺测量系统的第一测量元件。
第一测量步骤还测定摆动误差Δτ。为此,可使武器枪炮管重复转动以测定方位角同步误差Δα1。然而,实际方位角和预定方位角和/或它们的差值是不能测定和/或不能确定的。测定武器枪炮管轴线相对水平线倾斜的实际角度;该倾斜角度称为实际摆动角度和/或实际值。在这种情形下,由于测量步骤是在仰角等于0°时进行,故倾斜的理论角度通常等于零,该角度称为预定摆动角度和/或预定值。所以测定绕竖轴A转动时的摆动运动。但也可以在仰角不为0°而为一恒角时进行测量;这时,预定摆动角度对应该恒定的仰角的理论角度,而实际摆动角度对应与理论仰角不一致的实际仰角。测量装置用气泡水准仪,最好是电子气泡水准仪。
在第二测量步骤的过程中,可确定仰角同步误差Δλ和垂直偏移误差Δα2。
仰角同步误差Δλ包括两个分量,这两个分量不能分开测定。
仰角同步误差Δλ的第一分量与方位角同步误差相似,基于武器枪炮管的各个实际角度与预定角度不一致的事实。描述仰角同步误差Δλ的第一分量的局部误差曲线和/或局部误差函数具有正弦函数的性质,可能具有多角频率。
仰角同步误差Δλ的另一个分量基于武器枪炮管的重量施加到炮架上的扭矩随仰角的增大而降低的事实;这个扭矩趋于使武器枪炮管向下转动;在栓系位置时,例如方位角为0°及仰角较低时,枪炮会向前倾斜。由于扭矩随仰角的增大而减少,武器枪炮管被稍微向下拉,结果使枪炮微微向前倾和/或与栓系位置相比,向下倾斜。描述仰角同步误差的第二分量的局部误差曲线和/或局部误差函数具有从1中减去的余弦曲线的性质,具有单角频率。
用第二测量步骤确定仰角同步误差的测量,类似于用测量步骤测定方位角同步误差的测量步骤。数学方法可提供误差函数,类似对应于仰角同步误差的第一分量的正弦函数,但该正弦函数不是绕水平线摆动,而是绕从1中减去的余弦曲线的连续递增曲线摆动,该余弦曲线对应于仰角同步误差的第二分量。这两个局部误差函数在数学上可以分开。但在计算相应修正函数时则不必进行这样一种分开,因为只有结果,特别是仰角同步总误差的修正才有意义。不过,局部误差函数还是有一定的作用,这是因为它们能更清楚地显示枪炮结构的误差、温度与各组合件的关系、磨损程度及其他因素。测量装置用陀螺测量系统的第二测量元件。
第二测量步骤也可以确定垂直偏移误差Δα2,其基于一事实,即仰角轴线L和方位角轴线A并不如希望那样互相垂直,另外,武器枪炮管轴线也不如希望那样与仰角轴线L垂直。即使把枪炮校准至水平线,改变仰角λ也会产生方位角α误差。一般来说,垂直偏移误差Δα2用函数描述和/或适当修正,该函数必须与λ的正切函数与λ的反余弦函数之和成正比例,确切地说,Δα2=a tgα+b/cos1-b。当仰角等于90°或接近90°时,因为此时cos1是无穷的,显然根据该函数无法进行修正。用陀螺测量系统的第一测量元件测定垂直偏移误差Δα2。
最后,在第三测量步骤中测定斜视误差Δσ。这种误差表示武器枪炮管轴线与视线不平行。根据本发明的方法用一般途径就可以确定和计算斜视误差Δσ,因此不再作详细叙述。
下面结合实施例及相关附图对本发明的其他特点和优点进行叙述。
(4)附图说明
图1A所示为以图解表示具有本发明装置的武器系统。
图1B所示为图1A武器系统具有正交轴系统三根轴线的枪炮的简图。
图2A所示为用图解解释方位角同步误差。
图2B所示为方位角同步误差的经验误差曲线。
图3A所示为摆动误差的经验误差曲线。
图3B所示为摆动误差的一经验误差曲线;只表示出因下炮架所引起的误差分量。
图3C所示为摆动误差的一经验误差曲线;只表示出因腿部支承所引起的误差分量。
图4A所示为在一恒定方位角时仰角同步误差的经验误差曲线。
图4B所示为作为方位角函数的仰角同步误差,该函数以不同仰角为参数。
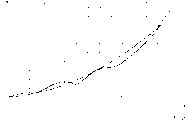
图5所示为垂直偏移误差的经验误差曲线及误差数学函数。
(5)具体实施方式
众所周知,测量的误差与如方位角或仰角等的绝对值相比是很小的,所以表示误差曲线和误差函数的图形没有按比例绘制,以便可清楚看见函数的趋向。
图1A所示为以图解表示的武器系统10。武器系统10装有一具有武器枪炮管10.2的枪炮10.1、一射击调节装置10.3及一射击调节计算机和/或系统计算机10.4。武器系统10还设有一检测武器枪炮管10.2预定位置的预定值检测器10.5。
此外,图1A显示了用于实施本发明方法的装置20。装置20设有一测定实际值的测量设备20.1,而实际值是描述瞄准后武器枪炮管10.2的实际位置,以及一计算器20.2。预定值检测器10.5通常是武器系统10的一个组件,但它的功能也包含在装置20中。
图1B所示为武器系统10的枪炮10.1,其具有下炮架12、上炮架14及武器枪炮管10.2。下炮架12由三条腿12.1、12.2和12.3支承在一水平支承面1上。图1B还显示了带有三根轴的正交轴系统,竖轴以A表示,横轴以L表示,纵轴以R表示。武器枪炮管10.2绕竖轴A转动,可改变横向角和/或方位角α,绕横轴L转动,可改变垂直角和/或仰角λ。
光电陀螺测量系统22置于枪炮口区的武器枪炮管10.2上,其作为形成测量设备20.1的一组成部分。陀螺测量系统22包括第一测量元件和/或α测量元件及第二测量元件和/或λ测量元件,利用这些测量元件可测定因武器枪炮管10.2的方位角α改变和/或仰角λ改变而引起的角度变化。
以下叙述方位角同步误差Δα1和摆动误差Δτ的补偿步骤,这两种误差都在第一测量步骤而不在分步骤中测定。
图2A至2C涉及有关方位角同步误差Δα1的分步骤。图2A所示为枪炮10.1顶视图的简图。武器枪炮管10.2在简图中用武器枪炮管轴线表示,在零位时用实线表示,而在其中一个测量位置则以虚线表示,该位置与零位相差一个角度,例如20°。武器枪炮管10.2自零位开始沿箭头D1所指的方向逐步转动,例如5°,总共转180°至最后位置。武器枪炮管10.2的转动由射击调节计算机10.4控制。测定每个测量位置的横向角和/或方位角α。每转一步之后,理论上武器枪炮管10.2处于一预定位置,由相关的预定值和/或相关的预定方位角α1(理论值)界定,它们显示在,例如,枪炮10.1上。但实际上武器枪炮管10.2处于一实际位置,用实际值和/或实际方位角α1(实际值)表示,它们由测量设备20.1的陀螺测量系统22的α测量元件测定。计算器20.2计算每个位置的误差值和/或误差角,即实际值α1(实际值)与预定值α1(理论值)之差。再把误差值表示成α1(理论值)的函数,作为第一方向方位角经验误差曲线fα1(D1)1。重复多次上述的方法步骤以尽可能消除在测定实际方位角和预定方位角中的随机误差。这样,进一步确定第一方向方位角经验误差曲线fα1(D1)2、fα1(D1)3、fα1(D1)i。如图2B所示,最后由所有第一方向方位角误差曲线得到第一方向方位角平均经验误差曲线fα1(D1)。接着,使器枪炮管10.2沿相反方向,即箭头D2所指的方向转动,重复进行上述的方法步骤。由此得到第二方向方位角经验误差曲线fα1(D2)1、fα1(D2)1、fα1(D2)3及第二方向方位角平均经验误差曲线fα1(D2),参见图2B。然后,由第一方向方位角平均经验误差曲线fα1(D1)和第二方向方位角平均经验误差曲线fα1(D2)算出与方向无关的方位角平均经验误差曲线fα1(D0),也参见图2B。与方向无关的方位角平均经验误差曲线fα1(D0)描述方位角同步误差Δα1,其运行的形状近似具有两个角频率的正弦曲线,如图2B所示。这表明横向中心支承略呈椭圆形。在数字方法中,把与方向无关的方位角平均经验误差曲线fα1(D0)和/或限定该曲线的数值对输入射击调节计算机和/或系统计算机,以供进一步计算瞄准值时用。所有测量步骤的数字方法都相似。
在数学方法中,把与方向无关的方位角平均经验误差曲线fα1(D0)近似表示成方位角误差数学函数Fα1。每一段曲线近似地以局部误差数学函数表示,各个局部误差函数的全体称之误差数学函数,或整条曲线近似地以单个误差数学函数表示。方位角误差数学函数Fα1用于得出修正函数,在计算瞄准值时要考虑该修正函数及其他已有数据。要核对系统计算机10.4的软件执行后的修正函数,重复一次上述的方法步骤;这样确定的方位角误差修正曲线fα1(D0)korr比未修正的误差曲线fα1(D0)扁平得多;因而可使原来的方位角同步误差降至一个很小的剩余误差和/或几乎被全部补偿。
以上所述的方法步骤有部分顺序可以不同,对结果的影响不大或完全没有影响。确切地说,交替测量确定第一方向误差函数和第二方向误差函数可以节省时间。
为了获得更准确结果,可以不绘制确定与方向无关的方位角误差曲线fα1(D0);代之以分别确定第一方向方位角经验误差曲线fα1(D1)和第二方向方位角经验误差曲线fα1(D2)的方位角误差数学函数Fα1(D1)和Fα1(D2),由此而确定相应的修正函数。
图3A至3C涉及摆动误差Δτ。理论上武器枪炮管10.2在仰角等于0°时是水平取向的,即预定仰角必须为0°。实际上,武器枪炮管10.2总会稍微偏离水平线,即实际仰角不为0°,而与0°相差Δτ。角度Δτ是方位角α的函数。在绕竖轴A旋转360°的过程中,武器枪炮管10.2作摆动运动,用摆动误差函数描述。为了测定摆动误差Δτ,保持仰角λ不变使武器枪炮管10.2转动,步骤与确定方位角同步误差Δα1相同。然而,每个测量步骤之后测定的是武器枪炮管10.2的实际倾斜度和/或摆动角度,称之为武器枪炮管摆动角度τ(实际值)。理论倾斜度和/或摆动角度,也称预定值和/或预定摆动角度τ(理论值),等于零。实际值和/或实际摆动角度τ(实际值)以方位角α(理论值)的函数表示。现在,按绘制方位角平均经验误差曲线fα1(D1)和fα1(D2)的步骤,分别绘制第一方向和第二方向摆动经验误差曲线fτ(D1)和fτ(D2)。最后,得到与方向无关的摆动经验误差曲线fτ(D0),把它近似表示成摆动误差数学函数Fτ。图3A所示为多条已确定的摆动经验误差曲线中的两条极限摆动误差曲线,其他所有摆动误差曲线都位于这两条极限曲线之间;看来测量十分准确,这是因为曲线之间只有轻微偏差;摆动运动是一种正弦运动。对摆动运动的测量数据进行分析,分析结果显示在图3B和3C中。由此可见,摆动误差有两个原因:首先,方位角与下炮架的刚性有关;所得到的摆动误差分量参见图3B;其次,方位角也与腿部的加强作用有关,所得到的摆动误差分量参见图3C。在图3B和3C中,摆动误差的正数用实线表示,摆动误差的负数用虚线表示。
接着,将要叙述如何补偿在第二测量步骤中所测定的仰角同步误差Δλ。仰角同步误差Δλ包括两个误差分量。这两个误差分量可以用测量设备20.1的陀螺测量系统22的第二测量元件和/或λ测量元件测定,但只能测定它们的和。因此,λ是指和/或表示涉及总仰角同步误差Δλ的数据和/或函数。在这种情形下,仰角λ理解为在方位角α保持恒定时武器枪炮管10.2向假定武器枪炮管10.2处于水平线的倾斜角度。仰角λ自水平位置开始,即自仰角等于0°及垂直偏差同时为0°开始逐步改变,例如5°,直至最后位置,例如85°。武器枪炮管10.2的移动由计算机控制。每步之后,武器枪炮管10.2处于一测量位置。在这种情形下,仰角的理论值表示预定值和/或预定仰角λ(理论值),由预定值检测器10.5显示。但实际上武器枪炮管10.2处于另一位置,由实际值和/或实际仰角λ(实际值)描述。如以上关于方位角同步误差的叙述一样,λ(理论值)和λ(实际值)之差以λ(理论值)的函数表示。使武器枪炮管10.2沿两个旋转方向重复移动多次。把所记录的测量结果绘制成第一方向仰角平均经验误差曲线fλ(D1)及第二方向仰角平均经验误差曲线fλ(D2)。由第一方向及第二方向仰角平均经验误差曲线fλ(D1)和fλ(D2)得出与方向无关的仰角平均经验误差曲线fλ(D0),在图4 A中用实线表示。从图4A可以看到,增大仰角λ,即武器枪炮管10.2的位置逐渐倾斜,仰角误差曲线fλ(D0)是递增的。然后,仰角经验误差曲线fλ(D0)近似地以仰角误差数学函数Fλ表示,并确定修正函数,在计算瞄准数值时,要对修正函数加以考虑。如果重复测量,而且考虑修正函数,则修正后的仰角误差函数比未修正的误差函数扁平得多。
在测量过程中不可能逐个测定仰角同步误差Δλ的误差分量,但可对仰角误差数学函数Fλ进行数学分析以确定这些误差分量。
仰角同步误差的第一误差分量本身应归纳为误差函数,其本质上对应于具有多角频率的正弦函数。
仰角同步误差的第二误差分量本身应归纳为误差函数fλ(D0)2,该函数本质上归纳为从1中减去的余弦函数,在图4A中用虚线表示。这与炮架上武器枪炮管10.2的重量所产生的扭矩随仰角的增大而下降的事实一致,造成这样的事实是因为武器枪炮管10.2重力作用线与横轴Λ的距离减少;该扭矩具有使枪炮10.1倾斜的趋势,因而武器枪炮管10.2趋向前;减少扭矩使具有武器枪炮管10.2的枪炮10.1稍微向前倾斜和/相对地向后仰。
误差分量的总和对应测量所得到的仰角误差曲线fλ(D0)。这表现为一摆动,其对应递增曲线附近的第一误差分量,而递增曲线对应第二分量。
保持方位角α不变,对第二次测量的仰角同步误差Δλ作上述的测量。再取不同的方位角进行多个系列的测量,每个测量系列的方位角不变,固定方位角之间的角距可以是,例如5°。在这种情形下,一个方位角最好测量两个系列,第一测量系列沿第一旋转方向转动,第二测量系列沿相反旋转方向转动。图4B所示为空间参数,其说明作为方位角α函数的仰角同步误差Δλ,以不同的仰角λ为参数,底部曲线对应最小仰角。
仰角同步误差的其他补偿步骤类似上文关于方位角同步误差的补偿。
另外,应注意,如上述关于方位角同步误差的补偿一样,每个测量和分析步骤至少可有部分顺序不相同,但不会影响结果。
垂直偏移误差Δα2也在第二测量步骤中确定。为此,用λ测量元件确定每个测量位置的仰角同步误差Δλ,用α测量元件确定每个测量位置的垂直偏移误差Δα2。图5所示为作为仰角λ函数的垂直偏移误差。垂直偏移经验误差曲线fα2在图中以虚线表示,该曲线近似以垂直误差数学函数Fα2表示,例如二次多项式,在图中以实线表示。
垂直偏移误差Δα2的测定及补偿类似上文关于方位角同步误差的补偿。
最后,进行第三测量步骤,利用该步骤补偿斜视误差Δσ。斜视误差Δσ是由于武器枪炮管轴线方向与枪炮的视线不重合,偏离一个斜角而产生的。为了确定斜视误差,将武器枪炮管轴线的延长线和视线显示在距武器枪炮管炮口的一定距离,例如,利用投影使武器枪炮管轴线和视线都变成点。两点的偏差就是所要测定的斜视误差,在计算此误差时必须考虑武器枪炮管和投影表面之间的距离。这种确定斜视误差的方法不是新方法,本文仅作补充说明,是因为要完全补偿由静态枪炮几何误差引起的射击误差,也必须对斜视误差加以考虑。
以上叙述主要涉及本发明的方法,下面详细叙述实施该方法所用的装置。
应注意,新方法是在图1A所示的武器系统10上用新装置实施的。武器系统10装有具有至少一武器枪炮管10.2的枪炮10.1,其移动由枪炮伺服电机按照常规方法控制。此外,武器系统10装有射击调节装置10.3。武器系统10还有系统计算机和/或射击调节计算机10.4,其设置在射击调节装置10.3或,至少部分设置在枪炮上。武器系统10通常还设有一预定值检测器10.5,该检测器显示预定值,特别是方位角α和仰角λ,预定值描述由系统计算机10.4确定武器枪炮管10.2瞄准的预定位置。
实施新方法需要多个组件,下面详细加以说明:
第一组件由预定值检测器10.5构成,用于显示描述武器枪炮管10.2预定或假定位置的预定值。预定值检测器设于武器系统10上,在任何情形下都作为预定值检测器使用。
新装置的第二组件由测定描述武器枪炮管10.2实际位置的实际值的测量设备20.1构成。测量设备20.1至少包括光电陀螺测量系统22.1,例如光纤测量系统。陀螺测量系统22.1至少设有第一和/或α测量元件,其用于测定武器枪炮管10.2的角度变化,最好是方位角α变化。陀螺测量系统22.1最好还要有第二和/或λ测量元件,其用于测定武器枪炮管10.2的仰角λ变化。
在本发明的结构中,光电陀螺测量系统理解为不仅包括光电测量系统,而且还包括其他测量系统,例如环形激光陀螺测量系统。陀螺测量系统通常具有可以自动操作的优点;因而无需在系统外设置参考点。也不必把枪炮放在独立测量站。但由于系统外没有参考点,系统通常会随时间产生漂移。在分析测量结果时必须考虑这样产生的陀螺漂移,所以也要测定陀螺漂移。为此也可以使用激光定位系统。
为了更完整地测定静态枪炮几何误差以便更准确地补偿由它们引起的射击误差,新装置的第二组件,即测量设备20.1,最好还设有测定其他误差,特别是摆动误差Δτ和斜视误差Δσ,的测量系统。
要测定摆动误差Δτ,除了陀螺测量系统22.1外,还可采用另一种常用的气泡水准仪,优选为电子气泡水准仪,作为测量系统21.2。水准仪测定相对水平线的角度,在本发明举例说明的实施例中,测定的是武器枪炮管轴线与水平线的各个角度。电子气泡水准仪理解为一检测器,该检测器测定水平角度,即与水平线的角度,以及输出与该角度相关的电子信号。测量利用了重力作用,其限定垂直线,因而也限定了水平线。这时,检测器如何利用重力就不重要了。
另外,要注意借助电子气泡水准仪可测定枪炮10.1的倾斜度。倾斜度理解成这样:如果武器枪炮管10.2只沿方位角移动,那么武器枪炮管炮口的移动可大约看作是限定一平面的圆周线。该平面与水平面的角度差称为倾斜度;换句话说,没有倾斜度,该平面就是水平的。通常,新枪炮会自动补偿倾斜度和/或枪炮会自动校准至水平线。然而,实施新方法时枪炮无需自动校准至水平线。
要测定斜视误差Δσ,除了陀螺测量系统22.1和电子气泡水准仪22.2外,还可用另一种常用的装置,优选为光学装置,作为测量系统22.3。这种装置测定的是武器枪炮管轴线与视线之间的角度差。
实施新方法的第三组件是计算器。如图1A所示,计算器作为独立计算器20.2运行,仅用于实施新方法或其他用途,而且只与所用的武器系统10联接。不过,武器系统10的射击调节计算机和/或系统计算机10.4也可以用作计算器。
新装置的第三组件,在本实施例中是计算器20.2,具有数据输入和/或数据接口,其用于至少输入表示已测定的预定值和实际值的数据。向计算器20.2输入数据可以用希望的任意适当途径,例如,利用如磁盘等数据载体,或通过有形或无形的数据传输电路。
如果射击调节计算机和/或系统计算机10.4用作计算器,那么它应该已存有预定值,而实际值则经数据输入和/或数据接口24输入。
新装置的第三组件,在本实施例中是计算器20.2,还装有运行软件以便由预定值和实际值确定修正值。本实施例的实施步骤在上述关于本发明方法的叙述中已有详细说明。
如果射击调节计算机和/或系统计算机10.4用作计算器,则修正值可直接在射击控制软件中确定。
如果射击调节计算机和/或系统计算机10.4不作计算器,而是使用独立的计算器20.2,则必须经数据输入和/或数据接口24向射击调节计算机和/或系统计算机10.4输入已确定的修正值,并在计算机的射击调节软件中执行。
第三组件,即计算器,特别当它是由独立的计算器20.2形成时,最好设有如键盘等的输入器20.3,经输入器可以输入其他数据。这包括,例如,控制新方法实施过程的数据,它主要通过伺服电机、使用的各种测量系统和/或测量元件的联接控制武器枪炮管逐步转至测量位置。
Claims (17)
1.一种具有武器枪炮管(10.2)的枪炮的射击误差补偿方法,所述射击误差由静态枪炮几何误差引起,并影响武器枪炮管(10.2)以瞄准值瞄准时武器枪炮管(10.2)的位置,其特征在于:所述方法包括以下步骤:
·使武器枪炮管(10.2)绕轴(A,L)转动逐步转到测量位置;
·在每个测量位置测定:描述武器枪炮管(10.2)预定位置的预定值及描述武器枪炮管(10.2)实际位置的实际值;
·计算实际值和预定值之差作为误差值,
·由多个误差值确定修正值,以及
·在武器枪炮管(10.2)随后瞄准时考虑该修正值以作为射击误差补偿值。
2.如权利要求1所述的方法,其特征在于:所述的确定修正值的步骤进一步包括:
·以经验表示修正值,
·以经验表示的修正值近似地用误差数学函数表示,以及
·由误差数学函数确定修正值,在随后计算武器枪炮管(10.2)的瞄准值时考虑该修正值。
3.如权利要求2所述的方法,其特征在于:所述修正值以修正函数的形式确定。
4.如上述权利要求中任何一项所述的方法,其特征在于:还包括用测量设备(20.1)测定实际值,所述测量设备设有光电陀螺测量系统(22.1),其具有第一测量元件,利用第一测量元件测定方位角同步误差(Δα1)和/或垂直偏移误差(Δα2)。
5.如上述权利要求中任何一项所述的方法,其特征在于:还包括用测量设备(20.1)测定实际值,所述测量设备设有光电陀螺测量系统(22.1),其具有第二测量元件,利用第二测量元件测定仰角误差(Δλ)。
6.如上述权利要求中任何一项所述的方法,其特征在于:还包括用测量设备(20.1)测定实际值,所述测量设备设有测量系统(22.2),其具有气泡水准仪,最好是电子气泡水准仪,利用气泡水准仪测定摆动误差(Δτ)。
7.如上述权利要求中任何一项所述的方法,其特征在于:用测量设备(20.1)测定实际值,所述测量设备设有测量系统(22.3),其具有一装置,利用该装置测定斜视误差(Δσ)。
8.如上述权利要求中任何一项所述的方法,其特征在于:把预定值和实际值输入计算机(20.2,10.4),以确定修正值和/或修正函数。
9.如上述权利要求中任何一项所述的方法,其特征在于:修正值储存在指定给枪炮(10.1)的系统计算机(10.4)中,以供计算瞄准武器枪炮管(10.2)所用的瞄准值时用。
10.如上述权利要求中任何一项所述的方法,其特征在于:武器枪炮管(10.2)在转到测量位置的过程中绕枪炮(10.1)的竖轴(A),最好也绕枪炮(10.1)的横轴(L)转动。
11.如权利要求4或5所述的方法,其特征在于:在用光电陀螺测量系统(22)测定实际值的过程中,每隔一段时间或连续地测定陀螺测量系统(22)的陀螺漂移,在测定实际值时考虑该陀螺漂移。
12.一种具有武器枪炮管(10.2)的枪炮的射击误差补偿装置,所述射击误差由静态枪炮几何误差引起,并影响武器枪炮管(10.2)以瞄准值瞄准时武器枪炮管(10.2)的位置,其特征在于:所述装置具有测量设备(20.1),其确定描述武器枪炮管实际位置的实际值,所述测量设备(20.1)具有设于武器枪炮管(10.2)上的光电陀螺测量系统(22.1),其具有第一测量元件,既可以测定方位角同步误差(Δα1),又可以测定垂直偏移误差(Δα2)。
13.如权利要求12所述的装置,其特征在于:光电陀螺测量系统(22.1)具有第二测量元件,以便测定仰角同步误差(Δλ)。
14.如权利要求12至13所述的装置,其特征在于:所述测量设备(20.1)设有:
·一测量系统(22.2),其具有气泡水准仪,最好是电子气泡水准仪以测定摆动误差(Δτ),和/或
·一测量系统(22.3),其具有一测定斜视误差(Δσ)的装置,最好是光学装置。
15.如权利要求12至14中之一所述的装置,其特征在于:所述装置装有计算器(20.2);
·所述计算器连接在预定值检测器(10.5)的输入侧,而检测器用于测定描述武器枪炮管(10.2)预定位置的预定值,所述计算器也连接到测定实际值的测量设备(20.1);
·所述计算器基于预定值和实际值计算修正值,作为武器枪炮管(10.2)瞄准值计算时要考虑的修正值,以补偿射击误差,及
·所述计算器连接在系统计算机(10.4)的输出侧,以便向系统计算机输入表示修正值的数据。
16.如权利要求15所述的装置,其特征在于:计算器(20.2)设有输入数据的输入器。
17.一种武器系统(10)的系统计算机(10.4),其用于计算武器系统(10)中枪炮(10.1)的武器枪炮管(10.2)瞄准所用的瞄准值,其特征在于:系统计算机(10.4)具有输入数据的数据输入(24)端,在计算瞄准值时考虑这些数据,以补偿由静态枪炮几何误差引起并影响武器枪炮管(10.2)位置的瞄准误差。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CH20020064/2002 | 2002-01-16 | ||
| CH20020064/02 | 2002-01-16 | ||
| CH642002 | 2002-01-16 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1432786A true CN1432786A (zh) | 2003-07-30 |
| CN100480614C CN100480614C (zh) | 2009-04-22 |
Family
ID=4309314
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB031027377A Expired - Lifetime CN100480614C (zh) | 2002-01-16 | 2003-01-15 | 射击误差的补偿方法和装置以及武器系统的系统计算机 |
Country Status (13)
| Country | Link |
|---|---|
| US (1) | US20030183070A1 (zh) |
| EP (1) | EP1329683B1 (zh) |
| JP (1) | JP4248856B2 (zh) |
| KR (1) | KR100928753B1 (zh) |
| CN (1) | CN100480614C (zh) |
| AT (1) | ATE303576T1 (zh) |
| CA (1) | CA2416166C (zh) |
| DE (1) | DE50204077D1 (zh) |
| DK (1) | DK1329683T3 (zh) |
| IL (1) | IL153223A (zh) |
| NO (1) | NO327584B1 (zh) |
| PL (1) | PL206455B1 (zh) |
| ZA (1) | ZA200300259B (zh) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101542294B (zh) * | 2006-09-27 | 2011-10-26 | 诺曼·M·林赛 | 用于确定下落的高尔夫球的发射位置的方法和系统 |
| CN104154818A (zh) * | 2014-07-25 | 2014-11-19 | 北京机械设备研究所 | 一种无控弹射击角度确定方法 |
| CN109556459A (zh) * | 2019-01-22 | 2019-04-02 | 中国人民解放军陆军工程大学 | 一种火箭炮惯导寻北精度检测系统和方法 |
| CN112696981A (zh) * | 2020-12-21 | 2021-04-23 | 西北机电工程研究所 | 一种大地坐标系下全闭环干扰速率补偿自稳定控制方法 |
| CN115574662A (zh) * | 2022-09-15 | 2023-01-06 | 北京航天发射技术研究所 | 一种基于行进中射击的车载转塔导航方法及设备 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SE522757C2 (sv) | 2003-03-20 | 2004-03-02 | Saab Ab | Anordning vid eldvapen med servosystem |
| KR100522205B1 (ko) * | 2004-03-30 | 2005-10-18 | 삼성탈레스 주식회사 | 선박에 장착되는 조준 장치의 시차 보정 방법 |
| DE102005059225B4 (de) * | 2005-12-12 | 2013-09-12 | Moog Gmbh | Waffe mit einem Waffenrohr, das außerhalb des Schwerpunkts auf einer bewegbaren Unterlage drehbar gelagert ist |
| DE102007044732A1 (de) * | 2007-09-18 | 2009-04-02 | Oerlikon Contraves Ag | Verfahren und Vorrichtung zur Erhöhung der Treffgenauigkeit einer insbesondere zeitgesteuerten Munitionszerlegung |
| US8006427B2 (en) * | 2008-07-29 | 2011-08-30 | Honeywell International Inc. | Boresighting and pointing accuracy determination of gun systems |
| DE102011106199B3 (de) * | 2011-06-07 | 2012-08-30 | Rheinmetall Air Defence Ag | Vorrichtung und Verfahren zur Thermalkompensation eines Waffenrohres |
| KR101364637B1 (ko) | 2011-12-09 | 2014-02-20 | 국방과학연구소 | 능동파괴체계의 체계 정렬 방법 및 장치 |
| DE102022106062A1 (de) | 2022-03-16 | 2023-09-21 | Vincorion Advanced Systems Gmbh | Verfahren und Notrichtsteuereinheit zum Betreiben eines Notrichtsystems für eine Geschützvorrichtung, Geschützvorrichtung und Fahrzeug |
Family Cites Families (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3575085A (en) * | 1968-08-21 | 1971-04-13 | Hughes Aircraft Co | Advanced fire control system |
| SE331245B (zh) * | 1969-01-03 | 1970-12-14 | Bofors Ab | |
| US3727221A (en) * | 1970-05-18 | 1973-04-10 | R Julier | Error measuring device for a monopulse tracking radar system |
| US3845276A (en) * | 1971-12-17 | 1974-10-29 | Hughes Aircraft Co | Laser-sight and computer for anti-aircraft gun fire control system |
| US3803387A (en) * | 1972-09-20 | 1974-04-09 | Us Navy | Alignment error detection system |
| US3844196A (en) * | 1972-09-28 | 1974-10-29 | Pneumo Dynamics Corp | Fire control system |
| GB1587714A (en) * | 1976-03-16 | 1981-04-08 | Secr Defence | Correcton of gun sighting errors |
| SE425618B (sv) * | 1978-02-22 | 1982-10-18 | Bofors Ab | Anordning for bestemning av lodriktning |
| SE434573B (sv) * | 1979-10-02 | 1984-07-30 | Bofors Ab | Sett och anordning for att hoja linjeriteten hos ett servosystem |
| US4302666A (en) * | 1979-11-13 | 1981-11-24 | The Boeing Company | Position control system of the discontinuous feedback type |
| DE2951108C2 (de) * | 1979-12-19 | 1983-11-17 | Krauss-Maffei AG, 8000 München | Verfahren und Vorrichtung zur Überprüfung des Gleichlaufs der Visierlinie eines Periskops mit auf Zielpunkte richtbaren Elementen |
| FR2505477B1 (fr) * | 1981-05-08 | 1985-06-14 | France Etat | Procede et dispositif d'harmonisation des axes d'une arme et d'un viseur |
| US4464975A (en) * | 1981-12-29 | 1984-08-14 | General Electric Company | Control of dispersion of gun systems |
| DE3219916A1 (de) * | 1982-05-27 | 1983-12-01 | Wegmann & Co GmbH, 3500 Kassel | Verfahren und einrichtung zur ueberpruefung von gleichlaufabweichungen zwischen einer optischen visiereinrichtung und einer auf zielpunkte richtbaren einrichtung, insbesondere einer waffe |
| DE3225395A1 (de) * | 1982-07-07 | 1984-01-12 | Fried. Krupp Gmbh, 4300 Essen | Digitaler ballistikrechner fuer ein feuerleitsystem einer rohrwaffe |
| US4698489A (en) * | 1982-09-30 | 1987-10-06 | General Electric Company | Aircraft automatic boresight correction |
| US4570530A (en) * | 1983-12-14 | 1986-02-18 | Rca Corporation | Workpiece alignment system |
| DE3439082A1 (de) * | 1984-10-25 | 1986-04-30 | Wegmann & Co GmbH, 3500 Kassel | Einrichtung zur durchfuehrung dynamischer vergleichsmessungen an feuerleitsystemen fuer gerichtete waffen |
| EP0229864B2 (de) * | 1986-01-24 | 1993-06-23 | LITEF GmbH | Einrichtung zur Stabilisierung hochdynamischer Geräte auf einem niederdynamischen Träger |
| IL81192A0 (en) * | 1987-01-07 | 1987-08-31 | Israel State | Stabilized line-of-sight aiming system for use with fire control systems |
| TR27014A (tr) * | 1987-05-15 | 1994-09-15 | Contraves Ag | Bir ates idare tertibati icin tevcih usulü ve bu usulü icra etmeye mahsus ates idare tertibati. |
| US5140329A (en) * | 1991-04-24 | 1992-08-18 | Lear Astronics Corporation | Trajectory analysis radar system for artillery piece |
| US5267502A (en) * | 1991-05-08 | 1993-12-07 | Sd-Scicon Uk Limited | Weapons systems future muzzle velocity neural network |
| FR2691792A1 (fr) * | 1992-06-02 | 1993-12-03 | Giat Ind Sa | Dispositif de déclenchement du tir d'une arme à feu. |
| US5481957A (en) * | 1992-07-06 | 1996-01-09 | Alliedsignal Inc. | Aiming and pointing system for ground based weapons equipment |
| US5413028A (en) * | 1993-11-12 | 1995-05-09 | Cadillac Gage Textron Inc. | Weapon stabilization system |
| US5617316A (en) * | 1995-03-15 | 1997-04-01 | Sikorsky Aircraft Corporation | Maintaining attitude error constant in Euler singularity protection |
| US5631437A (en) * | 1996-06-28 | 1997-05-20 | Techno-Sciences, Inc. | Gun muzzle control system using barrel mounted actuator assembly |
| FR2758625B1 (fr) * | 1997-01-17 | 1999-03-19 | Sofresud | Dispositif apte a determiner la direction d'une cible dans un repere predefini |
| ATE284526T1 (de) * | 2001-11-23 | 2004-12-15 | Contraves Ag | Verfahren und vorrichtung zum beurteilen von richtfehlern eines waffensystems und verwendung der vorrichtung |
| KR20070111418A (ko) * | 2007-10-04 | 2007-11-21 | 희 한 | 원격 화기 정밀 사격제어 장치 |
-
2002
- 2002-11-02 DE DE50204077T patent/DE50204077D1/de not_active Expired - Lifetime
- 2002-11-02 DK DK02024376T patent/DK1329683T3/da active
- 2002-11-02 EP EP02024376A patent/EP1329683B1/de not_active Expired - Lifetime
- 2002-11-02 AT AT02024376T patent/ATE303576T1/de not_active IP Right Cessation
- 2002-11-29 JP JP2002348262A patent/JP4248856B2/ja not_active Expired - Lifetime
- 2002-12-02 IL IL153223A patent/IL153223A/en not_active IP Right Cessation
- 2002-12-30 KR KR1020020086860A patent/KR100928753B1/ko not_active Expired - Lifetime
-
2003
- 2003-01-09 NO NO20030094A patent/NO327584B1/no not_active IP Right Cessation
- 2003-01-09 ZA ZA200300259A patent/ZA200300259B/xx unknown
- 2003-01-13 CA CA2416166A patent/CA2416166C/en not_active Expired - Fee Related
- 2003-01-14 US US10/341,877 patent/US20030183070A1/en not_active Abandoned
- 2003-01-15 CN CNB031027377A patent/CN100480614C/zh not_active Expired - Lifetime
- 2003-01-16 PL PL358315A patent/PL206455B1/pl unknown
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101542294B (zh) * | 2006-09-27 | 2011-10-26 | 诺曼·M·林赛 | 用于确定下落的高尔夫球的发射位置的方法和系统 |
| CN104154818A (zh) * | 2014-07-25 | 2014-11-19 | 北京机械设备研究所 | 一种无控弹射击角度确定方法 |
| CN104154818B (zh) * | 2014-07-25 | 2016-01-20 | 北京机械设备研究所 | 一种无控弹射击角度确定方法 |
| CN109556459A (zh) * | 2019-01-22 | 2019-04-02 | 中国人民解放军陆军工程大学 | 一种火箭炮惯导寻北精度检测系统和方法 |
| CN109556459B (zh) * | 2019-01-22 | 2024-02-27 | 中国人民解放军陆军工程大学 | 一种火箭炮惯导寻北精度检测系统和方法 |
| CN112696981A (zh) * | 2020-12-21 | 2021-04-23 | 西北机电工程研究所 | 一种大地坐标系下全闭环干扰速率补偿自稳定控制方法 |
| CN112696981B (zh) * | 2020-12-21 | 2023-02-21 | 西北机电工程研究所 | 一种大地坐标系下全闭环干扰速率补偿自稳定控制方法 |
| CN115574662A (zh) * | 2022-09-15 | 2023-01-06 | 北京航天发射技术研究所 | 一种基于行进中射击的车载转塔导航方法及设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1329683A1 (de) | 2003-07-23 |
| DK1329683T3 (da) | 2005-12-12 |
| DE50204077D1 (de) | 2005-10-06 |
| ATE303576T1 (de) | 2005-09-15 |
| JP2003214797A (ja) | 2003-07-30 |
| CN100480614C (zh) | 2009-04-22 |
| EP1329683B1 (de) | 2005-08-31 |
| KR100928753B1 (ko) | 2009-11-25 |
| CA2416166A1 (en) | 2003-07-16 |
| PL358315A1 (en) | 2003-07-28 |
| NO20030094D0 (no) | 2003-01-09 |
| NO327584B1 (no) | 2009-08-24 |
| CA2416166C (en) | 2010-04-13 |
| IL153223A0 (en) | 2003-07-06 |
| NO20030094L (no) | 2003-07-17 |
| US20030183070A1 (en) | 2003-10-02 |
| IL153223A (en) | 2007-10-31 |
| JP4248856B2 (ja) | 2009-04-02 |
| ZA200300259B (en) | 2003-07-31 |
| KR20030062225A (ko) | 2003-07-23 |
| PL206455B1 (pl) | 2010-08-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1432786A (zh) | 射击误差的补偿方法和装置以及武器系统的系统计算机 | |
| JP6436695B2 (ja) | 測量装置及び測量装置の設置方法 | |
| US10684129B2 (en) | Method for checking and/or calibrating a horizontal axis of a rotating laser | |
| CN1081788C (zh) | 导向光束方向调节装置 | |
| CN108981754B (zh) | 一种光电平台与载机安装角度零位对准的方法 | |
| CN1727845A (zh) | 测量仪 | |
| CN111678504B (zh) | 自动对中调平 | |
| CN1556913A (zh) | 三维坐标测量仪用量器 | |
| CN113189568B (zh) | 一种激光雷达标定的装置和方法 | |
| CN114396894B (zh) | 激光测距与单目视觉的管道直线度检测装置及方法 | |
| CN105021140A (zh) | 基于激光准直技术的靶板调校装置 | |
| JP2004029018A (ja) | 角度誤差規定方法及び該方法に用いる装置 | |
| US7360314B2 (en) | Leveling method and leveling device | |
| JP6721479B2 (ja) | 測定システムおよび測定方法 | |
| CN205096833U (zh) | 一种设备安装姿态的校正装置 | |
| JP4916780B2 (ja) | 測量装置 | |
| CN114187361A (zh) | 一种回转壳体谐振子定位对准系统和方法 | |
| CN1482433A (zh) | 用于校正激光三维测量器的方法及装置 | |
| CN117825046A (zh) | 刮板输送机链条塑性伸长量测量平台及方法 | |
| JP2014137265A (ja) | 形状測定方法、構造物製造方法、形状測定プログラム、光学式形状測定装置、構造物製造システム、及び測定条件設定装置 | |
| CN109900156A (zh) | 一种校靶数据获取系统及航炮校靶方法 | |
| CN114184168A (zh) | 光测设备实时倾斜补偿方法 | |
| CN210042428U (zh) | 水平校正设备 | |
| CN114140444A (zh) | 检测运动平台旋转精度的方法 | |
| CN106767901B (zh) | 一种星敏感器快速标定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CX01 | Expiry of patent term | ||
| CX01 | Expiry of patent term |
Granted publication date: 20090422 |