CN1409118A - 加速度传感器 - Google Patents
加速度传感器 Download PDFInfo
- Publication number
- CN1409118A CN1409118A CN02143502A CN02143502A CN1409118A CN 1409118 A CN1409118 A CN 1409118A CN 02143502 A CN02143502 A CN 02143502A CN 02143502 A CN02143502 A CN 02143502A CN 1409118 A CN1409118 A CN 1409118A
- Authority
- CN
- China
- Prior art keywords
- support arms
- resilient support
- mass fraction
- acceleration transducer
- acceleration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/18—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration in two or more dimensions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B3/00—Devices comprising flexible or deformable elements, e.g. comprising elastic tongues or membranes
- B81B3/0064—Constitution or structural means for improving or controlling the physical properties of a device
- B81B3/0067—Mechanical properties
- B81B3/0078—Constitution or structural means for improving mechanical properties not provided for in B81B3/007 - B81B3/0075
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/0802—Details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/12—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by alteration of electrical resistance
- G01P15/123—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by alteration of electrical resistance by piezo-resistive elements, e.g. semiconductor strain gauges
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B2201/00—Specific applications of microelectromechanical systems
- B81B2201/02—Sensors
- B81B2201/0228—Inertial sensors
- B81B2201/0235—Accelerometers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B2203/00—Basic microelectromechanical structures
- B81B2203/01—Suspended structures, i.e. structures allowing a movement
- B81B2203/0109—Bridges
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B2203/00—Basic microelectromechanical structures
- B81B2203/05—Type of movement
- B81B2203/053—Translation according to an axis perpendicular to the substrate
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B2203/00—Basic microelectromechanical structures
- B81B2203/05—Type of movement
- B81B2203/058—Rotation out of a plane parallel to the substrate
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P2015/0805—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration
- G01P2015/0822—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass
- G01P2015/084—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass the mass being suspended at more than one of its sides, e.g. membrane-type suspension, so as to permit multi-axis movement of the mass
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P2015/0805—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration
- G01P2015/0822—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass
- G01P2015/084—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass the mass being suspended at more than one of its sides, e.g. membrane-type suspension, so as to permit multi-axis movement of the mass
- G01P2015/0842—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass the mass being suspended at more than one of its sides, e.g. membrane-type suspension, so as to permit multi-axis movement of the mass the mass being of clover leaf shape
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Pressure Sensors (AREA)
Abstract
本发明提供了一种超小型和薄的半导体加速度传感器,具有高的灵敏度。加速度传感器具有一质量部分形成在硅半导体衬底的中心部分,一框架形成衬底的周边部分,薄的弹性支撑臂,位于质量部分和框架的上部并连接质量部分和框架,许多对压敏电阻分布在弹性支撑臂的上表面侧。在质量部分中形成了许多凹进部分,它们从它的边缘向它的中心凹进。每个弹性支撑臂在每个凹进部分的底部与质量部分的上表面连接,弹性支撑臂的各侧与凹进部分的各侧隔离。由于质量部分的体积和弹性支撑臂的长度能够独立地做大,灵敏度能够做得更大。
Description
发明背景
1、发明领域
本发明涉及一种加速度传感器,用来探测加速度,可以用于玩具,汽车,航行器,便携式终端等等,尤其涉及一种可以使用半导体工艺制造的加速度传感器。
2、相关工艺描述
利用物理量的改变例如压电电阻效应和静电电容的改变的加速度传感器已经发展起来并商业化了。这些加速度传感器能够广泛应用于各种领域,但是最近,需要象这样能够同时探测多轴方向的加速度并具有高的灵敏度的小尺寸加速度传感器。
自从硅单晶由于极小的晶格缺陷成为理想的弹性体以及半导体工艺技术不必大的修改能够应用于此以来,压电电阻效应型半导体加速度传感器引起了广泛的注意,其中一薄的弹性支撑部分位于一硅单晶衬底上,应用于薄弹性支撑部分的压力被应变仪例如,压电电阻效应元件,转换成电信号并输出。
作为一个通常的三轴加速度传感器,有一个公开,例如,在日本公开专利号No.63-169078,它的俯视图显示在图15中,沿着图15中的XVI-XVI线取的截面图显示在图16中,而透视图显示在图17中。加速度传感器100有许多弹性支撑臂130,每一个都具有梁结构,由硅单晶衬底的一薄的部分组成。在中间有一质量部分120,它由硅单晶衬底的一厚的部分组成,与在它边缘的框架110由弹性支撑臂130连接起来。在弹性支撑臂130的每个轴方向形成许多应变仪140。
参照图15,图16和图17能够解释整体结构。传感器100具有由硅单晶衬底的厚的部分组成的质量部分120,框架110围绕质量部分120放置,两对弹性支撑臂130有梁的形式,它们互相垂直并且每一个都由硅单晶衬底的薄的部分组成并连接质量部分120和框架110。当传感器工作时,此质量部分在框架内移动以使弹性支撑臂变形,因此变形被位于弹性支撑臂上的应变仪检测到以获得工作的加速度。在图15中X轴方向上的加速度通过位于向X轴方向延伸的弹性支撑臂上的四个应变仪140测量,Y轴方向上的加速度通过位于向Y轴方向延伸的弹性支撑臂上的四个应变仪140测量。Z轴方向上的加速度依靠所有应变仪140得到测量。通过在具有框架110的尺寸的硅单晶衬底里制造四个L形通孔150,形成了中间的质量部分120、位于边缘的框架110和连接它们的支撑臂130,而通过使支撑臂部分薄,加速度传感器构造得可以变形和具有高灵敏性。
在以上描述的加速度传感器中,为了加强灵敏性,有效的办法是增加质量部分120的体积从而增加它的质量,或者增加弹性支撑臂130的长度,正如众所周知的,灵敏性的增加充分地与质量部分的质量和支撑臂的长度成比例。这就是说,质量部分120的体积增加,或者弹性支撑臂130的长度增加,因此弹性支撑臂130变得更容易变形而且压力能够更有效地传递到应变仪,因此增加了灵敏性。然而,增加质量部分120和增加弹性支撑臂130的长度相互矛盾,而且特别是在晶片尺寸保持为常数的条件下或计划减小尺寸时它们两个互相不相容。也就是说,如果质量部分120变得更大,弹性支撑臂130的长度变得更短,那么灵敏性的许多提高不能得到提高。因此,在装配过程中玻璃片等等都粘贴在质量部分120的后表面以提高质量部分120的体积(也就是,重量),因此提高了灵敏性。弹性支撑臂130的长度不能做得很大,但是晶片在厚度方向(硅单晶衬底的厚度方向)做得更大,因此增加了质量部分120的质量从而加强了灵敏性。因此,通常不可能实现高灵敏度的小型和薄的加速度传感器。
发明摘要
本发明考虑到以上描述的情况,它的目的是解决以上描述的难题并提供了一种能提高灵敏性的小型和薄的加速度传感器。
为了解决以上描述的问题,本发明采用以下的加速度传感器。也就是说,本发明的加速度传感器在中间具有质量部分;围绕质量部分的厚的框架到质量部分具有预设的距离;应变仪分布在弹性支撑臂上,许多凹进部分,它们从质量部分的边缘向它的中心凹进,形成在质量部分中,每个弹性支撑臂在每个凹进部分的底面与质量部分的上表面连接,弹性支撑臂的各侧与凹进部分的各侧分离。
在上述的加速度传感器中,最好是加速度传感器具有四个弹性支撑臂,它们的四个弹性支撑臂中的两个与弹性支撑臂的其它两个正交。同时最好是使四个弹性支撑臂的各自两个弹性支撑臂都线性排列。最好是使沿着弹性支撑臂的纵向方向探测加速度的应变仪和沿着上表面方向探测加速度的应变仪位于线性排列的弹性支撑臂的两个上。
最好是本发明的加速度传感器由一SOI晶片制成,并且这些弹性支撑臂由一SiO2层和一硅层组成。
在本发明的加速度传感器中,当加速度工作在加速度传感器中时,质量部分的位移与在加速度的方向上加速度的大小成比例。弹性支撑臂,它位于质量部分的外周以向外延伸,在一个与质量部分的位移相应的特殊的方向弯曲,并且同时,多个位于弹性支撑臂上的应变仪也弯曲。因此,应变仪的电阻值由于这些弯曲而改变,并且如果由全电桥电路组成的探测电路是由四个应变仪提供在各个轴的方向上而构成的,那么能够获得相应于施加的弯曲量的电压输出。
在本发明的加速度传感器中,在质量部分中,两对基本成矩形平行六面体的凹口,也就是,凹进部分,它的宽度大于弹性支撑臂的宽度,相应于X和Y轴方向的两个方向从质量部分的边缘向中心凹进,并且质量部分在凹口的上表面侧与两对弹性支撑臂连接。质量部分的体积和弹性支撑臂的长度能够在此传感器的性能的充要条件的范围内独立设计。也就是说,两个设计参数,即为了提高质量部分的体积和提高弹性支撑臂的长度的参数,能够自由决定,并且因此能够在小而薄的元件结构里实现高灵敏度。
附图简述:
图1是显示本发明的第一实施方式的加速度传感器的俯视图;
图2是图1中的加速度传感器的仰视图;
图3是图1中的加速度传感器沿图1中的III-III线取的截面图;
图4是图1中的加速度传感器的透视图;
图5是显示了灵敏性和本发明的加速度传感器的质量部分的体积的关系的曲线图;
图6是显示了灵敏性和本发明的加速度传感器的弹性支撑臂的长度的关系的曲线图;
图7是显示了灵敏性和本发明的加速度传感器的弹性支撑臂的宽度的关系的曲线图;
图8是显示了灵敏性和本发明的加速度传感器的弹性支撑臂的厚度的关系的曲线图;
图9是解释了当加速度在X轴(Y轴)方向工作时加速度传感器的变形的示意图;
图10显示了测量X轴(Y轴)方向的加速度的桥电路的例子;
图11是解释了当加速度在Z轴方向工作时加速度传感器的变形的示意图;
图12显示了测量Z轴方向的加速度的桥电路的例子;
图13显示了本发明的实施方式的加速度传感器在A到E的生产过程;
图14是显示了本发明的另一实施方式的加速度传感器的俯视图;
图15是显示了在日本公开专利中公告的加速度传感器的俯视图;
图16是图15中的加速度传感器沿图15中的XVI-XVI线取的截面图;和
图17是图15中的加速度传感器的透视图。
具体实施方式详述
本发明的每一种实施方式将在下面解释。
将使用图1,图2和图3来解释本发明的第一实施方式。图1是本发明的半导体加速度传感器的俯视图,图2是根据图1中显示的本发明的实施方式的加速度传感器的平面图,它是从下面看的,图3是图1中沿III-III线(X轴)取的截面图。
本发明的加速度传感器使用一硅单晶衬底,通过SiO2绝缘层形成SOI层,也就是,一SOI晶片,为了使高精度地控制弹性支撑臂的厚度成为可能。SOI是绝缘体上的硅的缩写。在此例中,通过稀疏地形成SiO2绝缘层而形成的晶片成为一厚度约550μm的Si晶片上的蚀刻阻止(约1μm),这个晶片上形成了一厚10μm的N型硅单晶层,如此形成的晶片作为衬底使用。本实施方式的加速度传感器由这些部分组成:中心一质量部分2,它由硅单晶衬底的一厚的部分组成;放置在质量部分2周围以包围它的方形框架1;两对梁形弹性支撑臂3a,3b,3c和3d,它们由硅单晶衬底的薄的部分组成以连接质量部分2和框架1,应变仪(在接下来的解释中,“压敏电阻”是应变仪使用的一个例子,因此它们被称作“压敏电阻”)11,12,...,33,34,它们中的四个用于每一个轴,并且它们位于弹性支撑臂上,相应于互相垂直的两个探测轴(X和Y轴)和直交于加速度传感器的上表面的探测轴(Z轴)。也就是说,两个压敏电阻13和14以及两个压敏电阻11和12各自位于沿X轴方向弹性支撑臂3a和3c上以探测X轴方向上的加速度。两个压敏电阻21和22以及两个压敏电阻23和24各自位于沿Y轴方向延伸的弹性支撑臂3b和3d上以探测Y轴方向上的加速度。两个压敏电阻33和34以及两个压敏电阻31和32各自位于沿X轴方向延伸的弹性支撑臂3a和3c上以探测Z轴方向的加速度。在这个例子中,Z方向上的加速度被位于弹性支撑臂3a和3c上的压敏电阻探测,但是探测Z轴方向上的加速度的元件可以位于弹性支撑臂3b和3d上。探测每一个方向上的加速度的压敏电阻中的四个电阻组成一整个桥探测电路。
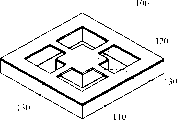
在质量部分2中,形成许多凹进部分51,也就是,从边缘向中心凹进的凹口部分。在本实施方式中,每一凹进部分51都沿方形质量部分2的每一侧的中心向质量部分的中心而形成。这里凹进部分是矩形平行六面体的形状,并且弹性支撑臂的一端在凹进部分的底部与质量部分的上表面相连,而弹性支撑臂的另一端与厚框架的上表面相连,并且质量部分和厚框架以弹性支撑臂桥接。必须使位于每一个凹进部分的弹性支撑臂的各侧与凹进部分的各侧分离。
为了使根据本发明的传感器结构更加便于理解,在图4中显示了示意图。如图1到3中相同的成分在图4中用相同的参数符号给出。在图4中显然,通过采用本发明的结构,能够独立控制质量部分2的体积和弹性支撑臂3a,3b,3c和3d的长度。也就是,弹性支撑臂3a,3b,3c和3d做得薄而尽可能长,而质量部分2做得尽可能大,因此传感器的探测灵敏度能够提高。
这里,将研究质量部分的体积和弹性支撑臂的长度,宽度和厚度,它们都对加速度传感器的灵敏度有影响,而这,也就是本发明的课题。如图5中显示的加速度传感器的灵敏度和质量部分的体积(质量)的关系,灵敏度与质量部分的体积(质量)成比例,如果体积加倍,灵敏度加倍。加速度传感器的灵敏度和弹性支撑臂的长度的关系显示在图6中。灵敏度与弹性支撑臂的长度成比例。图5和图6显示了假定其它条件相同的比较。在本发明中,凹口或者凹进部分提供在质量部分上以使弹性支撑臂更长,而质量部分的体积可以做得更大。为了这个目的,根据本发明的加速度传感器,当芯片尺寸做成常数时,甚至当弹性支撑臂的长度固定在目前状态下时,可以不增加芯片的厚度而使质量部分2的体积容易能够做到2倍或更大,而灵敏度能够提高到与这成比例。进一步,很容易使得凹口部分更大并使弹性支撑臂的长度变成目前长度的1.5倍或更多,并且在这种情况下质量部分2的体积的减小很小。灵敏度的增加几乎与弹性部分的长度成比例。通过优化质量部分的凹口的深度,可能不降低灵敏度而使芯片尺寸更小。
作为参考,灵敏度与弹性支撑臂的宽度之间的关系,以及灵敏度与弹性支撑臂的厚度之间的关系各自显示在图7和图8中。弹性支撑臂更小的宽度和厚度适合于增加灵敏度是容易理解的。
在这里将解释位于弹性支撑臂的压敏电阻的功能。给沿着X轴方向延伸的弹性支撑臂3c和3a提供压敏电阻11和12,以及13和14,用来测试X轴方向上的加速度。给沿着Y轴方向延伸的弹性支撑臂3d和3b提供压敏电阻21和22,以及23和24,用来测试Y轴方向上的加速度。给沿着X轴方向延伸的弹性支撑臂3c和3a提供压敏电阻31和32,以及33和34,用来测试Z轴方向上的加速度。
当X轴方向上的加速度加在质量部分2上时,力Fx作用于质量部分2的重力的中心,因此如图9所示,质量部分2的上表面的左侧向下移动,而它的上表面的右侧向上移动。结果,处于弹性支撑臂3a上的压敏电阻11扩张,而压敏电阻12收缩。处于弹性支撑臂3a上的压敏电阻13扩张,而压敏电阻14收缩。由于压敏电阻象这样扩张和收缩,电阻R11,R12,R13和R14改变了。当压敏电阻的电阻结合成为一个全电桥电路并且常压Vin应用于它时,如图10所示,能够根据输出Vout测量压敏电阻的电阻的改变。至于Y轴方向的加速度,沿Y轴方向延伸的弹性支撑臂能够用与在X轴方向相同的方式考虑。
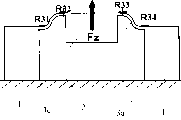
当Z轴方向上的加速度加在质量部分2上时,力Fz作用,质量部分2的上表面的左侧和右侧向上移动,如图11所示。结果,处于弹性支撑臂3c上的压敏电阻31收缩,而压敏电阻32扩张。以相同的方式,处于弹性支撑臂3a上的压敏电阻33扩张,而压敏电阻34收缩。当压敏电阻的电阻R11,R12,R13和R14结合成为一整个桥电路和常压Vin应用于它时,如图12所示,能够根据输出Vout测量压敏电阻的电阻的改变。也适合于从探测X轴方向的加速度的桥电路的那些连接中改变桥电路中的电阻的电线连接来探测Z轴方向上的加速度,因此也使用其它压敏电阻。
下面将解释本实施方式的一种生产方法。图13显示了图1中的X轴方向的一个截面(III-III截面)的部分(左半部分)用来解释主要工艺。如上面所描述的,SOI晶片是一Si单晶衬底,由Si基底60,上表面上的一SOI层80,(它是一Si活性层,)和一SiO2层70,(它处于Si基底60和SOI层80之间并且作为蚀刻阻止使用,)所构成,如图13中的标号所表示。作为它们的厚度,Si基底60厚500μm到625μm,SiO2层厚1μm而SOI层厚约10μm。
生产工艺的第一步是做一个预设形式的图形,它的SOI层80的表面上有光刻胶或热氧化SiO2膜等等,以及制造压敏电阻11和12,通过杂质扩散工艺例如离子注入(图13)来进行硼扩散。作为表面杂质密度,从温度特性和灵敏性两个角度看,采用大约2×1018原子/cm3。
接着,为了保护压敏电阻11和12,制造一层保护膜41(图13B)。作为保护膜41,使用通常在半导体技术中使用的SiO2和PSG(磷硅酸盐玻璃)多层膜,对可移动的离子起收气作用。代替SiO2和PSG的两层膜,可以使用SiO2和GaN的两层膜。根据高灵敏度,最好是保护膜41的厚度做得尽可能薄以减小压力,因此它做得0.3μm到0.5μm。
接着,通过氢氟酸作为主要成分的湿法腐蚀。在保护膜41中,在压敏电阻11和12的两端上,形成连接电极的通孔40a(图13C)。
接着,为了制造电极电线,通过溅射形成铝合金膜(铝,铜,硅等等是主要成分)。厚度是0.3μm到0.5μm。引线电极(lead electrode)40通过光刻形成(图13D)。
接着,虽然没有显示,通过干法腐蚀或其它类似方法腐蚀SOI层80,以形成一通孔图形5到图1中显示的薄的部分。
接着,在基底60上后表面上,形成的光刻胶掩膜具有质量部分2和框架1的形状,同时使用双面调整器件来调整通压敏电阻11和12,到达SOI层80的通孔图形5等等的位置,通过干法腐蚀来蚀刻基底60,而作为腐蚀阻止的SiO2层70通过湿法腐蚀清除掉(图13E)。作为腐蚀溶液,使用缓冲氢氟酸。本过程光刻胶掩膜的形状做成这样的形状,在弹性支撑臂3a,3b,3c和3d连接的地方,在方形质量部分的四侧面上,有矩形的凹口。弹性支撑臂3a,3b,3c和3d在这个干法腐蚀过程中形成,在某些情况下,最好是让SiO2层70作为蚀刻阻止而不把它清除掉,目的是保持整个压力的平衡,在弹性支撑臂的后侧余下SiO2层70的部分作为蚀刻阻止可以是合适的。
然后,通过使用切割器或类似工具,形成在晶片上的许多加速度传感器元件一片一片被切成传感器芯片,通过装配工艺例如封装等等,完成了半导体加速度传感器。
本发明的另一实施方式的加速度传感器显示在图14中。图14是传感器的前侧的平面图,与图1中相同的元件用相同的标号和符号给出,以便于理解。在此实施方式中,在质量部分2中,它的角落沿四个方向延伸如四叶苜蓿做成弯曲的表面,并且同时框架1的四个角落部分被做成弯曲的表面。在图13描述的生产工艺中对质量部分2进行干法腐蚀的时候,通过降低图形宽度尺寸的差异并提高蚀刻气流的流动,这个实施方式具有提高蚀刻速度一致性的效果,它作为此实施方式特有的效果,同时也如前述第一实施方式中解释的那样,有使得传感器做得紧凑且薄而增强灵敏性这样的效果。框架部分的机械强度也能够提高。
在迄今描述的第一和第二实施方式中,在SOI层80中形成的通孔图形5与当通过蚀刻基底60形成质量部分2时从晶片的后侧通过穿透蚀刻清除掉的模式具有相同的形状,但是它们不是必须彼此符合,并且只要质量部分2和弹性支撑臂3a,3b,3c和3d,以及框架1是隔离的,也是可以的。到达SOI层80的通孔图形5和质量部分2的图形形状,除了前述第一和第二实施方式外可以有各种考虑。也就是,作为质量部分2和框架1的形状,可以考虑各种各样的形状,它们不限于前述实施方式的形状。
Claims (6)
1.一种加速度传感器,包括:
处在中心的质量部分;
围绕质量部分的厚边框,它到质量部分有一个预设的距离;
多个弹性支撑臂,桥接质量部分的一个上表面和厚边框;以及
布置在弹性支撑臂上的应变仪,
其中多个凹进部分形成在质量部分中,它们从质量部分的周边向质量部分的中心凹进,每一个弹性支撑臂在每个凹进部分的底部与质量部分的上表面连接,弹性支撑臂的各侧与凹进部分的各侧分离。
2.根据权利要求1的加速度传感器,其中加速度传感器具有四个弹性支撑臂,它的弹性支撑臂中的两个与弹性支撑臂的其它两个正交。
3.根据权利要求2的加速度传感器,其中四个弹性支撑臂的各自两个线性排列。
4.根据权利要求3的加速度传感器,其中探测弹性支撑臂的纵向方向上的加速度的应变仪和探测上表面方向上的加速度的应变仪布置在线性排列的两个弹性支撑臂上。
5.根据权利要求3的加速度传感器,其中加速度传感器由一SOI晶片制成,这些多个弹性支撑臂由一SiO2层和一硅层构成。
6.根据权利要求4的加速度传感器,其中加速度传感器由一SOI晶片制成,这些多个弹性支撑臂由一SiO2层和一硅层构成。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP293526/2001 | 2001-09-26 | ||
| JP2001293526 | 2001-09-26 | ||
| JP363371/2001 | 2001-11-28 | ||
| JP2001363371A JP2003172745A (ja) | 2001-09-26 | 2001-11-28 | 半導体加速度センサ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN1409118A true CN1409118A (zh) | 2003-04-09 |
Family
ID=26622909
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN02143502A Pending CN1409118A (zh) | 2001-09-26 | 2002-09-26 | 加速度传感器 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20030057447A1 (zh) |
| EP (1) | EP1298442A1 (zh) |
| JP (1) | JP2003172745A (zh) |
| KR (1) | KR20030026872A (zh) |
| CN (1) | CN1409118A (zh) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100373161C (zh) * | 2003-09-16 | 2008-03-05 | 日立金属株式会社 | 加速度传感器 |
| CN1873421B (zh) * | 2005-05-30 | 2010-06-02 | 冲电气工业株式会社 | 半导体加速度传感器装置及其制造方法 |
| CN102967729A (zh) * | 2012-09-18 | 2013-03-13 | 华东光电集成器件研究所 | 一种压阻式mems加速度计 |
| CN104919293A (zh) * | 2012-12-06 | 2015-09-16 | 株式会社村田制作所 | 压阻式mems传感器 |
| CN107963095A (zh) * | 2017-11-23 | 2018-04-27 | 交控科技股份有限公司 | 车轮速度传感器、检测装置及车轴状态检测方法 |
| WO2021042316A1 (zh) * | 2019-09-05 | 2021-03-11 | 深圳市柔宇科技有限公司 | 加速度传感器 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1491901A1 (en) | 2003-06-25 | 2004-12-29 | Matsushita Electric Works, Ltd. | Semiconductor acceleration sensor and method of manufacturing the same |
| JP2006275896A (ja) * | 2005-03-30 | 2006-10-12 | Yokohama Rubber Co Ltd:The | 半導体加速度センサ |
| JP4747677B2 (ja) * | 2005-05-27 | 2011-08-17 | 大日本印刷株式会社 | 角速度センサの製造方法 |
| ITTO20070033A1 (it) * | 2007-01-19 | 2008-07-20 | St Microelectronics Srl | Dispositivo microelettromeccanico ad asse z con struttura di arresto perfezionata |
| JP4838229B2 (ja) | 2007-07-27 | 2011-12-14 | トレックス・セミコンダクター株式会社 | 加速度センサー |
| JP5652775B2 (ja) | 2009-05-29 | 2015-01-14 | トレックス・セミコンダクター株式会社 | 加速度センサー素子およびこれを有する加速度センサー |
| EP3121561B1 (en) | 2014-03-20 | 2019-06-26 | KYOCERA Corporation | Sensor |
| CN107211222B (zh) | 2015-01-26 | 2020-03-24 | 思睿逻辑国际半导体有限公司 | Mems换能器 |
| CN105021846B (zh) * | 2015-07-06 | 2018-04-17 | 西安交通大学 | 一种六轴一体式微加速度传感器及其制作方法 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2940293B2 (ja) * | 1992-03-31 | 1999-08-25 | 日産自動車株式会社 | 半導体加速度センサの製造方法 |
| EP1119032B8 (en) * | 1992-04-22 | 2008-03-19 | Denso Corporation | A method for producing a semiconductor device |
| JP2776142B2 (ja) * | 1992-05-15 | 1998-07-16 | 株式会社日立製作所 | 加速度センサ |
| JPH06148229A (ja) * | 1992-11-04 | 1994-05-27 | Fujikura Ltd | 半導体加速度センサ |
| JP2639308B2 (ja) * | 1992-11-19 | 1997-08-13 | 富士電機株式会社 | 力センサ,温度センサおよび温度・力センサ装置 |
| JPH08107219A (ja) * | 1994-10-04 | 1996-04-23 | Seiko Instr Inc | 半導体加速度センサ及び半導体加速度センサの製造方法 |
| JP3305516B2 (ja) * | 1994-10-31 | 2002-07-22 | 株式会社東海理化電機製作所 | 静電容量式加速度センサ及びその製造方法 |
| FR2742230B1 (fr) * | 1995-12-12 | 1998-01-09 | Sextant Avionique | Accelerometre et procede de fabrication |
| US5894090A (en) * | 1996-05-31 | 1999-04-13 | California Institute Of Technology | Silicon bulk micromachined, symmetric, degenerate vibratorygyroscope, accelerometer and sensor and method for using the same |
| EP0899574B1 (en) * | 1997-02-21 | 2004-07-21 | Matsushita Electric Works, Ltd. | Acceleration sensor element and method of its manufacture |
| US6196067B1 (en) * | 1998-05-05 | 2001-03-06 | California Institute Of Technology | Silicon micromachined accelerometer/seismometer and method of making the same |
-
2001
- 2001-11-28 JP JP2001363371A patent/JP2003172745A/ja active Pending
-
2002
- 2002-09-16 US US10/243,650 patent/US20030057447A1/en not_active Abandoned
- 2002-09-18 EP EP02021223A patent/EP1298442A1/en not_active Withdrawn
- 2002-09-24 KR KR1020020057700A patent/KR20030026872A/ko not_active Application Discontinuation
- 2002-09-26 CN CN02143502A patent/CN1409118A/zh active Pending
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100373161C (zh) * | 2003-09-16 | 2008-03-05 | 日立金属株式会社 | 加速度传感器 |
| CN1873421B (zh) * | 2005-05-30 | 2010-06-02 | 冲电气工业株式会社 | 半导体加速度传感器装置及其制造方法 |
| CN102967729A (zh) * | 2012-09-18 | 2013-03-13 | 华东光电集成器件研究所 | 一种压阻式mems加速度计 |
| CN104919293A (zh) * | 2012-12-06 | 2015-09-16 | 株式会社村田制作所 | 压阻式mems传感器 |
| CN107963095A (zh) * | 2017-11-23 | 2018-04-27 | 交控科技股份有限公司 | 车轮速度传感器、检测装置及车轴状态检测方法 |
| WO2021042316A1 (zh) * | 2019-09-05 | 2021-03-11 | 深圳市柔宇科技有限公司 | 加速度传感器 |
| CN113366321A (zh) * | 2019-09-05 | 2021-09-07 | 深圳市柔宇科技股份有限公司 | 加速度传感器 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1298442A1 (en) | 2003-04-02 |
| JP2003172745A (ja) | 2003-06-20 |
| US20030057447A1 (en) | 2003-03-27 |
| KR20030026872A (ko) | 2003-04-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1409118A (zh) | 加速度传感器 | |
| CN1273836C (zh) | 加速度传感器 | |
| JP3457037B2 (ja) | 集積型加速度計 | |
| US4553436A (en) | Silicon accelerometer | |
| US5081867A (en) | Semiconductor sensor | |
| US5239870A (en) | Semiconductor acceleration sensor with reduced cross axial sensitivity | |
| KR100715644B1 (ko) | 가속도 센서 | |
| US5404749A (en) | Boron doped silicon accelerometer sense element | |
| CN101038298A (zh) | 对称直梁结构电容式微加速度传感器及其制作方法 | |
| JP4335545B2 (ja) | 圧力と加速度との双方を検出するセンサおよびその製造方法 | |
| US7111514B2 (en) | Acceleration sensor | |
| US6763719B2 (en) | Acceleration sensor | |
| CN110780088A (zh) | 多桥路隧道磁阻双轴加速度计 | |
| CN107643424B (zh) | 一种压阻式mems加速度芯片及其制作方法 | |
| CN116678544A (zh) | 一种硅应变计及制造方法 | |
| CN114061797B (zh) | 一种双电桥结构mems压阻式压力传感器及其制备方法 | |
| CN113504392B (zh) | 一种高g值、高灵敏度MEMS加速度传感器及其制备方法 | |
| CN100422697C (zh) | 加速度传感器 | |
| JP2002529684A (ja) | 歪み測定器 | |
| JPH05340956A (ja) | 加速度センサ | |
| JPH08211091A (ja) | 半導体加速度検出装置 | |
| JPH1144705A (ja) | 半導体加速度センサおよびその製造方法 | |
| CN221147909U (zh) | 基于soi隔离技术的温度、加速度、压力传感器芯片 | |
| CN101613074A (zh) | 用于测量三维矢量的微机电系统元件 | |
| CN117031069A (zh) | 三轴加速度计及传感设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |