CN1299184A - 感应电动机的矢量控制装置 - Google Patents
感应电动机的矢量控制装置 Download PDFInfo
- Publication number
- CN1299184A CN1299184A CN00124107A CN00124107A CN1299184A CN 1299184 A CN1299184 A CN 1299184A CN 00124107 A CN00124107 A CN 00124107A CN 00124107 A CN00124107 A CN 00124107A CN 1299184 A CN1299184 A CN 1299184A
- Authority
- CN
- China
- Prior art keywords
- mentioned
- value
- command value
- angular frequency
- arithmetic unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/06—Rotor flux based control involving the use of rotor position or rotor speed sensors
- H02P21/10—Direct field-oriented control; Rotor flux feed-back control
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/06—Rotor flux based control involving the use of rotor position or rotor speed sensors
- H02P21/08—Indirect field-oriented control; Rotor flux feed-forward control
- H02P21/09—Field phase angle calculation based on rotor voltage equation by adding slip frequency and speed proportional frequency
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
- H02P21/16—Estimation of constants, e.g. the rotor time constant
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2207/00—Indexing scheme relating to controlling arrangements characterised by the type of motor
- H02P2207/01—Asynchronous machines
Abstract
一种感应电动机的矢量控制装置,根据转矩指令值、二次磁通指令值以及感应电动机常数,来算出d轴电流指令值、q轴电流指令值以及滑差角频率指令值,在此装置中具有自动调整二次电阻的修正值的装置。使用d,q轴前馈电压指令值E1DFF和E1QFF、d,q轴电压指令值E1DR和E1QR、转矩电流指令值IQR和磁通电流指令值IDR,由二次电阻修正值运算部10算出二次电阻修正值ΔR2,由矢量控制指令运算部1,使用二次电阻修正值△R2来进行感应电动机19的矢量控制。
Description
本发明涉及感应电动机的矢量控制装置,特别是涉及能够自动调整感应电动机的二次电阻(感应电动机的转子侧的电阻)的设定值的感应电动机的矢量控制装置。
一般,在产业领域中广泛采用矢量控制来作为用于高速控制感应电动机的输出转矩的一个方式。以下对矢量控制进行简单说明。
矢量控制是:在与电源同步旋转的正交旋转坐标系中,作为把其中一方的轴取为二次磁通方向的被称为d-q坐标系的坐标系的矢量,来表现三相感应电动机的电流和磁通,独立地控制感应电动机的转矩和二次磁通的控制。
在矢量控制中,通过以下(1)~(3)式,使用转矩指令值T*、二次磁通指令值Ф2*和电动机常数来计算转矩电流指令值IQR、磁通电流指令值IDR和滑差角频率指令值ωs*。该式的导出方法记载在例如中野孝良著日刊工业新闻社发行的「交流电动机的矢量控制」中,由于是公知的,在此就不再描述。 其中,P:电动机的极对数M:电动机的互感(H)L1:电动机的一次自感(H)L2:电动机的二次自感(H)R2:电动机的二次电阻(Ω)。
如以上那样,在矢量控制中,用(3)式来计算滑差角频率指令值ωs*,并进行控制,但在(3)式中包含电动机的二次电阻R2,该R2的值随着周围温度和感应电动机本身的发热所产生的温度变化而变化,因此,在(3)式的运算中使用的R2的值需要使用推定随着温度变化的R2的变化来进行修正的值。
作为考虑这样的二次电阻修正的现有的矢量控制装置,具有例如在日本专利申请公开公报特开平6-343282号中所记载的矢量控制装置。图12是表示该现有的矢量控制装置的构成的方框图。在图12中,49是用于根据二次磁通指令值Ф2*和转矩指令TM*来控制作为控制对象的感应电动机55的矢量控制部,50是输入感应电动机旋转角频率ωr来进行感应电动机旋转角频率ωr的波形解析的波形解析部,51是用于通过波形解析部50的输出来调整参数(在此是二次电阻设定值)的参数调整部,52是从速度指令ωr*减去感应电动机旋转角频率ωr而计算速度偏差的减法器,53是速度控制器,根据由减法器52求出的速度指令ωr*和感应电动机旋转角频率ωr的偏差来输出转矩指令TM*,以使感应电动机旋转角频率ωr跟踪速度指令ωr*。54是根据从矢量控制部49所输出的一次电流指令值I1*来控制一次电流值I1的功率变换装置,55是根据该一次电流值I1而以预定的速度和转矩旋转的作为控制对象的感应电动机,56是检测感应电动机55的旋转速度ωr的速度检测器。57和58是分别设定在矢量控制部49内部的二次电阻R2的系数设定器。下面以二次电阻修正方式为中心,对现有技术的动作进行说明。
在现有技术中,为了进行二次电阻修正运算,输入使速度指令ωr*分步变化的信号。使速度指令ωr*分步变化时的感应电动机旋转角频率ωr的波形被存储在波形解析部50中,来算出响应波形的特征量。由波形解析部50所算出的特征量被输入参数调整部51,来算出二次电阻设定值R2的修正量,修正在系数设定器57和58中所设定的二次电阻R2的设定值。
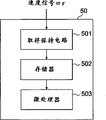
图13表示波形解析部50的构成例。感应电动机旋转角频率ωr的波形由取样保持电路501进行取样,并存储在存储器502中,由微处理器503算出特征量。下面对作为特征量使用的具体特性值及其计算方法进行描述。
参数调整部51的构成例与图13的波形解析部50相同,由微处理器和存储器所构成。其除了没有取样保持电路之外,与图13相同,因此,省略其图。在此情况下,在存储器中预先存储根据特征量的调整规则。
二次电阻的调整作用是:由波形解析部50算出怎样的特征量,使用该特征量由参数调整部51决定怎样的二次电阻的修正量,按照调整规则来决定。使用图14来说明调整规则的例子。图14是表示二次电阻R2的误设定对速度的分步响应波形产生的影响的模拟结果。由于响应波形受到速度控制器53的传递函数的影响,为了简化起见,图14的响应波形仅把速度控制器53的传递函数作成比例要素。
当使二次电阻R2的真值为R2*时,图14(a)是设定在矢量控制装置中的二次电阻R2的值为真值R2*(R2=R2*)的情况。此时,由于作为速度控制器53的输出的转矩指令TM*与感应电动机55实际的发生转矩TM相等,故与转矩指令TM*相对应的感应电动机55的速度ωr的传递函数为下式(4)。其中,J是感应电动机55的转动惯量,S是拉普拉斯算子。
(ωr/TM*)=(1/J·S) …(4)
因此,如果使速度控制器53的比例增益为GP,与速度指令ωr*相对应的速度ωr的闭环传递函数Gω为下式这样:
Gω=(ωr/ωr*)=[GP/J·S]/[1+GP/J·S]
=1/[1+GP/J·S] …(5)
上式(5)是使时间常数为J/GP的一次延迟部件的传递函数,其分步响应波形由下式(6)所表示。其中,速度指令的分步量为△ω。ωr(t)={1-exp[-(GP/J)t]}△ω …(6)
图14(a)表示上式的波形。图14(b)是R2>R2*时,即设定在矢量控制装置中的二次电阻R2的值大于真值R2*的情况。在此情况下,由于发生转矩变得过大,而响应发生过冲,与R2=R2*时相比,提速变快。
图14(c)是R2<R2*时,即设定在矢量控制装置中的二次电阻R2的值小于真值R2*的情况。在此情况下,由于发生转矩变得过小,故速度到达最终值的时间变长,与R2=R2*时相比,提速变慢。
如上述那样,二次电阻R2的误设定能够作为速度的分步响应波形的差异来观测。作为响应波形的特征量之差来算出其差异,而用于二次电阻的调整。
能够使用各种量作为特征量。其一个例子是:把速度ωr到达分步量△ω的95%的时间T95即上升时间作为特征量。当二次电阻的设定正确时,响应波形由(6)式所表示,因此,上升时间T95*按下式那样为时间常数(J/GP)的函数。
T95*=(J/GP)ln(20)=2.996(J/GP) …(7)
如从图14所看到的那样,R2>R2*时的分步响应波形的T95小于上式(7)的T95*,R2<R2*时的T95大于上式的T95*。
这样,二次电阻R2的调整能够用下述的(1)~(3)的调整规则来修正。
(1)通过速度控制使速度指令ωr*分步变化,测定其间的速度ωr的上升时间T95,
(2)如果速度ωr的上升时间T95为T95<T95*,由于R2>R2*,因此,减小设定在矢量控制装置的二次电阻R2值,
(3)如果速度ωr的上升时间T95为T95>T95*,由于R2<R2*,因此,增大设定在矢量控制装置的二次电阻R2值。
下面表示具体例子。在图13中,通过速度控制使速度指令ωr*分步变化,在存储器502中存储以适当取样周期对其间的速度ωr的响应波形进行取样的值。由微处理器503从存储的响应波形来算出上升时间T95,作为特征量,输出给参数调整部51。在参数调整部51中,把T95和T95*进行比较,按下式(8)那样来决定二次电阻设定值R2的修正值△R2。
△R2=Kr(T95-T95*) …(8)
Kr是用于从特征量决定修正量的增益。把这样求出的△R2与目前的二次电阻设定值相加,来计算出新的R2,修正向矢量控制装置的设定值,再次进行上述感应电动机旋转速度的分步响应。
现有的能够自动调整感应电动机的二次电阻的设定值的感应电动机的矢量控制装置具有以上那样的构成和动作,在该方式下,能够调整二次电阻的设定值,但在不具有速度指令ωr*的矢量控制装置的情况下,在现有的方式中,存在不能修正二次电阻的问题。而且,即使在具有速度指令的矢量控制装置中,在运转中不使速度指令分步变化的用途中,为了进行二次电阻修正,必须进行特别运转处理。
如以上那样,上述现有的矢量控制装置,作为能够自动调整感应电动机的二次电阻的设定值的感应电动机的矢量控制装置,很难被称为完善的方式。
鉴于上述问题,本发明的目的是提供一种感应电动机的矢量控制装置,与速度指令的有无无关,特别是不需要用于二次电阻调整的特别的信号,能够用简单的方式自动地调整二次电阻的设定值。
本发明提供一种感应电动机的矢量控制装置,其特征在于,包括:矢量控制指令运算装置,根据转矩指令值T*、二次磁通指令值Ф2*以及作为控制对象的感应电动机的感应电动机常数,来算出d轴电流指令值IDR,q轴电流指令值IQR以及滑差角频率指令值ωs*;旋转角频率运算装置,算出感应电动机旋转角频率ωr;变换器角频率运算装置,把滑差角频率ωs*与旋转角频率ωr相加,来算出变换器角频率ωinv;dq轴前馈电压运算装置,使用d轴电流指令值IDR、q轴电流指令值IQR、感应电动机常数以及变换器角频率ωinv,来算出d轴前馈电压指令值E1DFF和q轴前馈电压指令值E1QFF;前馈电压矢量运算装置,算出d轴前馈电压指令值E1DFF和q轴前馈电压指令值E1QFF各自的平方和的平方根值,来算出前馈电压指令值E1F;反馈电流运算装置,从感应电动机的三相电流值来算出d轴反馈电流IDF和q轴反馈电流IQF;补偿电压运算装置,从d轴电流指令值IDR和d轴反馈电流IDF的偏差算出d轴补偿电压E1DFB,同时,从q轴电流指令值IQR和q轴反馈电流IQF的偏差算出q轴补偿电压E1QFB;dq轴电压指令值运算装置,把d轴补偿电压E1DFB与d轴前馈电压指令值E1DFF相加来算出d轴电压指令值E1DR,同时,把q轴补偿电压E1QFB与q轴前馈电压指令值E1QFF相加来算出q轴电压指令值E1QR;电压矢量运算装置,算出d轴电压指令值E1DR和q轴电压指令值E1QR各自的平方和的平方根值,求出电压指令值E1R;以及二次电阻修正值运算装置,调整二次电阻的修正值△R2,以使前馈电压指令值E1F和电压指令值E1R的偏差为零,并且矢量控制指令运算装置使用由二次电阻的修正值△R2所修正的感应电动机常数,来算出滑差角频率指令值ωs*,由此,进行感应电动机的矢量控制。
此外,进一步包括限制器,设置在二次电阻修正值运算装置与矢量控制指令运算装置之间,把二次电阻的修正值△R2限制在预定范围内。
此外,进一步包括第一切换器,设置在二次电阻修正值运算装置与矢量控制指令运算装置之间,根据电压指令值E1R的值,切换是否向矢量控制指令运算装置输入二次电阻的修正值△R2的值。
此外,本发明提供一种感应电动机的矢量控制装置,其特征在于,包括:矢量控制指令运算装置,根据转矩指令值T*、二次磁通指令值Ф2*以及作为控制对象的感应电动机的感应电动机常数,来算出d轴电流指令值IDR、q轴电流指令值IQR以及滑差角频率指令值ωs*;旋转角频率运算装置,算出感应电动机旋转角频率ωr;变换器角频率运算装置,把滑差角频率ωs*与旋转角频率ωr相加,来算出变换器角频率ωinv;dq轴前馈电压运算装置,使用d轴电流指令值IDR、q轴电流指令值IQR、感应电动机常数以及变换器角频率ωinv,来算出d轴前馈电压指令值E1DFF和q轴前馈电压指令值E1QFF;前馈电压矢量运算装置,算出d轴前馈电压指令值E1DFF和q轴前馈电压指令值E1QFF各自的平方和的平方根值,来算出前馈电压指令值E1F;反馈电流运算装置,从感应电动机的三相电流值来算出d轴反馈电流IDF和q轴反馈电流IQF;补偿电压运算装置,从d轴电流指令值IDR和d轴反馈电流IDF的偏差算出d轴补偿电压E1DFB,同时,从q轴电流指令值IQR和q轴反馈电流IQF的偏差算出q轴补偿电压E1QFB;dq轴电压指令值运算装置,把d轴补偿电压E1DFB与d轴前馈电压指令值E1DFF相加来算出d轴电压指令值E1DR,同时,把q轴补偿电压E1QFB与q轴前馈电压指令值E1QFF相加来算出q轴电压指令值E1QR;电压矢量运算装置,算出d轴电压指令值E1DR和q轴电压指令值E1QR各自的平方和的平方根值,求出电压指令值E1R;以及滑差角频率修正值运算装置,调整滑差角频率的修正值△ωs,以使前馈电压指令值E1F和电压指令值E1R的偏差为零,并且变换器角频率运算装置使用由滑差角频率的修正值△ωs所修正的滑差角频率,来算出变换器角频率ωinv,由此,进行感应电动机的矢量控制。
此外,进一步包括限制器,设置在滑差角频率修正值运算装置与变换器角频率运算装置之间,把滑差角频率的修正值△ωs的值限制在预定范围内。
此外,进一步包括第一修正装置,设置在滑差角频率修正值运算装置与变换器角频率运算装置之间,根据转矩指令值T*来修正滑差角频率的修正值△ωs的值。
此外,进一步包括第二修正装置,设置在滑差角频率修正值运算装置与变换器角频率运算装置之间,根据q轴电流指令值IQR来修正滑差角频率的修正值△ωs的值。
此外,进一步包括第二切换器,设置在滑差角频率修正值运算装置与变换器角频率运算装置之间,根据电压指令值E1R的值,切换是否向变换器角频率运算装置输入滑差角频率的修正值△ωs的值。
本发明的这些和其他的目的、优点及特征将通过结合附图对本发明的实施例的描述而得到进一步说明。在这些附图中:
图1是表示本发明的实施例1所涉及的感应电动机的矢量控制装置的构成的方框图;
图2是表示本发明的实施例1所涉及的感应电动机的矢量控制装置的动作原理的曲线图;
图3是表示设在本发明的实施例1所涉及的感应电动机的矢量控制装置中的二次电阻修正值运算部的构成的方框图;
图4是表示本发明的实施例2所涉及的感应电动机的矢量控制装置的构成的部分方框图;
图5是表示本发明的实施例3所涉及的感应电动机的矢量控制装置的构成的部分方框图;
图6是表示本发明的实施例4所涉及的感应电动机的矢量控制装置的构成的方框图;
图7是表示设在本发明的实施例4所涉及的感应电动机的矢量控制装置中的滑差角频率指令修正值运算部的构成的方框图;
图8是表示本发明的实施例5所涉及的感应电动机的矢量控制装置的构成的部分方框图;
图9是表示本发明的实施例6所涉及的感应电动机的矢量控制装置的构成的部分方框图;
图10是表示本发明的实施例7所涉及的感应电动机的矢量控制装置的构成的部分方框图;
图11是表示本发明的实施例8所涉及的感应电动机的矢量控制装置的构成的部分方框图;
图12是表示现有的矢量控制装置的构成的方框图;
图13是表示设在现有的矢量控制装置中的波形解析部的构成的方框图;
图14是表示现有的矢量控制装置的动作的模拟波形的曲线图。
下面说明本发明的各个实施例。
实施例1
图1是表示本发明的实施例1所涉及的感应电动机的矢量控制装置的构成的方框图。在图1中,1是矢量控制指令运算部,根据转矩指令值T*、二次磁通指令值Ф2*、二次电阻修正值△R2以及作为控制对象的感应电动机的感应电动机常数,来算出转矩电流指令值(q轴电流指令值)IQR、磁通电流指令值(d轴电流指令值)IDR以及滑差角频率指令值ωs*。2是前馈(以下称为F.F.)电压运算部,通过上述转矩电流指令值IQR、上述磁通电流指令值IDR以及下述的变换器角频率ωinv,来算出d轴前馈电压指令值E1DFF和q轴前馈电压指令值E1QFF。
3是第一减法器,求出转矩电流指令值IQR和下述的转矩反馈电流IQF的偏差△IQ,4是第二减法器,求出磁通电流指令值IDR和下述的磁通反馈电流IDF的偏差△ID,5是第一加法器,把感应电动机旋转角频率ωr与滑差角频率指令值ωs*相加,并输出变换器角频率ωinv。
6是第一恒流补偿部,输入偏差△IQ,输出补偿电压E1QFB。7是第二恒流补偿部,输入偏差△ID,输出补偿电压E1DFB。8是积分器,积分变换器角频率ωinv,来决定d-q坐标上的相位θ。9是角频率运算部,把下述的脉冲发生器20的输出脉冲信号变换为感应电动机旋转角频率ωr。
10是二次电阻修正值运算部,根据d轴F.F.电压指令值E1DFF、q轴F.F.电压指令值E1QFF、转矩电流指令值IQR、磁通电流指令值IDR以及下述的电压指令值E1QR、E1DR,来算出二次电阻修正值△R2。11是第二加法器,把q轴F.F.电压指令值E1QFF与补偿电压E1QFB相加,并输出电压指令值E1QR。12是第三加法器,把q轴F.F.电压指令值E1QFF与补偿电压E1DFB相加,并输出电压指令值E1DR。
13是第一坐标变换部,从用d-q坐标系所表示的d,q轴电压指令值E1DR,E1QR和d-q坐标系的相位θ变换为三相的电压指令值Vu,Vv,Vw。14是脉宽调制变换器,根据三相的电压指令值Vu,Vv,Vw向感应电动机19施加按照指令的电压。15是第二坐标变换部,从三相电流Iu,Iv,Iw和相位θ变换为d-q坐标上的q轴反馈电流IQF和d轴反馈电流IDF。16,17,18分别是检测U相,V相,W相的电流的第一,第二,第三电流检测器。19是作为矢量控制对象的感应电动机,20是检测感应电动机19的转数的脉冲发生器。
下面对其动作进行说明。在矢量控制指令运算部1中,使用转矩指令值T*、二次磁通指令值Ф2*、感应电动机19的电路常数和二次电阻修正值运算部10的输出△R2,来按照以下表示的(9)~(11)式来运算转矩电流指令值IQR、磁通电流指令值IDR以及滑差角频率指令值ωs*。 其中,P:电动机的极对数M*:电动机的互感设定值(H)L2*:电动机的二次自感设定值(H)R2*:电动机的二次电阻设定值(Ω)。
在上述(9)~(11)式中,加在感应电动机的电路常数M、L2、R2上的*表示是公称值或者设定值。
由矢量控制指令运算部1所求出的滑差角频率指令值ωs*,在第一加法器5中,与感应电动机旋转角频率ωr相加,而算出变换器角频率ωinv。
在前馈电压运算部2中,输入转矩电流指令值IQR、磁通电流指令值IDR和变换器角频率ωinv,使用以下(12)和(13)式来算出q轴F.F.电压指令值E1QFF和d轴F.F.电压指令值E1DFF。
E1QFF=R1*×IQR+ωinv×L1*×IDR …(12)
E1DFF=R1*×IDR-ωinv×L1*×σ×IDR …(13)
其中,
R1*:电动机的一次电阻设定值(Ω)
L1*:电动机的一次自感设定值(H)
σ:漏抗系数(=1-M*2/(R1*×L2*))。
第一恒流补偿部6根据作为第一减法器3的输出的偏差△IQ,而输出使q轴反馈电流IQF与转矩电流指令值IQR相一致的补偿电压E1QFB。第二恒流补偿部7同样根据作为第二减法器4的输出的偏差△ID,而输出使d轴反馈电流IDF与磁通电流指令值IDR相一致的补偿电压E1DFB。
第二加法器11把q轴F.F.电压指令值E1QFF与补偿电压E1QFB相加,来算出电压指令值E1QR。同样,第三加法器12把d轴F.F.电压指令值E1DFF与补偿电压E1DFB相加,来算出电压指令值E1DR。
第一坐标变换部13是把电压指令值E1QR、E1DR变换为三相的电压指令值Vu,Vv,Vw的坐标变换部,进行以下(14)式的运算。其中,θ是按上述那样在积分器8中所运算的d-q坐标系的相位。
脉宽调制变换器14根据三相的电压指令值Vu,Vv,Vw进行脉宽调制控制,施加按照指令的电压,来驱动感应电动机19。
另一方面,第二坐标变换部15是使用d-q坐标系的相位θ把在电流检测器16、17、18中所检测出的三相电流Iu,Iv,Iw变换为d-q坐标系上的电流IQF,IDF的坐标变换部,进行以下(15)式的运算。
以上对全体的动作进行了说明,下面对二次电阻修正值运算部10的动作原理进行说明。
在由矢量控制设定的感应电动机常数与实际的感应电动机常数完全一致的理想状态下,作为恒流补偿部6、7的输出的补偿电压E1QFB、E1DFB为零。换句话说,当感应电动机常数不一致时,E1QFB、E1DFB不为零。即,监视该d,q的补偿电压E1QFB、E1DFB的大小,如果调整由矢量控制指令运算部1设定的感应电动机常数以使其值为零,就能维持理想的矢量控制状态。
下面,考虑感应电动机常数与矢量控制性能的关系。在矢量控制中,作为感应电动机常数,分别设定一次、二次侧的电阻值和自感及互感。由于一次、二次侧的自感及互感相对于温度变化几乎没有变化,可以认为在感应电动机的运转状态中变化的因素是电阻值。
而且,电阻值中,一次电阻值的设定误差在感应电动机的输出电压大的区域中几乎对上述补偿电压E1QFB、E1DFB没有影响,并且,对输出转矩影响大的是二次电阻值的设定误差,而不是一次电阻值,考虑到上述因素,可以认为上述补偿电压输出相当于控制侧设定的二次电阻设定值和实际的二次电阻值的偏差。
在图2中表示了:用矢量表示控制侧设定的二次电阻与实际的感应电动机的二次电阻存在偏差时的d,q轴电压指令E1DR,E1QR时的电压矢量的变化。其中,用以下(16)式来定义比率K。
K=R2/R2* …(16)
其中,
R2:电动机的二次电阻值(实际值)(Ω)
R2*:控制侧二次电阻设定值(Ω)
当K=1.0时,即,感应电动机侧的二次电阻值R2与控制侧设定的二次电阻值R2*相一致时,电压为用图2中的粗线箭头表示的电压矢量。在此状态下,如上述那样,补偿电压E1QFB,E1DFB为零。这样,此时的电压指令仅由前馈电压指令值E1QFF,E1DFF决定,当把其大小定义为VPF时,用以下(17)式求出VPF:
下面考虑感应电动机的二次电阻值小于控制侧的二次电阻设定值的情况,例如,K=0.7时。在此情况下,由于滑差频率被设定得较大,反馈电流相对于电流指令值变大,恒流补偿部6、7的动作的结果是:向使电压指令E1QR,E1DR减小的方向进行修正。该电压矢量变为图2的A,当把电压的大小定义为VPA时,用以下(18)式求出VPA: …(18)
在此状态下的电压矢量的大小,如图2所示的那样,成为以下(19)式的关系。
VPF>VPA …(19)
另一方面,当感应电动机的二次电阻值大于控制侧的二次电阻设定值时,例如,K=1.3时,按照与K=0.7时相反的想法,电压矢量变为图2的B,当把此时的电压矢量的大小定义为VPB时,VPB与VPF的关系可以与上述相同进行考虑,而用以下(20)式表示:
VPF<VPB …(20)
若归纳上述关系,为以下这样:
当R2<R2*时,VPA<VPF
当R2>R2*时,VPB>VPF
在二次电阻修正值运算部10中,按照上述动作原理,来运算二次电阻修正值△R2。在图3中表示了二次电阻修正值运算部10的内部构成图。
在图3中,101~104分别是第一~第四乘法器,分别算出d,q轴电压指令值E1DR,E1QR和d,q轴F.F.电压指令值E1QFF,E1DFF的平方值。105是第四加法器,把d,q轴电压指令值E1DR,E1QR的各自的平方值相加。106是第五加法器,把d,q轴F.F.电压指令值E1QFF,E1DFF的各自的平方值相加。107是第一运算器,运算d,q轴电压指令值E1DR,E1QR的平方和的平方根E1R。108是第二运算器,运算d,q轴F.F.电压指令值E1QFF,E1DFF的平方和的平方根E1F。109是第三减法器,从E1R减去E1F,来算出电压偏差△E1。110是控制器,运算使电压偏差△E1为零的修正值dsr。111是第五乘法器,把磁通电流指令值IDR乘以修正值dsr。112是第一除法器,用转矩电流指令值IQR除第五乘法器111的运算结果。113是第六乘法器,通过把感应电动机常数L1*乘以第一除法器112的运算结果,来算出二次电阻修正值△R2。
下面对二次电阻修正值运算部10的动作进行说明。在二次电阻修正值运算部10中,输入d,q轴F.F.电压指令值E1QFF,E1DFF和d,q轴电压指令值E1DR,E1QR以及转矩电流指令值IQR、磁通电流指令值IDR。接着,如图3所示的那样,算出作为E1QFF和E1DFF的各自的平方和的平方根值的E1F。同样,算出作为E1DR和E1QR的各自的平方和的平方根值的E1R。第三减法器109通过从E1R减去E1F,来算出电压偏差△E1,并输入第一控制器110。第一控制器110算出使电压偏差△E1为零的修正值dsr。接着,使用此时在矢量控制指令运算部1中由(9)、(10)式所算出的转矩电流指令值IQR、磁通电流指令值IDR和感应电动机一次自感设定值L1*来算出二次电阻修正值△R2,把其结果输出给矢量控制指令运算部1。
在矢量控制指令运算部1中,使用二次电阻修正值△R2来通过(11)来算出滑差角频率指令值ωs*。
控制器110可以使用通常的比例积分器,但由于随着温度变化的二次电阻的变化比较缓慢,故用积分运算器就足够了。
这样,采用图1所示的本实施例中的感应电动机的矢量控制装置,在二次电阻修正值运算部10中,算出二次电阻修正值△R2,在矢量控制指令运算部1中,通过(11)式来算出滑差角频率指令值ωs*,由此,即使在成为控制对象的感应电动机19存在伴随着温度变化的二次电阻的变化的情况下,用于能够自动地调整由矢量控制设定的二次电阻,即使是没有速度指令的矢量控制装置和具有速度指令的矢量控制装置,并且,即使在运转中不使速度指令分步变化的用途中,不需要用于二次电阻的调整的特别的信号,使用内部的控制信号,就能以简单的方式来进行二次电阻修正,而能够与感应电动机的温度无关来维持矢量控制状态。这样,通过补偿伴随着温度变化的二次电阻,在使电动机输出转矩与指令值相一致的同时,能够维持高速转矩响应性能。
实施例2
图4是表示本发明的实施例2所涉及的感应电动机的矢量控制装置的构成的部分方框图。在图4中,仅记载与上述图1不同的构成的部分,对于其他相同构成的部分则省略图示。在上述图1所示的矢量控制装置中,把由二次电阻修正值运算部10算出的二次电阻修正值△R2输入矢量控制指令运算部1,但在图4所示的本实施例中的矢量控制装置中,设置限制二次电阻修正值△R2的大小的限制器,把由限制器所限制的第二二次电阻修正值△R2A输出给矢量控制指令运算部1。
在图4中,21是第一限制器,限制二次电阻修正值△R2并输出第二二次电阻修正值△R2A。即,图4所示的矢量控制装置的构成是在图1所示的矢量控制装置的二次电阻修正值运算部10与矢量控制指令运算部1之间追加了第一限制器21。
下面对该实施例2的动作进行说明。向第一限制器21输入二次电阻修正值△R2。在第一限制器21中,预先设定矢量控制指令运算部1所使用的二次电阻修正值的最大值△R2max和最小值△R2min。
当所输入的二次电阻修正值△R2大于二次电阻修正值的最大值△R2max时,作为第二二次电阻修正值△R2A而输出二次电阻修正值的最大值△R2max。
并且,当所输入的二次电阻修正值△R2小于二次电阻修正值的最小值△R2min时,作为第二二次电阻修正值△R2A而输出二次电阻修正值的最小值△R2min。
当所输入的二次电阻修正值△R2小于二次电阻修正值的最大值△R2max并大于二次电阻修正值的最小值△R2min时,作为第二二次电阻修正值△R2A而原封不动地输出所输入的二次电阻修正值△R2。
在矢量控制指令运算部1中,使用第二二次电阻修正值△R2A代替二次电阻修正值△R2,来进行上述(11)的运算,而算出滑差角频率指令值ωs*。对于其他的动作,由于与上述实施例1相同,在此省略其说明。
如以上那样,在图4所示的该实施例中的矢量控制装置中,由于输入矢量控制指令运算部1的第二二次电阻修正值△R2A被第一限制器21限制在△R2max~△R2min之间,因此,能够避免二次电阻修正值△R2由于例如运算误差等成为在使用范围内没有的值,而能够防止这样引起的误动作。
实施例3
图5是表示本发明的实施例3所涉及的感应电动机的矢量控制装置的构成的部分方框图。在上述图1和图4的矢量控制装置中,在二次电阻修正值运算部10中运算二次电阻修正值△R2,而在图5所示的实施例的矢量控制装置中,根据电压指令值E1R的大小来设定二次电阻修正值△R2。
在图5中,22是第一指令切换部,把电压指令值E1R、二次电阻修正开始电压E1RS和二次电阻修正结束电压E1RE作为输入,而输出切换信号cs1。23是第一选择开关,根据来自第一指令切换部22的切换信号cs1来选择二次电阻修正值△R2或者零。其中,二次电阻修正开始电压E1RS和二次电阻修正结束电压E1RE可以预选先定适当的值,并且,也可以通过用户等适当地输入预定的值。图5所示的矢量控制装置的构成可以用于上述图1或图4所示的矢量控制装置。
下面对图5所示的矢量控制装置的动作进行说明。第一指令切换部22把在二次电阻修正值运算部10中所运算的电压E1R与二次电阻修正开始电压E1RS和二次电阻修正结束电压E1RE进行比较,按以下所示的逻辑作为低电平(L)或高电平(H)输出切换信号cs1。
E1RS≤E1R≤E1RE:cs1=H
除此之外:cs1=L
第一选择开关23输入来自第一指令切换部22的切换信号cs1,当切换信号cs1为低电平(L)时,把第二二次电阻修正值△R2B设定为零,另一方面,当切换信号cs1为高电平(H)时,设定在二次电阻修正值运算部10中所运算的二次电阻修正值△R2作为第二二次电阻修正值△R2B。并且,第二二次电阻修正值△R2B的输出目的地,在把本实施例用于图1的构成的情况下,为矢量控制指令运算部1(图1);在用于图4的构成的情况下,为限制器21(图4)。由于其他的动作与图1所示的矢量控制装置相同,在此省略其说明。
如以上那样,在图5所示的本实施例的矢量控制装置中,能够依照电压指令值E1R的大小,把输入矢量控制指令运算部1的第二二次电阻修正值△R2B设定为由二次电阻修正值运算部10所运算的二次电阻修正值△R2或者零中的一方,因此,能够设定是否进行二次电阻的修正的动作范围,例如,在由于一次电阻设定误差等二次电阻修正值△R2的误差容易变大的电压指令E1R的值较小的区域中(即,电压指令E1R小于E1RS的值的情况下),能够回避二次电阻修正运算。
实施例4
图6是表示本发明的实施例4所涉及的感应电动机的矢量控制装置的构成。在上述图1、图4、图5所示的矢量控制装置中,在二次电阻修正值运算部10中运算二次电阻修正值△R2,由矢量控制指令运算部1使用(11)式来运算滑差角频率指令值ωs*,而在图6所示的实施例的矢量控制装置中,取代二次电阻修正值运算部10,而设置滑差角频率指令修正值运算部30,在滑差角频率指令修正值运算部30中运算滑差角频率的修正值△ωs,把滑差角频率的修正值△ωs与滑差角频率指令值ωs*相加。
在图6中,30是滑差角频率指令修正值运算部,分别根据F.F.电压指令值E1QFF和E1DFF、电压指令值E1QR和E1DR来运算滑差角频率的修正值△ωs。24是第六加法器,把滑差角频率的修正值△ωs与由矢量控制指令运算部1所运算的滑差角频率指令值ωs*相加,来算出第二滑差角频率指令值ωs2*。其他的构成与图1所示的矢量控制装置的构成相同。
图7表示滑差角频率指令修正值运算部30的构成。滑差角频率指令修正值运算部30按照图7所示的那样具有与到图3所示的二次电阻修正值运算部10的控制器110之前的前级部分相同的构成,把由二次电阻修正值运算部10所运算的修正值dsr原封不动地作为滑差角频率的修正值△ωs而输出。
下面,以与图1所示的矢量控制装置不同的部分为中心,对图6所示的矢量控制装置的动作进行说明。滑差角频率指令修正值运算部30,用与图3所示的二次电阻修正值运算部10相同的处理,来运算E1R和E1F,算出其偏差△E1为零的修正值。由滑差角频率指令修正值运算部30输出该修正值作为滑差角频率的修正值△ωs。
第六加法器24把滑差角频率的修正值△ωs与由矢量控制指令运算部1所运算的滑差角频率指令值ωs*相加,来算出第二滑差角频率指令值ωs2*。图6所示的矢量控制装置根据第二滑差角频率指令值ωs2*来对感应电动机19进行矢量控制。
在矢量控制指令运算部1中,按上述(11)式使△R2成为零来实施滑差角频率指令值ωs*的运算。
如以上那样,在图6所示的本实施例的矢量控制装置中,把运算二次电阻R2的变动作为滑差角频率修正值,来修正滑差角频率指令值,因此,不直接运算二次电阻修正值,而能够以更简单的方式得到与图1所示的矢量控制装置同等的性能。
实施例5
图8是表示本发明的实施例5所涉及的感应电动机的矢量控制装置的构成。在上述图6所示的矢量控制装置中,把由滑差角频率指令修正值运算部30运算的滑差角频率的修正值△ωs输入第六加法器24,而在图8所示的矢量控制装置中,设置限制滑差角频率的修正值△ωs的大小的限制器,把由限制器所限制的第二滑差角频率修正值△ωs2输入第六加法器24。
在图8中,25是限制器,限制滑差角频率的修正值△ωs,输出第二滑差角频率修正值△ωs2。图8所示的矢量控制装置构成是在图6所示的矢量控制装置的滑差角频率指令修正值运算部30与第六加法器24之间追加了限制器25的构成。
下面对该实施例5的动作进行说明。向限制器25输入滑差角频率的修正值△ωs。限制器25设定滑差角频率的修正值的最大值△ωsmax和最小值△ωsmin。
当所输入的滑差角频率的修正值△ωs大于滑差角频率的修正值的最大值△ωzsmax时,输出滑差角频率的修正值的最大值△ωsmax作为第二滑差角频率修正值△ωs2。
当所输入的滑差角频率的修正值△ωs小于滑差角频率的修正值的最小值△ωsmin时,输出滑差角频率的修正值的最小值△ωsmin作为第二滑差角频率修正值△ωs2。
当所输入的滑差角频率的修正值△ωs小于滑差角频率的修正值的最大值△ωsmax并大于滑差角频率的修正值的最小值△ωsmin时,原封不动地输出所输入的滑差角频率的修正值△ωs作为第二滑差角频率修正值△ωs2。
在第六加法器24中,取代滑差角频率的修正值△ωs,把第二滑差角频率修正值△ωs2与由矢量控制指令运算部1所运算的滑差角频率指令值ωs*相加,来运算第二滑差角频率指令值ωs2*。
如以上那样,在图8所示的本实施例的矢量控制装置中,由于由限制器25来限制滑差角频率的修正值△ωs的值,故能够避免滑差角频率的修正值△ωs由于例如运算误差等而成为在使用范围中不能得到的值。
实施例6
图9是表示本发明的实施例6所涉及的感应电动机的矢量控制装置的构成的部分方框图。在上述图6和图8所示的矢量控制装置中,输入第六加法器24或者限制器25的滑差角频率的修正值△ωs或者△ωs2不是依赖于转矩指令值T*的,而在图9所示的本实施例的矢量控制装置中,是运算用转矩指令值修正的第三滑差角频率修正值△ωs3*,把其值输入第六加法器24(图6)或者限制器25(图8)的。
在图9中,26是第五乘法器,把滑差角频率的修正值△ωs与修正系数KT相乘,输出第三滑差角频率修正值△ωs3*。27是第二除法器,用转矩指令基准值Ts*除转矩指令值T*,而输出修正系数KT。其中,转矩指令基准值Ts*可以是预先设定的预定值,并且,可以由用户等输入。图9所示的矢量控制装置的其他的构成与图6和图8所示的矢量控制装置的构成相同,图9所示的矢量控制装置的功能可以用于图6和图8所示的矢量控制装置。
下面对图9所示的实施例6的矢量控制装置的动作进行说明。由第二除法器27来算出转矩指令值T*对转矩指令基准值Ts*的比率,作为修正系数KT输出给第五乘法器26。在第五乘法器26中,把滑差角频率的修正值△ωs与修正系数KT相乘,把相乘结果作为第三滑差角频率修正值△ωs3*输出给第六加法器24或者限制器25。
在第六加法器24中,取代滑差角频率的修正值△ωs,把第三滑差角频率修正值△ωs3*与滑差角频率指令值ωs*相加,来算出第二滑差角频率指令值ωs2*。在限制器25中,取代滑差角频率的修正值△ωs,输入第三滑差角频率修正值△ωs3*。其他的动作与上述实施例4和5相同。
如以上那样,在图9所示的实施例的矢量控制装置中,考虑转矩指令值T*来算出第三滑差角频率修正值△ωs3*,因此,能够防止例如转矩指令值T*在运转中发生变动的情况下的控制器110(图7)的响应滞后所引起的滑差角频率修正值的调整滞后。
实施例7
图10是表示本发明的实施例7所涉及的矢量控制装置的构成的部分方框图。在上述图9所示的矢量控制装置中,通过转矩指令值T*来运算修正系数KT,而在图10的矢量控制装置中,使用q轴电流指令值IQR来取代转矩指令值T*,设定q轴电流基准值IQRS来取代转矩指令基准值Ts*,来运算修正系数KI。
在图10中,28是第六乘法器,把滑差角频率的修正值△ωs与修正系数KI相乘,而输出第四滑差角频率修正值△ωs4*。29是第三除法器,用q轴电流基准值IQRS除q轴电流指令值IQR,而输出修正系数KI。其中,q轴电流基准值IQRS可以是预先设定的预定值,并且,可以由用户等适当地输入。图10所示的矢量控制装置的其他的构成与图6和图8所示的矢量控制装置的构成相同,图10所示的矢量控制装置的功能可以用于图6和图8所示的矢量控制装置。
下面对图10所示的实施例7的矢量控制装置的动作进行说明。由第三除法器29来运算q轴电流指令值IQR对q轴电流基准值IQRS的比率,作为修正系数KI输出给第六乘法器28。在第六乘法器28中,把滑差角频率的修正值△ωs与修正系数KI相乘,把相乘结果作为第四滑差角频率修正值△ωs4*输出给第六加法器24或者限制器25。
在第六加法器24中,取代滑差角频率的修正值△ωs,把第四滑差角频率修正值△ωs4*与滑差角频率指令值ωs*相加,来算出第二滑差角频率指令值ωs2*。在限制器25中,取代滑差角频率的修正值△ωs,输入第四滑差角频率修正值△ωs4*。其他的动作与上述实施例4和5相同。
如以上那样,在图10所示的实施例的矢量控制装置中,考虑q轴电流指令值IQR来算出第四滑差角频率修正值△ωs4*,因此,能够防止例如q轴电流指令值IQR在运转中发生变动的情况下的控制器110(图7)的响应滞后所引起的滑差角频率修正值的调整滞后。
实施例8
图11是表示本发明的实施例8所涉及的感应电动机的矢量控制装置的构成的部分方框图。在上述图6和图8~图10的矢量控制装置中,在滑差角频率指令修正值运算部30中运算滑差角频率的修正值△ωs,而在图11所示的本实施例的矢量控制装置中,是根据电压指令值E1R的大小来设定滑差角频率的修正值△ωs。
在图11中,41是第二选择开关,根据来自第二指令切换部22A的切换信号cs1来选择滑差角频率的修正值△ωs或者零。并且,第二指令切换部22A的构成和动作与图5的第一指令切换部22相同。图11所示的矢量控制装置的构成可以用于图6和图8~图10所示的矢量控制装置。
下面对图11所示的矢量控制装置的动作进行说明。第二选择开关41输入来自第二指令切换部22A的切换信号cs1,当切换信号cs1为低电平(L)时,把第五滑差角频率修正值△ωs5*设定为零,当切换信号cs1为高电平(H)时,设定在滑差角频率指令修正值运算部30中所运算的滑差角频率的修正值△ωs来作为第五滑差角频率修正值△ωs5*。
图11的构成可以用于上述图6和图8~图10任一种构成,因此,在各个情况下,第五滑差角频率修正值△ωs5*可以输出给第六加法器24(图6)、限制器25(图8)、第五乘法器26(图9)或者第六乘法器28(图10)之任一。由于图11所示的矢量控制装置的其他动作与图6和图8~图10所示的矢量控制装置相同,而省略其说明。
如以上那样,在图11的矢量控制装置中,可以根据电压指令值E1R把第五滑差角频率修正值△ωs5*设定为由滑差角频率指令修正值运算部30所运算的滑差角频率的修正值△ωs或者零,因此,能够设定是否进行滑差角频率的修正的动作范围,例如,在由于一次电阻设定误差等滑差角频率的修正值△ωs的误差容易变大的电压指令E1R的值较小的区域中,能够回避二次电阻修正运算。
发明的效果
本发明提供一种感应电动机的矢量控制装置,其特征在于,包括:矢量控制指令运算装置,根据转矩指令值T*、二次磁通指令值Ф2*以及作为控制对象的感应电动机的感应电动机常数,来算出d轴电流指令值IDR、q轴电流指令值IQR以及滑差角频率指令值ωs*;旋转角频率运算装置,算出感应电动机旋转角频率ωr;变换器角频率运算装置,把滑差角频率ωs*与旋转角频率ωr相加,来算出变换器角频率ωinv;dq轴前馈电压运算装置,使用d轴电流指令值IDR、q轴电流指令值IQR、感应电动机常数以及变换器角频率ωinv,来算出d轴前馈电压指令值E1DFF和q轴前馈电压指令值E1QFF;前馈电压矢量运算装置,算出d轴前馈电压指令值E1DFF和q轴前馈电压指令值E1QFF各自的平方和的平方根值,来算出前馈电压指令值E1F;反馈电流运算装置,从感应电动机的三相电流值来算出d轴反馈电流IDF和q轴反馈电流IQF;补偿电压运算装置,从d轴电流指令值IDR和d轴反馈电流IDF的偏差算出d轴补偿电压E1DFB,同时,从q轴电流指令值IQR和q轴反馈电流IQF的偏差算出q轴补偿电压E1QFB;dq轴电压指令值运算装置,把d轴补偿电压E1DFB与d轴前馈电压指令值E1DFF相加来算出d轴电压指令值E1DR,同时,把q轴补偿电压E1QFB与q轴前馈电压指令值E1QFF相加来算出q轴电压指令值E1QR;电压矢量运算装置,算出d轴电压指令值E1DR和q轴电压指令值E1QR各自的平方和的平方根值,求出电压指令值E1R;以及二次电阻修正值运算装置,调整二次电阻的修正值△R2,以使前馈电压指令值E1F和电压指令值E1R的偏差为零,并且矢量控制指令运算装置使用由二次电阻的修正值△R2所修正的感应电动机常数,来算出滑差角频率指令值ωs*,由此,进行感应电动机的矢量控制。由此,具有这样的效果:与速度指令的有无无关,特别是不需要用于二次电阻的调整的特别信号,而能够实现用简单的方式自动调整二次电阻的设定值的感应电动机的矢量控制。
此外,进一步包括限制器,设置在二次电阻修正值运算装置与矢量控制指令运算装置之间,把二次电阻的修正值△R2限制在预定范围内。由此,具有这样的效果:能够避免二次电阻的修正值由于运算误差等而成为在使用范围内不能得到的某个值。
此外,进一步包括第一切换器,设置在二次电阻修正值运算装置与矢量控制指令运算装置之间,根据电压指令值E1R的值,切换是否向矢量控制指令运算装置输入二次电阻的修正值△R2的值。由此,具有这样的效果:能够进行是否进行二次电阻的修正的动作范围的设定,例如,在由于一次电阻设定误差等而二次电阻的修正值△R2的误差容易变大的电压指令E1R的值较小的区域中,能够回避进行修正。
此外,本发明提供一种感应电动机的矢量控制装置,其特征在于,包括:矢量控制指令运算装置,根据转矩指令值T*、二次磁通指令值Ф2*以及作为控制对象的感应电动机的感应电动机常数,来算出d轴电流指令值IDR、q轴电流指令值IQR以及滑差角频率指令值ωs*;旋转角频率运算装置,算出感应电动机旋转角频率ωr;变换器角频率运算装置,把滑差角频率ωs*与旋转角频率ωr相加,来算出变换器角频率ωinv;dq轴前馈电压运算装置,使用d轴电流指令值IDR、q轴电流指令值IQR、感应电动机常数以及变换器角频率ωinv,来算出d轴前馈电压指令值E1DFF和q轴前馈电压指令值E1QFF;前馈电压矢量运算装置,算出d轴前馈电压指令值E1DFF和q轴前馈电压指令值E1QFF各自的平方和的平方根值,来算出前馈电压指令值E1F;反馈电流运算装置,从感应电动机的三相电流值来算出d轴反馈电流IDF和q轴反馈电流IQF;补偿电压运算装置,从d轴电流指令值IDR和d轴反馈电流IDF的偏差算出d轴补偿电压E1DFB,同时,从q轴电流指令值IQR和q轴反馈电流IQF的偏差算出q轴补偿电压E1QFB;dq轴电压指令值运算装置,把d轴补偿电压E1DFB与d轴前馈电压指令值E1DFF相加来算出d轴电压指令值E1DR,同时,把q轴补偿电压E1QFB与q轴前馈电压指令值E1QFF相加来算出q轴电压指令值E1QR;电压矢量运算装置,算出d轴电压指令值E1DR和q轴电压指令值E1QR各自的平方和的平方根值,求出电压指令值E1R;以及滑差角频率修正值运算装置,调整滑差角频率的修正值△ωs,以使前馈电压指令值EIF和电压指令值E1R的偏差为零,并且变换器角频率运算装置使用由滑差角频率的修正值△ωs所修正的滑差角频率,来算出变换器角频率ωinv,由此,进行感应电动机的矢量控制。由此,具有这样的效果:与速度指令的有无无关,特别是不需要用于二次电阻的调整的特别信号,而能够实现用更简单的方式自动调整二次电阻的设定值的感应电动机的矢量控制。
此外,进一步包括限制器,设置在滑差角频率修正值运算装置与变换器角频率运算装置之间,把滑差角频率的修正值△ωs的值限制在预定范围内。由此,具有这样的效果:能够避免滑差角频率的修正值由于运算误差等而成为在使用范围内不能得到的某个值。
此外,进一步包括第一修正装置,设置在滑差角频率修正值运算装置与变换器角频率运算装置之间,根据转矩指令值T*来修正滑差角频率的修正值△ωs的值。由此,具有这样的效果:能够防止例如转矩指令值在运转中发生变动的情况下的控制器的响应滞后所引起的滑差角频率修正值的调整滞后。
此外,进一步包括第二修正装置,设置在滑差角频率修正值运算装置与变换器角频率运算装置之间,根据q轴电流指令值IQR来修正滑差角频率的修正值△ωs的值。由此,具有这样的效果:能够防止例如q轴电流指令值在运转中发生变动的情况下的控制器的响应滞后所引起的滑差角频率修正值的调整滞后。
此外,进一步包括第二切换器,设置在滑差角频率修正值运算装置与变换器角频率运算装置之间,根据电压指令值E1R的值,切换是否向变换器角频率运算装置输入滑差角频率的修正值△ωs的值。由此,具有这样的效果:能够根据电压指令值E1R来把滑差角频率的修正值△ωs设定为原值或者零,因此,能够进行是否进行滑差角频率的修正的动作范围的设定,例如,在由于一次电阻设定误差等滑差角频率的修正值△ωs的误差容易变大的电压指令E1R的值较小的区域中,能够回避二次电阻修正运算。
Claims (8)
1.一种感应电动机的矢量控制装置,其特征在于,包括:
矢量控制指令运算装置,根据转矩指令值T*、二次磁通指令值Ф2*以及作为控制对象的感应电动机的感应电动机常数,来算出d轴电流指令值IDR、q轴电流指令值IQR以及滑差角频率指令值ωS*;
旋转角频率运算装置,算出上述感应电动机旋转角频率ωr;
变换器角频率运算装置,把上述滑差角频率指令值ωs*与上述旋转角频率ωr相加,来算出变换器角频率ωinv;
dq轴前馈电压运算装置,使用上述d轴电流指令值IDR、上述q轴电流指令值IQR、上述感应电动机常数以及上述变换器角频率ωinv,来算出d轴前馈电压指令值E1DFF和q轴前馈电压指令值E1QFF;
前馈电压矢量运算装置,算出上述d轴前馈电压指令值E1DFF和上述q轴前馈电压指令值E1QFF各自的平方和的平方根值,来算出前馈电压指令值E1F;
反馈电流运算装置,从上述感应电动机的三相电流值来算出d轴反馈电流IDF和q轴反馈电流IQF;
补偿电压运算装置,从上述d轴电流指令值IDR和上述d轴反馈电流IDF的偏差算出d轴补偿电压E1DFB,同时,从上述q轴电流指令值IQR和上述q轴反馈电流IQF的偏差算出q轴补偿电压E1QFB;
dq轴电压指令值运算装置,把上述d轴补偿电压E1DFB与上述d轴前馈电压指令值E1DFF相加来算出d轴电压指令值E1DR,同时,把上述q轴补偿电压E1QFB与上述q轴前馈电压指令值E1QFF相加来算出q轴电压指令值E1QR;
电压矢量运算装置,算出上述d轴电压指令值E1DR和上述q轴电压指令值E1QR各自的平方和的平方根值,求出电压指令值E1R;以及
二次电阻修正值运算装置,调整二次电阻的修正值△R2的值,以使上述前馈电压指令值E1F和电压指令值E1R的偏差为零,
并且上述矢量控制指令运算装置使用由上述二次电阻的修正值△R2所修正的感应电动机常数,来算出滑差角频率指令值ωs*,由此,进行感应电动机的矢量控制。
2.根据权利要求1所述的感应电动机的矢量控制装置,其特征在于,进一步包括限制器,设置在上述二次电阻修正值运算装置与上述矢量控制指令运算装置之间,把上述二次电阻的修正值△R2的值限制在预定范围内。
3.根据权利要求1或2所述的感应电动机的矢量控制装置,其特征在于,进一步包括第一切换器,设置在上述二次电阻修正值运算装置与上述矢量控制指令运算装置之间,根据上述电压指令值E1R的值,切换是否向上述矢量控制指令运算装置输入上述二次电阻的修正值△R2的值。
4.一种感应电动机的矢量控制装置,其特征在于,包括:
矢量控制指令运算装置,根据转矩指令值T*、二次磁通指令值Φ2*以及作为控制对象的感应电动机的感应电动机常数,来算出d轴电流指令值IDR、q轴电流指令值IQR以及滑差角频率指令值ωS*;
旋转角频率运算装置,算出上述感应电动机旋转角频率ωr;
变换器角频率运算装置,把上述滑差角频率指令值ωs*与旋转角频率ωr相加,来算出变换器角频率ωinv;
dq轴前馈电压运算装置,使用上述d轴电流指令值IDR、上述q轴电流指令值IQR、上述感应电动机常数以及上述变换器角频率ωinv,来算出d轴前馈电压指令值E1DFF和q轴前馈电压指令值E1QFF;
前馈电压矢量运算装置,算出上述d轴前馈电压指令值E1DFF和上述q轴前馈电压指令值E1QFF各自的平方和的平方根值,来算出前馈电压指令值E1F;
反馈电流运算装置,从上述感应电动机的三相电流值来算出d轴反馈电流IDF和q轴反馈电流IQF;
补偿电压运算装置,从上述d轴电流指令值IDR和上述d轴反馈电流IDF的偏差算出d轴补偿电压E1DFB,同时,从上述q轴电流指令值IQR和上述q轴反馈电流IQF的偏差算出q轴补偿电压E1QFB;
dq轴电压指令值运算装置,把上述d轴补偿电压E1DFB与上述d轴前馈电压指令值E1DFF相加来算出d轴电压指令值E1DR,同时,把上述q轴补偿电压E1QFB与上述q轴前馈电压指令值E1QFF相加来算出q轴电压指令值E1QR;
电压矢量运算装置,算出上述d轴电压指令值E1DR和上述q轴电压指令值E1QR各自的平方和的平方根值,求出电压指令值E1R;以及
滑差角频率修正值运算装置,调整滑差角频率的修正值△ωs,以使上述前馈电压指令值E1F和电压指令值E1R的偏差为零,
并且上述变换器角频率运算装置使用由上述滑差角频率的修正值△ωs所修正的滑差角频率,来算出上述变换器角频率ωinv,由此,进行上述感应电动机的矢量控制。
5.根据权利要求4所述的感应电动机的矢量控制装置,其特征在于,进一步包括限制器,设置在上述滑差角频率修正值运算装置与上述变换器角频率运算装置之间,把上述滑差角频率的修正值△ωs的值限制在预定范围内。
6.根据权利要求4或5所述的感应电动机的矢量控制装置,其特征在于,进一步包括第一修正装置,设置在上述滑差角频率修正值运算装置与上述变换器角频率运算装置之间,根据上述转矩指令值T*来修正上述滑差角频率的修正值△ωs的值。
7.根据权利要求4或5所述的感应电动机的矢量控制装置,其特征在于,进一步包括第二修正装置,设置在上述滑差角频率修正值运算装置与上述变换器角频率运算装置之间,根据上述q轴电流指令值IQR来修正上述滑差角频率的修正值△ωs的值。
8.根据权利要求4所述的感应电动机的矢量控制装置,其特征在于,进一步包括第二切换器,设置在上述滑差角频率修正值运算装置与上述变换器角频率运算装置之间,根据上述电压指令值E1R的值,切换是否向上述变换器角频率运算装置输入上述滑差角频率的修正值△ωs的值。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP34895499A JP3520002B2 (ja) | 1999-12-08 | 1999-12-08 | 誘導電動機のベクトル制御装置 |
| JP348954/1999 | 1999-12-08 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1299184A true CN1299184A (zh) | 2001-06-13 |
| CN1175556C CN1175556C (zh) | 2004-11-10 |
Family
ID=18400519
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB001241079A Expired - Lifetime CN1175556C (zh) | 1999-12-08 | 2000-08-16 | 感应电动机的矢量控制装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US6335605B1 (zh) |
| JP (1) | JP3520002B2 (zh) |
| KR (1) | KR100364016B1 (zh) |
| CN (1) | CN1175556C (zh) |
| SG (1) | SG97891A1 (zh) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100345371C (zh) * | 2004-05-25 | 2007-10-24 | 三菱电机株式会社 | 电车控制装置 |
| CN100397779C (zh) * | 2003-05-08 | 2008-06-25 | 三菱电机株式会社 | 电动机的节能服务的提供方法及冷冻空调装置 |
| CN101841299A (zh) * | 2010-05-25 | 2010-09-22 | 大连理工大学 | 基于map图的电动汽车用驱动电机前馈矢量控制方法 |
| CN101237213B (zh) * | 2007-01-29 | 2010-11-03 | 三菱电机株式会社 | 交流旋转机的控制装置及使用该控制装置的交流旋转机的电常数测定方法 |
| CN101299590B (zh) * | 2007-03-13 | 2011-06-08 | 通用汽车环球科技运作公司 | 脉冲宽度调制逆变器的电流调节器的抗积分饱和控制 |
| CN101507101B (zh) * | 2006-09-26 | 2012-06-27 | 三菱电机株式会社 | 永磁体同步电动机的矢量控制装置 |
| CN109167548A (zh) * | 2018-09-16 | 2019-01-08 | 湖南沃森电气科技有限公司 | 一种异步电机矢量控制磁场定向矫正方法及其系统 |
| CN110635739A (zh) * | 2018-06-22 | 2019-12-31 | 大隈株式会社 | 位置控制装置 |
| CN111030534A (zh) * | 2019-12-20 | 2020-04-17 | 东南大学 | 一种永磁同步电机稳态运行方式下的参数辨识方法 |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100371370B1 (ko) * | 2000-08-18 | 2003-02-06 | 엘지산전 주식회사 | 벡터 제어장치 |
| US6630809B2 (en) * | 2001-11-29 | 2003-10-07 | Ballard Power Systems Corporation | System and method for induction motor control |
| US6646412B2 (en) * | 2002-02-11 | 2003-11-11 | Ford Global Technologies, Llc | Method and system for controlling torque in a powertrain that includes an induction motor |
| KR100442494B1 (ko) * | 2002-02-26 | 2004-07-30 | 엘지산전 주식회사 | 인버터의 토오크 제어장치 및 방법 |
| JP4613475B2 (ja) * | 2003-03-12 | 2011-01-19 | 株式会社安川電機 | 交流電動機のセンサレスベクトル制御方法及び制御装置 |
| EP1659684B1 (en) * | 2003-08-28 | 2010-04-07 | Mitsubishi Denki Kabushiki Kaisha | Controller of rotating machine |
| US6982533B2 (en) * | 2003-09-17 | 2006-01-03 | Rockwell Automation Technologies, Inc. | Method and apparatus to regulate loads |
| WO2006021075A1 (en) * | 2004-08-23 | 2006-03-02 | Agile Systems Inc. | System and method for sensor less magnetic field control of a motor |
| JP4455248B2 (ja) * | 2004-09-24 | 2010-04-21 | 三菱電機株式会社 | 誘導電動機のベクトル制御装置 |
| US7095209B2 (en) * | 2004-09-29 | 2006-08-22 | Rockwell Automation Technologies, Inc. | Method and apparatus to regulate torque provided to loads |
| FR2884658B1 (fr) * | 2005-04-13 | 2007-05-18 | Schneider Toshiba Inverter | Procede d'ajustement de parametres d'un moteur electrique et variateur de vitesse utilisant un tel procede |
| DE102006035891B4 (de) * | 2006-07-31 | 2009-04-16 | Sew-Eurodrive Gmbh & Co. Kg | Antrieb, umfassend einen Elektromotor, der von einem Umrichter gespeist ist, und Verfahren zur Regelung des Motorstromes bei einem von einem Umrichter gespeisten Elektromotor |
| DE102007027827B4 (de) * | 2006-08-01 | 2016-02-11 | Sew-Eurodrive Gmbh & Co Kg | Antrieb und Verfahren |
| ES2535540T3 (es) * | 2006-11-29 | 2015-05-12 | Mitsubishi Electric Corporation | Controlador para máquina giratoria de CA |
| EP1944862B1 (en) * | 2007-01-15 | 2011-08-03 | Hitachi Industrial Equipment Systems Co., Ltd. | Induction motor controller |
| KR101627221B1 (ko) * | 2009-11-13 | 2016-06-03 | 엘지전자 주식회사 | 전기 자동차의 모터 구동장치 |
| JP4897909B2 (ja) * | 2010-07-15 | 2012-03-14 | ファナック株式会社 | すべり周波数補正機能を有するセンサレス誘導モータの制御装置 |
| US9595889B2 (en) * | 2013-02-15 | 2017-03-14 | Eaton Corporation | System and method for single-phase and three-phase current determination in power converters and inverters |
| KR101759371B1 (ko) * | 2013-04-04 | 2017-07-18 | 엘에스산전 주식회사 | 유도전동기의 센서리스 벡터 제어 장치 |
| JP6243142B2 (ja) | 2013-05-21 | 2017-12-06 | Ntn株式会社 | 電気自動車の制御装置 |
| JP6241331B2 (ja) * | 2014-03-11 | 2017-12-06 | 日産自動車株式会社 | 電動機の制御装置 |
| US10044310B2 (en) * | 2015-03-16 | 2018-08-07 | Deere & Company | Methods of auto tuning machine parameters and systems thereof |
| KR101736006B1 (ko) * | 2016-04-01 | 2017-05-15 | 엘에스산전 주식회사 | 전류 지령 보정 장치 |
| US11290044B2 (en) | 2018-02-26 | 2022-03-29 | Hitachi Astemo Ltd. | Motor control device |
| KR102295930B1 (ko) | 2019-03-19 | 2021-08-30 | 엘에스일렉트릭(주) | 인버터 제어장치 |
| US20240022191A1 (en) * | 2022-07-18 | 2024-01-18 | Tula eTechnology, Inc. | Feedback scaling for electric machines |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61180592A (ja) * | 1985-02-05 | 1986-08-13 | Mitsubishi Electric Corp | 査導電動機の制御装置 |
| GB2261966B (en) * | 1991-11-30 | 1995-11-08 | Toshiba Kk | Driving control apparatus for induction motor |
| JP3257566B2 (ja) * | 1992-06-16 | 2002-02-18 | 株式会社安川電機 | 誘導電動機のpgレスベクトル制御装置 |
| JPH06343282A (ja) * | 1993-05-31 | 1994-12-13 | Toshiba Corp | 誘導電動機のベクトル制御装置 |
| JP3361885B2 (ja) * | 1994-06-28 | 2003-01-07 | 株式会社東芝 | 誘導電動機の制御装置 |
| JP3710621B2 (ja) * | 1998-05-29 | 2005-10-26 | 三菱電機株式会社 | 誘導電動機の制御装置 |
-
1999
- 1999-12-08 JP JP34895499A patent/JP3520002B2/ja not_active Expired - Fee Related
-
2000
- 2000-06-14 SG SG200003332A patent/SG97891A1/en unknown
- 2000-06-19 US US09/597,419 patent/US6335605B1/en not_active Expired - Lifetime
- 2000-08-07 KR KR1020000045628A patent/KR100364016B1/ko active IP Right Grant
- 2000-08-16 CN CNB001241079A patent/CN1175556C/zh not_active Expired - Lifetime
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100397779C (zh) * | 2003-05-08 | 2008-06-25 | 三菱电机株式会社 | 电动机的节能服务的提供方法及冷冻空调装置 |
| CN100345371C (zh) * | 2004-05-25 | 2007-10-24 | 三菱电机株式会社 | 电车控制装置 |
| CN101507101B (zh) * | 2006-09-26 | 2012-06-27 | 三菱电机株式会社 | 永磁体同步电动机的矢量控制装置 |
| CN101237213B (zh) * | 2007-01-29 | 2010-11-03 | 三菱电机株式会社 | 交流旋转机的控制装置及使用该控制装置的交流旋转机的电常数测定方法 |
| CN101299590B (zh) * | 2007-03-13 | 2011-06-08 | 通用汽车环球科技运作公司 | 脉冲宽度调制逆变器的电流调节器的抗积分饱和控制 |
| CN101841299A (zh) * | 2010-05-25 | 2010-09-22 | 大连理工大学 | 基于map图的电动汽车用驱动电机前馈矢量控制方法 |
| CN101841299B (zh) * | 2010-05-25 | 2011-09-14 | 大连理工大学 | 基于map图的电动汽车用驱动电机前馈矢量控制方法 |
| CN110635739A (zh) * | 2018-06-22 | 2019-12-31 | 大隈株式会社 | 位置控制装置 |
| CN109167548A (zh) * | 2018-09-16 | 2019-01-08 | 湖南沃森电气科技有限公司 | 一种异步电机矢量控制磁场定向矫正方法及其系统 |
| CN111030534A (zh) * | 2019-12-20 | 2020-04-17 | 东南大学 | 一种永磁同步电机稳态运行方式下的参数辨识方法 |
| CN111030534B (zh) * | 2019-12-20 | 2021-07-13 | 东南大学 | 一种永磁同步电机稳态运行方式下的参数辨识方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP3520002B2 (ja) | 2004-04-19 |
| SG97891A1 (en) | 2003-08-20 |
| US6335605B1 (en) | 2002-01-01 |
| KR100364016B1 (ko) | 2002-12-12 |
| CN1175556C (zh) | 2004-11-10 |
| JP2001169599A (ja) | 2001-06-22 |
| KR20010067062A (ko) | 2001-07-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1175556C (zh) | 感应电动机的矢量控制装置 | |
| CN1279688C (zh) | 同步电机的速度控制装置 | |
| EP2043241B1 (en) | Motor Drive Using Flux Adjustment to Control Power Factor | |
| CN1212701C (zh) | 交流电动机的调速装置 | |
| CN1278483C (zh) | 电动机控制装置 | |
| CN1838518A (zh) | 功率逆变器系统和校正功率逆变器系统的电源电压的方法 | |
| CN1533021A (zh) | 交流电动机的控制装置及控制方法 | |
| CN1063382A (zh) | 消除或减少谐波和/或谐振的方法及其装置 | |
| CN1168201C (zh) | 电信系统中的方法及装置 | |
| Rodrigues et al. | Predictive power control for DFIG: A FARE-based weighting matrices approach | |
| CN1685605A (zh) | 与无传感器感应电动机有关的方法 | |
| WO1986001654A1 (en) | System for digitally controlling an induction motor | |
| CN110365230B (zh) | 一种三相电压型pwm整流器直接功率控制装置 | |
| CN111566925B (zh) | 控制多通道多相电机的方法 | |
| CN113437895B (zh) | 一种矩阵矢量角比例谐振控制方法 | |
| JPH09215398A (ja) | インバータの制御装置 | |
| CN1194464C (zh) | 空间矢量调制的感应电动机变结构转矩直接控制方法 | |
| Yang et al. | Loss-minimization control of vector-controlled induction motor drives | |
| JP6437807B2 (ja) | インバータ回路を制御する制御回路、および、当該制御回路を備えたインバータ装置 | |
| WO1998002958A9 (fr) | Procede et appareil de commande d'un moteur a induction | |
| CN110880900A (zh) | 一种用于开关磁阻电机的转矩脉动抑制的方法 | |
| CN213879680U (zh) | 一种交流异步电机飞车启动控制系统 | |
| CN1035297C (zh) | 感应电动机的矢量控制设备 | |
| Utomo et al. | Online adaptive flux control for space vector PWM-DTC IM drives towards optimum efficiency design | |
| CN108988720B (zh) | 一种基于转差自动优化的三相异步电机控制器及控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C06 | Publication | ||
| PB01 | Publication | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CX01 | Expiry of patent term | ||
| CX01 | Expiry of patent term |
Granted publication date: 20041110 |