具体实施形态
以下参考附图对本发明的实施形态进行说明。
本发明的光学式生物信息测量装置,其特征在于,具有对生物进行照明的光源部、接收从所述光源部向所述生物内部传播并从所述生物表面射出的光的受光部、使所述生物表面形成规定形状的成型部、在所述受光部中根据接收的受光量计算出所述生物的生物信息的运算部。
这里,与成型部队生物表面相连接的面最好是平面形状。
又,成型部的与生物表面相连接的面的反射率实质上为0为佳。
又,在成型部的与生物表面相连接的面上最好具有凸出部。
这里,凸出部也可以设置在光源部与受光部之间。在这种情况下,最理想的情况是将凸出部设置在离光源部3~30mm的位置。
又,光源部或/及受光部也可以设置于凸出部。
这里,凸出部最好是具有能够使纵向为3~10mm,横向为3~50mm的生物表面领域发生朝着深度方向凹下2~20mm的变形的形状。
又,光源部或/及受光部也可以是多个。
又,本分明的光学式生物信息测量装置最好是,光源部具备设置在成型部的第1规定位置上的第1光源部和设置在凸出部的第2规定位置上的第2光源部;受光部具备设置在夹住所述凸出部与所述第1规定位置相反一侧的所述成型部的第3规定位置的第1受光部和设置在所述凸出部的第4规定位置的第2受光部。
还有,理想情况的是受光部具有设置在第2规定位置与第4规定位置之间的第5规定位置的第3受光部。
这里,理想的情况是,第1规定位置与凸出部之间的距离在1~20mm之间,所述凸出部与第3规定位置之间的距离在1~20mm之间。又,理想的情况是,第2规定位置与第5规定位置之间的距离在1~20mm之间,所述第2规定位置与第4规定位置之间的距离在20~50mm之间。
又,在第1规定位置与第3规定位置之间的第5规定位置上也可以设置第3受光部。
又,理想的情况是,本分明的光学式皮下脂肪厚度测量装置还具有显示由运算部计算得出的生物信息的显示部、就所述生物信息与外部设备通信的通信部以及输入测量条件的输入部。
本分明中,作为生物信息,可以列举出皮下脂肪、生物体内部的葡萄糖浓度、生物体内部的氧浓度等。这里,在生物信息为生物体内部的葡萄糖浓度的情况下,理想的情况是,从光源部射出的光的中心波长为450nm~1000nm。在生物信息为生物体内部的氧浓度的情况下,理想的情况是,从光源部射出的光的中心波长为1000nm~2000nm。
实施形态1
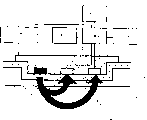
图1是本分明实施形态1的光学式生物信息测量装置的结构图。
在本实施形态的光学式生物信息测量装置中,将光源部11与受光部12设置在使生物表面1平整成型的成型部10上。这里,虽然并非特别限定,但理想的情况是,例如,成型部10的大小为纵向25mm,横向40mm的矩形,成型部的面积在1000mm2以上。但是,成型部10无须一定为矩形。成型部10的材料具有接触生物表面时形状不发生变化那样的强度即可。
成型部10是黑色ABS等材料形成的,该材料与生物表面1相连接的面对由光源部11射出的波长范围的光线的反射率实际上为0。这里所说的实际为0是指反射率在2%以下。而且,作为其他方法,也可以在成型部10上涂布反射率为2%的涂层或者油漆。
将LED光源、激光光源或者灯泡等光源纳入光源部11。由光源部11输出的光的中心波长为500nm~1000nm或者1000nm~2000nm。还有,光源部11也可以是将光源设置成与生物体表面保持距离并用光纤等将光线引导到生物体表面的结构。
受光部12具有光电二极管、雪崩光电二极管、CdS元件等受光传感器。另外,也可以是用光纤等从生物表面1引导光线到受光传感器的结构。
运算部14根据受光部12接收的光13的受光量计算皮下脂肪厚度,显示部15显示由运算部14求得的作为生物信息的皮下脂肪厚度等。又,通信部16就运算部14求得的作为生物信息的皮下脂肪厚度信息、测量开始等的控制数据与外部设备通信。又可以通过输入部17对被检测者的测量部位、性别、年龄、身高、体重等的测量条件进行输入和对测量的开始进行控制。
下面对本实施形态的光学式生物信息测量装置的动作进行说明。
从光源部11射出的光一边由生物内部的皮肤4、皮下脂肪5、肌肉6的散射、吸收一边传播。在生物内部传播的光的中,受光部12接收的光13的受光量,由于皮肤4、皮下脂肪5、肌肉6对光的吸收特性、散射特性不同,受光量随皮下脂肪5的厚度的增厚而增加。皮下脂肪5与受光量的关系如图2所述。预先求出如图2那样的关系曲线并预先储存在运算部14内,在运算部14中,利用由受光部12接收的光13的受光量可以求皮下脂肪的厚度。在运算部14可以根据通过输入部17、通信部16输入的测量条件与皮下脂肪厚度,计算出被检测者的体脂肪率。又可以预先储存多个测量条件。
在此动作中,通过利用成型部10平整生物表面的方法,可以抑止生物表面1的局部形状变化所引起的光的传播变化。此外,由于成型部10具有某一定尺寸以上的面积,接触生物表面1的力分散于其面积,因此也防止在每次测量生物表面时成型部10的接触力的波动而导致生物体变形。通过这些效果能够将生物的形状经常成型为一定形状,因此能够抑止每次测量时生物形状的波动,所以能够提高测量精度。而且,生物表面不一定要形成平面,例如,如图3所示,即使将成型部10的与生物体相连接的部分作成凹面形状,也够经常使测量时的生物体的形状保持一定形状,因此能够进行再现性良好的测量。
又,成型部10的与生物表面1相连接的面的反射率大致为0,以此可以防止从生物表面1向生物体外部射出的光再次射入生物体内部。因此,能够减少受光部12接收的光13在生物内较浅的部分传播而来的那部分光分量,从而提高受光量与皮下脂肪厚度的相关性。
又,通过将以光源部11的波长选择于作为对象的物质的吸收频带、或将受光部12的受光特性选择于作为为对象的物质的吸收频带的方法,也能够根据受光量测量生物内部的氧浓度、生物内部的葡萄糖浓度。在测量生物内部氧浓度的情况下,通过采用具有450nm~800nm的波长、800nm~1000nm的波长的2个波长的光源元件的光源部11,或者采用具有对450nm~800nm波长、800nm~1000nm的波长的区域的2个波长有灵敏度特性的2个以上的受光传感器的受光部12,可以测量与皮下脂肪5同样高精度的生物内部氧浓度。此外,在生物内部葡萄糖浓度的测量方面,通过采用由1000nm~2000nm波长的光源元件组成的光源部11与对1000nm~2000nm波长灵敏的受光传感器所构成的受光部12可以进行高精度测量。
实施形态2
图4是本发明实施形态2的光学式生物信息测量装置的结构图。另外,图5是从上表面观察成型部10的图。在使生物表面1平整成形的成型部10上的光源部11与受光部12之间,具有宽5mm、长50mm、高度5mm的凸起部18。
这里,虽然不是特别限定,但理想的情况是,例如成型部10的大小为长25mm、宽40mm的矩形,成型部10的面积在1000mm2以上。但是,成型部10无需为矩形。另外,凸起部18的长、宽以及高度的尺寸不一定为该值。
成型部10以及凸起部18是黑色ABS等材料形成的,该材料与生物表面1相连接的面对由光源部11射出的波长范围的光线的反射率实际上为0。这里所说的实际为0是指反射率在2%以下。而且,作为其他方法,也可以在成型部10上覆盖反射率为2%以下的涂层或者油漆。
生物表面1由于压着成型部10以及凸起部18而发生变形。但是,由于这里的凸起部18的宽度较窄,因此如图4那样只有生物组织中最柔软的皮下脂肪5中的凸起部18垂直下方的部分发生变形而压着没有凸起部18的部分,且生物内部中只是皮下脂肪5的厚度发生局部变化。
本实施形态的光学式生物信息测量装置的光源部11、受光部12、运算部14、显示部15、通信部16以及输入部17,具有与实施形态1中的光学式生物信息测量装置同样的结构及功能。
如果采用本实施形态的光学式生物信息测量装置,由于利用成型部10使生物表面变1平,与成型部10的生物表面1相连接的面的反射率大致为0,因此能够取得与实施形态1中的光学式生物信息测量装置同样的效果。
而且,在已有例中,为了得到生物内部的更深区域的信息,必须使光源部11与受光部12隔开一定距离,但是,本实施例中,因凸起部18阻碍从生物表面1附近的较浅的部分传播来的光到达受光部12,与没有凸起部18的情况相比,受光部12可以更多地接收从生物内部更深部位传播来的光的成分。因此,与没有凸起部18的情况相比,在受光部12接收的光更能够得到脂肪5的厚度信息。因此,无需将光源部11与受光部12隔开一定距离就可以接收单从生物内部更深部位传播来的光,因此,能够使光学测量系统小型化。此外,通过减少测量对象的生物区域,可以减少局部组织厚度的波动所产生的影响,提高测量精度。即,通过减少光经过的生物内部的区域,提高测量精度。
另外,与实施形态1相同,通过将光源部11的波长选择于作为对象的物质的吸收频带、将受光部12的受光特性选择于作为对象的物质的吸收频带,也能够根据受光量测量生物内部氧浓度以及生物内部葡萄糖浓度。
实施形态3
图6是本发明实施形态3中的光学式生物信息测量装置的结构图。另外,图7是从上表面观察成型部10的图。本实施形态的光学式生物信息测量装置中,在使生物表面平整成形的成型部10上面具有长5mm、宽50mm、高度5mm的凸起部18。
这里,虽然不是特别限定,但理想的情况是,例如成型部10的大小为长25mm、宽40mm的矩形,成型部10的面积在1000mm2以上。但是,成型部10并不一定要为矩形。另外,凸起部18的长、宽以及高度的尺寸不一定为该值。在凸起部18上设置光源部11与受光部12。
生物表面1由于压着成型部10以及凸起部18而发生变形。但是,由于这里的凸起部18的宽度较窄,因此如图6那样只有生物组织中最柔软的皮下脂肪5中的凸起部18垂直下方的部分发生变形而压着没有凸起部18的部分,且只是皮下脂肪5的厚度发生局部变化。
成型部10以及凸起部18是黑色ABS等的材料形成的,该材料与生物表面1相接触的面对由光源部射出的波长范围的光线的反射率实际上为0。这里所说的实际为0是指反射率在2%以下。而且,作为其他方法,也可以在成型部10上覆盖反射率为2%以下的涂层或者油漆。
本实施形态的光学式生物信息测量装置的光源部11、受光部12、运算部14、显示部15、通信部16以及输入部17,具有与实施形态1中的光学式生物信息测量装置同样的结构及功能。
如果采用本实施形态的光学式生物信息测量装置,由于利用成型部10使生物表面1变平、与成型部10的生物表面1相接触的面的反射率大致为0,因此能够取得与实施形态1中的光学式生物信息测量装置同样的效果。
又,由于在凸起部18上设有光源部11与受光部,将光传播的皮下脂肪5的厚度与实际厚度相比较,实际上仅变薄了凸起部18的高度的份额。由于被测的皮下脂肪5的厚度越厚,越是须将光源部11与受光部12隔开一定距离,因此,相反地通过使皮下脂肪5的厚度变薄,可以使光源部11与受光部12的距离靠近。而且,通过在被测的皮下脂肪上近加上凸起部18的高度份额的厚度,可以计算出原来的皮下脂肪厚度。总之,与没有凸起部18的情况相比较,能够使光源部11与受光部12的距离靠近。因此,能够使光学测量系统小型化。并且,通过减少测量对象的生物区域,可以减少局部组织厚度的波动所产生的影响,提高测量精度。
另外,与实施形态1相同,通过将光源部11的波长选择于作为对象的物质的吸收频带、将受光部12的受光特性选择于作为对象的物质的吸收频带,也能够根据受光量测量生物内部氧浓度以及生物内部葡萄糖浓度。
实施形态4
图8是本发明实施形态4中的光学式生物信息测量装置的结构图。另外,图9是从上表面观察成型部10的图。本实施形态的光学式生物信息测量装置中,在使生物表面1平整成形的成型部10上具有长5mm、宽50mm、高度5mm的凸起部18和受光部12。
这里,虽然不是特别限定,但理想的情况是,例如成型部10的大小为长25mm、宽40mm的矩形,成型部10的面积在1000mm2以上。但是,成型部10不一定要为矩形。另外,凸起部18的长、宽以及高度的尺寸不一定为该值。在凸起部18上设置光源部11。
生物表面1由于压着成型部10以及凸起部18而发生变形。但是,由于这里的凸起部18的宽度较窄,因此如图8那样只有皮下脂肪5中的凸起部18垂直下方的部分发生变形而压着没有凸起部18的部分,且只是皮下脂肪5的厚度发生局部变化。
成型部10以及凸起部18是黑色ABS等的材料形成的,该材料与生物表面1相连接的面对由光源部射出的波长范围的光线的反射率实际上为0。这里所说的实际为0是指反射率在2%以下。而且,作为其他方法,也可以在成型部10上覆盖反射率为2%以下的涂层或者油漆。
本实施形态的光学式生物信息测量装置的光源部11、受光部12、运算部14、显示部15、通信部16以及输入部17具有与实施形态1中的光学式生物信息测量装置同样的结构及功能。
如果采用本实施形态的光学式生物信息测量装置,由于利用成型部10使生物表面1变平、与成型部10的生物表面1相接触的面的反射率大致为0,因此能够取得与实施形态1中的光学式生物信息测量装置同样的效果。
又,由于在凸起部18上有光源部11存在,实际上光传播时经过的生物内部的区域仅变深了凸起部18的高度。因此,与没有凸起部18的情况相比,用受光部12可以更多地接收从生物内部更深部位传播来的光的成分。由此,与没有凸起部18的情况相比,在受光部12接收的光更能够得到脂肪5的厚度信息。因此,由于无需将光源部11与受光部12隔开一定距离就可以仅接收从生物内部更深部位传播来的光,因此,能够使光学测量系统小型化。并且,通过减少测量对象的生物区域,可以减少局部组织厚度的波动所产生的影响,提高测量精度。
另外,与实施形态1相同,通过将光源部11的波长选择于作为对象的物质的吸收频带、将受光部12的受光特性选择于作为对象的物质的吸收频带,也能够根据受光量测量生物内部氧浓度以及生物内部葡萄糖浓度。
实施形态5
图10是本发明实施形态5中的光学式生物信息测量装置的结构图。另外,图11是从上表面观察成型部10的图。这里,虽然不是特别限定,但理想的情况是,例如成型部10的大小为长25mm、宽40mm的矩形,成型部10的面积在1000mm2以上。但是,成型部10不一定要为矩形。又,使生物表面1平整成形的成型部10上具有长5mm、宽50mm、高5mm的凸起部18与光源部11。且凸起部18的长、宽以及高的尺寸不一定为该值。此外,在凸起部18上设置受光部12。
生物表面由于压着成型部10以及凸起部18而发生变形。但是,由于这里的凸起部18的宽度较窄,因此如图10那样只有生物组织中最柔软的皮下脂肪5中的凸起部18垂直下方的部分发生变形而压着没有凸起部18的部分,且只是皮下脂肪5的厚度发生局部变化。
成型部10以及凸起部18是黑色ABS等材料形成的,该材料与生物表面1相连接的面对由光源部射出的波长范围的光线的反射率实际上为0。这里所说的实际为0是指反射率在2%以下。而且,作为其他方法,也可以在成型部10上覆盖反射率为2%以下的涂层或者油漆。
本实施形态的光学式生物信息测量装置的光源部11、受光部12、运算部14、显示部15、通信部16以及输入部17,具有与实施形态1中的光学式生物信息测量装置同样的结构及功能。
如果采用本实施形态的光学式生物信息测量装置,由于利用成型部10使生物表面1变平、与成型部10的生物表面1相连接的面的反射率大致为0,因此能够取得与实施形态1中的光学式生物信息测量装置同样的效果。
又,由于在凸起部18上设有受光部12,实际上光进行传播的生物内部的区域仅变深凸起部18的高度。因此,与没有凸起部18时的情况相比较,受光部12可以更多地接收从生物内部更深部位传播来的光的成分。因此,与没有凸起部18时的情况相比较,在受光部12接收的光更能够得到脂肪5的厚度信息。因此,无需将光源部11与受光部12隔开一定距离就可以仅接收从生物内部更深部位传播来的光,因此,能够使光学测量系统小型化。并且,通过减少测量对象的生物区域,可以减少局部组织厚度的波动所产生的影响,提高测量精度。
另外,与实施形态1相同,通过将光源部11的波长选择于作为对象的物质的吸收频带、将受光部12的受光特性选择于作为对象的物质的吸收频带,也能够根据受光量测量生物内部氧浓度以及生物内部葡萄糖浓度。
实施形态6
图12是本发明实施形态5中的光学式生物信息测量装置的成型部10的立体图。
成型部10实质上是平的且在其大致中央设置了凸起部18。成型部10为直径60mm的圆形。凸起部18的大小为长5mm、宽50mm、高5mm。这里,成型部10不一定要为矩形,面积最好在1000mm2以上。此外,凸起部18的长、宽以及高不一定必须为该值。
在除了凸起部18之外的成型部10上且离凸起部18的中心15mm的位置(第1规定位置)上设置第1光源部19,在凸起部18的一端且离凸起部18的中心15mm的位置(第2规定位置)上设置第2光源部20。在与第1光源部19相反的一侧,且离凸起部18的中心距离15mm的位置(第3规定位置)上设置第1受光部21,在与凸起部18上的第2光源相反一侧,且离凸起部18的中心距离15mm的位置(第4规定位置)上设置第2受光部22,在凸起部18的中心(第5规定位置)上设置第3受光部23。这里,各个光源部、受光部不一定必须为该值。
此外,图13以及图14显示本实施形态的光学式生物信息测量装置的结构图。图13是表示使成型部10压到生物表面1时的A-a方向的截面图。
由于生物表面1压着成型部10以及凸起部18而发生变形。而且,由于这里的凸起部18的宽度较窄,因此如图13、14那样只有生物组织中最柔软的皮下脂肪5中的凸起部18垂直下方的部分发生变形而压着没有凸起部18的部分,且只是皮下脂肪5的厚度发生局部变化。
成型部10以及凸起部18是黑色ABS等材料形成的,该材料与生物表面1相连接的面对由第1光源部19以及第2光源部20射出的波长范围的光线的反射率实际上为0。这里所说的实际为0是指反射率在2%以下。而且,作为其他方法,也可以在成型部10上覆盖反射率为2%以下的涂层或者油漆。
将LED光源、激光光源或者灯泡等光源组入第1光源部19以及第2光源部20。由第1光源部19以及第2光源部20输出的光的中心波长为500nm~1000nm或者1000nm~2000nm。此外,在构造上也可以将第1光源部19以及第2光源部20离开生物表面1而设置并用光纤等导向到生物表面1。
第1受光部21、第2受光部22以及第3受光部23具有光电二极管、雪崩光电二极管、CdS元件等的受光传感器。另外,各个受光部也可以是从生物表面1到受光传感器采用光纤等进行导光的结构。
运算部14根据第1受光部21、第2受光部22以及第3受光部23接收到的光的受光量,计算出皮下脂肪厚度,显示部15显示由运算部14求得的作为生物信息的皮下脂肪厚度等。另外,通信部16将运算部14求得的作为生物信息的皮下脂肪厚度信息、测量启动等的控制数据与外部设备进行通信。此外,可以利用输入部17输入检测者的测量部位、性别、年龄、身高、体重等的测量条件以及控制测量启动等。
本实施形态的光学式生物信息测量装置的动作在以下进行说明。
图13中,从第1光源部19射出的光一边被生物内部的皮肤4、皮下脂肪5、肌肉6散射、吸收一边进行传播。通过采用生物内部传播的光中、第3受光部23接收的光24的受光量进行测量,能够得到与实施形态5同样的效果。此外,通过采用生物内部传播的光中、第1受光部21接收的光25的受光量,能够与实施形态2相同地,无需将光源部11与受光部12隔开一定距离就可以仅接收从生物内部更深部位传播来的光,因此,能够使光学测量系统小型化。而且,通过减少测量对象的生物区域,可以减少局部组织厚度的波动所产生的影响,提高测量精度。另外,通过采用设置在凸起部18上的第3受光部23所接收的光,并进行与与已有例同样的修正,可以进行高精度的测量。
图14中,从第2光源部20射出的光边一边被生物内部的皮肤4、皮下脂肪5、肌肉6散射、吸收一边进行传播。在生物内部传播的光中的、第3受光部23接收的光26以及第2受光部22接收的光27的受光量,与实施形态3相同,无需将第2光源部20、第3受光部23以及第2受光部22隔开一定距离就可以近接收从生物内部更深部位传播来的光,因此,能够使光学测量系统小型化。而且,通过减少测量对象的生物区域,可以减少局部组织厚度的波动所产生的影响,提高测量精度。另外,通过采用设置在凸起部18上的第3受光部23所接收的光并进行与与已有例同样的修正,可以进行高精度的测量。
又,通过采用运算部14对同时进行这2个测量所得到的皮下脂肪厚度进行平均化,可以进行精度更高的测量。
另外,与实施形态1相同,通过将第1光源部19以及第2光源部20的波长选择于作为对象的物质的吸收频带、将第1受光部21、第2受光部22以及第3受光部23的受光特性选择于作为对象的物质的吸收频带,也能够根据受光量测量生物内部氧浓度以及生物内部葡萄糖浓度。
本发明的一个实施形态中的光学式皮下脂肪厚度测量方法的特征在于
包含对生物表面施加压力形成规定形状的工序A、
测量所述压力的工序B、
对所述生物照射光的工序C、以及
接收在所述生物内部传播并从所述生物表面射出的光的工序D、
根据在所述工序D中接收的受光量以及在所述工程B中计量的压力,计算出所述生物的皮下脂肪厚度的工序E。这样,通过除去施加于生物表面的压力所产生的皮下脂肪厚度的变化以及皮下脂肪内部的血液量的变化所带来的影响,可以对皮下脂肪厚度进行再现性良好的高精度测量。
本发明的其他实施形态中的光学式皮下脂肪厚度测量方法的特征在于
包含对生物表面施加压力形成规定形状的工序A、
检测出所述压力达到规定值的工序B、
对所述生物照射光的工序C、
当在所述工序B检测到所述压力达到所述规定值时,接收在所述生物内部传播并从所述生物表面射出的光的工序D、以及
根据所述工序D中接收的受光量计算出所述生物皮下脂肪厚度的工序E。虽然皮下脂肪的厚度随着施加于生物表面的压力的增加而减少,但其厚度将稳定在某个值上。当将皮下脂肪厚度稳定时的压力作为规定值时,由于可以通过对生物表面施加规定值以上的压力,能够在皮下脂肪稳定的状态下进行测量,因此,可以再现性良好且高精度地测量皮下脂肪的厚度。
这里,以工序B中的规定值在1kg重以上时,皮下脂肪的厚度稳定为佳。
又,工序C中照射的光的中心波长最好为500nm~1000nm,这是由于皮肤、皮下脂肪、肌肉的各个组织间的吸收以及散射特性的差异大。
本发明的一个实施形态中的光学式皮下脂肪厚度测量装置的特征在于
具有照明生物的光源部、
接收从所述光源部向所述生物内部传播并从所述生物表面射出的光的受光部、
使所述生物表面形成规定形状的成型部、
计量所述成型部施加在所述生物表面的压力的压力计量部、
根据在所述受光部中接收的受光量以及在所述压力计量部中计量的压力,计算出所述生物皮下脂肪厚度的运算部。
这样,通过除去施加于生物表面的压力所产生的皮下脂肪厚度的变化以及皮下脂肪内部的血液量的变化所带来的影响,可以对皮下脂肪厚度进行再现性良好的高精度测量。
本发明的其他实施形态中的光学式皮下脂肪厚度测量方法的特征在于
具有对生物进行照明光源部、
接收从所述光源部向所述生物内部传播并从所述生物表面射出的光的受光部、
使所述生物表面形成规定形状的成型部、
检测所述成型部施加于所述生物表面的压力达到规定值的压力检测部、
根据在述压力检测部检测出所述压力达到所述规定值时的所述受光部中接收的受光量,计算出所述生物的皮下脂肪厚度的运算部。
这样,以皮下脂肪稳定时的压力为规定值,通过对生物表面施加规定值以上的压力,可以在皮下脂肪稳定的状态下进行测量,因此能够对皮下脂肪厚度进行再现性良好的高精度测量。
这里,理想的情况是,成型部的与生物表面相连接的面呈大致平面形状,对作为测量对象部分的生物表面均匀地施加压力。
又,理想的情况是,成型部的与生物表面相连接的面上具有凸起部,在所述凸起部上设置光源部以及受光部。
又,理想的情况是,在光源部上设置多个光源。另外,在受光部上也可以设置多个受光元件。
又,理想的情况是,具有将光源—受光元件之间的距离设置为15mm~30mm即第1距离的光源以及受光元件、与设置为35mm~80mm即第2距离的光源以及受光元件,将与光源的距离是所述第1距离的受光元件中的受光量设为Y1、将与光源的距离是所述第2距离的受光元件中的受光量设为Y2时,在运算部采用Y2/Y1计算出生物的皮下脂肪的厚度。这样,由于能够除去皮肤以及皮下血流的影响,因此可以对皮下脂肪厚度进行再现性良好的高精度测量。
以下,参照附图就有关本发明的光学式皮下脂肪厚度测量方法及其中使用的装置进行详细说明。
实施形态7
图15是本发明实施形态7中的光学式皮下脂肪厚度测量装置的结构图。图16是从将该光学式皮下脂肪厚度测量装置的成型部110与生物表面10连接的一侧观察的俯视图。
在由皮肤105、皮下脂肪106、肌肉107这3层构成的生物表面101上设置使生物表面101形成大致平面形状的成型部110。成型部110呈直径为60mm的圆盘形状,由黑色ABS做成。且成型部110的材质最好是对来自光源的光为低反射率。成型部110采用通过把角磨圆使尖角部分不碰到生物表面的构造。而且,在这里,成型部110也可以采用椭圆形状或者对长40mm、宽60mm左右大小的平板的角进行倒角的形状。
在成型部110内设置由光源111构成的光源部与受光部112。受光部112由计量用受光元件113与修正用受光元件114构成。计量用受光元件113与光源111之间的距离为45mm,修正用受光元件114与光源111的距离为22.5mm。从光源111射出的光的射出口的直径是1.5mm,计量用受光元件113以及修正用受光元件114的光射出口为1.5mm。而且,以计量用受光元件113与光源111之间的距离在35mm~80mm(第2距离)为佳,以修正用受光元件114与光源111之间的距离(第1距离)在15mm~30mm为佳。光源111点灯时,修正用受光元件114中接收修正用受光量(第1距离上的受光量Y1),计量用受光元件113中接收测量用受光量(第2距离上的受光量Y2)。
这里,光源111采用中心波长为785nm的激光二极管作为光源元件。而且,以光源元件是中心波长为500nm~1000nm的激光二极管或者LED等的光源元件为佳。另外,理想的情况是,当在构造上为采用光纤等的导光部件将光从激光二极管导光到生物表面时,光源元件所产生的热将不会传递到生物表面。
受光部112采用光电二极管作为受光元件。而且,受光元件也可以是CdS等的光电转换元件。此外,也可以采用光纤等的导光部件将光从生物表面引导至受光元件。
将计量施加于生物表面101的压力的压力计量部115,与成型部110相连接。
在运算部120中,根据受光部112得到的受光量与压力计量部115得到的压力,计算皮下脂肪106的厚度。将计算出的皮下脂肪106的厚度显示于显示部121,通过通信部122,以数据形式传送到其他设备。
又,也可以通过从输入部123直接或者通过通信部122从其他设备输入身高、体重、年龄、性别、测量部位等的数据,用运算部120计算与皮下脂肪6的厚度相关的身体脂肪率,显示于显示部121或者通过通信部122向其他设备传输数据。
以下对于计量步骤进行说明。第1动作是,在光源111没有点灯的状态下,使成型部110与生物表面101接触。
第2动作是,在受光部112中的受光量在100pW以下、压力计量部115中的计量值因为接触力而为0.1kg重以上(成型部110是直径60mm的圆盘形状,故换算成压力为0.35kPa以上)的情况下,确认受光部112的整体与生物表面相连接且与、成型部110相接触,在这种状态下,当由通信部122或者输入部123输入计量开始的信号时,光源111将点灯。
第3动作是通过测量到达修正用受光元件114的光118,得到修正用受光量(Y1),通过测量到达计量用受光元件113的光119,得到计量用受光量(Y2)。
以下,就有关运算部120中的皮下脂肪的106的厚度的计算方法进行说明。图19中表示在接触力为0.5kg重(由于成型部110呈直径为60mm的圆盘形状,故换算成压力为1.75kPa)以及2.5kg重(由于成型部110呈直径为60mm的圆盘形状,故换算成压力为8.75kPa)情况下的计量用受光量与皮下脂肪106的厚度之间的关系。图19中,黑圆点表示1.75kPa下的计量用受光量与皮下脂肪106厚度之间的关系,白圆点表示在8.75kPa下的计量用受光量与皮下脂肪106的厚度之间的关系。另外,实线是压力为1.75kPa情况下的线性回归直线,虚线是压力为8.75kPa情况下的线性回归直线。
这里,所谓图19中的皮下脂肪厚度,是表示因成型部110接触造成被压穿的情况下的皮下脂肪的厚度。而且,皮下脂肪的厚度不限于表示因与成型部110接触造成被压穿的情况下的皮下脂肪的厚度。皮下脂肪也可以表示未被成型部110没有接触的状态即自然状态下皮下脂肪的厚度。即,如果预先求受光量与自然状态下的皮下脂肪的厚度之间的关系,就能够根据受光量求出自然状态下的皮下脂肪的厚度。还有,在实施形态7以外的其他实施形态中,虽然皮下脂肪厚度表示因成型部110接触造成被压穿的情况下的皮下脂肪的厚度,但是,也可以与实施形态7相同地,通过预先求自然状态下的皮下脂肪的厚度与受光量之间的关系,将自然状态下的皮下脂肪厚度表示为皮下脂肪厚度。因此,虽然在实施形态7以及实施形态7以外的其他实施形态中,皮下脂肪厚度是表示因成型部接触造成被压穿的情况下的皮下脂肪的厚度,但不限于此,也可以表示自然状态下的皮下脂肪厚度。
从附图可以得知,由于施加于生物表面的压力不同,表示计量用受光量与皮下脂肪106的厚度之间的关系的直线发生变化。因此,对于施加于生物表面的压力为不同的多种情况,通过预先求出表示受光量与皮下脂肪厚度关系的多个线性回归直线,从多个线性回归直线中选择与压力计量部115计量的压力值相对应的线性回归直线并采用选择的线性回归直线以及测量的计量用受光量,可以再现性良好地对皮下脂肪厚度进行高精度测量。
然而,主要的误差原因,是计量用受光量中包含皮肤105的散射以及吸收的波动影响。为修正该皮肤105的影响,采用修正用受光量。
将计量用受光量(第2距离中的受光量Y2)被修正用受光量(第1距离中的受光量Y1)除的参数Y2/Y1与皮下脂肪106的厚度的关系表示在图20中。图20中,黑圆点表示在1.75kPa条件下的Y2/Y1与皮下脂肪106厚度的关系,白圆点表示在8.75kPa条件下的Y2/Y1与皮下脂肪106厚度的关系。此外,实线是压力在1.75kPa情况下的线性回归直线,虚线是压力在8.75kPa情况下的线性回归直线。
与图19相比较可以清楚地得知,其波动稳定且具有采用修正用受光量的修正效果。另外,与图19相同,因压力不同,表示Y2/Y1与皮下脂肪106厚度之间关系的直线发生变化。因此,与只采用计量用受光量的情况相同,对于施加于生物表面的压力为不同的多种情况,由于通过预先求出表示Y2/Y1与皮下脂肪厚度的关系的多个线性回归直线,从多个线性回归直线中选择与压力计量部115计量的压力值相对应的线性回归直线并采用选择的线性回归直线以及Y2/Y1,可以修正皮肤105的影响以及施加于生物表面的压力的影响,因此能够进一步再现性良好地对皮下脂肪厚度进行高精度测量。
这里,虽然采用光源部由1个光源111组成、受光部112由计量用受光元件113与修正用受光元件114组成的结构,然而,也可以如图17的结构图以及图18的成型部110的俯视图所述,采用受光部112由1个受光元件、光源部111由计量用由光源元件116与修正用光源元件117组成的结构。这种情况下,在修正用光源元件117点灯且计量用光源元件116熄灯时,使受光部112中接收的光(来自修正用光源元件的光)118的受光量成为修正用受光量(第1距离下的的受光量Y1),修正用光源元件117熄灯且计量用光源元件116点灯时,使受光部112中接收的光(来自计量用光源元件的光)119的受光量成为计量用受光量(第2距离下的受光量Y2)。
实施形态8
图21是本发明实施形态8中的光学式皮下脂肪厚度测量装置的结构图。与图17中所示的实施形态7中的光学式皮下脂肪厚度测量装置不同之处在于,检测成型部110施加于生物表面101上的压力达到规定值以上的压力检测部124替代压力计量部而与成型部110相连接。在其他结构方面,由于与实施形态7中的光学式皮下脂肪厚度测量装置相同,省略说明。
在将成型部10与生物表面接触的状态下,当增加施加于成型部110的压力时,则随着压力增加,皮下脂肪106被压缩变薄,但其厚度稳定在某个值。当将皮下脂肪厚度稳定时的压力作为规定值,则通过对生物表面101施加规定值以上的压力,可以在皮下脂肪106厚度稳定的状态下进行测量。此外,由于皮下脂肪106被压缩变薄,皮下脂肪106内部的血液量波动所产生的波动也将减少。理想的情况是,如果接触力的规定值在2kg重以上(由于成型部110呈直径60mm的圆盘形状,如果换算成压力,在7kPa以上),则皮下脂肪106的厚度将保持稳定。在本实施形态中,将压力的规定值设定在8.75kPa。
以下就测量步骤进行说明。第1动作是,在光源111没有点灯的状态下,使成型部110与生物表面101接触。
第2动作是,确认检测出受光部112中的受光量在100pW以下、压力检测部124中的压力在8.75kPa以上的情况下,受光部112的整体与生物表面相连接且在充分的压力条件下成型部110与生物表面相接触,在这种状态下,当由通信部122或者输入部123输入计量开始的信号时,则修正用光源元件117将点灯。
第3动作是,计量从修正用光源元件117向生物内部传播并到达受光部112的光118的受光量、即修正用受光量(第1距离下的受光量Y1)。
以下,第4动作是,在修正用光源元件117熄灯且计量用光源元件116熄灯的状态下,计量从计量用光源元件116向生物内部传播并到达受光部112的光119的受光量,即计量用受光量(第2距离下的受光量Y2)。
以下就运算部120中的皮下脂肪106的厚度的计算方法进行说明。
图22表示计量用受光量与皮下脂肪106的厚度的关系。图22中,白圆点表示计量用受光量与皮下脂肪106的厚度之间的关系,虚线是该线性回归直线。因此,若采用表示该线性回归直线的关系式与计量出的计量用受光量,则可以求出皮下脂肪的厚度。如果采用该测量方法,由于是在皮下脂肪106的厚度稳定的状态下进行测量,因此可以再现性良好地对皮下脂肪厚度进行高精度测量。
进一步就对皮肤105产生的影响所进行的修正作说明。将计量用受光量(第2距离下的受光量Y2)被修正用受光量(第1距离下的受光量)除的参数Y2/Y1与皮下脂肪106的关系表示在图23中。图23中,白圆点表示Y2/Y1与皮下脂肪106的厚度之间的关系,虚线是其线性回归直线。因此,采用表示该线性回归直线的关系式与计算出的参数Y2/Y1,可以求出皮下脂肪的厚度。如果采用该测量方法,可以对皮肤105产生的影响进行修正,因此可以进一步再现性良好地对皮下脂肪厚度进行高精度测量。
实施形态9
图24是本发明实施形态9中的光学式皮下脂肪测量装置的结构图。图25是从将该光学式皮下脂肪厚度测量装置的成型部110与生物表面10连接的一侧观察的俯视图。省略了与施形态7或者8结构相同部分的说明。在成型部110的大致中心部位设置宽5mm、长52.5mm、高5mm的凸起部125,在其凸起部125上设置光源111与受光部112。
而且,凸起部125以及成型部110的形状,理想的情况是,如图26(a)的俯视图以及图26(b)的侧视图所示,如使凸起部125的角不成为锐角,就能消除接触生物所带来的疼痛感。即,在图26(a)以及图26(b)中,凸起部125带有斜坡以使其角不成为锐角。另外,如图27(a)的俯视图以及图27(b)的侧视图所示,也可以设计成使凸起部125在成型部110上整体呈曲面。
通过使设有成型部110的凸起部125的一面与生物表面101相接触,用成型部110与凸起部125,稳定生物表面101并局部性将其进行挤压,减少凸起部125垂直下方的皮下脂肪106内部的血液量。与只使用成型部110进行挤压的情况相比,由于挤压面积狭小,因此凸起部125垂直下方的皮下脂肪106内部的血液量变得更少,血液量所产生的波动的个体差将进一步减小。
又,受光部112中接收的光内、从生物内部的凸起部125的垂直下方以外的区域传播来的光的成分由于是在与凸起部125垂直下方的区域相比血液量多的区域进行传播,与在凸起部125垂直下方传播来的光的成分相比较,其会发生衰减。因此,在计量的受光量内、从凸起部125垂直下方的皮下脂肪106传播来的光的成分由于其所占比例增加,更加可以局部性地对皮下脂肪进行测量。
以下就计量步骤进行说明。第1动作是,光源111没有点灯的状态下,使成型部110与生物表面101接触。
第2动作是,确认受光部112中的受光量在100pW以下、在压力检测部124中检测到8.75kPa压力以上的情况下,受光部112的整体与生物表面相连接且以及在充分的压力条件下生物表面与成型部110相接触,在这种状态下,当由通信部122或者输入部123输入计量开始的信号,光源111将点灯。
第3动作是,通过计量修正用受光元件114到达的光118,可以得到修正用受光量(第1距离下的受光量Y1),且通过计量达到计量用受光元件113的光119,可以得到计量用受光量(第2距离下的受光量Y2)。
以下就运算部120中的皮下脂肪106厚度的计算方法进行说明。图28表示计量用受光量与皮下脂肪106的厚度的关系。图28中,白圆点表示计量用受光量与皮下脂肪106的厚度之间的关系,虚线是其线性回归直线。因此,采用表示该线性回归直线的关系式与计量完成的计量用受光量,可以求出皮下脂肪的厚度。如果采用该测量方法,由于是在皮下脂肪106的厚度稳定的状态下进行测量,因此可以再现性良好地对皮下脂肪厚度进行高精度测量。
下面进一步对皮肤105的影响的修正进行说明。将计量用受光量(第2距离下的受光量Y2)除以修正用受光量(第1距离下的受光量Y1)的参数Y2/Y1与皮下脂肪106的厚度的关系表示于图29中。图29中,白圆点表示Y2/Y1与皮下脂肪106的厚度之间的关系,虚线是其线性回归直线。因此,若采用表示该线性回归直线的关系式与计算出的参数Y2/Y1,则可以求出皮下脂肪的厚度。如果采用该测量方法,也可以对皮肤105产生的影响进行修正,因此可以进一步再现性良好地对皮下脂肪厚度进行高精度测量。
本发明的一个实施形态中的光学式皮下脂肪厚度测量方法,其特征在于,
具有
对生物表面施加压力的第1工序、
检测出所述压力达到规定值的第2工序、
对所述生物照射光线的第3工序、以及
接收在所述生物体内部传播并从所述生物体表面射出的所述光的第4工序,
还具有根据从检测出所述压力达到所述规定值时开始经过规定的时间之后的时刻在第4工序所接收的受光量,计算出皮下脂肪厚度的第5工序。
虽然皮下脂肪的厚度随着施加于生物表面的压力的增加而减少,但其厚度将稳定在某个值上。如果将皮下脂肪厚度稳定时的压力作为规定值,则通过对生物表面施加规定值以上的压力,能够使皮下脂肪厚度稳定。此外,在施加压力瞬间之后,施加了压力的部位的血液移动到没有施加压力的部位之前,其在血管内流动有阻力,皮下脂肪等的变形处于过渡状态。因此,从施加规定值以上的压力后经过规定的时间的时刻的所述第4工序的受光量计算皮下脂肪厚度,由于皮下脂肪厚度稳定,能够再现性良好地高精度地测定皮下脂肪的厚度。
在这里,第5工序的规定的时间最好是200ms以上。
本发明一实施形态的皮下脂肪的测定方法,其特征在于,
具备
对生物体表面施加压力的第1工序、
检测出所述压力达到规定值的第2工序、
对所述生物照射光线的第3工序、以及
接收从所述生物内部传播并从所述生物体表面射出的所述光的第4工序、
还具有监视在检测出所述压力达到所述规定值时在所述第4工序接收的受光量的变动,根据所述受光量的变动稳定于规定值范围内时的受光量计算出所述生物体的皮下脂肪的厚度的第5工序。
随着施加于生物体表面的压力的增加,皮下脂肪的厚度减小,但是该厚度稳定于某一值。以皮下脂肪的厚度稳定时的压力作为规定值,则通过在生物表面施加规定值以上的压力,能够使皮下脂肪厚度稳定。此外,在施加压力瞬间之后,施加了压力的部位的血液移动到没有施加压力的部位之前,其在血管内流动有阻力,皮下脂肪等的变形处于过渡状态。因此,一直等到受光量稳定在规定值以内之后,根据所述第4工序的受光量计算出皮下脂肪厚度,这时皮下脂肪厚度的稳定,可以再现性良好地对皮下脂肪厚度进行高精度测定。
这里,受光量的变化在±10%以下时,皮下脂肪厚度稳定,因此是理想的。
这里,第2工序中的规定值在7kPa以上时,皮下脂肪厚度稳定,因此是理想的。
又,在第3工序中,照射的光的中心波长为500nm~1000nm时,皮肤、肌肉、脂肪各个组织中吸收以及散射特性有差异,因此是理想的。
本发明的一个实施形态的光学式皮下脂肪厚度测量装置的特征在于,
具有对生物表面施加压力的加压部、
检测所述压力达到规定值的压力检测部、
将光照射于所述生物体的光源部、以及
接收在述生物内部传播并从所述生物表面射出的所述光的受光部,
还具有根据从检测出所述压力达到所述规定值时开始在规定的时间之后的时刻所述受光部所接收的受光量,计算出所述生物体的皮下脂肪厚度的运算部。
虽然皮下脂肪的厚度随着施加于生物表面的压力的增加而减少,但其厚度将稳定在某个值上。如果将皮下脂肪厚度稳定时的压力作为规定值,则通过对生物表面施加规定值以上的压力,能够使皮下脂肪稳定。此外,在施加压力瞬间之后,施加了压力的部位的血液移动到没有施加压力的部位之前,其在血管内的流动遇到阻力,皮下脂肪的变形处于过渡状态。因此,根据在施加规定值以上压力之后经过规定时间的时刻的所述受光部的受光量,可以计算出皮下脂肪厚度,这时皮下脂肪厚度稳定,可以再现性良好地对皮下脂肪厚度进行高精度测定。
又,本发明的一个实施形态中的光学式皮下脂肪厚度测量装置的特征在于,
具有
对生物体表面施加压力的加压部、
检测出所述压力达到所述规定值的压力检测部、
将光照射于所述生物的光源部、以及
接收在述生物内部传播并从所述生物表面射出的所述光的受光部,
还具有在检测出所述压力达到所述规定值时,监视在所述受光部接收的受光量的变化,并根据所述受光量的变化稳定在规定值范围内时的受光量,计算出所述皮下脂肪厚度的运算部。
虽然皮下脂肪的厚度随着施加于生物表面的压力的增加而减少,但其厚度将稳定在某个值上。如果将皮下脂肪厚度稳定时的压力作为规定值,则通过对生物表面施加规定值以上的压力,能够使皮下脂肪稳定。此外,在施加压力瞬间之后,施加了压力的部位的血液移动到没有施加压力的部位之前,其在血管内的流动遇到阻力,皮下脂肪的变形处于过渡状态。因此,一直等到受光量稳定在规定值以内之后,根据所述受光部的受光量计算出皮下脂肪厚度,皮下脂肪厚度的稳定,可以再现性良好地对皮下脂肪厚度进行高精度测定。
这里,理想的情况是,如果加压部的与生物表面连接的面为大致平面形状,则可以对作为测量对象部分的生物体表面均衡地施加压力。
又,最好是在光源部设置多个光源。又可以在受光部设置多个受光元件。
又,最好是,具有将光源—受光元件之间的距离设置为15mm~30mm、即第1距离的光源以及受光元件、与设置为35mm~80mm、即第2距离的光源以及受光元件,将具有所述第1距离的受光元件中的受光量记为Y1,将具有所述第2距离的受光元件中的受光量记为Y2时,在运算部用Y2与Y1之比计算出生物体皮下脂肪的厚度。这样,由于也能够消除皮肤的颜色等影响,因此可以对皮下脂肪厚度进行更为再现性良好的高精度测定。
以下利用附图就本发明的光学式皮下脂肪厚度测量方法以及使用于该方法的装置进行详细说明。
实施形态10
图30是本实施形态10中的光学式皮下脂肪厚度测量装置的结构图,图31是该光学式皮下脂肪测量装置的加压部、即成型部210从其与生物表面201相连接的一侧观察的俯视图。
在皮肤205、皮下脂肪206、肌肉207三层组成的生物体表面201上设置使生物体表面201成形为大致平面形状的成型部210。成型部210呈直径60mm的圆盘形状,采用黑色ABS材料做成。而且,成型部210的材质最好是对来自光源部211的光具有低反射率的材料。成型部210采用通过把角磨圆使生物表面不碰到锐角部分的构造。而且,这里成型部210也可以采用椭圆形或者具有长40mm、宽60mm左右大小的平板倒角后的形状。
在成型部210内设置光源部211与受光部212。受光部212由计量用受光元件213(第2受光元件)与修正用受光元件214(第1受光元件)组成。计量用受光元件213与光源部211之间的距离为45mm,修正用受光元件214与光源部211之间的距离为22.5mm。从光源部211射出的光的出射口的直径为Φ1.5mm,计量用受光元件213以及修正用受光元件214的光的入射口的直径为Φ1.5mm。而且,以计量用受光元件213与光源部211之间的距离最好是在35mm~80mm(第2距离)的范围内,修正用受光元件214与光源部211之间的距离(第1距离)最好是在15mm~30mm范围内。光源部211点灯时,在修正用受光元件214接收修正用受光量(Y1),在计量用受光元件213接收计量用受光量(Y2)。
这里,虽然光源部采用一个光源211,受光部212采用由计量用受光元件213与修正用受光元件214组成的结构,但并非仅限于此,也可以是图32的结构图以及图33的成型部210所示的结构。即如图32的结构图以及图33的成型部210a的俯视图所示,也可以是受光部212a采用一个受光元件,光源部211a采用由计量用光源元件216与修正用光源元件217组成的结构。在这种情况下,修正用光源元件217点亮,计量用光源元件216熄灯时,使受光部212a中接收的光218的受光量成为修正用受光量(在第1距离的受光量Y1),修正用光源元件217熄灭,计量用光源元件216点亮时,受光部212中接收的光219的受光量成为计量用受光量(在第2距离的受光量Y2)。
这里,光源部211采用中心波长785nm的激光二极管作为光源元件。而且,光源元件中以中心波长在500nm~1000nm范围内的激光二极管或者LED等光源元件为佳。而且,最好是采用光纤等导光零件将光从光源元件引导至生物体表面的结构,这样,由于光源元件中产生的热将不会传递到生物体表面。而且,对于图32及图33所说明的光源部211a,可以说也有与上面所述相同的情况。
受光部212采用光电二极管作为受光元件。而且,受光元件也可以是CdS等的光电变换元件。也可以采用光纤等导光零件将光从生物体表面引导至受光元件。而且,对于图32和图33所说明的受光部212a,可以说也有与上面所述相同的情况。
图30中,检测成型部210施加于生物表面201的压力达到某一规定值的压力检测部215与成型部210相连接。在使成型部210压在生物体表面的状态下,一旦增加施加于成型部210的压力,随着压力增加,皮下脂肪206被压缩变薄,但其厚度稳定在某个值。如果将皮下脂肪厚度稳定时的压力作为规定值,通过对生物体表面201施加规定值以上的压力,可以在皮下脂肪206厚度稳定的状态下进行测量。由于皮下脂肪206被压缩变薄,皮下脂肪206内部的血液量波动所产生的个体差也将减少。
图34表示使与成型部210相同形状的板按压在不同的3个生物体上时的接触力与皮下脂肪厚度的关系图。根据图34,接触力的规定值在2kg以上,则皮下脂肪206的厚度将变得稳定,因此是理想的。这里,由于成型部210的面积是28.26cm2,因此在本实施形态中,将压力规定值设定在7kPa。
因此,只要对生物表面施加规定值以上的压力,即使压力有些波动,皮下脂肪206的厚度将处于稳定的状态。因此,即使没有采用为使成型部21按压在生物体表面201的特别装置,只要用人体的手等采以规定值以上的压力使成型部210按压生物表面201,就能够简单且精度良好地对皮下脂肪厚度进行计量。
运算部220中,根据从压力检测部215检测出规定值以上的压力的时刻开始经过规定的时间之后在受光部212得到的受光量,计算出皮下脂肪206的厚度。这是因为在压力达到规定值的瞬间生物组织内的血液的流动在血管等中遇到阻力,血液等移动过程中的皮下脂肪的厚度在产生变化导致受光量不稳定,根据其变化停止的规定时间后的受光量计算出皮下脂肪厚度。这里,将规定时间选择在200ms以上。将运算部220计算出的皮下脂肪206的厚度显示在显示部221,通过通信部222作为数据输送到其他设备。
又,采用由输入部223直接输入身高、体重、年龄、性别、测量部位等数据或者通过通信部222由其他设备输入这些数据的方法,用运算部220计算与皮下脂肪206的厚度具有相关性的身体脂肪率,并且可以在显示部221上显示,或通过通信部222向其他设备传送数据。
以下就计量步骤进行说明。第1动作是,在光源211没有点亮的状态下,使成型部210按压在生物表面201上。
第2动作是,确认受光部212中的受光量在100pW以下,压力计量部215中的计量值在7kPa以上的情况下,受光部212整体与生物表面相连接且在规定值以上的压力下使生物表面与成型部210相接触,在这种的状态下,一旦由通信部222或者输入部123输入计量开始的信号,光源211就点亮。
第3动作是,通过测定200ms后到达修正用受光元件214的光,得到修正用受光量(在第1距离上的受光量Y1),通过测量到达计量用受光元件213的光,得到计量用受光量(在第2距离上的受光量Y2)。
还有,上述说明中假定第1、第2、第3动作按照这一动作顺序进行,但是第1、第2、第3动作的顺序也可以是任意顺序。又,在说明第1动作时,是假定光源1不点亮进行说明的,但也可以预先使光源点亮进行第1动作。
以下就用运算部220计算皮下脂肪206的厚度的计算方法进行说明。图35是一例计量用受光量与皮下脂肪206的厚度之间的关系图。通过预先求出表示计量用受光量与皮下脂肪厚度之间关系的多条线性回归直线(regression line),采用线性回归直线与计量用受光量,可以抑制施加于生物表面的压力的波动以及生物内部的血液量的波动,再现性良好地对皮下脂肪的厚度进行高精度测量。这里,将在没有进行压力控制情况下的计量用受光量与皮下脂肪厚度之间的关系的一例示于图36。图36中波动大,其相关性与控制压力的情况下的图35相比相关性差。
然而,计量用受光量Y2包含作为主要误差原因的皮肤205的颜色等影响。为修正该皮肤205的颜色等,采用修正用受光量Y1。
将计量用受光量(第2距离上的受光量Y2)除以修正用受光量(第1距离上的受光量Y1)的参数Y2/Y1与皮下脂肪206厚度的关系示于图37。
与图35相比,可以清楚地看出,其波动稳定下来且具有采用修正用受光量修正的效果。因此,与只采用计量用受光量的情况相同,可以通过预先求出表示Y2/Y1与皮下脂肪厚度的关系的线性回归直线,并采用线性回归直线以及Y2/Y1,进一步修正皮肤105的影响,因此能够再现性良好地对皮下脂肪厚度进行更高精度的测定。
实施形态11
本发明的实施形态11中的光学式皮下脂肪厚度测量装置的结构图与图30以及图31相同。与实施形态10中的光学式皮下脂肪厚度测量装置的不同之处在于,压力检测部检测出压力之后,运算部一直等到计量用受光量以及修正用受光量的变化稳定在规定值以内之后,才根据出计量用受光量以及修正用受光量计算出皮下脂肪厚度。
其他结构由于与实施形态10中的光学式皮下脂肪厚度测量装置相同,故省略其说明。
以下就计量测量步骤进行说明。第1动作是,在光源211没有点亮的状态下,使成型部210按压在生物表面201上。
第2动作是,确认受光部212的受光量在100pW以下,在压力检测部224检测出7kPa以上压力的情况下,受光部212整体与生物表面相连接并且在充分的压力条件下生物表面与成型部210相接触,在这种状态下,一旦由通信部222或者输入部223输入计量开始信号,修正用光源217将点亮。
第3动作是,计量从修正用光源元件217向生物内部传播并到达受光部212的光218的受光量、即修正用受光量(第1距离上的受光量Y1)。
还有,虽然假定依照第1、第2、第3动作的顺序工作进行说明,但是并不限于此,也可以以任意时序工作。又假定第1动作时光源211不点亮进行说明,但也可以预先使光源211点亮再进行第1动作。
用运算部220监视修正用受光量,并求1秒钟的修正用受光量的变化在±10%以内时的修正用受光量的平均值。
接着,作为第4动作,在修正用光源元件217熄灯,且计量用光源元件216点亮的状态下,计量从计量用光源元件216向生物内部传播达到受光部212的光219的受光量、即计量用受光量(第2距离上的受光量Y2)。用运算部220监视计量用受光量,并求1秒内的计量用受光量的变化在±10%以内时的计量用受光量的平均值。这里,求1秒钟的受光量的平均值的理由是,由于受光量也受到在生物内部流动的血液的脉流的影响,人的脉搏跳动节奏大约在1秒钟1次以上,因此通过取1秒钟以上的平均值,可以取得不受脉流影响的数据。
以下就运算部220中的皮下脂肪206的厚度的计算方法进行说明。图35是一例计量用受光量的平均值与皮下脂肪厚度之间的关系图。图35中,白圆点表示计量用受光量与皮下脂肪206的实测值之间的关系,实线是其线性回归直线。因此,如果采用表示该线性回归直线的关系式与测出的计量用受光量的平均值,可以求出皮下脂肪的厚度。如果采用该测量方法,由于是在皮下脂肪206的厚度稳定的状态下进行测量,因此可以再现性良好地对皮下脂肪厚度进行高精度测量。
还有,下面就有关皮肤205的颜色等的影响的修正进行说明。将计量用受光量(第2距离上的受光量Y2)的平均值除以修正用受光量(第1距离上的受光量Y1)的参数Y2/Y1与皮下脂肪206厚度的关系示于图37。图37中,白圆点表示Y2/Y1与皮下脂肪206厚度之间的关系,实线是其线性回归直线。因此,采用表示该线性回归直线的关系式与计算出的参数Y2/Y1,就可以求出皮下脂肪的厚度。由于采用该测量方法可以修正因皮肤205的颜色等产生的影响,因此能够以更加良好的再现性对皮下脂肪厚度进行高精度测量。