CN1214809A - 双凸极永磁电机 - Google Patents
双凸极永磁电机 Download PDFInfo
- Publication number
- CN1214809A CN1214809A CN96193837A CN96193837A CN1214809A CN 1214809 A CN1214809 A CN 1214809A CN 96193837 A CN96193837 A CN 96193837A CN 96193837 A CN96193837 A CN 96193837A CN 1214809 A CN1214809 A CN 1214809A
- Authority
- CN
- China
- Prior art keywords
- mentioned
- stator
- permanent magnet
- rotor
- stators
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K16/00—Machines with more than one rotor or stator
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/18—Structural association of electric generators with mechanical driving motors, e.g. with turbines
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/24—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets axially facing the armatures, e.g. hub-type cycle dynamos
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/14—Stator cores with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/70—Wind energy
- Y02E10/72—Wind turbines with rotation axis in wind direction
Abstract
一种双凸极永磁电机,它包括插置在一对横向配置的定子(100、104)之间的环形转子(102)。转子(102)包括许多永磁体(106),该永磁体与钢制的电磁凸极(108)交替配置。每个定子(100、104)均具有许多均匀间隔开的纵向凸极(110、112)并支承许多串联的铜线圈(126、128)。分为两组的铜线圈构成A相绕组和B相绕组。
Description
发明背景
发明领域
本发明涉及低速发电机,具体涉及用于风轮机直接驱动的发电机。
相关技术描述
近年来风轮机作为对环境安全的而且相当廉价的替代能源已受到广泛注意。随着这种兴趣的增长,已进行了显著的努力来开发可靠且高效率的风轮机。
风轮机一般包括具有多个叶片的转子。该转子水平装在一个机座内,该机座位于桁梁或单管塔的顶部。风轮机的叶片将风能转换为驱动一个或多个发电机的转动力,该发电机通过齿轮装置可转动地连接于该转子。为了使发电机有效地将机械能转换为电能,必须用齿轮装置提升风轮机转子固有的低转速,产生的电能被馈送到公用电网上。
很多常规风轮机以恒定速度转动产生每秒60周(60Hz)的电能,该频率是美国交流电的标准。因为风速连续变化,所以这些风轮机必须具有保持转子速度恒定的系统。在一种这样的系统中,当风速增加时将叶片的叶距增加,而在风速减小时将叶片的叶距减小,由此使转子转速保持恒定。
有些风轮机通过采用电力换流器调节其输出而变速工作。当风轮机转子的速度波动时,从发电机输出的交流电流的频率也发生改变。配置在发电机和公用电网之间的电力换流器将频率变化的交流电流转化为直流,然后再将直流转换成具有固定频率60Hz的交流电流。
风轮机必须结实和可靠。因为风轮机的齿轮装置价格贵、重量大、又要经常维修,所以很希望通过使发电机直接连接于风轮机转子而除去齿轮装置。风轮机直接驱动的优点是提高了可靠性、降低了成本、减小了重量、减小了工作噪声、提高了效率而且没有转矩限制。
然而,因为常规发电机不能在30~50r/min范围内的低转速下有效工作,所以将风轮机直接连接到发电机上也是有问题的。Weh H.,May H.和Salaby M.在Proc.ICEM,1990年第3卷1040~1045页的题为“永磁激励同步电机的高效磁路”“(Highly Effective MagneticCircuits for Permanent Magnet Excited Synchronous Machines)的论文中公开了一种可用作低转子转速发电机的电机。
图1所示的这种横向磁通电机(TF电机)包括环形转子2(图中仅示出其一部分)、固定的外侧电枢绕组4、固定的内侧电枢绕组6、多个外侧定子铁心磁通导向件8和多个内侧定子铁心磁通导向件10。环形转子2包括第一列永磁体12和第二列永磁体14。用非磁性材料例如纤维增强树脂做的环形件16被夹在两列永磁体之间。环形转子2构造成永磁体12和铁部件18交替布置,永磁体14与铁部件20交替布置。
即使TF电机可以在低转子转速下工作,但它也具有若干显著的缺点。具体是,TF电机可能有相当大的槽口漏磁,这对操作性能有负面影响。为弄清此问题的本质,考虑P≡Γω这一关系,式中
P=电机的额定功率
Γ=转矩
ω=转子角速度从上述关系中可以明显看出,为在低的角速度(ω)下达到高的额定功率(P),必须尽量增大由电机产生的转矩(Γ)。众所周知,在这种技术中为获得高的转矩,必须尽量增加电机的磁通量和电枢绕组4和6中的电流。为了承载绕组4和6中增加的电流而又不会因发热造成能量过分损失,必须增加电枢绕组4和6的横截面积。
另外,众所周知,在这种技术中由电机产生的转矩正比于电机直径的平方(或立方或大于1的幂数)与电机长度之乘积。换言之:
Γ=kd2L式中,Γ=转矩
k=常数
L=电机的有效材料长度
d=电机的有效材料直径
上述关系表示,为在紧凑装置中获得高的转矩,最佳技术方案是增加电机直径而不是电机长度。在图1所示的先有技术系统中,如果要增加TF电机的直径并保持长度不变,则只有增加分别包含电枢绕组4和6的定子铁心磁通导向件8和10的槽口深度D,以便尽可能增大电枢绕组4和6的横截面积(因为深度D是电机直径的函数),而定子铁心磁通导向件8和10的槽口宽度W(该宽度是机器长度的函数)必须保持不变。
图2示出,当槽口深度D增加时,槽口空气隙的横截面积Aa以及穿过例如钢制外部定子铁心磁通导向件8的磁路长度Ls也增加。而外部定子铁心磁通导向件8的横截面积As和穿过槽口空气隙的磁路长度La保持不变。因为磁阻R(磁路对磁通量形成的阻力)等于L/μA,式中
μ=介质的导磁率
L=磁路长度
A=介质的横截面积所以从图2可以明显看出,当槽口深度D增加时,通过钢制外部定子铁心磁通导向件8的磁阻增加,而通过槽口空气间隙的磁阻减小。因此增加槽口深度D导致漏磁的增大,因而磁链沿路径La穿过槽口空气间隙而不是沿着穿过外部定子铁心磁通导向件8中的路径Ls。任何沿路径La而不是沿路径Ls经槽口空隙漏出的磁力线没有链接位于槽口空气间隙中的绕组的所有线圈(例如图1的绕组4),因而不能产生电机的额定转矩,造成电机的额定功率减小。
TF电机的另一缺点是,由于两个定子(即外部定子铁心磁通导向件8和内部定子铁心磁通导向件10)的非对称配置,由外部电枢绕组4和内部电枢绕组6(图1)形成的磁阻是不同的,造成两相之间的电磁不平衡。由图3可以看到TF电机电磁不平衡的原因。由外部定子铁心磁通导向件8与空气间隙23交替配置所形成的外部体积22大于由内部定子铁心磁通导向件10与空气间隙25交替配置所形成的内部体积24。因为体积22和24内均包括相同数目的相同的钢制定子铁心磁通导向件,而且外部体积22事实上大于内部体积24,所以在外部体积22中的钢与空气之比小于在内部体积24的。因此外部体积22与内部体积24相比,对磁通具有更大的磁阻,这造成外部电枢绕组4和内部电枢绕组6(图3中未示出)的两相之间的磁不平衡。TF电机两相之间的磁的不平衡导致产生热损耗的循环电流、可能损坏转子轴承的轴承电流和转子的不均匀负载,这些造成电机的机械设计和电气设计中的困难。
另外,已证明制造大型TF机(很希望制造这种大型机,因为磁极数目且由此电机尺寸的增加将改进它在低转子转速下的操作特性)是一项艰巨的任务,因为当这些部件的尺寸增大时,在环形转子2和外部与内部定子铁心磁通导向件8和10之间要保持小的如图4所示的空气间隙26和28是相当困难的。(众所周知,在这种技术中为获得最大功率和效率,必须尽量减小电机的活动部件和固定部件之间的空气间隙。)另外,TF电机不适合于高速操作,因为固定的外部定子铁心磁通导向件8和环形转子2的同心取向使得:当转子转速增加时,环形转子2的径向膨胀将逐渐减少空气间隙26,直到环形转子2碰撞到外部定子铁心磁通导向件8,这将造成TF电机的灾难性破坏。
另外,TF电机成本相当高,因为制造包括外部、内部定子铁心磁通导向件8、10及电枢绕组4、6的复杂固定组件是相当困难的。TF电机在其绕组中用了大量铜,这又增加了制造成本。在绕组中铜的利用率不高,因为仅在电枢绕组4和6的厚度为T(图4)的部分被用于形成转矩(因为绕组中仅有这些部分由磁力线链接)。厚度为G(G>T)的其余部分绕组的作用只是用以闭合电路。
TF电极的另一缺点是,由于不存在通到内部的出入口,所以在机器操作期间在内部定子铁心磁通导向件10中产生的热量很难散发出去,这样便降低了效率和功率输出。
发明概述
因此要求提供一种双凸极永磁电极,该电机可以克服上述缺点,例如,可以尽量减小槽口磁漏、具有电磁平衡的绕组相、制造容易且成本低、可以在低速和高速下运转、有利于散热并具有紧凑和高效的结构。
还希望永磁电机在低角速度下获得高的功率密度、能够容纳数目多的磁极、可采用具有低电感系数绕线的常规绕组设计以及具有简单的支承结构。
研究以下的说明和附图可以明显看出本发明的其它优点。
在一个实施例中,本发明的双凸极轴向磁通永磁电极包括转子,该转子装在一对共轴且横向取向的定子之间。该转子用许多与钢制电磁凸极交替配置的永磁体制成。各个定子具有许多纵向取向的凸极。定子凸极支承两组多个铜线圈,其中在各个定子凸极上绕一个单一线圈。每组多个线圈串联,因此构成两相绕组。
附图简述
参考附图借助于不带有限定性的实施例例示出本发明,其中:
图1是先有技术的横向磁通电机(TF电机)的透视图;
图2是图1先有技术TF电机的定子铁心磁通导向件的透视图;
图3是图1先有技术TF电机的侧视图;
图4是图3先有技术TF电机的细节图;
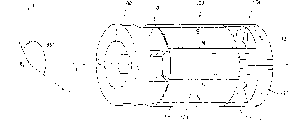
图5是按照本发明构造的双凸极轴向磁通永磁电机(DSAFPM电机)之主要部件的分解透视图;
图6是图5所示DSAFPM电机转子的侧视示意图;
图7是透视图,示出图5所示定子的制造方法;
图8是按本发明构造的DSAFPM电机的部分截面透视图;
图9是图8所示DSAFPM电机线圈的透视图;
图10是具有不同长度端部绕组的图8线圈的透视图;
图11是示意图,示出适用于将图8所示DSAFPM电机连接于公用电网的换流器配置,其中DSAFPM电机连接于风轮机转子上;
图12是图11换流器配置的细节示意图;
图13是图8所示DSAFPM电机的等效电路;
图14是图表,示出图8所示的DSAFPM电机在正常速度下转矩的产生;
图15是图表,示出图8所示DSAFPM电机在高速度下转矩的产生;
图16是图8 DSAFPM电机的横截面图;
图17~24示出图8所示DSAFPM电机磁通分布的变化;
图25和26是对应于图17~24所示DSAFPM电机磁通分布变化的磁链曲线;
图27是双凸极轴向磁通永磁电机的示意图,其中各个定子包括A相和B相绕组的线圈;
图28是具有双转子结构的双凸极轴向磁通永磁电机的横截面图;
图29和30是示意图,示出图28所示电机的不同转子取向;
图31是本发明的双凸极径向磁通永磁电机的横截面图。
为了例示目的,这些图不一定按比例画出。在所有图中,相同部件用相同编号表示。
发明详述
在以下的整个说明中,为更好地理解本发明,示出了一些具体的细节。但是可以不用这些具体细节而实施本发明。在另外一些情况下,为避免不必要地混淆本发明而没有示出或说明公知的部件。因此说明和附图只是例示性质而没有限制性的意义。
图5示出本发明的双凸极轴向磁通永磁电机的主要部件。该电机包括第一定子100、转子102和第二定子104,它们均为环形。定子100和104具有外径d,它与转子102的外径相同。
转子102包括许多纵向的永磁体106,例如稀土永磁体或铁氧体永磁体。永磁体106围绕转子102均匀间隔开并且与许多用导磁材料例如叠层钢制造的电磁转子凸极108交替配置,凸极数目与永磁体106相同。各个永磁体106具有径向尺寸t和角度θm。永磁体106在横向方向上被极化,使得转子凸极108在转子的两侧被完全一样地极化,如图6所示,该图示出磁力线107的取向。
定子100(图5)具有许多纵向定子凸极110和一个铁座(backiron)111。定子104具有许多纵向定子凸极112和一个铁座113。定子凸极110和112围绕其相应定子100和104均匀间隔开。各个定子具有许多定子凸极,其数目等于转子凸极108的数目。每个定子凸极具有径向尺寸t和角度θs。
定子100和104分别包括许多独立的叠置钢片,这些定子采用卷绕和冲压叠层钢带的方法被廉价地制造,如图7所示。
图8是本发明的双凸极轴向磁通永磁电机的透视横截面图。电机的转子102刚性连接于主轴114,该主轴又直接连接在风轮机的转子(未示出)上。主轴114被支承在圆筒机壳116内,该机壳具有端面118和120。该轴114在轴承122和124中转动,该轴承分别居中地安装在端面118和120上。
定子100的铁座111刚性地固定于端面118的内侧表面上,而定子104的铁座113则刚性地固定于端面120的内侧表面上。定子100和104的这种配置使得在定子中由涡流和线圈电流产生的热量可以有效地经机壳116传导和对流散发到周围大气中。
定子100和104如此取向,使得当定子凸极112与永磁体106完全对准时,定子凸极110完全与转子凸极108对准,反之亦然。定子凸极110支承铜线圈126,而定子凸极112支承铜线圈128,其中各个线圈围绕各个定子凸极的周缘配置。线圈126和128具有常规形状和设计,因此可以廉价且容易地制造,并且安装在由定子凸极110和112形成的槽口中。
如图9所示,线圈128包括端部绕组部分E和导体部分C。端部绕组部分E的长度(不参与产生转矩)小于导体部分C的长度。线圈126和128的这种构形减少了线圈的电感系数(电感系数是电路的一种特性,电路中的变化电流通过电感系数产生变化的磁场,该变化的磁场又在同一电路或邻近的电路上产生感应电压),这对于换流器馈电电机是有利的,在这种电机中,电流由施加在电机端子上的脉宽调制电压控制。产生这种优点是由于低电感绕组可以快速动态控制电流,因为电流可以紧随着所施加的或产生的电压而没有显著的相滞后。另外,因为端部绕组部分E较小,所以绕组中铜可以得到有效应用,并且进一步降低了电机成本。线圈126和128还可以具有图10所示的构形,其中端部绕组E1和E2具有不同长度。
如图11所示,线圈126串联,构成A相绕组133。线圈128也串联,构成B相绕组135。A相和B相绕组133和135连接于功率电子换流器129,该换流器包括例如在William L.Erdman的美国专利No.5225712中说明的三相直流 交流换流器134以及双极两相换流器136,该换流器136控制通过各相绕组沿两个方向的电流值。当风轮机转子235转动刚性连接于其上的轴114时便产生电流。换流器134电连接于公用电网137上,而换流器136则电连接到A相和B相绕组133和135上。换流器134和136由直流线路138相互连接。换流器129通过脉宽调制电压波形调制相电流。另外,换流器129还允许将电机用作电动机或用作发电机,并且还允许电机在保持恒电压恒频率连接于公用电网的同时进行电机的变电压变频操作。
图12是换流器136的示意图,它包括许多开关137,例如隔离栅双极晶体管(IGBT)、许多单向二极管139和例如电池的电源140。
可以应用双凸极轴向磁通永磁电机的基于有限元模型(FEM)分析提出的线性模型来研究电机的操作性能及其可能的控制方法。这种线型模型的假定如下:(1)电感对转子转角的变化是线性的;(2)电感系数与电流量无关。示于图13的双凸极轴向磁通永磁电机线性模型的等值电路推导如下: 式中
ua=相A的端电压;
ub=相B的端电压;
ia=相A的相电流;
ib=相B的相电流;
ra=相A的电阻;
rb=相B的电阻;
λa=相A的电枢感应磁链;
λb=相B的电枢感应磁链;另外 式中,Ψma=由相A链接的永磁体磁通量
Ψmb=由相B链接的永磁体磁通量而且:
λa=Laa×ia+Mba×ib
λb=Mab×ia+Lbb×ib式中
Mab=相A和相B之间的互感系数(由相B链接的磁通量除以相A的激励电流);
Mba=相A和相B之间的互感系数(由相A链接的磁通量除以相B的激励电流)。由以上可得到: 式中qr=转子转动的机械角度
wr=转子角速度
这组方程示意于图13,其中采用以下定义:
ema=由永磁体磁通量变化产生的相A的感应电压;
emb=由永磁体磁通量变化产生的相B的感应电压;
era=由相A自感系数变化产生的相A的磁阻电压;
erb=由相B自感系数变化产生的相B的磁阻电压;
erma=由相A和相B之间互感系数的变化产生的相A的磁阻电压;
ermb=由相A和相B之间互感系数的变化产生的相B的磁阻电压;
Laa=相A的自感系数;
Lbb=相B的自感系数;
Mab=相A和相B之间的互感系数。
转矩由下式给出:
ema×ia+emb×ib=ωτ(Tma+Tmb)式中 由相A产生的机械转矩 由相B产生的机械转矩。
在正常操作条件下,相A和相B的自磁阻转矩将彼此抵消,如图14所示。互磁阻转矩为零平均值。磁阻转矩峰值较小,因为由于双凸极轴向磁通永磁电机具有的双空气间隙结构导致互感系数的变化相当小。所以产生的转矩很平滑。
当电机的操作速度高于额定值时,可以用自磁阻转矩借助于图15所示的控制方法来补偿由于不规则电流波形引起的功率损失。因此,双凸极轴向磁通永磁电机的操作速度能够高于已知的永磁电机。在高速时,互磁阻仍导致零平均转矩。
如果按下式定义λa和λb则可得到双凸极轴向磁通永磁电机的非线性模型:
λa=f(θr,ia,ib)
λb=f(θr,ia,ib)
因为定子100和104以同样方式成形,所以由相A绕组和相B绕组得到的磁阻是相等的,因而在两相之间形成电磁平衡。两相之电磁平衡的有利之处在于在理论上可以消除循环电流、轴承电流和转子上的不均匀负载,因此增加了电机的效率和可靠性。
如图16所示,在转子102和定子100的凸极110(其轮廓用虚线表示)之间存在空气间隙130。在转子102和定子凸极112之间也同样存在空气间隙132,其宽度与空气间隙130的宽度相等。众所周知,尽量减小电机转子和定子之间的空气间隙可以增加功率和效率。定子100、转子102和定子104的轴向构形允许形成较小的空气间隙130和132,而不管转子102、定子100和104的尺寸如何,因而降低了制造大型电机的成本。这种机器可以容纳许多凸极,从而使它在低转子转速下具有高的输出。另外,由于上述轴向构形,所以转子102在高转子速度下的径向膨胀没有减小空气间隙130和132,这一点,再加上转子102的平滑形状减小了空气阻力(空气摩擦损失),这一事实构成了高速操作能力的另一优点。
另外,双凸极轴向磁通永磁电机的槽口漏磁被减小到最小,因为为了产生高转矩,增大线圈126和128的宽度Wc而没有增加槽口深度Ds。如本说明书前一部分中所详细说明的那样,尽量减小槽口深度Ds将会减小槽口漏磁。
图17至24中例示出本发明上述实施例的操作。当转子凸极108完全与定子凸极110对准时,永磁体106完全与定子凸极112(图17)对齐。转子102的这种取向(相当于转子转动0°角)使永磁体106产生的所有磁链127均穿过定子100的A相绕组(图17中未示出)。在此时没有任何磁链穿过定子104的B相绕组(图17未示出)。
当转子102转过22.5°角(图18)时,凸极110和112与转子102的电磁凸极108部分对齐,因而由永磁体106产生的磁链127等同地分布在定子100和定子104之间。在此时,穿过A相绕组(图18未示出)的磁力线等于穿过B相绕组(图18未示出)的磁力线。
在转子102转过45°时(图19),定子凸极110完全与永磁体106对齐,而定子凸极112完全与转子电磁凸极108对齐。在转子102的这种取向时,由永磁体106产生的所有磁链均穿过定子104的B相绕组(图19未示出)。
在图20、21、22、23和24中分别示出转子102转动到67.5°、90°、112.5°、135°和157.5°时的磁通分布。在图25和26中分别示出对应于0~180°机械转动角度的穿过A相和B相绕组的磁链127的曲线。双凸极轴向磁通永磁电机A相电流和B相电流之间的相位移是90°电角度。
因此提供了一种永磁电极,该电极克服了上述缺点,例如尽量减小了槽口漏磁、具有电磁平衡的相、制造简便且成本低、能够在低速和高速两个速度下运转、容易散热、而且结构紧凑且效率高。
双凸极轴向磁通永磁电极因其能在低角速度下达到高的能量密度、能够容纳数目多的凸级、可以利用常规的具有低电感绕组的绕组结构、且只需采用简单的支承结构而表现出很大的优越性。
还可以提供所述设备的很多其它变形,在此将描述其中的一些。例如,双凸极轴向磁通永磁电极的定子凸极数目可以为大于2的任何偶数。另外,定子凸极(例如定子100的)与转子凸极之比不要求为1∶1。根据电机尺寸,该比值可以按以下公式改变:
R=S+2式中
S=定子凸极数目
R=转子凸极数目其次,也可以提出其它合适的定子/转子凸极配置,例如,两个定子凸极可以与任何其它大于4的偶数个转子凸极相组合,例如2/6、2/8……2/100等。还可以形成其它的组合,例如4/8、4/10、4/12……;6/10、6/12、6/14……,等等。
另外,A相和B相绕组的线圈可以配置成使得各个定子既包括A相的线圈也包括B相的线圈。图27示意出具有六极转子150、第一双构件定子152和第二双构件定子156的双凸极轴向磁通永磁电机。转子150包括永磁体155和电磁凸极157。定子152包括具有凸极151的A相构件160和具有凸极153的B相构件162。定子156包括具有凸极154的B相构件164和具有凸极158的A相构件168。A相构件160和168的凸极支承串联的包括A相绕组的线圈170。B相构件162和164的凸极支承串联的包括B相绕组的线圈172。在图27中,转子150相对于定子152和156的取向使得由永磁体155产生的所有磁链穿过A相绕组的线圈170。此实施例的另一种布局方法是,在转子电磁凸极的数目R是10的整倍数时,定子凸极S的数目按公式S=R(4/5)进行计算。
图28示出具有双转子结构的双凸极轴向磁通永磁电机。该电机包括第一定子200、第一转子202、第二定子204、第二转子206和第三定子208,它们均为环形。定子200、204和208分别包括铁座210、212和214。定子200具有许多纵向的定子凸极216,定子208具有许多纵向的定子凸极218。凸极216和218围绕其相应定子200和208均匀间隔开。定子204具有两排并列的纵向凸极220(a)和220(b),其中凸极220(a)和220(b)围绕定子204均匀间隔开。
许多铜线圈222、224(a)、224(b)和226相应连接,使得线圈222和226构成A相绕组,而线圈224(a)和(b)构成B相绕组。线圈222和226配置在定子凸极216和218上,而线圈224(a)和(b)配置在定子凸极220(a)和(b)上。
图29示出,转子202和206由分别与多个转子电磁凸极207和209交替配置的多个纵向永久磁体203和205构成,该转子电磁凸极分别由叠层钢制成。间隙G1、G2、G3和G4分别分开定子200和转子202、转子202和定子204、定子204和转子206,以及转子206和定子208。
如图28所示,转子202和206用例如螺纹紧固件230和231刚性固定在转子支承件228上。转子支承件228用焊接(未示出)固定于主轴232上。主轴232可转动地支承在具有端面236、238和筒体240的机壳234内,并且可以直接连接于例如风轮机的转子235上。定子200和208分别用例如螺纹紧固件242和244刚性固定在端面236和238上。定子204用例如螺纹紧固件246刚性固定在筒体240上。
在定子凸极的数目等于转子电磁凸极数目(图29)的情况下,定子200、204和208的取向使得当凸极207和209与定子204的凸极220完全对准时,永磁体203便完全与凸极216对齐,并且永磁体205完全与凸极218对齐。转子202和206的这种取向使得由永磁体203和205产生的磁链127穿过B相绕组的线圈224(a)和(b)(图28中未示出)。同样,当永磁体203和205完全与凸极220对齐(图30)时,凸极207和209便分别与凸极216和218完全对齐。转子202和206的这种取向使得由永磁体203和205产生的磁链127完全穿过A相绕组的线圈222和226(图30中未示出)。
双凸极轴向磁通永磁电机不限于单转子或双转子结构。还可以采用三个或更多个转子,并且转子凸极与定子凸极之比也可以不同。
另外,还可形成如图31所示的径向磁通形式的双凸极永磁电极。这种电机包括外部定子300以及与外部定子300同心的内部定子302。定子300包括许多径向等间隔配置的面向内的凸极304。绕在凸极304上且串联的许多铜线圈306构成A相绕组。定子302包括许多径向等距间隔开的面向外的凸极308。绕在凸极308上且串联的许多铜线圈310构成B相绕组。定子300和302分别具有座铁312和314。
同心的转子316位于外部定子300和内部定子302之间。转子316包括许多永磁体318,该永磁体与相等数目的由例如叠层钢制成的转子电磁凸极320交替配置。永磁体围绕转子316均匀间隔开,其数目等于凸极304和308的数目。转子316可直接连接于风轮机转子(未示出)上。本发明此实施例的操作原理与上述双凸极轴向磁通永磁电机的原理相同。
如同本发明的轴向磁通实施例那样,转子凸极数目和定子凸极数目之间的关系可以改变。另外,这种电机的线圈不一定连接成使得一个定子的线圈构成A相绕组而另一定子的线圈构成B相绕组。
上述双凸极永磁电机的构形仅仅是示例性的。因此,本发明的范围不应当由这些所示的例子确定,而应当由所附属的权利要求书和其等同物确定。
Claims (30)
1.一种双凸极永磁电机,它包括:
至少两个彼此共轴固定的定子;
至少一个位于上述至少两个定子之间的转子;和
由上述至少两个定子支承的两相绕组。
2.如权利要求1所述的双凸极永磁电机,其特征在于,上述至少两个定子中的每个定子均包括许多定子凸极并具有对称轴线。
3.如权利要求2所述的双凸极永磁电机,其特征在于,上述定子凸极相对于上述对称轴线沿纵向成形。
4.如权利要求2所述的双凸极永磁电机,其特征在于,上述定子凸极相对于上述对称轴线沿径向成形。
5.如权利要求1所述的双凸极永磁电机,其特征在于,上述至少一个转子包括许多永磁体。
6.如权利要求5所述的双凸极永磁电机,其特征在于,上述永磁体与用导磁材料制成的转子电磁凸极交替配置。
7.如权利要求6所述的双凸极永磁电机,其特征在于,每个上述转子电磁凸极具有第一和第二侧,上述永磁体极化成使得上述第一侧的磁性极化度与上述第二侧相同。
8.如权利要求1所述的双凸极永磁电机,其特征在于,上述两相绕组包括第一和第二组线圈。
9.一种双凸极轴向磁通永磁电机,它包括:
至少两个彼此共轴并沿横向配置的定子;
至少一个配置在上述至少两个定子之间的转子;和
具有第一相和第二相的绕组,上述绕组由上述至少两个定子支承。
10.如权利要求9所述的双凸极轴向磁通永磁电机,其特征在于,上述至少两个定子中的每个定子均具有许多定子凸极和对称轴线。
11.如权利要求10所述的双凸极轴向磁通永磁电机,其特征在于,上述定子凸极围绕上述至少两个定子中的各定子均匀间隔开,并相对于上述对称轴线沿纵向成形。
12.如权利要求9所述的双凸极轴向磁通永磁电机,其特征在于,上述至少一个转子包括许多永磁体,该永磁体围绕上述至少一个转子均匀间隔开并且在其间设置有由导磁材料制成的转子电磁凸极,每个上述转子电磁凸极具有第一和第二侧,上述永磁体极化成使得上述第一侧的磁性极化度与上述第二侧的相同。
13.如权利要求9所述的双凸极轴向磁通永磁电机,其特征在于,上述第一相包括串联的第一组线圈,上述第二相包括串联的第二组线圈。
14.如权利要求13所述的双凸极轴向磁通永磁电机,其特征在于,上述第一组线圈由上述至少两个定子中的一个定子支承,而上述第二组线圈由上述至少两个定子中的另一个定子支承。
15.一种双凸极轴向磁通永磁电机,它包括:
至少两个彼此共轴且沿横向配置的定子,上述至少两个定子中的每个定子均具有对称轴线和S个定子凸极,该数目S是等于或大于2的偶数,上述定子凸极围绕上述至少两个定子中的各定子均匀间隔开,上述定子凸极相对于上述对称轴线沿纵向成形;
配置在上述至少两个定子之间的至少一个转子,上述至少一个转子包括P个永磁体,P是等于或大于2的偶数,上述永磁体围绕上述至少一个转子均匀间隔开并且与R个用导磁材料制成的转子电磁凸极交替配置,该R是等于P的整数;和
具有第一相和第二相的绕组,上述绕组由上述至少两个定子支承,上述第一相包括串联的第一组线圈,而上述第二相包括串联的第二组线圈。
16.如权利要求15所述的双凸极轴向磁通永磁电机,其特征在于,R=S。
17.如权利要求15所述的双凸极轴向磁通永磁电机,其特征在于,R=S+2。
18.如权利要求15所述的双凸极轴向磁通永磁电机,其特征在于,R=S+X,X是等于或大于4的偶数。
19.如权利要求15所述的双凸极轴向磁通永磁电机,其特征在于,上述第一组的线圈绕在上述至少两个定子中一个定子的定子凸极上,而上述第二组的线圈绕在上述至少两个定子中另一个定子的定子凸极上。
20.如权利要求15所述的双凸极轴向磁通永磁电极,其特征在于,上述第一组的线圈绕在上述至少两个定子中的两个定子的定子凸极上,而上述第二组的线圈也绕在上述至少两个定子中的两个定子的定子凸极上。
21.如权利要求20所述的双凸极轴向磁通永磁电机,其特征在于,R是10的倍数并且S=R(4/5)。
22.如权利要求15所述的双凸极轴向磁通永磁电机,其特征在于,上述线圈包含铜,上述导磁材料包含钢,上述至少两个定子包含钢片叠层。
23.一种双凸极轴向磁通永磁电机,它包括:
至少三个彼此共轴且沿横向配置的定子;
至少两个插置在上述至少三个定子中的转子;和
包括第一相和第二相的绕组,上述绕组由上述至少三个定子支承。
24.如权利要求23所述的双凸极轴向磁通永磁电机,其特征在于,上述至少三个定子形成第一横向定子、第二横向定子和中间定子,上述至少三个定子中的每个定子均具有S个定子凸极,该S是等于或大于2的偶数,上述第一相包括第一组线圈,上述第二相包括第二组线圈,上述第一组线圈绕在上述中间定子的定子凸极上,上述第二组线圈绕在上述第一横向和第二横向定子的定子凸极上。
25.如权利要求24所述的双凸极轴向磁通永磁电机,其特征在于,上述至少两个转子中的每个转子均具有P个永磁体,该P是等于或大于2的偶数,上述永磁体与R个由导磁材料制成的转子电磁凸极交替配置,该R是等于P的整数。
26.如权利要求25所述的双凸极轴向磁通永磁电机,其特征在于,R=S。
27.如权利要求25所述的双凸极轴向磁通永磁电机,其特征在于,R=S+2。
28.如权利要求25所述的双凸极轴向磁通永磁电极,其特征在于,R=S+X,X是等于或大于4的偶数。
29.一种用于直接驱动风轮机的双凸极永磁电机,它包括:
至少两个彼此共轴配置的定子;
至少一个转子,它插置在上述至少两个定子之间且刚性地连接于风轮机转子上;和
两相绕组,该绕组由上述至少两个定子支承并通过电子换流器电连接到公用电网上。
30.如权利要求29所述的双凸极永磁电机,其特征在于,上述电子换流器包括电连接到上述公用电网上的三相换流器和电连接到上述两相绕组上的两相换流器,上述三相换流器由直流线路连接于上述两相换流器。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US40802995A | 1995-03-21 | 1995-03-21 | |
| US08/408,029 | 1995-03-21 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN1214809A true CN1214809A (zh) | 1999-04-21 |
Family
ID=23614568
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN96193837A Pending CN1214809A (zh) | 1995-03-21 | 1996-03-20 | 双凸极永磁电机 |
Country Status (10)
| Country | Link |
|---|---|
| EP (1) | EP0815633A4 (zh) |
| JP (1) | JPH11511948A (zh) |
| KR (1) | KR19980703186A (zh) |
| CN (1) | CN1214809A (zh) |
| AU (1) | AU5258596A (zh) |
| CA (1) | CA2215971A1 (zh) |
| IL (1) | IL116631A0 (zh) |
| MX (1) | MX9707118A (zh) |
| NO (1) | NO974345L (zh) |
| WO (1) | WO1996029774A1 (zh) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2003007456A1 (fr) * | 2001-07-10 | 2003-01-23 | Hebin Bai | Machine a aimants permanents du type raboteuse dotee de fentes radiales pour enroulement d'induit et champ magnetique axial |
| CN100386953C (zh) * | 2005-01-19 | 2008-05-07 | 南京航空航天大学 | 混合励磁双凸极永磁同步电机 |
| WO2008124971A1 (fr) * | 2007-04-16 | 2008-10-23 | Weidong Gu | Ensemble d'aérogénérateur autonome |
| CN100433533C (zh) * | 2006-11-06 | 2008-11-12 | 何世政 | 永磁式电机转子 |
| CN101771319B (zh) * | 2008-12-31 | 2012-07-04 | 台达电子工业股份有限公司 | 无刷直流马达及其驱动单元 |
| CN103762758A (zh) * | 2014-01-08 | 2014-04-30 | 南京理工大学 | 转子聚磁式横向磁通永磁盘式风力发电机 |
| CN106411006A (zh) * | 2016-11-15 | 2017-02-15 | 华中科技大学 | 一种轴向磁通永磁体的爪极结构转子 |
| CN108233608A (zh) * | 2018-03-22 | 2018-06-29 | 宁德时代电机科技有限公司 | 一种集成无损自动制动的永磁电机装置 |
| CN108370178A (zh) * | 2015-12-03 | 2018-08-03 | 三菱电机株式会社 | 轴向间隙型旋转电机及其制造方法 |
Families Citing this family (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19838378A1 (de) * | 1998-08-24 | 2000-03-02 | Magnet Motor Gmbh | Elektrische Maschine mit Dauermagneten |
| DE19856647B4 (de) * | 1998-12-09 | 2007-03-01 | Canders, Wolf-R., Prof. Dr.-Ing. | Elektrischer Hochmomentmotor |
| CN100490279C (zh) | 1999-02-10 | 2009-05-20 | 维斯塔斯风力系统公司 | 具有轴向磁通的多极电动机/发电机 |
| NL1011876C2 (nl) * | 1999-04-23 | 2000-10-24 | Aerpac Holding B V | Generator. |
| AU2001274396A1 (en) | 2000-05-23 | 2001-12-03 | Vestas Wind Systems A/S | Variable speed wind turbine having a matrix converter |
| US6946750B2 (en) | 2000-08-14 | 2005-09-20 | Aloys Wobben | Wind power plant having a power generation redundancy system |
| DE10040273A1 (de) * | 2000-08-14 | 2002-02-28 | Aloys Wobben | Windenergieanlage |
| WO2003036083A1 (fr) * | 2001-10-25 | 2003-05-01 | Nsk Ltd. | Generateur d'energie eolienne |
| US7088029B2 (en) * | 2001-12-25 | 2006-08-08 | Keiji Hiramatsu | Generator |
| US7015595B2 (en) | 2002-02-11 | 2006-03-21 | Vestas Wind Systems A/S | Variable speed wind turbine having a passive grid side rectifier with scalar power control and dependent pitch control |
| US7982352B2 (en) | 2002-09-18 | 2011-07-19 | Vestas Wind Systems A/S | Electrical motor/generator having a number of stator pole cores being larger than a number of rotor pole shoes |
| US7446447B2 (en) | 2002-11-18 | 2008-11-04 | Seiko Epson Corporation | Magnetic structure and motor employing said magnetic structure, and driver comprising said motor |
| JP4323941B2 (ja) * | 2002-12-20 | 2009-09-02 | 新日本製鐵株式会社 | 励磁機、界磁機およびそれを用いた同期機 |
| US9093874B2 (en) | 2004-10-25 | 2015-07-28 | Novatorque, Inc. | Sculpted field pole members and methods of forming the same for electrodynamic machines |
| JP4577068B2 (ja) * | 2005-03-31 | 2010-11-10 | 株式会社エクォス・リサーチ | 回転電機 |
| JP4692090B2 (ja) * | 2005-06-16 | 2011-06-01 | 株式会社富士通ゼネラル | アキシャルエアギャップ型電動機 |
| NO20054704D0 (no) | 2005-10-13 | 2005-10-13 | Sway As | Fremgangsmate og metode for vindkraftverk og fremdriftssystem med magnetisk stabilt hovedlager og lastkontrollsystem |
| JP5172090B2 (ja) * | 2005-11-22 | 2013-03-27 | 株式会社グローバルエナジー | 多頭発電機 |
| WO2007141948A1 (ja) | 2006-06-06 | 2007-12-13 | Honda Motor Co., Ltd. | モータおよびモータ制御装置 |
| JP2008271640A (ja) | 2007-04-17 | 2008-11-06 | Honda Motor Co Ltd | アキシャルギャップ型モータ |
| JP4707696B2 (ja) | 2007-06-26 | 2011-06-22 | 本田技研工業株式会社 | アキシャルギャップ型モータ |
| JP4961302B2 (ja) | 2007-08-29 | 2012-06-27 | 本田技研工業株式会社 | アキシャルギャップ型モータ |
| JP4729551B2 (ja) | 2007-10-04 | 2011-07-20 | 本田技研工業株式会社 | アキシャルギャップ型モータ |
| US7977843B2 (en) | 2007-10-04 | 2011-07-12 | Honda Motor Co., Ltd. | Axial gap type motor |
| JP5176225B2 (ja) * | 2007-11-12 | 2013-04-03 | スミダコーポレーション株式会社 | 回転型電磁発電機 |
| JP4816679B2 (ja) * | 2008-05-23 | 2011-11-16 | 日産自動車株式会社 | アキシャルギャップモータ構造 |
| US7906883B2 (en) | 2008-06-02 | 2011-03-15 | Honda Motor Co., Ltd. | Axial gap motor |
| US8049389B2 (en) | 2008-06-02 | 2011-11-01 | Honda Motor Co., Ltd. | Axial gap motor |
| ITFI20080163A1 (it) * | 2008-09-03 | 2010-03-04 | Leonardo Lenzi | Macchina elettrica rotante. |
| IT1391500B1 (it) | 2008-09-03 | 2011-12-30 | Lenzi | Macchina elettrica rotante |
| JP4678549B2 (ja) | 2008-10-09 | 2011-04-27 | 本田技研工業株式会社 | アキシャルギャップ型モータ |
| JP2010207046A (ja) * | 2009-03-06 | 2010-09-16 | Nisca Corp | 発電機及びこれを備えた発電システム |
| WO2011096888A1 (en) * | 2010-02-02 | 2011-08-11 | Akribis Systems Pte Ltd | Permanent magnet motors without magnet back iron |
| FR2957208B1 (fr) * | 2010-03-04 | 2012-03-09 | Erneo | Machine electrique polydiscoide polyphasee a aimants. |
| JP5477161B2 (ja) * | 2010-05-20 | 2014-04-23 | 株式会社デンソー | ダブルステータ型モータ |
| JP5481456B2 (ja) * | 2011-10-05 | 2014-04-23 | 和明 小林 | 回転電機 |
| KR101287335B1 (ko) * | 2012-03-20 | 2013-07-23 | 한양대학교 에리카산학협력단 | 2상 영구자석 동기전동기 |
| FR3063400B1 (fr) | 2017-02-24 | 2021-11-19 | Leroy Somer Moteurs | Machine electrique tournante a flux axial |
| DE102019202630A1 (de) * | 2019-02-27 | 2020-08-27 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Elektromotor |
| JP6972055B2 (ja) * | 2019-03-12 | 2021-11-24 | 株式会社東芝 | 回転電機、回転電機システム、車、発電装置、昇降装置、および、ロボット |
| CN110011504B (zh) * | 2019-05-05 | 2023-10-31 | 大国重器自动化设备(山东)股份有限公司 | 用于机器人的单输出轴伺服电机 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SE408841B (sv) * | 1977-11-10 | 1979-07-09 | Asea Ab | Axialfeltmaskin med permanentmagnetrotor |
| FR2606951A1 (fr) * | 1986-11-13 | 1988-05-20 | Alsthom Cgee | Moteur a aimants |
| DE3705089A1 (de) * | 1987-02-13 | 1988-08-25 | Weh Herbert | Transversalflussmaschine in sammleranordnung |
| DE68910649T2 (de) * | 1988-11-22 | 1994-05-19 | Shinko Electric Co Ltd | Betätigungsgerät mit starker magnetischer Schiebekraft. |
| US5184040A (en) * | 1989-09-04 | 1993-02-02 | Lim Jong H | Electric power generators having like numbers of magnets and coils |
| US5117141A (en) * | 1990-07-30 | 1992-05-26 | The United States Of America As Represented By Department Of Energy | Disc rotors with permanent magnets for brushless DC motor |
| US5168187A (en) * | 1991-02-20 | 1992-12-01 | Dana Corporation, Warner Electric Brake & Clutch Division | Axial pole stepping motor |
| WO1993015547A1 (en) * | 1992-01-29 | 1993-08-05 | Stridsberg Innovation Ab | Brushless dc motors/generators |
| US5397953A (en) * | 1993-11-17 | 1995-03-14 | The United States Of America As Represented By The Secretary Of The Navy | Stator for disc type electric motor |
-
1995
- 1995-12-31 IL IL11663195A patent/IL116631A0/xx unknown
-
1996
- 1996-03-20 JP JP8528638A patent/JPH11511948A/ja active Pending
- 1996-03-20 WO PCT/US1996/003929 patent/WO1996029774A1/en not_active Application Discontinuation
- 1996-03-20 AU AU52585/96A patent/AU5258596A/en not_active Abandoned
- 1996-03-20 KR KR1019970706589A patent/KR19980703186A/ko not_active Application Discontinuation
- 1996-03-20 EP EP96908891A patent/EP0815633A4/en not_active Withdrawn
- 1996-03-20 CA CA002215971A patent/CA2215971A1/en not_active Abandoned
- 1996-03-20 CN CN96193837A patent/CN1214809A/zh active Pending
-
1997
- 1997-09-19 MX MX9707118A patent/MX9707118A/es unknown
- 1997-09-19 NO NO974345A patent/NO974345L/no unknown
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2003007456A1 (fr) * | 2001-07-10 | 2003-01-23 | Hebin Bai | Machine a aimants permanents du type raboteuse dotee de fentes radiales pour enroulement d'induit et champ magnetique axial |
| CN100386953C (zh) * | 2005-01-19 | 2008-05-07 | 南京航空航天大学 | 混合励磁双凸极永磁同步电机 |
| CN100433533C (zh) * | 2006-11-06 | 2008-11-12 | 何世政 | 永磁式电机转子 |
| CN101042112B (zh) * | 2007-04-16 | 2012-10-17 | 顾为东 | 大功率非并网风力发电机组 |
| US8138619B2 (en) | 2007-04-16 | 2012-03-20 | Weidong Gu | Non-grid-connected wind turbine with double-stator double-salient brushless dc-generator |
| WO2008124971A1 (fr) * | 2007-04-16 | 2008-10-23 | Weidong Gu | Ensemble d'aérogénérateur autonome |
| CN101771319B (zh) * | 2008-12-31 | 2012-07-04 | 台达电子工业股份有限公司 | 无刷直流马达及其驱动单元 |
| CN103762758A (zh) * | 2014-01-08 | 2014-04-30 | 南京理工大学 | 转子聚磁式横向磁通永磁盘式风力发电机 |
| CN108370178A (zh) * | 2015-12-03 | 2018-08-03 | 三菱电机株式会社 | 轴向间隙型旋转电机及其制造方法 |
| CN108370178B (zh) * | 2015-12-03 | 2021-12-03 | 三菱电机株式会社 | 轴向间隙型旋转电机及其制造方法 |
| CN106411006A (zh) * | 2016-11-15 | 2017-02-15 | 华中科技大学 | 一种轴向磁通永磁体的爪极结构转子 |
| CN106411006B (zh) * | 2016-11-15 | 2018-07-24 | 华中科技大学 | 一种轴向磁通永磁体的爪极结构转子 |
| CN108233608A (zh) * | 2018-03-22 | 2018-06-29 | 宁德时代电机科技有限公司 | 一种集成无损自动制动的永磁电机装置 |
| CN108233608B (zh) * | 2018-03-22 | 2023-09-15 | 宁德时代电机科技有限公司 | 一种集成无损自动制动的永磁电机装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP0815633A4 (en) | 1998-07-08 |
| CA2215971A1 (en) | 1996-09-26 |
| NO974345D0 (no) | 1997-09-19 |
| IL116631A0 (en) | 1996-03-31 |
| KR19980703186A (ko) | 1998-10-15 |
| WO1996029774A1 (en) | 1996-09-26 |
| NO974345L (no) | 1997-11-19 |
| MX9707118A (es) | 1998-06-28 |
| JPH11511948A (ja) | 1999-10-12 |
| EP0815633A1 (en) | 1998-01-07 |
| AU5258596A (en) | 1996-10-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1214809A (zh) | 双凸极永磁电机 | |
| CN1340238A (zh) | 具有轴向磁通的多极电动机/发电机 | |
| CN1956302A (zh) | 用于动力应用的超导单极感应交流发电机 | |
| CN1592034A (zh) | 电动发电机 | |
| CN101572464B (zh) | Halbach阵列并列转子混合励磁无刷同步电机 | |
| CN1761130A (zh) | 一种永磁同步电动机 | |
| CN1288284A (zh) | 一种交流电机 | |
| CN105322667B (zh) | 旋转电机 | |
| CN1945939A (zh) | 双机械端口电机及其驱动控制系统 | |
| CN103178667A (zh) | 轴向磁场双定子游标电机 | |
| EP3082224A1 (en) | System and method for supporting laminations of synchronous reluctance motors | |
| Kouhshahi et al. | An axial flux focusing magnetically geared generator for low input speed applications | |
| CN104682621B (zh) | 轴向磁场滑差同步式双直风力发电机 | |
| CN101262151B (zh) | 低速大转矩永磁无刷电机的分数槽绕组 | |
| Besharati et al. | Investigation of the mechanical constraints on the design of a super-high-speed switched reluctance motor for automotive traction | |
| CN102545501A (zh) | 一种轴向双定子无刷双馈电机 | |
| Fan et al. | Investigation of a new flux-modulated permanent magnet brushless motor for EVs | |
| CN100405704C (zh) | 低速大转矩永磁无刷电机的分数槽绕组 | |
| CN105391261B (zh) | 气隙磁场正弦分布的隐极同步电机转子结构参数确定方法 | |
| CN202435218U (zh) | 一种轴向无刷双馈电机 | |
| RU2152118C1 (ru) | Многополюсный тихоходный торцевой синхронный электрический генератор | |
| CN109256879A (zh) | 一种内外层永磁体错位的双定子电机 | |
| CN103904856A (zh) | 一种具有初始自励磁能力的无刷谐波励磁同步发电机 | |
| Zheng et al. | Electromagnetic analysis of a novel cylindrical transverse-flux permanent-magnet linear machine | |
| Bumby et al. | Axial flux, permanent magnet, generators for engine integration |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |