CN1206410C - 整治轨道用机械 - Google Patents
整治轨道用机械 Download PDFInfo
- Publication number
- CN1206410C CN1206410C CNB021301506A CN02130150A CN1206410C CN 1206410 C CN1206410 C CN 1206410C CN B021301506 A CNB021301506 A CN B021301506A CN 02130150 A CN02130150 A CN 02130150A CN 1206410 C CN1206410 C CN 1206410C
- Authority
- CN
- China
- Prior art keywords
- track
- track lifting
- drive unit
- framework
- disk
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000008439 repair process Effects 0.000 title claims description 7
- 230000007246 mechanism Effects 0.000 title claims description 6
- 238000005096 rolling process Methods 0.000 claims abstract description 5
- 230000001105 regulatory effect Effects 0.000 claims description 7
- 229910000831 Steel Inorganic materials 0.000 claims description 4
- 239000010959 steel Substances 0.000 claims description 4
- 230000001154 acute effect Effects 0.000 claims description 2
- 230000009975 flexible effect Effects 0.000 claims description 2
- 230000015572 biosynthetic process Effects 0.000 claims 1
- 230000009471 action Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000005065 mining Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
Images

Classifications
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01B—PERMANENT WAY; PERMANENT-WAY TOOLS; MACHINES FOR MAKING RAILWAYS OF ALL KINDS
- E01B27/00—Placing, renewing, working, cleaning, or taking-up the ballast, with or without concurrent work on the track; Devices therefor; Packing sleepers
- E01B27/06—Renewing or cleaning the ballast in situ, with or without concurrent work on the track
- E01B27/10—Renewing or cleaning the ballast in situ, with or without concurrent work on the track without taking-up track
Landscapes
- Engineering & Computer Science (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Machines For Laying And Maintaining Railways (AREA)
- Electrical Discharge Machining, Electrochemical Machining, And Combined Machining (AREA)
- Replacement Of Web Rolls (AREA)
- Threshing Machine Elements (AREA)
- Turning (AREA)
- Lift-Guide Devices, And Elevator Ropes And Cables (AREA)
- Jib Cranes (AREA)
- Train Traffic Observation, Control, And Security (AREA)
Abstract
本发明提供一种整治轨道(3)用的机械(1)。该机械具有一个支承在轨行机构(4)上并装有起道机组(12)的机架(5)。起道机组(12)配备有通过起道驱动装置(27)调节高度并与机架(5)相连的起道构架(13)。起道构架为轨道(3)的每根钢轨(16)装有两个依钢轨纵向相隔一定距离的起道圆盘(24)的圆盘对(23),利用横向调节驱动装置(25)可使起道圆盘(24)的依轨道的横向地相对彼此张合。起道构架还装有带缘滚轮(14),以便能在钢轨(16)的踏面(15)上滚行。起道圆盘(24)的每个圆盘对(23)能利用高度调节驱动装置(26)独立地调整相对起道构架(13)的高度。伴随两个依轨道横向相邻布置的起道圆盘(24)的分开动作,自动起动高度调节驱动装置(26),以相对于起道构架(13)降下两个起道圆盘(24)。
Description
技术领域
本发明涉及一部整治轨道用的机械。
背景技术
发挥夹钳作用的成对起道圆盘与轨头形状匹配地装接(formschlüssig)在一起,并能沿轨头下侧滚动,使机械作业时得以连续前进。如果遇到障碍物或形状很不正常的钢轨,前后排列的两对起道圆盘相继张开,并在通过有问题的地点之后再重新闭合,这样就可以保证至少有一对起道圆盘能始终不间断地夹住钢轨。
US 4893565号专利介绍了一种捣固车。可以用驱动装置调节它的夹取机构的高度,这样就有可能使夹轨钩与轨头,或有选择地也与轨底咬合。
发明内容
本发明的目的是提供一种标准型机械,要求这部机械能较容易又较可靠地越过钢轨断面有变化的区段。
根据本发明,提供一种整治轨道用的机械,包括一个支承在轨行机构上的机架,机架装有作业机组和起道机组;其中起道机组配备有通过起道驱动装置与机架相连的、高度可调节的起道构架;起道构架为轨道的每根钢轨装有两对依钢轨纵向相隔一定距离的起道圆盘,利用横向调节驱动装置能使起道圆盘依轨道横向相对彼此张合;起道构架还装有带缘滚轮,以便能在钢轨踏面上滚行;其中,可以用高度调节驱动装置单独调整每对起道圆盘相对起道构架的高度,而且伴随着两个依轨道横向彼此相邻布置的起道圆盘的分开动作,自动作动高度调节驱动装置,以相对于起道构架降下两个起道圆盘。
这种结构的起道机组的优点是,为了通过某一障碍物或断面有变化的钢轨而暂时分开的一对起道圆盘,在越过该地方以后,又能可靠而顺利地闭合,确切地说又能向彼此合拢。这一点对轨排抬起较高时具有特殊意义。因为起道圆盘形成的夹钳分开时,必然会使轨排落下,从而改变钢轨的弯曲曲线。由于起道圆盘能自动降下,这就用简单的方法和非常可靠的方式补偿了轨道的、确切地说补偿了所夹持钢轨的垂直变位,从而使起道圆盘能立即处在相对轨头的正确位置上。此项调整过程是自动进行的,所以不需要机械操作人员为此付出特别的注意力,而且还可避免发生偏差而在作业中对安全性产生侵害。
根据本发明的另一方面,起道圆盘圆盘对合拢后,轨排即被抬起而又恢复到原来所处的位置,以保证作业能畅通地继续进行。
本发明的其它优点可参看各项权利要求和说明。
附图说明
下文将参照图示的优选实施例来阐明本发明。附图中,
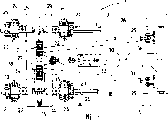
图1为根据本发明的装有起道机组的整治轨道用的机械的侧视草图,
图2和3分别为起道机组的放大侧视图和俯视图,
图4为依轨道纵向的起道机组前视图。
具体实施方式
图1所示用于整治轨道3道床2的机械1包括一个支承在轨行机构4上的机架5。机架5上装有引到轨道3下方的循环挖掘链7形式的作业机组6,用于挖掘道床2。挖掘链7配备有传送带8,用于输送收取的道碴。另外的用于回填清洁的或新道碴的传送带9依作业方向的位于机械1挖掘链7后面。箭头10表示作业方向。其它机械11(未详细示出)连挂在机架5两端。
在挖掘链7范围内有一套起道机组12固定在机架5上,其结构将用图2,3和4做进一步展示。起道机组12有一个依轨道横向大约水平延伸的起道构架13。滑动支架17支撑在起道构架13上,利用横向导轨18能依轨道的横向相对于起道构架13移动;为此滑动支架17与移动驱动装置19相连。起道机组12在所展示的作业位置时利用带缘滚轮14支承在轨道3钢轨16的踏面15上,确切地说在钢轨踏面上滚行。
滑动支架17在每根钢轨16的范围内分别有两根依机械纵向相隔一定距离的垂直导向柱20。导向柱上装有液压缸22形式的圆盘支架21(a rollercarrier),利用液压可以调节其高度。(另一可取的结构形式是利用液压缸22的活塞杆做为导向柱20,这样就可以直接与滑动支架17相连)。在每个高度可调的圆盘支架21上分别有两个起道圆盘24,组成了圆盘对23;利用横向移动驱动装置25可使起道圆盘在轨道横向相对彼此张合。这样在滑动支架17上就为轨道3的每根钢轨16配备了两个依钢轨纵向相隔一定距离的、能与钢轨形状匹配地装接的起道圆盘24的圆盘对23。利用液压缸22组成的高度调节驱动装置26可以独立地调节每个圆盘对23相对起道构架13的高度。
操作室39内设有控制装置40(图1),它与起道圆盘24的横向调节驱动装置25和高度调节驱动装置26相连。对驱动装置25,26是这样进行控制的:就是伴随着圆盘对23依轨道横向相邻布置的两个起道圆盘24的分开动作,相应的高度调节驱动装置26自动作动,使起道圆盘24相对于起道构架13降下(对此将在下文做进一步描述)。此外还可通过控制装置40,使得横向调节驱动装置25为实现一个圆盘对23的两个起道圆盘24彼此相对运动的作动与高度调节驱动装置26为实现相对于起道构架13抬起两个起道圆盘24的作动联动。
起道机组12或起道构架13通过两个相互平行的、大约垂直延伸并依轨道横向相隔一定距离的起道驱动装置27高度可调地与机架5相连。此外,起道构架13还通过连接件28与机架5铰接在一起,并能围绕一根依轨道横向延伸的水平转动轴线29枢转。连接件28(侧视时近似于平行四边形)由两根拉杆30(tie rods)和一个类似于辕形的,确切地说一根T形牵引杆31组成。依轨道横向相隔一定距离的两根拉杆30处于一个共同的平面32内,牵引杆31则平行于平面32,但它与平面相隔一定距离并位于其下方。牵引杆31能伸缩并配备有长度调节驱动装置33。
拉杆30在各铰接点34处固定在起道构架13上侧。铰接点是一根依轨道横向延伸的、做为转动轴线29的轴35。上端36装在机架5上的起道驱动装置27,其下端37也在紧靠拉杆30处铰接在水平的轴35上。如图3所示,两根拉杆30相对机械1的一个垂直的纵向对称平面38镜象对称地安设并互成锐角。
机械1进行道床2整治作业时,用起道驱动装置27降下起道机组12并通过带缘滚轮14支承在轨道3的钢轨16上。然后用横向调节驱动装置25或同时也用高度调节驱动装置26,将起道圆盘24的圆盘对23与钢轨16形状匹配地装接在一起,随后再次起动起道驱动装置27将轨道3抬起,以便在轨道下面为使用作业机组6,或说为使用挖掘链7创造必要的作业空间。
为了使起道圆盘24与钢轨16实现形状匹配地装接,将伸缩式牵引杆31的长度调节驱动装置33置于无压状态,确切地说使它处于浮动状态,以便起道机组12适应轨道的纵向位置。此时起道构架13能围绕轴35所形成的转动轴线29转动(图2),这是因为拉杆30和起道驱动装置27的下端37均在同一根轴线29上与轴35铰接在一起。顺利地完成了轨道的纵向位置的调整、并且起道圆盘24贴靠了钢轨16以后,即锁闭牵引杆31的长度调节驱动装置33,使起道机组12稳定在轨道的纵向并保持在这个位置上。
作业时,如果在轨道3上连续滚行的起道机组12遇到障碍物,比如遇到图2和4所示的鱼尾板41形式的障碍物,就必须使起道圆盘24依轨道的横向短时间分开,并在越过障碍物以后再重新闭合。每个圆盘对23的起道圆盘24在正常作业时以一定的压力紧压在一起。遇到障碍物时,这个压力就被迫升高,此时控制装置40会利用横向调节驱动装置25自动起动相应圆盘对23的两个起道圆盘24的分开动作。起道圆盘对张开达到最大位置时,止挡42(图4)就会作动,进而引起高度调节驱动装置26的作动,使起道圆盘26降下。
控制装置40在下一步可以发挥这样的作用,比如利用一个定时元件与机械1的前进速度相配合,使起道圆盘24在经过轨道3上的问题位置后又自动闭合,以便重新夹持钢轨16。
因为起道圆盘24的降下动作与撑开动作是联动的,从而可以保证驶过鱼尾板41以后,在不损失时间的情况下,圆盘对23的张开的起道圆盘24即行闭合而又可靠地夹持钢轨16。为安全起见,后续的起道圆盘24的第二个圆盘对23只有前面的圆盘对先闭合后方能张开。
横向调节驱动装置25使起道圆盘24闭合后就会使另一个止档43(图4)动作。这个止挡通过控制装置40发挥这样的作用,就是起动横向调节驱动装置25使降下的圆盘对23的两个起道圆盘24能与在障碍物后面的钢轨16贴紧,同时也自动起动相应的高度调节驱动装置26作动,将两个起道圆盘24,也就是将轨道3抬起到相对于起道构架13的在先位置,以保证机械1的连续作业能不受阻碍地进行下去。
在附图中,1为机械;2为道床;3为轨道;4为轨行机构;5为机架;6为作业机组;7为挖掘链;8为传送带;9为传送带;10为箭头;11为机械;12为起道机组;13为起道构架;14为带缘滚轮;15为踏面;16为钢轨;17为滑动支架;18为横向导轨;19为移动驱动装置;20为导向柱;21为圆盘支架;22为液压缸;23为圆盘对;24为起道圆盘;25为横向调节驱动装置;26为高度调节驱动装置;27为起道驱动装置;28为连接件;29为转动轴线;30为拉杆;31为牵引杆;32为平面;33为长度调节驱动装置;34为铰接点;35为轴;36为端头;37为端头;38为纵向对称平面;39为操作室;40为控制装置;41为鱼尾板;42为止挡;43为止挡。
Claims (11)
1.一种整治轨道(3)用的机械(1),包括支承在轨行机构(4)上的机架(5),机架装有作业机组(6)和起道机组(12);其中起道机组(12)配备有通过起道驱动装置(27)与机架(5)相连的、高度可调节的起道构架(13);起道构架为轨道(3)的每根钢轨(16)装有两个依钢轨纵向相隔一定距离的由起道圆盘(24)组成的圆盘对(23),利用横向调节驱动装置(25)能使所述起道圆盘依轨道横向相对彼此张合;构架还装有带缘滚轮(14),以便能在钢轨(16)的踏面(15)上滚行;其特征在于,可以用高度调节驱动装置(26)独立调整起道圆盘(24)的每个圆盘对(23)相对起道构架(13)的高度,而且伴随着两个依轨道横向彼此相邻布置的起道圆盘(24)的分开动作,自动作动高度调节驱动装置(26),以相对于起道构架(13)降下两个起道圆盘(24)。
2.根据权利要求1所述的机械,其特征在于,伴随着横向调节驱动装置(25)的、实现一个圆盘对(23)的两个起道圆盘(24)彼此相对运动的作动,自动作动高度调节驱动装置(26),以便相对于起道构架(13)抬起两个起道圆盘(24)。
3.根据权利要求2所述的机械,其特征在于,组成圆盘对(23)的两个起道圆盘(24)共同固定在一个与起道构架(13)相连的、高度可调的圆盘支架(21)上。
4.根据权利要求3所述的机械,其特征在于,圆盘支架(21)是一个形成高度调节驱动装置(26)的液压缸(22),它装在一根与起道构架(13)相连的垂直导向柱(20)上,以利用液压调节高度。
5.根据权利要求3所述的机械,其特征在于,两个圆盘支架(21)通过共同的滑动支架(17)连接到起道构架(13)上,该滑动支架(17)设计用于利用移动驱动装置(19)沿轨道横向相对于起道构架(13)进行调节。
6.根据权利要求1至5中任一项所述的机械,其特征在于,除通过起道驱动装置(27)外,起道构架(13)还利用一个近似平行四边形的连接件(28)与机架(5)相连,并能围绕依轨道横向延伸的水平转动轴线(29)枢转。
7.根据权利要求6所述的机械,其特征在于,连接件(28)由两根依轨道横向相隔一定距离的、位于同一个平面(32)内的拉杆(30)和一根位于平面(32)以下、与之相隔一定距离并与之平行的牵引杆(31)组成。
8.根据权利要求7所述的机械,其特征在于,牵引杆(31)能伸缩并与长度调节驱动装置(33)相连。
9.根据权利要求7所述的机械,其特征在于,两根拉杆(30)在铰接点(34)处与起道构架(13)铰接在一起,铰接点是依轨道横向延伸的水平的轴(35)。
10.根据权利要求9所述的机械,其特征在于,起道机组(12)的依轨道横向相隔一定距离的起道驱动装置(27),其一端(36)装在机架(5)上,另一端(37)紧邻拉杆(30)中的一个与水平的轴(35)铰接在一起。
11.根据权利要求7至10中任一项所述的机械,其特征在于,两根拉杆(30)相对机械(1)的一个垂直的纵向对称平面(38)镜象对称地安设并互成锐角。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AT0134901A AT411276B (de) | 2001-08-24 | 2001-08-24 | Maschine zur bearbeitung eines gleises |
| ATA1349/2001 | 2001-08-24 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1401851A CN1401851A (zh) | 2003-03-12 |
| CN1206410C true CN1206410C (zh) | 2005-06-15 |
Family
ID=3688140
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB021301506A Expired - Fee Related CN1206410C (zh) | 2001-08-24 | 2002-08-23 | 整治轨道用机械 |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US6647892B2 (zh) |
| EP (1) | EP1288372B1 (zh) |
| JP (1) | JP4057373B2 (zh) |
| CN (1) | CN1206410C (zh) |
| AT (2) | AT411276B (zh) |
| CA (1) | CA2399596C (zh) |
| DE (1) | DE50203664D1 (zh) |
| ES (1) | ES2243687T3 (zh) |
| PL (1) | PL205070B1 (zh) |
| RU (1) | RU2228987C2 (zh) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7522568B2 (en) * | 2000-12-22 | 2009-04-21 | Terahop Networks, Inc. | Propagating ad hoc wireless networks based on common designation and routine |
| US7665576B2 (en) * | 2003-11-06 | 2010-02-23 | Pelletier Richard C | Movable safety barrier system |
| US7350467B2 (en) * | 2004-08-20 | 2008-04-01 | Loram Maintenance Of Way, Inc. | Long rail pick-up and delivery system |
| AT513609B1 (de) * | 2013-01-31 | 2014-06-15 | Plasser Bahnbaumasch Franz | Reinigungsmaschine zur Reinigung von Schotter eines Gleises |
| US9605386B2 (en) * | 2014-08-12 | 2017-03-28 | Harsco Corporation | Rail vehicle having roller clamp assembly and towing arm |
| KR101899867B1 (ko) * | 2016-11-09 | 2018-09-18 | 한상천 | 철도 선로 자갈보수 차량 및 이를 이용한 자갈 궤도 유지보수방법 |
| KR102197762B1 (ko) * | 2018-02-12 | 2021-01-04 | 류수경 | 도상 교체용 특수 철도차량 |
| CN112138946B (zh) * | 2020-09-29 | 2024-08-23 | 广州市景泰科技有限公司 | 一种智能点胶机的旋转轨道精确点胶装置 |
| CN113244075A (zh) * | 2021-06-01 | 2021-08-13 | 华中科技大学同济医学院附属协和医院 | 一种发药机器人 |
| CN113546919A (zh) * | 2021-07-30 | 2021-10-26 | 广东碧品居建筑工业化有限公司 | 四轴高柔性吸尘设备 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4643101A (en) * | 1982-11-23 | 1987-02-17 | Franz Plasser Bahnbaumaschinen-Industriegesellschaft M.B.H. | Mobile track leveling, lining and tamping machine |
| FR2559174B1 (fr) * | 1984-02-06 | 1986-10-24 | Framafer | Engin de travaux sur voie ferree a avancement continu |
| GB2201445B (en) * | 1987-02-27 | 1991-01-02 | Plasser Bahnbaumasch Franz | A travelling track maintenance machine, more especially a tamping, lifting and lining machine for switches and crossings |
| GB9116769D0 (en) * | 1991-08-02 | 1991-09-18 | Northern Eng Ind | Improvements in railway track maintenance machinery |
-
2001
- 2001-08-24 AT AT0134901A patent/AT411276B/de not_active IP Right Cessation
-
2002
- 2002-07-17 AT AT02450159T patent/ATE299968T1/de not_active IP Right Cessation
- 2002-07-17 DE DE50203664T patent/DE50203664D1/de not_active Expired - Lifetime
- 2002-07-17 EP EP02450159A patent/EP1288372B1/de not_active Expired - Lifetime
- 2002-07-17 ES ES02450159T patent/ES2243687T3/es not_active Expired - Lifetime
- 2002-08-08 US US10/214,662 patent/US6647892B2/en not_active Expired - Fee Related
- 2002-08-19 JP JP2002238315A patent/JP4057373B2/ja not_active Expired - Fee Related
- 2002-08-22 RU RU2002122434/11A patent/RU2228987C2/ru not_active IP Right Cessation
- 2002-08-22 PL PL355616A patent/PL205070B1/pl unknown
- 2002-08-23 CA CA002399596A patent/CA2399596C/en not_active Expired - Fee Related
- 2002-08-23 CN CNB021301506A patent/CN1206410C/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| ATA13492001A (de) | 2003-04-15 |
| EP1288372B1 (de) | 2005-07-20 |
| JP4057373B2 (ja) | 2008-03-05 |
| CA2399596A1 (en) | 2003-02-24 |
| JP2003113601A (ja) | 2003-04-18 |
| PL205070B1 (pl) | 2010-03-31 |
| AT411276B (de) | 2003-11-25 |
| EP1288372A3 (de) | 2003-12-10 |
| EP1288372A2 (de) | 2003-03-05 |
| US20030037694A1 (en) | 2003-02-27 |
| CA2399596C (en) | 2006-02-14 |
| CN1401851A (zh) | 2003-03-12 |
| US6647892B2 (en) | 2003-11-18 |
| PL355616A1 (en) | 2003-03-10 |
| RU2002122434A (ru) | 2004-03-10 |
| ATE299968T1 (de) | 2005-08-15 |
| RU2228987C2 (ru) | 2004-05-20 |
| ES2243687T3 (es) | 2005-12-01 |
| DE50203664D1 (de) | 2005-08-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1206410C (zh) | 整治轨道用机械 | |
| JP3188562B2 (ja) | 道床突き固め機械 | |
| US5205218A (en) | Tamping machine and method for consolidating the ballast of a track | |
| CN108035248B (zh) | 一种无人化桥梁检测与维修装置 | |
| JPH0610302A (ja) | 2本枕木つき固め装置を備えたタイタンパ | |
| CA1316761C (en) | Mobile machine for leveling, lining and tamping a track switch | |
| US4893565A (en) | Mobile track switch working machine | |
| JP3834116B2 (ja) | 道床突固め機 | |
| CN1100922C (zh) | 拆除旧轨道及铺设新轨道用的机械 | |
| CN1215227C (zh) | 带有机架和作业机组架的捣固车 | |
| CN110499681B (zh) | 自动式分枕设备 | |
| CN1031006C (zh) | 轨道捣固机 | |
| CN105442398A (zh) | 一种适合狭窄作业面的道砟处理机 | |
| CA1237946A (en) | Combined switch and production clamp | |
| CN204000502U (zh) | 一种适合狭窄作业面的道砟处理机 | |
| CN117280094A (zh) | 用于夯实的轨道的碎石道床的捣固机械 | |
| EP0786556B1 (en) | Self-propelled machine for stabilizing by hammering and compacting, tracks laid on ballast | |
| CN105350410A (zh) | 一种轨排提升装置 | |
| CA2399660C (en) | A machine for treating a track bed | |
| RU1799409C (ru) | Подвижна шпалоподбивочна подъемна и рихтовочна машина | |
| RU206133U1 (ru) | Рельсоподъемная тележка для смены скреплений | |
| SU1748655A3 (ru) | Шпалоподбивочна машина | |
| RU2261301C1 (ru) | Выправочно-подбивочная машина | |
| CN213114134U (zh) | 一种用于挖掘装置的测量控制装置的检测小车 | |
| JP2024528197A (ja) | 路盤においてバラストを圧縮する方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20050615 Termination date: 20190823 |