CN111977347A - Logistics package conveying device with detection function - Google Patents
Logistics package conveying device with detection function Download PDFInfo
- Publication number
- CN111977347A CN111977347A CN202010852929.2A CN202010852929A CN111977347A CN 111977347 A CN111977347 A CN 111977347A CN 202010852929 A CN202010852929 A CN 202010852929A CN 111977347 A CN111977347 A CN 111977347A
- Authority
- CN
- China
- Prior art keywords
- fixedly connected
- belt conveyor
- gear
- support
- shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/52—Devices for transferring articles or materials between conveyors i.e. discharging or feeding devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G43/00—Control devices, e.g. for safety, warning or fault-correcting
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/22—Devices influencing the relative position or the attitude of articles during transit by conveyors
- B65G47/24—Devices influencing the relative position or the attitude of articles during transit by conveyors orientating the articles
- B65G47/248—Devices influencing the relative position or the attitude of articles during transit by conveyors orientating the articles by turning over or inverting them
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Control Of Conveyors (AREA)
- Specific Conveyance Elements (AREA)
Abstract
The invention discloses a logistics parcel conveying device with a detection function, which comprises a belt conveyor C, wherein a plurality of belt conveyors A are sequentially arranged in front of the belt conveyor C, a parcel is conveyed on each belt conveyor A, a detection device is arranged above each belt conveyor A, the detection device detects the damage condition of the parcel surface, a belt conveyor B is arranged on the left side of each belt conveyor A, a manipulator is arranged on the right side of each belt conveyor A, a clamping mechanism is arranged at the end part of the manipulator, the manipulator and the clamping mechanism are used for turning the parcel, and a conveying device is also arranged above each belt conveyor A; the invention aims to solve the technical problems of easy missed detection, low efficiency, large manual labor amount and the like caused by loss or damage of logistics pieces due to damage of logistics packages and manual visual inspection of the surfaces of the logistics packages at present.
Description
The invention relates to a logistics package conveying device with a detection function and a working method thereof, which is a divisional application of an invention patent with an application number of 2020102221485.
Technical Field
The invention belongs to the field of conveying devices, and particularly relates to a logistics package conveying device with a detection function.
Background
The important role of modern logistics in regional economic development is more and more known to people, and the modern logistics are put into an important agenda by a city. The logistics modernization and economic development are closely related, and the Chinese economy is expected to keep steady and rapid growth in the future for a quite long period of time, and the trend of the world economy in track is also enhanced, which is a large environment for the logistics business development.
Present commodity circulation parcel often can appear packing damaged problem in the transportation, lead to commodity circulation piece to lose or impaired, from leading to the fact the harm to logistics system, and the damaged reason of parcel, generally because the sticky tape is sealed incompletely, or the extranal packing has the leak, the crack leads to, the method of solving this problem at present, generally carry out visual inspection by the manual work, nevertheless because the parcel is numerous, the damaged parcel of easy hourglass is examined to the manual work, and inefficiency, need consume a large amount of manpowers, in addition, because some parcel weight are great, be not convenient for turn-over, consequently also bring the difficulty for the manual visual inspection.
Disclosure of Invention
The technical problem to be solved by the invention is as follows: the utility model provides a commodity circulation parcel conveyor with detect function to solve present because the commodity circulation piece that the commodity circulation parcel damage leads to loses or is impaired, and the manual work carries out the easy hourglass that visual inspection leads to on commodity circulation parcel surface and examines, technical problem such as inefficiency, the hand labor volume is big.
The specific technical scheme of the invention is as follows:
the utility model provides a commodity circulation parcel conveyor with detect function which characterized in that: including belt feeder C, belt feeder C's the place ahead has set gradually a plurality of belt feeder A, each the last conveying of belt feeder A has the parcel, each belt feeder A top all is provided with detection device, detection device detects the damaged condition on parcel surface, each belt feeder A's left side all is provided with belt feeder B, each belt feeder A's right side all is provided with the manipulator, the mechanism is got to the tip installation of manipulator, the manipulator is used for carrying out the turn-over to the parcel with getting the mechanism, each belt feeder A's top still installs handling device.
Preferably, the carrying device comprises a support A, a cross beam is fixedly connected above the support A, the cross beam stretches over the belt conveyor A, one end of the cross beam, which is close to the belt conveyor B, extends to the upper part of the belt conveyor B, a rack is connected to the cross beam in a sliding manner, a gear is meshed and connected above the rack, supports are respectively arranged on the front side and the rear side of the gear, the supports are fixedly connected with the cross beam, the gear is rotatably connected with the supports, a motor A is further connected to the center of the gear, a mounting plate A is fixedly connected to the rack, a cylinder A is fixedly connected to the mounting plate A, a mounting plate B is fixedly connected to the output end of the cylinder A, a guide rod A is fixedly connected to the mounting plate B, the guide rod A penetrates through the mounting plate A and is slidably connected with the mounting plate, the extension plate is fixedly connected with a cylinder B, the output end of the cylinder B is fixedly connected with a clamping block, the clamping block is fixedly connected with a guide rod B, and the guide rod B penetrates through the extension plate and is in sliding connection with the extension plate.
Preferably, the detection device comprises a support B, the support B is fixedly connected above the belt conveyor A, and a vision sensor is installed on the belt conveyor A.
Preferably, belt feeder A includes support C, it is connected with driving shaft and driven shaft to rotate on the support C, the driving shaft is parallel to each other with the driven shaft, equal fixedly connected with band pulley on driving shaft and the driven shaft is connected with the belt between two band pulleys, still fixedly connected with backup pad on the support C, the backup pad is located the upper surface below of belt, still install the sensor on the support C.
Preferably, a regulating mechanism is connected between the belt conveyors A and is used for controlling the operation of each belt conveyor A.
Preferably, the regulating and controlling mechanism comprises a motor B, the motor B is fixedly connected to the front side of the support C, an output shaft of the motor B is fixedly connected with a transmission shaft, the transmission shaft is arranged along the conveying direction of each belt conveyor A, two ends of the transmission shaft are respectively in rotating connection with the front side and the rear side of the support C, a plurality of starting mechanisms are further mounted on the transmission shaft, the number of the starting mechanisms is the same as that of the belt conveyors A, each starting mechanism is respectively connected with each driving shaft, and the starting mechanisms control the operation of each driving shaft.
Preferably, the starting mechanism comprises a central wheel, the central wheel is fixedly connected to a transmission shaft, the central wheel is connected with a plurality of planet wheels in a meshing manner, the outer side of each planet wheel is connected with a gear ring in a meshing manner, inner teeth and outer teeth are machined on the gear ring, the planet wheels are meshed with the inner teeth of the gear ring, the center of each planet wheel is connected with a planet carrier, each planet wheel is rotatably connected with the planet carrier, a connecting piece is fixedly connected below the planet carrier, a gear A is fixedly connected below the connecting piece, the gear A is connected with a gear B in a meshing manner, the center of the gear B is fixedly connected with a rotating shaft, the rotating shaft is rotatably connected with a support C, the rotating shaft is also fixedly connected with a bevel gear A, the bevel gear A is connected with a bevel gear B in a meshing manner, the support C is further fixedly connected with a support frame A and a support frame B, the support frame A is fixedly connected with a rotary table A, the rotary table A is connected with the gear ring in a rotating mode, the support frame B is fixedly connected with a rotary table B, the rotary table B is connected with the gear A in a rotating mode, the support frame A is fixedly connected with an installation shaft A, the installation shaft A is connected with a brake wheel A in a rotating mode, the brake wheel A is further provided with an electromagnetic brake A, the electromagnetic brake A is sleeved on the installation shaft A, the support frame B is fixedly connected with an installation shaft B, the installation shaft B is connected with a brake wheel B in a rotating mode, the brake wheel B is further provided with an electromagnetic brake B, and the electromagnetic brake B is sleeved on the installation shaft B.
Preferably, the vision sensor further comprises a controller, the controller is a PLC control unit, the control circuit is respectively and electrically connected with the motor A, the motor B, the manipulator, the clamping mechanism, the electromagnetic brake A, the electromagnetic brake B, the sensor, the cylinder A and the cylinder B, the controller is further electrically connected with a central processing unit, and the central processing unit is electrically connected with the vision sensor.
A method for using the logistics package conveying device with detection function as described above, characterized in that the method comprises the following steps:
A. placing the parcels on a belt conveyor C, feeding the parcels, and driving the parcels to move forwards by the belt conveyor C;
B. the controller sends a signal to the motor B to start the motor B, and simultaneously sends a signal to each electromagnetic brake A and each electromagnetic brake B to enable each electromagnetic brake A to be electrified, each electromagnetic brake B is electrified, the motor B drives each center wheel to rotate through a transmission shaft, the electromagnetic brakes A are electrified at the moment, the electromagnetic brakes A apply braking force to the brake wheels A connected with the electromagnetic brakes A, the brake wheels A and the gear rings are fixed, the electromagnetic brakes B are electrified at the same time, the electromagnetic brakes B do not apply braking force to the brake wheels B connected with the electromagnetic brakes B, the center wheels drive the planetary wheels connected with the center wheels to rotate around the center wheels, so that the planetary carriers, the connecting pieces, the gears A, the gears B, the rotating shafts and the driving shafts are driven to rotate, each belt conveyor A starts to run, and packages are conveyed to the belt conveyor A from the belt conveyor C;
C. when a sensor arranged on the belt conveyor A detects a package, a controller sends signals to an electromagnetic brake A and an electromagnetic brake B which are connected with the belt conveyor A, so that the electromagnetic brake A loses power, the electromagnetic brake B gets power, a motor B drives each center wheel to rotate through a transmission shaft, at the moment, the electromagnetic brake A loses power, the electromagnetic brake A does not apply braking force to the brake wheel A connected with the electromagnetic brake A, the center wheel connected with the belt conveyor A drives a gear ring to idle through a planet wheel, meanwhile, the electromagnetic brake B gets power, the electromagnetic brake B applies braking force to the brake wheel B connected with the electromagnetic brake B, and the brake wheel B, the gear A connected with the brake wheel B, a connecting piece and a planet carrier are fixed, so that the belt conveyor A connected with the brake B stops running;
D. the visual sensor above the belt conveyor A is used for visually detecting the upper surface of the package, detecting whether the upper surface of the package is damaged or not and whether the adhesive tape completely covers the opening of the package or not, and feeding a detection result back to the central processing unit, and the central processing unit feeds corresponding information back to the controller;
E. if the upper surface of the package is damaged or the package of the adhesive tape is incomplete, the controller sends a signal to the cylinder A above the belt conveyor A, the extending end of the cylinder A extends out to enable the mounting plate B to move downwards, when the mounting plate B descends, the controller sends a signal to the cylinder B above the belt conveyor A, the extending ends of the cylinders B on two sides extend out to drive the clamping block to clamp the package, then the extending end of the cylinder A retracts to lift the package from the belt conveyor A, the controller sends a signal to the motor A, the motor A drives the gear to rotate, the gear drives the rack to slide towards the left side, the conveying device conveys the package to the upper side of the belt conveyor B and then stops, the extending end of the cylinder A extends out to enable the mounting plate B to move downwards, when the mounting plate B descends, the extending ends of the cylinders B on two sides retract to place the package on the belt conveyor B, and the belt conveyor B conveys the package, repackaging;
F. if the upper surface of the package has no defect, the controller sends a signal to an electromagnetic brake A and an electromagnetic brake B which are connected with the belt conveyor A, so that the electromagnetic brake A is electrified, the electromagnetic brake B is not electrified, the belt conveyor A recovers to run, and the package is conveyed to the next belt conveyor A;
G. c, repeating the step C;
H. the controller sends signals to the manipulator and the clamping mechanism on the right side of the belt conveyor A, the manipulator drives the clamping mechanism to move to a parcel position, the clamping mechanism clamps the parcel from the belt conveyor A, the manipulator turns over the parcel, and then the parcel is placed back on the belt conveyor A;
I. and D, repeating the steps D to F until all surfaces of the piece of package are detected.
The technical scheme of the invention at least has the following beneficial effects:
1. the invention comprises the technical scheme that a plurality of belt conveyors A are sequentially arranged in front of a belt conveyor C, each belt conveyor A is conveyed with a package, a detection device is arranged above each belt conveyor A and is used for detecting the damage condition of the package surface, a belt conveyor B is arranged on the left side of each belt conveyor A, and a carrying device is also arranged above each belt conveyor A, the detection device is used for detecting the damage condition of the package surface, and the carrying device and the belt conveyor B are used for moving out the package with the damaged surface for repackaging according to the detection result, so that the automatic detection of the package surface is realized, the problems that the logistics pieces are lost or damaged due to the damage of the logistics package at present and the omission is easily caused by manual visual inspection of the logistics package surface are solved, the efficiency is low, the cost is low, and the cost is low, The labor intensity is large and the like.
2. The invention comprises the technical scheme that the right side of each belt conveyor A is provided with a manipulator, the end part of each manipulator is provided with a clamping mechanism, and the manipulators and the clamping mechanisms are used for turning the packages.
3. The invention comprises the technical scheme that a regulating mechanism is connected between the belt conveyors A and comprises a motor B, an output shaft of the motor B is fixedly connected with a transmission shaft, the transmission shaft is arranged along the conveying direction of the belt conveyors A, the front side and the rear side of a support C are rotatably connected at the two ends of the transmission shaft, a plurality of starting mechanisms are further arranged on the transmission shaft, each starting mechanism is respectively connected with each driving shaft, and the starting mechanisms control the operation of each driving shaft.
Drawings
FIG. 1 is a top view of the overall structure of the present invention;
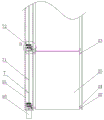
FIG. 2 is a sectional view taken along line A-A of FIG. 1;
FIG. 3 is an enlarged view of a portion B of FIG. 1;
FIG. 4 is an enlarged view of a portion C of FIG. 2;
FIG. 5 is a top cross-sectional view of the adjustment mechanism;
FIG. 6 is an enlarged view of a portion D of FIG. 5;
FIG. 7 is a schematic view of FIG. 6 taken along line E;
FIG. 8 is a control block diagram of the present invention;
in the figure: 1. wrapping; 2. a belt conveyor A; 21. a support C; 22. a drive shaft; 23. a driven shaft; 24. a pulley; 25. a belt; 26. a sensor; 3. a detection device; 31. a bracket B; 32. a vision sensor; 4. a carrying device; 41. a bracket A; 42. a cross beam; 43. a rack; 44. a gear; 45. a motor A; 46. mounting a plate A; 47. a cylinder A; 48. a guide rod A; 49. mounting a plate B; 50. extending the plate; 51. a cylinder B; 52. a guide rod B; 53. a clamping block; 54. a support; 6. a belt conveyor B; 7. a regulating mechanism; 71. a drive shaft; 72. a starting mechanism; 73. a center wheel; 74. a planet wheel; 75. a planet carrier; 76. a connecting member; 77. a gear A; 78. a gear B; 79. a rotating shaft; 80. a bevel gear A; 81. a bevel gear B; 82. a support frame A; 83. a turntable A; 85. a support frame B; 86. a turntable B; 88. installing a shaft A; 89. a brake wheel A; 90. an electromagnetic brake A; 91. installing a shaft B; 92. a brake wheel B; 93. an electromagnetic brake B; 94. a ring gear; 95. a motor B; 10. a manipulator; 11. a gripping mechanism; 12. and (7) a belt conveyor C.
Detailed Description
The technical scheme of the invention provides a logistics package conveying device with a detection function and a working method thereof, and the technical scheme of the invention is described in detail by combining the accompanying drawings and an embodiment:
the invention discloses a logistics package conveying device with a detection function, which comprises a belt conveyor C12, wherein a plurality of belt conveyors A2 are sequentially arranged in front of a belt conveyor C12, packages 1 are conveyed on the belt conveyors A2, a detection device 3 is arranged above each belt conveyor A2, the detection device 3 detects the damage condition of the surface of each package 1, a belt conveyor B6 is arranged on the left side of each belt conveyor A2, a manipulator 10 is arranged on the right side of each belt conveyor A2, the manipulator 10 is a four-axis or six-axis robot, a clamping mechanism 11 is arranged at the end part of the manipulator 10, the manipulator 10 and the clamping mechanism 11 are used for turning over the packages 1, and a conveying device 4 is arranged above each belt conveyor A2, as shown in figures 1 and 2.
Belt feeder A2 includes support C21, it is connected with driving shaft 22 and driven shaft 23 to rotate on the support C21, driving shaft 22 is parallel to each other with driven shaft 23, equal fixedly connected with band pulley 24 on driving shaft 22 and the driven shaft 23 is connected with belt 25 between two band pulleys 24, the last fixedly connected with backup pad that goes back of support C21, the backup pad is located the upper surface below of belt 25, still install sensor 26 on the support C21.
A regulating mechanism 7 is further connected between the belt conveyors A2, and the regulating mechanism 7 is used for controlling the operation of each belt conveyor A2.
The adjusting and controlling mechanism 7 is as shown in fig. 5, 6 and 7, and includes a motor B95, the motor B95 is fixedly connected to the front side of the support C21, an output shaft of the motor B95 is fixedly connected with a transmission shaft 71, the transmission shaft 71 is arranged along the conveying direction of each belt conveyor a2, two ends of the transmission shaft 71 are respectively rotatably connected with the front side and the rear side of the support C21, the transmission shaft 71 is further provided with a plurality of starting mechanisms 72, the number of the starting mechanisms 72 is the same as that of the belt conveyors a2, each starting mechanism 72 is respectively connected with each driving shaft 22, and the starting mechanisms 72 control the operation of each driving shaft 22.
The starting mechanism 72 comprises a central wheel 73, the central wheel 73 is fixedly connected to a transmission shaft 71, the central wheel 73 is connected with a plurality of planet wheels 74 in a meshing manner, the outer side of each planet wheel 74 is connected with a gear ring 94 in a meshing manner, the gear ring 94 is provided with inner teeth and outer teeth, the planet wheels 74 are meshed with the inner teeth of the gear ring 94, the center of each planet wheel 74 is connected with a planet carrier 75, each planet wheel 74 is rotatably connected with the planet carrier 75, a connecting piece 76 is fixedly connected below the planet carrier 75, a gear A77 is fixedly connected below the connecting piece 76, a gear A77 is connected with a gear 78 in a meshing manner, a rotating shaft 79 is fixedly connected at the center of the gear B78, the rotating shaft 79 is rotatably connected with the bracket C21, the rotating shaft 79 is further fixedly connected with a bevel gear A80, the bevel gear A80 is connected with a bevel gear B81 in a meshing manner, and the, the support C21 is further fixedly connected with a support frame A82 and a support frame B85, the support frame A82 is fixedly connected with a rotary table A83, the rotary table A83 is rotatably connected with the gear ring 94, the support frame B85 is fixedly connected with a rotary table B86, the rotary table B86 is rotatably connected with the gear A77, the support frame A82 is fixedly connected with a mounting shaft A88, the mounting shaft A88 is rotatably connected with a brake wheel A89, the brake wheel A89 is further provided with an electromagnetic brake A90, the electromagnetic brake A90 is sleeved on the mounting shaft A88, the support frame B85 is fixedly connected with a mounting shaft B91, the mounting shaft B91 is rotatably connected with a brake wheel B92, the brake wheel B92 is further provided with an electromagnetic brake B93, and the electromagnetic brake B93 is sleeved on the mounting shaft B91.
The invention further comprises a controller, as shown in fig. 8, the controller is a PLC control unit, the control circuit is electrically connected with the motor a45, the motor B95, the manipulator 10, the gripping mechanism 11, the electromagnetic brake a90, the electromagnetic brake B93, the sensor 26, the air cylinder a47 and the air cylinder B51, the controller is further electrically connected with a central processing unit, and the central processing unit is electrically connected with the vision sensor 32.
When in use, the action process of the embodiment of the invention is as follows:
and (3) placing the parcel 1 on a belt conveyor C12, feeding the parcel 1, and driving the parcel 1 to move forwards by the belt conveyor C12.
The controller sends a signal to the motor B95 to enable the motor B95 to be started, and simultaneously sends a signal to each electromagnetic brake A90 and each electromagnetic brake B93 to enable each electromagnetic brake A90 to be electrified, each electromagnetic brake B93 is not electrified, the motor B95 drives each center wheel 73 to rotate through the transmission shaft 71, at the moment, the electromagnetic brake A90 is electrified, the electromagnetic brake A90 applies braking force to the brake wheel A89 connected with the electromagnetic brake A90, the brake wheel A89 and the gear ring 94 are fixed, at the same time, the electromagnetic brake B93 is not electrified, the electromagnetic brake B93 does not apply braking force to the brake wheel B92 connected with the electromagnetic brake A3626, the center wheel 73 drives the planet wheel 74 connected with the electromagnetic brake A74 to rotate around the center wheel, so as to drive the planet carrier 75, the connecting piece 76, the gear A77, the gear B78, the rotating shaft 79 and the driving shaft 22 to rotate, so that each belt conveyor A2 starts to run, and the parcel 1 is conveyed.
When a sensor 26 mounted on the belt conveyor a2 detects a package 1, a controller sends a signal to an electromagnetic brake a90 and an electromagnetic brake B93 connected with the belt conveyor a2, so that the electromagnetic brake a90 is de-energized, the electromagnetic brake B93 is energized, a motor B95 drives each center wheel 73 to rotate through a transmission shaft 71, at the moment, the electromagnetic brake a90 is de-energized, the electromagnetic brake a90 does not apply braking force to a brake wheel a89 connected with the electromagnetic brake a90, the center wheel 73 connected with the belt conveyor a2 drives a gear ring 94 to idle through a planet wheel 74, meanwhile, the electromagnetic brake B93 is energized, the electromagnetic brake B93 applies braking force to a brake wheel B92 connected with the electromagnetic brake B3583, and the brake wheel B77, the connecting piece 76 and the planet carrier 75 connected with the electromagnetic brake B92 are fixed, so that the belt conveyor a2 connected with the electromagnetic brake B93 stops running.
The vision sensor 32 above the belt conveyor A2 is used for carrying out vision detection on the upper surface of the parcel 1, detecting whether the upper surface of the parcel 1 is damaged, loophole or crack or not, and whether the adhesive tape completely covers the opening of the parcel or not, and feeding back the detection result to the central processing unit, and the central processing unit feeds back corresponding information to the controller.
If the upper surface of the parcel 1 is damaged or the adhesive tape is not completely packaged, the controller sends a signal to the cylinder A47 above the belt conveyor A2, the extending end of the cylinder A47 extends out to enable the mounting plate B49 to move downwards, after the mounting plate B49 descends, the controller sends a signal to the cylinder B51 above the belt conveyor A2, the extending ends of the cylinders B51 at two sides extend out to drive the clamping block 53 to clamp the parcel 1, then the extending end of the cylinder A47 retracts to lift the parcel 1 from the belt conveyor A2, the controller sends a signal to the motor A45, the motor A45 drives the gear 44 to rotate, the gear 44 drives the rack 43 to slide to the left side, the carrying device 4 conveys the parcel 1 to the belt conveyor B6 and then stops, the extending end of the cylinder A38 extends out to enable the mounting plate B49 to move downwards, after the mounting plate B49 descends, the extending ends of the cylinders B51 at two sides retract to place the parcel 1 on the belt conveyor B6, belt conveyor B6 transports package 1 away for repackaging.
If no defect exists on the upper surface of the parcel 1, the controller sends signals to an electromagnetic brake A90 and an electromagnetic brake B93 which are connected with the belt conveyor A2, so that the electromagnetic brake A90 is electrified, the electromagnetic brake B93 is not electrified, the belt conveyor A2 resumes running, and the parcel 1 is conveyed to the next belt conveyor A2.
When a sensor 26 mounted on the next belt conveyor a2 detects a package 1, the controller sends a signal to an electromagnetic brake a90 and an electromagnetic brake B93 connected with the belt conveyor a2, so that the electromagnetic brake a90 is de-energized, the electromagnetic brake B93 is energized, a motor B95 drives each center wheel 73 to rotate through a transmission shaft 71, at the moment, the electromagnetic brake a90 is de-energized, the electromagnetic brake a90 does not apply a braking force to a brake wheel a89 connected with the electromagnetic brake a90, the center wheel 73 connected with the belt conveyor a2 drives a gear ring 94 to idle through a planet wheel 74, meanwhile, the electromagnetic brake B93 is energized, the electromagnetic brake B93 applies a braking force to a brake wheel B92 connected with the electromagnetic brake a, and the brake B92 is fixed with a gear a77, a connecting piece 76 and a planet carrier 75 connected with the electromagnetic brake B, so that the belt conveyor a2 connected with the electromagnetic brake B93 stops running.
The controller sends signals to the manipulator 10 and the clamping mechanism 11 on the right side of the belt conveyor A2, the manipulator 10 drives the clamping mechanism 11 to move to the parcel 1, the clamping mechanism 11 clamps the parcel 1 from the belt conveyor A2, the manipulator 10 turns over the parcel 1, and then the parcel 1 is placed back on the belt conveyor A2.
The above detection steps are repeated until all the surfaces of the piece of parcel 1 have been detected.
The words of front, back, left, right, up and down, etc. in the present invention are only for convenience of describing the structure and do not form a limitation on the technical solution. While preferred embodiments of the present invention have been described, additional variations and modifications in those embodiments may occur to those skilled in the art once they learn of the basic inventive concepts. Therefore, it is intended that the appended claims be interpreted as including preferred embodiments and all such alterations and modifications as fall within the scope of the invention.
It will be apparent to those skilled in the art that various changes and modifications may be made in the present invention without departing from the spirit and scope of the invention. Thus, if such modifications and variations of the present invention fall within the scope of the claims of the present invention and their equivalents, the present invention is also intended to include such modifications and variations.
Claims (2)
1. The utility model provides a commodity circulation parcel conveyor with detect function which characterized in that: the conveying device comprises a belt conveyor C (12), wherein a plurality of belt conveyors A (2) are sequentially arranged in front of the belt conveyor C (12), each belt conveyor A (2) is conveyed with a package (1), a detection device (3) is arranged above each belt conveyor A (2), the detection device (3) detects the damage condition of the surface of the package (1), a belt conveyor B (6) is arranged on the left side of each belt conveyor A (2), a manipulator (10) is arranged on the right side of each belt conveyor A (2), a clamping mechanism (11) is arranged at the end part of the manipulator (10), the manipulator (10) and the clamping mechanism (11) are used for turning over the package (1), and a conveying device (4) is also arranged above each belt conveyor A (2);
the belt conveyor A (2) comprises a support C (21), and a driving shaft (22) and a driven shaft (23) are rotatably connected to the support C (21); a regulating mechanism (7) is further connected between the belt conveyors A (2), and the regulating mechanism (7) is used for controlling the operation of each belt conveyor A (2); the adjusting and controlling mechanism (7) comprises a motor B (95), an output shaft of the motor B (95) is fixedly connected with a transmission shaft (71), the transmission shaft (71) is arranged along the conveying direction of each belt conveyor A (21), a plurality of starting mechanisms (72) are further installed on the transmission shaft (71), and the starting mechanisms (72) control the operation of each driving shaft (22);
the starting mechanism (72) comprises a central wheel (73), the central wheel (73) is fixedly connected to a transmission shaft (71), the central wheel (73) is connected with a plurality of planet wheels (74) in a meshed mode, the outer side of each planet wheel (74) is connected with a gear ring (94) in a meshed mode, inner teeth and outer teeth are machined on the gear ring (94), the planet wheels (74) are meshed with the inner teeth of the gear ring (94), the center of each planet wheel (74) is connected with a planet carrier (75), each planet wheel (74) is rotatably connected with the planet carrier (75), a connecting piece (76) is fixedly connected to the lower portion of the planet carrier (75), a gear A (77) is fixedly connected to the lower portion of the connecting piece (76), a gear B (78) is connected to the gear A (77) in a meshed mode, and a rotating shaft (79) is fixedly connected to the center of the gear, the rotating shaft (79) is rotatably connected with the support C (21), the rotating shaft (79) is further fixedly connected with a bevel gear A (80), the bevel gear A (80) is connected with a bevel gear B (81) in a meshed mode, the bevel gear B (81) is fixedly connected with the driving shaft (22), the support C (21) is further fixedly connected with a support frame A (82) and a support frame B (85), the support frame A (82) is fixedly connected with a rotary table A (83), the rotary table A (83) is rotatably connected with the gear ring (94), the support frame B (85) is fixedly connected with a rotary table B (86), the rotary table B (86) is rotatably connected with the gear A (77), the support frame A (82) is fixedly connected with an installation shaft A (88), the installation shaft A (88) is rotatably connected with a brake wheel A (89), and an electromagnetic brake A (90) is further installed on the brake wheel A (89), the electromagnetic brake A (90) is sleeved on the mounting shaft A (88), the support frame B (85) is fixedly connected with a mounting shaft B (91), the mounting shaft B (91) is rotatably connected with a brake wheel B (92), the brake wheel B (92) is further provided with an electromagnetic brake B (93), and the electromagnetic brake B (93) is sleeved on the mounting shaft B (91);
handling device (4) includes support A (41), support A (41) top fixedly connected with crossbeam (42), crossbeam (42) span in belt feeder A (2) top, and its one end that is close to belt feeder B (6) extends to the top of belt feeder B (6), sliding connection has rack (43) on crossbeam (42), rack (43) top meshing is connected with gear (44), both sides are provided with support (54) respectively around gear (44), support (54) and crossbeam (42) fixed connection, gear (44) and support (54) rotate and are connected, the center department of gear (44) still is connected with motor A (45), fixedly connected with mounting panel A (46) on rack (43), fixedly connected with cylinder A (47) on mounting panel A (46), the output fixedly connected with mounting panel B (49) of cylinder A (47), the guide rod A (48) is fixedly connected to the mounting plate B (49), the guide rod A (48) penetrates through the mounting plate A (46) and is in sliding connection with the mounting plate A (46), the two sides of the mounting plate B (49) are respectively and fixedly connected with the extension plates (50), the extension plates (50) are fixedly connected with the air cylinders B (51), the output ends of the air cylinders B (51) are fixedly connected with the clamping blocks (53), the clamping blocks (53) are fixedly connected with the guide rod B (52), and the guide rod B (52) penetrates through the extension plates (50) and is in sliding connection with the extension plates (50);
the detection device (3) comprises a support B (31), the support B (31) is fixedly connected above the belt conveyor A (21), and a vision sensor (32) is installed on the belt conveyor A (2);
the motor B (95) is fixedly connected to the front side of the support C (21), two ends of the transmission shaft (71) are respectively in rotating connection with the front side and the rear side of the support C (21), the number of the starting mechanisms (72) is the same as that of the belt conveyor A (2), and each starting mechanism (72) is respectively connected with each driving shaft (22).
2. The logistics package delivery apparatus with detection function of claim 1, wherein: still include the controller, the controller is PLC the control unit, control circuit respectively with motor A (45), motor B (95), manipulator (10), press from both sides and get mechanism (11), electromagnetic braking ware A (90), electromagnetic braking ware B (93), sensor (26), cylinder A (47), cylinder B (51) electricity and be connected, the controller still electricity is connected with central processing unit, central processing unit with vision sensor (32) electricity is connected.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010852929.2A CN111977347A (en) | 2020-03-26 | 2020-03-26 | Logistics package conveying device with detection function |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010852929.2A CN111977347A (en) | 2020-03-26 | 2020-03-26 | Logistics package conveying device with detection function |
| CN202010222148.5A CN111115194B (en) | 2020-03-26 | 2020-03-26 | Logistics package conveying device with detection function and working method thereof |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010222148.5A Division CN111115194B (en) | 2020-03-26 | 2020-03-26 | Logistics package conveying device with detection function and working method thereof |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN111977347A true CN111977347A (en) | 2020-11-24 |
Family
ID=70493880
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010222148.5A Active CN111115194B (en) | 2020-03-26 | 2020-03-26 | Logistics package conveying device with detection function and working method thereof |
| CN202010852929.2A Pending CN111977347A (en) | 2020-03-26 | 2020-03-26 | Logistics package conveying device with detection function |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010222148.5A Active CN111115194B (en) | 2020-03-26 | 2020-03-26 | Logistics package conveying device with detection function and working method thereof |
Country Status (1)
| Country | Link |
|---|---|
| CN (2) | CN111115194B (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113526088A (en) * | 2021-01-27 | 2021-10-22 | 哈尔滨商业大学 | Logistics package conveying device with detection function and comprising pressing cylinder |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112079078B (en) * | 2020-11-16 | 2021-04-30 | 山东海德智能科技有限公司 | Full-automatic unordered feeding system of robot based on binocular vision |
| CN115366158A (en) * | 2022-10-24 | 2022-11-22 | 四川易华智源科技有限公司 | Manipulator based on image recognition technology and control method |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102232222A (en) * | 2008-09-30 | 2011-11-02 | 亚马逊技术股份有限公司 | Systems and methods for receiving shipment parcels |
| US20160001991A1 (en) * | 2007-05-23 | 2016-01-07 | Wynright Corporation | System and Method for Automated Truck Loading |
| CN109239100A (en) * | 2018-10-24 | 2019-01-18 | 东莞市乐琪光电科技有限公司 | Lithium battery surface inspection apparatus |
| CN208790684U (en) * | 2018-09-12 | 2019-04-26 | 深圳市鸿达利机械设备有限公司 | A kind of operation is convenient and fast to hold transfer machine |
| CN110255222A (en) * | 2019-07-03 | 2019-09-20 | 广东宾莱智能科技有限公司 | A kind of intelligence cargo loading system and method for loading |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2520228B2 (en) * | 1994-10-31 | 1996-07-31 | 株式会社日本システムアカデミー | Product sorting device |
| CN202864416U (en) * | 2012-10-12 | 2013-04-10 | 由田新技股份有限公司 | Checkout equipment with turnover device |
| CN203127717U (en) * | 2012-12-31 | 2013-08-14 | 东莞市伟创东洋自动化设备有限公司 | 90-degree turning-over and transferring mechanism |
| CN204872782U (en) * | 2015-06-30 | 2015-12-16 | 伯曼机械制造(上海)有限公司 | Prevent that parcel is damaged and guarantee smooth running device of parcel |
| US9617074B2 (en) * | 2015-09-08 | 2017-04-11 | Carefusion Germany 326 Gmbh | Method and picking device for storing a plurality of identical piece goods |
| CN105293064A (en) * | 2015-12-04 | 2016-02-03 | 邢台职业技术学院 | Electrical automation packing defect detection device |
| CN105712064B (en) * | 2016-04-06 | 2018-06-01 | 格力电器(武汉)有限公司 | Remote controller automatic feeding system and have visual detection equipment of this system |
| JP6679442B2 (en) * | 2016-07-29 | 2020-04-15 | パナソニックi−PROセンシングソリューションズ株式会社 | Package tracking system, package tracking method and package tracking program |
| CN207216000U (en) * | 2017-08-26 | 2018-04-10 | 江苏爱可信电气有限公司 | Signal lamp automatic checkout equipment |
| CN110299151A (en) * | 2019-05-20 | 2019-10-01 | 菜鸟智能物流控股有限公司 | Detection method, detection model generation method and device |
-
2020
- 2020-03-26 CN CN202010222148.5A patent/CN111115194B/en active Active
- 2020-03-26 CN CN202010852929.2A patent/CN111977347A/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160001991A1 (en) * | 2007-05-23 | 2016-01-07 | Wynright Corporation | System and Method for Automated Truck Loading |
| CN102232222A (en) * | 2008-09-30 | 2011-11-02 | 亚马逊技术股份有限公司 | Systems and methods for receiving shipment parcels |
| CN208790684U (en) * | 2018-09-12 | 2019-04-26 | 深圳市鸿达利机械设备有限公司 | A kind of operation is convenient and fast to hold transfer machine |
| CN109239100A (en) * | 2018-10-24 | 2019-01-18 | 东莞市乐琪光电科技有限公司 | Lithium battery surface inspection apparatus |
| CN110255222A (en) * | 2019-07-03 | 2019-09-20 | 广东宾莱智能科技有限公司 | A kind of intelligence cargo loading system and method for loading |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113526088A (en) * | 2021-01-27 | 2021-10-22 | 哈尔滨商业大学 | Logistics package conveying device with detection function and comprising pressing cylinder |
| CN113526088B (en) * | 2021-01-27 | 2022-06-24 | 哈尔滨商业大学 | Logistics package conveying device with detection function and comprising pressing cylinder |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111115194B (en) | 2020-09-18 |
| CN111115194A (en) | 2020-05-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111115194B (en) | Logistics package conveying device with detection function and working method thereof | |
| CN112678542B (en) | Chain-driven parallel distributed automatic unstacking robot with sucker grippers | |
| CN217200401U (en) | Automatic feeding and discharging device for production line | |
| CN208880714U (en) | A kind of automatic numerical control manipulator | |
| CN218423804U (en) | Five point gum machines in efficient duplex position of processing | |
| CN210437532U (en) | Stacking feeding device and stacking device formed by same | |
| CN214640546U (en) | Automatic shearing workstation of railway wagon door plate | |
| CN211253211U (en) | High-speed rectangular coordinate box filler | |
| CN112478823A (en) | Automatic loading system and loading method thereof | |
| CN205333574U (en) | Multistation ultrasonic testing device | |
| CN108790230B (en) | Automatic tread feeding device | |
| CN216401917U (en) | Automatic box filling machine | |
| CN208253236U (en) | Globular bulb mechanized production system | |
| CN216470114U (en) | Logistics storage equipment with planetary gear mechanism | |
| CN212291871U (en) | Transplanting device | |
| CN209553691U (en) | Full-automatic cartoning sealing machine joint sealing height automatic regulating apparatus | |
| CN209921656U (en) | Stack plate packaging device | |
| CN210690425U (en) | Pipe joint forging outward appearance detects and critical dimension measuring automation line | |
| CN210527697U (en) | Intelligent conveyor belt for machine manufacturing | |
| CN108790229B (en) | Automatic tread feeding system | |
| CN208662869U (en) | A kind of feeding device for allowing the robot to quickly grab stiffening ring | |
| CN112509944A (en) | Process terminal detection equipment | |
| CN218965437U (en) | Manipulator and automatic handling truss robot | |
| CN219751170U (en) | Product carrying module | |
| CN109625464A (en) | Full-automatic cartoning sealing machine joint sealing height automatic regulating apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20201124 |
|
| RJ01 | Rejection of invention patent application after publication |