CN110901778A - 一种能够自由切换履带和麦克纳姆轮的全地形底盘 - Google Patents
一种能够自由切换履带和麦克纳姆轮的全地形底盘 Download PDFInfo
- Publication number
- CN110901778A CN110901778A CN201911094187.5A CN201911094187A CN110901778A CN 110901778 A CN110901778 A CN 110901778A CN 201911094187 A CN201911094187 A CN 201911094187A CN 110901778 A CN110901778 A CN 110901778A
- Authority
- CN
- China
- Prior art keywords
- wheel
- track
- assembly
- wheat
- shock
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D55/00—Endless track vehicles
- B62D55/04—Endless track vehicles with tracks and alternative ground wheels, e.g. changeable from endless track vehicle into wheeled vehicle and vice versa
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D55/00—Endless track vehicles
- B62D55/08—Endless track units; Parts thereof
- B62D55/12—Arrangement, location, or adaptation of driving sprockets
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D55/00—Endless track vehicles
- B62D55/08—Endless track units; Parts thereof
- B62D55/14—Arrangement, location, or adaptation of rollers
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Vehicle Body Suspensions (AREA)
Abstract
本发明公开了一种能够自由切换履带和麦克纳姆轮的全地形底盘,涉及机器人设备领域;能够自由切换履带和麦克纳姆轮的全地形底盘包括:车体、麦轮机构、履带机构和切换机构;履带机构安装于车体的两侧,且履带机构能够独立控制底盘任意方向的行进;切换机构安装于车体底部,麦轮机构安装于切换机构上,且切换机构能够控制麦轮机构上升或下降;麦轮机构能够独立控制底盘任意方向的行进;本技术方案的能够自由切换履带和麦克纳姆轮的全地形底盘通过切换机构控制麦轮机构下降使履带机构脱离地面的设计,使底盘在麦克纳姆轮或履带行进的方式中自由切换,达到了适应所有地形的效果。
Description
技术领域
本发明涉及移动机器人设备领域,尤其涉及一种能够自由切换履带和麦克纳姆轮的全地形底盘。
背景技术
机器人替代人工的场合越来越多,而自行式机器人的移动主要是靠其移动底盘来移动整台的机器人,常见的移动底盘有有麦克纳姆轮底盘和履带式底盘。
如中国发明专利CN 108583711A所公开的一种底盘,涉及机械结构技术领域,以解决现有的底盘无法兼备较好地稳定性和灵活性的技术问题。本发明所述的底盘,主支撑架安装有驱动装置,驱动装置连接有中间驱动主轮组;主支撑架长度方向的中轴线处设有主销轴,后万向轮组通过后摆臂组与主销轴连接;后摆臂组的横向之间连接有后桥;主支撑架安装有前吊架,前吊架通过托盘与后摆臂组连接;主支撑架的前端通过前桥梁安装有前万向轮组;后桥的中心处与前桥梁的中心处之间设有摆动销轴;前万向轮组与托盘的前端、托盘的前端与中间驱动主轮组、中间驱动主轮组与托盘的后端、托盘的后端与后万向轮组,采用等间距设置。上述现有技术的底盘采用麦克纳姆轮行进,防滑和减震效果较差,无法适应坎坷地面行进的问题。
又如中国发明专利CN 108583711A所公开的橡胶履带底盘、橡胶履带底盘防脱轨装置及履带式车辆;橡胶履带底盘,包括机架和橡胶履带,机架上设有主动轮和支重轮,橡胶履带的内壁上设有用于与主动轮传动连接的内啮合齿,还包括设置在所述机架上的防脱轨装置,防脱轨装置具有用于与机架连接的机架连接结构和用于与所述橡胶履带沿橡胶履带宽度方向挡止配合的挡止结构,挡止结构的沿橡胶履带长度方向的长度尺寸大于相邻的两内啮合齿之间的间隔距离。但上述现有技术的履带式底盘的运行速度较慢,无法快速行进的问题。
发明内容
一、要解决的技术问题
本发明的目的是针对现有技术所存在的上述问题,特提供一种能够自由切换履带和麦克纳姆轮的全地形底盘,解决现有麦克纳姆轮底盘的无法在坎坷路面行进的问题,及履带式底盘无法快速行进的问题。
二、技术方案
为解决上述技术问题,本发明提供一种能够自由切换履带和麦克纳姆轮的全地形底盘,包括:车体、麦轮机构、履带机构和切换机构;
履带机构安装于车体的两侧,且履带机构能够独立控制底盘任意方向的行进;
切换机构安装于车体底部,麦轮机构安装于切换机构上,且切换机构能够控制麦轮机构上升或下降;
麦轮机构能够独立控制底盘任意方向的行进;
切换机构包括框体、电推杆、导轨和滑块;
麦轮机构机构安装于框体上;
电推杆的第一端与车体固定,第二端与框体固定,且电推杆能够向下推动框体;
导轨与滑块滑动配合,且导轨安装于框体上,滑块安装于车体上;
电推杆和导轨之间呈平行设置。
本技术方案的能够自由切换履带和麦克纳姆轮的全地形底盘通过切换机构控制麦轮机构下降使履带机构脱离地面的设计,使底盘在麦克纳姆轮或履带行进的方式中自由切换,达到了适应所有地形的效果。
其中,麦轮机构包括麦克纳姆轮、麦轮轴、麦轮轴承、麦轮电机架和麦轮电机;
麦克纳姆轮、麦轮轴、麦轮轴承、麦轮电机架和麦轮电机均同轴设置,麦轮轴承和麦轮电机架与框体固定;
麦轮轴贯穿麦克纳姆轮并与麦轮电机固定,麦轮轴承安装于麦轮轴两端;
麦轮电机与麦轮电机架固定,且麦轮电机前出轴与麦轮轴连接。
本技术方案的能够自由切换履带和麦克纳姆轮的全地形底盘通过麦克纳姆轮的设计,可以使底盘在平整的地面上快速行进,并且能够快速转换方向。
其中,履带机构包括履带、履带主动轮组件、履带防撞轮组件、履带减震轮组件、履带连接轴组件和履带连接板组件;
履带连接轴组件贯穿履带连接板组件并与车体固定;
履带主动轮组件安装于履带连接板组件的第二端,用于驱动履带机构;
履带防撞轮组件活动安装于履带连接板组件第一端,且履带防撞轮组件能够缓冲正面的撞击力;
履带减震轮组件活动安装于履带连接轴组件上,且履带减震轮组件能够在履带连接轴组件上转动,使履带减震轮组件相对于履带连接板组件做杠杆运动,缓冲因地面凹凸而产生的震动;
履带环绕于履带主动轮组件、履带防撞轮组件和履带减震轮组件,并在履带主动轮组件的驱动下环绕履带主动轮组件、履带防撞轮组件和履带减震轮组件旋转。
本技术方案的能够自由切换履带和麦克纳姆轮的全地形底盘通过履带的设计使底盘具有良好的防滑效果。通过履带减震轮组件使底盘具有良好的减震效果,通过履带防撞轮组件的设计,使底盘在撞击时具有良好的正面缓冲效果。
其中,履带主动轮组件包括履带主动轮安装板、履带主动轮传动件、履带主动轮电机和履带主动轮;
履带主动轮安装板第一端与履带连接板组件的第二端固定,履带主动轮活动安装于履带主动轮安装板第二端;
履带主动轮电机通过履带主动轮传动件与履带主动轮传动连接,并能驱动履带主动轮旋转。
其中,主动轮传动件为同步带轮组件,包括主动同步轮、传动同步轮、和同步带;
主动同步轮和传动同步轮之间的传动比为6:1。
本技术方案的能够自由切换履带和麦克纳姆轮的全地形底盘通过同步带轮的设计,可以使底盘在过载时起到物理过载保护,从而有效的防止其他零部件的损坏,并且通过减速比的设计,可以有效的提高电机的驱动扭矩。
其中,履带防撞轮组件包括第一防撞轮、第二防撞轮、防撞轮安装板和防撞轮缓冲器;
防撞轮安装板第一端设有两防撞轮安装块,且两防撞轮安装块的圆心连接线与防撞轮安装板主体中心线呈倾斜状;
第一防撞轮和第二防撞轮安装于两防撞轮安装块后第一防撞轮和第二防撞轮的外圆公切线与地面水平线呈60°夹角;
防撞轮安装板第二端与履带连接板组件第一端活动连接;
防撞轮安装板第二端向第一端的延伸方向上设有第一缓冲安装孔,履带连接板组件第一端向第二端的延伸方向上设有第二缓冲安装孔,防撞轮缓冲器的两端分别与第一缓冲安装孔和第二缓冲安装孔活动连接。
本技术方案的能够自由切换履带和麦克纳姆轮的全地形底盘通过倾斜设置两个防撞轮的设计,使底盘在撞击时能够使防撞轮安装板发生旋转从而分解撞击力,并且在防撞轮缓冲器的作用下进一步分解撞击力。
其中,履带减震轮组件包括第一减震轮组、第二减震轮组、减震缓冲器、第一减震活动板和第二减震活动板;
第一减震活动板和第二减震活动板均呈三角形,且三个角上分别设有减震轮组安装孔、减震缓冲器安装孔和减震活动板安装孔;
第一减震活动板和第二减震活动板对称设置,并通过各自的减震活动板安装孔活动套设在履带连接轴组件上;
减震缓冲器的两端分别与第一减震活动板和第二减震活动板各自的减震缓冲器安装孔活动连接,使第一减震活动板和第二减震活动板之间产生联动;
第一减震轮组活动安装于第一减震活动板的减震轮组安装孔上,并能在第一减震活动板做杠杆运动;
第二减震轮组活动安装于第二减震活动板的减震轮组安装孔上,并能在第二减震活动板上做杠杆运动。
本技术方案的能够自由切换履带和麦克纳姆轮的全地形底盘通过在两个减震活动板之间设置减震缓冲器的设计,使底盘在能够更好的分解行进中产生的震动。
其中,第一减震轮组和第二减震轮组均包括减震轮安装板、第一减震轮和第二减震轮;
第一减震轮和第二减震轮活动安装在减震轮安装板的两端。
本技术方案的能够自由切换履带和麦克纳姆轮的全地形底盘通过在每个减震轮组设置两个减震轮的设计,使底盘在行进过程中进一步减震效果。
其中,防撞轮缓冲器和减震缓冲器均为液压缓冲器。
本技术方案的能够自由切换履带和麦克纳姆轮的全地形底盘通过防撞轮缓冲器和减震缓冲器为液压缓冲器的设计,使减震器的使用寿命更长。
其中,履带的外圆上均布有与履带周长方向垂直的横条。
本技术方案的能够自由切换履带和麦克纳姆轮的全地形底盘通过在履带上设置与履带周长方向垂直的横条设计,使履带可以通过横条增加抓地力,并且能使底盘具有攀爬爬台阶的效果。
三、本发明的有益效果
与现有技术相比,本申请用于射击训练的全自动移动靶标具有如下有益效果:
(1)通过切换机构控制麦轮机构下降使履带机构脱离地面的设计,使底盘在麦克纳姆轮或履带行进的方式中自由切换,达到了适应所有地形的效果;
(2)通过履带的设计使底盘具有良好的防滑效果。通过履带减震轮组件使底盘具有良好的减震效果,通过履带防撞轮组件的设计,使底盘在撞击时具有良好的正面缓冲效果。
(3)通过麦克纳姆轮的设计,可以使底盘在平整的地面上快速行进,并且能够快速转换方向。
(4)通过同步带轮的设计,可以使底盘在过载时起到物理过载保护,从而有效的防止其他零部件的损坏,并且通过减速比的设计,可以有效的提高电机的驱动扭矩。
附图说明
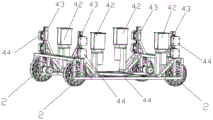
图1为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的整体结构示意图;
图2为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的车体与麦轮机构的示意图;
图3为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的麦轮机构与切换机构示意图;
图4为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的麦轮机构安装在框体上的示意图;
图5为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的框体示意图;
图6为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的麦轮机构示意图;
图7为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的麦轮机构爆炸图;
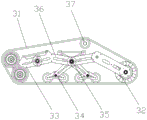
图8为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的履带机构示意图;
图9为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的履带主动轮组件安装在履带连接板组件上的示意图;
图10为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的履带主动轮组件爆炸图;
图11为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的履带主动轮传动件示意图;
图12为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的履带防撞轮组件安装在履带连接板组件上的示意图;
图13为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的履带防撞轮组件爆炸图;
图14为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的防撞轮安装板示意图;
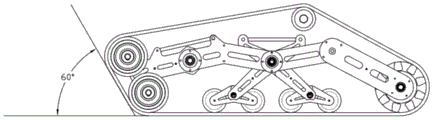
图15为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的第一防撞轮和第二防撞轮的外圆公切线与地面水平线呈60°夹角的示意图;
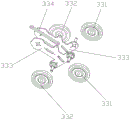
图16为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的履带减震轮组件安装在履带连接板组件上的示意图;
图17为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的第一减震轮组或第二减震轮组示意图;
图18为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的第一减震活动板或第二减震活动板示意图;
图19为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的履带连接板示意图;
图20为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的履带减震轮组件示意图;
图21为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的履带示意图
图22为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的撞击效果示意图;
图23为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的爬楼梯示意图;
图24为本发明的能够自由切换履带和麦克纳姆轮的全地形底盘的爬楼梯效果示意图;
图中:1为车体;2为麦轮机构;3为履带机构;4为切换机构; 21为麦克纳姆轮;22为麦轮轴;23为麦轮轴承;24为麦轮电机架; 25为麦轮电机;31为履带;32为履带主动轮组件;33为履带防撞轮组件;34为履带减震轮组件;35为履带连接轴组件;36为履带连接板组件;37为张紧轮;41为框体;42为电推杆;43为导轨;44为滑块;311为横条;321为履带主动轮安装板;322为履带主动轮传动件;323为履带主动轮电机;324为履带主动轮;331为第一防撞轮;332为第二防撞轮;333为防撞轮安装板;334为防撞轮缓冲器; 341为第一减震轮组;342为第二减震轮组;343为减震缓冲器;344 为第一减震活动板;345为第二减震活动板;361为第二缓冲安装孔; 362为履带连接板;3221为主动同步轮;3222为传动同步轮;3223 为同步带;3331,3332为撞轮安装块;3333为第一缓冲安装孔;3401 为减震轮组安装孔;3402为减震缓冲器安装孔;3403为减震活动板安装孔;3404为减震轮安装板;3405为第一减震轮;3406为第二减震轮。
具体实施方式
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
实施例一、
本实施例的能够自由切换履带和麦克纳姆轮的全地形底盘的结构如图1至22所示包括:车体1、麦轮机构2、履带机构3和切换机构4;
履带机构3安装于车体1的两侧,且履带机构3能够独立控制底盘任意方向的行进;
切换机构4安装于车体1底部,麦轮机构2安装于切换机构4上,且切换机构4能够控制麦轮机构2上升或下降,麦轮机构2能够独立控制底盘任意方向的行进。
当切换机构4驱动麦轮机构2下降时,麦轮机构2将整台底盘向上支撑,使履带机构3离地,此时底盘由麦轮机构2驱动行进;
当切换机构4驱动麦轮机构2上升时,麦轮机构2向上移动,使麦轮机构2脱离地面,履带机构3与地面接触,此时底盘由履带机构 3驱动行进;
切换机构4包括框体41、电推杆42、导轨43和滑块44;
麦轮机构2机构安装于框体41上;
电推杆42的第一端与车体1固定,第二端与框体41固定,电推杆42向下推动框体41时麦轮机构2下降,电推杆42回收时麦轮机构2上升;
导轨43与滑块44滑动配合,且导轨43安装于框体41上,滑块 44安装于车体1上;电推杆42和导轨43之间呈平行设置,通过导轨43与滑块44的配合使电推杆42在推动过程中更加稳定。
麦轮机构2包括麦克纳姆轮21、麦轮轴22、麦轮轴承23、麦轮电机架24和麦轮电机25;
麦克纳姆轮21、麦轮轴22、麦轮轴承23、麦轮电机架24和麦轮电机25均同轴设置,麦轮轴承23和麦轮电机架24与框体41固定;
麦轮轴22贯穿麦克纳姆轮21并与麦轮电机25固定,麦轮轴承 23安装在麦轮轴22两端,麦轮轴承23与框体41固定后,麦克纳姆轮21活动安装在框体41上;
麦轮电机25与麦轮电机架24固定,且麦轮电机25前出轴与麦轮轴22连接,麦轮电机25旋转可以驱动麦克纳姆轮21转动。
履带机构3包括履带31、履带主动轮组件32、履带防撞轮组件 33、履带减震轮组件34、履带连接轴组件35和履带连接板组件36;
履带连接轴组件35贯穿履带连接板组件36,履带连接板组件36 第二端与车体1固定,使履带连接板组件36相对于车体1保持一个固定的位置;
履带主动轮组件32安装于履带连接板组件36的第二端,履带主动轮组件32驱动履带31,使履带机构3运动;
履带防撞轮组件33活动安装于履带连接板组件36第一端,当履带机构3正面受到撞击时,履带防撞轮组件33对正面的撞击力起到缓解作用;
履带减震轮组件34活动安装于履带连接轴组件35上;且履带减震轮组件34能够在履带连接轴组件35上转动,使履带减震轮组件 34相对于履带连接板组件36做杠杆运动,
当底盘行驶在凹凸地面上时,履带减震轮组件34在在履带连接轴组件35摆动,从而缓冲震动;
履带31环绕于履带主动轮组件32、履带防撞轮组件33和履带减震轮组件34,并且履带31的内圈与履带主动轮组件32、履带防撞轮组件33和履带减震轮组件34均相切;并在履带主动轮组件32的驱动下环绕履带主动轮组件32、履带防撞轮组件33和履带减震轮组件34旋转。
履带主动轮组件32包括履带主动轮安装板321、履带主动轮传动件322、履带主动轮电机323和履带主动轮324;
履带主动轮安装板321第一端与履带连接板组件36的第二端固定,履带主动轮324活动安装于履带主动轮安装板321第二端;
履带主动轮电机323通过履带主动轮传动件322与履带主动轮 324传动连接;
履带主动轮电机323通过履带主动轮传动件322驱动履带主动轮 324旋转后,履带主动轮324驱动履带31旋转。
主动轮传动件322为同步带轮组件,包括主动同步轮3221、传动同步轮3222和同步带3223;同步带3223套设在主动同步轮3221 与传动同步轮3222上;
主动同步轮3221和传动同步轮3222之间的传动比为6:1;
履带主动轮电机323通过主动同步轮3221和传动同步轮3222的减速之后传递到履带主动轮324上。
履带防撞轮组件33包括第一防撞轮331、第二防撞轮332、防撞轮安装板333和防撞轮缓冲器334;
防撞轮安装板333第一端设有两防撞轮安装块3331,3332,且两防撞轮安装块3331,3332的圆心连接线与防撞轮安装板333主体中心线呈倾斜状;
第一防撞轮331和第二防撞轮332安装于两防撞轮安装块3331, 3332后第一防撞轮331和第二防撞轮332的外圆公切线与地面水平线呈60°夹角,使第一防撞轮331形成履带机构3最前端位置。
防撞轮安装板333第二端与履带连接板组件36第一端活动连接;
防撞轮安装板333第二端向第一端的延伸方向上设有第一缓冲安装孔3333,履带连接板组件36第一端向第二端的延伸方向上设有第二缓冲安装孔361,防撞轮缓冲器334的两端分别与第一缓冲安装孔3333和第二缓冲安装孔361活动连接;向上撬动防撞轮安装板333 能使防撞轮安装板333与履带连接板组件36互相挤压防撞轮缓冲器 334。
当履带机构3受到撞击时,第一防撞轮331最先受到冲击力,此时防撞轮安装板333在冲击力的作用下向上撬动,对防撞轮缓冲器 334进行挤压,冲击力在防撞轮缓冲器334的作用下被分解。
履带减震轮组件34包括第一减震轮组341、第二减震轮组342、减震缓冲器343、第一减震活动板344和第二减震活动板345;
第一减震活动板344和第二减震活动板345均呈三角形,且三个角上分别设有减震轮组安装孔3401、减震缓冲器安装孔3402和减震活动板安装孔3403;
第一减震活动板344和第二减震活动板345对称设置,并通过各自的减震活动板安装孔3403活动套设在履带连接轴组件35上,形成剪刀装,
减震缓冲器343的两端分别与第一减震活动板344和第二减震活动板345各自的减震缓冲器安装孔3402活动连接,使第一减震活动板344和第二减震活动板345之间产生联动;
第一减震轮组341活动安装于第一减震活动板344的减震轮组安装孔3401上,并能在第一减震活动板344做杠杆运动;
第二减震轮组342活动安装于第二减震活动板345的减震轮组安装孔3401上,并能在第二减震活动板345上做杠杆运动。
第一减震轮组341和第二减震轮组342均包括减震轮安装板 3404、第一减震轮3405和第二减震轮3406;
第一减震轮3405和第二减震轮3406活动安装在减震轮安装板 3404的两端。
减震轮安装板3404的中间穿插销轴安装在减震轮组安装孔3401 上;
当履带机构3遇到地面凹凸时,第一减震轮组342和第二减震轮组342就会以减震轮组安装孔3401为支点做杠杆摆动,并向上推动各自的第一减震活动板344和第二减震活动板345,第一减震活动板 344和第二减震活动板345在向上运动时就会挤压减震缓冲器343,从而分解震动。
履带机构3在行进时震动频率非常高,因此对缓冲器的磨损较为厉害,为了提高缓冲器的耐磨性,防撞轮缓冲器334和减震缓冲器 343通常选用液压缓冲器,此类缓冲器相对于弹簧缓冲器具有更高的耐磨性,可以有效的提高履带机构3整体使用寿命。
实施例二、
如图23至24所示,本实施例的能够自由切换履带和麦克纳姆轮的全地形底盘,除了能够通过麦轮机构2和履带机构3自由切换适应全地形外还具有攀爬楼梯的功能;
履带31的外圆上设置有与履带31周长方向垂直的横条311,当履带机构3行进至楼梯时,因为第一防撞轮331和第二防撞轮332的外圆公切线与地面水平线呈60°夹角,因此履带31相对于台阶也成切斜状态,此时履带31不会与台阶呈平行状态的打滑,横条311能够勾住台阶,使履带机构3完成对台阶的攀爬。
为了提升爬升力,在履带31的内侧还可以设置张紧轮37,用于提升履带31的与各轮组之间的摩擦力。
为了安装的稳定性履带连接板组件36通常也是通过两块相同的履带连接板362组装形成。
以上仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
Claims (10)
1.一种能够自由切换履带和麦克纳姆轮的全地形底盘,其特征在于,所述能够自由切换履带和麦克纳姆轮的全地形底盘包括:车体(1)、麦轮机构(2)、履带机构(3)和切换机构(4);
所述履带机构(3)安装于所述车体(1)的两侧,且所述履带机构(3)能够独立控制底盘任意方向的行进;
所述切换机构(4)安装于所述车体(1)底部,所述麦轮机构(2)安装于所述切换机构(4)上,且所述切换机构(4)能够控制所述麦轮机构(2)上升或下降,并且在驱动所述麦轮机构(2)下降时能够使所述麦轮机构(2)将整台底盘支撑至所述履带机构(3)离地;
所述麦轮机构(2)能够独立控制所述底盘任意方向的行进;
所述切换机构(4)包括框体(41)、电推杆(42)、导轨(43)和滑块(44);
所述麦轮机构(2)机构安装于所述框体(41)上;
所述电推杆(42)的第一端与所述车体(1)固定,第二端与所述框体(41)固定,且所述电推杆(42)能够向下推动所述框体(41);
所述导轨(43)与滑块(44)滑动配合,且所述导轨(43)安装于所述框体(41)上,所述滑块(44)安装于车体(1)上;
所述电推杆(42)和导轨(43)之间呈平行设置。
2.如权利要求1所述的能够自由切换履带和麦克纳姆轮的全地形底盘,其特征在于,所述麦轮机构(2)包括麦克纳姆轮(21)、麦轮轴(22)、麦轮轴承(23)、麦轮电机架(24)和麦轮电机(25);
所述麦克纳姆轮(21)、麦轮轴(22)、麦轮轴承(23)、麦轮电机架(24)和麦轮电机(25)均同轴设置,所述麦轮轴承(23)和麦轮电机架(24)与所述框体(41)固定;
所述麦轮轴(22)贯穿所述麦克纳姆轮(21)并与所述麦轮电机(25)固定,所述麦轮轴承(23)安装于所述麦轮轴(22)两端;
所述麦轮电机(25)与所述麦轮电机架(24)固定,且所述所述麦轮电机(25)前出轴与所述麦轮轴(22)连接。
3.如权利要求1所述的能够自由切换履带和麦克纳姆轮的全地形底盘,其特征在于,所述履带机构(3)包括履带(31)、履带主动轮组件(32)、履带防撞轮组件(33)、履带减震轮组件(34)、履带连接轴组件(35)和履带连接板组件(36);
所述履带连接轴组件(35)贯穿所述履带连接板组件(36)并与所述车体(1)固定;
所述履带主动轮组件(32)安装于所述履带连接板组件(36)的第二端,用于驱动所述履带机构(3);
所述履带防撞轮组件(33)活动安装于所述履带连接板组件(36)第一端,且所述履带防撞轮组件(33)能够缓冲正面的撞击力;
所述履带减震轮组件(34)活动安装于所述履带连接轴组件(35)上,且所述履带减震轮组件(34)能够在所述履带连接轴组件(35)上转动,使所述履带减震轮组件(34)相对于所述履带连接板组件(36)做杠杆运动,缓冲因地面凹凸而产生的震动;
所述履带(31)环绕于所述履带主动轮组件(32)、履带防撞轮组件(33)和履带减震轮组件(34),并在所述履带主动轮组件(32)的驱动下环绕所述履带主动轮组件(32)、履带防撞轮组件(33)和履带减震轮组件(34)旋转。
4.如权利要求3所述的能够自由切换履带和麦克纳姆轮的全地形底盘,其特征在于,所述履带主动轮组件(32)包括履带主动轮安装板(321)、履带主动轮传动件(322)、履带主动轮电机(323)和履带主动轮(324);
所述履带主动轮安装板(321)第一端与所述履带连接板组件(36)的第二端固定,所述履带主动轮(324)活动安装于所述履带主动轮安装板(321)第二端;
所述履带主动轮电机(323)通过所述履带主动轮传动件(322)与所述履带主动轮(324)传动连接,并能驱动所述履带主动轮(324)旋转。
5.如权利要求4所述的能够自由切换履带和麦克纳姆轮的全地形底盘,其特征在于,所述主动轮传动件(322)为同步带轮组件,包括主动同步轮(3221)、传动同步轮(3222)、和同步带(3223);
所述主动同步轮(3221)和所述传动同步轮(3222)之间的传动比为6:1。
6.如权利要求3所述的能够自由切换履带和麦克纳姆轮的全地形底盘,其特征在于,所述履带防撞轮组件(33)包括第一防撞轮(331)、第二防撞轮(332)、防撞轮安装板(333)和防撞轮缓冲器(334);
所述防撞轮安装板(333)第一端设有两防撞轮安装块(3331,3332),且所述两防撞轮安装块(3331,3332)的圆心连接线与所述防撞轮安装板(333)主体中心线呈倾斜状;
所述第一防撞轮(331)和第二防撞轮(332)安装于所述两防撞轮安装块(3331,3332)后所述第一防撞轮(331)和第二防撞轮(332)的外圆公切线与地面水平线呈60°夹角;
所述防撞轮安装板(333)第二端与所述履带连接板组件(36)第一端活动连接;
所述防撞轮安装板(333)第二端向第一端的延伸方向上设有第一缓冲安装孔(3333),所述履带连接板组件(36)第一端向第二端的延伸方向上设有第二缓冲安装孔(361),所述防撞轮缓冲器(334)的两端分别与所述第一缓冲安装孔(3333)和所述第二缓冲安装孔(361)活动连接。
7.如权利要求6所述的能够自由切换履带和麦克纳姆轮的全地形底盘,其特征在于,所述履带减震轮组件(34)包括第一减震轮组(341)、第二减震轮组(342)、减震缓冲器(343)、第一减震活动板(344)和第二减震活动板(345);
所述第一减震活动板(344)和第二减震活动板(345)均呈三角形,且三个角上分别设有减震轮组安装孔(3401)、减震缓冲器安装孔(3402)和减震活动板安装孔(3403);
所述第一减震活动板(344)和所述第二减震活动板(345)对称设置,并通过各自的减震活动板安装孔(3403)活动套设在所述履带连接轴组件(35)上;
所述减震缓冲器(343)的两端分别与所述第一减震活动板(344)和所述第二减震活动板(345)各自的减震缓冲器安装孔(3402)活动连接,使所述第一减震活动板(344)和所述第二减震活动板(345)之间产生联动;
所述第一减震轮组(341)活动安装于所述第一减震活动板(344)的所述减震轮组安装孔(3401)上,并能在所述第一减震活动板(344)做杠杆运动;
所述第二减震轮组(342)活动安装于所述第二减震活动板(345)的所述减震轮组安装孔(3401)上,并能在所述第二减震活动板(345)上做杠杆运动。
8.如权利要求7所述的能够自由切换履带和麦克纳姆轮的全地形底盘,其特征在于,所述第一减震轮组(341)和所述第二减震轮组(342)均包括减震轮安装板(3404)、第一减震轮(3405)和第二减震轮(3406);
所述第一减震轮(3405)和所述第二减震轮(3406)活动安装在所述减震轮安装板(3404)的两端。
9.如权利要求8所述的能够自由切换履带和麦克纳姆轮的全地形底盘,其特征在于,所述防撞轮缓冲器(334)和所述减震缓冲器(343)均为液压缓冲器。
10.如权利要求3所述的能够自由切换履带和麦克纳姆轮的全地形底盘,其特征在于,所述履带(31)的外圆上均布有与所述履带(31)周长方向垂直的横条(311)。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911094187.5A CN110901778A (zh) | 2019-11-11 | 2019-11-11 | 一种能够自由切换履带和麦克纳姆轮的全地形底盘 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911094187.5A CN110901778A (zh) | 2019-11-11 | 2019-11-11 | 一种能够自由切换履带和麦克纳姆轮的全地形底盘 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN110901778A true CN110901778A (zh) | 2020-03-24 |
Family
ID=69816363
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201911094187.5A Pending CN110901778A (zh) | 2019-11-11 | 2019-11-11 | 一种能够自由切换履带和麦克纳姆轮的全地形底盘 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN110901778A (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111746676A (zh) * | 2020-07-09 | 2020-10-09 | 仲兆宏 | 用于无障碍移动平衡车的轮组以及平衡车 |
| CN113757485A (zh) * | 2021-09-01 | 2021-12-07 | 西安石油大学 | 长输油气管道巡检仿生蛇机器人 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0597069A (ja) * | 1991-10-08 | 1993-04-20 | Osaka Gas Co Ltd | クローラ式走行車 |
| JP2002284048A (ja) * | 2001-03-28 | 2002-10-03 | Yanmar Diesel Engine Co Ltd | 電動車 |
| CN107140042A (zh) * | 2017-06-02 | 2017-09-08 | 南京理工大学 | 一种轮履复合式底盘结构 |
| CN207225503U (zh) * | 2017-07-27 | 2018-04-13 | 青岛容商天下网络有限公司 | 全地形履带式agv运输机器人 |
| CN107932471A (zh) * | 2017-11-21 | 2018-04-20 | 东北大学 | 一种基于麦克纳姆轮的轮履复合式全方位移动底盘 |
| CN109109989A (zh) * | 2018-09-10 | 2019-01-01 | 华南理工大学 | 一种基于履带和麦克纳姆轮的全地形底盘 |
-
2019
- 2019-11-11 CN CN201911094187.5A patent/CN110901778A/zh active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0597069A (ja) * | 1991-10-08 | 1993-04-20 | Osaka Gas Co Ltd | クローラ式走行車 |
| JP2002284048A (ja) * | 2001-03-28 | 2002-10-03 | Yanmar Diesel Engine Co Ltd | 電動車 |
| CN107140042A (zh) * | 2017-06-02 | 2017-09-08 | 南京理工大学 | 一种轮履复合式底盘结构 |
| CN207225503U (zh) * | 2017-07-27 | 2018-04-13 | 青岛容商天下网络有限公司 | 全地形履带式agv运输机器人 |
| CN107932471A (zh) * | 2017-11-21 | 2018-04-20 | 东北大学 | 一种基于麦克纳姆轮的轮履复合式全方位移动底盘 |
| CN109109989A (zh) * | 2018-09-10 | 2019-01-01 | 华南理工大学 | 一种基于履带和麦克纳姆轮的全地形底盘 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111746676A (zh) * | 2020-07-09 | 2020-10-09 | 仲兆宏 | 用于无障碍移动平衡车的轮组以及平衡车 |
| CN113757485A (zh) * | 2021-09-01 | 2021-12-07 | 西安石油大学 | 长输油气管道巡检仿生蛇机器人 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110329375B (zh) | 履带型摆臂悬挂式行走机构及履带车辆 | |
| CN106335563A (zh) | 一种双列复合承重轮组履带式移动底盘减震行走机构 | |
| CN205440591U (zh) | 一种履带式移动底盘避震机构 | |
| CN102390447B (zh) | 带悬浮减震装置的低置式履带行走系统 | |
| CN109454624B (zh) | 一种管廊机器人系统 | |
| CN110901778A (zh) | 一种能够自由切换履带和麦克纳姆轮的全地形底盘 | |
| CN102390445B (zh) | 带悬浮减震装置的高置式履带行走系统 | |
| CN103171636A (zh) | 一种两栖特种车辆的履带式行走系统 | |
| CN206155604U (zh) | 一种非对称上导轮自张紧式履带行走机构 | |
| CN112605980A (zh) | 一种用于机器人的防撞底座 | |
| CA1057799A (en) | Method of and means for reducing track noise in a track-type vehicle | |
| CN111572656B (zh) | 一种具备阻尼缓冲特性的悬挂系统及履带式移动平台 | |
| CN103879466B (zh) | 一种履带式变刚度独立悬架动力底盘 | |
| CN201140735Y (zh) | 履带式车辆支重轮悬挂装置 | |
| CN117818783A (zh) | 一种越障稳定的智能履带机器人行走机构 | |
| CN210555250U (zh) | 一种agv小车用减震车轮组件及双驱车轮组 | |
| CN210101212U (zh) | 一种车辆及独立悬挂系统 | |
| CN202243748U (zh) | 带悬浮减震装置的高置式履带行走系统 | |
| CN110895124B (zh) | 一种用于射击训练的全自动移动靶标 | |
| US20160114841A1 (en) | Elastomeric Track Assembly and Track Band Having Damping Features | |
| CN1676398A (zh) | 万向防翻特种车 | |
| CN110906785A (zh) | 一种用于控制步枪射击的机器人 | |
| CN218703572U (zh) | 一种适应性强的履带式移动靶车 | |
| CN214356323U (zh) | 一种适用于石油领域的履带式运输车底盘行走装置 | |
| CN206086947U (zh) | 一种复合承载式多用途履带底盘 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20200324 |
|
| RJ01 | Rejection of invention patent application after publication |