CN110118552B - 位置检测装置及位置检测方法 - Google Patents
位置检测装置及位置检测方法 Download PDFInfo
- Publication number
- CN110118552B CN110118552B CN201910083033.XA CN201910083033A CN110118552B CN 110118552 B CN110118552 B CN 110118552B CN 201910083033 A CN201910083033 A CN 201910083033A CN 110118552 B CN110118552 B CN 110118552B
- Authority
- CN
- China
- Prior art keywords
- absolute
- absolute value
- track
- increment
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/04—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by terrestrial means
- G01C21/08—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by terrestrial means involving use of the magnetic field of the earth
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/16—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying resistance
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Life Sciences & Earth Sciences (AREA)
- Environmental & Geological Engineering (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Automation & Control Theory (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
本发明提供一种即使在磁传感器装置相对于磁尺倾斜的情况下,也能够准确地计算绝对位置的位置检测装置及位置检测方法。磁尺(2)具备图案偏移了一半节距的第一绝对磁道(21)和第二绝对磁道(22)。磁传感器装置(3)具备在增量信号(INC)的相位偏移时输出修正了相位偏移的修正增量信号(C_INC)的增量信号修正部(43)。计算绝对位置的计算部(44)在修正增量信号(C_INC)从零达到中央值,在绝对位置的计算中使用来自第一绝对磁道(21)的第一绝对值(ABS1),在修正增量信号(C_INC)从中央值达到最大值,在绝对位置的计算中使用来自第二绝对磁道(22)的第二绝对值(ABS2)。
Description
技术领域
本发明涉及通过磁传感器装置检测相对移动的磁尺的位置的位置检测装置及位置检测装置的位置检测方法。
背景技术
输出绝对值的位置检测装置记载于专利文献1。该文献的位置检测器具备磁传感器装置和相对于磁传感器装置相对移动的磁尺。磁尺具备沿相对移动方向以规定的节距形成有绝对图案的绝对磁道和与绝对磁道并排并以与绝对图案对应的节距形成有增量图案的增量磁道。磁传感器装置具备读取绝对磁道并输出绝对值的绝对值输出部、读取增量磁道并输出周期性的增量信号的增量信号输出部、基于绝对值和增量信号计算磁尺的绝对位置的计算部。绝对值输出部具备用于读取绝对图案的绝对信号获取用的感磁元件,增量信号输出部具备用于读取增量图案的增量信号获取用的感磁元件。
绝对图案是将磁化区域和非磁化区域以一定节距的非重复图案排列成的图案。绝对信号获取用的感磁元件具备使感磁方向朝向相对移动方向的多个磁阻元件。多个磁阻元件以与非重复图案相同的节距沿相对移动方向排列,在磁尺和磁传感器相对移动时,检测多个区域的磁场。绝对值输出部输出将从各磁阻元件输出的信号为规定的阈值以上的区域的理论值设为1、将不超过规定的阈值的区域设为理论值0的多个比特的M系列的不规则循环随机码。计算部基于增量信号的相位及绝对值计算磁尺或磁传感器装置的绝对位置。
现有技术文献
专利文献
专利文献1:日本特开2017-102089号公报
发明内容
发明所要解决的技术问题
磁尺具备并排设置的绝对磁道和增量磁道,在磁传感器装置中具备沿与相对移动方向正交的方向排列的绝对信号获取用的感磁元件和增量信号获取用的感磁元件的位置检测装置中,存在当磁传感器装置相对于磁尺的姿势沿相对移动方向倾斜时,不能准确地计算绝对位置的问题。即,当磁传感器装置相对于磁尺的姿势沿相对移动方向倾斜时,绝对信号获取用的感磁元件的位置和增量信号获取用的感磁元件的位置沿相对移动方向偏移。由此,增量信号的相位相对于获取新的绝对值的绝对值获取时刻偏移。因此,基于绝对值和增量信号算出的绝对位置为错误的值。
鉴于以上问题,本发明的技术问题在于,提供一种即使在磁传感器装置的设置姿势相对于磁尺的相对移动方向倾斜的情况下,也能够准确地计算绝对位置的位置检测装置。另外,提供一种这样的位置检测装置的位置检测方法。
解决问题所采用的技术方案
为了解决上述技术问题,本发明提供一种位置检测装置,其具有磁尺和磁传感器装置,所述磁尺具备:具有磁化区域和非磁化区域以第一节距排列而成的绝对图案的绝对磁道;以及具有磁化区域和非磁化区域交替排列而成的增量图案且与所述绝对磁道并排设置的增量磁道,所述磁传感器装置具备:读取相对移动的所述磁尺的所述绝对磁道并输出绝对值的绝对值输出部;读取相对移动的所述磁尺的所述增量磁道并输出从零变化到规定的最大值的周期性的增量信号的增量信号输出部;以及基于所述绝对值及所述增量信号计算绝对位置的计算部,所述位置检测装置的特征在于,所述位置检测装置具有修正所述增量信号的增量信号修正部,所述增量信号修正部获取实际的所述增量信号的增量开始时刻相对于作为所述增量信号开始增量的增量开始时刻而预先设定的基准增量开始时刻偏移的偏移量,基于所述偏移量生成修正了所述增量信号的相位偏移的修正增量信号,所述计算部在所述绝对位置的计算中使用所述修正增量信号。
根据本发明,在由于磁传感器装置的设置姿势相对于磁尺的相对移动方向倾斜等,从增量信号输出部实际输出的增量信号开始增量的增量开始时刻相对于预定的基准增量开始时刻偏移的情况下,增量信号修正部基于该偏移量生成修正了增量信号的相位偏移的修正增量信号。另外,计算部在绝对位置的计算中使用修正增量信号。由此,由计算部算出的绝对位置为正确的值。
在本发明中,理想的是,所述绝对磁道具备:第一磁道,其具有所述绝对图案;以及第二磁道,其具有相对于所述第一磁道在相对移动方向上偏移了第二节距的所述绝对图案,且与所述第一磁道并排设置,所述第二节距是所述第一节距的一半,所述绝对值输出部具备读取所述第一磁道并输出第一绝对值的第一绝对值输出部和读取所述第二磁道并输出第二绝对值的第二绝对值输出部,所述基准增量开始时刻是所述磁尺和所述磁传感器装置从所述第一绝对值输出部输出新的所述绝对值的第一绝对值输出时刻起相对移动了所述第一节距的1/4节距的时刻,从所述修正增量信号为0的时刻到该修正增量信号达到零和所述最大值的中央的中央值,所述计算部在所述绝对位置的计算中使用所述第一绝对值,从所述修正增量信号达到所述中央值的时刻到所述修正增量信号达到所述最大值,所述计算部在所述绝对位置的计算中使用所述第二绝对值。
据此,在绝对磁道上,用于获取第一绝对值的第一磁道的绝对图案和用于获取第二绝对值的第二磁道的绝对图案在磁尺和磁传感器装置的相对移动方向上偏移一半节距(第二节距)。另外,增量信号输出部输出的增量信号从磁尺和磁传感器装置从第一绝对值输出部输出新的所述绝对值的第一绝对值输出时刻起相对移动了第一节距的1/4节距的时刻开始增量。而且,基于绝对值和修正增量信号计算绝对位置的计算部在从修正增量信号的增量开始时刻到修正增量信号达到中央值的第一期间,在绝对位置的计算中使用第一绝对值,在从修正增量信号达到中央值的时刻到修正增量信号达到最大值的第二期间,在绝对位置的计算中使用第二绝对值。由此,计算部在计算绝对位置时,不使用通过检测在第一磁道的绝对图案中存在于每个第一节距的各图案区域的边界而获取的第一绝对值。另外,计算部也不使用通过检测在第二磁道的绝对图案中存在于每个第一节距的各图案区域的边界而获取的第二绝对值。在此,在第一磁道的绝对图案及第二磁道的绝对图案中存在于每个第一节距的各图案区域的边界,磁场不稳定,因此,通过检测各图案区域的边界而获取的第一绝对值及第二绝对值有时是不准确的值。与此相对,如果计算部在计算绝对位置时不使用通过检测各图案区域的边界而获取的第一绝对值及第二绝对值,则能够使用准确的绝对值(第一绝对值或第二绝对值)计算绝对位置。
在本发明中,可以是,所述增量磁道具备在所述相对移动方向上以所述第二节距交替磁化出N极和S极的增量图案。据此,容易使获取绝对值的周期和增量信号的周期一致。
在本发明中,可以是,所述增量信号修正部基于所述第一绝对值和所述第二绝对值从相同的值变化为不同的值的第一时刻的所述增量信号的第一值以及接着所述第一时刻的所述第一绝对值和所述第二绝对值返回相同的值的第二时刻的所述增量信号的第二值,获取所述偏移量。据此,因为能够容易地获取偏移量,所以增量信号修正部进行的修正增量信号的生成变得容易。
在本发明中,可以是,所述增量信号修正部基于所述第一绝对值和所述第二绝对值从不同的值变化为相同的值的第三时刻的所述增量信号的第三值以及接着所述第三时刻的所述第一绝对值和所述第二绝对值返回不同的值的第四时刻的所述增量信号的第四值,获取所述偏移量。据此,因为能够容易地获取偏移量,所以增量信号修正部进行的修正增量信号的生成变得容易。
接着,本发明提供一种位置检测方法,是位置检测装置的位置检测方法,所述位置检测装置具有磁尺和磁传感器装置,所述磁尺具备:具有磁化区域和非磁化区域以第一节距排列而成的绝对图案的绝对磁道;以及具有磁化区域和非磁化区域交替排列而成的增量图案且与所述绝对磁道并排设置的增量磁道,所述磁传感器装置具备:读取相对移动的所述磁尺的所述绝对磁道并输出绝对值的绝对值输出部;以及读取相对移动的所述磁尺的所述增量磁道并输出从零变化到规定的最大值的周期性的增量信号的增量信号输出部,所述位置检测装置基于所述绝对值及所述增量信号计算绝对位置,所述位置检测方法的特征在于,将所述增量信号开始增量的增量开始时刻预先设定为基准增量开始时刻,获取实际的所述增量信号的增量开始时刻相对于所述基准增量开始时刻偏移的偏移量,基于所述偏移量生成修正了所述增量信号的相位偏移的修正增量信号,所述绝对位置的计算使用所述修正增量信号。
根据本发明,在由于磁传感器装置的设置姿势相对于磁尺的相对移动方向倾斜等,从增量信号输出部实际输出的增量信号开始增量的增量开始时刻相对于预定的基准增量开始时刻偏移的情况下,基于该偏移量生成修正了增量信号的相位偏移的修正增量信号。另外,绝对位置的计算使用修正增量信号。因此,由计算部算出的绝对位置为正确的值。
在本发明中,理想的是,作为所述绝对磁道,预先具备:第一磁道,其具有所述绝对图案;以及第二磁道,其具有相对于所述第一磁道在相对移动方向上偏移了第二节距的所述绝对图案,且与所述第一磁道并排设置,所述第二节距是所述第一节距的一半,并且,作为所述绝对值输出部,预先具备读取所述第一磁道并输出第一绝对值的第一绝对值输出部和读取所述第二磁道并输出第二绝对值的第二绝对值输出部,将所述基准增量开始时刻设定为:所述磁尺和所述磁传感器装置从所述第一绝对值输出部输出新的所述绝对值的第一绝对值输出时刻起相对移动了所述第一节距的1/4节距的时刻,从所述修正增量信号为0的时刻到该修正增量信号达到零和所述最大值的中央的中央值,所述绝对位置的计算使用所述第一绝对值,从所述修正增量信号达到所述中央值的时刻到所述修正增量信号达到所述最大值,所述绝对位置的计算使用所述第二绝对值。
据此,在绝对磁道上,用于获取第一绝对值的第一磁道的绝对图案和用于获取第二绝对值的第二磁道的绝对图案在磁尺和磁传感器装置的相对移动方向上偏移一半节距(第二节距)。另外,增量信号从磁尺和磁传感器装置从第一绝对值输出时刻起相对移动了第一节距的1/4节距的时刻开始增量。而且,在计算绝对位置时,在从修正增量信号的增量开始时刻到修正增量信号达到中央值的第一期间,绝对位置的计算使用第一绝对值,在从修正增量信号达到中央值的时刻到修正增量信号达到最大值的第二期间,绝对位置的计算使用第二绝对值。因此,在计算绝对位置时,不使用通过检测在第一磁道的绝对图案中存在于每个第一节距的各图案区域的边界而获取的第一绝对值,也不使用通过检测在第二磁道的绝对图案中存在于每个第一节距存在的各图案区域的边界而获取的第二绝对值。在此,在第一磁道的绝对图案及第二磁道的绝对图案中存在于每个第一节距的各图案区域的边界,磁场不稳定,因此,通过检测各图案区域的边界而获取的第一绝对值及第二绝对值有时是不准确的值。与此相对,如果绝对位置的计算不使用通过检测各图案区域的边界而获取的第一绝对值及第二绝对值,则能够使用准确的绝对值(第一绝对值或第二绝对值)计算绝对位置。
在本发明中,可以是,在所述增量磁道具备在所述相对移动方向上以所述第二节距交替磁化出N极和S极的增量图案。据此,容易使获取绝对值的周期和增量信号的周期一致。
在本发明中,可以是,基于所述第一绝对值和所述第二绝对值从相同的值变化为不同的值的第一时刻的所述增量信号的第一值以及接着所述第一时刻的所述第一绝对值和所述第二绝对值返回相同的值的第二时刻的所述增量信号的第二值,获取所述偏移量。据此,因为能够容易地获取偏移量,所以修正增量信号的生成变得容易。
在本发明中,可以是,所述增量信号修正部基于所述第一绝对值和所述第二绝对值从不同的值变化为相同的值的第三时刻的所述增量信号的第三值以及接着所述第三时刻的所述第一绝对值和所述第二绝对值返回不同的值的第四时刻的所述增量信号的第四值,获取所述偏移量。据此,因为能够容易地获取偏移量,所以修正增量信号的生成变得容易。
发明效果
根据本发明,在由于磁传感器装置的设置姿势相对于磁尺的相对移动方向倾斜等,增量信号开始增量的增量开始时刻相对于预定的基准增量开始时刻偏移的情况下,基于该偏移量生成修正了增量信号的相位偏移的修正增量信号。另外,绝对位置的计算使用修正增量信号。因此,通过计算部计算出的绝对位置为正确的值。
附图说明
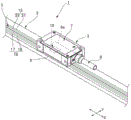
图1是应用了本发明的磁式编码器装置的说明图。
图2(a)及图2(b)是磁尺的磁道和磁传感器装置的传感器基板的说明图。
图3是磁式编码器装置的控制系统的框图。
图4(a)、图4(b)、图4(c)及图4(d)是磁传感器装置获取的各信号及值的说明图。
图5是绝对位置的计算动作的流程图。
附图标记说明
1…磁式编码器装置(位置检测装置)、2…磁尺、3…磁传感器装置、5…磁道、7…保持架、8…线缆、9…对置面、9a…开口部、10…磁传感器、11…传感器基板、12…绝对信号获取用的感磁元件、13…增量信号获取用的感磁元件、15…绝对磁道、16…增量磁道、17…第一增量磁道、18…第二增量磁道、17a…第一增量图案、18a…第二增量图案、21…第一绝对磁道、21a…第一绝对图案、22…第二绝对磁道、22a…第二绝对图案、31…第一磁阻图案、32…第二磁阻图案、34(-a)…SIN-信号检测用的磁阻图案、34(+b)…COS+信号检测用的磁阻图案、34(-b)…COS-信号检测用的磁阻图案、34(+a)…SIN+信号检测用的磁阻图案、37…第一绝对值输出部、38…第二绝对值输出部、39…增量信号输出部、40…运算处理部、41…绝对值获取部、42…增量信号获取部、43…增量信号修正部、44…计算部、45…第一绝对值获取部、46…第二绝对值获取部、ABS1…第一绝对值、ABS2…第二绝对值、CORD1…第一不规则循环随机码、CORD2…第二不规则循环随机码、INC1…增量信号INC的第一值、INC2…增量信号INC的第二值、INC3…增量信号INC的第三值、INC4…增量信号INC的第四值、P1…第一节距、P2…第二节距、T1…第一期间、T2…第二期间。
具体实施方式
以下,参照附图,说明应用了本发明的位置检测装置的实施方式的磁式编码器装置。
图1是说明应用了本发明的磁式编码器装置的说明图。图2(a)是设于磁尺上的磁道的说明图,图2(b)是读取磁道的磁传感器装置的传感器基板的说明图。
如图1所示,本例的磁式编码器装置1(位置检测装置)具备磁尺2和读取磁尺2的磁传感器装置3。磁尺2具备沿该磁尺2和磁传感器装置3的相对移动方向延伸的磁道5。磁传感器装置3在磁尺2相对移动时,检测形成于磁尺2的表面的磁场的变化,并输出磁尺2或磁传感器装置3的绝对移动位置。在以下的说明中,将磁尺2和磁传感器装置3的相对移动方向设为X方向,将与X方向正交的正交方向设为Y方向。
磁传感器装置3具备由非磁性材料构成的保持架7和从保持架7延伸的线缆8。保持架7具备与磁尺2对置的对置面9。在对置面9设有开口部9a。在开口部9a配置有磁传感器10。如图2(b)所示,磁传感器10具备硅基板或陶瓷基板等传感器基板11和在传感器基板11上形成于与磁尺2对置的基板面上的多个感磁元件12、13。感磁元件12、13例如具有作为感磁膜具备坡莫合金膜的磁阻元件。感磁元件12、13与磁尺2隔着规定的间隙对置。
磁式编码器装置1将磁尺2及磁传感器装置3中的一方配置于固定体侧,将另一方配置于移动体侧。在本例中,将磁尺2配置于移动体侧,将磁传感器装置3配置于固定体侧。
(磁尺)
如图2(a)所示,磁道5具有沿磁尺2和磁传感器装置3的相对移动方向即X方向延伸的绝对磁道15和增量磁道16。绝对磁道15和增量磁道16并排设置,沿X方向平行延伸。绝对磁道15具备并排设置的第一绝对磁道21(第一磁道)和第二绝对磁道22(第二磁道)。增量磁道16具备并排设置的第一增量磁道17和第二增量磁道18。
第一绝对磁道21具有以第一节距P1形成的第一绝对图案21a。第一绝对图案21a是将磁化的磁化区域和非磁化的非磁化区域以第一节距P1的非重复图案(虚拟随机图案)排列成的图案。构成一个图案区域的各磁化区域在X方向上具有N极和S极。绝对磁道15的第二绝对磁道22具有相对于第一绝对磁道21的第一绝对图案21a在相对移动方向上错开第一节距P1的一半的第二节距P2的第二绝对图案22a。在本例中,第一节距P1为0.8mm,第二节距P2为0.4mm。
在此,第一绝对图案21a及第二绝对图案22a通过连续的n节距量的图案区域中的磁化区域和非磁化区域的排列来表现表示磁尺2上的绝对位置的M系列的不规则循环随机码。更具体而言,在将磁化区域设为理论值1,将非磁化区域设为理论值0时,通过连续的n个区域中的1和0的排列用值表示M系列的不规则循环随机码。在本例中,n为6。
第一增量磁道17具有以第一节距P1的一半的第二节距P2形成的第一增量图案17a。第一增量图案17a是沿X方向以第二节距P2交替磁化出N极和S极而成的图案。第二增量磁道18具有以第二节距P2形成的第二增量图案18a。第二增量图案18a是沿X方向以第二节距P2交替磁化出N极和S极而成的图案,N极和S极的磁化的顺序与第一增量图案17a相反。因此,在Y方向上,第一增量图案17a的N极和第二增量图案18a的S极相邻。另外,在Y方向上,第一增量图案17a的S极和第二增量图案18a的N极相邻。
(磁传感器装置)
如图2(b)所示,磁传感器10的传感器基板11在与磁尺2对置的基板面上具备绝对信号获取用的感磁元件12和增量信号获取用的感磁元件13。绝对信号获取用的感磁元件12和增量信号获取用的感磁元件13沿Y方向排列。
绝对信号获取用的感磁元件12具备用于从第一绝对磁道21的第一绝对图案21a获取第一绝对信号的第一磁阻图案31和用于从第二绝对磁道22的第二绝对图案22a获取第二绝对信号的第二磁阻图案32。第一磁阻图案31和第二磁阻图案32沿Y方向排列且沿X方向平行延伸。在使磁传感器装置3与磁尺2对置时,第一磁阻图案31与第一绝对磁道21对置,第二磁阻图案32与第二绝对磁道22对置。
第一磁阻图案31及第二磁阻图案32分别具备以使感磁方向朝向X方向的姿势沿X方向排列的多个磁阻元件。多个磁阻元件以第一节距P1排列。第一磁阻图案31依次检测在X方向上连续的第一绝对图案21a的六个区域各自的磁场并输出6行第一绝对信号。同样,第二磁阻图案32依次检测在X方向上连续的第二绝对图案22a的多个区域各自的磁场并输出6行第二绝对信号。
增量信号获取用的感磁元件13具备SIN+信号检测用的磁阻图案34(+a)、COS+信号检测用的磁阻图案34(+b)、SIN-信号检测用的磁阻图案34(-a)、COS-信号检测用的磁阻图案34(-b)。在本方式中,SIN+信号检测用的磁阻图案34(+a)和COS-信号检测用的磁阻图案34(-b)沿X方向排列。另外,COS+信号检测用的磁阻图案34(+b)和SIN-信号检测用的磁阻图案34(-a)沿X方向排列。SIN+信号检测用的磁阻图案34(+a)和COS+信号检测用的磁阻图案34(+b)在Y方向上相邻。COS-信号检测用的磁阻图案34(-b)和SIN-信号检测用的磁阻图案34(-a)在Y方向上相邻。在使磁传感器装置3与磁尺2对置时,SIN+信号检测用的磁阻图案34(+a)和COS-信号检测用的磁阻图案34(-b)与第一增量磁道17对置,SIN+信号检测用的磁阻图案34(+a)和COS-信号检测用的磁阻图案34(-b)与第二增量磁道18对置。
在此,在磁尺2相对于磁传感器装置3移动时,从磁阻图案34(+a)输出的信号和从磁阻图案34(+b)输出的信号彼此具有90°的相位差。从磁阻图案34(-a)输出的信号和从磁阻图案34(-b)输出的信号彼此具有90°的相位差。从磁阻图案34(+a)输出的信号和从磁阻图案34(-a)输出的信号具有180°的相位差。从磁阻图案34(+b)输出的信号和从磁阻图案34(-b)输出的信号具有180°的相位差。
图3是表示磁式编码器装置1的控制系统的概略框图。图4(a)、图4(b)、图4(c)及图4(d)是磁传感器装置3通过读取磁尺2而获取的各信号及值的说明图。图4(a)是第一绝对值获取部及第二绝对值获取部获取的M系列的不规则循环随机码的说明图。图4(b)是第一绝对值输出部及第二绝对值输出部基于M系列的不规则循环随机码输出的绝对值的说明图。图4(c)是增量信号输出部实际输出的增量信号的说明图。图4(d)是增量信号修正部生成的修正增量信号的说明图。图5是绝对位置的计算动作的流程图。
如图3所示,磁传感器装置3的控制系统具备运算处理部40,运算处理部具备CPU、ROM、RAM等。在本例中,运算处理部40安装在传感器基板11上。在运算处理部40的输入侧连接有绝对信号获取用的感磁元件12及增量信号获取用的感磁元件13。运算处理部40具备绝对值获取部41、增量信号获取部42、增量信号修正部43及计算绝对位置的计算部44。绝对值获取部41具备第一绝对值获取部45和第二绝对值获取部46。
在此,绝对信号获取用的感磁元件12的第一磁阻图案31和第一绝对值获取部45构成读取第一绝对磁道21并输出第一绝对值ABS1的第一绝对值输出部37。绝对信号获取用的感磁元件12的第二磁阻图案32和第二绝对值获取部46构成读取第二绝对磁道22并输出第二绝对值ABS2的第二绝对值输出部38。增量信号获取用的感磁元件13和增量信号获取部42构成读取增量磁道16并输出增量信号INC的增量信号输出部39。
首先,如图4(a)所示,第一绝对值获取部45基于从第一磁阻图案31输出的6行第一绝对信号,获取6比特的第一不规则循环随机码CORD1。接着,如图4(b)所示,第一绝对值获取部45将所获取的第一不规则循环随机码CORD1置换为整数数列,获取第一绝对值ABS1。当第一绝对值获取部45获取第一绝对值ABS1时,第一绝对值输出部37输出第一绝对值ABS1。
如图4(a)所示,第二绝对值获取部46基于从第二磁阻图案32输出的6行第二绝对信号,获取6比特的第二不规则循环随机码CORD2。而且,如图4(b)所示,第二绝对值获取部46将所获取的第二不规则循环随机码CORD2置换为整数数列,获取第二绝对值ABS2。当第二绝对值获取部46获取第二绝对值ABS2时,第二绝对值输出部38输出第二绝对值ABS2。如图4(b)所示,来自第一绝对值输出部37的第一绝对值ABS1和来自第二绝对值输出部38的第二绝对值ABS2在磁尺2和磁传感器装置3相对移动时,在移动距离偏移了第二节距P2量的时刻被输出。
增量信号获取部42基于来自SIN+信号检测用的磁阻图案34(+a)的信号及来自SIN-信号检测用的磁阻图案34(-a)的信号,获取正弦波信号。另外,增量信号获取部42基于来自COS+信号检测用的磁阻图案34(+b)的信号及来自COS-信号检测用的磁阻图案34(-b)的信号,获取余弦波信号。而且,增量信号获取部42基于正弦波信号及余弦波信号,进行插值分割处理,如图4(c)所示,生成从零变化到规定的最大值的周期性的增量信号INC。当通过增量信号获取部42生成增量信号INC时,增量信号输出部39输出增量信号INC。
在此,增量信号INC被预先设定为从磁尺2和磁传感器装置3从第一绝对值输出部37输出新的第一绝对值ABS1的第一绝对值输出时刻At0起相对移动了第一节距P1的1/4节距的时刻开始增量。在本例中,在磁尺2上,将增量磁道16的增量图案17a、18a设为相对于第一绝对磁道21的第一绝对图案21a错开1/4节距。由此,将增量信号INC的增量开始时刻设为磁尺2和磁传感器装置3从第一绝对值输出时刻At0起相对移动了第一节距P1的1/4节距的时刻。另外,在本例中,最大值为8000,增量信号INC从零到8000计数。
接着,将磁尺2和磁传感器装置3从第一绝对值输出时刻At0起相对移动了第一节距P1的1/4节距的时刻作为基准增量开始时刻I0,当实际的增量信号INC的增量开始时刻It0相对于基准增量开始时刻I0偏移时,增量信号修正部43修正增量信号INC。
在此,实际从增量信号输出部39输出的增量信号INC相对于预先设定的基准增量开始时刻I0偏移的现象在磁传感器装置3的设置姿势相对于磁尺2的相对移动方向即X方向倾斜时产生。即,磁式编码器装置1在磁尺2上具备沿Y方向排列且沿X方向延伸的绝对磁道15和增量磁道16。另一方面,在磁传感器装置3上具备沿Y方向排列的绝对信号获取用的感磁元件12和增量信号获取用的感磁元件13。因此,在磁传感器装置3的设置姿势从作为基准的姿势沿磁尺2的相对移动方向倾斜时,绝对信号获取用的感磁元件12的磁阻图案(第一磁阻图案31及第二磁阻图案32)和增量信号获取用的感磁元件13的磁阻图案(SIN+信号检测用的磁阻图案34(+a)、COS+信号检测用的磁阻图案34(+b)、SIN-信号检测用的磁阻图案34(-a)、COS-信号检测用的磁阻图案34(-b))的配置在X方向上偏移。其结果是,实际的增量信号INC的增量开始时刻It0从基准增量开始时刻I0偏移。当实际的增量信号INC的增量开始时刻It0从基准增量开始时刻I0偏移时,存在由计算部44算出的绝对位置成为错误的值的问题。为了对应这种问题,增量信号修正部43生成修正了增量信号INC的相位偏移的修正增量信号C_INC。
如图3所示,增量信号修正部43设于增量信号输出部39和计算部44之间。在增量信号修正部43的输入侧连接有第一绝对值输出部37、第二绝对值输出部38及增量信号输出部39。在增量信号修正部43的输出侧连接有计算部44。
如图5所示,增量信号修正部43首先获取实际的增量信号INC的增量开始时刻It0相对于基准增量开始时刻I0偏移的偏移量E(步骤ST1)。换言之,增量信号修正部43获取实际的增量信号INC的增量开始时刻It0从磁尺2和磁传感器装置3从第一绝对值输出时刻At0起相对移动了第一节距P1的1/4节距的时刻(基准增量开始时刻I0)偏移的相位的偏移量E。
接着,增量信号修正部43基于所获取的偏移量E,生成修正了增量信号INC的相位偏移的修正增量信号C_INC(步骤ST2)。修正增量信号C_INC的增量开始时刻与基准增量开始时刻I0一致。
在此,当生成修正增量信号C_INC时,计算部44使用修正增量信号C_INC计算绝对位置(步骤ST3)。
更具体而言,如图4(c)所示,增量信号修正部43基于第一绝对值ABS1和第二绝对值ABS2从相同的值变化为不同的值的第一时刻t0的增量信号INC的第一值INC1、及接着第一时刻t0的第一绝对值ABS1和第二绝对值ABS2返回相同的值的第二时刻t2的增量信号INC的第二值INC2获取偏移量E。
即,在增量开始时刻It0与基准增量开始时刻I0(磁尺2和磁传感器装置3从第一绝对值输出时刻At0起相对移动了第一节距P1的1/4节距的时刻)一致的情况下,重新获取第一绝对值ABS1的时刻为第一绝对值ABS1和第二绝对值ABS2从相同的值变化为不同的值的第一时刻t0与接着第一时刻t0的第一绝对值ABS1和第二绝对值ABS2返回相同的值的第二时刻t2的中央的时刻。因此,第一绝对值ABS1和第二绝对值ABS2从相同的值变化为不同的值的第一时刻t0的增量信号INC的第一值INC1与最大值的差值(距离D1)、和接着第一时刻t0的第一绝对值ABS1和第二绝对值ABS2返回相同的值的第二时刻t2的增量信号INC的第二值INC2(从零到第二值INC2的距离D2)一致。
另一方面,如图4(b)、图4(c)所示,在增量开始时刻It0从基准增量开始时刻I0(磁尺2和磁传感器装置3从第一绝对值输出时刻At0起相对移动了第一节距P1的1/4节距的时刻)偏移的情况下,第一绝对值ABS1和第二绝对值ABS2从相同的值变化为不同的值的第一时刻t0的增量信号INC的第一值INC1与最大值的差值(距离D1)、和接着第一时刻t0的第一绝对值ABS1和第二绝对值ABS2返回相同的值的第二时刻t2的增量信号INC的第二值INC2(距离D2)成为不同的值。另外,增量信号INC的第一值INC1与最大值的差值(距离D1)和第二值INC2(从零到第二值INC2的距离D2)之差相当于第一绝对值输出时刻At0和增量信号INC的相位的偏移量E。
因此,如图4(d)的箭头所示,增量信号修正部43生成使增量信号INC的相位偏移了相当于偏移量E的量的修正增量信号C_INC。由此,修正增量信号C_INC中的增量开始时刻与基准增量开始时刻I0一致。增量信号INC和修正增量信号C_INC仅相位偏移,均从零到最大值(8000)计数。
此外,在增量开始时刻It0相对于基准增量开始时刻I0未偏移的情况下,偏移量E为零。因此,增量信号修正部43将增量信号INC直接作为修正增量信号C_INC,以不使增量信号INC的相位偏移。
在此,增量信号修正部43进行的偏移量E的获取在将磁传感器装置3配置于固定体侧并将磁尺2配置于移动体侧的磁式编码器装置1的设置时进行。即,在设置时,当使移动体相对于固定体移动而使磁尺2和磁传感器装置3相对移动时,增量信号修正部43获取第一时刻t0的增量信号INC的第一值INC1和最大值的差值(距离D1)以及第二时刻t2的增量信号INC的第二值INC2(从零到第二值INC2的距离D2),算出偏移量E。然后,增量信号修正部43基于设置时所获取的偏移量E,生成修正增量信号C_INC。
接着,计算部44基于第一绝对值ABS1及第二绝对值ABS2以及修正增量信号C_INC计算绝对位置。具体而言,在计算部44,在从修正增量信号C_INC为0的时刻到修正增量信号C_INC达到零和最大值的中央的中央值的第一期间T1,绝对位置的计算使用第一绝对值ABS1,在从修正增量信号C_INC达到中央值至修正增量信号C_INC达到最大值的第二期间T2,绝对位置的计算使用第二绝对值ABS2。
在本例中,修正增量信号C_INC的最大值为8000。因此,中央值为4000。因此,在计算部44计算绝对位置的图5的步骤ST3中,计算部44在计算绝对位置时,监视修正增量信号C_INC的值(步骤ST11),在修正增量信号C_INC的值从0达到4000的第一期间T1(步骤ST11:是),使用从第一绝对磁道21的第一绝对图案21a获取的第一绝对值ABS1,基于该第一绝对值ABS1和修正增量信号C_INC的值(相位),计算绝对位置(步骤S12)。另一方面,在从修正增量信号C_INC的值为4000到修正增量信号C_INC的值达到8000的第二期间T2(步骤ST11:否),计算部44使用从第二绝对磁道22的第二绝对图案22a获取的第二绝对值ABS2,基于该第二绝对值ABS2和修正增量信号C_INC的值(相位),计算绝对位置(步骤ST13)。即,计算部44如图4(b)中箭头所示在计算绝对位置时,在每移动第二节距P2时,交替切换使用第一绝对值ABS1和第二绝对值ABS2。
(作用效果)
本例的磁式编码器装置1在由于磁传感器装置3的设置姿势相对于磁尺2的相对移动方向(X方向)倾斜等,增量信号INC的增量开始时刻It0相对于预先设定的基准增量开始时刻I0偏移的情况下,基于该偏移量E,生成修正了增量信号INC的相位偏移的修正增量信号C_INC。另外,在绝对位置的计算中,使用修正增量信号C_INC。因此,通过计算部44计算出的绝对位置为正确的值。
另外,在本例的磁式编码器装置1中,在计算绝对位置时,能够使用准确的绝对值。
即,在第一绝对磁道21及第二绝对磁道22的绝对图案21a、22a中,在存在于每个第一节距P1的各图案区域的边界B(参照图4(a)、图4(b)),磁场不稳定。因此,在计算部44计算绝对位置时,当作为绝对值使用通过利用磁阻元件检测各图案区域的边界B而获得的绝对值时,产生绝对值不准确的情况。如果绝对值不准确,则不能准确地计算绝对位置。
针对这样的问题,在本例中,在绝对磁道15中,用于获取第一绝对值ABS1的第一绝对磁道21的第一绝对图案21a和用于获取第二绝对值ABS2的第二绝对磁道22的第二绝对图案22a在磁尺2和磁传感器装置3的X方向上错开一半节距(第二节距P2)。另外,增量信号INC从磁尺2和磁传感器装置3从第一绝对值输出时刻At0起相对移动了第一节距P1的1/4节距的时刻开始增量。而且,计算部44在进行绝对位置的计算时,在修正增量信号C_INC的值从0达到4000的第一期间T1,使用从第一绝对磁道21的第一绝对图案21a获取的第一绝对值ABS1,基于该第一绝对值ABS1和修正增量信号C_INC的值(相位)计算绝对位置。另一方面,在从修正增量信号C_INC的值为4000到修正增量信号C_INC的值达到8000的第二期间T2,计算部44使用从第二绝对磁道22的第二绝对图案22a获取的第二绝对值ABS2。
因此,如图4(b)及图4(d)所示,计算部44在计算绝对位置时,不使用通过检测在第一绝对磁道21的第一绝对图案21a中存在于每个第一节距P1的各图案区域的边界B而获取的第一绝对值ABS1。同样,计算部44在计算绝对位置时,也不使用通过检测在第二绝对磁道22的第二绝对图案22a中存在于每个第一节距P1的各图案区域的边界B而获取的第二绝对值ABS2。因此,在计算部44,绝对位置的计算能够使用准确的绝对值(第一绝对值ABS1或第二绝对值ABS2)。
另外,在本例中,第一、第二增量磁道17、18分别具备在X方向上以第二节距P2交替磁化出N极和S极的增量图案17a、18a。因此,易于使重新获取绝对值的周期和增量信号INC的周期一致。
另外,本例的磁式编码器装置1在由于磁传感器装置3的设置姿势相对于磁尺2的相对移动方向(X方向)倾斜等,增量信号INC的增量开始时刻It0相对于预先设定的基准增量开始时刻I0偏移的情况下,基于该偏移量E,生成修正了增量信号INC的相位偏移的修正增量信号C_INC,使用修正增量信号C_INC计算绝对位置。因此,在设置磁式编码器装置1时,无需严格规定磁尺2和磁传感器装置3的位置关系。因此,磁式编码器装置1的设置作业变得容易。
(变形例)
如图4(c)所示,增量信号修正部43也可以基于第一绝对值ABS1和第二绝对值ABS2从不同的值变化为相同的值的第三时刻t3的增量信号INC的第三值INC3、及接着第三时刻t3的第一绝对值ABS1和第二绝对值ABS2返回不同的值的第四时刻t4的增量信号INC的第四值INC4,获取偏移量E。
该情况下,第一绝对值ABS1和第二绝对值ABS2从不同的值变化为相同的值的第一时刻t0的增量信号INC的第一值INC1与中央值的差值(距离D3)、和接着第一时刻t0的第一绝对值ABS1和第二绝对值ABS2返回不同的值的第二时刻t2的增量信号INC的第二值INC2与中央值的差值(距离D4)之差相当于第一绝对值输出时刻At0和增量信号INC的相位的偏移量E。
(其它实施方式)
此外,在磁式编码器装置1中,增量信号输出部39检测两条增量磁道17、18并输出增量信号,但也可以采用从一条增量磁道输出增量信号的结构。
另外,在磁式编码器装置1中,增量信号输出部39输出的增量信号也可以是游标信号。该情况下,在磁尺上设有形成有节距不同的增量图案的两个增量磁道,利用磁传感器装置的增量信号获取用的感磁元件13获取波长不同的两个增量信号。而且,在增量信号输出部39,基于所获取的两个增量信号生成并输出比这些增量信号的周期长的游标信号。
在此,游标信号的周期设定为与绝对图案的第一节距P对应的周期。另外,游标信号从磁尺2和磁传感器装置3从第一绝对值输出部37输出新的第一绝对值ABS1的第一绝对值输出时刻起相对移动了第一节距P的1/4节距的时刻开始增量。
Claims (6)
1.一种位置检测装置,其具有磁尺和磁传感器装置,
所述磁尺具备:具有磁化区域和非磁化区域以第一节距排列而成的绝对图案的绝对磁道;以及具有磁化区域和非磁化区域交替排列而成的增量图案且与所述绝对磁道并排设置的增量磁道,
所述磁传感器装置具备:读取相对移动的所述磁尺的所述绝对磁道并输出绝对值的绝对值输出部;读取相对移动的所述磁尺的所述增量磁道并输出从零变化到规定的最大值的周期性的增量信号的增量信号输出部;以及基于所述绝对值及所述增量信号计算绝对位置的计算部,
所述位置检测装置的特征在于,
所述位置检测装置具有修正所述增量信号的增量信号修正部,
所述增量信号修正部获取实际的所述增量信号的增量开始时刻相对于作为所述增量信号开始增量的增量开始时刻而预先设定的基准增量开始时刻偏移的偏移量,基于所述偏移量生成修正了所述增量信号的相位偏移的修正增量信号,
所述计算部在所述绝对位置的计算中使用所述修正增量信号,
所述绝对磁道具备:第一磁道,其具有所述绝对图案;以及第二磁道,其具有相对于所述第一磁道在相对移动方向上偏移了第二节距的所述绝对图案,且与所述第一磁道并排设置,所述第二节距是所述第一节距的一半,
所述绝对值输出部具备读取所述第一磁道并输出第一绝对值的第一绝对值输出部和读取所述第二磁道并输出第二绝对值的第二绝对值输出部,
所述基准增量开始时刻是所述磁尺和所述磁传感器装置从所述第一绝对值输出部输出新的所述绝对值的第一绝对值输出时刻起相对移动了所述第一节距的1/4节距的时刻,
从所述修正增量信号为0的时刻到该修正增量信号达到零和所述最大值的中央的中央值,所述计算部在所述绝对位置的计算中使用所述第一绝对值,从所述修正增量信号达到所述中央值的时刻到所述修正增量信号达到所述最大值,所述计算部在所述绝对位置的计算中使用所述第二绝对值,
所述增量信号修正部基于所述第一绝对值和所述第二绝对值从相同的值变化为不同的值的第一时刻的所述增量信号的第一值以及接着所述第一时刻的所述第一绝对值和所述第二绝对值返回相同的值的第二时刻的所述增量信号的第二值,获取所述偏移量。
2.一种位置检测装置,其具有磁尺和磁传感器装置,
所述磁尺具备:具有磁化区域和非磁化区域以第一节距排列而成的绝对图案的绝对磁道;以及具有磁化区域和非磁化区域交替排列而成的增量图案且与所述绝对磁道并排设置的增量磁道,
所述磁传感器装置具备:读取相对移动的所述磁尺的所述绝对磁道并输出绝对值的绝对值输出部;读取相对移动的所述磁尺的所述增量磁道并输出从零变化到规定的最大值的周期性的增量信号的增量信号输出部;以及基于所述绝对值及所述增量信号计算绝对位置的计算部,
所述位置检测装置的特征在于,
所述位置检测装置具有修正所述增量信号的增量信号修正部,
所述增量信号修正部获取实际的所述增量信号的增量开始时刻相对于作为所述增量信号开始增量的增量开始时刻而预先设定的基准增量开始时刻偏移的偏移量,基于所述偏移量生成修正了所述增量信号的相位偏移的修正增量信号,
所述计算部在所述绝对位置的计算中使用所述修正增量信号,
所述绝对磁道具备:第一磁道,其具有所述绝对图案;以及第二磁道,其具有相对于所述第一磁道在相对移动方向上偏移了第二节距的所述绝对图案,且与所述第一磁道并排设置,所述第二节距是所述第一节距的一半,
所述绝对值输出部具备读取所述第一磁道并输出第一绝对值的第一绝对值输出部和读取所述第二磁道并输出第二绝对值的第二绝对值输出部,
所述基准增量开始时刻是所述磁尺和所述磁传感器装置从所述第一绝对值输出部输出新的所述绝对值的第一绝对值输出时刻起相对移动了所述第一节距的1/4节距的时刻,
从所述修正增量信号为0的时刻到该修正增量信号达到零和所述最大值的中央的中央值,所述计算部在所述绝对位置的计算中使用所述第一绝对值,从所述修正增量信号达到所述中央值的时刻到所述修正增量信号达到所述最大值,所述计算部在所述绝对位置的计算中使用所述第二绝对值,
所述增量信号修正部基于所述第一绝对值和所述第二绝对值从不同的值变化为相同的值的第三时刻的所述增量信号的第三值以及接着所述第三时刻的所述第一绝对值和所述第二绝对值返回不同的值的第四时刻的所述增量信号的第四值,获取所述偏移量。
3.根据权利要求1或2所述的位置检测装置,其特征在于,
所述增量磁道具备在所述相对移动方向上以所述第二节距交替磁化出N极和S极的增量图案。
4.一种位置检测方法,是位置检测装置的位置检测方法,所述位置检测装置具有磁尺和磁传感器装置,
所述磁尺具备:具有磁化区域和非磁化区域以第一节距排列而成的绝对图案的绝对磁道;以及具有磁化区域和非磁化区域交替排列而成的增量图案且与所述绝对磁道并排设置的增量磁道,
所述磁传感器装置具备:读取相对移动的所述磁尺的所述绝对磁道并输出绝对值的绝对值输出部;以及读取相对移动的所述磁尺的所述增量磁道并输出从零变化到规定的最大值的周期性的增量信号的增量信号输出部,
所述位置检测装置基于所述绝对值及所述增量信号计算绝对位置,
所述位置检测方法的特征在于,
将所述增量信号开始增量的增量开始时刻预先设定为基准增量开始时刻,
获取实际的所述增量信号的增量开始时刻相对于所述基准增量开始时刻偏移的偏移量,
基于所述偏移量生成修正了所述增量信号的相位偏移的修正增量信号,
所述绝对位置的计算使用所述修正增量信号,
作为所述绝对磁道,预先具备:第一磁道,其具有所述绝对图案;以及第二磁道,其具有相对于所述第一磁道在相对移动方向上偏移了第二节距的所述绝对图案,且与所述第一磁道并排设置,所述第二节距是所述第一节距的一半,
并且,作为所述绝对值输出部,预先具备读取所述第一磁道并输出第一绝对值的第一绝对值输出部和读取所述第二磁道并输出第二绝对值的第二绝对值输出部,
将所述基准增量开始时刻设定为:所述磁尺和所述磁传感器装置从所述第一绝对值输出部输出新的所述绝对值的第一绝对值输出时刻起相对移动了所述第一节距的1/4节距的时刻,
从所述修正增量信号为0的时刻到该修正增量信号达到零和所述最大值的中央的中央值,所述绝对位置的计算使用所述第一绝对值,从所述修正增量信号为所述中央值的时刻到所述修正增量信号达到所述最大值,所述绝对位置的计算使用所述第二绝对值,
基于所述第一绝对值和所述第二绝对值从相同的值变化为不同的值的第一时刻的所述增量信号的第一值以及接着所述第一时刻的所述第一绝对值和所述第二绝对值返回相同的值的第二时刻的所述增量信号的第二值,获取所述偏移量。
5.一种位置检测方法,是位置检测装置的位置检测方法,所述位置检测装置具有磁尺和磁传感器装置,
所述磁尺具备:具有磁化区域和非磁化区域以第一节距排列而成的绝对图案的绝对磁道;以及具有磁化区域和非磁化区域交替排列而成的增量图案且与所述绝对磁道并排设置的增量磁道,
所述磁传感器装置具备:读取相对移动的所述磁尺的所述绝对磁道并输出绝对值的绝对值输出部;以及读取相对移动的所述磁尺的所述增量磁道并输出从零变化到规定的最大值的周期性的增量信号的增量信号输出部,
所述位置检测装置基于所述绝对值及所述增量信号计算绝对位置,
所述位置检测方法的特征在于,
将所述增量信号开始增量的增量开始时刻预先设定为基准增量开始时刻,
获取实际的所述增量信号的增量开始时刻相对于所述基准增量开始时刻偏移的偏移量,
基于所述偏移量生成修正了所述增量信号的相位偏移的修正增量信号,
所述绝对位置的计算使用所述修正增量信号,
作为所述绝对磁道,预先具备:第一磁道,其具有所述绝对图案;以及第二磁道,其具有相对于所述第一磁道在相对移动方向上偏移了第二节距的所述绝对图案,且与所述第一磁道并排设置,所述第二节距是所述第一节距的一半,
并且,作为所述绝对值输出部,预先具备读取所述第一磁道并输出第一绝对值的第一绝对值输出部和读取所述第二磁道并输出第二绝对值的第二绝对值输出部,
将所述基准增量开始时刻设定为:所述磁尺和所述磁传感器装置从所述第一绝对值输出部输出新的所述绝对值的第一绝对值输出时刻起相对移动了所述第一节距的1/4节距的时刻,
从所述修正增量信号为0的时刻到该修正增量信号达到零和所述最大值的中央的中央值,所述绝对位置的计算使用所述第一绝对值,从所述修正增量信号为所述中央值的时刻到所述修正增量信号达到所述最大值,所述绝对位置的计算使用所述第二绝对值,
基于所述第一绝对值和所述第二绝对值从不同的值变化为相同的值的第三时刻的所述增量信号的第三值以及接着所述第三时刻的所述第一绝对值和所述第二绝对值返回不同的值的第四时刻的所述增量信号的第四值,获取所述偏移量。
6.根据权利要求4或5所述的位置检测方法,其特征在于,
在所述增量磁道具备在所述相对移动方向上以所述第二节距交替磁化出N极和S极的增量图案。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018020136A JP7085852B2 (ja) | 2018-02-07 | 2018-02-07 | 位置検出装置および位置検出方法 |
| JP2018-020136 | 2018-02-07 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110118552A CN110118552A (zh) | 2019-08-13 |
| CN110118552B true CN110118552B (zh) | 2023-06-16 |
Family
ID=67520372
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910083033.XA Active CN110118552B (zh) | 2018-02-07 | 2019-01-28 | 位置检测装置及位置检测方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7085852B2 (zh) |
| CN (1) | CN110118552B (zh) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7527211B2 (ja) * | 2021-01-20 | 2024-08-02 | ニデックインスツルメンツ株式会社 | 位置検出装置 |
| JP7587433B2 (ja) * | 2021-02-03 | 2024-11-20 | ニデックインスツルメンツ株式会社 | 位置検出装置 |
| JP7688518B2 (ja) * | 2021-05-24 | 2025-06-04 | Dmg森精機株式会社 | 磁気エンコーダ |
| JP7834464B2 (ja) | 2021-12-13 | 2026-03-24 | キヤノン株式会社 | 搬送装置 |
| CN116659468A (zh) * | 2022-02-25 | 2023-08-29 | 住友重机械工业株式会社 | 测位切换装置、驱动装置及测位切换方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2571394B2 (ja) * | 1987-09-21 | 1997-01-16 | 株式会社マコメ研究所 | 絶対値型磁気スケール装置 |
| JPH0353114A (ja) * | 1989-07-21 | 1991-03-07 | Sony Magnescale Inc | 位置検出装置 |
| JPH05168275A (ja) * | 1991-12-10 | 1993-07-02 | Nikon Corp | 三相交流モーター制御装置 |
| JP2004150882A (ja) * | 2002-10-29 | 2004-05-27 | Koyo Seiko Co Ltd | 回転角検出装置およびトルク検出装置 |
| FR2935486B1 (fr) * | 2008-08-28 | 2010-09-10 | Roulements Soc Nouvelle | Dispositif de codage magnetique |
| JP6168776B2 (ja) * | 2013-01-11 | 2017-07-26 | キヤノン株式会社 | 位置制御装置及び位置制御方法 |
| JP2015114209A (ja) * | 2013-12-12 | 2015-06-22 | セイコーエプソン株式会社 | エンコーダー及び電気機械装置 |
| JP2016038294A (ja) * | 2014-08-07 | 2016-03-22 | 日本電産サンキョー株式会社 | 磁気式リニアエンコーダ |
| JP6487246B2 (ja) * | 2015-03-26 | 2019-03-20 | 三菱重工工作機械株式会社 | 電磁誘導式位置検出器及びそれを用いた位置検出方法 |
| JP6649018B2 (ja) * | 2015-09-16 | 2020-02-19 | 日本電産サンキョー株式会社 | ロータリエンコーダ、およびロータリエンコーダの絶対角度位置検出方法 |
-
2018
- 2018-02-07 JP JP2018020136A patent/JP7085852B2/ja active Active
-
2019
- 2019-01-28 CN CN201910083033.XA patent/CN110118552B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP7085852B2 (ja) | 2022-06-17 |
| CN110118552A (zh) | 2019-08-13 |
| JP2019138694A (ja) | 2019-08-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110118552B (zh) | 位置检测装置及位置检测方法 | |
| EP2999943B1 (en) | System and method for providing signal encoding representative of a signature region in a target and of a direction of rotation | |
| CN108426588B (zh) | 旋转编码器及其绝对角度位置检测方法 | |
| CN102341675B (zh) | 编码器读取头 | |
| CN105143831B (zh) | 磁气式位置检测装置及磁气式位置检测方法 | |
| CN104105951B (zh) | 用于确定位置的方法和装置 | |
| US9958294B2 (en) | Absolute position encoder including scale with varying spatial characteristic and utilizing Fourier transform or other signal processing | |
| CN101743456B (zh) | 用于绝对确定线性位置或通过角度表示的旋转位置的装置和方法 | |
| CN110030924B (zh) | 位置测量装置 | |
| US20190120660A1 (en) | Compact pseudorandom scale and read head for an inductive type absolute position encoder | |
| CN108369113A (zh) | 位置检测装置 | |
| CN110118551B (zh) | 位置检测装置及位置检测方法 | |
| Lin et al. | Novel method for determining absolute position information from magnetic patterns | |
| CN109708673B (zh) | 基于码型的分离式磁编码器 | |
| CN102818511B (zh) | 线性位置测量系统和确定车厢沿着导轨的绝对位置的方法 | |
| JP6334892B2 (ja) | 位置検出装置及びそれを有するレンズ装置及び撮影装置 | |
| CN114812625B (zh) | 位置检测装置 | |
| CN116465437A (zh) | 位置传感器系统和用于检测位置传感器系统的误差的方法 | |
| CN114667438A (zh) | 位置测量装置 | |
| US20250093144A1 (en) | Inductive position determination system with varying coil geometry, and corresponding position determination method | |
| JP2024075149A (ja) | 変位検出装置 | |
| JP2024006069A (ja) | マルチセンサー位置計測システム | |
| WO2022185777A1 (ja) | 変位検出装置 | |
| JPS63309868A (ja) | 位相弁別回路 | |
| JP2016217782A (ja) | 位置検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |