CN109219414B - 机器人手术组合件 - Google Patents
机器人手术组合件 Download PDFInfo
- Publication number
- CN109219414B CN109219414B CN201780030972.7A CN201780030972A CN109219414B CN 109219414 B CN109219414 B CN 109219414B CN 201780030972 A CN201780030972 A CN 201780030972A CN 109219414 B CN109219414 B CN 109219414B
- Authority
- CN
- China
- Prior art keywords
- assembly
- drive
- surgical instrument
- robotic surgical
- instrument
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/35—Surgical robots for telesurgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Master-slave robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/76—Manipulators having means for providing feel, e.g. force or tactile feedback
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B46/00—Surgical drapes
- A61B46/10—Surgical drapes specially adapted for instruments, e.g. microscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B46/00—Surgical drapes
- A61B46/20—Surgical drapes specially adapted for patients
- A61B46/23—Surgical drapes specially adapted for patients with means to retain or hold surgical implements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/90—Identification means for patients or instruments, e.g. tags
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/90—Identification means for patients or instruments, e.g. tags
- A61B90/98—Identification means for patients or instruments, e.g. tags using electromagnetic means, e.g. transponders
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0019—End effectors other than grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/04—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/04—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof
- B25J15/0408—Connections means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0025—Means for supplying energy to the end effector
- B25J19/0029—Means for supplying energy to the end effector arranged within the different robot elements
- B25J19/0041—Means for supplying energy to the end effector arranged within the different robot elements having rotary connection means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0009—Constructional details, e.g. manipulator supports, bases
- B25J9/0021—All motors in base
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0009—Constructional details, e.g. manipulator supports, bases
- B25J9/0024—Wrist motors at rear part of the upper arm
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/02—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/04—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type by rotating at least one arm, excluding the head movement itself, e.g. cylindrical coordinate type or polar coordinate type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/102—Gears specially adapted therefor, e.g. reduction gears
- B25J9/1035—Pinion and fixed rack drivers, e.g. for rotating an upper arm support on the robot base
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/104—Programme-controlled manipulators characterised by positioning means for manipulator elements with cables, chains or ribbons
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/104—Programme-controlled manipulators characterised by positioning means for manipulator elements with cables, chains or ribbons
- B25J9/1045—Programme-controlled manipulators characterised by positioning means for manipulator elements with cables, chains or ribbons comprising tensioning means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/108—Bearings specially adapted therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
- A61B2017/00389—Button or wheel for performing multiple functions, e.g. rotation of shaft and end effector
- A61B2017/00393—Button or wheel for performing multiple functions, e.g. rotation of shaft and end effector with means for switching between functions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
- A61B2017/00411—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like actuated by application of energy from an energy source outside the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00836—Material properties corrosion-resistant
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/0084—Material properties low friction
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00853—Material properties low friction, hydrophobic and corrosion-resistant fluorocarbon resin coating (ptf, ptfe, polytetrafluoroethylene)
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00929—Material properties isolating electrical current
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/00172—Connectors and adapters therefor
- A61B2018/00178—Electrical connectors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/301—Surgical robots for introducing or steering flexible instruments inserted into the body, e.g. catheters or endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/302—Surgical robots specifically adapted for manipulations within body cavities, e.g. within abdominal or thoracic cavities
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
- A61B2034/715—Cable tensioning mechanisms for removing slack
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0807—Indication means
- A61B2090/0811—Indication means for the position of a particular part of an instrument with respect to the rest of the instrument, e.g. position of the anvil of a stapling instrument
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B46/00—Surgical drapes
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Robotics (AREA)
- Animal Behavior & Ethology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Mechanical Engineering (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Pathology (AREA)
- Physics & Mathematics (AREA)
- Plasma & Fusion (AREA)
- Otolaryngology (AREA)
- Electromagnetism (AREA)
- Manipulator (AREA)
- Surgical Instruments (AREA)
Abstract
提供了一种用于将机电机器人手术器械联接到机器人手术组合件的无菌接口模块。所述手术器械包含末端执行器并且被配置成由所述机器人手术组合件致动。所述无菌接口模块包含主体构件和驱动组合件。所述主体构件被配置成将所述手术器械选择性地联接到所述机器人手术组合件。所述主体构件是由介电材料形成。所述驱动组合件被支撑在所述主体构件内并且被配置成将旋转力从所述机器人手术组合件传递到所述手术器械以致动所述手术器械,从而使得所述手术器械能够执行功能。
Description
相关申请的交叉引用
本申请要求2016年5月26日提交的美国临时申请第62/341,714号;2016年5月26日提交的美国临时申请第62/341,701号;2016年5月26日提交的美国临时申请第62/341,720号;2016年5月26日提交的美国临时申请第62/341,748号;2016年5月26日提交的美国临时申请第62/341,761号;2016年5月26日提交的美国临时申请第62/341,774号;和2016年5月26日提交的美国临时申请第62/341,804号中的每个的权益和优先权,其中的每个申请的全部内容以引用的方式并入本文中。
背景技术
机器人手术系统已用于微创医疗程序。一些机器人手术系统包括支撑手术机器人臂和手术器械、具有至少一个安装到机器人臂的末端执行器(例如,钳或抓握工具)的控制台。机器人臂为手术器械提供机械动力以用于其操作和移动。每个机器人臂可包括以操作方式连接到手术器械的器械驱动单元。
手动操作的手术器械通常包括用于致动手术器械的功能的手柄组合件。然而,当使用机器人手术系统时,通常不存在手柄组合件以致动末端执行器的功能。因此,为了使用具有机器人手术系统的每个独特手术器械,使用器械驱动单元以与所选择的手术器械介接以驱动手术器械的操作。在机器人手术系统中,机器人臂可用于保持手术器械。在一些机器人手术系统中,手术器械的细长轴的整个长度必须穿过机器人臂的保持器或其它特征部,由此使手术器械的移除或更换繁琐。
因此,需要能够更高效和迅捷移除或更换手术器械的机器人手术系统。
另外需要其中手术器械的旋转轴线相比于在手术器械本身内出现在机器人手术组合件的机器人臂中的机器人手术系统。以此方式,手术器械的构造和组合件简化并且更有成本效益。
另外,需要具有改进和提高可用性的机器人手术系统。举例来说,此外需要在急救情况下可手动控制的机器人手术系统。
发明内容
根据本公开的一方面,提供机器人手术系统。机器人手术系统包括机器人臂、耦合到机器人臂的托架、驱动带和通过托架支撑的马达。托架可旋转地支撑器械旋转滑轮和马达轴线滑轮。驱动带耦合到器械旋转滑轮和马达轴线滑轮。马达通过托架支撑并且包括在致动马达时通过马达驱动的耦合件。耦合件与马达轴线滑轮接合,使得马达轴线滑轮的旋转使驱动带旋转以使器械旋转滑轮旋转。
在一些实施例中,机器人手术系统可包括被配置成耦合到托架的手术器械。手术器械可可操作地耦合到器械旋转滑轮,使得器械旋转滑轮的旋转使手术器械旋转。
机器人手术系统可包含包括被配置成耦合到手术器械的驱动传送组合件的无菌屏障外壳。无菌屏障外壳可包括盖。盖可为可移除的以暴露限定在无菌屏障外壳内的内腔。腔可被配置成在其中选择性地接收马达组。
在某些实施例中,机器人手术系统可进一步包含被配置成耦合到驱动传送组合件的无菌屏障轴环组合件。无菌屏障轴环组合件可被配置成在手术器械耦合到驱动传送组合件时,支撑手术器械。驱动传送组合件和无菌屏障轴环组合件可响应于器械旋转滑轮的旋转一起旋转,使得手术器械在耦合到无菌屏障轴环组合件时沿其纵向轴线旋转。
机器人手术系统可进一步包含支撑在无菌屏障外壳中的马达组。马达组可随驱动传送组合件相对于无菌屏障外壳旋转。
在一些实施例中,机器人手术系统可进一步包括可操作地耦合到驱动带的张紧滑轮。
根据本公开的另一方面,机器人手术系统包括手术器械、器械驱动单元和在手术器械耦合到器械驱动单元时支撑器械驱动单元和手术器械的托架。手术器械限定在其近侧和远侧末端之间的纵向轴线。器械驱动单元可被配置成在手术器械耦合到器械驱动单元时,将旋转力传输到手术器械。
托架包括器械旋转滑轮、马达轴线滑轮、耦合到器械旋转滑轮和马达轴线滑轮的驱动带,和耦合件。耦合件可与马达轴线滑轮接合,使得耦合件的旋转使驱动带围绕器械旋转滑轮和马达轴线滑轮旋转,以使手术器械围绕手术器械的纵向轴线旋转。
在一些实施例中,机器人手术系统可包括支撑轨的机器人臂。托架可可移动地安装到机器人臂的轨。托架可包括耦合到轨的后面板和从后面板延伸的耦合凸缘。耦合凸缘可可旋转地支撑器械旋转滑轮。
在某些实施例中,器械驱动单元可包括具有从其延伸的驱动传送组合件的无菌屏障外壳。驱动传送组合件可被配置成耦合到手术器械。无菌屏障外壳可包括盖。盖可为可移除的以暴露限定在无菌屏障外壳内的内腔。腔可被配置成在其中选择性地接收马达组。
机器人手术系统可包括被配置成耦合到驱动传送组合件的无菌屏障轴环组合件。无菌屏障轴环组合件可被配置成在手术器械耦合到驱动传送组合件时,支撑手术器械。驱动传送组合件和无菌屏障轴环组合件可响应于器械旋转滑轮的旋转一起旋转,使得手术器械在耦合到无菌屏障轴环时旋转。
在一些实施例中,机器人手术系统可包括支撑在无菌屏障外壳中的马达组。马达组可被配置成接合驱动传送组合件,使得驱动传送组合件在马达组和手术器械之间提供无菌接口。马达组可随驱动传送组合件相对于无菌屏障外壳旋转。
在一些实施例中,托架进一步包括可操作地耦合到驱动带的张紧滑轮。
根据本公开的又一方面,机器人手术组合件包括托架、安装到托架的壳、可移除地可连接到壳的无菌屏障外壳和马达组。无菌屏障外壳可限定其中的腔并且可具有从其向向远侧延伸的驱动传送组合件。马达组可选择性地可接收在无菌屏障外壳的腔内并且可被配置成在接收在无菌屏障外壳的腔内时,与无菌屏障外壳的驱动传送组合件介接,以将来自马达组的旋转力传输到驱动传送组合件。驱动传送组合件被配置成将旋转力传输到耦合到驱动传送组合件的手术器械。
机器人手术组合件可包括可旋转地支撑在无菌屏障外壳上的锁定环。驱动传送组合件可相对于无菌屏障外壳可旋转,并且锁定环可支撑可被配置成耦合到驱动传送组合件的触感反馈环以提供关于驱动传送组合件的角定向的触感反馈。
在一些实施例中,无菌屏障外壳可包括可枢转地耦合到其的罩以选择性地封闭在腔内的马达组。
在某些实施例中,机器人手术组合件可进一步包括耦合到壳的无菌帷帘。无菌帷帘可为可定位的以建立无菌屏障。
机器人手术组合件可进一步包括机器人臂,所述机器人臂具有支撑在机器人臂上的轨。托架可沿轨轴向可移动。托架可包括可旋转地支撑器械旋转滑轮的耦合凸缘。器械旋转滑轮可限定通过其的开口。开口可限定用于驱动传送组合件的非旋转接收的键槽。
在一些实施例中,无菌屏障轴环组合件可被配置成耦合到驱动传送组合件。无菌屏障轴环组合件可被配置成在手术器械耦合到驱动传送组合件时,支撑手术器械。驱动传送组合件和无菌屏障轴环组合件可响应于器械旋转滑轮的旋转一起旋转,使得手术器械在耦合到无菌屏障轴环组合件时沿其纵向轴线旋转。
在某些实施例中,马达组可随驱动传送组合件相对于无菌屏障外壳旋转。
根据本公开的一个方面,机器人手术系统包括机器人臂、手术器械和耦合到机器人臂并且被配置成支撑手术器械的机器人手术组合件。
机器人手术组合件包括托架、安装到托架的壳、可连接到壳的无菌屏障外壳和通过无菌屏障外壳支撑的马达组。无菌屏障外壳可具有从其向远侧延伸的驱动传送组合件。马达组可被配置成与无菌屏障外壳的驱动传送组合件介接,以将来自马达组的旋转力传输到驱动传送组合件。驱动传送组合件可被配置成将旋转力传输到手术器械。
在某些实施例中,锁定环可可旋转地支撑在无菌屏障外壳上。驱动传送组合件可相对于无菌屏障外壳可旋转,并且锁定环可支撑被配置成耦合到驱动传送组合件的触感反馈环以提供关于驱动传送组合件的角定向的触感反馈。
在一些实施例中,无菌屏障外壳可包括可枢转地耦合到其的罩以选择性地封闭在腔内的马达组。
机器人手术系统可包括耦合到壳的无菌帷帘。无菌帷帘可为可定位的以建立无菌屏障。
在某些实施例中,机器人臂可包括轨和并且托架可沿轨轴向可移动。托架可包括可旋转地支撑限定通过其的开口的器械旋转滑轮的耦合凸缘。开口可限定用于驱动传送组合件的非旋转接收的键槽。
机器人手术系统可包括被配置成耦合到驱动传送组合件的无菌屏障轴环组合件。无菌屏障轴环组合件可被配置成在手术器械耦合到驱动传送组合件时,支撑手术器械。驱动传送组合件和无菌屏障轴环组合件可响应于器械旋转滑轮的旋转一起旋转,使得手术器械在耦合到无菌屏障轴环组合件时沿其纵向轴线旋转。马达组可随驱动传送组合件相对于无菌屏障外壳旋转。
根据本公开的再一方面,提供用于将电动机械机器人手术器械耦合到机器人手术组合件的无菌接口模块。手术器械包括末端执行器并且可被配置成通过机器人手术组合件致动。
无菌接口模块包括被配置成将手术器械选择性地耦合到机器人手术组合件的主体构件。主体构件可由介电材料形成。无菌接口模块可包括支撑在主体构件内的驱动组合件并且可被配置成将来自机器人手术组合件的旋转力传输到手术器械,以致动手术器械使得手术器械能够执行功能。
在一些实施例中,主体构件可支撑在机器人手术组合件和手术器械之间电通信信息的电连接器。主体构件可支撑被配置成将来自机器人手术组合件的电外科能量传输到手术器械的电外科连接构件。电外科连接构件可与电连接器电隔离。
在某些实施例中,驱动组合件可包括驱动耦合器和从驱动耦合器延伸的传送轴。驱动耦合器可与机器人手术组合件可接合,并且传送轴可与手术器械可接合。驱动耦合器和传送组合件可以机器人方式可移动以操作手术器械的末端执行器。
无菌接口模块可包括支撑在主体构件上的可旋转轴环。无菌接口模块可包括固定到可旋转轴环的环耦合器、固定到驱动组合件的传送轴的驱动耦合器和支撑在驱动耦合器和环耦合器之间的惰轮耦合器。在可旋转轴环在第一位置和第二位置之间旋转时,环耦合器可与惰轮耦合器选择性地可接合。
在一些实施例中,无菌接口模块可进一步包括耦合到主体构件的浮动板。浮动板可相对于主体构件可移动以有助于手术器械选择性连接到主体构件。浮动板可为偏置的弹簧。
在本公开的一个方面,机器人手术系统包括电动机械机器人手术器械、机器人手术组合件和无菌接口模块。无菌接口模块具有由介电材料形成的主体构件。主体构件可被配置成将手术器械选择性地耦合到机器人手术组合件以维持在机器人手术组合件和手术器械之间的无菌性。主体构件可支撑被配置成将来自机器人手术组合件的旋转力传输到手术器械以致动手术器械的驱动组合件。
无菌接口模块的主体构件可支撑在主体构件耦合到机器人手术组合件和手术器械时在机器人手术组合件和手术器械之间电通信信息的电连接器。无菌接口模块的主体构件可支撑被配置成将来自机器人手术组合件的电外科能量传输到手术器械的电外科连接构件。电外科连接构件可与电连接器电隔离。
在某些实施例中,手术器械可包括末端执行器。无菌接口模块的驱动组合件可包括驱动耦合器和从驱动耦合器延伸的传送轴。驱动耦合器可与机器人手术组合件可接合,并且传送轴可与手术器械可接合。驱动耦合器和传送组合件可以机器人方式可移动以操作手术器械的末端执行器。
在一些实施例中,无菌接口模块可包括支撑在无菌接口模块的主体构件上的可旋转轴环。无菌接口模块可包括固定到可旋转轴环的环耦合器、固定到驱动组合件的传送轴的驱动耦合器和支撑在驱动耦合器和环耦合器之间的惰轮耦合器。在可旋转轴环在第一位置和第二位置之间旋转时,环耦合器可与惰轮耦合器选择性地可接合。环耦合器可在第一和第二位置之间旋转以从机器人手术组合件选择性地解开驱动耦合器。可旋转轴环的旋转可引起可旋转轴环的轴向移动和在惰轮耦合器和可旋转轴环之间的选择性接合。
在某些实施例中,无菌接口模块可包括耦合到无菌接口模块的主体构件的浮动板。浮动板可相对于无菌接口模块的主体构件可移动以有助于手术器械选择性连接到无菌接口模块的主体构件。无菌接口模块的浮动板可为偏置的弹簧。
根据本公开的再一方面,提供用于耦合到被配置成将旋转力传送到手术器械的机器人手术组合件的手术器械。手术器械包括细长轴、耦合到细长轴的远侧末端的末端执行器和以操作方式耦合到末端执行器的驱动组合件。驱动组合件包括连接到末端执行器的一个或多个电缆,其中一个或多个电缆的移动致动末端执行器的移动。一个或多个电缆可涂布有聚对二甲苯。
在一些实施例中,一个或多个电缆可响应于从机器人手术组合件传输的旋转力可移动。
在某些实施例中,驱动组合件可包括支撑驱动螺母的驱动螺钉。在驱动螺钉旋转以移动一个或多个电缆时,驱动螺母可沿驱动螺钉轴向可移动。
手术器械可进一步包括以操作方式耦合到末端执行器的第二驱动组合件。第二驱动组合件可包括支撑第二驱动螺母的第二驱动螺钉,在第二驱动螺钉旋转时,所述第二驱动螺母沿第二驱动螺钉轴向可移动。第一和第二驱动螺母可被配置成在第一和第二驱动螺钉旋转时,在轴向相反方向上移动。
在一些实施例中,驱动组合件包括维持一个或多个电缆处于拉伸的偏置构件。
在某些实施例中,手术器械包括支撑在细长轴的近侧末端上的外壳。外壳可被配置成耦合到机器人手术组合件。外壳可包括支撑斜坡式凸轮表面的侧表面。斜坡式凸轮表面可被配置成使得外壳能够横向耦合到机器人手术组合件。外壳可支撑被配置成电耦合到机器人手术组合件的一个或多个电连接器,使得手术器械可与机器人手术组合件电通信。
在一些实施例中,一个或多个电缆可由钨形成。
根据本公开的一个方面,机器人手术器械包括被配置成耦合到机器人手术组合件的外壳、从外壳向远侧延伸的细长轴、从细长轴向远侧延伸的末端执行器和支撑在外壳中的驱动组合件。驱动组合件包括连接到末端执行器的电缆。电缆是可移动的以致动末端执行器。电缆可涂布有耐高压加热材料。
在外壳耦合到机器人手术组合件时,电缆可响应于从机器人手术组合件传输的旋转力可移动。
在一些实施例中,驱动组合件包括支撑驱动螺母的驱动螺钉。在驱动螺钉旋转以移动电缆时,驱动螺母可沿驱动螺钉轴向可移动。机器人手术器械可包括以操作方式耦合到末端执行器的第二驱动组合件。第二驱动组合件可包括支撑第二驱动螺母的第二驱动螺钉,在第二驱动螺钉旋转时,所述第二驱动螺母沿第二驱动螺钉轴向可移动。第一和第二驱动螺母可被配置成在第一和第二驱动螺钉旋转时,在轴向相反方向上移动。
在某些实施例中,驱动组合件包括维持一个或多个电缆处于拉伸的偏置构件。
在一些实施例中,耐高压加热材料可包括聚对二甲苯。电缆可由钨形成。
在某些实施例中,外壳包括支撑斜坡式凸轮表面的侧表面。斜坡式凸轮表面可被配置成使得外壳能够横向耦合到机器人手术组合件。外壳可支撑被配置成电耦合到机器人手术组合件的一个或多个电连接器,使得手术器械可与机器人手术组合件电通信。
根据本公开的另一方面,机器人手术系统包括手术器械和机器人手术组合件。机器人手术组合件限定器械开口并且包括浮动板和驱动组合件。浮动板可在延伸位置和压缩位置之间可移动。在浮动板安置在压缩位置时,手术器械可横向可接收在机器人手术组合件的器械开口中。在手术器械接收在机器人手术组合件的器械开口中时,浮动板可可移动到延伸位置以将手术器械耦合到机器人手术组合件。
在一些实施例中,浮动板包括从其延伸的一个或多个突片。一个或多个突片可被配置成接合手术器械以将浮动板从延伸位置移动到压缩位置。
在某些实施例中,驱动组合件可包括在浮动板安置在延伸位置时延伸到器械开口中的一个或多个耦合器。在浮动板从延伸位置移动到压缩位置时,浮动板可使一个或多个耦合器移动离开器械开口。手术器械可包括补充机器人手术组合件的一个或多个耦合器的一个或多个耦合器。机器人手术组合件的一个或多个耦合器可被配置成在浮动板处于延伸位置并且手术器械耦合到机器人手术组合件时,接合手术器械的一个或多个耦合器。
在一些实施例中,浮动板可为朝向延伸位置偏置的弹簧。
在某些实施例中,机器人手术组合件可包括限定器械开口的半环形耦合套箍。半环形耦合套箍可包括U形主体。耦合套箍可包括在耦合套箍的内表面上形成的斜坡式表面。斜坡式表面可被配置成接合在手术器械的外表面上形成的互补表面,使得耦合套箍的斜坡式表面支撑在器械开口中的手术器械。
在一些实施例中,手术器械可包括外壳和可枢转地连接到外壳的一个或多个桨。一个或多个桨可与浮动板可接合以将浮动板移动到压缩位置,使得手术器械可横向滑动通过器械开口。
根据本公开的再一方面,提供用于选择性接合到手术器械的机器人手术组合件。机器人手术组合件包括被配置成将旋转力传输到手术器械的驱动组合件、限定器械开口的半环形耦合套箍和浮动板。浮动板可在延伸位置和压缩位置之间可移动。耦合套箍可被配置成在浮动板处于压缩位置时,接收横向通过器械开口的手术器械。浮动板可从压缩位置可移动到延伸位置以将驱动组合件耦合到手术器械。
浮动板可包括从其延伸的一个或多个突片。一个或多个突片可被配置成接合手术器械以将浮动板从延伸位置移动到压缩位置。
在一些实施例中,驱动组合件可包括在浮动板安置在延伸位置时延伸到器械开口中的一个或多个耦合器。在浮动板从延伸位置移动到压缩位置时,浮动板可使一个或多个耦合器移动离开器械开口。一个或多个耦合器可被配置成在浮动板处于延伸位置时,接合手术器械。浮动板可为朝向延伸位置偏置的弹簧。
在一些实施例中,耦合套箍可包括U形主体。耦合套箍可包括在耦合套箍的内表面上形成的斜坡式表面。斜坡式表面可被配置成接合在手术器械的外表面上形成的互补表面,使得耦合套箍的斜坡式表面支撑在器械开口中的手术器械。
在某些实施例中,驱动组合件可耦合到致动驱动组合件的以机器人方式控制的马达组合件。
根据本公开的一个方面,提供用于将手术器械耦合到机器人手术组合件的无菌接口模块。手术器械包括末端执行器。
无菌接口模块包括被配置成将手术器械选择性地耦合到机器人手术组合件的主体构件。无菌接口模块进一步包括通过主体构件支撑的第一驱动传送组合件。第一驱动传送组合件包括驱动耦合器和从驱动耦合器延伸的传送轴。驱动耦合器可与机器人手术组合件可接合,并且传送轴可与手术器械可接合。驱动耦合器和传送组合件可以机器人方式可移动以操作手术器械的末端执行器。
可旋转轴环支撑在主体构件上并且可操作地与第一驱动传送组合件相关联。可旋转轴环可相对于主体构件手动可移动以手动操作手术器械的末端执行器。在可旋转轴环围绕主体构件旋转时,可旋转轴环可相对于主体构件轴向移动。
无菌接口模块可进一步包括固定到可旋转轴环的环耦合器。驱动耦合器可固定到第一驱动传送组合件的传送轴,并且惰轮耦合器可支撑在驱动耦合器和环耦合器之间。环耦合器可在可旋转轴环处于第一位置时与惰轮耦合器接合,并且在可旋转轴环处于第二位置时与惰轮耦合器隔开。在可旋转轴环旋转围绕主体构件时,环耦合器可使惰轮耦合器旋转。惰轮耦合器的旋转可使驱动耦合器旋转以使传送轴旋转。
在一些实施例中,第二驱动传送组合件被配置成结合第一驱动传送组合件操作手术器械的末端执行器。在可旋转轴环相对于主体构件移动时,第一驱动传送组合件可独立于第二驱动传送组合件可旋转。在可旋转轴环相对于主体构件旋转时,第二驱动传送组合件可被配置成保持静止。
在某些实施例中,浮动板可耦合到主体构件,并且弹簧可安放在驱动耦合器和传送轴之间。浮动板可随传送轴相对于主体构件在近侧方向上可移动以有助于将手术器械从主体构件选择性移除。弹簧可被配置成在远侧方向上偏置浮动板。
根据本公开的另一方面,机器人手术系统包括包括末端执行器的手术器械、机器人手术组合件和可定位在机器人手术组合件和手术器械之间以将手术器械耦合到机器人手术组合件的无菌接口模块。
根据本公开的另一方面,提供用于手动操作耦合到机器人手术组合件的手术器械的末端执行器的方法。方法包括旋转无菌接口模块的可旋转轴环以相对于惰轮耦合器轴向移动环耦合器,选择性地接合环耦合器与惰轮耦合器,在环耦合器与惰轮耦合器接合时随环耦合器旋转惰轮耦合器以手动旋转第一驱动传送组合件;和响应于第一驱动传送组合件的手动旋转,操控手术器械的末端执行器。
方法可包括轴向隔开环耦合器与惰轮耦合器以从惰轮耦合器解开环耦合器。方法可包括独立于第二驱动传送组合件手动旋转第一驱动传送组合件。
根据本公开的一方面,提供手术器械保持器。手术器械保持器包括托架、外壳和驱动组合件。托架被配置成用于接合到手术机器人臂并且用于支撑器械驱动单元。托架包括马达。外壳从托架延伸并且限定通道。驱动组合件包括滑轮、带和环形构件。滑轮可旋转地安置在外壳内并且与马达可操作接合,使得马达的致动使滑轮旋转。带可旋转地安置在外壳内并且与滑轮可操作接合,使得滑轮的旋转影响带的旋转。环形构件安置在外壳的通道内并且被配置成用于不可旋转接收器械驱动单元。环形构件与带可操作接合,使得带的旋转影响环形构件的旋转。
在一些实施例中,带可为封闭回路并且包括从带的内表面延伸的齿。环形构件可具有从其外表面延伸的齿并且与带的齿可操作接合。环形构件可包括环和安置在环内的环形基板。环可具有从其延伸的环形构件的齿。环形基板可限定一个或多个孔。环和环形基板可协作限定被配置成接收器械驱动单元的腔。
预期托架可进一步包括从马达延伸的可旋转驱动轴和不可旋转地连接到驱动轴的轴耦合件。驱动组合件可进一步包括从动轴,所述从动轴具有不可旋转地连接到轴耦合件的近侧末端和不可旋转地连接到滑轮的远侧末端,使得托架的驱动轴的旋转影响轴耦合件的旋转以及继而驱动组合件的滑轮的旋转。托架的马达、托架的驱动轴和驱动组合件的从动轴中的每个可限定彼此成一直线的纵向轴线。
设想托架可进一步包括与马达电通信的印刷电路板以控制马达的操作。
在本公开的一些方面,带可为易弯的并且被配置成沿由外壳限定的长方半圆形状行进。
在一些实施例中,外壳可包括限定其中的壳体的侧壁和安置在壳体内并且连接到侧壁的基部。基部可限定外壳的通道和弓形底部凸耳。外壳可进一步包括从基部朝上延伸的弓形壁。驱动组合件可进一步包括第一轴承和第二轴承。第一轴承可安置在外壳中并且与环形构件接合。第二轴承可安置在外壳的弓形底部凸耳上并且与环形构件接合。第一和第二轴承有助于环形构件相对于外壳的旋转。
预期驱动组合件可进一步包括可旋转地安置在外壳内的第二滑轮。第二滑轮与带可操作接合。驱动组合件的滑轮彼此隔开。带围绕驱动组合件的滑轮并且围绕环形构件缠绕。
在本公开的另一方面,提供用于与手术机器人臂一起使用的手术组合件。手术组合件包括器械驱动单元和手术器械保持器。器械驱动单元包括外壳和可旋转地安置在外壳内的马达组合件。手术器械保持器包括托架、从托架延伸的外壳和驱动组合件。托架具有被配置成用于可移动接合到手术机器人臂的第一侧,和被配置成用于不可旋转地支撑器械驱动单元的外壳的第二侧。托架包括马达。器械驱动单元的外壳从托架延伸并且限定通道。驱动组合件包括滑轮、带和环形构件。滑轮可旋转地安置在手术器械保持器的外壳内并且与托架的马达可操作接合,使得托架的马达的致动使驱动组合件的滑轮旋转。带可旋转地安置在外壳内并且与滑轮可操作接合,使得滑轮的旋转影响带的旋转。环形构件安置在外壳的通道内并且被配置成用于不可旋转接收器械驱动单元的马达组合件。环形构件与带可操作接合,使得带的旋转引起环形构件,导致器械驱动单元的马达组合件相对于器械驱动单元的外壳旋转。
在一些实施例中,环形构件可包括环和安置在环内的环形基板。环可具有从其延伸的环形构件的齿。环形基板可限定接收通过其的马达组合件的驱动轴的一个或多个孔。环和环形基板可协作限定被配置成接收器械驱动单元的马达组合件的腔。
预期手术组合件可进一步包括被配置成用于与器械驱动单元的马达组合件不可旋转连接的手术器械。经由手术器械保持器的驱动组合件的器械驱动单元的马达组合件的旋转影响手术器械的旋转。
其它方面、特征和优点将从描述、附图和所附权利要求书而变得显而易见。
附图说明
在本文中参考附图描述本公开的实施例,其中:
图1为根据本公开的包括机器人手术组合件的机器人手术系统的示意图;
图2为根据本公开的实施例的具有分离的部件的机器人手术组合件和电动机械手术器械的透视图;
图3为机器人手术组合件的托架的透视图,示出支撑在机器人手术系统的轨滑道上;
图4为图3的托架和轨的透视图,示出机器人手术系统的无菌壳和袋耦合并且连接到托架和轨;
图5为图3和4的托架和轨的侧正视图,示出机器人手术系统的无菌壳和袋耦合并且连接到托架和轨;
图6为图5的托架和轨的侧正视图,示出根据本公开的实施例的无菌屏障轴环组合件到托架和轨的耦合或连接;
图7为在通过图2的7-7截取时图2中示出的机器人手术组合件的马达组的纵向横截面视图;
图8为图7的马达组的罐马达和相应的马达耦合器的透视图;
图9为本公开的马达组的组件、驱动传送组合件和机器人手术组合件的锁定环的横向截面视图;
图10为图9的无菌屏障轴环组合件的顶部平面视图;
图11为示出连接到相应的马达耦合器的无菌屏障轴环组合件的驱动耦合器的透视图;
图12为无菌屏障轴环组合件的触感环的透视图;
图13为具有分离的部件的电动机械手术器械和图9的无菌屏障轴环组合件的浮动板和耦合套箍的透视图;
图14为电动机械手术器械的驱动组合件的透视图;
图15为在通过图13的15-15截取时的横截面视图;
图16为在通过图15的16-16截取时的横截面视图;
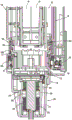
图17为经由无菌屏障轴环组合件耦合到载体的电动机械手术器械的放大、纵向横截面视图;
图18为图17的图示的另一放大视图,其中电动机械手术器械从其中移除;
图19为图17的图示的另一放大视图,其中电动机械手术器械耦合到机器人手术组合件,并且其中机器人手术组合件的驱动传送轴与电动机械手术器械的近侧耦合器分离;
图20为图17的图示的再一放大视图,其中电动机械手术器械耦合到机器人手术组合件,并且其中机器人手术组合件的驱动传送轴耦合到电动机械手术器械的近侧耦合器;
图21A为在通过横跨电动机械手术器械的释放操纵杆或桨延伸的平面截取时耦合到机器人手术组合件的电动机械手术器械的纵向横截面视图,并且示出电动机械手术器械经由无菌屏障轴环组合件耦合到载体;
图21B到21D为示出电动机械手术器械耦合到机器人手术组合件的渐进视图;
图22为根据本公开的另一个实施例的机器人手术组合件的前透视图,示出支撑在机器人手术系统的滑轨上并且耦合到电动机械手术器械;
图23为图22的机器人手术组合件和电动机械手术器械的后透视图;
图24为连接到图22的机器人手术组合件的电动机械手术器械的底部透视图,其中其部分以虚线示出;
图25为图22的机器人手术组合件的底部透视图;
图26为在通过图24的26-26截取时的横截面视图;
图27为图22的机器人手术组合件的滑轮的透视图;
图28为图22的机器人手术组合件的无菌屏障的后底部透视图;
图29为图22的机器人手术组合件的无菌屏障的前顶部透视图;
图30为示出连接到图22的机器人手术组合件的无菌屏障轴环组合件的电动机械手术器械的前透视图;
图31为示出连接到图22的机器人手术组合件的无菌屏障轴环组合件的电动机械手术器械的后透视图;
图32为图22的机器人手术组合件和电动机械手术器械的纵向横截面视图,示出连接到滑轨;
图33为图32的细节的指示区域的放大视图;
图34为在通过图32的34-34截取时的机器人手术组合件和电动机械手术器械的横截面视图;
图35为图34的细节的指示区域的放大视图;
图36为具有分离的部件的机器人手术组合件的另一个实施例和用于与图2或图36的机器人手术组合件一起使用的各种电动机械手术器械的实施例的侧正视图;
图37为在图36中示出的各种电动机械手术器械的一个实施例的俯视图;
图38为图1的机器人手术组合件的一部分的放大局部横截面视图;
图39为图1的机器人手术组合件的放大侧横截面视图,其中其无菌接口模块示出处于第一位置;
图40为图1的机器人手术组合件的一部分的放大侧横截面视图,其中其无菌接口模块示出处于第二位置;
图41为图1的机器人手术组合件的一部分的放大前视图,其中其无菌接口模块示出处于第一位置;
图42为在图41中示出的机器人手术组合件的部分的放大前视图,其中其无菌接口模块示出处于第二位置;
图43为在图41中示出的机器人手术组合件的部分的透视横截面图,其中其无菌接口模块示出处于第一位置;
图44为在图41中示出的机器人手术组合件的部分的透视横截面图,其中其无菌接口模块示出处于第二位置;
图45为处于第一位置的无菌接口模块的放大顶部横截面视图;
图46为图1的机器人手术组合件的无菌接口模块的驱动传送组合件和马达组合件的马达耦合器的放大透视图,驱动耦合器示出处于第一状态;
图47为图46的驱动传送组合件和马达耦合器的透视图,其中驱动传送组合件示出处于第二状态;
图48为具有分离的部件的根据本公开的机器人手术组合件的又一实施例的侧正视图;
图49为图48的机器人手术组合件的无菌接口模块的透视图,示出保险夹在适当位置;
图50为具有分离的部件的图49的无菌接口模块的透视图;
图51为在通过图49的51-51截取时的横截面视图;
图52为在通过图49的52-52截取时的横截面视图;
图53为在通过图49的53-53截取时的横截面视图;
图54为图48到53的无菌模块接口的侧正视图;
图55为在通过图49的55-55截取时的图48到54的无菌模块接口的横截面正视图,示出在第一条件下无菌模块接口;
图56为图55的无菌模块接口的横截面正视图,示出在第二条件下无菌模块接口;
图57为包括连接到其的手术器械的图48的机器人手术组合件的纵向横截面视图;
图58为包括连接到其的手术器械的图48的机器人手术组合件的另一个纵向横截面视图;
图59为包括手术器械保持器、器械驱动单元和手术器械的图1的手术组合件的另一个实施例的透视图;
图60A为具有分离的部件的图59的手术器械保持器的透视图;
图60B为具有组装的部件的图59的手术器械保持器的透视图;
图61为手术器械保持器的沿在图60B中的线61-61截取的横截面视图;
图62为具有分离的部件的图60B的手术器械保持器的驱动组合件和外壳的透视图;
图63为图62的手术器械保持器的外壳的放大视图;
图64A为手术器械保持器的外壳沿图63的线64A-64A截取的横截面视图;
图64B为如图64A所示的外壳的横截面视图,其中添加安置在其中的驱动组合件的环形构件和滑轮;
图65A为图63的外壳的俯视图;
图65B为图63的外壳的俯视图,其中添加安置在其中的驱动组合件的带和滑轮;
图66A为图65B的手术器械保持器的外壳的俯视图,其中添加张紧组合件;
图66B为在图66A中示出的细节的指示区域的透视图;
图67为手术组合件沿图59的线67-67截取的横截面视图,示出器械驱动单元安置在手术器械保持器中;和
图68为手术组合件沿图59的线68-68截取的另一个横截面视图,示出器械驱动单元安置在手术器械保持器中。
具体实施方式
参考附图详细地描述本发明所公开的包括用于驱动电动机械手术器械的操作的器械驱动单元的手术组合件和其方法的实施例,其中类似参考标号表示若干视图中的每一个中的同一或对应元件。如本文中所使用,术语“远侧”是指机器人手术系统、手术组合件或其组件的较接近患者的部分,而术语“近侧”是指机器人手术系统、手术组合件或其组件的较远离患者的部分。如本文中所使用,术语平行和垂直应理解包括距真实平行和真实垂直高达约+或-10度的大体上平行和大体上垂直的相对配置。
如本文中所使用,术语“临床医生”是指医生、护士或其它医护人员并且可包括辅助人员。在以下描述中,未详细地描述熟知功能或构造以免以不必要的细节混淆本公开。
如下文将详细地描述,提供配置成附接到手术机器人臂的手术组合件。手术组合件包括具有例如(但不限于)被配置成使电动机械器械绕其纵向轴线旋转的马达的器械驱动单元。在一些实施例中,马达可为中空芯马达。此外,提供配置成确定和调节机电动机械器械绕其纵向轴线旋转的程度的反馈组合件。电动机械器械的旋转可经由传动装置(齿轮、带和/或电缆);经由气动装置和/或经由液压装置用中空芯马达、罐马达(无刷或有刷)实现。电动机械器械的旋转轴线可与器械驱动单元或机器人臂成一体。
首先参考图1,手术系统,例如机器人手术系统1,通常包括一个或多个手术机器人臂2、3,控制装置4和与控制装置4耦合的操作控制台5。手术机器人臂2、3中任一个可具有机器人手术组合件100和耦合到其的电动机械手术器械200。在一些实施例中,机器人手术组合件100可可移除地附接到手术机器人臂2、3中的一个的滑轨40。在某些实施例中,机器人手术组合件100可固定地附接到手术机器人臂2、3中的一个的滑轨40。
操作控制台5包括被设置以显示三维图像的显示装置6;和借助于用临床医生(未示出)能够远距离操控在第一操作模式中的机器人臂2、3手动输入装置7、8,如原则上本领域的技术人员已知。机器人臂2、3中的每一个可由通过接头连接的任何数目的构件构成。机器人臂2、3可通过连接到控制装置4的电驱动器(未示出)驱动。控制装置4(例如计算机)被设置以例如借助于计算机程序以使得机器人臂2、3、附接机器人手术组合件100和因此电动机械手术器械200(包括电动机械末端执行器,未示出)执行根据借助于手动输入装置7、8限定的移动的期望移动的方式启动驱动器。还可以使得控制装置4调节机器人臂2、3和/或驱动器的移动的方式设置所述控制装置。
机器人手术系统1被配置成用于待借助于手术器械,例如电动机械手术器械200以微创方式治疗的安放(例如躺)在手术台“ST”上的患者“P”。机器人手术系统1还可包括多于两个机器人臂2、3,额外机器人臂同样连接到控制装置4并且借助于操作控制台5远距离操控。手术器械,例如,电动机械手术器械200(包括其电动机械末端执行器),还可附接到任何(一个或多个)额外机器人臂。
控制装置4可控制一个或多个马达,例如马达(马达1...n),每个马达被配置成在任何数目的方向上驱动机器人臂2、3的移动。另外,控制装置4可控制包括安置在机器人手术组合件100的无菌屏障外壳130内的马达组50的马达52、54、56和58(图2、7和17到21A)的器械驱动单元110。马达组50的马达52、54、56和58驱动电动机械手术器械200的末端执行器的各种操作。马达52、54、56和58可包括旋转马达,例如罐马达。马达52、54、56和58中的一个或多个可被配置成驱动电动机械手术器械200,或其组件沿其纵向轴线“X”的相对旋转。在一些实施例中,马达组50的每个马达可被配置成致动以操作方式连接到驱动杆或操纵杆臂以影响电动机械手术器械200的电动机械末端执行器的操作和/或移动的驱动螺钉340(或,例如线性驱动器、绞盘等)。
根据本公开,电动机械手术器械200通过具有距电动机械手术器械200的旋转的纵向轴线偏移径向距离的旋转轴线的马达44(例如在一个实施例中,第五轴线马达,参见图24)围绕其旋转的纵向轴线旋转。
对于机器人手术系统的构造和操作的详细讨论,可参考题为“医学工作站(Medical Workstation)”的2011年11月3日提交的美国专利申请公开第2012/0116416号,其全部内容以引用的方式并入本文中。
继续参考图1,机器人手术系统1包括与机器人臂2或3耦合或耦合到其的机器人手术组合件100和耦合到机器人手术组合件100的电动机械手术器械200。机器人手术组合件100将来自其马达的动力和致动力传送到电动机械手术器械200的从动构件以最终驱动电动机械手术器械200的末端执行器的组件的移动,例如刀片(未示出)的移动和/或末端执行器的钳口构件的闭合和打开,末端执行器的铰接/旋转/倾斜/偏转,和/或钉合器的致动或起动。机器人手术组合件100还可被配置成用于电外科能量类器械等(例如电缆驱动器、滑轮、摩擦轮、齿条与小齿轮布置等)的启动或起动。
现在转向图2到6,机器人手术组合件100可连接到可滑动地安装到轨40上的接口面板或托架42。托架42支撑或容纳接收来自控制装置4的控制和动力的马达44(参见图24)。托架42可经由马达从动链或带41(参见图3)等沿轨40移动。替代地,参考图32和33,托架42可经由螺纹杆/螺母布置沿轨40移动。举例来说,托架42可支撑接收通过其的螺纹杆40a的螺纹螺母或轴环42a。在使用时,在螺纹杆40a旋转时,螺纹轴环42a(例如,参见图32和33),继而,托架42被引起沿轨40平移。耦合件46(参见图24)等连接到马达44的驱动轴,并且可在致动马达44时顺时针或逆时针旋转。虽然示出并且描述链/带41或螺纹杆和轴环布置40a/42a,但预期可使用能够实现预期功能的任何其它系统(例如电缆驱动器、滑轮、摩擦轮、齿条与小齿轮布置等)。
参考图2到6和17到21A,托架42包括从其后面板42a和从轨40延伸或突出的耦合凸缘43。参考图2到4,托架42的耦合凸缘43限定通过其的开口或镗孔43a,并且可旋转地支撑器械旋转齿轮或滑轮48。滑轮48具有通过其的环形、非圆形、横向横截面轮廓通道或开口(例如大体上D形等),所述通道或开口限定用于无菌屏障外壳130的驱动传送组合件140的非旋转接收的键槽。滑轮48通过径向轴承等可旋转地支撑在耦合凸缘43中。
即刻参考图24到26,托架42可可旋转地将马达轴线齿轮或滑轮118(例如正齿轮)和张紧齿轮或滑轮120支撑在耦合凸缘114内。驱动带122等围绕滑轮48、马达轴线滑轮118和张紧滑轮120延伸。马达轴线滑轮118可连接到马达44的耦合件46,并且在其致动时通过马达44驱动。因此,在使用时,在致动马达44时,马达44驱动耦合件46,这驱动马达轴线滑轮118,以继而驱动带122,并且继而使滑轮48旋转。
参考图2到6,提供护罩或覆盖托架42的无菌壳或屏障60。壳60包括被配置并且适于覆盖托架42的后面板42a的后壳部分60a,和从后壳部分60a延伸并且被配置成覆盖托架42的耦合凸缘43的环形壳部分60b。壳60的环形壳部分60b限定与具有非圆形横向横截面轮廓(例如大体上D形等)的滑轮48的通道或开口48a对准的开口60c。无菌帷帘61等可固定或粘合到壳60并且可牵过轨40和机器人臂2或3以建立和维持在患者“P”、手术区和/或机器人手术系统1之间的无菌屏障。
参考图2和17到21A,机器人手术组合件100包括被配置成与壳60配合或以其它方式连接到壳60的无菌屏障外壳130。无菌屏障外壳130包括限定在其中的腔的中空壳或主体132。无菌屏障外壳130可枢转地或铰接地支撑被配置和适于选择性地封闭主体132的近侧末端的近侧盖或罩134。无菌屏障外壳130进一步包括支撑在主体132的远侧末端上或连接到其的驱动传送组合件140。
无菌屏障外壳130的主体132的腔被配置成在其中可滑动地接收马达组50等(参见图2、7、8和17到21A)。马达组50可包括被布置成矩形形式使得其相应的驱动轴52a、54a、56a和58a均彼此平行并且均在共同方向上延伸的四个马达52、54、56、58。每个马达52、54、56和58的驱动轴52a、54a、56a和58a分别可以操作方式与驱动传送组合件140的相应的驱动耦合器144a、146a、148a和150a(参见图9到11)介接。马达组50可包括四个罐马达等,各自具有具有非圆形横向横截面轮廓(例如大体上D形等)的驱动轴。
对于用于机器人手术组合件100中的示例性马达组50,可参考题为“机器人手术组合件(Robotic Surgical Assemblies)”的2015年6月19日提交的美国临时专利申请第62/181,817号,其全部内容以引用的方式并入本文中。
参考图8到11和17到20,马达耦合器52b、54b、56b和58b可分别不可旋转地连接到每个马达52、54、56和58的相应的驱动轴52a、54a、56a和58a。每个马达耦合器52b、54b、56b和58b可具有限定具有非圆形横向横截面轮廓的通过其的内腔的大体上管状配置。每个马达耦合器52b、54b、56b和58b的内腔被配置成分别不可旋转地接合和/或接收每个马达52、54、56和58的相应的驱动轴52a、54a、56a和58a,其中管腔可具有大体上D形横向横截面轮廓。
每个马达耦合器52b、54b、56b和58b包括一个或多个向远侧延伸的突片52c、54c、56c和58c,所述突片被配置成接合驱动传送轴144、146、148和150的驱动耦合器144a、146a、148a和150a的相应的配合特征部或槽144c、146c、148c和150c,以“十字滑块耦合件”的方式将来自马达52、54、56和58的旋转力传输到驱动传送组合件140的相应的驱动传送轴144、146、148和150。此十字滑块型耦合件限制反冲并且使得能够当其组件彼此略微未对齐时自动校正。在一些实施例中,这些突片和/或槽中的一个或多个可具有互补v形配置。预期任何旋转力传输特征部可提供在马达耦合器52b、54b、56b和58b的远侧末端处。在使用时,在马达52、54、56和58中的任一个被启动以使相应的驱动轴52a、54a、56a和58a旋转时,特定驱动轴52a、54a、56a和58a将旋转传输到相应的马达耦合器52b、54b、56b和58b,这继而,将旋转(经由突片52c、54c、56c和58c)传输到驱动传送组合件140的驱动传送轴144、146、148和150的相应的驱动耦合器144a、146a、148a和150a。这类布置和耦合允许马达耦合器52b、54b、56b和58b和驱动耦合器144a、146a、148a和150a在相对于其纵向轴线的任何径向方向上的一定程度的浮动。
参考图9到12和17到21A,无菌屏障外壳130的驱动传送组合件140包括从主体132的远侧末端延伸的主体部分142。驱动传送组合件140的主体部分142具有非圆形形式(例如大体上D形,如所示出)外轮廓用于键合接收在托架42的滑轮48的互补非圆形(例如D形,如所示出)通道或开口48a内。虽然示出并且描述D形横向横截面轮廓,但任何非圆形横向横截面轮廓可用于提供键合连接,包括(并且不限于)六边形、Allen、星形、交叉、双“D”、“T”、梅花、val、十字、螺旋轮廓。
驱动传送组合件140可旋转地支撑至少一个(并且如在图11和18到20中所示),四个驱动传送轴(仅示出驱动传送轴144和148)。如所示出,每个驱动传送轴(例如144和148)的近侧末端经由马达耦合器52b、54b等不可旋转地支撑相应的驱动耦合器(例如,分别地144a和148a),其被配置并且适于不可旋转连接到马达组50的相应的马达52、54、56和58的驱动轴52a、54a、56a和58a。具体来说,每个驱动耦合器144a、146a、148a和150a经由销槽布置可平移地支撑在相应的驱动传送轴144、146、148和150上,使得耦合器144、146、148和150可在相应的驱动传送轴144、146、148和150上浮动。具体参考图9,每个驱动耦合器144a、146a、148a和150a限定被配置成接收和传输来自马达组50的马达52、54、56和58的相应的驱动轴52a、54a、56a和58a的旋转力的相应的配合特征部144c、146c、148c和150c。
每个驱动传送轴144、146、148和150的远侧末端支撑相应的驱动耦合器144b、146b、148b和150b,其被配置并且适于不可旋转连接到电动机械手术器械200的驱动组合件300的近侧耦合器310。预期每个驱动耦合器144b、146b、148b和150b可相似于冠齿轮等。
相应的偏置构件144d、146d、148d和150d(例如压缩弹簧)可插在驱动耦合器144a、146a、148a和150a和驱动耦合器144b、146b、148b和150b之间,其中偏置构件144d、146d、148d和150d维持驱动耦合器144a、146a、148a和150a处于延伸状态,并且维持远侧浮动板173处于延伸状态,如下文将更详细地描述。
虽然图11仅示出连接到(马达52的)驱动轴52b的驱动传送轴144时,但为了简明起见,其余的驱动传送轴146、148和150中的每个以与驱动传送轴144相同或相似方式构造并且本文中将不更细节描述。此外,如在图21A中所见,偏置构件175(以弹簧形式)可作用于远侧浮动板173以帮助维持远侧浮动板173处于延伸状态。
在使用时,在马达组50的马达52、54、56和58致动时,马达52、54、56和58的驱动轴52a、54a、56a和58a的旋转经由相应的驱动传送轴144、146、148和150分别传送到电动机械手术器械200的驱动组合件300的近侧耦合器310。
参考图10、25和28,驱动传送组合件140的主体部分142包括向远侧延伸的突片或舌片142d,形成插塞。插塞142d被配置成支撑其中的电连接器用于使得能够在容纳在无菌屏障外壳130中的马达组50和电动机械手术器械200的电连接器220(图13)之间的电互连。
如在图2、9、10和17到21A中所示,机器人手术组合件100包括可旋转地支撑在无菌屏障外壳130的主体132的远侧末端上的锁定环或轴环160。锁定轴环160从无菌屏障外壳130的主体132向远侧突出,并且限定被配置成用于螺纹连接到无菌屏障轴环组合件170的近侧环连接器171(参见图2、6和17到21A)的内螺纹160a(参见图17到21A),如下文将更详细描述。
参考图9和10,锁定环或轴环160不可旋转地将触感反馈环161支撑在其内。触感反馈环161包括被配置成接收在限定在锁定环或轴环160的内表面中的对应的凹槽160b(图10)中的一个或多个径向向外突出的结块或肋状物161a。触感反馈环161进一步包括从其径向向内突出并且被配置成用于与在驱动传送组合件140的主体部分142中形成的对应的凹槽142a耦合或配合的一个或多个燕尾连接器161b等。
在使用时,在临床医生将驱动传送组合件140围绕其纵向轴线旋转到期望角定向时,触感反馈环161的结块或肋状物161a选择性地进入锁定环或轴环160的对应的凹槽160b,以为临床医生提供关于驱动传送组合件140的角定向的触感反馈。预期提供锁定环或轴环160的凹槽160b和触感反馈环161的结块或肋状物161a,由此为驱动传送组合件140的每90°角定向或任何其它期望或设想角定向提供触感反馈。
现在转向图2、13和17到21A,机器人手术组合件100包括可连接到壳60的环形壳60b并且可延伸通过滑轮48的D形通道或开口48a的无菌屏障轴环组合件170。具体地说,无菌屏障轴环组合件170包括具有非圆形横向横截面外轮廓(例如大体上D形,等)的管状套筒主体172和具有互补非圆形横向横截面轮廓(例如大体上D形,等)的内镗孔172a。
无菌屏障轴环组合件170进一步包括支撑在管状套筒主体172的远侧末端上或以其它方式固定到其的半环形耦合套箍176。耦合套箍176包括(如至少在图13中所示)具有向远侧和横向打开的打开侧边缘或器械开口176b的U形主体部分176a,和一对相对侧臂176c。主体部分176a的每个侧臂176c包括在其内并置表面中形成或从其突出的斜坡表面176d。每个斜坡176d从远侧末端(靠近打开侧边缘176b)到近侧末端(靠近主体部分176a的后跨部)高度增大。预期每个斜坡176d可相对于耦合套箍176的平坦远侧表面成大约10°角度。主体部分176a的每个侧臂176c进一步包括在其表面中形成的凹槽或通道176e,其被配置成可滑动地接收连接到管状套筒主体172的远侧末端或以其它方式从其延伸的远侧浮动板173的相应的臂或突片173a。
无菌屏障轴环组合件170进一步包括远侧浮动板173,如上文提到。远侧浮动板173包括从其延伸的一对平行臂或突片173a,并且所述一对平行臂或突片173a尺寸设定成延伸通过耦合套箍176的凹槽或通道176e并且从其突出。
远侧浮动板173进一步限定可包括并且不限于其中的径向或矩形阵列的开口173b的开口的型式,驱动传送组合件140的每个驱动传送轴144、146、148和150的远侧末端延伸通过所述开口。具体地说,相应的驱动传送轴144、146、148和150的驱动耦合器144b、146b、148b和150b可旋转地坐落在远侧浮动板173的相应开口173b中。
在操作中,在耦合套箍176连接到管状套筒主体172的远侧末端的情况下,偏置构件144d、146d、148d和150d按压相应的驱动传送轴144、146、148和150的驱动耦合器144a、146a、148a和150a到延伸状态,这继而,抵靠远侧浮动板173按压以维持远侧浮动板173处于延伸状态,由此远侧浮动板173的所述一对平行臂或突片173a延伸通过耦合套箍176的凹槽或通道176e并且从其突出。
无菌屏障轴环组合件170用以将无菌屏障维持在无菌组件(例如,无菌屏障外壳130、电动机械手术器械200等)和非无菌组件(例如机器人臂2、3、马达组50等)之间。具体地说,无菌屏障轴环组合件170延伸通过壳60的环形壳60b的开口,并且更具体地说,通过托架42的滑轮48的D形通道或开口48a。在操作中,在接口面板42的马达44致动时,马达44驱动滑轮48(如上所述),这继而引起无菌屏障轴环组合件170旋转。在驱动传送组合件140延伸通过无菌屏障轴环组合件170的管状套筒主体172的内部镗孔172a并且键合到其的情况下,在无菌屏障轴环组合件170旋转时,驱动传送组合件140旋转,这继而使马达组50旋转,这可旋转地保留或容纳在无菌屏障外壳130中。
现在转向图13到21A,示出并且将描述电动机械手术器械200。电动机械手术器械200可具有固定到或可固定到其远侧末端的手术器械或末端执行器(未示出)。电动机械手术器械200被配置成将通过机器人手术组合件100(例如经由马达组50的马达52到58)供应的旋转力/移动转换成驱动构件380的纵向移动以影响其各种功能。
电动机械手术器械200包括外壳组合件210,所述外壳组合件210包括限定在其中的被配置成在其中接收驱动组合件300的至少一个腔或镗孔212a的外壳212。根据本公开,外壳212的镗孔212a被配置成以操作方式支撑四个分离的驱动组合件300。预期镗孔212a可被配置成在其中限定四个单独分散的或互连的镗孔部分,其中每个部分以操作方式支撑四个驱动组合件300中的分离的一个。
如在图15和16中所示,外壳212的镗孔212a的每个部分限定在其中的相应的纵向延伸的沟槽或通道212b。每个通道212b被配置成滑动地接受从相应的驱动组合件300的驱动螺母350径向延伸的轨或突片350b,如下文将更详细地描述。
外壳212进一步包括安置在其相对侧表面上的斜坡式凸轮表面218,用于与无菌屏障轴环组合件170(图13)的耦合套箍176的U形主体部分176a的斜坡表面176d横向连接/断开连接(例如侧装载,下文更详细地描述)以将电动机械手术器械200连接到机器人手术组合件100。当电动机械手术器械200全连接到机器人手术组合件100时,电动机械手术器械200的驱动组合件300的近侧耦合器310开始与机器人手术组合件100的驱动传送组合件140的相应的驱动传送轴144、146、148和150对准并且连接到其。
电动机械手术器械200的外壳组合件210的外壳212支撑被配置成用于选择性连接到机器人手术组合件100的驱动组合件140的插塞146的电连接器220(图13),如上所述。电动机械手术器械200可包括电子装置,包括并且不限于存储器(用于存储识别信息、使用信息等)、有线或无线通信回路(用于从电动机械手术器械200、控制装置4和/或远程中心处理系统接收数据或信息/将数据或信息传输到电动机械手术器械200、控制装置4和/或远程中心处理系统)。机器人手术组合件100可被配置成允许专用电烙电缆等的通道或布线用于使用和连接到电外科类电动机械手术器械(例如,用于消融、凝结、密封等)。电连接器220可包括并且不限于导电连接器、磁性连接器、电阻连接器、电容连接器、霍尔传感器、簧片开关等。
继续参考图13到21A,电动机械手术器械200的外壳组合件210包括多个驱动组合件300。在所说明的实施例中,电动机械手术器械200包括四个驱动组合件300;然而在不脱离本公开的范围的情况下电动机械手术器械200可包括更多(例如五个或六个)或更少(例如三个)驱动组合件300。
每个驱动组合件300包括近侧耦合器310、近侧轴承320、驱动螺钉340、驱动螺母350、偏置元件370和驱动构件(例如驱动杆或驱动电缆)380。每个驱动组合件300的近侧耦合器310被配置成与驱动传送组合件140的驱动传送轴144、146、148和150的相应的驱动耦合器144b、146b、148b和150b啮合接合。在操作中,如上所述,驱动传送组合件140的驱动传送轴144、146、148和150的旋转导致相应的驱动组合件300的相应的近侧耦合器310的旋转。
每个驱动组合件300的近侧耦合器310键合到或以其它方式不可旋转地连接到相应的驱动螺钉340的近侧末端。因此,近侧耦合器310的旋转导致相应的驱动螺钉340的对应的旋转。
每个近侧轴承320围绕邻近外壳组合件210的外壳212的近侧末端的相应的驱动螺钉340的近侧部分安置。每个驱动螺钉340的远侧末端或顶端可可旋转地安置或支撑在限定在外壳212的远侧末端中的相应的凹槽212c中(参见图15)。
驱动螺钉340包括螺纹主体或轴部分340a,并且限定延伸通过其径向中心的纵向轴线“A-A”(参见图14)。在使用时,如上所述,近侧耦合器310的旋转导致相应的驱动螺钉340围绕纵向轴线“A-A”在对应的方向上并且以对应的旋转速率旋转。
驱动螺母350(或绞盘)包括被配置成机械地接合驱动螺钉340的螺纹轴部分340a的纵向延伸通过其的螺纹孔隙350a。驱动螺母350被配置成以使得驱动螺钉340的旋转引起驱动螺母350的纵向移动的方式安放在驱动螺钉340上。即,驱动螺母350和驱动螺钉340彼此螺纹式接合。此外,近侧耦合器310在第一方向上(例如,顺时针)的旋转引起驱动螺母350在第一纵向方向上(例如,向近侧)沿驱动螺钉340移动,并且近侧耦合器310在第二方向上(例如,逆时针)的旋转引起驱动螺母350在第二纵向方向上(例如,向远侧)相对于驱动螺钉340移动。
每个驱动螺母350包括邻近其螺纹孔隙350a安置的形成于在其中形成的接合突片350c的袋形区。每个保留袋形区被配置成保留相应的驱动构件380的近侧末端380a,如在下文进一步详细讨论。
每个驱动螺母350包括从其外表面径向延伸并且沿其外表面纵向延伸的突片350b。每个驱动螺母350的突片350b被配置成可滑动地安置在外壳212的镗孔212a中形成的纵向延伸通道212b中。每个驱动螺母350的突片350b与外壳212的镗孔212a的相应的通道212b配合以抑制或防止在驱动螺钉340旋转时驱动螺母350围绕纵向轴线“A-A”旋转。
每个驱动螺母350包括邻近其径向向内表面安置的接合部分350c,其被配置成机械地接合或保留相应的驱动构件380的近侧部分380a。在操作中,在驱动螺母350沿驱动螺钉340轴向位移时,驱动螺母350传输驱动构件380的伴随轴向平移。
偏置元件370(例如压缩弹簧)被配置成径向包围每个驱动螺钉340的螺纹轴部分340a的远侧部分。每个偏置元件370插在相应的驱动螺母350和外壳组合件210的外壳212的远侧表面之间。
每个驱动构件380从相应的驱动螺母350向远侧延伸通过外壳组合件210的外壳212的相应的中心镗孔或通道,并且被配置成机械地接合电动机械手术器械200的手术器械(例如末端执行器)的一部分。
在操作中,至少一个驱动构件380的纵向平移被配置成驱动电动机械手术器械200的末端执行器的功能。举例来说,特定驱动构件380的远侧平移可被配置成相对于于另一个接近末端执行器的一对钳口构件,并且举例来说,同一驱动构件380的近侧平移可被配置成移动至少一个钳口构件远离另一个钳口构件。此外,电动机械手术器械200的另一个驱动构件380的远侧平移可被配置成在第一方向上铰接末端执行器的所述一对钳口构件,并且另一个驱动构件380的近侧平移可被配置成在第二方向上铰接末端执行器的所述一对钳口构件。
根据本公开,驱动构件380中的至少一个的远侧部分可包括柔性部分,而驱动构件380的近侧部分为刚性的,使得柔性远侧部分可遵循特定路径通过电动机械手术器械200。因此,偏置构件370用以维持驱动构件380处于拉伸以防止松弛或降低驱动构件380的柔性远侧部分的松弛的量。
在使用电动机械手术器械200期间(即,当机器人手术组合件100的(一个或多个)马达52、54、56和58,或其它供电驱动器用于旋转(一个或多个)近侧耦合器310时),近侧耦合器310的旋转导致驱动螺钉340的对应的旋转。由于在驱动螺钉340的螺纹部分340a和驱动螺母350的螺纹孔隙之间的接合,驱动螺钉340的旋转引起驱动螺母350的纵向平移。如上文所讨论,通过近侧耦合器310的旋转的方向确定驱动螺母350以及因此驱动螺钉340的纵向平移的方向。举例来说,驱动螺钉340的近侧平移导致与驱动螺钉340接合的相应的驱动构件380的对应的近侧平移。
此外,当一个驱动螺母350从第一驱动组合件300在第一纵向方向上(例如向近侧)移动时,设想驱动螺母350被迫使从不同驱动组合件300在第二相反纵向方向上(例如向远侧)对应地移动。这类配置用以补偿在驱动构件380中的任何松弛。预期并且根据本公开,每个驱动螺母350可独立地被驱动。
虽然末端执行器已经在这里描述为包括钳口组合件,但使用其它末端执行器为另外地或可替代地是可能的。可参考题为“用于机器人手术系统的腕和钳口组合件(Wristand Jaw Assemblies for Robotic Surgical Systems)”的2014年10月20日提交的共同拥有国际专利申请第PCT/US14/61329号,其全部内容以引用的方式并入本文中,用于与电动机械手术器械200一起使用或连接到其的末端执行器的构造和操作的说明性实例的详细讨论。
参考图13、21和35,电动机械手术器械200的外壳组合件210的外壳212支撑至少一个,期望地至少一对释放操纵杆或桨214在其相对侧上。每个释放桨214包括可枢转地连接到外壳212的第一末端214a和可移动到外壳212的外表面/可从外壳212的外表面移动的第二末端214b。每个释放桨214的第二末端214b限定锥形凸轮表面214c,其被配置成作用于无菌屏障轴环组合件170的远侧浮动板173的相应的臂或突片173a,以将电动机械手术器械200从机器人手术组合件100解开。具体地说,当电动机械手术器械200连接到无菌屏障轴环组合件170的半环形耦合套箍176时,远侧浮动板173的臂或突片173a与电动机械手术器械200的相应的桨214对齐并且对准。另外,远侧浮动板173的臂或突片173a的自由末端作用于桨214的相应的锥形凸轮表面214c以向外按压或推动桨214。
继续参考图13、21A和35,示出并且将描述电动机械手术器械200连接到机器人手术组合件100。初始地,如上文简单描述,无菌屏障轴环组合件170连接到壳60的环形壳60b,马达组50装载在无菌屏障外壳130的主体132的腔132a中,并且机器人手术组合件100的无菌屏障外壳130的驱动传送组合件140连接到壳60。
电动机械手术器械200随后通过首先将电动机械手术器械200的外壳212的斜坡式凸轮表面218与耦合套箍176的相相应的斜坡表面176d对准连接到无菌屏障轴环组合件170的耦合套箍176。如在图21B到21D中所见,电动机械手术器械200随后相对于机器人手术组合件100横向移动(例如侧装载),使得电动机械手术器械200的斜坡式凸轮表面218使电动机械手术器械200沿耦合套箍176的斜坡表面176d向上(向近侧)凸起,直到电动机械手术器械200的外壳212完全接收或坐落在耦合套箍176中。
在电动机械手术器械200横向移动到耦合套箍176中时,如上所述,外壳212被向上(向近侧)推动以与远侧浮动板173的内肩部173c、173d(图21A)接触,以向近侧推动远侧浮动板173抵靠远侧浮动板173的远侧弹簧偏置。另外,当电动机械手术器械200恰当地连接到机器人手术组合件100时,电动机械手术器械200的近侧耦合器310开始与机器人手术组合件100的驱动传送组合件140的相应的驱动传送轴144、146、148和150对准(例如偏置的弹簧)并且连接到其。
电动机械手术器械200从机器人手术组合件100断开连接包括朝向外壳212按压电动机械手术器械200的桨214,由此桨214的锥形凸轮表面214c作用于远侧浮动板173的臂或突片173a的自由末端。在桨214作用于臂或突片173a的自由末端时,桨214向近侧推动远侧浮动板173,由此驱动传送轴144、146、148和150的驱动耦合器144b、146b、148b和150b抵靠相应的偏置构件144d、146d、148d和150d的偏置被向近侧推动,以将驱动耦合器144b、146b、148b和150b从电动机械手术器械200的相应的近侧齿轮或耦合器310分离或解开(图20)。其后,电动机械手术器械200可从机器人手术组合件100横向移除或断开连接。
如在图21A中所示,无菌屏障轴环组合件170的管状套筒主体172包括在轴线方向上延伸的一对相对的可偏转指状物172b。每个指状物172b在具有径向向外延伸的外成角度的表面172c和径向向外延伸的内成角度的表面172d的自由末端终止。另外,近侧环连接器171限定以与管状套筒主体172的外成角度的表面172c互补的角度取向的内环形成角度的表面171a。另外,无菌屏障外壳130的远侧鼻形物限定以与管状套筒主体172的内成角度的表面172d互补的角度取向的外环形成角度的表面130a。
在使用时,在管状套筒主体172搭扣到近侧环轴环171中的情况下,近侧环轴环171通过将近侧环轴环171的近侧末端插入到锁定环轴环160中并且旋转锁定环轴环160以引入近侧环轴环171并且与其螺纹连接来连接到锁定环轴环160。在锁定环轴环160旋转以引入近侧环轴环171时,近侧环轴环171的内环形成角度的表面171a作用于管状套筒主体172的可偏转指状物172b的外成角度的表面172c,以抵靠无菌屏障外壳130的远侧鼻形物的外环形成角度的表面130a夹紧或捕获管状套筒主体172的可偏转指状物172b。以此方式,锁定环轴环160的拧紧旋转接近驱动传送组合件140和近侧环轴环171并且将驱动传送组合件140配合到管状套筒主体172。
继续参考图21A,密封构件177(呈O形环、衬垫等形式)可插在外部外壳部分130的外环形凸缘和近侧环轴环171的近侧凸耳或表面之间。
现在转向图22到35,示出并且描述根据本公开的另一个实施例的锁定环或轴环,并且一般将其表示为锁定环或轴环460。此外,如在图22到35中所示,示出并且描述根据本公开的另一个实施例的无菌屏障轴环组合件,并且一般将其表示为无菌屏障轴环组合件470。在图22到35中,类似参考标号已经用于识别与在图1到21A中类似的部件。另外,为了简明起见,仅将在下文中详细描述在具有锁定环或轴环160和无菌屏障轴环组合件170(图1到21A)的机器人手术组合件100和具有锁定环或轴环460和无菌屏障轴环组合件470(图22到35)的机器人手术组合件100之间的差别。
如在图21A到35中所示,机器人手术组合件100可包括可旋转地支撑在无菌屏障外壳130的主体132的远侧末端上的锁定环或轴环460。锁定轴环460从无菌屏障外壳130的主体132向远侧突出,并且限定被配置成用于螺纹连接到无菌屏障轴环组合件470的内螺纹460a(参见图33和35、27)。锁定轴环460的最远侧表面限定在其中的一系列切口或凹槽460b。凹槽460b可围绕锁定轴环460的最远侧表面径向延伸。凹槽460b可包括四组的三个凹槽,其中一组凹槽彼此相隔90°(或基本上相隔90°)定位。
机器人手术组合件100可进一步包括可连接到壳60的环形壳60b并且可延伸通过滑轮48的D形通道或开口48a的无菌屏障轴环组合件470(参见图26和27)。具体地说,无菌屏障轴环组合件470包括具有非圆形横向横截面外轮廓(例如大体上D形等)的管状套筒主体172和具有互补非圆形横向横截面轮廓(例如大体上D形等)的内镗孔472a。管状套筒主体472的近侧部分的外表面限定在其中的螺纹472b,其中螺纹472b在管状套筒主体472的至少一个径向部分中形成。管状套筒主体472的近侧部分包括径向向外突出并且从其近侧末端到远侧末端的高度增大的一对相对的可偏转突片472c。
无菌屏障轴环组合件470进一步包括支撑在管状套筒主体472上的环凸缘474。环凸缘474从套筒主体472径向向外延伸。环凸缘474包括从环凸缘474的近端表面突出的一对相对的可偏转突片474a。环凸缘474的可偏转突片474a被配置成用于选择性接收在形成于锁定轴环460中的凹槽460b中。在轴环460旋转以将电动机械手术器械200固定到机器人手术组合件100时,在环凸缘474的可偏转突片474a和锁定轴环460的凹槽460b之间提供触感和/或音频反馈以提供电动机械手术器械200固定到机器人手术组合件100的指示。
预期聚合材料的片材(构成帷帘等(未示出))可包夹或捕获(或粘结、弹性配合或搭扣闩锁)在无菌屏障外壳130的锁定轴环460的最远侧表面和无菌屏障轴环组合件470的环凸缘474的近侧表面之间。帷帘可在无菌屏障外壳130上方、轨40上方和机器人臂2、3上方延伸。
参考图36,机器人手术系统的一个实施例包括具有四个独立控制的马达52、54、56和58的机器人手术组合件500,和包括具有四个驱动组合件256a到256d的驱动系统256的电动机械手术器械250,其中每个驱动组合件选择性地可连接到机器人手术组合件500的相应的马达52、54、56和58,例如,如上文关于机器人手术组合件100所描述。电动机械手术器械250类似于电外科器械200并且本文仅描述到描述其构造和操作的差别的必要程度。
电动机械手术器械250包括选择性地支撑在其远侧末端上的末端执行器252(在图36中示出,处于打开位置)和支撑在其近侧末端上的器械外壳253。虽然末端执行器252可包括钳口组合件等,但使用其它末端执行器另外地或可替代地是可能的。可参考题为“用于机器人手术系统的腕和钳口组合件(Wrist and Jaw Assemblies for Robotic SurgicalSystems)”的2014年10月20日提交的共同拥有国际专利申请第PCT/US14/61329号,美国专利第8,636,192号或美国专利第8,925,786号,其中的每个的全部内容以引用的方式并入本文中,用于详细讨论用于与电动机械手术器械250一起使用或连接到其的末端执行器的构造和操作的说明性实例。
器械外壳253支撑拆卸组合件254和驱动组合件256。拆卸组合件254包括在器械外壳253的相对侧上并且可操作以将电动机械手术器械250与机器人手术组合件500选择性地分离的释放操纵杆或桨254a、254b。每个桨254a、254b可包括被配置成作用于无菌接口模块530的浮动板566的突片566b、566c的锥形凸轮表面(未示出)以从机器人手术组合件500解开电动机械手术器械250,如下文更详细描述(参见图43)。驱动系统256包括与耦合到电动机械手术器械250的末端执行器252以操控和/或操作末端执行器252的一个或多个驱动或连接器构件“CM”(如驱动电缆或驱动杆)协作的第一驱动组合件256a和第二驱动组合件256b、256c、256d。第一和第二驱动组合件256a到256d中的每个包括与下文更详细地描述的机器人手术组合件500的互补器械接合末端或耦合器(如在图47中示出的接合耦合器568e)可接合的接合耦合器258(例如齿轮等)。
如上文提到,机器人手术系统1被配置成用于待借助于手术器械(例如电动机械手术器械中的任一个,如直线/铰接仪器200和250(例如钉合器械、缝合器械、电烙器械等)、内窥镜250'或抓紧器250”)以微创方式治疗的安放(例如躺)在手术台“ST”上的患者“P”(图36)。机器人手术系统1可包括多于两个机器人臂2、3,额外机器人臂同样连接到控制装置4并且借助于操作控制台5远距离操控。手术器械,例如,电动机械手术器械200(图2)、250、250'和/或250”中的任何一个或多个,还可附接到额外机器人臂。
如上文提到,马达组50可包括被布置成使得四个马达中的每个在共同方向上延伸并且彼此平行以便与电动机械手术器械200(图2)、250、250'和/或250”中的任一个介接的形式的四个马达(例如具有非圆形驱动轴的罐马达等)。
一般来说,机器人手术组合件500将来自其马达52、54中的一个或多个的动力和致动力传送到电动机械手术器械250的相应的从动构件/驱动组合件256a到256d中的一个或多个(例如经由“十字滑块耦合件”布置等键合在一起用于在机器人手术组合件500和电动机械手术器械250之间传输旋转和/或轴向力),以最终驱动电动机械手术器械250的末端执行器252的一个或多个组件的移动。举例来说,来自机器人手术组合件500的动力/力传送到电动机械手术器械250实现刀片(未示出)的移动、末端执行器252的钳口构件的闭合和打开、钉合器的致动或起动、电外科能量类器械的启动或起动和/或其其它功能。
对于具有用于与当前描述的机器人手术系统的一个或多个组件一起使用的相同或相似组件中的一个或多个的相似机器人手术系统的构造和操作的详细讨论,还可参考题为“医学工作站(Medical Workstation)”的2011年11月3日提交的美国专利申请公开第2012/0116416号,其全部内容以引用的方式并入本文中。
现在转向图36到47,机器人手术系统1的机器人手术组合件500包括支撑马达组合件或马达组50的器械驱动单元或外壳510。机器人手术组合件500的外壳510包括连接器组合件540。
提供具有固定到其的无菌帷帘552的环构件550,其中环构件550允许来自马达组50的旋转力的通过,并且其中无菌帷帘552被配置成上覆于机器人手术组合件500和机器人臂2、3。环构件550被配置成用于可旋转附接到连接器组合件540的远侧末端(例如经由搭扣配合)。无菌帷帘552可按上文需要围绕外壳510、机器人手术组合件500和机器人臂2、3布置,以在各种前述组件和/或手术部位/流体和电动机械手术器械200(图2)、250、250'和/或250”之间提供无菌屏障。
提供轴环组合件或无菌接口模块530用于选择性地互连机器人手术组合件500和电动机械手术器械200(图2)、250、250'和/或250”中的任一个,类似于上文关于电动机械手术器械200耦合到机器人手术组合件100(例如侧装载)所描述。一般来说,无菌接口模块530用以在器械驱动单元或外壳510和电动机械手术器械(如电动机械手术器械250)之间提供接口。此介接有利地维持无菌性,在机器人手术组合件500和电动机械手术器械之间提供传输电通信的装置,提供用于将来自机器人手术组合件500的旋转力传送到电动机械手术器械用于用电动机械手术器械执行功能的装置,和/或提供选择性地附接/移除电动机械手术器械到机器人手术组合件500(例如用于快速器械更换)的装置。
机器人手术组合件500的马达组合件50包括经由从马达52、54延伸的对应数目的马达耦合器52b、54b(参见图41)耦合到无菌接口模块530的任何数目的马达52、54(例如2、3、4、5等)。
如在图40中所见,轴环组合件或无菌接口模块530包括耦合在电连接器532a、532b之间的电连接器532a、532b和电带状物534,以在机器人手术组合件500和耦合到其的任何电动机械手术器械(如电动机械手术器械250)之间提供电通信。
参考图41到45,无菌接口模块530包括具有上部部分562a、中间部分562b和下部部分562c的主体构件562。主体构件562的上部部分562a限定围绕上部部分562a从上部部分562a的肩部562e延伸的螺旋通道562d。上部部分562a进一步包括从上部部分562a向近侧延伸的一对附接臂562f、562g,以将无菌接口模块530固定到机器人手术组合件500的外壳510的连接器组合件540。所述一对附接臂562f、562g可以镜像关系安置在上部部分562a的相对侧上。
主体构件562的中间部分562b包括凸缘562h并且可旋转地支撑可旋转轴环564在其上。无菌接口模块530的可旋转轴环564限定从可旋转轴环564的肩部564b延伸的螺旋通道564a。可旋转轴环564的螺旋通道564a和可旋转轴环564的肩部564b补充主体构件562的上部部分562a的螺旋通道562d和主体构件562的上部部分562a的肩部562e。可旋转轴环564进一步包括夹持沟槽564c以有助于可旋转轴环564相对于无菌接口模块530的主体构件562的用户夹持和/或旋转,如由箭头“A”指示(下文更详细地描述)。
无菌接口模块530的主体构件562的下部部分562c呈支撑在主体构件562的中间部分562b的远侧末端上或以其它方式固定到其的半环形耦合套箍形式。主体构件562的下部部分562c包括具有向远侧和横向限定在侧臂562j、562k和开口之间的器械开口562i的U形主体。下部部分562c进一步包括补充电动机械手术器械250的外壳212的斜坡式凸轮表面218在其内表面上形成的斜坡式表面562x(图41)。器械开口562i被配置成在其中接收电动机械手术器械(如电动机械手术器械250),以将电动机械手术器械250可移除固定到机器人手术组合件500。下部部分562c的侧臂562j、562k从主体构件562的中间部分562b向远侧延伸并且被安放以将电动机械手术器械250支撑在下部部分562c的器械开口562i内。
类似于上文关于机器人手术组合件100所描述的远侧浮动板173,无菌接口模块530进一步包括支撑在主体构件562的中间部分562b和主体构件562的下部部分562c之间的浮动板566。无菌接口模块的浮动板566在未压缩位置或延伸位置和压缩或缩回位置之间可移动。浮动板566为通过圆弹簧(例如波形弹簧,未示出)和通过无菌接口模块530的驱动传送组合件(例如568、570)的偏置构件朝向未压缩位置向远侧偏置的弹簧。在无菌接口模块530的浮动板566的未压缩位置中,浮动板566与中间部分562b的底表面562l隔开距离“D”(参见图43)。浮动板566包括底部部分566和从基部部分566向远侧延伸的突片566b、566c。突片566b、566c延伸通过主体构件562的下部部分562c。浮动板566限定在其中的接收无菌接口模块530的第一和第二驱动传送组合件568、570的孔隙566d、566e。虽然在本文中详细地示出并且描述一对驱动传送组合件568、570,可提供任何数目的驱动传送组合件,例如一个、三个、五个等。
参考图43到47,无菌接口模块530的第一和第二驱动传送组合件568、570包括限定与马达组合件50的相应的马达耦合器52b、54b的耦合末端56可接合的耦合末端568b、570b的相应的驱动耦合器568a、570a。第一驱动传送组合件568包括传送轴568c,并且第二驱动传送组合件570包括传送轴570c。相应的第一和第二驱动传送组合件568、570的传送轴568c、570c延伸到在其远侧末端处的相应的器械接合末端或耦合器568e、570e(例如具有向远侧延伸的齿的齿轮等)。
预期第一驱动传送组合件568的传送轴568c可进一步支撑安置传送轴568c的器械接合耦合器568e的近侧的驱动耦合器568d在其上。
相应的偏置构件或弹簧568f(第二驱动传送组合件570的偏置构件未示出)支撑在相应的第一和第二驱动传送组合件568、570中的每个的驱动耦合器568a、570a和传送轴568c、570c之间,使得每个弹簧568f被配置成在其压缩时将弹簧力施加到其相应的第一或第二驱动传送组合件568、570。驱动传送组合件568、570的偏置构件可为压缩弹簧。第一和第二驱动传送组合件568、570的驱动耦合器568a、570a限定在其中的可滑动地接收从第一和第二驱动传送组合件568、570的传送轴568c、570c延伸的翼568h(第二驱动传送组合件570的翼未示出)的侧槽568g、570g。传送轴568c、570c的翼568h被配置成响应于在传送轴568c、570c中的一个和其相应的驱动耦合器568a、570a之间的相对移动滑动通过第一和第二驱动传送组合件568、570的侧槽568g、570g。就此而言,驱动传送组合件568、570的驱动耦合器568a、570a以“十字滑块”耦合件的方式提供耦合。举例来说,驱动耦合器568a的侧槽568g横向和/或垂直于由驱动耦合器568a的耦合末端568b限定的槽,由此驱动耦合器568a经由“十字滑块”耦合件耦合驱动传送组合件568的传送轴568c和马达52的驱动轴52a。在一些实施例中,任何本发明所公开的耦合器的一个或多个配合表面(如由耦合末端568b限定)例如可包括微小拔模角以最小化反冲(例如弹簧568f朝向驱动轴52a推压驱动耦合器568a,并且拔模角确保驱动耦合器568a和驱动轴52a降至或降入紧密接近)。
无菌接口模块530进一步包括支撑在无菌接口模块530的可旋转轴环564的内表面上的环耦合器或齿轮572。无菌接口模块530包括支撑在无菌接口模块530的主体构件562的中间部分562b上的惰轮耦合器或齿轮574。惰齿轮574与第一驱动传送组合件568的驱动耦合器或齿轮568d啮合,并且响应于可旋转轴环564的旋转移动,选择性地可与环形齿轮572接合(参见图43和44)。无菌接口模块530进一步包括被配置成横向支撑第一和第二驱动传送组合件568、570的支撑板576、578。无菌接口模块530的支撑板576固定在限定在环形齿轮572和可旋转轴环564的内表面之间的支撑通道564c(参见图44)内,使得在相对于第一和第二驱动传送组合件568、570的传送轴568c、570a轴向移动支撑板576时,可旋转轴环564可围绕支撑板576旋转。
支撑板576可固定到第一和第二驱动传送组合件568、570的驱动耦合器568a、570a,以在支撑板576随无菌接口模块530的可旋转轴环564轴向移动时,相对于第一和第二驱动传送组合件568、570的传送轴568c、570c轴向移动驱动耦合器568a、570a。在无菌接口模块530的可旋转轴环564在第一和第二位置(和在第一和第二位置之间任何数目的中间位置)之间移动时,驱动耦合器568a、570a的轴向移动使得驱动器耦合器568a、570a能够选择性地接合到外壳510的马达组合件50的马达耦合器54b、52b/和从马达耦合器554b、52b解开。马达组合件50的马达耦合器52b、54b与无菌接口模块530的相应的驱动耦合器568a、570a,在无菌接口模块530的可旋转轴环564处于第二位置(图42和44)时接合,并且在无菌接口模块530的可旋转轴环564处于第一位置(图41和43)时解开。有利地,如果马达组合件50被卡,那么在马达组合件50的马达耦合器52b、54b和无菌接口模块530的驱动耦合器568a、570a之间的解开提供无菌接口模块530与马达组合件50的简化分离用于紧急释放。
为了将电动机械手术器械(如电动机械手术器械200、250等)耦合到无菌接口模块530,电外科器械的斜坡式凸轮表面(例如电动机械手术器械200的外壳212的斜坡式凸轮表面218)与无菌接口模块530的下部部分562c的对应的斜坡表面562x对齐。电动机械手术器械200随后相对于机器人手术组合件500横向移动(例如侧装载)直到电动机械手术器械的斜坡式凸轮表面类似于上文关于耦合套箍176所描述完全接收或坐落在无菌接口模块530的下部部分562c的斜坡表面562x上。
在电动机械手术器械横向移动到下部部分562c中时,电动机械手术器械向上(向近侧,类似于上文关于耦合套箍176所描述)凸起以向近侧移动或压缩浮动板566。浮动板566移动到压缩位置向近侧拖曳传送轴568c、570c(和其对应的器械接合末端568e、570e)远离无菌接口模块530的下部部分562c的器械开口562i以有助于电动机械手术器械250插入到无菌接口模块530的器械开口562i中。移动浮动板566到压缩位置帮助防止在无菌接口模块530的第一和第二驱动传送组合件568、570的器械接合末端568e、570e和电动机械手术器械的对应的耦合器(例如,电动机械手术器械250的第一和第二驱动组合件256a到256d或电动机械手术器械200的近侧耦合器310)之间的插入接触/干扰。
一旦电动机械手术器械(如电外科器械250)完全坐落在无菌接口模块530的下部部分562c内,浮动板566被推动回到其延伸位置,使得无菌接口模块530的第一和第二驱动传送组合件568、570的器械接合末端568e、570e和电动机械手术器械250的第一和第二驱动组合件256a到256d的对应的耦合器开始彼此对准,以经由无菌接口模块530将电动机械手术器械250耦合到机器人手术组合件500。
在使用时,在机器人手术组合件500固定到手术机器人臂2、3中的一个并且任何电动机械手术器械200、200'、200”固定到机器人手术组合件500的情况下,临床医生可按需要用机器人手术组合件500通过以机器人方式控制(例如,电动机械手术器械250)执行手术过程。具体来说,在无菌接口模块530的可旋转轴环564安放在第二位置以分别接合外壳510和无菌接口模块530的马达和驱动耦合器52b、54b、568a、570a的情况下,马达组合件50的一个或多个马达52、54被致动以旋转马达52、54的一个或多个马达耦合器52b、54b,使得无菌接口模块530的第一和第二驱动传送组合件568、570中的一个或多个与电动机械手术器械250的第一和第二驱动组合件256a到256d中的一个或多个协作以如本文所述操作和/或操控其末端执行器252。
参考图42到44,在紧急情况下,在其中主体构件562和可旋转轴环562的上部部分562a的肩部562e、564b接合的无菌接口模块530的可旋转轴环564处于在第二高度“H2”的第二位置时,可旋转轴环564可围绕主体构件562旋转(如由箭头“B”指示),以在远侧方向上朝向无菌接口模块530的主体构件562的中间部分562b的凸缘562h轴向移动可旋转轴环564。在可旋转轴环564的第二位置,环形齿轮572与惰齿轮574纵向隔开。
如上所述,无菌接口模块530的可旋转轴环564可从第二位置移动到第一位置(任何数目的中间位置)。举例来说,例如在电源故障期间如果临床医生需要手动控制电动机械手术器械250的末端执行器252,那么临床医生可在第一和第二位置(和在第一和第二位置之间的任何数目的中间位置)之间相对于无菌接口模块530的主体构件562旋转无菌接口模块530的可旋转轴环564,以在第一和第二高度“H1”和“H2”之间相对于无菌接口模块530的主体构件562的中间部分562b的凸缘562h移动可旋转轴环564。
一旦无菌接口模块530的可旋转轴环564旋转(从第二位置朝向第一位置)通过预定的角度旋转(例如90度,但是无菌接口模块530和/或其一个或多个组件可具有任何合适的配置以产生期望预定的角度旋转),无菌接口模块530的环形齿轮572接合无菌接口模块530的惰齿轮574,以在环形齿轮572旋转并且朝向惰齿轮574向远侧轴向推进时实现惰齿轮574的旋转。惰齿轮574的旋转使无菌接口模块530的第一驱动传送组合件568的驱动齿轮568d独立于无菌接口模块530的第二驱动传送组合件570(其通常保持稳定而无需其机器人控制)旋转。在第一驱动传送组合件568的驱动齿轮568d响应于无菌接口模块530的惰齿轮574的旋转而旋转时,无菌接口模块530的第一驱动传送组合件568与电动机械手术器械250的第一驱动组合件256a协作,以有利地手动操控其末端执行器252(例如,以将其一个钳口移动到开口末端执行器252并且释放其中抓握的组织)。还预期无菌接口模块530的可旋转轴环564可按需要在相反的方向上旋转以操控(例如封闭)电动机械手术器械250的末端执行器252。
可旋转轴环564从第二位置到第一位置(和/或从第一位置到第二位置)的手动旋转,通过无菌接口模块530和电动机械手术器械250的相应的组件施加力,以手动操控电动机械手术器械250的末端执行器252以在期望方向/位置安放末端执行器252。举例来说,电动机械手术器械250的末端执行器252可手动操控到打开位置以释放通过末端执行器252抓握的组织,使得电动机械手术器械250可从手术部位移除,同时当产生电源故障或其它紧急情况时如果这类手动操控不可实行,那么限制将以其它方式存在的不期望组织损伤的风险。
为了从机器人手术组合件500移除电动机械手术器械250,例如为了执行器械更换(例如用电动机械手术器械200、250'或250”中的一个),临床医生可按压拆卸组合件254的桨254a、254b。按压桨254a、254b将力施加在无菌接口模块530的浮动板566的突片566b、566c上,以在近侧方向上相对于无菌接口模块530的主体构件562移动浮动板566。在浮动板566在近侧方向上移动时,第一和第二驱动传送组合件568、570的传送轴568c、570c随浮动板566抵抗来自第一和第二驱动传送组合件568、570的弹簧568f、570f的偏置力在近侧方向上平移。第一和第二驱动传送组合件568、570的传送轴568c、570c相对于无菌接口模块530的主体构件562的移动分离第一和第二驱动传送组合件568、570的传送轴568c、570c的器械接合末端568e、570e与电动机械手术器械250的相应的第一和第二驱动组合件256a到256d的接合耦合器258。一旦第一和第二驱动传送组合件568、570的传送轴568c、570c的器械接合末端或齿轮或耦合器568e、570e与电动机械手术器械250的相应的第一和第二驱动组合件256a到256d的接合耦合器258分离,电动机械手术器械250的器械外壳253的近侧末端可从主体构件562的下部部分562c的器械开口562i横向滑出。
电动机械手术器械250可通过如上所述的主体构件562的下部部分562c的器械开口562i重新附接。替代地,不同电动机械手术器械(如器械200、内窥镜250'或抓紧器250”)可同样地按需要附接。
现在转向图48到58,根据本公开的另一个实施例的机器人手术组合件一般表示为600。机器人手术组合件600类似于机器人手术组合件500,并且因此将本文仅进一步详细描述到描述其构造和使用之间的差别的必要程度。机器人手术系统1的机器人手术组合件600包括支撑马达组合件或马达组650的器械驱动单元或外壳610(图58)。机器人手术组合件600的外壳610包括连接器组合件640。
环构件550被配置成用于可旋转附接到连接器组合件640的远侧末端(例如经由搭扣配合)。无菌帷帘552可按需要围绕外壳610、机器人手术组合件600和机器人臂2、3布置,以在各种前述组件和/或手术部位/流体和电动机械手术器械200(图2)、250、250'或250”之间提供无菌屏障。
提供轴环组合件或无菌接口模块630用于选择性地互连机器人手术组合件600和电动机械手术器械200、250、250'或250”中的任一个。
如在图49到53中所见,轴环组合件或无菌接口模块630包括耦合在电连接器632a、632b之间的电连接器632a、632b和电带状物(未示出),以在机器人手术组合件600和耦合到其的任何电动机械手术器械(如电动机械手术器械250)之间提供电通信。电连接器632a、632b可通过紧固件697耦合到无菌接口模块630。
参考图49到56,无菌接口模块630包括具有上部部分662a、通过紧固件698固定到上部部分662a的中间部分662b和通过紧固件699固定到中间部分662b的下部部分662c的主体构件662。主体构件662的上部部分662a限定围绕上部部分662a从上部部分662a的肩部662e延伸的螺旋通道662d。上部部分662a进一步包括从上部部分662a向近侧延伸的一对附接臂662f、662g,以将无菌接口模块630固定到机器人手术组合件600的外壳610的连接器组合件640。所述一对附接臂662f、662g可以镜像关系安置在上部部分662a的相对侧上。
参考图49到51,主体构件662的中间部分662b包括凸缘662h并且可旋转地支撑可旋转轴环664在其上。中间部分662b限定在其侧表面中间中的隔开开口662m。保险夹663可搭扣配合到主体构件162的中间部分662b的夹接收凹槽662m中,以将保险夹663固定到无菌接口模块630上在可旋转轴环664和主体构件662的中间部分662b的凸缘662h之间的位置处。保险夹663可采取大于180°延伸的半圆形套箍的形式并且由弹性材料形成。保险夹163像块或制动器起作用以防止朝向主体构件662的中间部分662b的凸缘662h接近可旋转轴环664,以由此抑制朝向中间部分662b的凸缘662h无意接近可旋转轴环664。在致动可旋转轴环664之前,如上所述,保险夹663必须首先从可旋转轴环664和中间部分662b的凸缘662h之间移除。保险夹663可包括从其径向向内延伸的结块等663a并且被配置成用于接收或安置在主体构件662的中间部分662b内形成的开口662m内。
无菌接口模块630的可旋转轴环664限定从可旋转轴环664的肩部664b延伸的螺旋通道664a。可旋转轴环664的螺旋通道664a和可旋转轴环664的肩部664b补充主体构件662的上部部分662a的螺旋通道662d和主体构件662的上部部分662a的肩部662e。可旋转轴环664进一步包括夹持沟槽664c以有助于可旋转轴环664相对于无菌接口模块630的主体构件662的用户夹持和/或致动。可旋转轴环664还包括从可旋转轴环664向远侧延伸的唇缘664d并且可与保险夹663接合,以如上文所讨论使得保险夹能够防止可旋转轴环664朝向中间部分662b的凸缘662h移动。可旋转轴环664还可包括限定在其上或其中的标志664e(例如一个或多个箭头)以为临床医生提供信息。在一些实施例中,标志可提供操作指令。
无菌接口模块630的主体构件662的下部部分662c呈经由紧固件699固定到主体构件662的中间部分662b的远侧末端的半环形耦合套箍形式。主体构件662的下部部分662c包括具有向远侧和横向限定在侧臂662j、662k和开口之间的器械开口662i的U形主体。下部部分662c进一步包括补充互补电动机械手术器械的外壳的斜坡式凸轮表面(例如电动机械手术器械200的外壳212的斜坡式凸轮表面218)的斜坡表面662x(图49)。器械开口662i被配置成在其中接收电动机械手术器械(如电动机械手术器械250),以将电动机械手术器械250可移除固定到机器人手术组合件600。下部部分662c的侧臂662j、662k从主体构件662的中间部分662b向远侧延伸并且被安放以当电动机械手术器械250接收在其中(例如经由侧装载)时支撑电动机械手术器械250在下部部分662c的器械开口662i内。
类似于无菌接口模块530的浮动板566,无菌接口模块630进一步包括支撑在主体构件662的中间部分662b和主体构件662的下部部分662c之间的浮动板666。浮动板666在未压缩位置或延伸位置和压缩或缩回位置之间可移动。浮动板666为通过安置在浮动板666和主体构件662的中间部分662b之间的弹簧665a和通过无菌接口模块630的驱动传送组合件(例如668、670)的弹簧朝向未压缩位置向远侧偏置的弹簧。在下部浮动板666的未压缩位置,浮动板666与中间部分662b的底表面662l隔开距离“E”(参见图55)。浮动板666包括基部部分666a和从基部部分666a向远侧延伸的突片666b、666c。突片666b、666c延伸通过主体构件662的下部部分662c。浮动板666限定在其中的接收无菌接口模块630的第一和第二驱动传送组合件668、670的孔隙666d、666e。
参考图49到52和58,无菌接口模块630的第一和第二驱动传送组合件668、670包括限定与支撑在外壳610内的马达组合件650的相应的马达耦合器652a、654a的耦合末端626可接合的耦合件末端668b、670b的相应的驱动耦合器668a、670a。第一驱动传送组合件668包括传送轴668c,并且第二驱动传送组合件670包括传送轴670c。相应的第一和第二驱动传送组合件668、670的传送轴668c、670c延伸到在其远侧末端处的相应的器械接合末端或耦合器668e、670e(例如具有向远侧延伸的齿的齿轮等)。第一驱动传送组合件668的传送轴668c进一步包括接近传送轴668c的器械接合末端668e支撑的驱动耦合器或齿轮668d。
相应的偏置构件或弹簧668f、670f支撑在相应的第一和第二驱动传送组合件668、670中的每个的驱动耦合器668a、670a和传送轴668c、670c之间,使得每个弹簧668f、670f被配置成在其压缩时将弹簧力施加到其相应的第一或第二驱动传送组合件668、670。驱动传送组合件668、670的偏置构件668f、670f可为压缩弹簧。第一和第二驱动传送组合件668、670的驱动耦合器668a、670a限定在其中的可滑动地接收从第一和第二驱动传送组合件668、670的传送轴668c、670c延伸的翼668h、670h的侧槽668g、670g。传送轴668c、670c的翼668h、670h被配置成响应于在传送轴668c、670c中的一个和其相应的驱动耦合器668a、670a之间的相对移动,滑动通过第一和第二驱动传送组合件668、670的侧槽668g、670g(例如以“十字滑块”耦合件的方式)。
无菌接口模块630进一步包括支撑在无菌接口模块630的可旋转轴环664的内表面上的环耦合器或齿轮672。无菌接口模块630包括通过无菌接口模块630的主体构件662的中间部分662b支撑的惰轮耦合器或齿轮674。惰齿轮674与第一驱动传送组合件668的驱动齿轮668d啮合,并且响应于可旋转轴环664的旋转移动,选择性地可与环形齿轮672接合(参见图55和56)。
无菌接口模块630进一步包括被配置成横向支撑第一和第二驱动传送组合件668、670的支撑板676、678。支撑板676通常支撑在主体构件662的上部部分662a和主体构件662的中间部分662b之间。
如在图55和56中所见,无菌接口模块630的支撑板676固定在限定在环形齿轮672和可旋转轴环664的内表面之间的支撑通道664c内,使得在如本文中详述的保险夹663移除的情况下,在相对于无菌接口模块630的主体构件662的上部部分662a轴向移动支撑板676时,可旋转轴环664可围绕支撑板676旋转。支撑板676耦合到第一和第二驱动传送组合件668、670的驱动耦合器668a、670a的凸缘668z、670z,以在支撑板676随无菌接口模块630的可旋转轴环664轴向移动时,相对于第一和第二驱动传送组合件668、670的传送轴668c、670c轴向移动驱动耦合器668a、670a。在无菌接口模块630的可旋转轴环664在第一和第二位置(和在第一和第二位置之间任何数目的中间位置)之间移动时,驱动耦合器668a、670a的轴向移动使得驱动器耦合器668a、670a能够选择性地接合到外壳610的马达组合件50的马达耦合器652a、654a(图58)/和从马达耦合器652a、654a解开。马达组合件650的马达耦合器652b、654b与无菌接口模块630的相应的驱动耦合器668a、670a,在无菌接口模块630的可旋转轴环664处于第二位置(图55和58)时接合,和在无菌接口模块630的可旋转轴环664处于第一位置(图56)时解开。
为了将电动机械手术器械(如电动机械手术器械250)耦合到无菌接口模块630,电动机械手术器械的外壳的斜坡式凸轮表面(参见例如电动机械手术器械200的外壳212的斜坡式凸轮表面218)与无菌接口模块630的下部部分662c的对应的斜坡表面662x对齐。电动机械手术器械250随后相对于机器人手术组合件600横向移动(例如侧装载)直到坐落在无菌接口模块630的下部部分662c的斜坡表面662x上,类似于上文关于耦合套箍176和无菌接口模块530所描述。
在电动机械手术器械250横向移动到下部部分662c中时,如上所述,浮动板566被朝向其压缩位置推动抵靠第一和第二驱动传送组合件668、670的弹簧偏置和从浮动板666向近侧延伸的弹簧665的弹簧偏置。浮动板666移动到压缩位置向近侧拖曳传送轴668c、670c(和其对应的器械接合末端668e、670e)远离无菌接口模块630的下部部分662c的器械开口662i以有助于电动机械手术器械250插入到无菌接口模块630的器械开口662i中。移动浮动板666到压缩位置帮助防止在第一和第二驱动传送组合件668、670的器械接合末端668e、670e和电动机械手术器械250的第一和第二驱动组合件256a到256d的对应的齿轮或耦合器之间插入接触/干扰。
一旦电动机械手术器械250完全坐落在无菌接口模块630的下部部分662c内,响应于弹簧665和第一和第二驱动传送组合件668、670的弹簧偏置,浮动板666被推动回到其延伸位置,使得无菌接口模块630的第一和第二驱动传送组合件668、670的器械接合末端668e、670e和电动机械手术器械250的第一和第二驱动组合件256a到256d的对应的齿轮或耦合器开始彼此对准,以经由无菌接口模块630将电动机械手术器械250耦合到机器人手术组合件600。
在使用时,在机器人手术组合件600固定到手术机器人臂2、3中的一个并且任何电动机械手术器械200、250、250'、250”固定到机器人手术组合件600的情况下,临床医生可按需要用机器人手术组合件600通过以机器人方式控制(例如,电动机械手术器械250)执行手术过程。具体来说,在无菌接口模块630的可旋转轴环664安放在第二位置的情况下,马达组合件50可致动,以使得无菌接口模块530的第一和第二驱动传送组合件668、670中的一个或多个与电动机械手术器械250的第一和第二驱动组合件256a到256d中的一个或多个协作,例如以如本文所述操作和/或操控其末端执行器252,类似于上文关于机器人手术组合件500所描述。
参考图51、54到56和58,在紧急情况(例如电源故障)下,在环形齿轮672与惰齿轮674纵向间隔开的情况下,在无菌接口模块630的可旋转轴环664处于第二位置时,保险夹663从无菌接口模块630手动移除。一旦移除保险夹663,可旋转轴环664可围绕主体构件662手动旋转,如由箭头“F”(图54)指示,以在远侧方向上朝向无菌接口模块630的主体构件662的中间部分662b的凸缘662h轴向移动可旋转轴环664,以分离第一和第二驱动传送组合件668、670的驱动耦合器668a、670a与外壳610的马达组合件650的马达耦合器652a、654a,类似于上文关于无菌接口模块530所描述。
另外,类似于无菌接口模块530,无菌接口模块630的可旋转轴环664可通过预定的角度旋转从第二位置朝向第一位置旋转。在环形齿轮672耦合到可旋转轴环664的情况下,这类旋转使得无菌接口模块630的环形齿轮672能够接合无菌接口模块630的惰齿轮674,以在环形齿轮672旋转并且朝向惰齿轮674向远侧轴向推进时引起惰齿轮674的旋转。惰齿轮674的旋转使无菌接口模块630的第一驱动传送组合件668的驱动齿轮668d独立于无菌接口模块630的第二驱动传送组合件670(其通常保持稳定而无需其机器人控制)旋转。
在第一驱动传送组合件668的传动齿轮668d响应于无菌接口模块630的惰齿轮674的旋转而旋转时,无菌接口模块630的第一驱动传送组合件668与电动机械手术器械250的第一驱动组合件256a协作,以有利地手动操控其末端执行器252,类似于上关于无菌接口模块530文所描述。
为了从机器人手术组合件600移除电动机械手术器械250,例如以执行器械更换(例如用电动机械手术器械200、250'或250”中的一个),临床医生可按下电动机械手术器械250的拆卸组合件254的桨254a、254b,以将电动机械手术器械250从机器人手术组合件600释放,类似于上文关于机器人手术组合件500所描述。具体来说,按压电动机械手术器械250的拆卸组合件254的桨254a、254b移动浮动板666以抵靠无菌接口模块630的弹簧的偏置移动到压缩位置,以使得电动机械手术器械250能够从其主体构件662的下部部分662c的器械开口662i横向滑出,类似于上文关于无菌接口模块530所描述。
电动机械手术器械250可按需要通过主体构件662的下部部分662c的器械开口662i重新附接。替代地,不同电动机械手术器械(如器械200、内窥镜250'或抓紧器250”)可同样地按需要附接。
电动机械手术器械的一些实施例的驱动构件380和/或连接器构件“CM”(参见图15和36)可包括任何合适的材料,如不锈钢、钨、聚合物等。这类材料可包括一个或多个涂层,涂层可包括一个或多个层。这些涂层可包括聚合材料,如任何合适的聚(对苯二甲)聚合物(例如聚对二甲苯等)。这些聚合材料中的任一种可通过任何合适的技术(如化学气相沉积等)形成。这类涂层被配置成提高驱动构件380和/或连接器构件“CM”的可靠性和/或寿命周期。有利地,聚(对苯二甲)聚合物(如聚对二甲苯)为生物相容的并且对于施加到几乎任何表面(例如电缆)提供低摩擦和润滑性。举例来说,本发明所描述的电动机械手术器械可包括由涂布有聚(对苯二甲)聚合物(如聚对二甲苯)的钨电缆形成的驱动或连接部件以便提供较长器械寿命。此外,这类聚(对苯二甲)聚合物提供电介质阻挡。聚(对苯二甲)聚合物涂层保护钨电缆(和钨电缆的任何内部润滑剂)免受洗涤和/或高压加热处理程序。此外,聚(对苯二甲)聚合物涂层在钨电缆和钨电缆骑乘的滑轮之间提供保护层。在某些实施例中,一个或多个涂层可包括聚四氟乙烯(例如铁氟龙)等材料。
任何本发明所描述的无菌接口模块或其部分可由介电材料(例如任何合适的聚合物)形成和/或充当介电质以防止电流泄漏。举例来说,一种合适的聚合物可包括聚苯砜(例如 R-5100)等。在一些实施例中,本发明所描述的无菌接口模块被配置成电隔离专用电烙电缆,如电外科电缆599(参见图45)等与其它电组件,如用于信息传输的那些(例如电连接器532a、632a、电带状物534等)。另外,电外科电缆和/或任何电组件,如电连接器532a,可相对于彼此以预定的隔开位置安放,由此在这类组件之间的预定距离可充当介电质。
R-5100)等。在一些实施例中,本发明所描述的无菌接口模块被配置成电隔离专用电烙电缆,如电外科电缆599(参见图45)等与其它电组件,如用于信息传输的那些(例如电连接器532a、632a、电带状物534等)。另外,电外科电缆和/或任何电组件,如电连接器532a,可相对于彼此以预定的隔开位置安放,由此在这类组件之间的预定距离可充当介电质。
在一些实施例中,本发明所描述的无菌接口模块或其部分可耐高压加热。
参考图59,机器人手术系统的一个实施例包括与机器人臂2或3(参见图1)中的一个耦合或耦合到其的机器人手术组合件1100。机器人手术组合件1100包括手术器械保持器1102、器械驱动单元1110和电动机械手术器械,如电动机械手术器械1200。器械驱动单元1110将来自其马达的动力和致动力传送到电动机械手术器械1200的从动构件(未示出)以最终驱动电动机械手术器械1200的末端执行器1210的组件的移动,例如刀片(未示出)的移动和/或末端执行器1210的钳口构件的闭合和打开、钉合器的致动或起动和/或电外科能量类器械的启动或起动等。器械驱动单元1110的马达组合件1114(图67和68)通过支撑在手术器械保持器1102中的马达“M”旋转并且将其旋转运动传送到电动机械手术器械1200。
参考图59、60A、60B和61,手术组合件1100的手术器械保持器1102用以致动器械驱动单元1110的马达组合件1114(图68)的旋转。手术器械保持器1102包括背面构件或托架1104,和从托架1104的末端1104b横向(例如垂直)延伸的外部构件或外壳1106。在一些实施例中,外壳106可相对于托架1104以各种角度并且从托架1104的各种部分延伸。托架1104具有第一侧1108a和与第一侧1108a相对的第二侧1108b。托架1104的第一侧1108a可拆卸地可连接到机器人臂2的轨40,以使得手术器械保持器1102能够沿机器人臂2(参见图1)的轨40滑动或平移。托架1104的第二侧1108b被配置成不可旋转地支撑器械驱动单元1110的外壳或外部壳1112。
手术器械保持器1102的托架1104支撑或容纳马达,例如罐马达“M”在其中。马达“M”接收来自控制装置4(图1)的控制和动力以最终旋转器械驱动单元1110的马达组合件1114,如下文将详细描述。在一些实施例中,托架1104可包括与马达“M”电通信的印刷电路板1107,以控制托架1104的马达“M”的操作。托架1104具有从马达“M”延伸并且纵向通过托架1104的可旋转驱动轴1109。托架1104进一步包括不可旋转地连接到马达“M”的驱动轴1109以将马达“M”的驱动轴1109的旋转传送到手术器械保持器1102的驱动组合件1150的滑轮1154的轴耦合件1116。
参考图60A到64B,手术器械保持器1102的外壳1106限定通过其的被配置成在其中可旋转地接收和支撑器械驱动单元1110的通道1118。外壳1106具有大体长方半圆形状,但是在一些实施例中,外壳1106可采用多种形状,例如C形、U形、V形、钩形等。手术器械保持器1102的外壳1106进一步被配置成容纳或保留驱动组合件1150的组件,其下文将详细描述。
具体参考图62、63、64A和64B,手术器械保持器1102的外壳1106通常包括限定在其中的壳体1122的侧壁1120和连接到侧壁1120的顶部部分的顶板1124。侧壁1120具有具有半圆形配置的第一部分1120a和具有正方形或矩形配置的第二部分1120b。侧壁1120的第一部分1120a具有从侧壁1120的顶部部分向内延伸到壳体1122中的脊或凸耳1126a。顶部凸耳1126a限定在其中的被配置成用于接收驱动组合件1150的第一轴承1153a的一部分的切口1128a。第一轴承1153a具有大约50到70毫米,例如约60毫米的内径,大约50到70毫米,例如约66毫米的外径,大约1到4毫米,例如约2.5毫米的宽度,和大约5到15克,例如约9克的质量。外壳1106进一步包括安置在壳体1122内的基部1130。
基部1130连接到侧壁1120的底部。基部1130包括限定通过其的圆形通道1118的圆形内表面1132。圆形通道1118被配置成用于接收驱动组合件1150的环形构件1182。基部1130进一步包括从基部1130的内表面1132向内延伸到中心通道1118中的底部脊或凸耳1126b。底部凸耳1126b限定在其中的被配置成用于接收驱动组合件1150的第二轴承1153b的切口1128b,类似于上文所描述的第一轴承1153a。外壳1106的顶部和底部凸耳1126a、1126b协作地限定在其间的被配置成用于可滑动接收驱动组合件1150的带1160的沟槽1134。
外壳1106进一步包括从基部1130向上延伸的弧形或弓形壁1136,并且部分围绕中心通道1118邻近侧壁1120的第二部分1120b安置。外壳1106的弓形壁1136具有延伸到壳体122中并且从弓形壁1136的内表面1140向外延伸的顶部脊或凸耳1138。弓形壁1136的顶部凸耳1138与侧壁1120的第一部分1120a的顶部凸耳1126a共面,使得顶部凸耳1126a、1138为预装载的弹簧(例如波形弹簧)提供空隙。
参考图61到66,手术器械保持器1102的驱动组合件1150被配置成当器械驱动单元1110可操作地接收在手术器械保持器1102内时,将手术器械保持器1102的马达“M”的驱动轴1109的旋转转换成器械驱动单元1110的马达组合件1114(图68)的旋转运动。驱动组合件1150包括可旋转地安置在外壳1106内的从动轴1152。从动轴1152具有近侧末端1152a和远侧末端1152b。从动轴1152的近侧末端1152a向近侧延伸通过外壳1106的顶板1124。从动轴1152的远侧末端1152b向远侧延伸通过外壳1106的基部1130。驱动组合件1150的从动轴1152可旋转地保留在外壳1106内。
如在图61中所示,托架1104的马达“M”、托架1104的驱动轴1109和驱动组合件1150的从动轴1152各自彼此成一直线。从动轴1152的近侧末端1152a不可旋转地连接到托架1104的轴耦合件1116,使得马达“M”的驱动轴1109的旋转引起轴耦合件1116旋转,并且继而驱动组合件1150的从动轴1152旋转。
继续参考图61到66,驱动组合件1150包括第一滑轮1154和第二滑轮1156;各自安置在限定在外壳1106的弓形壁1136和外壳1106的侧壁1120之间的空间1142内,并且具体地说在侧壁1120的第二部分1120b的相应的相对拐角1144a、1144b处。从动轴1152的远侧末端1152b不可旋转地连接到第一滑轮1154,使得从动轴1152的旋转影响第一滑轮1154相对于外壳1106的旋转。第一和第二滑轮1154、1156可选择性地在外壳1106内可移动到外壳1106的不同位置。第一和第二滑轮1154、1156可各自呈齿轮(例如具有从其周边径向延伸的齿1158的正齿轮)形式。在一些实施例中,第一和第二滑轮1156可具有平滑外表面而没有齿。
驱动组合件1150进一步包括可旋转地和/或可平移接收在外壳1106内的驱动条带或带1160。带1160为封闭回路并且由易弯的材料构造,使得带1160可被操控成任何合适的形状。具体来说,带1160在接收在外壳1106中时取外壳1106的长方半圆形状。在一些实施例中,带1160可由刚性材料形成并且具有对应于外壳1106的壳体1122的形状的永久长方半圆形状。带1160可具有从其内表面延伸的齿1162。带1160围绕第一和第二滑轮1154、1156缠绕,使得带1160的齿1162与第一和第二滑轮1154、1156的齿1158可操作接合。以此方式,由致动托架1104的马达“M”引起的第一滑轮1154的旋转引起带1160围绕第一和第二滑轮1154、1156旋转。第二滑轮1156充当惰轮滑轮以引导带1160围绕外壳1106的侧壁1120的内周边。预期第二滑轮1156可选择性地移动到多个位置以影响带1160上的张紧/带1160的张紧。
参考图66A,在一个实施例中,驱动组合件150可包括被配置成调节带1160上的张紧/带1160的张紧的张紧组合件1164。具体来说,张紧组合件1164可放置在限定在外壳1106的弓形壁1136和外壳1106的侧壁1120之间的空间1142内,并且在第一和第二滑轮1154、1156之间延伸。张紧组合件1164包括第一轴组合件1166、第二轴组合件1168和盘簧1170。
第一轴组合件1166处于在外壳1106内的固定位置,并且包括邻近第一滑轮1154安置的块1172,和从块1172并且沿与第一和第二滑轮1154、1156相交的轴线延伸的轴1174。第二轴组合件1168包括邻近滑轮滑板1180安置的块1176和从块1176延伸的管状轴1178。参考图66B,滑轮滑板1180围绕轴1181可旋转地支撑第二滑轮1156并且包括与块1176接触的接合突片1180a。第二轴组合件1168的管状轴1178具有延伸通过其的第一轴组合件1166的轴1174并且沿第一轴组合件1166的轴1174可滑动。盘簧1170围绕管状轴1178安置并且捕获在相应的第一和第二轴组合件1166、1168的块1172、1176之间,以将第二轴组合件1168的块1176弹性偏置远离第一轴组合件1166的块1172。盘簧1170推压块1176,这推压滑轮滑板1180以偏置第二滑轮1156远离第一滑轮1154并且调节(例如提高)带1160的张紧。滑轮滑板1180和其组件响应于块1176的纵向平移,沿由轴1174限定的轴线可滑动(例如以调节带1160的张紧)。
为了调节由张紧组合件1164贡献的张紧的量,多个盘簧(各自具有不同弹簧力)可互换盘簧1170。替代地,为了调节带1160的张紧,张紧组合件1164可相对于第二滑轮1156移动到不同位置。
继续参考图62、64B和65B,驱动组合件1150包括可旋转地安置在外壳106的通道1118内在驱动组合件1150的第一和第二轴承1153a、1153b之间的杯状环形构件1182。环形构件1182包括环1184和安置在环1184内的环形基板或盘1186。环184具有从其外表面径向延伸的多个齿1188。在环形构件1182可旋转地坐落在驱动组合件1150的第一和第二轴承1153a、1153b之间的情况下,环形构件1182的齿1188与带1160的齿1162可操作接合。就此而言,带1160通过第一滑轮154的旋转沿外壳106的侧壁120的内周边的移动引起环形构件1182在外壳1106的通道1118内旋转。
在一些实施例中,第一滑轮1154和带1160不具有用于传送在彼此之间的旋转运动的齿。相反,旋转经由带1160的平滑内表面与第一滑轮1154的平滑外表面的摩擦接合在第一滑轮1154和带1160之间传送。预期驱动组合件1150的每个组件可从外壳1106可移除以有助于组装、修理和调节驱动组合件1150。
参考图64B、65B、67和68,环形构件1182的环形基板1186和环形构件1182的环1184的内表面1190协作地限定被配置成用于接收器械驱动单元1110的圆柱形腔1192。环形基板1186限定通过其的被配置成用于接收器械驱动单元1110的各种驱动轴(未示出)的多个孔1194。在器械驱动单元1110的驱动轴延伸通过环形基板1186的孔1194的情况下,环形构件1182经由带1160的旋转导致器械驱动单元1110的马达组合件1114相对于手术器械保持器1102的外壳1106旋转,如下文将详细描述。
为了组装驱动组合件1150,带1160降入外壳1106中以加衬外壳1106的侧壁1120的内周边并且延伸通过限定在外壳106的上部和下部凸耳1128a、1128b之间的沟槽1134。第一轴承1153a被按压到环形构件1182的上部部分上并且第二轴承1153b按压到环形构件1182的下部部分上。具有第一和第二轴承1153a、1153b的环形构件1182降入外壳1106的通道1118中并且支撑在外壳1106的上部和下部凸耳1128a、1128b之间。第一和第二滑轮1154、1156安装在外壳1106的相对拐角1144a、1144b中,使得带1160围绕第一和第二滑轮1154、1156并且围绕环形构件1182缠绕。在组装的此阶段,带1160可被拉伸。盖板1124随后固定到外壳1106的顶部部分。
参考图67和68,手术组合件1100的器械驱动单元1110包括外部外壳1112和可旋转地安置在外部外壳1112内的内外壳或马达组合件1114。外部外壳1112接合到手术器械保持器1102的托架1104的第二侧1108b并且容纳器械驱动单元1110的各种组件。器械驱动单元1110的外部外壳1112具有大体圆柱形配置,但是在一些实施例中,外部外壳1112可采用多种配置,例如平方形、细长、管状等。
器械驱动单元1110的外部壳体1112被配置和尺寸被设定成在其中可滑动地接收马达组合件、马达组等1114。马达组合件1114可包括四个马达“M1到M4”,例如罐马达等,各自具有具有非圆形横向横截面轮廓(例如大体上D形等)的驱动轴(未明确示出)。四个马达被布置成矩形形式使得其相应的驱动轴均彼此平行并且均在共同方向上延伸。在马达组合件1114的马达致动时,马达的驱动轴的旋转经由相应的驱动传送轴(未示出)传送到手术器械1200的驱动组合件(未示出)的齿轮(未示出),以致动手术器械1200的各种功能。此外,如上文提到,当器械驱动单元1110安置在手术器械保持器1102的驱动组合件1150的环形构件1182内时,马达组合件1114的每个马达的驱动轴延伸通过环形构件1182的环形基板1186的孔1194。
在操作中,手术器械保持器1102的托架1104附接到机器人臂2的轨40。器械驱动单元1110安放在驱动组合件1150的环形构件1182内并且支撑在手术器械保持器1102的托架1104的侧1108b上,使得器械驱动单元1110的马达组合件1114的驱动轴(未示出)延伸通过限定在环形构件1182的环形基板1186中的相应的孔1194。手术器械1200的近侧末端1202(图59)的从动轴(未示出)不可旋转地连接到器械驱动单元1110的马达组合件1114的驱动轴。
操作手术系统的手工输入装置7、8(图1)的临床医生可致动手术器械保持器1102的马达“M”以最终影响手术器械1200的旋转以使手术器械1200取向成在手术部位内的特定位置。具体来说,致动手术器械保持器1102的马达“M”驱动手术器械保持器1102的马达轴1109的旋转,这经由轴耦合件1116将其旋转运动传送到驱动组合件150的从动轴1152。由于第一滑轮1154不可旋转地连接到从动轴1152,驱动组合件1150的从动轴1152的旋转影响第一滑轮1154的旋转。因为驱动组合件1150的带160与驱动组合件1150的第一滑轮1154可操作接合,并且驱动组合件1150的环形构件1182与带1160可操作接合,所以第一滑轮1154的旋转引起驱动组合件1150的带1160旋转,并且继而引起驱动组合件150的环形构件1182旋转。
在器械驱动单元1110的马达组合件1114的驱动轴捕获在驱动组合件1150的环形构件1182的环形基板1186的孔1194中的情况下,在手术器械保持器1102的外壳1106内的驱动组合件1150的环形构件1182的旋转驱动器械驱动单元1110的马达组合件1114相对于器械驱动单元1110的外部外壳1112旋转。在一些实施例中,器械驱动单元1110的马达组合件1114可经由任何合适的方法(例如摩擦配合、非圆形互补配合表面,或任何合适的固定件)不可旋转地接收在驱动组合件1150的环形构件1182内。在某些实施例中,马达组合件1114栓接到环形构件1182。在手术器械200的近侧末端1202不可旋转地耦合到器械驱动单元1110的马达组合件1114的情况下,器械驱动单元1110的马达组合件1114的旋转导致手术器械200围绕其纵向轴线“X”旋转。
本领域的技术人员应理解,本文具体描述且在附图中示出的结构和方法是非限制性示例性实施例,并且描述、公开内容和图应仅认为是示例性特定实施例。因此,应理解,本公开不限于所描述的精确实施例,并且本领域的技术人员可在不脱离本公开的范围或精神的情况下实现各种其它改变和修改。另外,可在不脱离本公开的范围的情况下,结合某些实施例示出或描述的元件和特征可与某些其它实施例的元件和特征组合,并且这类修改和变化也包括在本公开的范围内。因此,本公开的主题不受已具体示出和描述的内容限制。
Claims (20)
1.一种无菌接合部模块,其用于将机电式机器人手术器械联接到机器人手术组合件,所述手术器械包含末端执行器并且配置成由所述机器人手术组合件致动,所述无菌接合部模块包括:
主体构件,其配置成选择性地将所述手术器械联接到所述机器人手术组合件,所述主体构件由介电材料形成;
驱动组合件,其支撑在所述主体构件内并且配置成将旋转力从所述机器人手术组合件传递到所述手术器械以致动所述手术器械,以使所述手术器械能够执行功能;和
可旋转轴环,其支撑在所述主体构件上,其中所述可旋转轴环配置成响应于所述可旋转轴环的旋转而相对于所述主体构件在第一位置与第二位置之间轴向移动,所述可旋转轴环配置成:在从所述第二位置朝向所述第一位置移动时,使所述驱动组合件与所述机器人手术组合件脱离并且所述可旋转轴环可操作地联接到所述驱动组合件。
2.根据权利要求1所述的无菌接合部模块,其中所述主体构件支撑电连接器,所述电连接器以电气方式在所述机器人手术组合件与所述手术器械之间传送信息。
3.根据权利要求2所述的无菌接合部模块,其中所述主体构件支撑电手术连接构件,所述电手术连接构件配置成将电手术能量从所述机器人手术组合件传递到所述手术器械。
4.根据权利要求3所述的无菌接合部模块,其中所述电手术连接构件与所述电连接器电隔离。
5.根据权利要求1所述的无菌接合部模块,其中所述驱动组合件包含驱动联接件和从所述驱动联接件延伸的传动轴,所述驱动联接件能够与所述机器人手术组合件接合,并且所述传动轴能够与所述手术器械接合,所述驱动联接件和传动组合件能够机械地移动以操作所述手术器械的所述末端执行器。
6.根据权利要求1所述的无菌接合部模块,其进一步包括固定到所述可旋转轴环的环形齿轮、固定到所述驱动组合件的传动轴的驱动齿轮,以及支撑在所述驱动齿轮与所述环形齿轮之间的惰齿轮。
7.根据权利要求6所述的无菌接合部模块,其中当所述可旋转轴环在第一位置与第二位置之间旋转时,所述环形齿轮能够选择性地与所述惰齿轮接合。
8.根据权利要求1所述的无菌接合部模块,其进一步包括联接到所述主体构件的浮置板,其中所述浮置板能够相对于所述主体构件移动,以便于所述手术器械选择性地连接到所述主体构件。
9.根据权利要求8所述的无菌接合部模块,其中所述浮置板是弹簧偏置的。
10.一种机器人手术系统,其包括:
机电式机器人手术器械;
机器人手术组合件;和
无菌接合部模块,其具有由介电材料形成的主体构件,所述主体构件配置成选择性地将所述手术器械联接到所述机器人手术组合件,以维持所述机器人手术组合件与所述手术器械之间的无菌状态,所述主体构件支撑驱动组合件,所述驱动组合件配置成将旋转力从所述机器人手术组合件传递到所述手术器械以致动所述手术器械,
所述无菌接合部模块进一步包含支撑在所述无菌接合部模块的所述主体构件上的可旋转轴环,其中所述可旋转轴环配置成响应于所述可旋转轴环的旋转而相对于所述主体构件在第一位置与第二位置之间轴向移动,所述可旋转轴环配置成:在从所述第二位置朝向所述第一位置移动时,使所述驱动组合件与所述机器人手术组合件脱离并且所述可旋转轴环可操作地联接到所述驱动组合件。
11.根据权利要求10所述的机器人手术系统,其中所述无菌接合部模块的所述主体构件支撑电连接器,所述电连接器在所述主体构件联接到所述机器人手术组合件和所述手术器械的同时以电气方式在所述机器人手术组合件与所述手术器械之间传送信息。
12.根据权利要求11所述的机器人手术系统,其中所述无菌接合部模块的所述主体构件支撑电手术连接构件,所述电手术连接构件配置成将电手术能量从所述机器人手术组合件传递到所述手术器械。
13.根据权利要求12所述的机器人手术系统,其中所述电手术连接构件与所述电连接器电隔离。
14.根据权利要求10所述的机器人手术系统,其中所述手术器械包含末端执行器,并且其中所述无菌接合部模块的所述驱动组合件包含驱动联接件和从所述驱动联接件延伸的传动轴,所述驱动联接件能够与所述机器人手术组合件接合,并且所述传动轴能够与所述手术器械接合,所述驱动联接件和传动组合件能够机械地移动以操作所述手术器械的所述末端执行器。
15.根据权利要求10所述的机器人手术系统,其中所述无菌接合部模块进一步包含固定到所述可旋转轴环的环形齿轮、固定到所述驱动组合件的传动轴的驱动齿轮,以及支撑在所述驱动齿轮与所述环形齿轮之间的惰齿轮。
16.根据权利要求15所述的机器人手术系统,其中当所述可旋转轴环在第一位置与第二位置之间旋转时,所述环形齿轮能够选择性地与所述惰齿轮接合。
17.根据权利要求15所述的机器人手术系统,其中所述环形齿轮在第一位置与第二位置之间旋转,以选择性地使所述驱动齿轮与所述机器人手术组合件脱离。
18.根据权利要求15所述的机器人手术系统,其中所述可旋转轴环的旋转导致所述可旋转轴环的轴向运动以及所述惰齿轮与所述可旋转轴环之间的选择性接合。
19.根据权利要求10所述的机器人手术系统,其中所述无菌接合部模块进一步包含联接到所述无菌接合部模块的所述主体构件的浮置板,其中所述浮置板能够相对于所述无菌接合部模块的所述主体构件移动,以便于所述手术器械选择性地连接到所述无菌接合部模块的所述主体构件。
20.根据权利要求19所述的机器人手术系统,其中所述无菌接合部模块的所述浮置板是弹簧偏置的。
Applications Claiming Priority (15)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662341748P | 2016-05-26 | 2016-05-26 | |
| US201662341701P | 2016-05-26 | 2016-05-26 | |
| US201662341761P | 2016-05-26 | 2016-05-26 | |
| US201662341714P | 2016-05-26 | 2016-05-26 | |
| US201662341774P | 2016-05-26 | 2016-05-26 | |
| US201662341804P | 2016-05-26 | 2016-05-26 | |
| US201662341720P | 2016-05-26 | 2016-05-26 | |
| US62/341,701 | 2016-05-26 | ||
| US62/341,761 | 2016-05-26 | ||
| US62/341,748 | 2016-05-26 | ||
| US62/341,774 | 2016-05-26 | ||
| US62/341,720 | 2016-05-26 | ||
| US62/341,714 | 2016-05-26 | ||
| US62/341,804 | 2016-05-26 | ||
| PCT/US2017/033903 WO2017205311A1 (en) | 2016-05-26 | 2017-05-23 | Robotic surgical assemblies |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN109219414A CN109219414A (zh) | 2019-01-15 |
| CN109219414B true CN109219414B (zh) | 2021-11-19 |
Family
ID=60411530
Family Applications (7)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201780030972.7A Active CN109219414B (zh) | 2016-05-26 | 2017-05-23 | 机器人手术组合件 |
| CN201780028941.8A Active CN109152617B (zh) | 2016-05-26 | 2017-05-23 | 机器人手术组合件 |
| CN201780031985.6A Active CN109152609B (zh) | 2016-05-26 | 2017-05-23 | 机器人手术组合件 |
| CN201780002103.3A Active CN107735041B (zh) | 2016-05-26 | 2017-05-23 | 机器人手术组合件 |
| CN201780028940.3A Active CN109152611B (zh) | 2016-05-26 | 2017-05-23 | 机器人手术组合件 |
| CN201780028942.2A Active CN109195540B (zh) | 2016-05-26 | 2017-05-23 | 机器人手术组合件 |
| CN201780028873.5A Active CN109152608B (zh) | 2016-05-26 | 2017-05-23 | 机器人手术组合件 |
Family Applications After (6)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201780028941.8A Active CN109152617B (zh) | 2016-05-26 | 2017-05-23 | 机器人手术组合件 |
| CN201780031985.6A Active CN109152609B (zh) | 2016-05-26 | 2017-05-23 | 机器人手术组合件 |
| CN201780002103.3A Active CN107735041B (zh) | 2016-05-26 | 2017-05-23 | 机器人手术组合件 |
| CN201780028940.3A Active CN109152611B (zh) | 2016-05-26 | 2017-05-23 | 机器人手术组合件 |
| CN201780028942.2A Active CN109195540B (zh) | 2016-05-26 | 2017-05-23 | 机器人手术组合件 |
| CN201780028873.5A Active CN109152608B (zh) | 2016-05-26 | 2017-05-23 | 机器人手术组合件 |
Country Status (7)
| Country | Link |
|---|---|
| US (7) | US11547508B2 (zh) |
| EP (7) | EP3463143A4 (zh) |
| JP (8) | JP7037505B2 (zh) |
| CN (7) | CN109219414B (zh) |
| AU (9) | AU2017269271B2 (zh) |
| CA (7) | CA3022071A1 (zh) |
| WO (7) | WO2017205311A1 (zh) |
Families Citing this family (195)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11871901B2 (en) | 2012-05-20 | 2024-01-16 | Cilag Gmbh International | Method for situational awareness for surgical network or surgical network connected device capable of adjusting function based on a sensed situation or usage |
| US20140005640A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Surgical end effector jaw and electrode configurations |
| US11504192B2 (en) | 2014-10-30 | 2022-11-22 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11272992B2 (en) | 2016-06-03 | 2022-03-15 | Covidien Lp | Robotic surgical assemblies and instrument drive units thereof |
| US10695060B2 (en) | 2017-09-01 | 2020-06-30 | RevMedica, Inc. | Loadable power pack for surgical instruments |
| US11331099B2 (en) | 2017-09-01 | 2022-05-17 | Rev Medica, Inc. | Surgical stapler with removable power pack and interchangeable battery pack |
| US10966720B2 (en) | 2017-09-01 | 2021-04-06 | RevMedica, Inc. | Surgical stapler with removable power pack |
| US20210197400A1 (en) * | 2017-10-19 | 2021-07-01 | Kinova Inc. | Instrument drive mechanism for robotics |
| US11026687B2 (en) | 2017-10-30 | 2021-06-08 | Cilag Gmbh International | Clip applier comprising clip advancing systems |
| US11311342B2 (en) | 2017-10-30 | 2022-04-26 | Cilag Gmbh International | Method for communicating with surgical instrument systems |
| US11317919B2 (en) | 2017-10-30 | 2022-05-03 | Cilag Gmbh International | Clip applier comprising a clip crimping system |
| US11291510B2 (en) | 2017-10-30 | 2022-04-05 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11911045B2 (en) | 2017-10-30 | 2024-02-27 | Cllag GmbH International | Method for operating a powered articulating multi-clip applier |
| US11229436B2 (en) | 2017-10-30 | 2022-01-25 | Cilag Gmbh International | Surgical system comprising a surgical tool and a surgical hub |
| US11510741B2 (en) | 2017-10-30 | 2022-11-29 | Cilag Gmbh International | Method for producing a surgical instrument comprising a smart electrical system |
| US11564756B2 (en) | 2017-10-30 | 2023-01-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11801098B2 (en) | 2017-10-30 | 2023-10-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US10959744B2 (en) | 2017-10-30 | 2021-03-30 | Ethicon Llc | Surgical dissectors and manufacturing techniques |
| US11160606B2 (en) * | 2017-10-31 | 2021-11-02 | Covidien Lp | Systems and methods for lung treatments and post-treatment sealing of lungs |
| EP3716881A4 (en) | 2017-11-30 | 2021-08-18 | Covidien LP | ROBOTIC SURGICAL INSTRUMENT WITH INSTRUMENT ROTATION BASED ON A TRANSLATION POSITION |
| US11045270B2 (en) * | 2017-12-19 | 2021-06-29 | Cilag Gmbh International | Robotic attachment comprising exterior drive actuator |
| US10932872B2 (en) | 2017-12-28 | 2021-03-02 | Ethicon Llc | Cloud-based medical analytics for linking of local usage trends with the resource acquisition behaviors of larger data set |
| US11096693B2 (en) | 2017-12-28 | 2021-08-24 | Cilag Gmbh International | Adjustment of staple height of at least one row of staples based on the sensed tissue thickness or force in closing |
| US11818052B2 (en) | 2017-12-28 | 2023-11-14 | Cilag Gmbh International | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| US11202570B2 (en) | 2017-12-28 | 2021-12-21 | Cilag Gmbh International | Communication hub and storage device for storing parameters and status of a surgical device to be shared with cloud based analytics systems |
| US11069012B2 (en) | 2017-12-28 | 2021-07-20 | Cilag Gmbh International | Interactive surgical systems with condition handling of devices and data capabilities |
| US11317937B2 (en) | 2018-03-08 | 2022-05-03 | Cilag Gmbh International | Determining the state of an ultrasonic end effector |
| US11076921B2 (en) | 2017-12-28 | 2021-08-03 | Cilag Gmbh International | Adaptive control program updates for surgical hubs |
| US11559307B2 (en) | 2017-12-28 | 2023-01-24 | Cilag Gmbh International | Method of robotic hub communication, detection, and control |
| US11419667B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Ultrasonic energy device which varies pressure applied by clamp arm to provide threshold control pressure at a cut progression location |
| US11864728B2 (en) | 2017-12-28 | 2024-01-09 | Cilag Gmbh International | Characterization of tissue irregularities through the use of mono-chromatic light refractivity |
| US11364075B2 (en) | 2017-12-28 | 2022-06-21 | Cilag Gmbh International | Radio frequency energy device for delivering combined electrical signals |
| US10695081B2 (en) | 2017-12-28 | 2020-06-30 | Ethicon Llc | Controlling a surgical instrument according to sensed closure parameters |
| US11291495B2 (en) | 2017-12-28 | 2022-04-05 | Cilag Gmbh International | Interruption of energy due to inadvertent capacitive coupling |
| US12096916B2 (en) | 2017-12-28 | 2024-09-24 | Cilag Gmbh International | Method of sensing particulate from smoke evacuated from a patient, adjusting the pump speed based on the sensed information, and communicating the functional parameters of the system to the hub |
| US11432885B2 (en) | 2017-12-28 | 2022-09-06 | Cilag Gmbh International | Sensing arrangements for robot-assisted surgical platforms |
| US11424027B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Method for operating surgical instrument systems |
| US11147607B2 (en) | 2017-12-28 | 2021-10-19 | Cilag Gmbh International | Bipolar combination device that automatically adjusts pressure based on energy modality |
| US20190201146A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Safety systems for smart powered surgical stapling |
| US11446052B2 (en) | 2017-12-28 | 2022-09-20 | Cilag Gmbh International | Variation of radio frequency and ultrasonic power level in cooperation with varying clamp arm pressure to achieve predefined heat flux or power applied to tissue |
| US20190201139A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Communication arrangements for robot-assisted surgical platforms |
| US11659023B2 (en) | 2017-12-28 | 2023-05-23 | Cilag Gmbh International | Method of hub communication |
| US10898622B2 (en) | 2017-12-28 | 2021-01-26 | Ethicon Llc | Surgical evacuation system with a communication circuit for communication between a filter and a smoke evacuation device |
| US11179208B2 (en) | 2017-12-28 | 2021-11-23 | Cilag Gmbh International | Cloud-based medical analytics for security and authentication trends and reactive measures |
| US11571234B2 (en) | 2017-12-28 | 2023-02-07 | Cilag Gmbh International | Temperature control of ultrasonic end effector and control system therefor |
| US11266468B2 (en) | 2017-12-28 | 2022-03-08 | Cilag Gmbh International | Cooperative utilization of data derived from secondary sources by intelligent surgical hubs |
| US11304763B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Image capturing of the areas outside the abdomen to improve placement and control of a surgical device in use |
| US10892995B2 (en) | 2017-12-28 | 2021-01-12 | Ethicon Llc | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| US11376002B2 (en) | 2017-12-28 | 2022-07-05 | Cilag Gmbh International | Surgical instrument cartridge sensor assemblies |
| US10758310B2 (en) | 2017-12-28 | 2020-09-01 | Ethicon Llc | Wireless pairing of a surgical device with another device within a sterile surgical field based on the usage and situational awareness of devices |
| US11559308B2 (en) | 2017-12-28 | 2023-01-24 | Cilag Gmbh International | Method for smart energy device infrastructure |
| US11273001B2 (en) | 2017-12-28 | 2022-03-15 | Cilag Gmbh International | Surgical hub and modular device response adjustment based on situational awareness |
| US11969216B2 (en) | 2017-12-28 | 2024-04-30 | Cilag Gmbh International | Surgical network recommendations from real time analysis of procedure variables against a baseline highlighting differences from the optimal solution |
| US11132462B2 (en) | 2017-12-28 | 2021-09-28 | Cilag Gmbh International | Data stripping method to interrogate patient records and create anonymized record |
| US10987178B2 (en) | 2017-12-28 | 2021-04-27 | Ethicon Llc | Surgical hub control arrangements |
| US11284936B2 (en) | 2017-12-28 | 2022-03-29 | Cilag Gmbh International | Surgical instrument having a flexible electrode |
| US12062442B2 (en) | 2017-12-28 | 2024-08-13 | Cilag Gmbh International | Method for operating surgical instrument systems |
| US11056244B2 (en) | 2017-12-28 | 2021-07-06 | Cilag Gmbh International | Automated data scaling, alignment, and organizing based on predefined parameters within surgical networks |
| US11419630B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Surgical system distributed processing |
| US11464535B2 (en) | 2017-12-28 | 2022-10-11 | Cilag Gmbh International | Detection of end effector emersion in liquid |
| US11304745B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Surgical evacuation sensing and display |
| US11857152B2 (en) | 2017-12-28 | 2024-01-02 | Cilag Gmbh International | Surgical hub spatial awareness to determine devices in operating theater |
| US11253315B2 (en) | 2017-12-28 | 2022-02-22 | Cilag Gmbh International | Increasing radio frequency to create pad-less monopolar loop |
| US11311306B2 (en) | 2017-12-28 | 2022-04-26 | Cilag Gmbh International | Surgical systems for detecting end effector tissue distribution irregularities |
| US11576677B2 (en) | 2017-12-28 | 2023-02-14 | Cilag Gmbh International | Method of hub communication, processing, display, and cloud analytics |
| US11278281B2 (en) | 2017-12-28 | 2022-03-22 | Cilag Gmbh International | Interactive surgical system |
| US11324557B2 (en) | 2017-12-28 | 2022-05-10 | Cilag Gmbh International | Surgical instrument with a sensing array |
| US11529187B2 (en) | 2017-12-28 | 2022-12-20 | Cilag Gmbh International | Surgical evacuation sensor arrangements |
| US11304720B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Activation of energy devices |
| US11257589B2 (en) | 2017-12-28 | 2022-02-22 | Cilag Gmbh International | Real-time analysis of comprehensive cost of all instrumentation used in surgery utilizing data fluidity to track instruments through stocking and in-house processes |
| US11786245B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Surgical systems with prioritized data transmission capabilities |
| US11969142B2 (en) | 2017-12-28 | 2024-04-30 | Cilag Gmbh International | Method of compressing tissue within a stapling device and simultaneously displaying the location of the tissue within the jaws |
| US11051876B2 (en) | 2017-12-28 | 2021-07-06 | Cilag Gmbh International | Surgical evacuation flow paths |
| US11389164B2 (en) | 2017-12-28 | 2022-07-19 | Cilag Gmbh International | Method of using reinforced flexible circuits with multiple sensors to optimize performance of radio frequency devices |
| US11678881B2 (en) | 2017-12-28 | 2023-06-20 | Cilag Gmbh International | Spatial awareness of surgical hubs in operating rooms |
| US11589888B2 (en) | 2017-12-28 | 2023-02-28 | Cilag Gmbh International | Method for controlling smart energy devices |
| US11166772B2 (en) | 2017-12-28 | 2021-11-09 | Cilag Gmbh International | Surgical hub coordination of control and communication of operating room devices |
| US11234756B2 (en) | 2017-12-28 | 2022-02-01 | Cilag Gmbh International | Powered surgical tool with predefined adjustable control algorithm for controlling end effector parameter |
| US11602393B2 (en) | 2017-12-28 | 2023-03-14 | Cilag Gmbh International | Surgical evacuation sensing and generator control |
| US11423007B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Adjustment of device control programs based on stratified contextual data in addition to the data |
| US20190206569A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Method of cloud based data analytics for use with the hub |
| US11160605B2 (en) | 2017-12-28 | 2021-11-02 | Cilag Gmbh International | Surgical evacuation sensing and motor control |
| US11308075B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Surgical network, instrument, and cloud responses based on validation of received dataset and authentication of its source and integrity |
| US11832899B2 (en) | 2017-12-28 | 2023-12-05 | Cilag Gmbh International | Surgical systems with autonomously adjustable control programs |
| US10943454B2 (en) | 2017-12-28 | 2021-03-09 | Ethicon Llc | Detection and escalation of security responses of surgical instruments to increasing severity threats |
| US10849697B2 (en) | 2017-12-28 | 2020-12-01 | Ethicon Llc | Cloud interface for coupled surgical devices |
| US11998193B2 (en) | 2017-12-28 | 2024-06-04 | Cilag Gmbh International | Method for usage of the shroud as an aspect of sensing or controlling a powered surgical device, and a control algorithm to adjust its default operation |
| US20190201039A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Situational awareness of electrosurgical systems |
| US11744604B2 (en) | 2017-12-28 | 2023-09-05 | Cilag Gmbh International | Surgical instrument with a hardware-only control circuit |
| US10755813B2 (en) | 2017-12-28 | 2020-08-25 | Ethicon Llc | Communication of smoke evacuation system parameters to hub or cloud in smoke evacuation module for interactive surgical platform |
| US11633237B2 (en) | 2017-12-28 | 2023-04-25 | Cilag Gmbh International | Usage and technique analysis of surgeon / staff performance against a baseline to optimize device utilization and performance for both current and future procedures |
| US11903601B2 (en) | 2017-12-28 | 2024-02-20 | Cilag Gmbh International | Surgical instrument comprising a plurality of drive systems |
| US11786251B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Method for adaptive control schemes for surgical network control and interaction |
| US11464559B2 (en) | 2017-12-28 | 2022-10-11 | Cilag Gmbh International | Estimating state of ultrasonic end effector and control system therefor |
| US10966791B2 (en) | 2017-12-28 | 2021-04-06 | Ethicon Llc | Cloud-based medical analytics for medical facility segmented individualization of instrument function |
| US11672605B2 (en) | 2017-12-28 | 2023-06-13 | Cilag Gmbh International | Sterile field interactive control displays |
| US11058498B2 (en) | 2017-12-28 | 2021-07-13 | Cilag Gmbh International | Cooperative surgical actions for robot-assisted surgical platforms |
| US11100631B2 (en) | 2017-12-28 | 2021-08-24 | Cilag Gmbh International | Use of laser light and red-green-blue coloration to determine properties of back scattered light |
| US11844579B2 (en) | 2017-12-28 | 2023-12-19 | Cilag Gmbh International | Adjustments based on airborne particle properties |
| US10944728B2 (en) | 2017-12-28 | 2021-03-09 | Ethicon Llc | Interactive surgical systems with encrypted communication capabilities |
| US11896322B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Sensing the patient position and contact utilizing the mono-polar return pad electrode to provide situational awareness to the hub |
| US11540855B2 (en) | 2017-12-28 | 2023-01-03 | Cilag Gmbh International | Controlling activation of an ultrasonic surgical instrument according to the presence of tissue |
| US11612408B2 (en) | 2017-12-28 | 2023-03-28 | Cilag Gmbh International | Determining tissue composition via an ultrasonic system |
| US11896443B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Control of a surgical system through a surgical barrier |
| US11109866B2 (en) | 2017-12-28 | 2021-09-07 | Cilag Gmbh International | Method for circular stapler control algorithm adjustment based on situational awareness |
| US11410259B2 (en) | 2017-12-28 | 2022-08-09 | Cilag Gmbh International | Adaptive control program updates for surgical devices |
| US11304699B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Method for adaptive control schemes for surgical network control and interaction |
| US10892899B2 (en) | 2017-12-28 | 2021-01-12 | Ethicon Llc | Self describing data packets generated at an issuing instrument |
| US11832840B2 (en) | 2017-12-28 | 2023-12-05 | Cilag Gmbh International | Surgical instrument having a flexible circuit |
| US11666331B2 (en) | 2017-12-28 | 2023-06-06 | Cilag Gmbh International | Systems for detecting proximity of surgical end effector to cancerous tissue |
| US11937769B2 (en) | 2017-12-28 | 2024-03-26 | Cilag Gmbh International | Method of hub communication, processing, storage and display |
| EP4115840A1 (en) * | 2018-01-09 | 2023-01-11 | Covidien LP | Sterile interface module for robotic surgical assemblies |
| US20200359877A1 (en) * | 2018-01-10 | 2020-11-19 | Covidien Lp | Robotic surgical assemblies and adapter assemblies thereof |
| CA3027530A1 (en) * | 2018-02-02 | 2019-08-02 | Covidien Lp | Robotic surgical assemblies and adapter assemblies thereof |
| US11337746B2 (en) | 2018-03-08 | 2022-05-24 | Cilag Gmbh International | Smart blade and power pulsing |
| US11399858B2 (en) | 2018-03-08 | 2022-08-02 | Cilag Gmbh International | Application of smart blade technology |
| US11259830B2 (en) | 2018-03-08 | 2022-03-01 | Cilag Gmbh International | Methods for controlling temperature in ultrasonic device |
| JP2021514220A (ja) * | 2018-03-08 | 2021-06-10 | コヴィディエン リミテッド パートナーシップ | 手術ロボットシステム |
| US11197668B2 (en) | 2018-03-28 | 2021-12-14 | Cilag Gmbh International | Surgical stapling assembly comprising a lockout and an exterior access orifice to permit artificial unlocking of the lockout |
| US11471156B2 (en) | 2018-03-28 | 2022-10-18 | Cilag Gmbh International | Surgical stapling devices with improved rotary driven closure systems |
| US11090047B2 (en) | 2018-03-28 | 2021-08-17 | Cilag Gmbh International | Surgical instrument comprising an adaptive control system |
| US11278280B2 (en) | 2018-03-28 | 2022-03-22 | Cilag Gmbh International | Surgical instrument comprising a jaw closure lockout |
| US11219453B2 (en) | 2018-03-28 | 2022-01-11 | Cilag Gmbh International | Surgical stapling devices with cartridge compatible closure and firing lockout arrangements |
| US11207067B2 (en) | 2018-03-28 | 2021-12-28 | Cilag Gmbh International | Surgical stapling device with separate rotary driven closure and firing systems and firing member that engages both jaws while firing |
| US10973520B2 (en) | 2018-03-28 | 2021-04-13 | Ethicon Llc | Surgical staple cartridge with firing member driven camming assembly that has an onboard tissue cutting feature |
| US11096688B2 (en) | 2018-03-28 | 2021-08-24 | Cilag Gmbh International | Rotary driven firing members with different anvil and channel engagement features |
| US11259806B2 (en) | 2018-03-28 | 2022-03-01 | Cilag Gmbh International | Surgical stapling devices with features for blocking advancement of a camming assembly of an incompatible cartridge installed therein |
| WO2019191420A1 (en) * | 2018-03-29 | 2019-10-03 | Intuitive Surgical Operations, Inc. | Surgical instrument actuation mechanisms |
| CN112135578A (zh) * | 2018-03-29 | 2020-12-25 | 直观外科手术操作公司 | 手术器械致动系统 |
| CN112105311A (zh) * | 2018-04-06 | 2020-12-18 | 项目莫里股份有限公司 | 用于导管和其它用途的改进的流体驱动器、装置、方法和系统 |
| US20210114236A1 (en) * | 2018-04-16 | 2021-04-22 | Covidien Lp | Surgical robotic systems |
| CN110384556B (zh) * | 2018-04-20 | 2021-04-02 | 赛诺微医疗科技(浙江)有限公司 | 快换机构、采用其的器械夹持手及外科手术机器人 |
| CN110384557B (zh) * | 2018-04-20 | 2021-03-30 | 赛诺微医疗科技(浙江)有限公司 | 组合定位机构、采用其的器械夹持手及外科手术机器人 |
| CN110623747B (zh) * | 2018-06-22 | 2021-07-09 | 深圳市精锋医疗科技有限公司 | 连接机构、动力机构、操作臂及从操作设备 |
| US20210169593A1 (en) * | 2018-07-03 | 2021-06-10 | Covidien Lp | Surgical robotic systems |
| CN109009457A (zh) * | 2018-07-13 | 2018-12-18 | 深圳市精锋医疗科技有限公司 | 从操作设备 |
| CN109009458A (zh) * | 2018-07-13 | 2018-12-18 | 深圳市精锋医疗科技有限公司 | 操作臂 |
| US10881280B2 (en) * | 2018-08-24 | 2021-01-05 | Auris Health, Inc. | Manually and robotically controllable medical instruments |
| JP6745306B2 (ja) * | 2018-08-28 | 2020-08-26 | 株式会社メディカロイド | アダプタおよび接続方法 |
| JP6772226B2 (ja) * | 2018-08-28 | 2020-10-21 | 株式会社メディカロイド | 手術器具 |
| US11998288B2 (en) | 2018-09-17 | 2024-06-04 | Covidien Lp | Surgical robotic systems |
| EP3897440A4 (en) * | 2018-12-17 | 2022-12-28 | Covidien LP | ROBOTIC SURGICAL SYSTEMS WITH ROBOT ARM ASSEMBLIES |
| WO2020167906A1 (en) * | 2019-02-15 | 2020-08-20 | Covidien Lp | Surgical robotic systems |
| US11357503B2 (en) | 2019-02-19 | 2022-06-14 | Cilag Gmbh International | Staple cartridge retainers with frangible retention features and methods of using same |
| US11369377B2 (en) | 2019-02-19 | 2022-06-28 | Cilag Gmbh International | Surgical stapling assembly with cartridge based retainer configured to unlock a firing lockout |
| US11298129B2 (en) | 2019-02-19 | 2022-04-12 | Cilag Gmbh International | Method for providing an authentication lockout in a surgical stapler with a replaceable cartridge |
| US11751872B2 (en) | 2019-02-19 | 2023-09-12 | Cilag Gmbh International | Insertable deactivator element for surgical stapler lockouts |
| US11317915B2 (en) | 2019-02-19 | 2022-05-03 | Cilag Gmbh International | Universal cartridge based key feature that unlocks multiple lockout arrangements in different surgical staplers |
| IT201900002461A1 (it) * | 2019-02-20 | 2020-08-20 | Univ Degli Studi Di Verona | Interfaccia di collegamento per accoppiare un dispositivo chirurgico con un braccio mobile di un robot |
| EP3932623A4 (en) * | 2019-02-27 | 2023-03-08 | Korea University Research and Business Foundation | POWER TRANSMISSION SYSTEM FOR DRIVING A ROBOT JOINT |
| EP3716494A1 (en) * | 2019-03-26 | 2020-09-30 | Koninklijke Philips N.V. | Connector providing a connection through a flexible barrier |
| JP6831415B2 (ja) * | 2019-03-28 | 2021-02-17 | 株式会社メディカロイド | アダプタ |
| USD952144S1 (en) | 2019-06-25 | 2022-05-17 | Cilag Gmbh International | Surgical staple cartridge retainer with firing system authentication key |
| USD950728S1 (en) | 2019-06-25 | 2022-05-03 | Cilag Gmbh International | Surgical staple cartridge |
| USD964564S1 (en) | 2019-06-25 | 2022-09-20 | Cilag Gmbh International | Surgical staple cartridge retainer with a closure system authentication key |
| US11413102B2 (en) | 2019-06-27 | 2022-08-16 | Cilag Gmbh International | Multi-access port for surgical robotic systems |
| US11607278B2 (en) | 2019-06-27 | 2023-03-21 | Cilag Gmbh International | Cooperative robotic surgical systems |
| US11399906B2 (en) | 2019-06-27 | 2022-08-02 | Cilag Gmbh International | Robotic surgical system for controlling close operation of end-effectors |
| US11723729B2 (en) | 2019-06-27 | 2023-08-15 | Cilag Gmbh International | Robotic surgical assembly coupling safety mechanisms |
| US11547468B2 (en) | 2019-06-27 | 2023-01-10 | Cilag Gmbh International | Robotic surgical system with safety and cooperative sensing control |
| US11376082B2 (en) | 2019-06-27 | 2022-07-05 | Cilag Gmbh International | Robotic surgical system with local sensing of functional parameters based on measurements of multiple physical inputs |
| US11369443B2 (en) | 2019-06-27 | 2022-06-28 | Cilag Gmbh International | Method of using a surgical modular robotic assembly |
| US11612445B2 (en) | 2019-06-27 | 2023-03-28 | Cilag Gmbh International | Cooperative operation of robotic arms |
| US11376083B2 (en) | 2019-06-27 | 2022-07-05 | Cilag Gmbh International | Determining robotic surgical assembly coupling status |
| EP3998980A4 (en) * | 2019-07-17 | 2023-08-09 | Asensus Surgical US, Inc. | COMPACT ACTUATION CONFIGURATION AND EXPANDABLE INSTRUMENT RECEIVER FOR ROBOTICALLY CONTROLLED SURGICAL INSTRUMENTS |
| EP3998960A4 (en) | 2019-07-19 | 2022-12-14 | Revmedica, Inc. | SURGICAL STAPLER WITH REMOVABLE POWER SUPPLY |
| CN114269280A (zh) * | 2019-08-28 | 2022-04-01 | 柯惠Lp公司 | 用于机器人手术组合件的无菌接口模块 |
| CN112957128B (zh) * | 2019-08-30 | 2022-07-01 | 上海微创医疗机器人(集团)股份有限公司 | 传动、驱动、无菌、器械盒组件与手术器械系统、机器人 |
| GB2586998B (en) | 2019-09-11 | 2022-07-13 | Prec Robotics Limited | A driver module |
| JP7046880B2 (ja) | 2019-09-27 | 2022-04-04 | 株式会社メディカロイド | 手術器具 |
| CN110653574A (zh) * | 2019-10-22 | 2020-01-07 | 苏州飞宇精密科技股份有限公司 | 一种铝镁合金电池箱及其加工成型方法 |
| CN111700683A (zh) * | 2019-11-20 | 2020-09-25 | 山东威高手术机器人有限公司 | 微创手术器械快换装置 |
| CN111012425B (zh) * | 2019-12-30 | 2021-04-20 | 盈甲医疗科技(北京)有限公司 | 用于电动吻合器的电动弯转保险装置及其电动吻合器 |
| WO2021158353A1 (en) * | 2020-02-05 | 2021-08-12 | Covidien Lp | Robotic surgical assemblies |
| IT202000002536A1 (it) | 2020-02-10 | 2021-08-10 | Medical Microinstruments Spa | Adattatore sterile per un sistema di chirurgia robotica, assieme, sistema e metodo |
| CN114828769B (zh) * | 2020-02-18 | 2024-01-09 | 瑞德医疗机器股份有限公司 | 医疗用机器人 |
| CN111329594B (zh) * | 2020-02-20 | 2022-04-19 | 深圳迈瑞生物医疗电子股份有限公司 | 一种机械臂和医疗设备 |
| US20210259693A1 (en) * | 2020-02-26 | 2021-08-26 | Covidien Lp | Surgical stapling device with flexible shaft |
| US11806048B2 (en) * | 2020-03-10 | 2023-11-07 | Covidien Lp | Robotically and manually operable uterine manipulators |
| US20210282836A1 (en) | 2020-03-11 | 2021-09-16 | Covidien Lp | Robotic colpotomy systems |
| WO2021199413A1 (ja) * | 2020-04-02 | 2021-10-07 | リバーフィールド株式会社 | ベアリング構造、及び、ベアリング構造を備えたドレープユニット |
| US11806098B2 (en) | 2020-04-08 | 2023-11-07 | DePuy Synthes Products, Inc. | Surgical robotic systems including a sterile connector and related methods |
| CN113520611B (zh) * | 2020-04-13 | 2023-08-25 | 上海微创医疗机器人(集团)股份有限公司 | 无菌隔离机构、持镜臂及持镜机器人 |
| US12030195B2 (en) * | 2020-05-27 | 2024-07-09 | Covidien Lp | Tensioning mechanisms and methods for articulating surgical instruments such as for use in robotic surgical systems |
| CA3183162A1 (en) | 2020-06-19 | 2021-12-23 | Jake Anthony Sganga | Systems and methods for guidance of intraluminal devices within the vasculature |
| JP7434614B2 (ja) * | 2020-06-30 | 2024-02-20 | 普鋭醫療(香港)有限公司 | 着脱可能なヘッドとハンドルを備えた可撓性内視鏡 |
| US11974829B2 (en) | 2021-06-30 | 2024-05-07 | Cilag Gmbh International | Link-driven articulation device for a surgical device |
| US11931026B2 (en) | 2021-06-30 | 2024-03-19 | Cilag Gmbh International | Staple cartridge replacement |
| CA3222522A1 (en) | 2021-07-01 | 2023-01-05 | David James Bell | Vision-based position and orientation determination for endovascular tools |
| US11707332B2 (en) | 2021-07-01 | 2023-07-25 | Remedy Robotics, Inc. | Image space control for endovascular tools |
| CN114052919A (zh) * | 2021-11-18 | 2022-02-18 | 武汉联影智融医疗科技有限公司 | 动力连接装置、末端执行设备及腹腔镜机器人 |
| CN114347094A (zh) * | 2021-12-10 | 2022-04-15 | 重庆大学 | 机械臂末端自适应姿态误差补偿柔性夹持机构及方法 |
| CN115005993B (zh) * | 2022-05-31 | 2023-09-22 | 四川省肿瘤医院 | 一种弯曲机构及应用该机构的手术机械臂 |
| US20240225630A1 (en) | 2023-01-11 | 2024-07-11 | Covidien Lp | Surgical systems and instruments with enhanced cleanability |
| CN115990903B (zh) * | 2023-03-24 | 2023-10-27 | 山东交通学院 | 抓取机构 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011037394A3 (ko) * | 2009-09-23 | 2011-08-25 | 주식회사 이턴 | 멸균 어댑터, 휠의 체결 구조 및 수술용 인스트루먼트의 체결 구조 |
| US8998799B2 (en) * | 1996-12-12 | 2015-04-07 | Intuitive Surgical Operations, Inc. | Sterile surgical adaptor |
| CN104605936A (zh) * | 2012-04-27 | 2015-05-13 | 库卡实验仪器有限公司 | 机器人手术系统 |
| CN104783845A (zh) * | 2015-01-22 | 2015-07-22 | 天津手智医疗科技有限责任公司 | 微创手术智能化器械 |
| CN105476677A (zh) * | 2014-10-07 | 2016-04-13 | 柯惠Lp公司 | 手持式机电手术系统 |
Family Cites Families (619)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US899879A (en) | 1905-11-21 | 1908-09-29 | Tomasz Macherski | Composition for decoloring oils, fats, &c., and process of making the same. |
| US2777340A (en) | 1955-09-28 | 1957-01-15 | Leonard J Hettwer | Offset drilling attachment |
| US3025199A (en) | 1956-06-13 | 1962-03-13 | Kimberly Clark Co | Puffed cellulosic product and method of manufacture |
| US2957353A (en) | 1958-08-26 | 1960-10-25 | Teleflex Inc | Connector |
| US3111328A (en) | 1961-07-03 | 1963-11-19 | Rito Vincent L J Di | Multiuse adapter for manipulators |
| US3734515A (en) | 1971-01-29 | 1973-05-22 | Thor Power Tool Co | Power wrench with interchangeable adapters |
| US3695058A (en) | 1971-05-26 | 1972-10-03 | Marvin W Keith Jr | Flexible link rotatable drive coupling |
| US3759336A (en) | 1972-01-21 | 1973-09-18 | D Marcovitz | Interchangeable power operated tools |
| US4162399A (en) | 1977-09-16 | 1979-07-24 | Bei Electronics, Inc. | Optical encoder with fiber optics |
| US4606343A (en) | 1980-08-18 | 1986-08-19 | United States Surgical Corporation | Self-powered surgical fastening instrument |
| US4512709A (en) * | 1983-07-25 | 1985-04-23 | Cincinnati Milacron Inc. | Robot toolchanger system |
| US4705038A (en) | 1985-01-23 | 1987-11-10 | Dyonics, Inc. | Surgical system for powered instruments |
| US4722685A (en) | 1985-05-30 | 1988-02-02 | Estrada Juan M De | Tool for adapting a portable lathe to treat the back molar teeth of horses |
| US4683772A (en) | 1985-07-25 | 1987-08-04 | Westinghouse Electric Corp. | Hand gear train with three degrees of freedom |
| SE469823B (sv) | 1987-02-23 | 1993-09-27 | Univ Western Australia | Ledmekanism för robotarmar |
| US4823807A (en) | 1988-02-11 | 1989-04-25 | Board Of Regents, Univ. Of Texas System | Device for non-invasive diagnosis and monitoring of articular and periarticular pathology |
| US4874181A (en) | 1988-05-31 | 1989-10-17 | Hsu Shing Wang | Coupling member for securing a drilling head to the rotatable rod of a pneumatic tool body |
| US5301061A (en) | 1989-07-27 | 1994-04-05 | Olympus Optical Co., Ltd. | Endoscope system |
| US5152744A (en) | 1990-02-07 | 1992-10-06 | Smith & Nephew Dyonics | Surgical instrument |
| ATE105224T1 (de) | 1990-02-23 | 1994-05-15 | Stefan Kerpe | Antrieb mindestens zweier konzentrischer wellen zum bewegen einer robotor-abtriebseinrichtung. |
| JP3034019B2 (ja) | 1990-11-26 | 2000-04-17 | 旭光学工業株式会社 | 内視鏡の先端部 |
| US5129570A (en) | 1990-11-30 | 1992-07-14 | Ethicon, Inc. | Surgical stapler |
| US5413267A (en) | 1991-05-14 | 1995-05-09 | United States Surgical Corporation | Surgical stapler with spent cartridge sensing and lockout means |
| US5129118A (en) | 1991-07-29 | 1992-07-14 | Walmesley Mark W | Accessory tool apparatus for use on power drills |
| US5326013A (en) | 1991-10-18 | 1994-07-05 | United States Surgical Corporation | Self contained gas powered surgical apparatus |
| US5312023A (en) | 1991-10-18 | 1994-05-17 | United States Surgical Corporation | Self contained gas powered surgical apparatus |
| US5478003A (en) | 1991-10-18 | 1995-12-26 | United States Surgical Corporation | Surgical apparatus |
| US5197649A (en) | 1991-10-29 | 1993-03-30 | The Trustees Of Columbia University In The City Of New York | Gastrointestinal endoscoptic stapler |
| US5383874A (en) | 1991-11-08 | 1995-01-24 | Ep Technologies, Inc. | Systems for identifying catheters and monitoring their use |
| US5383880A (en) | 1992-01-17 | 1995-01-24 | Ethicon, Inc. | Endoscopic surgical system with sensing means |
| US5433721A (en) | 1992-01-17 | 1995-07-18 | Ethicon, Inc. | Endoscopic instrument having a torsionally stiff drive shaft for applying fasteners to tissue |
| US5350355A (en) | 1992-02-14 | 1994-09-27 | Automated Medical Instruments, Inc. | Automated surgical instrument |
| US5389098A (en) | 1992-05-19 | 1995-02-14 | Olympus Optical Co., Ltd. | Surgical device for stapling and/or fastening body tissues |
| US5658300A (en) | 1992-06-04 | 1997-08-19 | Olympus Optical Co., Ltd. | Tissue fixing surgical instrument, tissue-fixing device, and method of fixing tissues |
| US5762458A (en) | 1996-02-20 | 1998-06-09 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| US5609560A (en) | 1992-08-19 | 1997-03-11 | Olympus Optical Co., Ltd. | Medical operation device control system for controlling a operation devices accessed respectively by ID codes |
| US5601224A (en) | 1992-10-09 | 1997-02-11 | Ethicon, Inc. | Surgical instrument |
| US5626587A (en) | 1992-10-09 | 1997-05-06 | Ethicon Endo-Surgery, Inc. | Method for operating a surgical instrument |
| US5662662A (en) | 1992-10-09 | 1997-09-02 | Ethicon Endo-Surgery, Inc. | Surgical instrument and method |
| US5431323A (en) | 1992-10-09 | 1995-07-11 | Ethicon, Inc. | Endoscopic surgical instrument with pivotable and rotatable staple cartridge |
| US5400267A (en) | 1992-12-08 | 1995-03-21 | Hemostatix Corporation | Local in-device memory feature for electrically powered medical equipment |
| US5540706A (en) | 1993-01-25 | 1996-07-30 | Aust; Gilbert M. | Surgical instrument |
| US5540375A (en) | 1993-04-20 | 1996-07-30 | United States Surgical Corporation | Endoscopic stapler |
| US5467911A (en) | 1993-04-27 | 1995-11-21 | Olympus Optical Co., Ltd. | Surgical device for stapling and fastening body tissues |
| US6406472B1 (en) * | 1993-05-14 | 2002-06-18 | Sri International, Inc. | Remote center positioner |
| CA2124109A1 (en) | 1993-05-24 | 1994-11-25 | Mark T. Byrne | Endoscopic surgical instrument with electromagnetic sensor |
| US5542594A (en) | 1993-10-06 | 1996-08-06 | United States Surgical Corporation | Surgical stapling apparatus with biocompatible surgical fabric |
| US5487499A (en) | 1993-10-08 | 1996-01-30 | United States Surgical Corporation | Surgical apparatus for applying surgical fasteners including a counter |
| US5476379A (en) | 1993-11-04 | 1995-12-19 | Disel; Jimmy D. | Illumination system and connector assembly for a dental handpiece |
| WO1995018572A1 (en) | 1994-01-04 | 1995-07-13 | Alpha Surgical Technologies, Inc. | Stapling device |
| US6165169A (en) | 1994-03-04 | 2000-12-26 | Ep Technologies, Inc. | Systems and methods for identifying the physical, mechanical, and functional attributes of multiple electrode arrays |
| US5526822A (en) | 1994-03-24 | 1996-06-18 | Biopsys Medical, Inc. | Method and apparatus for automated biopsy and collection of soft tissue |
| US5529235A (en) | 1994-04-28 | 1996-06-25 | Ethicon Endo-Surgery, Inc. | Identification device for surgical instrument |
| US5553675A (en) | 1994-06-10 | 1996-09-10 | Minnesota Mining And Manufacturing Company | Orthopedic surgical device |
| EP0699418A1 (en) | 1994-08-05 | 1996-03-06 | United States Surgical Corporation | Self-contained powered surgical apparatus |
| US5779130A (en) | 1994-08-05 | 1998-07-14 | United States Surgical Corporation | Self-contained powered surgical apparatus |
| EP0705571A1 (en) | 1994-10-07 | 1996-04-10 | United States Surgical Corporation | Self-contained powered surgical apparatus |
| US5549637A (en) | 1994-11-10 | 1996-08-27 | Crainich; Lawrence | Articulated medical instrument |
| US5868760A (en) | 1994-12-07 | 1999-02-09 | Mcguckin, Jr.; James F. | Method and apparatus for endolumenally resectioning tissue |
| US5632432A (en) | 1994-12-19 | 1997-05-27 | Ethicon Endo-Surgery, Inc. | Surgical instrument |
| US5713505A (en) | 1996-05-13 | 1998-02-03 | Ethicon Endo-Surgery, Inc. | Articulation transmission mechanism for surgical instruments |
| US5704534A (en) | 1994-12-19 | 1998-01-06 | Ethicon Endo-Surgery, Inc. | Articulation assembly for surgical instruments |
| US6321855B1 (en) | 1994-12-29 | 2001-11-27 | George Edward Barnes | Anti-vibration adaptor |
| US5667353A (en) * | 1995-03-31 | 1997-09-16 | Inspex Inc. | Robot system |
| US5649956A (en) | 1995-06-07 | 1997-07-22 | Sri International | System and method for releasably holding a surgical instrument |
| CA2715441C (en) * | 1995-06-07 | 2013-01-08 | Sri International | Surgical manipulator for a telerobotic system |
| US5782396A (en) | 1995-08-28 | 1998-07-21 | United States Surgical Corporation | Surgical stapler |
| US6032849A (en) | 1995-08-28 | 2000-03-07 | United States Surgical | Surgical stapler |
| US5762256A (en) | 1995-08-28 | 1998-06-09 | United States Surgical Corporation | Surgical stapler |
| US5784542A (en) | 1995-09-07 | 1998-07-21 | California Institute Of Technology | Decoupled six degree-of-freedom teleoperated robot system |
| BR9607702A (pt) | 1995-09-15 | 1998-01-13 | Robert Lee Thompson | Dispositivo cirurgico/diagnóstico de imagem |
| US7141049B2 (en) | 1999-03-09 | 2006-11-28 | Thermage, Inc. | Handpiece for treatment of tissue |
| US5855583A (en) | 1996-02-20 | 1999-01-05 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| US6699177B1 (en) | 1996-02-20 | 2004-03-02 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive surgical procedures |
| US5820009A (en) | 1996-02-20 | 1998-10-13 | Richard-Allan Medical Industries, Inc. | Articulated surgical instrument with improved jaw closure mechanism |
| US6010054A (en) | 1996-02-20 | 2000-01-04 | Imagyn Medical Technologies | Linear stapling instrument with improved staple cartridge |
| US5792135A (en) | 1996-05-20 | 1998-08-11 | Intuitive Surgical, Inc. | Articulated surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| US5797900A (en) | 1996-05-20 | 1998-08-25 | Intuitive Surgical, Inc. | Wrist mechanism for surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| US6119913A (en) | 1996-06-14 | 2000-09-19 | Boston Scientific Corporation | Endoscopic stapler |
| US6017354A (en) | 1996-08-15 | 2000-01-25 | Stryker Corporation | Integrated system for powered surgical tools |
| US6364888B1 (en) | 1996-09-09 | 2002-04-02 | Intuitive Surgical, Inc. | Alignment of master and slave in a minimally invasive surgical apparatus |
| US8182469B2 (en) | 1997-11-21 | 2012-05-22 | Intuitive Surgical Operations, Inc. | Surgical accessory clamp and method |
| US6132368A (en) | 1996-12-12 | 2000-10-17 | Intuitive Surgical, Inc. | Multi-component telepresence system and method |
| US7727244B2 (en) | 1997-11-21 | 2010-06-01 | Intuitive Surgical Operation, Inc. | Sterile surgical drape |
| US6331181B1 (en) * | 1998-12-08 | 2001-12-18 | Intuitive Surgical, Inc. | Surgical robotic tools, data architecture, and use |
| US7699855B2 (en) | 1996-12-12 | 2010-04-20 | Intuitive Surgical Operations, Inc. | Sterile surgical adaptor |
| US8206406B2 (en) * | 1996-12-12 | 2012-06-26 | Intuitive Surgical Operations, Inc. | Disposable sterile surgical adaptor |
| US8529582B2 (en) | 1996-12-12 | 2013-09-10 | Intuitive Surgical Operations, Inc. | Instrument interface of a robotic surgical system |
| US6129547A (en) | 1997-05-06 | 2000-10-10 | Ballard Medical Products | Oral care system |
| AU8903898A (en) | 1997-08-11 | 1999-03-01 | Paul W. Mayer | Motorized motion-canceling suture tool holder |
| US6434507B1 (en) | 1997-09-05 | 2002-08-13 | Surgical Navigation Technologies, Inc. | Medical instrument and method for use with computer-assisted image guided surgery |
| US6714839B2 (en) | 1998-12-08 | 2004-03-30 | Intuitive Surgical, Inc. | Master having redundant degrees of freedom |
| US5865361A (en) | 1997-09-23 | 1999-02-02 | United States Surgical Corporation | Surgical stapling apparatus |
| US5842993A (en) * | 1997-12-10 | 1998-12-01 | The Whitaker Corporation | Navigable ultrasonic imaging probe assembly |
| US5863159A (en) | 1997-12-12 | 1999-01-26 | Lasko; Leonard J. | Drill angle attachment coupling |
| DE69922791T2 (de) | 1998-02-19 | 2005-12-08 | California Institute Of Technology, Pasadena | Gerät zur bereitstellung eines spherischen sehfeldes während endoskopischen eingriffen |
| US20080125794A1 (en) * | 1998-02-24 | 2008-05-29 | Hansen Medical, Inc. | Surgical instrument |
| US6554844B2 (en) | 1998-02-24 | 2003-04-29 | Endovia Medical, Inc. | Surgical instrument |
| US6239732B1 (en) | 1998-04-13 | 2001-05-29 | Dallas Semiconductor Corporation | One-wire device with A-to-D converter |
| US6126058A (en) | 1998-06-19 | 2000-10-03 | Scimed Life Systems, Inc. | Method and device for full thickness resectioning of an organ |
| AU5391999A (en) | 1998-08-04 | 2000-02-28 | Intuitive Surgical, Inc. | Manipulator positioning linkage for robotic surgery |
| US6256859B1 (en) | 1998-09-25 | 2001-07-10 | Sherwood Services Ag | Method of manufacturing an aspiring tool |
| US5993454A (en) | 1998-09-29 | 1999-11-30 | Stryker Corporation | Drill attachment for a surgical drill |
| US6659939B2 (en) | 1998-11-20 | 2003-12-09 | Intuitive Surgical, Inc. | Cooperative minimally invasive telesurgical system |
| US6951535B2 (en) | 2002-01-16 | 2005-10-04 | Intuitive Surgical, Inc. | Tele-medicine system that transmits an entire state of a subsystem |
| US6459926B1 (en) | 1998-11-20 | 2002-10-01 | Intuitive Surgical, Inc. | Repositioning and reorientation of master/slave relationship in minimally invasive telesurgery |
| US8600551B2 (en) | 1998-11-20 | 2013-12-03 | Intuitive Surgical Operations, Inc. | Medical robotic system with operatively couplable simulator unit for surgeon training |
| US7238021B1 (en) | 1998-12-03 | 2007-07-03 | Johnson Gary E | Powered cutting surface with protective guard for equine teeth |
| US6799065B1 (en) | 1998-12-08 | 2004-09-28 | Intuitive Surgical, Inc. | Image shifting apparatus and method for a telerobotic system |
| US6770081B1 (en) | 2000-01-07 | 2004-08-03 | Intuitive Surgical, Inc. | In vivo accessories for minimally invasive robotic surgery and methods |
| US6493608B1 (en) | 1999-04-07 | 2002-12-10 | Intuitive Surgical, Inc. | Aspects of a control system of a minimally invasive surgical apparatus |
| US7125403B2 (en) | 1998-12-08 | 2006-10-24 | Intuitive Surgical | In vivo accessories for minimally invasive robotic surgery |
| US6451027B1 (en) * | 1998-12-16 | 2002-09-17 | Intuitive Surgical, Inc. | Devices and methods for moving an image capture device in telesurgical systems |
| US6394998B1 (en) | 1999-01-22 | 2002-05-28 | Intuitive Surgical, Inc. | Surgical tools for use in minimally invasive telesurgical applications |
| US6594552B1 (en) | 1999-04-07 | 2003-07-15 | Intuitive Surgical, Inc. | Grip strength with tactile feedback for robotic surgery |
| US8944070B2 (en) | 1999-04-07 | 2015-02-03 | Intuitive Surgical Operations, Inc. | Non-force reflecting method for providing tool force information to a user of a telesurgical system |
| US6424885B1 (en) | 1999-04-07 | 2002-07-23 | Intuitive Surgical, Inc. | Camera referenced control in a minimally invasive surgical apparatus |
| US6565554B1 (en) | 1999-04-07 | 2003-05-20 | Intuitive Surgical, Inc. | Friction compensation in a minimally invasive surgical apparatus |
| US6860892B1 (en) | 1999-05-28 | 2005-03-01 | General Surgical Innovations, Inc. | Specially shaped balloon device for use in surgery and method of use |
| US8241322B2 (en) | 2005-07-27 | 2012-08-14 | Tyco Healthcare Group Lp | Surgical device |
| US7695485B2 (en) | 2001-11-30 | 2010-04-13 | Power Medical Interventions, Llc | Surgical device |
| US6793652B1 (en) | 1999-06-02 | 2004-09-21 | Power Medical Interventions, Inc. | Electro-mechanical surgical device |
| US6981941B2 (en) | 1999-06-02 | 2006-01-03 | Power Medical Interventions | Electro-mechanical surgical device |
| US6443973B1 (en) | 1999-06-02 | 2002-09-03 | Power Medical Interventions, Inc. | Electromechanical driver device for use with anastomosing, stapling, and resecting instruments |
| US8025199B2 (en) | 2004-02-23 | 2011-09-27 | Tyco Healthcare Group Lp | Surgical cutting and stapling device |
| US7032798B2 (en) | 1999-06-02 | 2006-04-25 | Power Medical Interventions, Inc. | Electro-mechanical surgical device |
| US7951071B2 (en) | 1999-06-02 | 2011-05-31 | Tyco Healthcare Group Lp | Moisture-detecting shaft for use with an electro-mechanical surgical device |
| US6491201B1 (en) | 2000-02-22 | 2002-12-10 | Power Medical Interventions, Inc. | Fluid delivery mechanism for use with anastomosing, stapling, and resecting instruments |
| US6716233B1 (en) | 1999-06-02 | 2004-04-06 | Power Medical Interventions, Inc. | Electromechanical driver and remote surgical instrument attachment having computer assisted control capabilities |
| US6264087B1 (en) | 1999-07-12 | 2001-07-24 | Powermed, Inc. | Expanding parallel jaw device for use with an electromechanical driver device |
| US6315184B1 (en) | 1999-06-02 | 2001-11-13 | Powermed, Inc. | Stapling device for use with an electromechanical driver device for use with anastomosing, stapling, and resecting instruments |
| US6451007B1 (en) | 1999-07-29 | 2002-09-17 | Dale E. Koop | Thermal quenching of tissue |
| US6611793B1 (en) | 1999-09-07 | 2003-08-26 | Scimed Life Systems, Inc. | Systems and methods to identify and disable re-use single use devices based on detecting environmental changes |
| US10188471B2 (en) | 1999-09-17 | 2019-01-29 | Intuitive Surgical Operations, Inc. | Tele-operative surgical systems and methods of control at joint limits using inverse kinematics |
| US7594912B2 (en) | 2004-09-30 | 2009-09-29 | Intuitive Surgical, Inc. | Offset remote center manipulator for robotic surgery |
| US9259280B2 (en) | 1999-09-17 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Phantom degrees of freedom in joint estimation and control |
| US8004229B2 (en) | 2005-05-19 | 2011-08-23 | Intuitive Surgical Operations, Inc. | Software center and highly configurable robotic systems for surgery and other uses |
| US8768516B2 (en) | 2009-06-30 | 2014-07-01 | Intuitive Surgical Operations, Inc. | Control of medical robotic system manipulator about kinematic singularities |
| US6368324B1 (en) | 1999-09-24 | 2002-04-09 | Medtronic Xomed, Inc. | Powered surgical handpiece assemblies and handpiece adapter assemblies |
| US6491691B1 (en) | 1999-10-08 | 2002-12-10 | Intuitive Surgical, Inc. | Minimally invasive surgical hook apparatus and method for using same |
| US6206903B1 (en) | 1999-10-08 | 2001-03-27 | Intuitive Surgical, Inc. | Surgical tool with mechanical advantage |
| US6312435B1 (en) | 1999-10-08 | 2001-11-06 | Intuitive Surgical, Inc. | Surgical instrument with extended reach for use in minimally invasive surgery |
| US6533157B1 (en) | 2000-02-22 | 2003-03-18 | Power Medical Interventions, Inc. | Tissue stapling attachment for use with an electromechanical driver device |
| US6488197B1 (en) | 2000-02-22 | 2002-12-03 | Power Medical Interventions, Inc. | Fluid delivery device for use with anastomosing resecting and stapling instruments |
| US6348061B1 (en) | 2000-02-22 | 2002-02-19 | Powermed, Inc. | Vessel and lumen expander attachment for use with an electromechanical driver device |
| US8016855B2 (en) | 2002-01-08 | 2011-09-13 | Tyco Healthcare Group Lp | Surgical device |
| US7770773B2 (en) | 2005-07-27 | 2010-08-10 | Power Medical Interventions, Llc | Surgical device |
| US6645196B1 (en) | 2000-06-16 | 2003-11-11 | Intuitive Surgical, Inc. | Guided tool change |
| JP3897962B2 (ja) | 2000-07-19 | 2007-03-28 | 株式会社モリタ製作所 | 識別型のインスツルメント体、識別型のアダプタ、識別型のチューブ、これらを用いた診療装置 |
| US6746443B1 (en) | 2000-07-27 | 2004-06-08 | Intuitive Surgical Inc. | Roll-pitch-roll surgical tool |
| US6902560B1 (en) | 2000-07-27 | 2005-06-07 | Intuitive Surgical, Inc. | Roll-pitch-roll surgical tool |
| AU2001288462A1 (en) | 2000-08-30 | 2002-03-13 | Cerebral Vascular Applications Inc. | Medical instrument |
| JP4014792B2 (ja) | 2000-09-29 | 2007-11-28 | 株式会社東芝 | マニピュレータ |
| US6817508B1 (en) | 2000-10-13 | 2004-11-16 | Tyco Healthcare Group, Lp | Surgical stapling device |
| US6716226B2 (en) | 2001-06-25 | 2004-04-06 | Inscope Development, Llc | Surgical clip |
| US20050004559A1 (en) | 2003-06-03 | 2005-01-06 | Senorx, Inc. | Universal medical device control console |
| US6840938B1 (en) | 2000-12-29 | 2005-01-11 | Intuitive Surgical, Inc. | Bipolar cauterizing instrument |
| US8313496B2 (en) | 2001-02-02 | 2012-11-20 | Lsi Solutions, Inc. | System for endoscopic suturing |
| US7699835B2 (en) | 2001-02-15 | 2010-04-20 | Hansen Medical, Inc. | Robotically controlled surgical instruments |
| US7905897B2 (en) | 2001-03-14 | 2011-03-15 | Tyco Healthcare Group Lp | Trocar device |
| US6783524B2 (en) | 2001-04-19 | 2004-08-31 | Intuitive Surgical, Inc. | Robotic surgical tool with ultrasound cauterizing and cutting instrument |
| US7824401B2 (en) | 2004-10-08 | 2010-11-02 | Intuitive Surgical Operations, Inc. | Robotic tool with wristed monopolar electrosurgical end effectors |
| US6994708B2 (en) * | 2001-04-19 | 2006-02-07 | Intuitive Surgical | Robotic tool with monopolar electro-surgical scissors |
| US8398634B2 (en) | 2002-04-18 | 2013-03-19 | Intuitive Surgical Operations, Inc. | Wristed robotic surgical tool for pluggable end-effectors |
| ATE551955T1 (de) | 2001-04-20 | 2012-04-15 | Tyco Healthcare | Chirurgische vorrichtung mit bipolaren oder ultraschalleigenschaften |
| US7607440B2 (en) | 2001-06-07 | 2009-10-27 | Intuitive Surgical, Inc. | Methods and apparatus for surgical planning |
| US20030009154A1 (en) | 2001-06-20 | 2003-01-09 | Whitman Michael P. | Method and system for integrated medical tracking |
| CA2451558C (en) | 2001-06-22 | 2013-08-06 | Power Medical Interventions, Inc. | Electro-mechanical surgical device with data memory unit |
| US6817974B2 (en) | 2001-06-29 | 2004-11-16 | Intuitive Surgical, Inc. | Surgical tool having positively positionable tendon-actuated multi-disk wrist joint |
| AU2002322374B2 (en) | 2001-06-29 | 2006-10-26 | Intuitive Surgical, Inc. | Platform link wrist mechanism |
| US7044911B2 (en) | 2001-06-29 | 2006-05-16 | Philometron, Inc. | Gateway platform for biological monitoring and delivery of therapeutic compounds |
| EP2308395A1 (en) | 2001-08-08 | 2011-04-13 | Stryker Corporation | Surgical tool system including a navigation unit that receives information about the implant the system is to implant and that responds to the received information |
| US6676684B1 (en) | 2001-09-04 | 2004-01-13 | Intuitive Surgical, Inc. | Roll-pitch-roll-yaw surgical tool |
| US6728599B2 (en) | 2001-09-07 | 2004-04-27 | Computer Motion, Inc. | Modularity system for computer assisted surgery |
| DE10147145C2 (de) | 2001-09-25 | 2003-12-18 | Kunz Reiner | Multifunktionsinstrument für die mikroinvasive Chirurgie |
| ES2514666T3 (es) | 2001-10-05 | 2014-10-28 | Covidien Lp | Dispositivo de grapado quirúrgico |
| US7464847B2 (en) | 2005-06-03 | 2008-12-16 | Tyco Healthcare Group Lp | Surgical stapler with timer and feedback display |
| US10285694B2 (en) | 2001-10-20 | 2019-05-14 | Covidien Lp | Surgical stapler with timer and feedback display |
| US6783533B2 (en) | 2001-11-21 | 2004-08-31 | Sythes Ag Chur | Attachable/detachable reaming head for surgical reamer |
| EP1453432B1 (en) | 2001-12-04 | 2012-08-01 | Tyco Healthcare Group LP | System and method for calibrating a surgical instrument |
| US6839612B2 (en) | 2001-12-07 | 2005-01-04 | Institute Surgical, Inc. | Microwrist system for surgical procedures |
| US6793653B2 (en) | 2001-12-08 | 2004-09-21 | Computer Motion, Inc. | Multifunctional handle for a medical robotic system |
| IL148702A (en) | 2002-03-14 | 2008-04-13 | Innoventions Inc | Insertion and retrieval system for inflatable devices |
| EP1496805B1 (en) | 2002-04-25 | 2012-01-11 | Tyco Healthcare Group LP | Surgical instruments including micro-electromechanical systems (mems) |
| US7674270B2 (en) * | 2002-05-02 | 2010-03-09 | Laparocision, Inc | Apparatus for positioning a medical instrument |
| CN101803938B (zh) | 2002-06-14 | 2012-06-20 | Tyco医疗健康集团 | 用于夹紧、切割及缝合组织的器械 |
| US20030038938A1 (en) | 2002-06-20 | 2003-02-27 | Jung Wayne D. | Apparatus and method for measuring optical characteristics of an object or material |
| US8182494B1 (en) | 2002-07-31 | 2012-05-22 | Cardica, Inc. | Minimally-invasive surgical system |
| US6645218B1 (en) | 2002-08-05 | 2003-11-11 | Endius Incorporated | Surgical instrument |
| US20040176751A1 (en) | 2002-08-14 | 2004-09-09 | Endovia Medical, Inc. | Robotic medical instrument system |
| US7331967B2 (en) * | 2002-09-09 | 2008-02-19 | Hansen Medical, Inc. | Surgical instrument coupling mechanism |
| CN101904734B (zh) | 2002-09-30 | 2013-01-02 | Tyco医疗健康集团 | 整装的可灭菌外科系统 |
| AU2003279151A1 (en) | 2002-10-04 | 2004-05-04 | Tyco Healthcare Group, Lp | Pneumatic powered surgical stapling device |
| US7386365B2 (en) | 2004-05-04 | 2008-06-10 | Intuitive Surgical, Inc. | Tool grip calibration for robotic surgery |
| EP2901959B1 (en) | 2002-12-06 | 2019-02-06 | Intuitive Surgical Operations, Inc. | Flexible wrist for surgical tool |
| US7559927B2 (en) | 2002-12-20 | 2009-07-14 | Medtronic Xomed, Inc. | Surgical instrument with telescoping attachment |
| JP2004208922A (ja) | 2002-12-27 | 2004-07-29 | Olympus Corp | 医療装置及び医療用マニピュレータ並びに医療装置の制御方法 |
| US7083615B2 (en) * | 2003-02-24 | 2006-08-01 | Intuitive Surgical Inc | Surgical tool having electrocautery energy supply conductor with inhibited current leakage |
| US8882657B2 (en) | 2003-03-07 | 2014-11-11 | Intuitive Surgical Operations, Inc. | Instrument having radio frequency identification systems and methods for use |
| US7380696B2 (en) | 2003-05-20 | 2008-06-03 | Ethicon Endo-Surgery, Inc. | Articulating surgical stapling instrument incorporating a two-piece E-beam firing mechanism |
| US7143923B2 (en) | 2003-05-20 | 2006-12-05 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a firing lockout for an unclosed anvil |
| US20070084897A1 (en) | 2003-05-20 | 2007-04-19 | Shelton Frederick E Iv | Articulating surgical stapling instrument incorporating a two-piece e-beam firing mechanism |
| US6988649B2 (en) | 2003-05-20 | 2006-01-24 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a spent cartridge lockout |
| US7044352B2 (en) | 2003-05-20 | 2006-05-16 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a single lockout mechanism for prevention of firing |
| US7380695B2 (en) | 2003-05-20 | 2008-06-03 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a single lockout mechanism for prevention of firing |
| US7140528B2 (en) | 2003-05-20 | 2006-11-28 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having an electroactive polymer actuated single lockout mechanism for prevention of firing |
| EP1628632B1 (en) | 2003-05-21 | 2013-10-09 | The Johns Hopkins University | Devices and systems for minimally invasive surgery of the throat and other portions of mammalian body |
| US7410483B2 (en) | 2003-05-23 | 2008-08-12 | Novare Surgical Systems, Inc. | Hand-actuated device for remote manipulation of a grasping tool |
| ES2550808T3 (es) | 2003-06-20 | 2015-11-12 | Covidien Lp | Instrumento de grapado quirúrgico |
| US9002518B2 (en) | 2003-06-30 | 2015-04-07 | Intuitive Surgical Operations, Inc. | Maximum torque driving of robotic surgical tools in robotic surgical systems |
| US7111769B2 (en) | 2003-07-09 | 2006-09-26 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating an articulation mechanism having rotation about the longitudinal axis |
| US7055731B2 (en) | 2003-07-09 | 2006-06-06 | Ethicon Endo-Surgery Inc. | Surgical stapling instrument incorporating a tapered firing bar for increased flexibility around the articulation joint |
| US6964363B2 (en) | 2003-07-09 | 2005-11-15 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having articulation joint support plates for supporting a firing bar |
| US6981628B2 (en) | 2003-07-09 | 2006-01-03 | Ethicon Endo-Surgery, Inc. | Surgical instrument with a lateral-moving articulation control |
| JP4398813B2 (ja) | 2003-07-18 | 2010-01-13 | ヤーマン株式会社 | 美肌装置 |
| US6905057B2 (en) | 2003-09-29 | 2005-06-14 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating a firing mechanism having a linked rack transmission |
| US7364061B2 (en) | 2003-09-29 | 2008-04-29 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating a multistroke firing position indicator and retraction mechanism |
| US6959852B2 (en) | 2003-09-29 | 2005-11-01 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with multistroke firing incorporating an anti-backup mechanism |
| JP4642770B2 (ja) | 2003-10-17 | 2011-03-02 | タイコ ヘルスケア グループ リミテッド パートナーシップ | 独立先端部回転を備えた外科用ステープル留めデバイス |
| US8806973B2 (en) | 2009-12-02 | 2014-08-19 | Covidien Lp | Adapters for use between surgical handle assembly and surgical end effector |
| US9055943B2 (en) | 2007-09-21 | 2015-06-16 | Covidien Lp | Hand held surgical handle assembly, surgical adapters for use between surgical handle assembly and surgical end effectors, and methods of use |
| US8968276B2 (en) | 2007-09-21 | 2015-03-03 | Covidien Lp | Hand held surgical handle assembly, surgical adapters for use between surgical handle assembly and surgical end effectors, and methods of use |
| US10588629B2 (en) | 2009-11-20 | 2020-03-17 | Covidien Lp | Surgical console and hand-held surgical device |
| US20090090763A1 (en) | 2007-10-05 | 2009-04-09 | Tyco Healthcare Group Lp | Powered surgical stapling device |
| US10022123B2 (en) | 2012-07-09 | 2018-07-17 | Covidien Lp | Surgical adapter assemblies for use between surgical handle assembly and surgical end effectors |
| US10105140B2 (en) | 2009-11-20 | 2018-10-23 | Covidien Lp | Surgical console and hand-held surgical device |
| US7172415B2 (en) | 2003-11-22 | 2007-02-06 | Flexi-Float, Llc | Equine dental grinding apparatus |
| DE10357105B3 (de) | 2003-12-06 | 2005-04-07 | Richard Wolf Gmbh | Medizinisches Instrument |
| US7172104B2 (en) | 2004-02-17 | 2007-02-06 | Tyco Healthcare Group Lp | Surgical stapling apparatus |
| EP1723913A1 (en) | 2004-03-10 | 2006-11-22 | Olympus Corporation | Treatment tool for surgery |
| US7379790B2 (en) | 2004-05-04 | 2008-05-27 | Intuitive Surgical, Inc. | Tool memory-based software upgrades for robotic surgery |
| US7059508B2 (en) | 2004-06-30 | 2006-06-13 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating an uneven multistroke firing mechanism having a rotary transmission |
| WO2006036287A2 (en) | 2004-07-27 | 2006-04-06 | Biolase Technology, Inc. | Identification connector for a medical laser handpiece |
| US7143925B2 (en) | 2004-07-28 | 2006-12-05 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating EAP blocking lockout mechanism |
| US7147138B2 (en) | 2004-07-28 | 2006-12-12 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having an electroactive polymer actuated buttress deployment mechanism |
| US7143926B2 (en) | 2005-02-07 | 2006-12-05 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating a multi-stroke firing mechanism with return spring rotary manual retraction system |
| US7487899B2 (en) | 2004-07-28 | 2009-02-10 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating EAP complete firing system lockout mechanism |
| WO2006015319A2 (en) | 2004-07-30 | 2006-02-09 | Power Medical Interventions, Inc. | Flexible shaft extender and method of using same |
| US7540872B2 (en) | 2004-09-21 | 2009-06-02 | Covidien Ag | Articulating bipolar electrosurgical instrument |
| US9261172B2 (en) | 2004-09-30 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Multi-ply strap drive trains for surgical robotic arms |
| US7922719B2 (en) | 2004-10-06 | 2011-04-12 | Biodynamics, Llc | Adjustable angle pawl handle for surgical instruments |
| ES2598134T3 (es) | 2004-10-08 | 2017-01-25 | Ethicon Endo-Surgery, Llc | Instrumento ultrasónico quirúrgico |
| US9700334B2 (en) | 2004-11-23 | 2017-07-11 | Intuitive Surgical Operations, Inc. | Articulating mechanisms and link systems with torque transmission in remote manipulation of instruments and tools |
| WO2006063156A1 (en) | 2004-12-09 | 2006-06-15 | Stryker Corporation | Wireless system for providing instrument and implant data to a surgical navigation unit |
| US20060142740A1 (en) | 2004-12-29 | 2006-06-29 | Sherman Jason T | Method and apparatus for performing a voice-assisted orthopaedic surgical procedure |
| JP2008528197A (ja) | 2005-01-28 | 2008-07-31 | マサチユセツツ・ジエネラル・ホスピタル | ガイド及び挿入システム |
| US8465474B2 (en) | 2009-05-19 | 2013-06-18 | Intuitive Surgical Operations, Inc. | Cleaning of a surgical instrument force sensor |
| US8496647B2 (en) | 2007-12-18 | 2013-07-30 | Intuitive Surgical Operations, Inc. | Ribbed force sensor |
| US8147503B2 (en) | 2007-09-30 | 2012-04-03 | Intuitive Surgical Operations Inc. | Methods of locating and tracking robotic instruments in robotic surgical systems |
| US8108072B2 (en) | 2007-09-30 | 2012-01-31 | Intuitive Surgical Operations, Inc. | Methods and systems for robotic instrument tool tracking with adaptive fusion of kinematics information and image information |
| US7822458B2 (en) | 2005-05-19 | 2010-10-26 | The Johns Hopkins University | Distal bevel-tip needle control device and algorithm |
| US8398541B2 (en) | 2006-06-06 | 2013-03-19 | Intuitive Surgical Operations, Inc. | Interactive user interfaces for robotic minimally invasive surgical systems |
| EP1736112B1 (en) | 2005-06-20 | 2011-08-17 | Heribert Schmid | Medical device |
| US8273076B2 (en) | 2005-06-30 | 2012-09-25 | Intuitive Surgical Operations, Inc. | Indicator for tool state and communication in multi-arm robotic telesurgery |
| EP3395508A1 (en) * | 2005-06-30 | 2018-10-31 | Intuitive Surgical Operations Inc. | Indicator for tool state communication in multi-arm robotic telesurgery |
| US8627995B2 (en) | 2006-05-19 | 2014-01-14 | Ethicon Endo-Sugery, Inc. | Electrically self-powered surgical instrument with cryptographic identification of interchangeable part |
| US8573462B2 (en) | 2006-05-19 | 2013-11-05 | Ethicon Endo-Surgery, Inc. | Electrical surgical instrument with optimized power supply and drive |
| US8579176B2 (en) | 2005-07-26 | 2013-11-12 | Ethicon Endo-Surgery, Inc. | Surgical stapling and cutting device and method for using the device |
| EP2799014B1 (en) | 2005-07-27 | 2018-09-05 | Covidien LP | Surgical stapler with a drive shaft with optical rotation encoding |
| US20070029363A1 (en) | 2005-08-07 | 2007-02-08 | Sergey Popov | Surgical apparatus with remote drive |
| US8579178B2 (en) | 2005-08-15 | 2013-11-12 | Covidien Lp | Surgical stapling instruments including a cartridge having multiple staples sizes |
| WO2007026354A1 (en) | 2005-08-29 | 2007-03-08 | Galil Medical Ltd. | Multiple sensor device for measuring tissue temperature during thermal treatment |
| US7407078B2 (en) | 2005-09-21 | 2008-08-05 | Ehthicon Endo-Surgery, Inc. | Surgical stapling instrument having force controlled spacing end effector |
| US8079950B2 (en) | 2005-09-29 | 2011-12-20 | Intuitive Surgical Operations, Inc. | Autofocus and/or autoscaling in telesurgery |
| AU2006222756B2 (en) | 2005-09-30 | 2012-09-27 | Ethicon Endo-Surgery, Inc. | Electroactive polymer-based articulation mechanism for linear surgical stapler |
| US7641091B2 (en) | 2005-10-04 | 2010-01-05 | Tyco Healthcare Group Lp | Staple drive assembly |
| US20070102472A1 (en) | 2005-11-04 | 2007-05-10 | Ethicon Endo-Surgery, Inc. | Electrosurgical stapling instrument with disposable severing / stapling unit |
| US7328828B2 (en) | 2005-11-04 | 2008-02-12 | Ethicon Endo-Surgery, Inc, | Lockout mechanisms and surgical instruments including same |
| US7799039B2 (en) | 2005-11-09 | 2010-09-21 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a hydraulically actuated end effector |
| US7673780B2 (en) | 2005-11-09 | 2010-03-09 | Ethicon Endo-Surgery, Inc. | Articulation joint with improved moment arm extension for articulating an end effector of a surgical instrument |
| US20070106317A1 (en) | 2005-11-09 | 2007-05-10 | Shelton Frederick E Iv | Hydraulically and electrically actuated articulation joints for surgical instruments |
| US7246734B2 (en) | 2005-12-05 | 2007-07-24 | Ethicon Endo-Surgery, Inc. | Rotary hydraulic pump actuated multi-stroke surgical instrument |
| US7453227B2 (en) | 2005-12-20 | 2008-11-18 | Intuitive Surgical, Inc. | Medical robotic system with sliding mode control |
| CN101340852B (zh) | 2005-12-20 | 2011-12-28 | 直观外科手术操作公司 | 机器人外科系统的器械对接装置 |
| US7819859B2 (en) | 2005-12-20 | 2010-10-26 | Intuitive Surgical Operations, Inc. | Control system for reducing internally generated frictional and inertial resistance to manual positioning of a surgical manipulator |
| JP5043414B2 (ja) * | 2005-12-20 | 2012-10-10 | インテュイティブ サージカル インコーポレイテッド | 無菌外科手術アダプタ |
| WO2007075844A1 (en) * | 2005-12-20 | 2007-07-05 | Intuitive Surgical, Inc. | Telescoping insertion axis of a robotic surgical system |
| US8672922B2 (en) | 2005-12-20 | 2014-03-18 | Intuitive Surgical Operations, Inc. | Wireless communication in a robotic surgical system |
| US8182470B2 (en) | 2005-12-20 | 2012-05-22 | Intuitive Surgical Operations, Inc. | Telescoping insertion axis of a robotic surgical system |
| US7689320B2 (en) | 2005-12-20 | 2010-03-30 | Intuitive Surgical Operations, Inc. | Robotic surgical system with joint motion controller adapted to reduce instrument tip vibrations |
| US7762825B2 (en) | 2005-12-20 | 2010-07-27 | Intuitive Surgical Operations, Inc. | Electro-mechanical interfaces to mount robotic surgical arms |
| US9241767B2 (en) | 2005-12-20 | 2016-01-26 | Intuitive Surgical Operations, Inc. | Method for handling an operator command exceeding a medical device state limitation in a medical robotic system |
| US7741802B2 (en) | 2005-12-20 | 2010-06-22 | Intuitive Surgical Operations, Inc. | Medical robotic system with programmably controlled constraints on error dynamics |
| US7756036B2 (en) | 2005-12-22 | 2010-07-13 | Intuitive Surgical Operations, Inc. | Synchronous data communication |
| US8054752B2 (en) | 2005-12-22 | 2011-11-08 | Intuitive Surgical Operations, Inc. | Synchronous data communication |
| US7757028B2 (en) | 2005-12-22 | 2010-07-13 | Intuitive Surgical Operations, Inc. | Multi-priority messaging |
| US7481824B2 (en) | 2005-12-30 | 2009-01-27 | Ethicon Endo-Surgery, Inc. | Surgical instrument with bending articulation controlled articulation pivot joint |
| US7907166B2 (en) | 2005-12-30 | 2011-03-15 | Intuitive Surgical Operations, Inc. | Stereo telestration for robotic surgery |
| US8628518B2 (en) | 2005-12-30 | 2014-01-14 | Intuitive Surgical Operations, Inc. | Wireless force sensor on a distal portion of a surgical instrument and method |
| US7930065B2 (en) | 2005-12-30 | 2011-04-19 | Intuitive Surgical Operations, Inc. | Robotic surgery system including position sensors using fiber bragg gratings |
| US7835823B2 (en) | 2006-01-05 | 2010-11-16 | Intuitive Surgical Operations, Inc. | Method for tracking and reporting usage events to determine when preventive maintenance is due for a medical robotic system |
| US7670334B2 (en) | 2006-01-10 | 2010-03-02 | Ethicon Endo-Surgery, Inc. | Surgical instrument having an articulating end effector |
| US7644848B2 (en) | 2006-01-31 | 2010-01-12 | Ethicon Endo-Surgery, Inc. | Electronic lockouts and surgical instrument including same |
| US7568603B2 (en) | 2006-01-31 | 2009-08-04 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with articulatable end effector |
| US20070175955A1 (en) | 2006-01-31 | 2007-08-02 | Shelton Frederick E Iv | Surgical cutting and fastening instrument with closure trigger locking mechanism |
| US7575144B2 (en) | 2006-01-31 | 2009-08-18 | Ethicon Endo-Surgery, Inc. | Surgical fastener and cutter with single cable actuator |
| US7770775B2 (en) | 2006-01-31 | 2010-08-10 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with adaptive user feedback |
| US8708213B2 (en) | 2006-01-31 | 2014-04-29 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a feedback system |
| US8186555B2 (en) | 2006-01-31 | 2012-05-29 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with mechanical closure system |
| US7464849B2 (en) | 2006-01-31 | 2008-12-16 | Ethicon Endo-Surgery, Inc. | Electro-mechanical surgical instrument with closure system and anvil alignment components |
| US7464846B2 (en) | 2006-01-31 | 2008-12-16 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a removable battery |
| US7766210B2 (en) | 2006-01-31 | 2010-08-03 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with user feedback system |
| US7845537B2 (en) | 2006-01-31 | 2010-12-07 | Ethicon Endo-Surgery, Inc. | Surgical instrument having recording capabilities |
| US7422139B2 (en) | 2006-01-31 | 2008-09-09 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting fastening instrument with tactile position feedback |
| US20070175951A1 (en) | 2006-01-31 | 2007-08-02 | Shelton Frederick E Iv | Gearing selector for a powered surgical cutting and fastening instrument |
| US20070175950A1 (en) | 2006-01-31 | 2007-08-02 | Shelton Frederick E Iv | Disposable staple cartridge having an anvil with tissue locator for use with a surgical cutting and fastening instrument and modular end effector system therefor |
| US7416101B2 (en) | 2006-01-31 | 2008-08-26 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with loading force feedback |
| EP1815950A1 (en) | 2006-02-03 | 2007-08-08 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Robotic surgical system for performing minimally invasive medical procedures |
| US8992422B2 (en) | 2006-03-23 | 2015-03-31 | Ethicon Endo-Surgery, Inc. | Robotically-controlled endoscopic accessory channel |
| US8597182B2 (en) | 2006-04-28 | 2013-12-03 | Intuitive Surgical Operations, Inc. | Robotic endoscopic retractor for use in minimally invasive surgery |
| US8597280B2 (en) | 2006-06-13 | 2013-12-03 | Intuitive Surgical Operations, Inc. | Surgical instrument actuator |
| US8551076B2 (en) | 2006-06-13 | 2013-10-08 | Intuitive Surgical Operations, Inc. | Retrograde instrument |
| US8062211B2 (en) | 2006-06-13 | 2011-11-22 | Intuitive Surgical Operations, Inc. | Retrograde instrument |
| EP2038712B2 (en) | 2006-06-13 | 2019-08-28 | Intuitive Surgical Operations, Inc. | Control system configured to compensate for non-ideal actuator-to-joint linkage characteristics in a medical robotic system |
| US20090192523A1 (en) | 2006-06-29 | 2009-07-30 | Intuitive Surgical, Inc. | Synthetic representation of a surgical instrument |
| US9718190B2 (en) | 2006-06-29 | 2017-08-01 | Intuitive Surgical Operations, Inc. | Tool position and identification indicator displayed in a boundary area of a computer display screen |
| US10008017B2 (en) | 2006-06-29 | 2018-06-26 | Intuitive Surgical Operations, Inc. | Rendering tool information as graphic overlays on displayed images of tools |
| US8151661B2 (en) | 2006-06-30 | 2012-04-10 | Intuituve Surgical Operations, Inc. | Compact capstan |
| US7391173B2 (en) | 2006-06-30 | 2008-06-24 | Intuitive Surgical, Inc | Mechanically decoupled capstan drive |
| US20080029574A1 (en) | 2006-08-02 | 2008-02-07 | Shelton Frederick E | Pneumatically powered surgical cutting and fastening instrument with actuator at distal end |
| US20080029573A1 (en) | 2006-08-02 | 2008-02-07 | Shelton Frederick E | Pneumatically powered surgical cutting and fastening instrument with replaceable power sources |
| US7740159B2 (en) | 2006-08-02 | 2010-06-22 | Ethicon Endo-Surgery, Inc. | Pneumatically powered surgical cutting and fastening instrument with a variable control of the actuating rate of firing with mechanical power assist |
| JP4654165B2 (ja) | 2006-08-08 | 2011-03-16 | テルモ株式会社 | 作業機構及びマニピュレータ |
| US9554843B2 (en) | 2006-09-01 | 2017-01-31 | Conmed Corporation | Adapter and method for converting gas-enhanced electrosurgical coagulation instrument for cutting |
| US7967178B2 (en) | 2006-10-06 | 2011-06-28 | Tyco Healthcare Group Lp | Grasping jaw mechanism |
| US7637410B2 (en) | 2006-10-06 | 2009-12-29 | Tyco Healthcare Group Lp | Surgical instrument including a locking assembly |
| US8733614B2 (en) | 2006-10-06 | 2014-05-27 | Covidien Lp | End effector identification by mechanical features |
| US7736254B2 (en) | 2006-10-12 | 2010-06-15 | Intuitive Surgical Operations, Inc. | Compact cable tension tender device |
| DE602007007031D1 (de) * | 2006-10-13 | 2010-07-22 | Toshiba Kk | Manipulator |
| US8157793B2 (en) * | 2006-10-25 | 2012-04-17 | Terumo Kabushiki Kaisha | Manipulator for medical use |
| JP5085996B2 (ja) | 2006-10-25 | 2012-11-28 | テルモ株式会社 | マニピュレータシステム |
| US20080109012A1 (en) | 2006-11-03 | 2008-05-08 | General Electric Company | System, method and apparatus for tableside remote connections of medical instruments and systems using wireless communications |
| US8882113B2 (en) | 2006-11-09 | 2014-11-11 | Westport Medical, Inc. | Bit holders |
| US7721930B2 (en) | 2006-11-10 | 2010-05-25 | Thicon Endo-Surgery, Inc. | Disposable cartridge with adhesive for use with a stapling device |
| US7935130B2 (en) | 2006-11-16 | 2011-05-03 | Intuitive Surgical Operations, Inc. | Two-piece end-effectors for robotic surgical tools |
| WO2008061313A1 (en) | 2006-11-24 | 2008-05-29 | Mems-Id Pty Ltd | Tagging methods and apparatus |
| US9226648B2 (en) | 2006-12-21 | 2016-01-05 | Intuitive Surgical Operations, Inc. | Off-axis visualization systems |
| US7954682B2 (en) | 2007-01-10 | 2011-06-07 | Ethicon Endo-Surgery, Inc. | Surgical instrument with elements to communicate between control unit and end effector |
| US7738971B2 (en) | 2007-01-10 | 2010-06-15 | Ethicon Endo-Surgery, Inc. | Post-sterilization programming of surgical instruments |
| US7721931B2 (en) | 2007-01-10 | 2010-05-25 | Ethicon Endo-Surgery, Inc. | Prevention of cartridge reuse in a surgical instrument |
| US7900805B2 (en) | 2007-01-10 | 2011-03-08 | Ethicon Endo-Surgery, Inc. | Surgical instrument with enhanced battery performance |
| EP2131773B1 (en) | 2007-02-05 | 2011-11-23 | Novian Health Inc. | Interstitial laser therapy kits and interstitial laser therapy control system |
| US8011550B2 (en) | 2009-03-31 | 2011-09-06 | Tyco Healthcare Group Lp | Surgical stapling apparatus |
| AU2008223389B2 (en) | 2007-03-06 | 2013-07-11 | Covidien Lp | Surgical stapling apparatus |
| US7422136B1 (en) | 2007-03-15 | 2008-09-09 | Tyco Healthcare Group Lp | Powered surgical stapling device |
| EP2139422B1 (en) | 2007-03-26 | 2016-10-26 | Hansen Medical, Inc. | Robotic catheter systems and methods |
| US8056787B2 (en) | 2007-03-28 | 2011-11-15 | Ethicon Endo-Surgery, Inc. | Surgical stapling and cutting instrument with travel-indicating retraction member |
| US8893946B2 (en) | 2007-03-28 | 2014-11-25 | Ethicon Endo-Surgery, Inc. | Laparoscopic tissue thickness and clamp load measuring devices |
| JP5090045B2 (ja) | 2007-04-03 | 2012-12-05 | テルモ株式会社 | マニピュレータ及びその制御方法 |
| US20080255413A1 (en) | 2007-04-13 | 2008-10-16 | Michael Zemlok | Powered surgical instrument |
| US20080251561A1 (en) | 2007-04-13 | 2008-10-16 | Chad Eades | Quick connect base plate for powder actuated tool |
| US8800837B2 (en) | 2007-04-13 | 2014-08-12 | Covidien Lp | Powered surgical instrument |
| US7708182B2 (en) | 2007-04-17 | 2010-05-04 | Tyco Healthcare Group Lp | Flexible endoluminal surgical instrument |
| WO2008131362A2 (en) | 2007-04-20 | 2008-10-30 | Doheny Eye Institute | Personal surgical center |
| EP3150180B1 (en) | 2007-04-20 | 2019-06-12 | Doheny Eye Institute | Independent surgical center |
| WO2008133956A2 (en) | 2007-04-23 | 2008-11-06 | Hansen Medical, Inc. | Robotic instrument control system |
| US7549564B2 (en) | 2007-06-22 | 2009-06-23 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with an articulating end effector |
| US8534528B2 (en) | 2007-06-04 | 2013-09-17 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a multiple rate directional switching mechanism |
| US8931682B2 (en) | 2007-06-04 | 2015-01-13 | Ethicon Endo-Surgery, Inc. | Robotically-controlled shaft based rotary drive systems for surgical instruments |
| US8903546B2 (en) | 2009-08-15 | 2014-12-02 | Intuitive Surgical Operations, Inc. | Smooth control of an articulated instrument across areas with different work space conditions |
| US9084623B2 (en) | 2009-08-15 | 2015-07-21 | Intuitive Surgical Operations, Inc. | Controller assisted reconfiguration of an articulated instrument during movement into and out of an entry guide |
| US8620473B2 (en) | 2007-06-13 | 2013-12-31 | Intuitive Surgical Operations, Inc. | Medical robotic system with coupled control modes |
| US9138129B2 (en) | 2007-06-13 | 2015-09-22 | Intuitive Surgical Operations, Inc. | Method and system for moving a plurality of articulated instruments in tandem back towards an entry guide |
| US9096033B2 (en) | 2007-06-13 | 2015-08-04 | Intuitive Surgical Operations, Inc. | Surgical system instrument sterile adapter |
| US7588176B2 (en) | 2007-06-18 | 2009-09-15 | Ethicon Endo-Surgery, Inc. | Surgical cutting instrument with improved closure system |
| EP2233081B2 (en) | 2007-09-21 | 2018-03-28 | Covidien LP | Surgical device |
| CN101801283B (zh) | 2007-09-21 | 2012-07-18 | Tyco医疗健康集团 | 手术器械 |
| US9023014B2 (en) | 2007-09-21 | 2015-05-05 | Covidien Lp | Quick connect assembly for use between surgical handle assembly and surgical accessories |
| US8224484B2 (en) | 2007-09-30 | 2012-07-17 | Intuitive Surgical Operations, Inc. | Methods of user interface with alternate tool mode for robotic surgical tools |
| EP2044888B1 (en) | 2007-10-05 | 2016-12-07 | Covidien LP | Articulation mechanism for a surgical instrument |
| US20130214025A1 (en) | 2007-10-05 | 2013-08-22 | Covidien Lp | Powered surgical stapling device |
| US8012170B2 (en) | 2009-04-27 | 2011-09-06 | Tyco Healthcare Group Lp | Device and method for controlling compression of tissue |
| US8960520B2 (en) | 2007-10-05 | 2015-02-24 | Covidien Lp | Method and apparatus for determining parameters of linear motion in a surgical instrument |
| US10779818B2 (en) | 2007-10-05 | 2020-09-22 | Covidien Lp | Powered surgical stapling device |
| US8967443B2 (en) | 2007-10-05 | 2015-03-03 | Covidien Lp | Method and apparatus for determining parameters of linear motion in a surgical instrument |
| US8517241B2 (en) | 2010-04-16 | 2013-08-27 | Covidien Lp | Hand-held surgical devices |
| US7922063B2 (en) | 2007-10-31 | 2011-04-12 | Tyco Healthcare Group, Lp | Powered surgical instrument |
| US8758342B2 (en) | 2007-11-28 | 2014-06-24 | Covidien Ag | Cordless power-assisted medical cauterization and cutting device |
| WO2009073577A2 (en) | 2007-11-29 | 2009-06-11 | Surgiquest, Inc. | Surgical instruments with improved dexterity for use in minimally invasive surgical procedures |
| US8561473B2 (en) | 2007-12-18 | 2013-10-22 | Intuitive Surgical Operations, Inc. | Force sensor temperature compensation |
| US20090171147A1 (en) | 2007-12-31 | 2009-07-02 | Woojin Lee | Surgical instrument |
| US8647258B2 (en) | 2008-01-10 | 2014-02-11 | Covidien Lp | Apparatus for endoscopic procedures |
| EP2240083B8 (en) | 2008-01-10 | 2015-08-19 | Covidien LP | Imaging system for a surgical device |
| DE102008005901B4 (de) * | 2008-01-24 | 2018-08-09 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Sterilbarriere für einen chirurgischen Roboter mit Drehmomentsensoren |
| TW200934621A (en) | 2008-02-01 | 2009-08-16 | Mobiletron Electronics Co Ltd | Extended transmission rod for power tool |
| US7793812B2 (en) | 2008-02-14 | 2010-09-14 | Ethicon Endo-Surgery, Inc. | Disposable motor-driven loading unit for use with a surgical cutting and stapling apparatus |
| US7857185B2 (en) | 2008-02-14 | 2010-12-28 | Ethicon Endo-Surgery, Inc. | Disposable loading unit for surgical stapling apparatus |
| US7819298B2 (en) | 2008-02-14 | 2010-10-26 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with control features operable with one hand |
| US8657174B2 (en) | 2008-02-14 | 2014-02-25 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument having handle based power source |
| US8758391B2 (en) | 2008-02-14 | 2014-06-24 | Ethicon Endo-Surgery, Inc. | Interchangeable tools for surgical instruments |
| US7959051B2 (en) | 2008-02-15 | 2011-06-14 | Ethicon Endo-Surgery, Inc. | Closure systems for a surgical cutting and stapling instrument |
| US20090206131A1 (en) | 2008-02-15 | 2009-08-20 | Ethicon Endo-Surgery, Inc. | End effector coupling arrangements for a surgical cutting and stapling instrument |
| US8733611B2 (en) | 2008-03-12 | 2014-05-27 | Covidien Lp | Ratcheting mechanism for surgical stapling device |
| JP2009226028A (ja) | 2008-03-24 | 2009-10-08 | Terumo Corp | マニピュレータ |
| US8808164B2 (en) | 2008-03-28 | 2014-08-19 | Intuitive Surgical Operations, Inc. | Controlling a robotic surgical tool with a display monitor |
| US8155479B2 (en) | 2008-03-28 | 2012-04-10 | Intuitive Surgical Operations Inc. | Automated panning and digital zooming for robotic surgical systems |
| US9895813B2 (en) | 2008-03-31 | 2018-02-20 | Intuitive Surgical Operations, Inc. | Force and torque sensing in a surgical robot setup arm |
| US7843158B2 (en) | 2008-03-31 | 2010-11-30 | Intuitive Surgical Operations, Inc. | Medical robotic system adapted to inhibit motions resulting in excessive end effector forces |
| US7886743B2 (en) | 2008-03-31 | 2011-02-15 | Intuitive Surgical Operations, Inc. | Sterile drape interface for robotic surgical instrument |
| US20090254094A1 (en) | 2008-04-08 | 2009-10-08 | Knapp Troy D | Ratcheting mechanical driver for cannulated surgical systems |
| WO2009132359A2 (en) | 2008-04-25 | 2009-10-29 | Downey Earl C | Laparoscopic surgical instrument |
| US7922061B2 (en) | 2008-05-21 | 2011-04-12 | Ethicon Endo-Surgery, Inc. | Surgical instrument with automatically reconfigurable articulating end effector |
| US8403926B2 (en) | 2008-06-05 | 2013-03-26 | Ethicon Endo-Surgery, Inc. | Manually articulating devices |
| CN102014759B (zh) * | 2008-06-11 | 2012-12-26 | 韩商未来股份有限公司 | 用于手术机器人臂的仪器 |
| JP5135069B2 (ja) * | 2008-06-12 | 2013-01-30 | 三鷹光器株式会社 | 医療用器具保持アーム装置 |
| JP2009297326A (ja) | 2008-06-16 | 2009-12-24 | Konica Minolta Medical & Graphic Inc | 超音波探触子および超音波診断装置 |
| US9265567B2 (en) | 2008-06-30 | 2016-02-23 | Intuitive Surgical Operations, Inc. | Vessel sealing instrument with stepped jaw |
| US8540748B2 (en) | 2008-07-07 | 2013-09-24 | Intuitive Surgical Operations, Inc. | Surgical instrument wrist |
| US8821480B2 (en) | 2008-07-16 | 2014-09-02 | Intuitive Surgical Operations, Inc. | Four-cable wrist with solid surface cable channels |
| US8771270B2 (en) | 2008-07-16 | 2014-07-08 | Intuitive Surgical Operations, Inc. | Bipolar cautery instrument |
| US9204923B2 (en) | 2008-07-16 | 2015-12-08 | Intuitive Surgical Operations, Inc. | Medical instrument electronically energized using drive cables |
| US20100023022A1 (en) | 2008-07-25 | 2010-01-28 | Zeiner Mark S | Reloadable laparoscopic fastener deploying device with disposable cartridge use in a gastric volume reduction procedure |
| JP5575379B2 (ja) | 2008-07-25 | 2014-08-20 | 東京電力株式会社 | 圧縮機及び冷凍機 |
| US8559351B2 (en) | 2008-08-01 | 2013-10-15 | Qualcomm Incorporated | Dedicated reference signal design for network MIMO |
| KR101056232B1 (ko) | 2008-09-12 | 2011-08-11 | 정창욱 | 최소 침습 수술 도구 및 그 사용 방법 |
| US20100069942A1 (en) | 2008-09-18 | 2010-03-18 | Ethicon Endo-Surgery, Inc. | Surgical instrument with apparatus for measuring elapsed time between actions |
| US7988028B2 (en) | 2008-09-23 | 2011-08-02 | Tyco Healthcare Group Lp | Surgical instrument having an asymmetric dynamic clamping member |
| US8210411B2 (en) | 2008-09-23 | 2012-07-03 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument |
| US9386983B2 (en) | 2008-09-23 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Robotically-controlled motorized surgical instrument |
| US8315720B2 (en) | 2008-09-26 | 2012-11-20 | Intuitive Surgical Operations, Inc. | Method for graphically providing continuous change of state directions to a user of a medical robotic system |
| US8372057B2 (en) | 2008-10-10 | 2013-02-12 | Coeur, Inc. | Luer lock adapter |
| US8020743B2 (en) | 2008-10-15 | 2011-09-20 | Ethicon Endo-Surgery, Inc. | Powered articulatable surgical cutting and fastening instrument with flexible drive member |
| DE102008053842B4 (de) | 2008-10-30 | 2010-08-26 | Kirchner, Hilmar O. | Chirurgische Zerspanvorrichtung |
| US9687986B2 (en) | 2008-11-11 | 2017-06-27 | Intuitive Surgical Operations, Inc. | Robotic linkage |
| US8161838B2 (en) | 2008-12-22 | 2012-04-24 | Intuitive Surgical Operations, Inc. | Method and apparatus for reducing at least one friction force opposing an axial force exerted through an actuator element |
| US8335590B2 (en) | 2008-12-23 | 2012-12-18 | Intuitive Surgical Operations, Inc. | System and method for adjusting an image capturing device attribute using an unused degree-of-freedom of a master control device |
| US8374723B2 (en) | 2008-12-31 | 2013-02-12 | Intuitive Surgical Operations, Inc. | Obtaining force information in a minimally invasive surgical procedure |
| US8594841B2 (en) | 2008-12-31 | 2013-11-26 | Intuitive Surgical Operations, Inc. | Visual force feedback in a minimally invasive surgical procedure |
| US8602031B2 (en) * | 2009-01-12 | 2013-12-10 | Hansen Medical, Inc. | Modular interfaces and drive actuation through barrier |
| US8517239B2 (en) | 2009-02-05 | 2013-08-27 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument comprising a magnetic element driver |
| US8858547B2 (en) | 2009-03-05 | 2014-10-14 | Intuitive Surgical Operations, Inc. | Cut and seal instrument |
| US8423182B2 (en) | 2009-03-09 | 2013-04-16 | Intuitive Surgical Operations, Inc. | Adaptable integrated energy control system for electrosurgical tools in robotic surgical systems |
| US8418073B2 (en) | 2009-03-09 | 2013-04-09 | Intuitive Surgical Operations, Inc. | User interfaces for electrosurgical tools in robotic surgical systems |
| US8120301B2 (en) | 2009-03-09 | 2012-02-21 | Intuitive Surgical Operations, Inc. | Ergonomic surgeon control console in robotic surgical systems |
| US8365972B2 (en) | 2009-03-31 | 2013-02-05 | Covidien Lp | Surgical stapling apparatus |
| US8348126B2 (en) | 2009-03-31 | 2013-01-08 | Covidien Lp | Crimp and release of suture holding buttress material |
| US8016178B2 (en) | 2009-03-31 | 2011-09-13 | Tyco Healthcare Group Lp | Surgical stapling apparatus |
| US7967179B2 (en) | 2009-03-31 | 2011-06-28 | Tyco Healthcare Group Lp | Center cinch and release of buttress material |
| US8801739B2 (en) | 2009-04-17 | 2014-08-12 | Spine View, Inc. | Devices and methods for arched roof cutters |
| US8827134B2 (en) | 2009-06-19 | 2014-09-09 | Covidien Lp | Flexible surgical stapler with motor in the head |
| US8423186B2 (en) | 2009-06-30 | 2013-04-16 | Intuitive Surgical Operations, Inc. | Ratcheting for master alignment of a teleoperated minimally-invasive surgical instrument |
| KR101180665B1 (ko) | 2009-07-03 | 2012-09-07 | 주식회사 이턴 | 하이브리드 수술용 로봇 시스템 및 수술용 로봇 제어방법 |
| US8146790B2 (en) | 2009-07-11 | 2012-04-03 | Tyco Healthcare Group Lp | Surgical instrument with safety mechanism |
| US8314354B2 (en) | 2009-07-27 | 2012-11-20 | Apple Inc. | Accessory controller for electronic devices |
| KR100947491B1 (ko) | 2009-08-07 | 2010-03-17 | 주식회사 래보 | 외과 수술용 장치의 인스트루먼트 |
| US8465476B2 (en) | 2009-09-23 | 2013-06-18 | Intuitive Surgical Operations, Inc. | Cannula mounting fixture |
| CN107028660A (zh) * | 2009-09-23 | 2017-08-11 | 伊顿株式会社 | 无菌适配器、转轮联接结构以及手术用器械的联接结构 |
| US20110071541A1 (en) * | 2009-09-23 | 2011-03-24 | Intuitive Surgical, Inc. | Curved cannula |
| US20110077673A1 (en) | 2009-09-29 | 2011-03-31 | Cardiovascular Systems, Inc. | Rotational atherectomy device with frictional clutch having magnetic normal force |
| ES2333509B2 (es) | 2009-10-07 | 2011-01-03 | Universidad De Cantabria | Instrumento para cirugia endoscopica. |
| US8157151B2 (en) | 2009-10-15 | 2012-04-17 | Tyco Healthcare Group Lp | Staple line reinforcement for anvil and cartridge |
| US8322590B2 (en) | 2009-10-28 | 2012-12-04 | Covidien Lp | Surgical stapling instrument |
| BR112012011435B1 (pt) * | 2009-11-13 | 2020-06-23 | Intuitive Surgical Operations, Inc. | Mecanismo de instrumento cirúrgico, conjunto robótico de instrumento cirúrgico e sistema robótico de instrumento cirúrgico |
| US9259275B2 (en) | 2009-11-13 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Wrist articulation by linked tension members |
| CN104958106B (zh) | 2009-11-13 | 2018-06-01 | 直观外科手术操作公司 | 具有紧凑腕部的手术工具 |
| KR102077004B1 (ko) | 2009-11-13 | 2020-02-13 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 여분의 닫힘 메커니즘을 구비한 단부 작동기 |
| US8561871B2 (en) | 2009-12-31 | 2013-10-22 | Covidien Lp | Indicators for surgical staplers |
| US8376937B2 (en) | 2010-01-28 | 2013-02-19 | Warsaw Orhtopedic, Inc. | Tissue monitoring surgical retractor system |
| EP2533678B1 (en) | 2010-02-11 | 2020-03-25 | Intuitive Surgical Operations, Inc. | System for automatically maintaining an operator selected roll orientation at a distal tip of a robotic endoscope |
| US8292889B2 (en) * | 2010-02-26 | 2012-10-23 | Tyco Healthcare Group Lp | Drive mechanism for articulation of a surgical instrument |
| KR101765727B1 (ko) | 2010-09-01 | 2017-08-08 | (주)미래컴퍼니 | 수술용 인스트루먼트의 커플링 구조 및 원점 조정 방법 |
| WO2011108840A2 (ko) | 2010-03-05 | 2011-09-09 | 주식회사 이턴 | 수술용 인스트루먼트, 수술용 인스트루먼트의 커플링 구조 및 원점 조정 방법 |
| US8074859B2 (en) | 2010-03-31 | 2011-12-13 | Tyco Healthcare Group Lp | Surgical instrument |
| IT1399603B1 (it) | 2010-04-26 | 2013-04-26 | Scuola Superiore Di Studi Universitari E Di Perfez | Apparato robotico per interventi di chirurgia minimamente invasiva |
| US8562592B2 (en) | 2010-05-07 | 2013-10-22 | Ethicon Endo-Surgery, Inc. | Compound angle laparoscopic methods and devices |
| US8644988B2 (en) | 2010-05-14 | 2014-02-04 | Intuitive Surgical Operations, Inc. | Drive force control in medical instrument providing position measurements |
| US9019345B2 (en) | 2010-07-02 | 2015-04-28 | Intuitive Surgical Operations, Inc. | Imaging mode blooming suppression |
| US9149324B2 (en) | 2010-07-08 | 2015-10-06 | Ethicon Endo-Surgery, Inc. | Surgical instrument comprising an articulatable end effector |
| CN102985024B (zh) | 2010-07-09 | 2015-09-30 | 直观外科手术操作公司 | 电外科工具罩 |
| US8968337B2 (en) | 2010-07-28 | 2015-03-03 | Covidien Lp | Articulating clip applier |
| CN101966093B (zh) | 2010-09-28 | 2012-01-11 | 常州市康迪医用吻合器有限公司 | 带有可更换钉仓的腔镜外科切割吻合器 |
| US8752699B2 (en) | 2010-09-30 | 2014-06-17 | Ethicon Endo-Surgery, Inc. | Implantable fastener cartridge comprising bioabsorbable layers |
| US8292150B2 (en) | 2010-11-02 | 2012-10-23 | Tyco Healthcare Group Lp | Adapter for powered surgical devices |
| DE102010043584A1 (de) | 2010-11-08 | 2012-05-10 | Kuka Laboratories Gmbh | Medizinscher Arbeitsplatz |
| US20120116368A1 (en) | 2010-11-10 | 2012-05-10 | Viola Frank J | Surgical instrument with add-on power adapter for accessory |
| US9198729B2 (en) * | 2010-11-15 | 2015-12-01 | Intuitive Surgical Operations, Inc. | Actuation cable having multiple friction characteristics |
| KR101993815B1 (ko) | 2010-11-15 | 2019-06-27 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 수술 기구에서 기구 샤프트 감김과 단부 작동기 작동의 해제 |
| US8523043B2 (en) | 2010-12-07 | 2013-09-03 | Immersion Corporation | Surgical stapler having haptic feedback |
| US8348130B2 (en) | 2010-12-10 | 2013-01-08 | Covidien Lp | Surgical apparatus including surgical buttress |
| US9241766B2 (en) | 2010-12-22 | 2016-01-26 | Intuitive Surgical Operations, Inc. | Alternate instrument removal |
| US8936614B2 (en) | 2010-12-30 | 2015-01-20 | Covidien Lp | Combined unilateral/bilateral jaws on a surgical instrument |
| US8517242B2 (en) | 2011-01-04 | 2013-08-27 | Covidien Lp | Surgical fastener-applying apparatuses with sequential firing |
| CN102028548B (zh) | 2011-01-14 | 2012-03-07 | 哈尔滨工业大学 | 腹腔微创手术机器人用夹钳式手术器械 |
| WO2012112622A2 (en) | 2011-02-14 | 2012-08-23 | The Board Of Trustees Of The Leland Stanford Jr. University | Apparatus, systems, and methods for performing laparoscopic surgery |
| JP6113666B2 (ja) | 2011-02-15 | 2017-04-12 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | ステープル又は血管シール器具におけるナイフ位置のインジケータ |
| US9393017B2 (en) | 2011-02-15 | 2016-07-19 | Intuitive Surgical Operations, Inc. | Methods and systems for detecting staple cartridge misfire or failure |
| JP6293486B2 (ja) | 2011-02-15 | 2018-03-14 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | クランプ又は発射の不成功を検出するシステム |
| EP3308723B1 (en) | 2011-02-15 | 2021-03-10 | Intuitive Surgical Operations Inc. | Systems for indicating a clamping prediction |
| US9055961B2 (en) | 2011-02-18 | 2015-06-16 | Intuitive Surgical Operations, Inc. | Fusing and cutting surgical instrument and related methods |
| US9549758B2 (en) | 2011-03-23 | 2017-01-24 | Covidien Lp | Surgical access assembly with adapter |
| CN102247182A (zh) | 2011-04-29 | 2011-11-23 | 常州市康迪医用吻合器有限公司 | 外科用电动吻合器 |
| US9259277B2 (en) | 2011-05-13 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Instrument actuation interface |
| JP6309447B2 (ja) | 2011-05-31 | 2018-04-11 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | ロボットによる手術用器具のエンドエフェクタの積極的な制御 |
| US8870912B2 (en) | 2011-05-31 | 2014-10-28 | Intuitive Surgical Operations, Inc. | Surgical instrument with single drive input for two end effector mechanisms |
| US9017314B2 (en) | 2011-06-01 | 2015-04-28 | Covidien Lp | Surgical articulation assembly |
| US9381010B2 (en) | 2011-06-27 | 2016-07-05 | Covidien Lp | Surgical instrument with adapter for facilitating multi-direction end effector articulation |
| JP5931497B2 (ja) * | 2011-08-04 | 2016-06-08 | オリンパス株式会社 | 手術支援装置およびその組立方法 |
| EP2574368B1 (fr) | 2011-09-30 | 2014-12-24 | Sorin CRM SAS | Sonde de stimulation épicardique multizone |
| DE102011084499A1 (de) | 2011-10-14 | 2013-04-18 | Robert Bosch Gmbh | Werkzeugvorsatz |
| CN107693121B (zh) | 2011-10-21 | 2021-12-31 | 直观外科手术操作公司 | 用于机器人外科手术器械末端执行器的夹持力控制 |
| US9480492B2 (en) | 2011-10-25 | 2016-11-01 | Covidien Lp | Apparatus for endoscopic procedures |
| US8899462B2 (en) | 2011-10-25 | 2014-12-02 | Covidien Lp | Apparatus for endoscopic procedures |
| US9492146B2 (en) | 2011-10-25 | 2016-11-15 | Covidien Lp | Apparatus for endoscopic procedures |
| US8672206B2 (en) | 2011-10-25 | 2014-03-18 | Covidien Lp | Apparatus for endoscopic procedures |
| US8657177B2 (en) | 2011-10-25 | 2014-02-25 | Covidien Lp | Surgical apparatus and method for endoscopic surgery |
| WO2013063522A2 (en) | 2011-10-26 | 2013-05-02 | Reid Robert Cyrus | Surgical instrument motor pack latch |
| EP2774380B1 (en) | 2011-11-02 | 2019-05-22 | Intuitive Surgical Operations, Inc. | Method and system for stereo gaze tracking |
| US8968312B2 (en) | 2011-11-16 | 2015-03-03 | Covidien Lp | Surgical device with powered articulation wrist rotation |
| WO2013075204A1 (en) * | 2011-11-25 | 2013-05-30 | Titan Medical Inc. | Apparatus and systems for driving a robotic instrument |
| US9113899B2 (en) | 2011-11-29 | 2015-08-25 | Covidien Lp | Coupling mechanisms for surgical instruments |
| US9402555B2 (en) * | 2011-12-29 | 2016-08-02 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Drive assembly for use in a robotic control and guidance system |
| US9168042B2 (en) | 2012-01-12 | 2015-10-27 | Covidien Lp | Circular stapling instruments |
| US9241757B2 (en) | 2012-01-13 | 2016-01-26 | Covidien Lp | System and method for performing surgical procedures with a reusable instrument module |
| FR2987734B1 (fr) | 2012-03-08 | 2014-04-11 | Univ Strasbourg | Dispositif d'instrumentation motorise et modulable et systeme d'endoscope comprenant un tel dispositif |
| US9144456B2 (en) | 2012-04-09 | 2015-09-29 | Intuitive Surgical Operations, Inc. | Surgical instrument control |
| DE102012207707A1 (de) | 2012-05-09 | 2013-11-28 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Minimalinvasives Instrument für die robotische Chirurgie |
| AU2013203675B2 (en) | 2012-05-31 | 2014-11-27 | Covidien Lp | Hand held surgical handle assembly, surgical adapters for use between surgical handle assembly and surgical end effectors, and methods of use |
| US9597104B2 (en) | 2012-06-01 | 2017-03-21 | Covidien Lp | Handheld surgical handle assembly, surgical adapters for use between surgical handle assembly and surgical end effectors, and methods of use |
| US10080563B2 (en) | 2012-06-01 | 2018-09-25 | Covidien Lp | Loading unit detection assembly and surgical device for use therewith |
| US9868198B2 (en) | 2012-06-01 | 2018-01-16 | Covidien Lp | Hand held surgical handle assembly, surgical adapters for use between surgical handle assembly and surgical loading units, and methods of use |
| US9364220B2 (en) | 2012-06-19 | 2016-06-14 | Covidien Lp | Apparatus for endoscopic procedures |
| JP5739842B2 (ja) * | 2012-06-22 | 2015-06-24 | 日産自動車株式会社 | 車両の駆動装置 |
| US9226751B2 (en) * | 2012-06-28 | 2016-01-05 | Ethicon Endo-Surgery, Inc. | Surgical instrument system including replaceable end effectors |
| US20140005640A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Surgical end effector jaw and electrode configurations |
| US9101385B2 (en) * | 2012-06-28 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Electrode connections for rotary driven surgical tools |
| EP2869779B1 (de) * | 2012-07-03 | 2019-02-27 | KUKA Deutschland GmbH | Chirurgische instrumentenanordnung |
| US10492814B2 (en) | 2012-07-09 | 2019-12-03 | Covidien Lp | Apparatus for endoscopic procedures |
| US9839480B2 (en) | 2012-07-09 | 2017-12-12 | Covidien Lp | Surgical adapter assemblies for use between surgical handle assembly and surgical end effectors |
| US9402604B2 (en) | 2012-07-20 | 2016-08-02 | Covidien Lp | Apparatus for endoscopic procedures |
| KR101364053B1 (ko) * | 2012-08-03 | 2014-02-19 | 한국과학기술연구원 | 미세수술기구용 가이드 튜브 |
| US9452020B2 (en) | 2012-08-15 | 2016-09-27 | Intuitive Surgical Operations, Inc. | User initiated break-away clutching of a surgical mounting platform |
| KR102147826B1 (ko) | 2012-08-15 | 2020-10-14 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 로봇 암의 수동식 운동에 의해 제어되는 이동가능한 수술용 장착 플랫폼 |
| JP6385935B2 (ja) | 2012-09-17 | 2018-09-05 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 入力装置を遠隔操作手術器具機能に割り当てるための方法及びシステム |
| US9421014B2 (en) | 2012-10-18 | 2016-08-23 | Covidien Lp | Loading unit velocity and position feedback |
| EP3932628A1 (en) | 2012-12-10 | 2022-01-05 | Intuitive Surgical Operations, Inc. | Collision avoidance during controlled movement of image capturing device and manipulatable device movable arms |
| JP6297060B2 (ja) | 2012-12-31 | 2018-03-20 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 強化されたナイフクリアランスを備える外科用ステープルカートリッジ |
| US10828019B2 (en) | 2013-01-18 | 2020-11-10 | W.L. Gore & Associates, Inc. | Sealing device and delivery system |
| US9782187B2 (en) | 2013-01-18 | 2017-10-10 | Covidien Lp | Adapter load button lockout |
| US10918364B2 (en) | 2013-01-24 | 2021-02-16 | Covidien Lp | Intelligent adapter assembly for use with an electromechanical surgical system |
| KR102264615B1 (ko) | 2013-02-15 | 2021-06-14 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 로봇 시스템의 노드들을 동기화시키기 위한 시스템 및 방법 |
| US10507066B2 (en) | 2013-02-15 | 2019-12-17 | Intuitive Surgical Operations, Inc. | Providing information of tools by filtering image areas adjacent to or on displayed images of the tools |
| US9216013B2 (en) | 2013-02-18 | 2015-12-22 | Covidien Lp | Apparatus for endoscopic procedures |
| US9421003B2 (en) | 2013-02-18 | 2016-08-23 | Covidien Lp | Apparatus for endoscopic procedures |
| US9398911B2 (en) * | 2013-03-01 | 2016-07-26 | Ethicon Endo-Surgery, Llc | Rotary powered surgical instruments with multiple degrees of freedom |
| BR112015021141B1 (pt) | 2013-03-01 | 2021-12-28 | Ethicon Endo-Surgery, Inc | Junta de articulação para um instrumento cirúrgico |
| US9839481B2 (en) * | 2013-03-07 | 2017-12-12 | Intuitive Surgical Operations, Inc. | Hybrid manual and robotic interventional instruments and methods of use |
| US9492189B2 (en) | 2013-03-13 | 2016-11-15 | Covidien Lp | Apparatus for endoscopic procedures |
| US9220569B2 (en) * | 2013-03-13 | 2015-12-29 | Ethicon Endo-Surgery, Inc. | Electrosurgical device with disposable shaft having translating gear and snap fit |
| AU2014236718B2 (en) | 2013-03-14 | 2018-07-05 | Sri International | Compact robotic wrist |
| EP2968048B1 (en) | 2013-03-15 | 2018-06-06 | Intuitive Surgical Operations, Inc. | Surgical patient side cart with steering interface |
| KR102380980B1 (ko) * | 2013-03-15 | 2022-04-01 | 스트리커 코포레이션 | 수술 로봇 조작기의 엔드 이펙터 |
| US9948852B2 (en) | 2013-03-15 | 2018-04-17 | Intuitive Surgical Operations, Inc. | Intelligent manual adjustment of an image control element |
| US9775610B2 (en) | 2013-04-09 | 2017-10-03 | Covidien Lp | Apparatus for endoscopic procedures |
| US9700318B2 (en) | 2013-04-09 | 2017-07-11 | Covidien Lp | Apparatus for endoscopic procedures |
| US9801626B2 (en) | 2013-04-16 | 2017-10-31 | Ethicon Llc | Modular motor driven surgical instruments with alignment features for aligning rotary drive shafts with surgical end effector shafts |
| CN105208963B (zh) | 2013-05-15 | 2018-12-04 | 直观外科手术操作公司 | 具有悬挂系统的外科手术患者侧推车 |
| JP6416886B2 (ja) | 2013-05-15 | 2018-10-31 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 遠隔操作手術システムのための力伝達機構 |
| US9801646B2 (en) | 2013-05-30 | 2017-10-31 | Covidien Lp | Adapter load button decoupled from loading unit sensor |
| US9797486B2 (en) | 2013-06-20 | 2017-10-24 | Covidien Lp | Adapter direct drive with manual retraction, lockout and connection mechanisms |
| US8948434B2 (en) | 2013-06-24 | 2015-02-03 | Michael James Godfrey | Microphone |
| US9757129B2 (en) * | 2013-07-08 | 2017-09-12 | Covidien Lp | Coupling member configured for use with surgical devices |
| US9629633B2 (en) | 2013-07-09 | 2017-04-25 | Covidien Lp | Surgical device, surgical adapters for use between surgical handle assembly and surgical loading units, and methods of use |
| KR102463600B1 (ko) | 2013-08-09 | 2022-11-07 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 복수의 말단에 수용된 모터를 제어하기 위한 원격 전류 제어기를 갖는 의료 로봇 시스템 |
| WO2015023834A1 (en) | 2013-08-15 | 2015-02-19 | Intuitive Surgical Operations, Inc. | Instrument sterile adapter drive features |
| US9955966B2 (en) | 2013-09-17 | 2018-05-01 | Covidien Lp | Adapter direct drive with manual retraction, lockout, and connection mechanisms for improper use prevention |
| US10271840B2 (en) | 2013-09-18 | 2019-04-30 | Covidien Lp | Apparatus and method for differentiating between tissue and mechanical obstruction in a surgical instrument |
| US9446517B2 (en) | 2013-10-17 | 2016-09-20 | Intuitive Surgical Operations, Inc. | Fault reaction, fault isolation, and graceful degradation in a robotic system |
| US9974540B2 (en) | 2013-10-18 | 2018-05-22 | Covidien Lp | Adapter direct drive twist-lock retention mechanism |
| US9295522B2 (en) | 2013-11-08 | 2016-03-29 | Covidien Lp | Medical device adapter with wrist mechanism |
| US20150150574A1 (en) | 2013-12-04 | 2015-06-04 | Covidien Lp | Adapter direct drive push button retention mechanism |
| US10236616B2 (en) | 2013-12-04 | 2019-03-19 | Covidien Lp | Adapter assembly for interconnecting surgical devices and surgical attachments, and surgical systems thereof |
| US9918713B2 (en) | 2013-12-09 | 2018-03-20 | Covidien Lp | Adapter assembly for interconnecting electromechanical surgical devices and surgical loading units, and surgical systems thereof |
| EP3079608B8 (en) | 2013-12-11 | 2020-04-01 | Covidien LP | Wrist and jaw assemblies for robotic surgical systems |
| US9808245B2 (en) | 2013-12-13 | 2017-11-07 | Covidien Lp | Coupling assembly for interconnecting an adapter assembly and a surgical device, and surgical systems thereof |
| EP3084747B1 (en) | 2013-12-20 | 2022-12-14 | Intuitive Surgical Operations, Inc. | Simulator system for medical procedure training |
| US9687232B2 (en) * | 2013-12-23 | 2017-06-27 | Ethicon Llc | Surgical staples |
| US9839424B2 (en) | 2014-01-17 | 2017-12-12 | Covidien Lp | Electromechanical surgical assembly |
| EP3099265B1 (en) * | 2014-01-31 | 2021-09-15 | Covidien LP | Interfaces for surgical systems |
| CN106232049A (zh) | 2014-03-17 | 2016-12-14 | 直观外科手术操作公司 | 手术帷帘和包括手术帷帘和附接传感器的系统 |
| US9918800B2 (en) | 2014-03-17 | 2018-03-20 | Intuitive Surgical Operations, Inc. | Surgical system with obstacle indication system |
| JP6725424B2 (ja) | 2014-03-17 | 2020-07-15 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 遠隔操作医療システムのための誘導セットアップ |
| KR102364743B1 (ko) | 2014-03-17 | 2022-02-18 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 중간 과정 재시작 동안의 기기 제어 입력 위치/배향의 복구 |
| KR102252641B1 (ko) | 2014-03-17 | 2021-05-18 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 모드 전환 시의 진동을 감쇠시키기 위한 명령 성형 |
| JP2017516507A (ja) | 2014-03-17 | 2017-06-22 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | イメージング器具の向きの制御のためのシステム及び方法 |
| EP3753523B1 (en) | 2014-03-17 | 2024-05-01 | Intuitive Surgical Operations, Inc. | Wheeled cart with stabilization |
| US10130436B2 (en) | 2014-03-17 | 2018-11-20 | Intuitive Surgical Operations, Inc. | Automated structure with pre-established arm positions in a teleoperated medical system |
| US9839487B2 (en) | 2014-03-17 | 2017-12-12 | Intuitive Surgical Operations, Inc. | Backup latch release for surgical instrument |
| EP3119338B1 (en) | 2014-03-17 | 2020-05-06 | Intuitive Surgical Operations, Inc. | Automatic push-out to avoid range of motion limits |
| JP6644699B2 (ja) | 2014-03-19 | 2020-02-12 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 視線追跡を使用する医療装置、システム、及び方法 |
| US10164466B2 (en) | 2014-04-17 | 2018-12-25 | Covidien Lp | Non-contact surgical adapter electrical interface |
| US10080552B2 (en) | 2014-04-21 | 2018-09-25 | Covidien Lp | Adapter assembly with gimbal for interconnecting electromechanical surgical devices and surgical loading units, and surgical systems thereof |
| US9913643B2 (en) | 2014-05-09 | 2018-03-13 | Covidien Lp | Interlock assemblies for replaceable loading unit |
| US9713466B2 (en) | 2014-05-16 | 2017-07-25 | Covidien Lp | Adaptor for surgical instrument for converting rotary input to linear output |
| US20150374372A1 (en) | 2014-06-26 | 2015-12-31 | Covidien Lp | Hand held surgical handle assembly, surgical adapters for use between surgical handle assembly and surgical end effectors, and methods of use |
| US10561418B2 (en) | 2014-06-26 | 2020-02-18 | Covidien Lp | Adapter assemblies for interconnecting surgical loading units and handle assemblies |
| US9987095B2 (en) | 2014-06-26 | 2018-06-05 | Covidien Lp | Adapter assemblies for interconnecting electromechanical handle assemblies and surgical loading units |
| US9839425B2 (en) | 2014-06-26 | 2017-12-12 | Covidien Lp | Adapter assembly for interconnecting electromechanical surgical devices and surgical loading units, and surgical systems thereof |
| US10163589B2 (en) | 2014-06-26 | 2018-12-25 | Covidien Lp | Adapter assemblies for interconnecting surgical loading units and handle assemblies |
| US9763661B2 (en) | 2014-06-26 | 2017-09-19 | Covidien Lp | Adapter assembly for interconnecting electromechanical surgical devices and surgical loading units, and surgical systems thereof |
| KR20240134217A (ko) * | 2014-08-15 | 2024-09-06 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 가변 엔트리 가이드 구성을 가진 수술 시스템 |
| CN107072722B (zh) | 2014-09-15 | 2020-05-12 | 柯惠Lp公司 | 机器人控制手术组件 |
| EP3196685B1 (en) | 2014-09-19 | 2024-08-28 | Sony Group Corporation | Medical observation apparatus and lens barrel for medical observation apparatus |
| EP3202362A4 (en) | 2014-09-30 | 2018-06-27 | Riverfield Inc. | Adapter component |
| US10226254B2 (en) | 2014-10-21 | 2019-03-12 | Covidien Lp | Adapter, extension, and connector assemblies for surgical devices |
| US10085750B2 (en) | 2014-10-22 | 2018-10-02 | Covidien Lp | Adapter with fire rod J-hook lockout |
| US9949737B2 (en) | 2014-10-22 | 2018-04-24 | Covidien Lp | Adapter assemblies for interconnecting surgical loading units and handle assemblies |
| US10610314B2 (en) * | 2014-10-23 | 2020-04-07 | Covidien Lp | Drive unit and rack drape for robotic surgical instruments |
| EP3232973B1 (en) * | 2014-12-19 | 2020-04-01 | DistalMotion SA | Sterile interface for articulated surgical instruments |
| CN104605943B (zh) * | 2015-02-11 | 2017-01-18 | 中国科学院重庆绿色智能技术研究院 | 一种模块化手术器械驱动装置 |
| ES2897505T3 (es) * | 2015-03-10 | 2022-03-01 | Covidien Lp | Sistemas quirúrgicos robóticos, unidades de accionamiento de instrumentos, y conjuntos de accionamiento |
| EP3628264B1 (en) | 2015-03-17 | 2024-10-16 | Intuitive Surgical Operations, Inc. | Systems and methods for rendering onscreen identification of instruments in a teleoperational medical system |
| US10033308B2 (en) | 2015-03-17 | 2018-07-24 | Intuitive Surgical Operations, Inc. | Systems and methods for motor torque compensation |
| KR102512881B1 (ko) | 2015-06-10 | 2023-03-23 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 오정렬되었을 때의 마스터 대 슬레이브 배향 매핑 |
| WO2016201313A1 (en) | 2015-06-11 | 2016-12-15 | Intuitive Surgical Operations, Inc. | Systems and methods for instrument engagement |
| WO2016205288A1 (en) | 2015-06-19 | 2016-12-22 | Covidien Lp | Robotic surgical assemblies |
| CN108472084B (zh) | 2015-11-12 | 2021-08-27 | 直观外科手术操作公司 | 具有训练或辅助功能的外科手术系统 |
| US10898189B2 (en) | 2015-11-13 | 2021-01-26 | Intuitive Surgical Operations, Inc. | Push-pull stapler with two degree of freedom wrist |
| US9949798B2 (en) | 2016-01-06 | 2018-04-24 | Ethicon Endo-Surgery, Llc | Methods, systems, and devices for controlling movement of a robotic surgical system |
| CN108697474B (zh) | 2016-02-16 | 2021-10-22 | 柯惠Lp公司 | 机器人手术组件及其手术器械保持器 |
-
2017
- 2017-05-23 AU AU2017269271A patent/AU2017269271B2/en not_active Ceased
- 2017-05-23 AU AU2017269262A patent/AU2017269262B2/en active Active
- 2017-05-23 JP JP2018561587A patent/JP7037505B2/ja active Active
- 2017-05-23 CA CA3022071A patent/CA3022071A1/en active Pending
- 2017-05-23 CA CA3022154A patent/CA3022154A1/en active Pending
- 2017-05-23 CA CA3022156A patent/CA3022156A1/en active Pending
- 2017-05-23 JP JP2018561598A patent/JP6924777B2/ja active Active
- 2017-05-23 US US16/303,874 patent/US11547508B2/en active Active
- 2017-05-23 CN CN201780030972.7A patent/CN109219414B/zh active Active
- 2017-05-23 US US16/303,885 patent/US11406465B2/en active Active
- 2017-05-23 AU AU2017272085A patent/AU2017272085B2/en not_active Ceased
- 2017-05-23 WO PCT/US2017/033903 patent/WO2017205311A1/en unknown
- 2017-05-23 JP JP2018561601A patent/JP6911056B2/ja active Active
- 2017-05-23 AU AU2017269261A patent/AU2017269261B2/en not_active Ceased
- 2017-05-23 JP JP2018561599A patent/JP7021114B2/ja active Active
- 2017-05-23 US US16/303,862 patent/US11284956B2/en active Active
- 2017-05-23 US US16/303,838 patent/US11129685B2/en active Active
- 2017-05-23 EP EP17803381.7A patent/EP3463143A4/en active Pending
- 2017-05-23 JP JP2018561604A patent/JP6924778B2/ja active Active
- 2017-05-23 CN CN201780028941.8A patent/CN109152617B/zh active Active
- 2017-05-23 US US16/303,926 patent/US11179211B2/en active Active
- 2017-05-23 WO PCT/US2017/033935 patent/WO2017205333A1/en unknown
- 2017-05-23 WO PCT/US2017/033926 patent/WO2017205326A1/en unknown
- 2017-05-23 CN CN201780031985.6A patent/CN109152609B/zh active Active
- 2017-05-23 CN CN201780002103.3A patent/CN107735041B/zh active Active
- 2017-05-23 CA CA3022145A patent/CA3022145A1/en not_active Abandoned
- 2017-05-23 EP EP17803397.3A patent/EP3463157A4/en active Pending
- 2017-05-23 EP EP17803384.1A patent/EP3463167A4/en active Pending
- 2017-05-23 EP EP17803394.0A patent/EP3463168A4/en active Pending
- 2017-05-23 WO PCT/US2017/033899 patent/WO2017205308A1/en unknown
- 2017-05-23 CA CA3022164A patent/CA3022164A1/en active Pending
- 2017-05-23 CN CN201780028940.3A patent/CN109152611B/zh active Active
- 2017-05-23 US US16/303,968 patent/US11607284B2/en active Active
- 2017-05-23 EP EP17803392.4A patent/EP3463146A4/en active Pending
- 2017-05-23 JP JP2018561600A patent/JP6945560B2/ja active Active
- 2017-05-23 CA CA3022149A patent/CA3022149A1/en active Pending
- 2017-05-23 WO PCT/US2017/033905 patent/WO2017205313A1/en unknown
- 2017-05-23 CN CN201780028942.2A patent/CN109195540B/zh active Active
- 2017-05-23 AU AU2017272081A patent/AU2017272081B2/en active Active
- 2017-05-23 WO PCT/US2017/033902 patent/WO2017205310A1/en unknown
- 2017-05-23 CA CA3022160A patent/CA3022160A1/en active Pending
- 2017-05-23 EP EP17803386.6A patent/EP3463145A4/en active Pending
- 2017-05-23 CN CN201780028873.5A patent/CN109152608B/zh active Active
- 2017-05-23 EP EP17803383.3A patent/EP3463144A4/en active Pending
- 2017-05-23 AU AU2017272075A patent/AU2017272075B2/en not_active Ceased
- 2017-05-23 JP JP2018561605A patent/JP6959944B2/ja active Active
- 2017-05-23 AU AU2017272072A patent/AU2017272072B2/en not_active Ceased
- 2017-05-23 US US16/303,904 patent/US11191600B2/en active Active
- 2017-05-23 WO PCT/US2017/033931 patent/WO2017205329A1/en unknown
-
2021
- 2021-05-04 AU AU2021202809A patent/AU2021202809B2/en active Active
- 2021-06-10 AU AU2021203843A patent/AU2021203843A1/en not_active Abandoned
- 2021-12-16 JP JP2021204116A patent/JP2022027943A/ja not_active Withdrawn
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8998799B2 (en) * | 1996-12-12 | 2015-04-07 | Intuitive Surgical Operations, Inc. | Sterile surgical adaptor |
| WO2011037394A3 (ko) * | 2009-09-23 | 2011-08-25 | 주식회사 이턴 | 멸균 어댑터, 휠의 체결 구조 및 수술용 인스트루먼트의 체결 구조 |
| CN104605936A (zh) * | 2012-04-27 | 2015-05-13 | 库卡实验仪器有限公司 | 机器人手术系统 |
| CN105476677A (zh) * | 2014-10-07 | 2016-04-13 | 柯惠Lp公司 | 手持式机电手术系统 |
| CN104783845A (zh) * | 2015-01-22 | 2015-07-22 | 天津手智医疗科技有限责任公司 | 微创手术智能化器械 |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109219414B (zh) | 机器人手术组合件 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |