CN107302847B - 用于工业设备的无线功率传输和通信 - Google Patents
用于工业设备的无线功率传输和通信 Download PDFInfo
- Publication number
- CN107302847B CN107302847B CN201580075867.6A CN201580075867A CN107302847B CN 107302847 B CN107302847 B CN 107302847B CN 201580075867 A CN201580075867 A CN 201580075867A CN 107302847 B CN107302847 B CN 107302847B
- Authority
- CN
- China
- Prior art keywords
- power
- wpc
- receiver
- transmitter
- housing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004891 communication Methods 0.000 title description 39
- 230000005540 biological transmission Effects 0.000 claims abstract description 20
- 230000006698 induction Effects 0.000 claims description 9
- 230000001939 inductive effect Effects 0.000 abstract description 39
- 238000000034 method Methods 0.000 abstract description 4
- 239000012530 fluid Substances 0.000 description 29
- 230000006870 function Effects 0.000 description 28
- 238000007726 management method Methods 0.000 description 17
- 230000033001 locomotion Effects 0.000 description 8
- 230000007246 mechanism Effects 0.000 description 7
- 230000000712 assembly Effects 0.000 description 4
- 238000000429 assembly Methods 0.000 description 4
- 230000002452 interceptive effect Effects 0.000 description 4
- 238000000926 separation method Methods 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 230000001276 controlling effect Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000001105 regulatory effect Effects 0.000 description 3
- 230000011664 signaling Effects 0.000 description 3
- 230000002457 bidirectional effect Effects 0.000 description 2
- 230000000670 limiting effect Effects 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 230000002829 reductive effect Effects 0.000 description 2
- 229920000049 Carbon (fiber) Polymers 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 239000004917 carbon fiber Substances 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000007797 corrosion Effects 0.000 description 1
- 238000005260 corrosion Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 230000002401 inhibitory effect Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000005007 materials handling Methods 0.000 description 1
- VNWKTOKETHGBQD-UHFFFAOYSA-N methane Chemical compound C VNWKTOKETHGBQD-UHFFFAOYSA-N 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000004806 packaging method and process Methods 0.000 description 1
- 230000000644 propagated effect Effects 0.000 description 1
- 230000001902 propagating effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
- 230000003442 weekly effect Effects 0.000 description 1
Images
















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/12—Platforms; Forks; Other load supporting or gripping members
- B66F9/18—Load gripping or retaining means
- B66F9/183—Coplanar side clamps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/12—Platforms; Forks; Other load supporting or gripping members
- B66F9/18—Load gripping or retaining means
- B66F9/184—Roll clamps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/20—Means for actuating or controlling masts, platforms, or forks
- B66F9/205—Arrangements for transmitting pneumatic, hydraulic or electric power to movable parts or devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/20—Means for actuating or controlling masts, platforms, or forks
- B66F9/22—Hydraulic devices or systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/20—Means for actuating or controlling masts, platforms, or forks
- B66F9/24—Electrical devices or systems
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/10—Circuit arrangements or systems for wireless supply or distribution of electric power using inductive coupling
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/80—Circuit arrangements or systems for wireless supply or distribution of electric power involving the exchange of data, concerning supply or distribution of electric power, between transmitting devices and receiving devices
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/90—Circuit arrangements or systems for wireless supply or distribution of electric power involving detection or optimisation of position, e.g. alignment
-
- H04B5/79—
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/00032—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries characterised by data exchange
- H02J7/00034—Charger exchanging data with an electronic device, i.e. telephone, whose internal battery is under charge
-
- H04B5/24—
-
- H04B5/72—
Abstract
本发明涉及用于无线发射功率和/或数据的方法和系统,使用包括感应功率发射器(118)和感应功率接收器(120)的感应功率传输单元(110)。优选地,感应功率发射器(118)能够从电源接收功率并将其无线地和感应地发射到感应功率接收器(120),感应功率接收器(120)又向功率消耗设备(158)输送功率。更优选地,感应功率接收器即使在没有从无线功率发射器接收感应功率时也能够向功率消耗设备(158)输送功率。
Description
技术领域
本公开涉及工业设备,该工业设备包括可选择性地相互连接的不同单元以共同执行期望活动。更具体地,本公开涉及这样的工业设备,即在该工业设备中在这种不同单元之间必须传输通信信号和/或功率以便执行该期望活动。
背景技术
在前面段落中所提及的该设备的一个例子是可以选择性地附接到负载搬运机的升降车滑车,以将货物例如包装箱、纸卷等从一个地方提升和移动到另一个地方。通常,负载搬运机将包括负载接合构件,例如抬起托盘的叉,抓住纸卷的夹等,其中负载接合构件的定位以及负载的移动通过液压地使用从升降车上的储存器供应的流体来实现。在升降车和负载搬运机之间的加压流体的运动通常发生在液压管线中,该液压管线在升降车的杆上延伸到负载搬运机。
许多类型的负载搬运机具有多个、独立可控的流体功率功能。这些功能中的大多数需要双向、可逆的致动。这种负载搬运机的例子包括侧移叉定位件、侧移式推拉附件、具有平行滑动夹紧臂或枢转夹紧臂的侧移和/或旋转负载夹具以及其它类型的流体功率致动的多功能负载搬运机。通常,前述类型的负载搬运机安装在负载滑车上,该负载滑车在工业升降车的杆上被选择性地升高和降低。升降车操作员舱中的多个流体控制阀可以单独调节负载搬运机的多个流体功率功能中的每个。在这种情况下,四个甚至六个液压管路必须在升降车和负载搬运机之间进行通信,以操作多个双向功能。为了避免在升降车的杆上延伸的多于两个液压管路的必要性,长期以来一直常见的是在操作员舱中仅提供单个控制阀,该控制阀连接到在升降车和多功能负载搬运机之间延伸的一对液压管线。
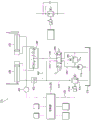
例如,图1和图2示出了附接到辊夹12、用于夹紧和松开诸如大纸卷的圆柱形物体的的升降车10,使用由液压缸16和17致动的可旋转的枢转臂14。尽管图1仅示出一个缸16和一个缸17,辊夹12可以包括两个缸16和两个缸17,其中未示出的缸位于所示的缸16和17的后面。夹14的旋转通过旋转器18实现,该旋转器18响应于双向液压马达20而围绕纵向轴线双向旋转夹具。当夹具12包括单独的缸16和17时,夹臂14可以被独立地致动,一些辊夹具仅具有一对缸16以致动夹臂14中的一个,而不由缸16致动的夹臂14是固定的。
如图2所示,来自储存器24的液压流体经由在升降车10的杆22上延伸的两个液压管线26和27在升降车10和卷筒夹具12之间更换。升降车10上的手柄28允许操作者通过缸16和17的致动来交替地打开或关闭夹紧臂14,并且还允许操作者通过旋转马达30以顺时针或逆时针方向选择一个来旋转夹具14。开关32位于手柄28上用于确定由手柄28控制哪个功能(旋转或夹紧)。开关32被集成到无线发射器34中,该无线发射器34与无线接收器36通信,该无线接收器36具有在辊夹12中的对应的开关38。因此,例如,操作者可以无线地使开关38在打开位置和关闭位置之间操作弹簧偏置的电磁阀40。本领域技术人员应当理解,除了打开和关闭夹具之外,还可以进行许多其他操作,例如升高或降低滑车,侧移或滚动滑车,以及升降车中常见的许多其他功能。
在打开位置(如图2所示)中,加压流体从升降车10中的储存器24被引导通过管线26,27并且在杆22之上,取决于手柄28的位置,即通过确定通过线路26,27的流动的方向,来在两个的旋转方向中的任一个上操作马达30。相反,当操作者使用开关32无线地启动电磁阀40时,来自储存器24的流体流动通过先导管线42,使选择控制阀44将流体从转子马达20重导向到夹紧缸16和17,如图2所示。在这种构造中,手柄28的操作将根据手柄28的位置,即通过确定通过管线26、27的流动方向来交替地地延伸或缩回缸16。如果包括第三液压功能,例如横向延伸的辊夹框架,将提供类似于阀40和44的组合的第二先导操作的阀组件用于横向控制,这使用类似于活塞和缸组件17的组件、以及第二发射器/接收器组,例如34和36以及第二操作者控制的电开关32。
位于远程附件上的液压致动电磁开关,例如图2中所示的阀40和44,需要较大的功率来操作-通常比通过无线电信号可行地传送更多的功率。在这种情况下,一个或多个电磁阀弧连接到附件,并且历史上由布设在升降车和附件之间的电线控制,在升降车的杆之上,使得操作者可以电力地选择哪个附接功能将由单对液压管线驱动。然而,杆通常包括彼此可滑动地接合以提供用于杆的伸缩式延伸部的刚性金属框架。设计具有这些电线的杆是复杂的任务,因为可能在移动框架和电线之间存在轴承,并且电线必须放置在滑动金属框架附近,而不会干扰杆的移动。即使使用最细心的设计,将电线在提升车上布设到可移动的附件也需要将电线及其连接器暴露在显着的危险、磨损和恶化之下,这导致断裂、短路、腐蚀和其它问题,这需要相对频繁的更换和停机。此外,升降车电气系统的范围从十二到九十伏,这需要用于电磁阀的各种专用线圈。
为了消除对在升降车的杆上延伸的电线的需要,一些附件已经配备有诸如电池的电源,以在附件上操作电磁阀或需要功率的其他装置。然而附件上的电池相当迅速地耗尽,需要更换和/或频繁充电。这可能变得相当繁重和/或效率低下,特别是在能量密集型应用中,其在每个附件上包含多个电池,其中每个电池需要每周更换或停机以进行充电。
此外,当至液压电磁阀或其他电子设备的电功率由附件上的电源提供,但由升降车上的操作人员控制时,必须使用一些器件向附件侧电气系统提供控制信号来操作附件的电气设备。通常,这在升降车上的发射器和附件上的接收器之间使用无线通信通道来进行,例如在美国专利3,647,255、3,768,367、3,892,079、4,381,872、4,526,413和6,662,881中所示的。尽管消除了升降车的杆上的电线的需要,无线发射器通常可以使升降车混杂,特别是当那些升降车将被串连到几种不同类型的附件上时,该几种不同类型的附件具有不同相应类型的电气部件,例如,电磁开关、传感器阵列、条码阅读器、激光器等。
因此,期望的是一种用于操作远程附件上的电气和/或机电设备的改进的系统和方法,例如升降车负载搬运机。
发明内容
在本公开的一个方面中,组件可以包括发射器单元和接收器单元。该发射器单元可优选地能够向该接收器单元发射无线电功率。该接收器单元可优选地具有第一接线输出,该第一接线输出能够连接至远离该发射器单元的功率消耗设备,从而当被连接时该功率消耗设备可以接收该无线电功率,并且其中当该接收器单元不从该发射器单元接收该无线电功率时,该第一接线输出能够向该功率消耗设备输送电功率。
在本公开的另一方面中,组件可以包括发射器单元和接收器单元。该发射器单元可优选地能够向该接收器单元发射无线电功率。该接收器单元可以具有第一接线输出和第二接线输出,该第一接线输出能够连接至远离该发射器单元的电池,该第二接线输出能够连接至远离该发射器单元的功率消耗设备,其中该第一接线输出能够使用该无线电功率的第一部分给该电池再充电,而该第二接线输出同时将该无线电功率的第二部分输送至该功率消耗设备。
在本公开的另一方面中,组件可以包括壳体、用于接线电功率的输入和能够输送电功率的输出终端,该壳体容纳能够接收无线电功率的感应线圈。该组件还可以优选地包括执行功率管理系统的电路,该电路将输出功率布线至该输出终端,该输出功率包括自动选择的、该接线电功率和该无线电功率的组合。
附图说明
为了更好地理解本发明,并且为了示出如何实施本发明,现在将通过举例的方式参考附图,其中:
图1示出了连接到辊夹的工业升降车。
图2示出了用于操作图1的辊夹的电气和液压回路。
图3示出了升降车的一部分,其具有安装的无线功率和通信(WPC)发射器和接收器,一起能够在它们之间无线地通信功率和/或数据信号。
图4示出了WPC发射器和接收器的结构的分解图。
图5示出了电源、电源开关和WPC发射器与接收器之间的通信通道的电气原理图。
图6示出了WPC接收器的电气原理图。
图7示出了作为横向未对准和分离距离的函数的WPC单元之间的感应功率传输。
图8示出了WPC发射器和WPC接收器之间的替代RF通信线路,其能够在两个RF通信通道上发送任意数量的RF信号。
图9A-9C示出通过一机构安装到滑车的WPC接收器,其改善了从WPC发射器的时间平均功率传输。
图10示出了使用WPC发射器和接收器操作的、连接至侧移叉定位件的升降车。
图11示出了图9的侧移叉定位件的电路图。
图12示意性地示出了系统,该系统包括附接到诸如箱夹附件的附件的升降车,其使用WPC发射器和接收器操作,以将数据从附件传送到升降车,并且由升降车使用来控制附件。
图13和14示出了可用于图12的系统的箱夹附件。
图15示出了图12的箱夹附件的电路图。
具体实施方式
如上所述,设计用于在工业车辆的附件上操作机电设备的控制系统是具有挑战性的,并且通常涉及平衡竞争的考虑,例如消除杆上的接线电连接,其随着时间的推移倾向于随着使用附件上的电池而退化,该电池不幸需要频繁的充电和/或更换。此外,使用安装到附件上的电池需要使用无线控制信号来在升降车和附件之间进行通信,这如前所述倾向于使升降车与发射器混杂,假设升降车将需要通信大数量类型的控制信号,由于随着时间的推移许多不同类型的附件被附接到升降车上,每个附件有其自己独特的一套功能。这可能会成为问题,由于升降车可能不会有大量的空间用于过多的发射器,特别是假设升降车需要在工业环境中的许多障碍物之间和周围移动,并且将许多发射器定位在升降车外部会增加由于与其他物体碰撞而损坏发射器的可能性。
参考图3,新颖的多功能无线功率和通信(WPC)单元110能够在主车辆112和附件(未示出)之间无线传递功率,该附件安装到可沿主车辆的杆116竖直滑动的滑车114。主车辆可以是例如工业升降车,或者可以替代地是工程车辆或可以选择性地附接和拆卸附件的任何其他类型的可移动工业设备。虽然WPC单元110的所公开的特征将在整个本说明书中通过参考工业升降车和升降车附件之间的示例性相互作用来说明,但是本领域技术人员将理解,WPC单元110容易适于在许多其它应用中使用,例如建筑、材料处理,机器人等。还应当理解,虽然图3示出了安装到主车辆112的WPC功率发射器118和WPC接收器120,在适于应用和/或设计的情况下,其它实施例可以将WPC功率发射器选择性地安装到主车辆112上,同时将WPC功率接收器120安装到附件上。
WPC单元110的第一功能是将功率从主车辆112上的电源无线地传输到附件上,该附件通过主车辆112的滑车114或其他结构构件被可移动地安装到主车辆112上。例如,WPC单元110可以包括WPC功率发射器118,该WPC功率发射器118刚性地安装到主车辆112上并且能够将功率感应地传输到安装到主车辆的滑车114上的WPC功率接收器120。术语功率的“感应传输”是指在不相互接触的两个物体之间通过感应传输功率。优选地,由WPC功率接收器120接收的功率可以用于直接对附件上的机电功能供能。在其他实施例中,由WPC功率接收器120接收的功率可以用于直接对附件上的机电功能供能并对附件上的电池进行再充电,使得电池可以用于在当从WPC功率发射器118接收的功率不足以完全操作附件时的时间间隔期间还对附件上的机电功能供能。例如,从图3中可以看出,当滑车114相对于主车辆竖直滑动时,WPC功率发射器118和WPC功率接收器120可能不总是对准来用于感应功率传输。在使用其他主车辆和/或附件的其它实施方式中,WPC功率发射器118和WPC功率接收器120可能由于旋转面板、负载传输表面或水平移动面(例如负载推拉附件)而失去对准。
在这些后面的实施例中,在某些情况下,电池可用于在必要时增加或替换由WPC功率接收器120接收的功率,以在附件上操作机电或电气装置。在其他情况下,WPC单元110可以用于为附件上的电池再充电,这进而可以为附件上的所有电气和机电装置供能。在一些实施例中,位于WPC功率接收器120内的或其它一些位置的功率管理控制器用于提供(1)仅从WPC功率发射器118;(2)仅从附件上的电池;和(3)从WPC功率发射器118和附件上的电池;至附件装置的无缝切换供能,以及当来自WPC功率发射器118的全部功率不需要直接给附件上的装置供能时,使用来自WPC功率发射器118的功率对附件上的电池再充电。
WPC单元110的第二功能是在主车辆112和附件之间传输RF输入/输出(RF/IO)信号。RF/IO通信通道允许主车辆112和附件之间的非接触双向信令和/或电源切换,并且因此不仅可以用于发信号或使传感器或开关的状态发生变化而且可以用作输出,也可以优选地用于直接向诸如螺线管、继电器、灯、喇叭或其他装置的响应装置供能。优选地,RF/IO通道在WPC单元110的电路内提供。例如,WPC功率发射器118可以经由WPC功率接收器120将切换控制信号通信给附件,其进而通信这些信号以提供给附件上的各个电磁开关/阀。作为另一示例,WPC功率接收器120可以将来自附件的RF/IO信号通信到WPC功率发射器118,WPC功率发射器118进而将这些信号中继到主车辆112。从附件返回到主车辆的这种信号可能是有用的,例如,当操作完成或附件处于正确位置时,通过打开指示器或为螺线管供能用于功能控制来警告操作者。WPC单元110可以在主车辆112和附件之间在每个方向上提供任何期望数量的RF/IO通道。在优选实施例中,WPC单元包括在功率发射器118和WPC功率接收器120之间的两个专用RF输入通道和两个专用RF输出通道。应当理解,在每个方向上,每个通道数量可以是根据需要改变的以适合应用。
WPC单元110的第三功能是在主车辆112和附件之间传送CAN总线(用于控制局域网)通信。CAN总线标准是一种基于双向消息的协议,设计成允许微控制器和装置在没有主机的情况下在车内相互通信。主车辆112和附件之间的CAN总线通信可以用于例如将条形码、传感器数据等从附件传送回主车辆112。作为另一示例,WPC功率接收器120可以将模拟信号从附件通信至WPC功率发射器118,其进而将这些信号中继到主车辆112或车载控制器。例如,当在附件侧采取基于传感器读数的适当的液压管路压力或液压流速时,从附件返回至主车辆的这种RF信号是有用的。
优选地,CAN总线通信通道在WPC功率发射器和WPC功率接收器之间具有不小于三十英尺的连续传输范围。CAN总线通信通道优选地允许选择性地传输用户指定的地址或一系列地址以优化性能。本领域普通技术人员将理解,代替CAN通信或者除了CAN通信之外,WPC单元110可以使用其他网络协议来。例如,根据将由WPC单元110控制的应用的复杂度,可以使用诸如蓝牙、以太网协议、HTTP、SMS等网络协议。
为了便于在主车辆110和附件之间传送功率信号、RF/IO信号和CAN总线信号,WPC功率发射器118和WPC功率接收器120中的每一个分别包括连接器124和126。例如,WPC功率发射器118优选地包括可连接到主车辆112上的电源的功率连接器124a、RF/IO连接器124b和CAN总线连接器124c。类似地,WPC功率接收器120优选地包括可连接到附件上的电池的电源连接器126a、RF 110连接器126b和CAN总线连接器126c。这些连接中的每一个将在本说明书后面进行讨论。
每个WPC功率发射器118和WPC功率接收器120优选地具有形状因素,该形状因素被设计成在主车辆110和/或附件的保护区域内保护每个。例如,如图3中可见,WPC单元110可以方便地定位在主车辆112的前轮122上方,并且在WPC单元不横向延伸超过车轮的位置处,以将损坏WPC单元110的可能性最小化,当主车辆112在狭窄范围内的物体之间和周围移动时,这是典型的工业环境(例如仓库,货物码头等)。在优选实施例中,WPC功率发射器118和WPC功率接收器120中的每一个通常为圆形横截面,有约145mm地直径、约37mm的宽度。应当理解,在其他实施例中,可以使用其他适当的几何形状和/或尺寸。
此外,WPC功率发射器118和WPC功率接收器120的尺寸以及它们在主车辆112或附件上的相应定位优选地不会很大地阻止由附件承载的负载,由附件承载的负载定位成靠近主车辆112的滑车114是可行的。特别地,当将附件上的货物承载至主车辆时,负载的前后重量分布是附件可以安全承载多少重量而不会使本车辆112失去平衡的限制因素。因此,如图3所示,将WPC功率发射器118和WPC功率接收器120两者定位在主车辆的滑车后面有利地不会降低附件的承载能力,这否则是如果WPC功率接收器例如被定位在滑车14上或前面,或者在附件上的情况。
图4大体示出了每个WPC功率发射器118和WPC功率接收器120的结构,每个包括壳体130和盖132。壳体和盖中的每一个可以由任何适当的材料制成,例如碳纤维或其它不影响WPC功率发射器118和WPC功率接收器120之间的感应传输的硬塑料。嵌套在壳体130内的是线圈导线134,其在承载电流时提供电感。在一个优选实施例中,如图4所示,导线134以单个螺旋卷绕。如果需要,替代实施例可以将线卷绕多个螺旋线。在另外的其它实施例中,特别是在WPC单元110不是圆形横截面的情况下,导线134可以以不同几何形状的螺旋卷绕,例如正方形,六边形等。
通过塑料分隔件142与线圈导线134分开的是电路板136,其包括用于在WPC功率发射器118和WPC功率接收器120之间通信RF/IO信号的电路138,以及用于通信CAN总线信号和实施在本说明书后面更详细描述的功率管理模块150的电路。应当理解,图4仅示意性地示出了相应的CAN电路140、RF/IO电路138和功率管理模块150,并且特定电路可以被集成在一起并共享部件。
相应地,图5更详细地示出了WPC功率发射器118和WPC功率接收器120的RF/IO连接124b和126b的配置。特别地,WPC功率发射器118上的RF/IO连接124b包括12V连接器,用于连接到外部的车装载的负载或可以在车功率上操作的其他装置、用于从本地装置接收要发送到WPC功率接收器120的信号的两个RF输入、以及来自WPC功率接收器120处的信号输入的两个RF输出。在其他实施例中,可以提供更多的RF输入和/或输出。WPC功率接收器120的RF/IO连接126b进而包括用于连接到附件安装的装置的12V负载线、用于从本地装置接收要发送到WPC功率发射器118的信号的两个RF输入、以及来自WPC功率发射器118处的信号输入的两个RF输出。在其它实施例中,可以提供更多的RF输入和/或输出。CAN总线连接124c和126c中的每一个包括CAN高和低连接。WPC发射器118的电源连接124a包括12V+终端用于由主车辆10以及接地端子提供的功率,并且WPC接收器的电源连接126a包括至附件上的电池的正极和负极终端中的每一个的连接。
感应功率传输和功率管理
如前所述,WPC单元110包括WPC功率发射器118,WPC功率发射器118具有线圈134,该线圈134能够感应地(即无线地)向WPC功率接收器120上的类似线圈134传送功率。优选地,WPC单元110被设计成能够直接为主车辆112的附件上的装置供能,这意味着附件上的装置可以使用从主车辆112上的电池或其他电源接收的功率来操作,而不需要同时使用来自远程安装在附件上的电池的功率。然而,如图3所示,WPC功率发射器118和WPC功率接收器120可能不总是处于对准位置以在需要时提供足够的功率,或者附件上瞬时需要的功率可能会超过WPC功率发射器118和WPC功率接收器120之间的感应链路的功率传输能力。为了应对这种情况,在优选实施例中,至主车辆112的附件上的电池也能够提供足够的功率来操作附件上的装置。
图6示出了用于管理由WPC功率发射器118和一个或多个电池154提供的功率的WPC功率接收器120中的电路,以操作在附件上的装置的优选系统,以便无缝地切换(1)仅感应地从WPC功率发射器118供给;(2)仅从附件上的电池154供给;和(3)从WPC功率发射器118和电池154供给;至附件装置的供能,以及当来自WPC功率发射器118的功率不需要直接给附件上的装置供能时,使用来自WPC功率发射器118的感应功率对附件上的电池154再充电。
特别地,WPC功率接收器120的接收器侧电路板136可以优选地包括功率管理模块150,其可以由电路板136上到WPC功率接收器120中的线圈134的连接部152接收感应功率,并且还可以通过连接部126a(也在图3中示出)从至附件12上的电池154的连接部接收功率。至电池154的连接部和来自感应线圈134的连接部152两者被提供为至控制装置156的输入,该控制装置156向附件上的负载158输出功率,其可以例如包括传感器阵列、条形码读取器等。控制装置156还向GP输出通道164供能,GP输出通道164例如可以被连接到螺线管阵列、灯或其他装置。那些本领域普通技术人员将认识到,在一些实施例中,控制装置156可以被集成到功率管理模块150中。
在优选实施例中,从WPC功率发射器118向WPC功率接收器120提供的最大感应电流和功率分别为大约1安培和12瓦的功率。参考图7,提供的感应功率作为WPC功率发射器118和接收器120的相对表面之间的未对准的函数而减小。例如,在图3中所示的情况,其中WPC功率接收器相对于WPC功率发射器竖直滑动,感应功率传输逐渐减小到大约12mm的不对准(在竖直轴线上显示在y原点处的最大值),然后急剧下降。类似地,当WPC单元110安装在主车辆110和/或附件12上时,在操作期间,WPC功率接收器120横向移动远离WPC功率发射器118(例如,推拉附件),功率传输逐渐下降至约25mm分离,然后急剧下降。图7还示出了作为WPC单元110的感应表面之间的角度未对准的函数,感应功率是如何降低的,这可能例如利用翻转机应用时发生。
功率管理模块150优选仅从感应功率连接部152向负载158供能,除非负载158需要多于能从WPC功率发射器118所感应提供的功率,当例如WPC单元110的电感表面未对准或大于负载158所需的大约1安培或12W的功率。当发生这种情况时,功率管理模块无缝地从电池154提取额外的功率以满足负载158的要求。替换地,当负载的功率要求小于1安培和12W的功率,并且来自WPC功率发射器118的感应功率大于满足负载118所需的功率需求时,则使用多余功率来对附件上的电池154进行再充电。
CAN总线通信
如图6所示,WPC功率接收器120上的电路板136包括CAN模块160,如WPC功率发送器118上的电路板136(未示出),并且分别由CAN连接器126c和124c连接。CAN总线标准是一种基于双向消息的协议,设计成允许微控制器和装置在没有主机的情况下在车内相互通信。CAN是用于连接也称为节点的电子控制单元[ECU]的多主串行总线标准,其可以是位于主车辆112或附件上的诸如传感器、致动器和控制装置的装置。CAN标准要求每个节点包括主机处理器,收发器和CAN控制器。优选地,WPC功率发射器118和WPC功率接收器120中的每一个上的电路板136包括电路,其允许CAN消息在WPC功率发射器118和WPC功率接收器120之间通过它们自身的CAN连接器124c和126c从连接到每个的ECU无缝地经过。用于主车辆和附件的相应的主处理器和CAN控制器可以本地存储在这些结构中的每一个上,WPC功率发射器118和接收器120中的每一个上的电路板136仅提供收发器功能。
主车辆112和附件之间的CAN总线通信可以用于例如在附件和主车辆112之间传输条形码、传感器数据等。优选地,CAN总线通信通道具有连续的WPC发射器和WPC电源接收器之间的传输范围不小于三十英尺。
在许多实施例中,CAN通信网络可以包括代表主车辆上和附件上的非常大数量的部件的状态信息的数据。该CAN通信中的大部分可能与本车辆112和附件之间的对于附件的液压控制所必需的通信信号无关,但通常将存在于WPC发送器118和WPC接收器120之间的通信通道中,占用带宽,并且潜在地干扰来往于附件和主车辆112的控制信号。因此,在优选实施例中,WPC单元110包括与附件的液压控制相关的CAN地址的列表,并且滤除源自不在列表上的地址的CAN通信,以优化性能。
RF输入/输出通信
仍然参考图6,WPC功率接收器120上的电路板136优选地包括两个RF输入162,以从功率接收器120电连接到的附件上的本地传感器、开关或类似装置接收数据。WPC功率接收器120上的电路板还优选地包括两个RF输出164,以从WPC功率发射器118接收RF数据。参照图5,RF输入162可以分别通过RF/IO连接器126b的端子2和5连接至选择性地可用RF数据源,用于至WPC功率发射器118通信,而RF输出164可以分别通过RF/IO连接器126b的端子3和4被连接到附件上的所需负载。
当RF输出164接收到来自WPC功率发射器118的信号以激活一个或多个螺线管时,例如,当适用时,功率管理模块通过端子3和/或4提供功率用于切换至螺线管的信号,并且还通过负载端子1从控制装置156提供功率,以按照切换信号的指示来致动螺线管。在优选实施例中,功率管理模块通过控制装置156以及使用感应功率连接部152和电池154被配置为向每个RF输出通道162提供每个通道最大为3安、最大总和为5安的总功率。本领域技术人员应当理解,根据所需的应用以及可从WPC单元110中的感应通道以及附件上的电池154得到的功率量,可以为每个通道和/或总体提供更多的功率。
本领域普通技术人员将会理解,图6示意性地示出了用于WPC功率接收器120的RF电路,类似的电路存在于WPC功率发射器118中。也就是说,WPC功率发射器118可以包括两个RF输入,其接收旨在传送到WPC接收器的RF输出164的控制信号,以操作附件上的负载或其他装置。类似地,WPC功率发射器118可以包括两个RF输出,其接收来自WPC功率接收器120的RF输入162的信号。
从图6可以看出,无论WPC功率接收器120相对于WPC功率的相对位置如何,WPC功率接收器120的功率输出优选地能够在附件的操作条件的整个范围内向负载158提供功率。例如,如果WPC功率发射器118和接收器120处于最佳对准,则可以感应地提供高达1安培和12瓦的RF功率,同时电池也再充电。如果在WPC功率发射器118和接收器120处于最佳对准的情况下需要更多的RF功率,则功率管理模块150可以在电池来提取,以提供功率高达每通道3最大安培和总共最大5安培(或其他可应用限制,取决于应用程序)。此外,如果WPC功率发射器118和接收器120不处于最佳对准,甚至太多,使得不向WPC功率接收器120提供感应功率,则WPC功率接收器仍然可以向负载158提供每通道最大3安培和总共最大5安培。
如图3-6中所示的WPC单元110能够在WPC功率发射器118和接收器120之间同时提供四个独立的RF通道,每个方向两个。图8示出了能够使用这四个独立通道来控制可能存在于附件和/或主车辆112上的更大数量的装置的替代实施例的一个示例。特别地,主车辆可以能够发送大数量(如图8所示的六个)的独立RF信号到附件,其中每个RF信号被分配其自己的唯一频带。在一些实施例中,RF信号的相应频带可以被保护带分开,以防止它们之间的信号干扰。这些信号中的每一个可以被输出到两个独立RF通道172中的所选择的一个被发送到WPC功率接收器。在多于两个的信号170尝试仅通过可用的两个独立通道同时发送的情况下,控制器(未示出)可调度传输以避免冲突。沿着RF通道172传播到WPC功率发射器118内的信号被无线地传输到WPC功率接收器120,其中每个信号进而沿着对应的RF通道174被传播到多路复用器176,其将每个信号发送到一系列带通滤波器178。带通滤波器178各具有频率范围,该频率范围对应于使用相应频带170进行控制的特定螺线管或其他RF操作的装置。基本上,每个带通滤波器178拒绝任何不具有频率对应于与其连接的装置的信号。以这种方式,可以根据需要通过在独立RF通道172和174中的相应一个上依序发送那些信号,来在WPC功率发射器118和接收器120之间通过无线RF信令实现任何所需数量的功能。
睡眠模式
在一些实施例中,在当WPC功率发射器118断电并且不能提供感应功率和/或信令的时间期间,可能需要减少来自WPC功率接收器120的附件上的电池的功率提取。因此,电路板136可以包括“睡眠模式”电路,其能够:(1)在没有从发射器接收到感应功率并且没有从WPC功率发射器118接收到切换信号的时间间隔期间关闭来自WPC功率接收器120的所有功率输出;(2)向RF电路提供低功率以周期性地在WPC功率发射器118和WPC功率接收器120之间对RF通道进行采样;和(3)从睡眠模式唤醒WPC功率接收器120以向附件提供输出功率。在一些实施例中,加速度计可以被包括在检测振动的WPC功率接收器120中,这表明主卡车功率开启,并且因此WPC功率发射器118可用以提供感应功率和RF数据通信。
例如,在一些实施例中,WPC功率接收器可以被配置为(1)当所包含的加速度计检测到振动时,(2)当从WPC发射器118接收到感应功率时,或者(3)当通过在WPC功率发射器118和WPC功率接收器120之间对RF信道进行采样来检测RF信号时中的任一而被从睡眠模式唤醒。可替换地,当没有从WPC发射机118接收到感应功率和切换信号时,睡眠模式可以被启动。
时间平均感应功率传输最大化
如前所述,并且具体参考图7,WPC功率发送器118和WPC功率接收器120之间的感应功率传输的量对这两个单元之间的对准敏感。图9A至9C示出了允许主车辆112的滑车114相对于主车辆112在预选距离上移动的安装机构的一个实施例,而没有相对于WPC功率发射器118同时移动WPC功率接收器120。
特别地,WPC功率发射器118可以使用发射器支架186安装到主车辆112的框架,发射器支架186平行并远离WPC功率发射器118的底表面延伸。WPC功率接收器120可以使用包括滑轨180、套筒190和托架188的组件进而被安装到主车辆112的滑车114上。特别地,支架188包括刚性地固定到WPC功率接收器120背面的竖直部分,以及WPC功率接收器120在其上放置的水平部分。套筒190可滑动地接合轨道180,并且被刚性地固定到托架188的竖直部分。轨道180进而被刚性地固定到滑车114上。
在图9A所示的静止位置,其中WPC功率发射器118和接收器120处于最佳对准并且滑车114处于其最低位置,支架188的水平部分搁置在支架186的顶部上,防止WPC功率接收器120相对于WPC功率发射器118向下移动。如图9B中所示,当滑车向上提升时,轨道180可以在套筒190中滑动,而WPC功率接收器120由于其重量而保持在适当位置。然而,附接在轨道180的基部处的是块184,当滑车继续向上运动时,最终卡住支架188的突出部分,并且从而将WPC功率接收器120提升成不对准状态,如图9C所示。相反,当滑车114下降回到图9A的静止位置时,WPC功率接收器120的重量使其沿着向下的路径跟随,直到支架188卡在支架186上。
如图9A-9C可见,该新颖的布置允许滑车114相对于主车辆的杆移动大于WPC单元110的直径、高度、宽度或其它适当尺寸的距离,同时仍然在WPC功率发射器118和WPC功率接收器120之间提供感应功率。换句话说,所公开的结构允许主车辆112的滑车114在整个运动范围(竖直,水平,倾斜等)移动,而不会减小或以其他方式抑制WPC发射器118向WPC接收器120提供感应功率的能力,并通过延伸至附件和/或附件上的电池操作装置。
在优选实施例中,滑轨的长度不小于12英寸。发明人已经确定,在该范围,例如,在Hi/Lo箱夹具应用的正常操作期间,WPC功率发射器118和接收器120处于超过80%的时间内的最佳对准,并且该配置消除了需要更换电池。然而,应当理解,其他用途可能需要不同长度的轨道。还应该理解的是,图9A至9C仅是示例性的,因为不同的结构还可以允许主车辆10的滑车的行驶范围,而没有WPC功率发射器118和接收器120从它们最佳对准的相应的相对移动。例如,当在“翻转”载荷时,在滑车倾斜角度地离开升降车的翻转应用时,弯曲轨道180沿着竖直轴线从图9A至9C所示转动90度可能更合适。
从图9A-9C中可以看出并且也参照图6和前面的段落0051-0055,所公开的WPC单元110与刚公开的安装机构相结合,允许附件上的装置在附件的全部操作范围期间根据需要并且不间断地接收功率,同时显著地在附件的电池上保持充电状态。在使用附件的很大一部分时间内,附接侧装置可以使用从主车辆直接接收的感应功率来供能。此外,通过也布线电池功率通过WPC接收器120,功率管理模块150可以无缝地在附件的电池上提取,以在感应功率不足时为这些装置供能,-或者是因为需要比感应地输送的更多的功率,或者是因为如果附件移动超过安装机构维持与WPC单元110对准的范围则WPC功率接收器120不再与WPC功率接收器118对准。
换句话说,所公开的安装机构大大增加了当连接侧装置可以在没有从附件上的电池中提取功率的情况下操作的时间。然而,通过还将来自附件的电池的功率布线通过WPC接收器120,甚至当来自WCP发送器118的感应功率被中断或当负载要求增加超过可以感应地提供的时,功率管理模块150可以确保那些连接侧装置不会看到任何功率中断。在这样的间隔期间,功率管理模块150可以无缝地提取来自附件的电池的功率,因为该功率被传送到与来自WPC功率发射器118的感应功率相同的通道上的负载。此外,当附件被移动到使得WPC功率接收器120返回到与WPC功率发射器118对准的位置,感应功率可以被再次用于无缝地且不间断地直接对附接侧装置供能,从而降低或消除附件电池上的提取,并且因此电池可以被再充电。
本领域普通技术人员将理解,尽管所公开的用于WPC单元110的安装机构提供了当滑车和/或附件相对于主车辆移动时提供维持WPC功率发射器118和WPC功率接收器120之间的对准关系的益处,在一些实施例中,可以省略公开的安装机构,同时仍保留与WPC单元110相关联的益处,例如在感应/电池功率等之间的无缝功率切换。
侧移叉定位件应用
图10示意地示出了至主车辆112的侧移叉定位件附件210。主车辆112(升降车)包括WPC动力单元110,WPC动力单元110包括如前所述的发射器118和接收器120,并用于从车辆电池154传输功率并且从手动致动器214向电磁选择阀阵列216传输RF控制信号。虽然如图10所示,电磁选择器阀阵列216安装在滑车上,但其可以替代地安装在附件上。类似地,虽然图10示出了WPC接收器120直接连接到滑车214上的选择阀216,其他的实施方式,例如具有安装在附件210上的控制器的那些,可以具有来自WPC接收器120的输出连接全部连接到附件154,具有从附件到选择阀阵列216的其它连接(未示出)。加压的液压流体经由两个液压管线260、262(其中仅一个在图10中示出)被运送到选择阀阵列216。
图11是可以可选地用于侧移叉定位件210的示例性无线液压控制系统的示意性电路图。然而,该类型的系统也可以应用于侧移负载夹具,特别是具有平行滑动夹臂的一个。如图11中所示的液压回路能够使升降车操作员利用具有手柄264a的车身上的单个控制阀264来分开地控制侧移功能和叉定位功能,手柄264a上安装有电气开关264b。单独对液压管线260和262通过在升降车的杆116上延伸而在升降车112和可竖直移动的负载处理器210之间连通,采用诸如传统软管卷轴之类的管线接收装置来适应负载处理器相对于升降车车身的可变竖直位置。
在图11的电路中,升降车112的发动机驱动的液压泵268将来自储存器270的压力下的液压流体通过管线272泵送到操作者的控制阀264。安全阀274提供防止管线272中的过大压力的保护。如果操作者手动将阀264的阀芯从其中心位置向下移动,如图11所示,来自管线272的加压流体通过管线262传导到图10所示的阀阵列216内的负载处理器的电磁操作液压选择阀276。阀276的阀芯被向上弹簧偏置,如图11所示,使得管线262中的流体操作第一液压致动器和功能,其中流体被传导到侧移活塞和缸组件224的一端,使活塞向左移动,如图11所示,而流体同时通过管线260和阀264被排出到储存器270。可替换地,如果操作者希望在相反方向上进行侧移,则他手动地将阀264的阀芯向上移动,如图11所示,这将加压流体从管线272传导到管线260,使活塞沿相反方向移动,同时将流体通过管线262和阀264排出到储存器270。
如果不是以一个方向或另一个方向致动侧移活塞和缸组件224,操作者希望操作处于叉定位缸230和232形式的第二液压致动器,则他使用相同的阀264控制该负载处理器的第二功能,同时手动关闭开关264b,例如通过手柄264a上的按钮。开关264b的闭合使得WPC功率发射器118向WPC功率接收器120发送RF信号,RF GP输出,其进而传播信号到WPC接收器120中的GPO开关156。
GPO开关156将通过对功能选择阀276的螺线管276a供能并将其阀芯如图11所示克服弹簧276b的力向下移动,来响应由操作者关闭开关264b而启动的RF信号。阀276的该移动使液压管线282与管线262连通。如果操作者已将阀264的阀芯向下移动,则管线282通过从管线262接收加压流体使叉定位活塞和缸组件230和232缩回,从而使流体从活塞和缸组件230和232通过管线260和阀264被排出到储存器270。活塞和缸组件230和232的这种缩回缩小了叉或叉定位负载处理器210之间的分离。相反,阀264的阀芯的操作者的向上移动同时闭合开关264b通过管线260传导加压流体以延伸活塞和缸组件230和232以加大叉之间的分离,同时流体通过管线282、阀276、管线262和阀264排出到储存器270。
如前所述,当需要操作螺线管276a和GPO开关156以及向GPO开关发送控制信号156时,WPC接收器120接收由侧移叉定位件上的电池154增强的感应功率。
箱夹应用
图12示意性地示出了主车辆112,该主车辆112连接到例如可以是箱夹附件的附件310。主车辆112(升降车)包括WCP功率单元110,该WCP功率单元110包括如前所述的发射器118和接收器120,并且也如前所述的用于从车辆电池312传送功率与所需的任何RF控制信号一起,为附件310上的装置供能,并且使用手动致动器314。加压的液压流体经由两个液压管线360、362(其中仅一个在图12中示出)被运送到附件310。
此外,主车辆112被配置为基于来自附件310上的传感器阵列316的数据来接收一个或多个信号,并且用于控制管线360、362中提供的压力大小。如下面更详细地描述的,从传感器阵列316提供的数据可以直接提供给主车辆上的可选的驾驶员接口控制器318,该驾驶员接口控制器使用提供的数据来确定适当的管线压力,或者替换地可以向控制器320提供来自传感器阵列的数据。
图13和14示出了可以用作图12所示系统中的附件的箱夹310,其功能将作为背景来提供以说明根据图12所示系统使用的WPC发射器118和WPC接收器120的实用性。具体来说,示例性的箱夹310可以是液压动力的、可滑动臂夹具,其具有适于安装在升降车滑车301上的框架311(图12所示),该升降车滑车301沿着常规的可倾斜直立液压动力的、负载提升杆302可选择性地线性地往复运动。图中所示的特定示例性的可滑动臂夹310通常用于处理棱柱形物体,例如图14中的箱或包装313,并且可以是任何合适的可滑动臂设计。夹紧臂315、317可以垂直于平面或负载接合表面321、332选择性地彼此远离或朝向滑动。液压缸326、328选择性地延伸或缩回相应的夹紧臂321、332。可以理解的是,箱例如313如果受到过度的过夹紧以防止箱夹310的摩擦抓紧,则其可能会损坏。
尽管在本文中描述了液压操作的箱夹310作为示例性实施例,但是其它的负载夹具有与所描述的类似的特征。例如,液压操作的枢转臂纸卷夹可以根据本负载夹紧系统来配置。
箱夹310可以包括数据接收器,例如设置在夹310上的电子代码阅读器332。因此,要夹紧的物品可以有利地用编码标签334标记。编码标签334可以优选地包含将如下文描述的、足以有助于确定用于标记物品的适当的最大夹紧力。编码标签334可以例如传送包含物品的负载ID或其他直接或间接特征识别标记的数字数据串。负载可以包括一个或多个标记的箱或包装313,因此针对单个标签的物品的合适的夹紧力可以或不可以适于整个负载。如稍后将描述的,本系统的实施例利用WPC发射器118和WPC接收器120之间的通信通道进行该确定。
电子代码阅读器332定位成在构成负载处理夹具310的负载的至少一个物品上读取编码标签334。电子代码阅读器332可以自动操作,例如通过搜索编码的标签每当夹臂处于打开位置或每当在夹臂之间检测到负载时,如下面将更详细描述的。可替换地,电子代码阅读器可以由夹操作者手动操作。编码标签334和电子代码阅读器332可以分别是条形码和条形码扫描器、射频识别(RFID)标签和RFID读取器、或其他机器可读标签和相应的读取器组合。在RFID系统的情况下,可以限制夹的RFID读取器,使得其仅检测设置在夹臂315、317之间的RFID标签。替换地,可以由夹操作者输入负载ID或其他装载标记,例如,当编码标签以某种方式呈现为不可读的,或者如果某物品的标签不正确。
电子代码阅读器332将从编码标签334读取的信息发送到控制器,控制器可以是在附件310(箱夹)上的图12中所示的控制器320或者主车辆112上的控制器318,取决于图12中所示的系统的配置,并且这将在本说明书后面进行说明。控制器320(或318)解析信息以识别负载ID或其他识别标记。这是以所使用的本系统的特定实施例的特定实施方式所要求的任何方式来实现的。
当夹臂15,17处于打开位置时,臂部分地限定三维夹紧区域。为了夹紧负载,夹操作者定位夹臂15、17,使得负载设置在夹紧区域中。负载几何传感器350与控制器318或320进行数据通信,并且被设置在相应的负载接合表面321、332上。负载几何传感器350通常在相对表面321、323的方向上向内定向。
每个负载几何传感器350作为吸收的刺激的函数,来吸收和动态地调制其与控制器318或320之间的通信介质的特性。在本系统的某些实施例中,传感器350可以例如是红外光束传感器,例如可从夏普公司商业获得的IR红外光束传感器的GP2XX系列。
这种传感器的示例包括发射器部件、探测器部件、模拟输出和内部电路。传感器发出红外(IR)光束。IR光束穿过夹紧区域行进直到其遇到障碍物,例如负载的干扰表面,或者在没有负载的情况下遇到相反的负载接合表面。优选地但不是必须地,干涉表面平行于负载接合表面,并且光束在垂直于负载接合表面的平面中发射。IR光束被表面反射并且被探测器部件至少部分地吸收。在传感器内,内部电路测量传感器和吸收的红外光之间的角度,并且通过三角运算,使用该角度进一步计算传感器与干扰表面之间的距离,并将该距离表示为模拟电压。传感器通过模拟输出将计算出的距离信息通信给控制器40。
进一步参考图13,在一个示出的示例性实施例中,传感器350可以以行和列的网格阵列布置。当夹臂321、323之间的空间未被占用时,所有传感器输出的刺激将与夹紧臂之间的距离相当。然而,当物品313的负载插入在夹臂321、332之间时,来自至少一个负载几何传感器350的信号将改变。然后,控制器318或320可以计算负载的近似体积。负载几何传感器的行数和列数,其信号表示负载的存在分别对应于负载的高度和深度,以及来自阻碍的传感器的信号的变化幅度,相对于传感器不受阻碍时所产生的信号,对应于负载的宽度。可替换地,传感器350可以以任何其它合适类型的阵列布置。
负载几何传感器350中的至少一个也可以用作负载接近传感器。如下所述,在夹紧操作期间,本系统有利地作为夹紧臂和负载之间的距离的函数来调整最大液压夹紧压力,使得期望的夹紧压力达到期望的距离。
本系统(未示出)的其它实施例,例如旨在与用于夹紧圆柱形物体的液压操作的枢转臂夹一起使用的实施例,可以利用不同的传感器布置来测量负载几何形状。例如,圆柱形负载的直径和高度可以以与上述相同的方式来确定。借助于非限制性示例,圆柱形负载(未示出)的直径可以替代地通过当夹紧臂接触负载、但是在夹紧负载之前测量液压缸(未示出)的行程来确定,这与其它传感器结合来使用弦线电位器(未示出)或蚀刻的杆和光学编码器(未示出)。
在本系统的示例性实施例中,控制器318或320可以访问存储器(未示出),该存储器包含当夹紧和提升各种负载类型及其几何结构时对应于夹的优选操作的信息,其优选地设置在通过负载类别和负载几何形状组织的查找表中。该信息可以是优选地与最佳最大夹紧力,或最佳最大液压夹紧压力密切相关的特征,例如负载重量、负载易碎性、负载包装等。对于每个负载类别,数据进一步优选地根据检测到的负载类别的潜在几何配置来分类。
在一些实施例中,数据可以静态地存储在远离主车辆112和/或附件310的位置,例如在设施的中央管理系统或非现场数据库中,并且可以在内部和/或外部网络或多个网络上访问控制器318或320。在确定相关负载特性(例如负载类别和几何构型)时,控制器可以将必要的数据从外部源复制到存储器内。
存储器中的数据可以是对于夹具可能在其操作的设施处遇到的负载和负载几何形状特定的。可以根据需要通过数据接收器更新数据;例如当将新类别的负载被引入设施时或当前数据的某一方面被认为不足或不准确时。
如上所述,本系统可以通过读取负载上的编码标签334来获得要夹紧的负载313的负载ID或其他识别标记。替换地,可以通过其他类型的数据接收器直接从设施的中央管理系统或经由无线网络接口从其他负载处理夹获得这种负载ID或其他识别信息。如上所述,本系统使用负载几何传感器来计算负载的近似体积。有利地,在夹臂夹紧负载之前确定两个信息项,并且不需要来自夹操作者的输入。控制器318或320查找用于所确定的负载ID和负载几何轮廓的最佳最大液压夹紧压力。然后在夹紧操作期间将该最佳最大压力施加到负载。
参考图15,液压夹紧缸326、328通过液压回路进行控制,通常以简化的示意形式表示为370。液压夹紧缸326、328通过泵378和供应管道382从升降车的储存器374接收加压的液压流体。如果在系统中产生过大的压力,则安全泄压阀386打开以将流体分流回到储存器374。管道382中的流动提供手动致动的夹紧控制阀390,以及手动操作的阀,例如控制升降、倾斜、侧移等的阀(未示出),其可以与阀390串联布置。夹紧控制阀390由操作者选择性地控制,以使气缸326、328打开夹紧臂或者关闭夹紧臂以与负载中的物品313初始接触。
为了打开夹紧臂315、317,示意性地示出的阀390的阀芯在图15中向左移动,使得来自管线382的加压流体通过管线394和分流器/组合器398传导到缸326、328的活塞端,从而由于分流器/组合器398的相等流量输送操作以大致相等的速率延伸缸326和328,并且使夹臂315、317彼此远离地移动。先导式止回阀402通过管线394中的夹紧打开压力被打开,该管线394通过先导管线406连通,当缸326、328延伸时,使得流体能够从缸326、328的杆端通过管线410和阀390排出到储存器374。
可替换地,为了闭合夹紧臂并夹紧负荷的物品313,阀390的阀芯在图15中向右移动,使得来自管线382的加压流体通过管线410传导到缸326、328的杆端,从而使缸326、328缩回并使夹紧臂313、317朝向彼此移动。流体以实质上相等的速率从缸326、328的活塞端排出到储存器374,通过分流器/组合器398,并且然后经由阀390通过管线394。在夹紧臂313、317通过缸326、328的缩回而闭合期间,优选地通过一个或多个压力调节阀来控制管线410中的最大液压闭合压力。例如,这种压力调节阀可以是与管线410平行的管线418中的比例溢流阀414,这样的最大液压关闭压力对应于控制器318或320经由控制管线422以实质上可无级改变的方式自动选择的不同设置,这通过可变地控制阀的螺线管414a来电子地调节阀414的安全压力设置。替换地,比例减压阀可以串联插入管线410中以调节管路410中的最大液压关闭压力。作为另外的替代方案,为此目的可以使用可选择的多个非比例压力释放阀或压力降低阀。如果需要,控制器318或320还可以通过来自可选压力传感器430的液压关闭压力接收夹紧力的反馈,以帮助其控制上述压力调节阀。这种反馈可以替代地由适当安装的夹紧力测量电换能器(未示出)提供。
再次参考图12,WPC发射器118和WPC接收器120之间的RF和/或CAN总线通信通道可用于有利地使用在一些装置中从代码阅读器332和负载几何传感器350和压力传感器430接收的数据来控制箱夹310的操作。在第一实施例中,例如,主车辆112上的控制器318可以经由CAN总线通信通道124c、126c从传感器350接收负载几何数据(图5中所示),并且还可以从CAN总线通信通道从代码读取器332接收数据。因此,主车辆上的控制器318可以使用该信息来确定适当的夹紧压力,如前所述。使用CAN通道来通信传感器和负载ID数据有利地允许使用RF通道来同时将其他数据传送回主车辆,这可能是有用的,例如,当操作完成或者附件处于正确的位置时通过打开指示器或为螺线管供能进行功能控制来警告操作者。
在替代实施例中,附件310(箱夹)可以包括控制器320,控制器320从负载几何传感器350和代码阅读器332接收数据,并使用该数据来确定合适的夹紧压力,然后经由一个或多个RF通信信道(或CAN通道,如果合适的话)从WPC接收机120到WPC发射机118将其传递到主车辆112。例如,在可能的夹紧压力被限制到两个替代压力的情况下,可以使用单个RF通道来传达所需的压力。可替换地,两个RF通道将允许通信达到四个可能的压力之一。如果可得到更多的可能压力,则根据应用,可以使用CAN通信通道,更多的RF通道可以集成到WPC单元110中,或者可以使用如图8所示的复用系统。如前所述,使用CAN通道返回到主车辆通信将允许其他信息通过RF通道同时被发送到主车辆。
应当理解,刚刚描述的箱夹具示例仅用于说明目的,因为WPC单元110的可能应用扩展到发送数据到主车辆的任何附件,其用于通过使用模拟或如前所述通过RF 110通道的比二进制切换控制更复杂的其他反馈来比例控制附件。还应当理解,从附件310传送到主车辆112的数据可以用于经由适当的控制器318或320来自动控制附件310,或者可替代地可以用于通过GUI或其他显示器、音频设备等向用户提供信息,其然后通过诸如触摸屏、键盘、杆或任何其他输入装置的接口进行适当的响应,以发布新命令,该新命令类似地通过WPC单元110和/或压力管线360、362发送回附件。
本领域普通技术人员还将理解,图12中示意性示出的布置仅是示例性的,并且可以适当地修改。例如,尽管图12示出了安装在滑车301上的流动和压力阀阵列,该阵列可以替代地安装在附件上。类似地,尽管图12示出了WPC接收器120被直接连接到滑车301上的阀阵列,其它实施方式可以具有来自WPC接收器120的输出连接全部连接到附件310上的设备(例如,电池、控制器),其具有从这种装置至滑车301上的阀阵列其他连接(未示出)。
应当理解,本发明不限于已经描述的特定实施例,并且在不脱离如所附权利要求中限定的本发明的范围的情况下可以进行改变,如根据现行法律原理解释的包括等同原则或任何其他扩大超出其字面范围的权利要求的可执行范围的原理。除非上下文另有说明,权利要求中对于元素实例数的引用,无论是引用一个实例还是多于一个实例,至少需要指定数量的元素实例,但不打算从权利要求的范围排除具有比所述的更多的元素实例的结构或方法。当在权利要求中使用时,词语“包括”或其衍生物以非排他意义使用,其不旨在排除所要求保护的结构或方法中其他元件或步骤的存在。
Claims (16)
1.一种工业传输组件,包括:
(a)发射器单元和接收器单元,该发射器单元能够向该接收器单元发射无线电功率;
(b)该接收器单元具有壳体和第一接线连接器和第二接线连接器,该第一接线连接器从所述壳体延伸并能够连接至在所述接收器单元的壳体外并远离所述发射器单元的功率消耗负载设备,从而当被连接时所述功率消耗负载设备可以接收所述无线电功率,并且所述第二接线连接器从所述壳体延伸并能够连接至在所述接收器单元的壳体外的功率存储装置,其中当所述接收器单元不从所述发射器单元接收所述无线电功率时,所述第一接线连接器能够向所述功率消耗负载设备输送电功率。
2.如权利要求1所述的工业传输组件,其中所述发射器单元能够向该接收器单元无线地发射数据。
3.如权利要求2所述的工业传输组件,其中所述发射器单元发射RF数据和网络协议数据中的至少之一。
4.如权利要求1所述的工业传输组件,其中所述接收器单元能够向该发射器单元无线地发射数据。
5.如权利要求4所述的工业传输组件,其中所述发射器单元发射RF数据和网络协议数据中的至少之一。
6.一种工业传输组件,包括:
(a)发射器单元和接收器单元,该发射器单元能够向该接收器单元发射无线电功率;
(b)该接收器单元具有壳体和第一接线连接器和第二接线连接器,该第一接线连接器从所述壳体延伸并能够连接至在所述接收器单元的壳体外并远离所述发射器单元的电池,该第二接线连接器从所述壳体延伸并能够连接至在所述接收器单元的壳体外并远离所述发射器单元的功率消耗负载设备;其中
(c)所述第一接线连接器能够使用所述无线电功率的第一部分给该电池再充电,而所述第二接线连接器同时将所述无线电功率的第二部分输送至所述功率消耗负载设备。
7.如权利要求6所述的工业传输组件,其中所述第一接线连接器能够从所述电池接收电功率。
8.如权利要求7所述的工业传输组件,其中当所述功率消耗负载设备被连接到所述接收器单元时,从所述电池接收的所述电功率能够给所述功率消耗负载设备供能。
9.如权利要求8所述的工业传输组件,包括所述接收器单元中的功率管理控制设备,该功率管理控制设备管理所述无线电功率和来自所述电池的电功率的使用。
10.如权利要求6所述的工业传输组件,包括在所述接收器单元中的感应线圈。
11.如权利要求10所述的工业传输组件,其中所述感应线圈被电连接至功率管理模块,该功率管理模块选择是否从所述感应线圈、从所述电池、或从所述感应线圈和所述电池将电功率发送至所述功率消耗负载设备。
12.一种工业传输组件,包括:
(a)壳体,该壳体容纳能够接收无线电功率的感应线圈;
(b)输入连接器,所述输入连接器从所述壳体延伸并能够连接至在所述壳体之外的存储装置以从所述存储装置实现接线电功率;
(c)输出连接器,所述输出连接器从所述壳体延伸并且能够连接并输送电功率到在所述壳体之外的负载;和
(d)执行功率管理系统的电路,该功率管理系统将输出功率引导至所述输出连接器,所述输出功率包括自动选择的、所述接线电功率和所述无线电功率的组合。
13.如权利要求12所述的工业传输组件,其中所述功率管理系统能够仅选择所述无线电功率来引导至所述输出连接器。
14.如权利要求12所述的工业传输组件,其中所述功率管理系统能够仅选择所述接线电功率来引导至所述输出连接器。
15.如权利要求12所述的工业传输组件,其中所述接线电功率来自电池。
16.如权利要求15所述的工业传输组件,其中所述功率管理系统可以选择性地使用所述无线电功率的第一部分给所述电池再充电,同时将所述无线电功率的第二部分输送至所述输出连接器。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811024255.6A CN109245323B (zh) | 2015-02-10 | 2015-10-30 | 用于工业设备的无线功率传输和通信 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/618,784 US9935469B2 (en) | 2015-02-10 | 2015-02-10 | Wireless power transfer and communications for industrial equipment |
| US14/618,784 | 2015-02-10 | ||
| PCT/US2015/058476 WO2016130184A1 (en) | 2015-02-10 | 2015-10-30 | Wireless power transfer and communications for industrial equipment |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201811024255.6A Division CN109245323B (zh) | 2015-02-10 | 2015-10-30 | 用于工业设备的无线功率传输和通信 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107302847A CN107302847A (zh) | 2017-10-27 |
| CN107302847B true CN107302847B (zh) | 2021-04-27 |
Family
ID=56567149
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201580075867.6A Active CN107302847B (zh) | 2015-02-10 | 2015-10-30 | 用于工业设备的无线功率传输和通信 |
| CN201811024255.6A Active CN109245323B (zh) | 2015-02-10 | 2015-10-30 | 用于工业设备的无线功率传输和通信 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201811024255.6A Active CN109245323B (zh) | 2015-02-10 | 2015-10-30 | 用于工业设备的无线功率传输和通信 |
Country Status (8)
| Country | Link |
|---|---|
| US (2) | US9935469B2 (zh) |
| EP (2) | EP3591781A1 (zh) |
| JP (1) | JP6644801B2 (zh) |
| CN (2) | CN107302847B (zh) |
| AU (3) | AU2015382381B2 (zh) |
| BR (1) | BR112017017204B1 (zh) |
| CA (1) | CA2975683C (zh) |
| WO (1) | WO2016130184A1 (zh) |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20180278079A1 (en) * | 2012-01-11 | 2018-09-27 | Wheel Charge Technologies LLC | Apparatus for Wireless Power Transmission Between an External Power Source and an Electric Mobility Vehicle |
| US9935469B2 (en) | 2015-02-10 | 2018-04-03 | Cascade Corporation | Wireless power transfer and communications for industrial equipment |
| US10414359B2 (en) * | 2015-02-16 | 2019-09-17 | Tyri International, Inc. | System for providing wireless operation of powered device(s) on a vehicle |
| US10680678B2 (en) * | 2015-02-16 | 2020-06-09 | Tyri International, Inc. | System for providing wireless operation of powered device(s) on a vehicle with direct charging |
| US9525288B2 (en) * | 2015-02-26 | 2016-12-20 | Cascade Corporation | Devices and methods for inductive power transfer and power control for industrial equipment |
| EP3187455B1 (de) * | 2015-12-29 | 2021-12-01 | STILL GmbH | System aus flurförderzeug und batterieladevorrichtung |
| DE102016102652A1 (de) * | 2016-02-16 | 2017-08-17 | Jungheinrich Aktiengesellschaft | Flurförderzeug mit einem Leuchtmittel am Lasttragmittel |
| US10688874B2 (en) * | 2016-06-14 | 2020-06-23 | Intel Corporation | Vehicular inductive power transfer systems and methods |
| US10399449B2 (en) * | 2016-08-08 | 2019-09-03 | Hyundai Motor Company | Wireless charging control apparatus and method for optimal charging by adjusting the inclination of the electric vehicle being charged |
| US10501298B2 (en) * | 2017-04-04 | 2019-12-10 | Tyri International, Inc. | Linear actuator system for moving tines of a work vehicle |
| EP3461673B1 (en) * | 2017-09-27 | 2020-08-05 | Tyri International, Inc. | System for providing wireless operation of powered device(s) on a vehicle with direct charging |
| US11159122B2 (en) * | 2018-06-21 | 2021-10-26 | Ravi Chailertborisuth | Apparatus for charging a handheld computing device |
| CN109193958B (zh) * | 2018-09-13 | 2021-01-15 | 京东方科技集团股份有限公司 | 无线充电装置及其充电机构和电子系统 |
| DE102019201599A1 (de) * | 2019-02-07 | 2020-08-13 | Bhs Intralogistics Gmbh | Überführungsanordnung |
| AU2020260416A1 (en) | 2019-10-29 | 2021-05-13 | The Raymond Corporation | Systems and methods for a mobile carousel with power and communications contacts |
| CN110730117B (zh) * | 2019-11-07 | 2022-04-15 | 三一汽车起重机械有限公司 | 一种基于can总线的组装式吊臂及起重机 |
| JP6872000B1 (ja) * | 2019-12-16 | 2021-05-19 | 日本航空電子工業株式会社 | 無線コネクタ着脱方法、ロボット装置及び無線コネクタ |
| JP6872050B1 (ja) * | 2020-02-03 | 2021-05-19 | 日本航空電子工業株式会社 | ロボット装置及び無線コネクタ |
| FI129188B (en) * | 2020-02-24 | 2021-08-31 | Stevenel Oy | Lifting device for cellulose units |
| DE102020110481B3 (de) * | 2020-04-17 | 2021-08-12 | Tadano Demag Gmbh | Induktionssensoranordnung einer Sicherungs- und Verriegelungseinheit eines Teleskopauslegers eines Fahrzeugkrans |
| JP6995941B1 (ja) | 2020-07-07 | 2022-01-17 | 日本航空電子工業株式会社 | 無線コネクタ着脱方法、ロボット装置、無線コネクタ及び無線コネクタユニット |
| EP4119491A1 (en) * | 2021-07-16 | 2023-01-18 | TOYOTA MATERIAL HANDLING MANUFACTURING ITALY S.p.A | Industrial truck capable of recognizing a material handling apparatus |
| IT202100024086A1 (it) * | 2021-09-20 | 2023-03-20 | Bolzoni Spa | Dispositivo di supporto e controllo di una batteria elettrica per attrezzature di movimentazione di un carrello elevatore e attrezzatura di movimentazione comprendente tale dispositivo. |
| WO2023147494A1 (en) * | 2022-01-27 | 2023-08-03 | Cascade Corporation | Variable load geometry clamp pressure control |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101648524A (zh) * | 2009-09-17 | 2010-02-17 | 北京地下铁道车辆技术研究所 | 交通车辆供电系统及其管理方法 |
| CN201478885U (zh) * | 2009-06-04 | 2010-05-19 | 速得股份有限公司 | 充电装置 |
| CN103078365A (zh) * | 2012-12-26 | 2013-05-01 | 青岛歌尔声学科技有限公司 | 蓝牙耳机充电盒及其充电方法 |
| CN202997644U (zh) * | 2012-12-26 | 2013-06-12 | 青岛歌尔声学科技有限公司 | 蓝牙耳机充电盒 |
| CN103703651A (zh) * | 2011-07-24 | 2014-04-02 | 株式会社牧田 | 电动工具系统和其适配器 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3768367A (en) | 1969-05-07 | 1973-10-30 | Caterpillar Tractor Co | Remote control system for load manipulating vehicles |
| US3647255A (en) | 1969-11-14 | 1972-03-07 | Gordon H Hale | Remote-controlled grapple |
| JPS5238323B2 (zh) | 1971-12-27 | 1977-09-28 | ||
| US4381872A (en) | 1981-03-26 | 1983-05-03 | Mcginnes Manufacturing Company | Remote controlled clamshell bucket apparatus and method of using same |
| US4526413A (en) | 1984-04-09 | 1985-07-02 | Williams Howard G | Remote controlled self-powered excavator apparatus |
| US6431816B1 (en) | 1998-10-07 | 2002-08-13 | Cascade Corporation | Adaptive load-clamping system |
| JP3756068B2 (ja) * | 2001-02-27 | 2006-03-15 | 矢崎総業株式会社 | 給電装置 |
| US6662881B2 (en) | 2001-06-19 | 2003-12-16 | Sweepster, Llc | Work attachment for loader vehicle having wireless control over work attachment actuator |
| US8403618B2 (en) | 2004-11-30 | 2013-03-26 | Cascade Corporation | Lift truck load handler |
| US8169185B2 (en) | 2006-01-31 | 2012-05-01 | Mojo Mobility, Inc. | System and method for inductive charging of portable devices |
| JP5192732B2 (ja) * | 2006-05-31 | 2013-05-08 | 株式会社半導体エネルギー研究所 | 半導体装置及び当該半導体装置を具備するicラベル、icタグ、icカード |
| US8805530B2 (en) | 2007-06-01 | 2014-08-12 | Witricity Corporation | Power generation for implantable devices |
| JP2009120156A (ja) * | 2007-11-19 | 2009-06-04 | Mitsubishi Cable Ind Ltd | 車両用電装システム |
| US7884927B2 (en) * | 2008-01-07 | 2011-02-08 | Seiko Epson Corporation | Power transmission control device, non-contact power transmission system, power transmitting device, electronic instrument, and waveform monitor circuit |
| US8078315B2 (en) | 2008-05-08 | 2011-12-13 | Cascade Corporation | Control system for a load handling clamp |
| US20120248886A1 (en) | 2008-09-27 | 2012-10-04 | Kesler Morris P | Multi-resonator wireless energy transfer to mobile devices |
| US8869944B2 (en) | 2010-03-01 | 2014-10-28 | The Raymond Corporation | Energy storage on an elevated platform and transfer method |
| CN101984537A (zh) * | 2010-11-19 | 2011-03-09 | 武汉中原电子集团有限公司 | 一种电动汽车磁力共振无线充电装置 |
| JP5713714B2 (ja) * | 2011-02-10 | 2015-05-07 | キヤノン株式会社 | 給電装置及び制御方法 |
| KR101850527B1 (ko) * | 2011-03-25 | 2018-04-19 | 삼성전자주식회사 | 휴대용 디바이스 및 휴대용 디바이스의 무선 전력 충전 시스템 |
| US10523276B2 (en) * | 2011-08-16 | 2019-12-31 | Qualcomm Incorporated | Wireless power receiver with multiple receiver coils |
| JP6060515B2 (ja) * | 2011-12-22 | 2017-01-18 | ソニー株式会社 | 電子機器および給電システム |
| US9343923B2 (en) * | 2012-08-23 | 2016-05-17 | Cyberonics, Inc. | Implantable medical device with backscatter signal based communication |
| JP6085199B2 (ja) * | 2013-03-14 | 2017-02-22 | 日立マクセル株式会社 | ワイヤレス充電モジュール及びワイヤレス充電システム |
| KR102042685B1 (ko) * | 2013-03-14 | 2019-11-11 | 삼성전자주식회사 | 무선 전력 전송 장치 및 무선 전력 수신 장치 |
| JP6092678B2 (ja) * | 2013-03-25 | 2017-03-08 | 日立マクセル株式会社 | 非接触電力伝送システム |
| JP2014204603A (ja) * | 2013-04-08 | 2014-10-27 | ソニー株式会社 | 給電装置および給電システム |
| US9935469B2 (en) | 2015-02-10 | 2018-04-03 | Cascade Corporation | Wireless power transfer and communications for industrial equipment |
-
2015
- 2015-02-10 US US14/618,784 patent/US9935469B2/en active Active
- 2015-10-30 WO PCT/US2015/058476 patent/WO2016130184A1/en active Application Filing
- 2015-10-30 BR BR112017017204-6A patent/BR112017017204B1/pt active IP Right Grant
- 2015-10-30 CN CN201580075867.6A patent/CN107302847B/zh active Active
- 2015-10-30 CN CN201811024255.6A patent/CN109245323B/zh active Active
- 2015-10-30 AU AU2015382381A patent/AU2015382381B2/en active Active
- 2015-10-30 EP EP19193095.7A patent/EP3591781A1/en not_active Withdrawn
- 2015-10-30 JP JP2017542159A patent/JP6644801B2/ja active Active
- 2015-10-30 CA CA2975683A patent/CA2975683C/en active Active
- 2015-10-30 EP EP15882261.9A patent/EP3257128B1/en active Active
-
2018
- 2018-03-22 US US15/933,050 patent/US11130662B2/en active Active
- 2018-11-08 AU AU2018260913A patent/AU2018260913A1/en not_active Abandoned
-
2020
- 2020-03-05 AU AU2020201665A patent/AU2020201665A1/en not_active Abandoned
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN201478885U (zh) * | 2009-06-04 | 2010-05-19 | 速得股份有限公司 | 充电装置 |
| CN101648524A (zh) * | 2009-09-17 | 2010-02-17 | 北京地下铁道车辆技术研究所 | 交通车辆供电系统及其管理方法 |
| CN103703651A (zh) * | 2011-07-24 | 2014-04-02 | 株式会社牧田 | 电动工具系统和其适配器 |
| CN103078365A (zh) * | 2012-12-26 | 2013-05-01 | 青岛歌尔声学科技有限公司 | 蓝牙耳机充电盒及其充电方法 |
| CN202997644U (zh) * | 2012-12-26 | 2013-06-12 | 青岛歌尔声学科技有限公司 | 蓝牙耳机充电盒 |
Also Published As
| Publication number | Publication date |
|---|---|
| AU2020201665A1 (en) | 2020-03-26 |
| EP3257128A4 (en) | 2018-08-22 |
| US11130662B2 (en) | 2021-09-28 |
| AU2018260913A1 (en) | 2018-11-29 |
| CN109245323A (zh) | 2019-01-18 |
| CN107302847A (zh) | 2017-10-27 |
| CA2975683C (en) | 2022-02-22 |
| US20180212434A1 (en) | 2018-07-26 |
| AU2015382381A1 (en) | 2017-08-24 |
| JP6644801B2 (ja) | 2020-02-12 |
| BR112017017204A8 (pt) | 2022-08-02 |
| JP2018512830A (ja) | 2018-05-17 |
| BR112017017204B1 (pt) | 2023-02-14 |
| CA2975683A1 (en) | 2016-08-18 |
| EP3591781A1 (en) | 2020-01-08 |
| US9935469B2 (en) | 2018-04-03 |
| AU2015382381B2 (en) | 2018-08-30 |
| US20160233687A1 (en) | 2016-08-11 |
| EP3257128A1 (en) | 2017-12-20 |
| BR112017017204A2 (pt) | 2018-06-26 |
| EP3257128B1 (en) | 2019-10-02 |
| CN109245323B (zh) | 2022-05-17 |
| WO2016130184A1 (en) | 2016-08-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107302847B (zh) | 用于工业设备的无线功率传输和通信 | |
| AU2017239567B2 (en) | Devices and Methods for Inductive Power Transfer and Power Control for Industrial Equipment | |
| JP2018510101A5 (ja) | 誘導パワー伝達ユニットにパワーを伝達可能なパワー源を有する産業車両、及び産業車両に選択的に取り付け可能なアタッチメント | |
| US11305936B2 (en) | Commercial logistic facility, configurable modular robotic autonomous guided vehicle, and method therefor | |
| JP7373148B2 (ja) | 自動ガイドフォークリフト | |
| EP1728758B1 (de) | Flurförderzeug mit einer elektrischen Steuerungseinheit | |
| US10168713B2 (en) | Transport vehicle and method for a problem-free transport of heavy-duty shelves in workshops with radio shadowing using a partly autonomous drive mode | |
| US20060255943A1 (en) | Induction charging machine, methods, and system for a data reader | |
| KR20130064580A (ko) | 운반 적재능력을 향상시킨 운반차 | |
| EP0572967A1 (en) | Wireless automated computer-controlled storing and articles transporting system | |
| EP3355149B1 (en) | Material handling system | |
| EP3812339A1 (en) | Material handling vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |