CN107160050B - 一种焊线机 - Google Patents
一种焊线机 Download PDFInfo
- Publication number
- CN107160050B CN107160050B CN201710537745.5A CN201710537745A CN107160050B CN 107160050 B CN107160050 B CN 107160050B CN 201710537745 A CN201710537745 A CN 201710537745A CN 107160050 B CN107160050 B CN 107160050B
- Authority
- CN
- China
- Prior art keywords
- wire
- bonding head
- bonding
- base body
- rod
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K28/00—Welding or cutting not covered by any of the preceding groups, e.g. electrolytic welding
- B23K28/02—Combined welding or cutting procedures or apparatus
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K37/00—Auxiliary devices or processes, not specially adapted to a procedure covered by only one of the preceding main groups
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K2101/00—Articles made by soldering, welding or cutting
- B23K2101/32—Wires
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Wire Processing (AREA)
- Wire Bonding (AREA)
Abstract
本发明公开了一种焊线机,包括机架,还包括设于所述机架、且沿所述机架的横向依次设置的上料机构、工作台和下料机构,所述工作台的纵向两侧分别设有显微镜以及用以进行焊线的邦头,所述显微镜设于所述工作台的外侧;所述邦头具有用以控制所述工作台温度的温度控制器,还包括设于所述邦头用以供焊线进给的送线器。上述焊线机,能够简化劳动强度,方便焊线加工。
Description
技术领域
本发明涉及焊线技术领域,特别涉及一种焊线机。
背景技术
众所周知,焊线机包括金线机、铝线机、超声波焊线机,其用于实现不同介质的表面焊接,是一种物理变化过程。首先需要对焊接的金属表面先进行预热处理,然后在时间和压力的共同作用下,在金属焊接表面产生塑性变形,使两种介质达到可靠的接触,两种金属原子之间在原子亲和力的作用下形成金属键,完成焊接过程。
发明内容
本发明的目的是提供一种焊线机,该焊线机可以简化劳动强度,方便焊线加工。
为实现上述目的,本发明提供一种焊线机,包括机架,还包括设于所述机架、且沿所述机架的横向依次设置的上料机构、工作台和下料机构,所述工作台的纵向两侧分别设有显微镜以及用以进行焊线的邦头,所述显微镜设于所述工作台的外侧;所述邦头具有用以控制所述工作台温度的温度控制器,还包括设于所述邦头用以供焊线进给的送线器。
相对于上述背景技术,本发明提供的焊线机,上料机构、工作台和下料机构沿横向依次设置,位于工作台的纵向两侧设置显微镜和邦头,邦头可以实现对工作台处的待加工部件进行焊接,显微镜位于工作台的外侧,便于供操作人员观察焊线过程。超声波发生器与温度控制器均作用于邦头,确保焊线过程的顺利进行。为了实现焊线过程的连续性,还可以设置送线器,用以连续不断的提供焊线;本发明的焊线机采用如此布局方式,能够实现焊线过程的全自动,上料与下料过程均为自动,操作人员仅仅通过显微镜6观察即可,简化了劳动强度,方便了焊线加工。
优选地,所述送线器包括沿垂向设置的安装板,所述安装板设有可水平转动的线圈固定座以及位于所述线圈固定座一侧的过线杆,固定于所述安装板的过线模组沿送线方向设于所述过线杆的一侧;所述过线模组具有用以供焊线通过的过线通道,且位于所述过线通道的前端设有用以张紧焊线张力的吹气孔,所述过线通道内还设有用以检测焊线摆动的光纤检测部,所述光纤检测部与用以控制所述线圈固定座旋转的动力源相连,以实现当所述光纤检测部检测到焊线摆动时,控制所述动力源开启实现所述线圈固定座的旋转。
优选地,所述邦头包括机体,其特征在于,所述机体设有长度较长、且能够沿Y轴方向运动的第一Y轴平台以及长度较短、且能够沿Y轴方向运动的第二Y轴平台,所述第一Y轴平台与所述第二Y轴平台均连接有位于两者之间的直线滑轨;
所述第二Y轴平台的下方还设有X轴平台;所述第二Y轴平台的上方固定连接有用以焊线的邦头模组,所述邦头模组包括能够上下旋转的换能器;所述邦头模组的顶部依次设有沿Y轴方向延伸的镜头、镜筒、相机和视觉定位模组。
优选地,所述第一Y轴平台的下方设有第一交叉导轨,所述第一Y轴平台的上方设有固定于所述第一交叉导轨且沿X轴向延伸的横档杆,所述横档杆的一侧设有限位部,所述横档杆的另一侧设有锁止部。
优选地,位于所述直线滑轨的上方设有与所述第一Y轴平台固定连接的盖板。
优选地,所述邦头模组还包括邦头基体,所述邦头基体的前端具有向外侧突出的支架,所述支架设有柔性支点,邦头架铰接于所述柔性支点;向前端延伸的所述换能器固定连接于所述邦头架,且所述邦头架还固定有位于所述换能器一侧的打火杆,所述换能器的工作端与所述打火杆的工作端紧邻设置。
优选地,所述上料机构与所述下料机构均包括:
承载台;
设于所述承载台上方的基体;所述基体呈矩形框状;
设于所述承载台且与所述基体相连用以供料盒向下运动的垂向升降部,所述垂向升降部位于所述基体前端;
设于所述承载台用以将位于所述垂向升降部的料盒推出于所述垂向升降部的推料叉子;
所述上料机构还包括设于所述垂向升降部外侧用以将料盒内的晶架推送至所述连接机构的推板部。
优选地,还包括设于所述承载台的放料板,所述放料板位于所述基体的前端;所述推料叉子垂直于所述放料板,所述推料叉子连接有用以实现所述推料叉子水平推移的动力部。
优选地,所述放料板设有多个横向通槽,所述推料叉子伸出于所述横向通槽之上,且能够在所述横向通槽的范围内横向运动。
优选地,所述基体的两侧设有夹紧部,以实现当所述垂向升降部带动第一料盒下降时,夹持位于第一料盒上方的第二料盒;
所述夹紧部包括横杆,所述横杆固定连接第一垂向前挡块,所述横杆设有能够沿所述横杆滑动的第二垂向前挡块;还包括与所述横杆相连且位于所述基体外侧的滑移杆,所述滑移杆连接有用以供所述横杆朝向所述基体方向移动的夹紧电机,所述横杆与所述基体之间还设有位置固定的后挡块。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
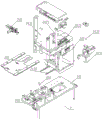
图1为本发明实施例所提供的焊线机的整体结构示意图;
图2为图1中的送线器的正面结构示意图;
图3为图1中的送线器的背面结构示意图;
图4为图1中的送线器的线圈固定座的动力部分的结构示意图;
图5为图1中的送线器的过线模块的背面结构示意图;
图6为图5的正面结构示意图;
图7为图6的后模块的结构示意图;
图8为图1中的邦头的结构示意图;
图9为图8中工作平台的结构示意图;
图10为图8中邦头模组的结构示意图;
图11为图10中柔性支点的结构示意图;
图12为图11的正视图;
图13为图1中的上料机构的示意图;
图14为图1中工作台的连接机构的示意图;
图15为图1中的下料机构的示意图;
图16为图13中具有料盒时的示意图;
图17为图13的正视图;
图18为图17的爆炸示意图;
图19为图17中基体的结构示意图;
图20为图17中推板部的结构示意图;
图21为图17中推板部的内部结构示意图;
图22为图17中夹紧部的结构示意图;
图23为图17中垂直升降部的结构示意图;
图24为图17中放料板与推料叉子的结构示意图;
图25为图17中料盒感应部所在位置的结构示意图;
图26为图15的爆炸示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
为了使本技术领域的技术人员更好地理解本发明方案,下面结合附图和具体实施方式对本发明作进一步的详细说明。
本发明提供的一种焊线机,如附图1所示,包括机架1,机架1设有上料机构2、工作台3和下料机构4;上料机构2、工作台3和下料机构4沿横向依次设置,位于工作台3的纵向两侧设置显微镜6和邦头5,邦头5可以实现对工作台3处的待加工部件进行焊接,显微镜6位于工作台3的外侧,便于供操作人员观察焊线过程。超声波发生器9与温度控制器8均作用于邦头5,确保焊线过程的顺利进行。
为了实现焊线过程的连续性,还可以设置送线器7,用以连续不断的提供焊线;其中,上述各个部件的具体设置方式均可参考现有技术;本发明的焊线机采用如此布局方式,能够实现焊线过程的全自动,上料与下料过程均为自动,操作人员仅仅通过显微镜6观察即可,简化了劳动强度,方便了焊线加工。
其中,送线器7可以包括安装板705,安装板705沿垂向设置,如说明书附图2与附图3所示。安装板705的两面可以定义为工作面和背面,其中安装有线圈固定座703、过线杆708和过线模组706的一面为工作面,另一面为背面。
线圈固定座703能够沿水平轴线转动,过线杆708的轴线水平设置,沿着送线方向依次为线圈固定座703、过线杆708和过线模组706;也即焊线依次经过线圈固定座703、过线杆708和过线模组706;过线模组706可以通过连接件707固定于安装板705的工作面;过线模组706的位置可以调节,连接件707可以为伸缩杆等部件,以方便过线模组706上下高度可调,以适应不同工作场景。此外,安装板705的工作面也应设有绝缘层。
线圈固定座703能够顺时针或逆时针旋转,从而将焊线送至过线杆708,焊线从过线杆708的下端引出,进入至过线模组706的过线通道中,过线通道的前端设有吹气孔7065,用以张紧焊线的张力;其中,过线杆708与过线通道中与焊线接触的部分均应抛光,避免焊线被割损。过线通道内还设有光纤检测部7062,用以检测焊线的摆动;线圈固定座703与动力源709相连,动力源709可以为电机等部件,当动力源709旋转后,线圈固定座703带动线圈旋转;光纤检测部7062与动力源709连通;当光纤检测部7062检测到焊线摆动时,控制动力源709开启,进而实现线圈固定座703的旋转;具体来说,在焊接过程中,随着焊线的使用,焊线变短,当需要继续进行焊接时,往往需要拉拽焊线,此时光纤检测部7062能够检测到焊线出现小幅度的摆动,一旦检测到该摆动,动力源709开始运行,带动线圈固定座703旋转,而线圈固定座703的旋转进而实现上述送线,当旋转至一定角度后,也即输送一定长度的焊线后,线圈固定座703在动力源709的作用下停止旋转,待下一次光纤检测部7062能够检测到焊线摆动后,再行旋转。
过线模组706包括可拆卸的前模块7063和后模块7064,如说明书附图5与附图6所示;前模块7063和后模块7064之间可以利用螺栓等部件连接,且两者之间具有预设间隙,过线通道位于两者的预设间隙中。吹气孔7065也应处于两者的预设间隙中,且位于前端的位置,如说明书附图7所述,而吹气孔7065应与储气箱7066连通,储气箱7066连通外接气管7061,以便外接气源依次经过外接气管7061、储气箱7066和吹气孔7065,并最终作用于焊线上,提升焊线的张力。
而吹气孔7065具体为上下两排能够沿送线方向吹气的吹气孔。采用两排吹气孔能够有效保证吹气的稳定均匀,且狭窄的过线通道消除了产生紊流的可能,进而增加了气流施加于焊线上的压力。
动力源709与线圈固定座703之间可以设置减速机构,动力源709的末端连接主动齿轮7091,从动齿轮7092与主动齿轮7091啮合,与从动齿轮7092连接的传动轴7093固定于线圈固定座703,如说明书附图4所示。主动齿轮7091与从动齿轮7092的端面应设有绝缘层,传动轴7093的前端与线圈固定座703相连,主动齿轮7091、传动轴7093与线圈固定座703同步转动,且动力源709与传动轴7093的旋转轴线平行。线圈固定座703的外侧设有第一固定块701,当线圈固定座703逆时针旋转并送线时固定焊线线尾;线圈固定座703的内侧设有第二固定块702,当线圈固定座703顺时针旋转并送线时固定焊线线尾,如说明书附图2所示;附图3中,传动轴7093的末端设有导电模块7094,导电模块7094连接接地线,接地线与第一固定块701和第二固定块702连通,用以降低触电的风险。第一固定块701与第二固定块702均固定于线圈固定座703,当线圈固定座703旋转时,第一固定块701与第二固定块702带动焊线同步旋转,进而实现送线的功能。第一固定块701与第二固定块702的设置方式可以参考现有技术,本文不再赘述。
线圈固定座703的内侧还设有用以张紧线圈的张力弹片704,张力弹片704与线圈固定座703固定连接,且张力弹片704与第二固定块702处于不同位置,张力弹片704类似于夹子,将线圈紧紧固定于线圈固定座703。
针对线圈固定座的动力部分,如说明书附图4所示;主动齿轮7091的外侧设有安装柱7090,主动齿轮7091能够在安装柱7090所围成的区域内旋转,动力源709与安装柱7090固定连接,主动齿轮7091相对于动力源709和安装柱7090旋转;安装柱7090的端面设有螺纹孔,可以通过螺栓等紧固部件将安装柱7090固定于安装板705的背面,进而实现固定动力源709的目的,这样即为完成动力源709的固定;在动力源709的作用下实现线圈固定座703的旋转,进而完成送线操作。
针对邦头5,其可以包括机体5200,机体5200设有第一Y轴平台5018、第二Y轴平台503、邦头模组5100、风扇5300、镜头5700、镜筒5600、相机5400和视觉定位模组5500;除此之外,还可以设有LED灯罩5800和定位档条5900,如说明说附图8与附图9所示。定位档条5900可拆卸地设于X轴平台502两侧,在运输过程中限制X轴平台502的移动,在正常工作时将其拆除。
第一Y轴平台5018的长度较长,且能够沿Y轴方向运动;第二Y轴平台503的长度较短,同样能够沿Y轴方向运动;第一Y轴平台5018与第二Y轴平台503之间具有直线滑轨5036,第一Y轴平台5018与第二Y轴平台503均与直线滑轨5036连接,在直线滑轨5036的作用下,可以实现第一Y轴平台5018与第二Y轴平台503的运动。
第二Y轴平台503的下方还设有X轴平台502;X轴平台502可以通过X轴导轨5039实现沿X轴方向的运动,且直线电机线圈5045用以提供动力;第二Y轴导轨5037用以供第二Y轴平台503沿Y轴运动;第二Y轴直线电机504对第二Y轴平台503提供Y轴移动的动力;第二Y轴平台503、X轴平台502与第二Y轴导轨5037均可以设于XY基体5020上,而XY基体5020可以看做是机体5200的一部分。为了检测移动的距离,本发明可以采用X轴光栅尺5044检测第二X轴导轨5039的移动距离。
邦头模组5100包括能够上下旋转的换能器524;邦头模组5100的顶部依次设有沿Y轴方向延伸的镜头700、镜筒600、相机5400和视觉定位模组5500。其中,镜头5700、镜筒5600、相机5400和视觉定位模组5500的设置方式可以参考现有技术,本文不再赘述。
位于直线电机线圈5045的一侧可以设有侧边风扇5023,用以对直线电机线圈5045散热;当然,风扇5300可以设于第一Y轴平台5018的第一Y轴导轨5028的末端,以便对第一Y轴平台5018的动力装置进行散热。第一Y轴平台5018的下方设有第一交叉导轨5038,第一Y轴平台5018的上方设有固定于所述第一交叉导轨5038且沿X轴向延伸的横档杆5015,所述横档杆5015的一侧设有限位部5012,所述横档杆5015的另一侧设有锁止部5027。
可以利用螺栓501等紧固件将第一交叉导轨5038固定于机体5200,且位于直线滑轨5036的上方设有与第一Y轴平台5018固定连接的盖板5019。盖板5019的一侧还可以设有第一导线部5033第二导线部5034,用以避免焊线的走线无序。X轴平台502的两侧还可以设有左盖板508、右盖板5025以及大盖板5031,用以将X轴平台502的两侧固定于机体5200;当然,上述部件的具体形状构造可以根据实际需要而定,本文不再赘述。
针对邦头模组5100的设置方式,本发明给出如下实施方式:邦头基体56作为基准件,其可以为箱体结构,具有一定的强度,如说明书附图10所示。
邦头基体56的前端具有向外侧突出的支架,支架类似于支耳设置,支耳具有通孔,通孔内固定连接柔性支点522;邦头基体56与支架可以51一体成型设置。
换能器524朝向邦头基体56的前端延伸,用于焊线;邦头架53呈7字形,邦头架53的底端铰接于柔性支点522,邦头架53可以相对于邦头基体56及其支架旋转,换能器524固定于邦头架53,也即换能器524能够相对于邦头基体56及其支架旋转,进而调节换能器524前端的工作位置的高低。
打火杆517设于换能器524的一侧,且打火杆517的末端相对于邦头架53位置固定;换能器524的工作端与打火杆517的工作端紧邻设置。也即换能器524的前端与打火杆517的前端相互靠近,共同完成焊线操作。由于换能器524与打火杆517的旋转角度较小,并且在焊线过程中,换能器524与地面保持水平,因此换能器524的运动近似为垂向运动;如此设置,可以实现换能器524的上下位置调节,进而完成不同需求的焊线操作。
为了实现换能器524的旋转,本发明可以在邦头架53的末端设有用以供邦头架53旋转的音圈电机529,如说明书附图10所示。
其中,音圈电机529应包括音圈定子、音圈动子以及电机磁铁组件528等;音圈电机529中的线圈在磁场中通电产生安培力,实现邦头架53的旋转,进而带动打火杆517与换能器524的旋转。当打火杆517与换能器524在受到音圈电机529所施加的外力时能够旋转,而当音圈电机529停止工作,不施加外力时则打火杆517与换能器524能够回复至原有位置。音圈电机529的具体形状构造可以参考现有技术。换能器524与邦头架53之间还可以设有固定座51,邦头架53的顶部呈镂空结构,减轻重量,而镂空结构下方设置固定座51,固定座51与邦头架53固定连接,换能器524的末端固定连接于固定座51;邦头架53的一侧还可以设有导线槽54,导线槽54沿着焊线进给的方向延伸,用以避免制焊接的走线杂乱无章。
针对柔性支点522,本发明可以采用如下设置方式;如说明书附图10所示,销轴支点512可以实现邦头架53与邦头基体56的铰接;说明书附图11与附图12所示的柔性支点522的结构,能够进一步提高铰接质量。柔性支点522包括固定于支架的圆柱侧壁5220,圆柱侧壁5220卡接于支架的通孔中,圆柱侧壁5220的内部具有两个相互连接且半径不同的中空部,如附图12所示。半径较小的中空部设有第一叉体5222和第二叉体5223,第一叉体5222和第二叉体5223均为弹性件,可以具有一定的形变量,且能够在外力消除后恢复至原状。
第一叉体5222和第二叉体5223朝向半径较大的中空部方向延伸、且第一叉体222和第二叉体223交叉设置;第一叉体5222贯穿第二叉体5223的通孔;与邦头架53固定连接的半圆环5221设于所述第一叉体5222与第二叉体5223的顶端,且半圆环5221处于半径较大的所述中空部内;第一叉体5222能够相对于所述第二叉体5223的通孔摆动。
圆柱侧壁5220、半圆环5221、第一叉体5222和第二叉体5223为一体成型设置;在音圈电机529的作用下,邦头架53旋转,带动第一叉体5222在小范围内旋转,且第一叉体5222的旋转范围仅限于第二叉体5223的通孔内,此时半圆环5221相对于圆柱侧壁5220旋转,而圆柱侧壁5220固定不动;当音圈电机529停止运行时,则第一叉体5222回复至原状,进而带动邦头架53回复至初始位置;如此设置的柔性支点522,在受到音圈电机529所施加的外力时能够旋转,而当音圈电机529停止工作,不施加外力时则打火杆517与换能器524能够回复至原有位置。
邦头基体56还可以设有用以限制邦头架53的旋转角度的限位挡块52,限位挡块52位于邦头架53的下方。也即,邦头架53向下旋转时,位于邦头架53下方的限位挡块52能够限制邦头架53的向下旋转,避免邦头架53过度向下旋转。邦头架53还设有位于换能器524下方的架体垂向支柱513,架体垂向支柱513能够随着邦头架53的旋转而转动;架体垂向支柱513设有光栅尺525;邦头基体56设有位于限位挡块52下方的基体垂向支柱57,基体垂向支柱57设有用以感应光栅尺旋转角度的光栅感应片523。
也即,邦头基体56、基体垂向支柱57和光栅感应片523的相对位置固定不动,而邦头架53、架体垂向支柱513与光栅尺525相对于邦头基体56旋转;利用光栅感应片523与光栅尺525的相对位置变化,能够检测邦头架53的旋转角度,进而确保邦头架53的旋转可靠。
本发明的变幅杆还包括用以固定打火杆517的打火杆固定座516,打火杆固定座516固定于支架组件515,打火杆支撑件514与支架组件515之间通过垂向固定块519连接。上述各个部件的作用是固定打火杆517,其形状构造可以根据实际需要而定,本文不再赘述。
如说明书附图10所示,位于邦头基体56的顶端,其一侧还可以设置边缘线架520,边缘线架520具有两个边,呈折弯状,设于邦头基体56的边角位置;边缘线架520的下方还设有下线架521,边缘线架520与下线架521位于邦头基体56的同一侧壁;邦头基体56的顶端处还可以设置清洗部55,清洗部55位于边缘线架520的减重孔处,暴露与外界。除此之外,位于音圈电机529的末端还设有安装支耳59,用于将音圈电机529与邦头架53安装于邦头基体56;安装支耳59的顶部设有垂直于安装支耳59的竖向立柱58,安装支耳59的底部设有止锁橡胶510,止锁橡胶510垂向设置,与邦头基体56的侧壁贴合,避免相对位置运动。金具527位于竖向立柱58的上方,从而将音圈电机529与邦头基体56固定到位。位于打火杆517一侧,支架组件515的上方还可以设置顶部固定块511与夹持部526,用以实现支架组件515与邦头基体56的固定可靠。
针对上料机构2与下料机构4,位于上料机构2与下料机构4之间的连接机构24200包括呈水平的滑轨24260,用以供晶架2498滑移;上料机构2与下料机构4均能够沿垂向滑动,且上料机构2设有与下料机构4均具有用以放置晶架2398的料盒2399,如说明书附图13至附图16所示。
连接机构24200具有用以进行焊线操作的工作台3;工作台3可以为滑轨24260中的一部分;滑轨24260的A处为上料机构2,滑轨24260的B处为下料机构4;连接机构24200的输送部能够将滑轨24260上的晶架2498由A处移动至B处;且晶架2498停留至工作台3时,能够实现焊线也即打线操作。
上料机构2与下料机构4均包括承载台241、基体242、垂向升降部243以及推料叉子244,此外,上料机构还包括推板部245;需要说明的是,上料机构2与下料机构4的形状构造类似,区别仅仅在于上料机构2还包括设于垂向升降部3外侧用以将料盒内的晶架推送至连接机构24200的推板部。而经打线后的晶架由连接机构24200的输送部送至下料机构4的料盒2499内;无论是上料机构2的料盒还是下料机构4的料盒,两个料盒的形状构造相同。
承载台241可以类似桌子的形状构造,基体242呈矩形框状;如说明书附图19所示。基体242作为基准,基体242的前端设有垂向升降部243,垂向升降部243能够与料盒2499同步上下运动,也即垂向升降部243与料盒2499相对于基体242同步运动;推料叉子244能够相对于承载台241朝向承载台241的外侧移动,进而将位于承载台241之上的料盒2499送至承载台241之外。
工作过程为,首先上料机构2的料盒2499内盛满待打线的晶架2498,料盒2499位于滑轨24260的A处,且料盒2499的高度高于滑轨24260的高度;而后在垂向升降部243的作用下料盒2499向下运动,当料盒2499内位于最底端的晶架2498的高度与滑轨24260的高度齐平时,垂向升降部243与料盒2499停止运行;然后利用推板部245将料盒2499内位于最底端的晶架2498推出至滑轨24260的最左端,如说明书附图14所示的左端;接着在连接机构24200的输送部的作用下,将晶架2498送至工作台,完成焊线后,由输送部送至下料机构4的料盒2499内;该晶架2498位于下料机构4的料盒2499的最底端;最后,下料机构4的料盒2499在垂向升降部(这里的垂向升降部是下料机构4的垂向升降部,不同于上料机构2的垂向升降部243)的作用下将下料机构4的料盒2499下降一定距离,下料机构4的料盒2499由下自上依次装满。
当上料机构2的料盒2499内没有待打线的晶架2498时,则利用垂向升降部243将空的料盒2499送至承载台241之上,推料叉子244将空的料盒2499移出承载台241之外;与之类似地,当下料机构4的料盒2499装满后,下料机构4的料盒2499在垂向升降部(这里的垂向升降部是下料机构4的垂向升降部,不同于上料机构2的垂向升降部243)的作用下将下料机构4的料盒2499送至承载台241之上,推料叉子(这里的推料叉子是下料机构4的推料叉子,不同于上料机构2的推料叉子244)将空的料盒2499移出承载台241之外。如附图13至附图15所示。
其中,推板部245的运动方向即为滑轨24260的延伸方向,而推料叉子244的运动方向与滑轨24260的延伸方向在同一平面内垂直;且上料机构2与下料机构4相对于连接机构24200对称设置;针对连接机构24200的设置方式,输送部可以包括输送电机24210、输送丝杠24220、输送连杆24230、第一夹持手臂24240和第二夹持手臂24250,如说明书附图14所示;输送电机24210带动输送丝杠24220旋转,进而实现输送连杆24230沿滑轨24260的延伸方向滑移,且输送连杆24230的两端固定有第一夹持手臂24240和第二夹持手臂24250,第一夹持手臂24240和第二夹持手臂24250的夹持与放松可以参考现有技术;也即,第一夹持手臂24240和第二夹持手臂24250可以夹持住晶架2498后,在输送丝杠24220的作用下,由A处移动至B处,第二夹持手臂24250的右端还设有输送末端,用以将晶架2498顶进下料机构4的料盒2499内。
上述垂向升降部243可以包括直线电机2431以及与直线电机2431相连的垂向杆2432;垂向杆2432固定连接有用以承托基体242的升降叉2433,如说明书附图18与附图23所示。直线电机2431作为动力来源,带动垂向杆2432旋转,其中垂向杆2432可以为丝杠;连接块2434设于垂向杆2432,能够在垂向杆2432的转动下实现垂向运动,升降叉2433与连接块2434固定连接,进而完成上下滑移。
在上述工作过程中,升降叉2433拖住料盒2499的底部,进而带动料盒2499上下运动;当升降叉2433运动至最底端时,则料盒2499放置于承载台241之上,而此时推料叉子244位于料盒2499中靠近基体242的一侧,当推料叉子244朝向基体242的外侧移动时,即可将料盒2499推出承载台241之外。
推板部245还可以包括推料杆2451与推料电机2452,推料电机2452的输出轴与所述推料杆2451之间通过滑动摩擦相连,如说明书附图20与附图21所示。
推板安装架2450可以固定于基体242的边框,推料杆2451的移动方向上设有滑槽2453,推料杆2451在滑槽2453内滑移;盖板2454能遮盖住推料电机2452,推料杆2451位于推料电机2452的输出轴上方,两者为滑动摩擦,当推料杆2451的推出遇到阻力时,推料杆2451与推料电机2452的输出轴之间便会打滑,避免推料杆2451和/或晶架2498的损毁。位于推料杆2451的上下两层还具有上压轮2458与下压轮2457,沿推料杆2451的滑移方向还设有第一导向块2455与第二导向块2456,用以确保推料杆2451的滑移可靠。推料杆2451的前端还可以设有V形头部24510,保证被推的晶架2498完全与推料杆2451相接触。
本发明的送料装置还包括设于所述承载台241的放料板246,放料板246位于所述基体242的前端;所述推料叉子244垂直于所述放料板246,所述推料叉子244连接有用以实现所述推料叉子244水平推移的动力部2441。放料板246相对于承载台241固定不动,且放料板246位于升降叉2433的下方;升降叉2433运动至最底端时,则升降叉2433承托的料盒2499位于放料板246之上;也即升降叉2433能够运动至放料板246的下方,进而将升降叉2433所承托的料盒2499由放料板246拖住,而后由推料叉子244水平推移位于放料板246上的料盒2499。放料板246可以设有多个横向通槽,所述推料叉子244伸出于横向通槽之上,且能够在所述横向通槽的范围内横向运动,如说明书附图18、附图24与附图25所示。
以附图24为例,升降叉2433运动至最底端时,升降叉2433承托的料盒2499位于放料板246之上,此时料盒2499位于推料叉子244的左侧,而后推料叉子244向右侧运动,进而将料盒2499推出至承载台241之外。
其中,推料叉子244的运动可以通过推料电机2441所驱动,推料电机2441位于左侧(以附图25为例),右侧为从动轴,推料电机2441与从动轴之间通过皮带传输动力,皮带设有推料叉子244,还可以设有用以限制推料叉子244的推料导向块,用以确保推料叉子244的运动方向。料盒感应部248可以位于推料电机2441的一侧,用来检测料盒2499是否落入放料板246上;当然,料盒感应部248的具体设置方式可以参考现有技术。
基体242的两侧设有夹紧部247,以实现当垂向升降部243带动第一料盒下降时,夹持位于第一料盒上方的第二料盒;
夹紧部247包括横杆2470,横杆2470固定连接第一垂向前挡块2471,横杆2470设有能够沿横杆2470滑动的第二垂向前挡块2472;还包括与所述横杆2470相连且位于所述基体242外侧的滑移杆2473,滑移杆2473连接有用以供所述横杆2470朝向所述基体242方向移动的夹紧电机2474,横杆2470与基体242之间还设有位置固定的后挡块2475。也即,两根后挡块2475相对于基体242的位置固定不动,第一垂向前挡块2471、第二垂向前挡块2472、横杆2470能够在滑移杆2473与夹紧电机2474的作用朝向基体242方向移动,也即第二垂向前挡块2472与后挡块2475之间的间隙减小;第一垂向前挡块2471、第二垂向前挡块2472和两根后挡块2475形成料盒通道;而由上述可知,料盒2499位于放料板246的正上方,也即料盒2499处于第一垂向前挡块2471、第二垂向前挡块2472、横杆2470和两根后挡块2475所围成的区域内。
在上述加工过程中,料盒2499由升降叉2433所承托;然而当料盒2499内的晶架2498用完时(针对上料机构2来说),需要将内部没有晶架2498的料盒2499(可以称之为第一料盒)放置承载台241之上,以便由推料叉子244推出;然而位于该料盒2499(也即第一料盒)之上的第二料盒(第二料盒内部装满待打线的晶架2498)需要保持在一定高度,而夹紧部247的第一垂向前挡块2471、第二垂向前挡块2472和两根后挡块2475能够夹持住第二料盒的四个侧边,将第二料盒保持在预设高度,此时升降叉2433先将第一料盒送至承载台241之上,而后升降叉2433返回至第二料盒处,承托第二料盒,而后第一垂向前挡块2471、第二垂向前挡块2472和横杆2470在夹紧电机2474的作用下向前移动,也即增大了横杆2470与后挡块2475之间的距离,放松第二料盒,第二料盒完全由升降叉2433承托,并重复上述步骤。当然,第一垂向前挡块2471可以在调节旋钮2476的作用下调节第一垂向前挡块2471与第二垂向前挡块2472之间的间隙,以便适应不同规格尺寸的料盒。而针对下料机构4的形状构造可以参考附图14,本文不再赘述。
需要说明的是,在本说明书中,诸如第一和第二之类的关系术语仅仅用来将一个实体与另外几个实体区分开来,而不一定要求或者暗示这些实体之间存在任何这种实际的关系或者顺序。
以上对本发明所提供的焊线机进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
Claims (8)
1.一种焊线机,包括机架,其特征在于,还包括设于所述机架、且沿所述机架的横向依次设置的上料机构、工作台和下料机构,所述工作台的纵向两侧分别设有显微镜以及用以进行焊线的邦头,所述显微镜设于所述工作台的外侧;所述邦头具有用以控制所述工作台温度的温度控制器,还包括设于所述邦头用以供焊线进给的送线器;
所述邦头包括机体(5200),所述机体(5200)设有长度较长、且能够沿Y轴方向运动的第一Y轴平台(5018)以及长度较短、且能够沿Y轴方向运动的第二Y轴平台(503),所述第一Y轴平台(5018)与所述第二Y轴平台(503)均连接有位于两者之间的直线滑轨(5036);
所述第二Y轴平台(503)的下方还设有X轴平台(502);所述X轴平台(502)可通过X轴导轨(5039)实现沿X轴方向运动,所述第二Y轴平台(503)的上方固定连接有用以焊线的邦头模组(5100),所述邦头模组(5100)包括能够上下旋转的换能器(524);所述邦头模组(5100)的顶部依次设有沿Y轴方向延伸的镜头(5700)、镜筒(5600)、相机(5400)和视觉定位模组(5500);
所述邦头模组(5100)还包括邦头基体(56),所述邦头基体(56)的前端具有向外侧突出的支架,所述支架设有柔性支点(522),邦头架(53)铰接于所述柔性支点(522);向前端延伸的所述换能器(524)固定连接于所述邦头架(53),且所述邦头架(53)还固定有位于所述换能器(524)一侧的打火杆(517),所述换能器(524)的工作端与所述打火杆(517)的工作端紧邻设置,所述邦头架(53)的末端设有用以供所述邦头架(53)旋转的音圈电机;
所述邦头基体(56)设有用以限制所述邦头架(53)的旋转角度的限位挡块(52),所述限位挡块(52)位于所述邦头架(53)的下方;所述换能器(524)下方设有架体垂向支柱(513),所述架体垂向支柱(513)设有光栅尺(525);所述限位挡块(52)下方设有基体垂向支柱(57),所述基体垂向支柱(57)设有用以感应所述光栅尺(525)旋转角度的光栅感应片(523)。
2.根据权利要求1所述的焊线机,其特征在于,所述送线器包括沿垂向设置的安装板(705),所述安装板(705)设有可水平转动的线圈固定座(703)以及位于所述线圈固定座(703)一侧的过线杆(708),固定于所述安装板(705)的过线模组(706)沿送线方向设于所述过线杆(708)的一侧;所述过线模组(706)具有用以供焊线通过的过线通道,且位于所述过线通道的前端设有用以张紧焊线张力的吹气孔(7065),所述过线通道内还设有用以检测焊线摆动的光纤检测部(7062),所述光纤检测部(7062)与用以控制所述线圈固定座(703)旋转的动力源(709)相连,以实现当所述光纤检测部(7062)检测到焊线摆动时,控制所述动力源(709)开启实现所述线圈固定座(703)的旋转。
3.根据权利要求1所述的焊线机,其特征在于,所述第一Y轴平台(5018)的下方设有第一交叉导轨(5038),所述第一Y轴平台(5018)的上方设有固定于所述第一交叉导轨(5038)且沿X轴向延伸的横档杆(5015),所述横档杆(5015)的一侧设有限位部(5012),所述横档杆(5015)的另一侧设有锁止部(5027)。
4.根据权利要求3所述的焊线机,其特征在于,位于所述直线滑轨(5036)的上方设有与所述第一Y轴平台(5018)固定连接的盖板(5019)。
5.根据权利要求1~4任意一项所述的焊线机,其特征在于,所述上料机构与所述下料机构均包括:
承载台(241);
设于所述承载台(241)上方的基体(242);所述基体(242)呈矩形框状;
设于所述承载台(241)且与所述基体(242)相连用以供料盒向下运动的垂向升降部(243),所述垂向升降部(243)位于所述基体(242)前端;
设于所述承载台(241)用以将位于所述垂向升降部(243)的料盒推出于所述垂向升降部(243)的推料叉子(244);
所述上料机构还包括设于所述垂向升降部(243)外侧用以将料盒内的晶架推送至连接机构的推板部(245)。
6.根据权利要求5所述的焊线机,其特征在于,还包括设于所述承载台(241)的放料板(246),所述放料板(246)位于所述基体(242)的前端;所述推料叉子(244)垂直于所述放料板(246),所述推料叉子(244)连接有用以实现所述推料叉子(244)水平推移的动力部(2441)。
7.根据权利要求6所述的焊线机,其特征在于,所述放料板(246)设有多个横向通槽,所述推料叉子(244)伸出于所述横向通槽之上,且能够在所述横向通槽的范围内横向运动。
8.根据权利要求7所述的焊线机,其特征在于,所述基体(242)的两侧设有夹紧部(247),以实现当所述垂向升降部(243)带动第一料盒下降时,夹持位于第一料盒上方的第二料盒;
所述夹紧部(247)包括横杆(2470),所述横杆(2470)固定连接第一垂向前挡块(2471),所述横杆(2470)设有能够沿所述横杆(2470)滑动的第二垂向前挡块(2472);还包括与所述横杆(2470)相连且位于所述基体(242)外侧的滑移杆(2473),所述滑移杆(2473)连接有用以供所述横杆(2470)朝向所述基体(242)方向移动的夹紧电机(2474),所述横杆(2470)与所述基体(242)之间还设有位置固定的后挡块(2475)。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710537745.5A CN107160050B (zh) | 2017-07-04 | 2017-07-04 | 一种焊线机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710537745.5A CN107160050B (zh) | 2017-07-04 | 2017-07-04 | 一种焊线机 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107160050A CN107160050A (zh) | 2017-09-15 |
| CN107160050B true CN107160050B (zh) | 2023-03-24 |
Family
ID=59822659
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710537745.5A Active CN107160050B (zh) | 2017-07-04 | 2017-07-04 | 一种焊线机 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN107160050B (zh) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107870643B (zh) * | 2017-10-26 | 2020-02-07 | 合肥超越电器有限责任公司 | 一种侧向隐藏式升降机构的温度控制器 |
| CN109047976B (zh) * | 2018-10-15 | 2021-01-05 | 唐明 | 穿线焊接机 |
| TWI690001B (zh) * | 2018-12-07 | 2020-04-01 | 日月光半導體製造股份有限公司 | 機台裝置、製程設備及製程設備之作動方法 |
| CN110125507B (zh) * | 2019-06-20 | 2021-05-07 | 深圳市晶封存储科技有限公司 | 一种全自动pcba板焊线的方法 |
| CN114619183A (zh) * | 2022-04-21 | 2022-06-14 | 恩纳基智能科技无锡有限公司 | 一种邦头焊线机构 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1773688A (zh) * | 2005-10-24 | 2006-05-17 | 中国电子科技集团公司第四十五研究所 | 轻质高刚度xy工作台及键合头 |
| CN101625989A (zh) * | 2008-07-08 | 2010-01-13 | 深圳市大族精密机电有限公司 | 送扯线装置及其方法 |
| CN201801231U (zh) * | 2010-07-30 | 2011-04-20 | 深圳市翠涛自动化设备有限公司 | 一种焊线机用自动放线装置 |
| CN202622227U (zh) * | 2012-06-27 | 2012-12-26 | 邹志峰 | 一种稳定移动的焊线机焊头安装平台 |
| CN203187073U (zh) * | 2013-03-05 | 2013-09-11 | 深圳市森力普电子有限公司 | 一种上料装置 |
| CN203456421U (zh) * | 2013-03-01 | 2014-02-26 | 广东工业大学 | 用于全自动引线键合设备上的键合头装置 |
| CN103612036A (zh) * | 2013-11-13 | 2014-03-05 | 深圳市综科邦达机电设备有限公司 | 焊线机 |
| CN204321405U (zh) * | 2014-07-18 | 2015-05-13 | 宋勇飞 | 模条及超声波金丝球焊线机 |
| CN207205594U (zh) * | 2017-07-04 | 2018-04-10 | 东莞市凯格精密机械有限公司 | 一种焊线机 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6616030B2 (en) * | 2001-05-07 | 2003-09-09 | West Bond, Inc. | Gantry mounted ultrasonic wire bonder with orbital bonding tool head |
-
2017
- 2017-07-04 CN CN201710537745.5A patent/CN107160050B/zh active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1773688A (zh) * | 2005-10-24 | 2006-05-17 | 中国电子科技集团公司第四十五研究所 | 轻质高刚度xy工作台及键合头 |
| CN101625989A (zh) * | 2008-07-08 | 2010-01-13 | 深圳市大族精密机电有限公司 | 送扯线装置及其方法 |
| CN201801231U (zh) * | 2010-07-30 | 2011-04-20 | 深圳市翠涛自动化设备有限公司 | 一种焊线机用自动放线装置 |
| CN202622227U (zh) * | 2012-06-27 | 2012-12-26 | 邹志峰 | 一种稳定移动的焊线机焊头安装平台 |
| CN203456421U (zh) * | 2013-03-01 | 2014-02-26 | 广东工业大学 | 用于全自动引线键合设备上的键合头装置 |
| CN203187073U (zh) * | 2013-03-05 | 2013-09-11 | 深圳市森力普电子有限公司 | 一种上料装置 |
| CN103612036A (zh) * | 2013-11-13 | 2014-03-05 | 深圳市综科邦达机电设备有限公司 | 焊线机 |
| CN204321405U (zh) * | 2014-07-18 | 2015-05-13 | 宋勇飞 | 模条及超声波金丝球焊线机 |
| CN207205594U (zh) * | 2017-07-04 | 2018-04-10 | 东莞市凯格精密机械有限公司 | 一种焊线机 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107160050A (zh) | 2017-09-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107160050B (zh) | 一种焊线机 | |
| US8522423B2 (en) | Method and device for feeding and attaching corrective elements for unbalance correction, in particular in a balancing machine | |
| JP6284540B2 (ja) | 電子部品装着装置 | |
| JP7220035B2 (ja) | 帯鋸盤 | |
| CN109530948B (zh) | 一种罐体焊接机器人 | |
| KR101518025B1 (ko) | 모터컨트롤러부품 자동용접장치 | |
| WO2019178955A1 (zh) | 一种多层砂纸过程纠偏装置 | |
| CN210451293U (zh) | 一种用于电感生产的自动焊锡装置 | |
| JP6259464B2 (ja) | 電子部品装着装置 | |
| CN204802539U (zh) | 一种自动摆料设备 | |
| CN109746598A (zh) | 一种保温杯吸气剂焊接装置 | |
| CN113241571A (zh) | 一种导线的自动焊接设备 | |
| CN109048534A (zh) | 一种汽车刹车片双侧倒角机 | |
| CN113714632A (zh) | 一种圆锯片激光焊接设备 | |
| CN105681997B (zh) | 一种耳机自动化焊接装置及方法 | |
| CN110620006B (zh) | 一种绕线设备 | |
| CN207205594U (zh) | 一种焊线机 | |
| CN210615463U (zh) | 一种埋弧自动焊用磁性固定导向装置 | |
| CN211310120U (zh) | 一种用于机械加工的自动送料机构 | |
| CN115971602A (zh) | 一种集成电路板自动钎焊装置 | |
| CN211469707U (zh) | 一种定位装置 | |
| CN207057830U (zh) | 一种焊线机及其焊线控制系统 | |
| CN216298217U (zh) | 一种陶瓷发热体引脚的焊接设备 | |
| CN211804280U (zh) | 自动焊锡设备 | |
| CN212634868U (zh) | 一种焊接滑台 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| CB02 | Change of applicant information |
Address after: 523000 2 Sha long road, Dongcheng Street, Dongguan, Guangdong Applicant after: Dongguan Kaige Precision Machinery Co.,Ltd. Address before: 523000 Guangdong city of Dongguan province Dongcheng District Sharon Road No. 2 Applicant before: GKG PRECISION MACHINE Co.,Ltd. |
|
| CB02 | Change of applicant information | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |