CN106993588B - 电动绕线轮 - Google Patents
电动绕线轮 Download PDFInfo
- Publication number
- CN106993588B CN106993588B CN201710057028.2A CN201710057028A CN106993588B CN 106993588 B CN106993588 B CN 106993588B CN 201710057028 A CN201710057028 A CN 201710057028A CN 106993588 B CN106993588 B CN 106993588B
- Authority
- CN
- China
- Prior art keywords
- clutch
- return
- gear
- rotation
- switching mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 138
- 230000005540 biological transmission Effects 0.000 claims description 15
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- 238000004804 winding Methods 0.000 description 3
- 210000000078 claw Anatomy 0.000 description 2
- 230000002401 inhibitory effect Effects 0.000 description 2
- 229910000838 Al alloy Inorganic materials 0.000 description 1
- 238000004512 die casting Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 229920003002 synthetic resin Polymers 0.000 description 1
- 239000000057 synthetic resin Substances 0.000 description 1
Images

Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; CARE OF BIRDS, FISHES, INSECTS; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K89/00—Reels
- A01K89/015—Reels with a rotary drum, i.e. with a rotating spool
- A01K89/017—Reels with a rotary drum, i.e. with a rotating spool motor-driven
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; CARE OF BIRDS, FISHES, INSECTS; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K89/00—Reels
- A01K89/01—Reels with pick-up, i.e. with the guiding member rotating and the spool not rotating during normal retrieval of the line
- A01K89/0108—Pick-up details
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; CARE OF BIRDS, FISHES, INSECTS; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K89/00—Reels
- A01K89/01—Reels with pick-up, i.e. with the guiding member rotating and the spool not rotating during normal retrieval of the line
- A01K89/0111—Spool details
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; CARE OF BIRDS, FISHES, INSECTS; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K89/00—Reels
- A01K89/01—Reels with pick-up, i.e. with the guiding member rotating and the spool not rotating during normal retrieval of the line
- A01K89/01121—Frame details
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Environmental Sciences (AREA)
- Animal Husbandry (AREA)
- Biodiversity & Conservation Biology (AREA)
Abstract
本发明目的是使离合器断开状态的离合器机构迅速地成为离合器接通状态。返回机构(10)借助马达及手柄的旋转使离合器切换机构(9)成为离合器接通位置。返回机构(10)具有返回齿轮(101)和返回卡合部(102)。返回齿轮(101)随着马达及手柄的旋转而旋转。返回卡合部(102)在离合器切换机构(9)处于离合器断开位置时,与返回齿轮(101)卡合。返回卡合部(102)在离合器切换机构(9)处于离合器接通位置时,与返回齿轮(101)的卡合解除。返回卡合部(102)借助返回齿轮(101)的旋转,使离合器切换机构成为离合器接通位置。
Description
技术领域
本发明涉及电动绕线轮。
背景技术
电动绕线轮具有手柄、马达、卷筒及离合器机构(参照专利文献1)。当离合器机构为离合器接通状态时,能够在手柄及马达与卷筒之间传递旋转。当离合器机构为离合器断开状态时,手柄及马达与卷筒之间的旋转的传递被切断。因此,在离合器断开状态时,卷筒能够自由旋转。
当将钓线向卷筒卷取时,使离合器机构成为离合器接通状态,借助手柄或马达的旋转,使卷筒旋转而将钓线卷取。另一方面,当将钓线从卷筒放出时,使离合器机构成为离合器断开状态,使卷筒自由旋转,将钓线放出。
专利文献1:日本特开2013-21969号公报。
发明内容
在上述那样的电动绕线轮中,希望迅速地使离合器机构从离合器断开状态成为离合器接通状态。所以,本发明的目的是使离合器断开状态的离合器机构迅速成为离合器接通状态。
涉及本发明的一技术方案的电动绕线轮具备绕线轮主体、手柄、卷筒、卷筒轴、马达、旋转传递机构、离合器机构、离合器切换机构和返回机构。手柄能够旋转地安装在绕线轮主体上。卷筒能够旋转地支承在绕线轮主体上。卷筒轴在卷筒内沿轴向延伸。卷筒轴能够旋转地支承在绕线轮主体上。马达使卷筒旋转。旋转传递机构将马达及手柄的旋转向卷筒传递。离合器机构能够取使卷筒能够自由旋转的离合器断开状态、以及使卷筒能够进行线卷取的离合器接通状态。离合器切换机构能够取使离合器机构成为离合器断开状态的离合器断开位置、以及使离合器机构成为离合器接通状态的离合器接通位置。返回机构借助马达及手柄的旋转,使离合器切换机构成为离合器接通位置。返回机构具有返回齿轮和返回卡合部。返回齿轮随着马达及手柄的旋转而旋转。返回卡合部在离合器切换机构处于离合器断开位置时,与返回齿轮卡合。此外,返回卡合部在离合器切换机构处于离合器接通位置时,与返回齿轮的卡合解除。返回卡合部借助返回齿轮的旋转,使离合器切换机构成为离合器接通位置。
根据上述方案,返回齿轮既随着手柄的旋转而旋转,也随着马达的旋转而旋转。并且,借助这样的手柄及马达的旋转而返回齿轮旋转,返回卡合部使离合器切换机构成为离合器接通位置。因此,如果当离合器机构为离合器断开状态时使手柄及马达旋转,则返回卡合部使离合器切换机构成为离合器接通位置,离合器机构成为离合器接通状态。这样,涉及本发明的电动绕线轮仅通过使手柄或马达旋转,就能够使离合器断开状态的离合器机构成为离合器接通状态。因此,能够使离合器断开状态的离合器机构迅速地成为离合器接通状态。
优选的是,旋转传递机构具有第1齿轮和第2齿轮。第1齿轮借助马达的旋转及手柄的旋转而被旋转驱动。第2齿轮与第1齿轮啮合。返回齿轮与第2齿轮一体地旋转。
优选的是,旋转传递机构还具有绕卷筒轴旋转的小齿轮。第2齿轮及返回齿轮配置在第1齿轮与小齿轮之间。
优选的是,第2齿轮与小齿轮啮合。
优选的是,离合器切换机构通过绕卷筒轴摆动,在离合器接通位置与离合器断开位置之间切换。返回卡合部借助返回齿轮的旋转,使离合器切换机构摆动而成为离合器接通位置。
优选的是,返回卡合部与离合器切换机构一起绕卷筒轴摆动。
优选的是,返回卡合部具有抵接部。抵接部在离合器切换机构处于离合器断开位置时被配置在返回齿轮的各齿之间。如果返回齿轮旋转,则抵接部被返回齿轮的齿从各齿之间推出,与返回齿轮的卡合解除。
根据本发明,能够迅速地使离合器断开状态的离合器机构成为离合器接通状态。
附图说明
图1是电动绕线轮的俯视图。
图2是电动绕线轮的后视图。
图3是电动绕线轮的侧视图。
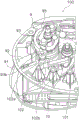
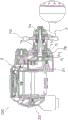
图4是图3的IV-IV线剖视图。
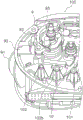
图5是表示第1绕线轮主体部的内部的立体图。
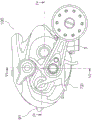
图6是图3的VI-VI线剖视图。
图7是表示第1绕线轮主体部的内部的立体图。
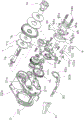
图8是电动绕线轮的分解立体图。
具体实施方式
以下,参照附图对涉及本发明的电动绕线轮的实施方式进行说明。另外,在以下的说明中,所谓轴向,是指卷筒的旋转轴延伸的方向。此外,所谓轴向的内侧,是指在轴向上接近于卷筒4的一侧。所谓轴向的外侧,是指在轴向上从卷筒4远离的一侧。此外,所谓前方,是指钓线放出的方向。
如图1至图3所示,电动绕线轮100具备绕线轮主体2、手柄3、卷筒4。此外,如图4及图5所示,电动绕线轮100具备卷筒轴5、马达6、旋转传递机构7、离合器机构8、离合器切换机构9及返回机构10。
[绕线轮主体]
如图4所示,绕线轮主体2具备第1绕线轮主体部21和第2绕线轮主体部22。第1绕线轮主体部21和第2绕线轮主体部22在轴向上相互隔开间隔配置。详细地讲,第1绕线轮主体部21配置在卷筒4的第1端部侧,第2绕线轮主体部22配置在卷筒4的第2端部侧。第1绕线轮主体部21和第2绕线轮主体部22相互经由连结部23连结。
第1绕线轮主体部21具有第1侧板21a和第1罩21b。第1绕线轮主体部21在内部具有收容空间。该收容空间由第1侧板21a和第1罩21b围成。
第2绕线轮主体部22具有第2侧板22a和第2罩22b。第2侧板22a经由连结部23而与第1侧板21a连接。该第1侧板21a、第2侧板22a和连结部23一体地形成,构成绕线轮主体2的框架。例如,第1侧板21a、第2侧板22a及连结部23用铝合金借助压铸成形一体地形成。
第2绕线轮主体部22具有支承部22c。支承部22c安装在第2侧板22a及第2罩22b的至少一方上。支承部22c经由轴承等支承着卷筒轴5及马达6。
[手柄]
手柄3能够旋转地安装在绕线轮主体2上。详细地讲,手柄3能够旋转地安装在第1绕线轮主体部21上。通过使手柄3旋转,使卷筒4旋转。
[卷筒]
卷筒4能够旋转地配置在第1绕线轮主体部21与第2绕线轮主体部22之间。卷筒4安装在卷筒轴5上,与卷筒轴5一体地旋转。例如,卷筒4和卷筒轴5借助花键嵌合等安装,使得相互不能相对旋转。
卷筒4具有卷线躯干部41、第1凸缘部42、第2凸缘部43。卷线躯干部41是圆筒形状,在旋转轴向上延伸。在卷线躯干部41的外周面上卷绕钓线。
第1凸缘部42及第2凸缘部43从卷线躯干部41的两端部向径向外侧延伸。详细地讲,第1凸缘部42形成在卷线躯干部41的第1绕线轮主体部21侧的端部上。此外,第2凸缘部43形成在卷线躯干部41的第2绕线轮主体部22侧的端部上。
[卷筒轴]
卷筒轴5经由轴承部件能够旋转地支承在第1绕线轮主体部21及第2绕线轮主体部22上。详细地讲,卷筒轴5的一个端部经由轴承部件支承在第1绕线轮主体部21的第1罩21b上。此外,卷筒轴5的另一个端部经由轴承部件支承在第2绕线轮主体部22的支承部22c上。
[马达]
马达6构成为,将卷筒4旋转驱动。马达6配置在第1绕线轮主体部21与第2绕线轮主体部22之间。此外,马达6配置在卷筒4的前方。马达6的输出轴61延伸到第1绕线轮主体部21内。马达6的输出轴61在轴向上延伸。
马达6具有倒转禁止部62。由该倒转禁止部62限制马达6向线放出方向旋转。
[旋转传递机构]
旋转传递机构7被收容在第1绕线轮主体部21的收容空间内。旋转传递机构7是将手柄3及马达6的旋转向卷筒4等传递的机构。如图4及图6所示,旋转传递机构7具有驱动轴7a、驱动齿轮7b、第1行星齿轮机构7c、第2行星齿轮机构7d、第1齿轮7e、第2齿轮7f、第3齿轮7g及小齿轮7h等。此外,旋转传递机构7还具有牵引机构7i、第1单向离合器7j及第2单向离合器7k。
如图6所示,驱动轴7a在轴向上延伸,与手柄3一体地旋转。驱动齿轮7b能够相对旋转地安装在驱动轴7a上。驱动轴7a被第1单向离合器7j及第2单向离合器7k限制线放出方向的旋转。
在驱动轴7a上,安装着第1单向离合器7j的棘轮71j。将棘轮71j以与驱动轴7a一体旋转的方式安装。此外,棘轮71j以在轴向上不向卷筒4侧移动的方式安装在驱动轴7a上。借助棘爪(图示省略)使得棘轮71j不向线放出方向旋转。
牵引机构7i具有多个牵引垫片71i、及星形牵引部72i。各牵引垫片以与驱动轴7a一体旋转的方式安装在驱动轴7a上。牵引机构7i构成为,当不到设定值的牵引力作用在卷筒4上时,将卷筒向线放出方向的旋转制动。另外,如果设定值以上的牵引力作用在卷筒4上,则卷筒4向线放出方向空转。
如图4所示,第1行星齿轮机构7c安装在马达6的输出轴61上。此外,第2行星齿轮机构7d也安装在马达6的输出轴61上。第1及第2行星齿轮机构7c、7d将马达6的旋转减速而向卷筒4等传递。
第1行星齿轮机构7c的恒星齿轮以与输出轴61一体旋转的方式安装在输出轴61上。第2行星齿轮机构7d的恒星齿轮以与第1行星齿轮机构7c的行星架一体地旋转的方式安装在第1行星齿轮机构7c的行星架上。此外,第2行星齿轮机构7d的恒星齿轮能够相对于输出轴61相对旋转。
第1及第2行星齿轮机构7c、7d被收容在第1齿轮7e的内部中。第1齿轮7e是圆筒状,在第1绕线轮主体部21内被能够旋转地支承。在第1齿轮7e的外周面及内周面上形成有齿。形成在该第1齿轮7e的内周面上的齿与第1行星齿轮机构7c的行星齿轮及第2行星齿轮机构7d的行星齿轮啮合。
第3齿轮7g与驱动齿轮7b啮合。此外,第3齿轮7g以与第2行星齿轮机构7d的行星架一体地旋转的方式安装在第2行星齿轮机构7d的行星架上。即,第3齿轮7g的旋转经由第2行星齿轮机构7d的行星架向第1齿轮7e传递。
第2齿轮7f与第1齿轮7e啮合。详细地讲,第2齿轮7f与形成在第1齿轮7e的外周面上的齿啮合。第2齿轮7f还与小齿轮7h啮合。因此,第1齿轮7e的旋转经由第2齿轮7f向小齿轮7h传递。
小齿轮7h配置在第1绕线轮主体部21内。小齿轮7h在轴向上延伸。小齿轮7h经由轴承部件支承在第1绕线轮主体部21上。此外,小齿轮7h能够在轴向上移动。详细地讲,小齿轮7h具有在轴向上延伸的贯通孔,卷筒轴5在该贯通孔内延伸。并且,小齿轮7h能够在卷筒轴5上沿轴向滑动。
小齿轮7h具有能够与卡合销81卡合的卡合凹部82。卡合凹部82形成在小齿轮7h的第2绕线轮主体部22侧的端部上。
[离合器机构]
离合器机构8可切换为离合器接通状态和离合器断开状态。当离合器机构8为离合器接通状态时,使卷筒4能够进行线卷取。即,当离合器机构8为离合器接通状态时,在手柄3或马达6与卷筒4之间传递旋转。当离合器机构8为离合器断开状态时,上述旋转的传递被切断。即,当离合器机构8为离合器断开状态时,卷筒4能够自由旋转。
离合器机构8由卡合销81和卡合凹部82构成。卡合销81安装在卷筒轴5上。卡合销81嵌合在卷筒轴5的贯通孔中,卡合销81的两端部从卷筒轴5在径向上突出。卡合凹部82是形成在小齿轮7h上的凹部。卡合凹部82构成为,与卡合销81卡合。
通过小齿轮7h向远离第2绕线轮主体部22的方向移动,卡合销81与卡合凹部82的卡合被解除。结果,小齿轮7h能够与卷筒轴5相对旋转。即,离合器机构8成为离合器断开状态。另一方面,通过小齿轮7h向接近第2绕线轮主体部22的方向移动,卡合销81与卡合凹部82卡合。结果,小齿轮7h能够与卷筒轴5一体旋转。即,离合器机构8成为离合器接通状态。
[离合器切换机构]
离合器切换机构9能够取离合器断开位置和离合器接通位置。如图5所示,当离合器切换机构9处于离合器断开位置时,离合器切换机构9使离合器机构8成为离合器断开状态。即,当离合器切换机构9处于离合器断开位置时,离合器切换机构9使小齿轮7h向远离第2绕线轮主体部22的方向移动,将卡合销81与卡合凹部82的卡合解除。
如图7所示,当离合器切换机构9处于离合器接通位置时,离合器切换机构9使离合器机构8成为离合器接通状态。即,当离合器切换机构9处于离合器接通位置时,离合器切换机构9使小齿轮7h向接近第2绕线轮主体部22的方向移动,使卡合销81与卡合凹部82卡合。
离合器切换机构9通过以旋转轴O为中心摆动,在离合器接通位置与离合器断开位置之间切换。如图8所示,离合器切换机构9具备离合器操作部件91、底板92、离合器凸轮93、推压板94及离合器拨叉95。
离合器操作部件91是用来切换离合器机构8的状态的部件。使用用者通过操作离合器操作部件91,将离合器机构8的状态在离合器接通状态与离合器断开状态之间切换。离合器操作部件91能够以旋转轴O为中心摆动。
离合器操作部件91配置在卷筒4的后方。此外,离合器操作部件91在第1绕线轮主体部21与第2绕线轮主体部22之间延伸。当使用者以推下的方式操作离合器操作部件91时,离合器切换机构9成为离合器断开位置,使离合器机构8成为离合器断开状态。
离合器操作部件91安装在底板92上。底板92在第1绕线轮主体部21与第2绕线轮主体部22之间延伸。底板92被第1引导槽211和第2引导槽221能够滑动地支承。另外,第1引导槽211形成在第1绕线轮主体部21的第1侧板21a上,在周向上延伸。此外,第2引导槽221形成在第2绕线轮主体部22的第2侧板22a上,在周向上延伸。
底板92具有装配部92a。装配部92a是装配在绕线轮主体2上的部分。装配部92a能够旋转地装配在绕线轮主体2上。详细地讲,装配部92a装配在安装板21c上。安装板21c固定在第1侧板21a上。安装板21c具有凸台部21d。凸台部21d是圆筒状,向轴向的外侧突出。装配部92a在中央部具有开口。通过在该装配部92a的开口内插入凸台部21d,将装配部92a能够旋转地装配到凸台部21d上。
离合器凸轮93与底板92连动而旋转。离合器凸轮93能够以旋转轴O为中心旋转地配置。离合器凸轮93能够旋转地安装在安装板21c上。详细地讲,离合器凸轮93在中央部具有开口。通过在该开口中插入安装板21c的凸台部21d,将离合器凸轮93能够旋转地装配在凸台部21d上。
离合器凸轮93具有凸轮面93a及突出部93b。凸轮面93a构成为,将离合器拨叉95向轴向的外侧推压。具体而言,从轴向的外侧观察,如果离合器凸轮93逆时针旋转,则凸轮面93a将离合器拨叉95向轴向的外侧推压,离合器拨叉95向轴向的外侧移动。离合器凸轮93例如是合成树脂制。
突出部93b是向半径方向外侧突出的部分。后述的返回卡合部102装配在突出部93b上。详细地讲,突出部93b具有安装孔931,返回卡合部102的销102a插入在安装孔931内。
离合器凸轮93还具有卡合凸部93c。卡合凸部93c向轴向的内侧突出。该卡合凸部93c与底板92的卡合孔92b卡合。借助该卡合,底板92和离合器凸轮93以旋转轴O为中心一体地旋转。
推压板94配置在底板92及离合器凸轮93的各开口部内。推压板94固定在安装板21c上。推压板94具有在轴向上延伸的多个销94a。各销94a向轴向的外侧延伸。
离合器拨叉95被推压板94能够沿轴向移动地支承。详细地讲,离合器拨叉95在与各销94a对应的位置上具有贯通孔95a。通过在该各贯通孔95a中插入各销94a,离合器拨叉95能够沿轴向移动地被支承。
离合器拨叉95具有凸轮卡合部95b。通过凸轮面93a与该离合器拨叉95的凸轮卡合部95b卡合,离合器拨叉95被向轴向的外侧推压。
离合器拨叉95构成为,与小齿轮7h的颈缩部71h卡合。因此,小齿轮7h与离合器拨叉95连动而沿轴向移动。另外构成为,即使小齿轮7h旋转,离合器拨叉95也不旋转。离合器拨叉95被施力部件向轴向的内侧施力。详细地讲,多个线圈弹簧94b对离合器拨叉95向轴向的内侧施力。另外,线圈弹簧94b被推压板94的各销94a支承。
在通常状态下,离合器拨叉95被各线圈弹簧94b向轴向的内侧施力。因此,小齿轮7h的卡合凹部82与卷筒轴5的卡合销81卡合。即,离合器机构8将手柄3及马达6与卷筒4连结。相对于此,如果操作离合器切换机构9而使离合器拨叉95向轴向的外侧移动,则小齿轮7h也向轴向的外侧移动,小齿轮7h的卡合凹部82与卡合销81的卡合脱离。结果,离合器机构8将手柄3及马达6与卷筒4的连结切断。
[返回机构]
如图5所示,返回机构10是借助手柄3及马达6的旋转使离合器切换机构9成为离合器接通位置的机构。返回机构10具有返回齿轮101和返回卡合部102。
返回齿轮101随着手柄3及马达6的旋转而旋转。即,返回齿轮101既随着手柄3的旋转而旋转,也随着马达6的旋转而旋转。详细地讲,返回齿轮101在第1绕线轮主体部21内被能够旋转地支承。此外,返回齿轮101与第2齿轮7f一体地旋转。例如,返回齿轮101被固定在第2齿轮7f上。返回齿轮101既可以粘接在第2齿轮7f上,也可以与第2齿轮7f一体地形成。
如图5所示,当离合器切换机构9处于离合器断开位置时,返回卡合部102卡合在返回齿轮101上。另一方面,如图7所示,当离合器切换机构9处于离合器接通位置时,返回卡合部102与返回齿轮101的卡合解除。返回卡合部102借助返回齿轮101的旋转,使离合器切换机构9成为离合器接通位置。
如图5所示,返回卡合部102被安装在离合器凸轮93的突出部93b上。返回卡合部102能够与离合器凸轮93一起以旋转轴O为中心摆动。例如,返回卡合部102具有销102a,该销102a插入在离合器凸轮93的安装孔931内。返回卡合部102也可以能够相对于离合器凸轮93摆动地安装。
返回卡合部102被触发弹簧(トグルばね)102c(参照图8)向摆动方向的两个方向分配地施力。返回卡合部102具有爪部102b。当返回卡合部102卡合在返回齿轮101上时,爪部102b的前端部被配置在返回齿轮101的各齿之间。另外,该爪部102b的前端部相当于本发明的抵接部。
如果随着手柄3及马达6的旋转而返回齿轮101旋转,则返回卡合部102的爪部102b被返回齿轮101的齿向后方推压。由此,返回卡合部102以旋转轴O为中心摆动,离合器切换机构9从离合器断开位置向离合器接通位置返回。
详细地讲,随着返回卡合部102的摆动,离合器凸轮93以旋转轴O为中心旋转。由此,由离合器凸轮93的凸轮面93a进行的离合器拨叉95的推压解除。如果由凸轮面93a进行的推压解除,则离合器拨叉95在线圈弹簧94b的作用力下向轴向的内侧移动。结果,小齿轮7h向轴向的内侧移动,卡合销81与卡合凹部82卡合,小齿轮7h能够与卷筒轴5一体旋转。即,离合器机构8从离合器断开状态成为离合器接通状态。
以上,根据涉及本实施方式的电动绕线轮100,如果手柄3及马达6的某一方旋转,则经由返回机构10及离合器切换机构9,离合器机构8成为离合器接通状态。因此,能够使离合器断开状态的离合器机构8迅速地成为离合器接通状态。
[变形例]
以上,对本发明的实施方式进行了说明,但本发明并不限定于这些,只要不脱离本发明的主旨就能够进行各种各样的变更。例如,旋转传递机构7也可以是与上述实施方式不同的结构。此外,在上述实施方式中,返回齿轮101具有多个齿,但并不特别限定于此。例如,返回齿轮101也可以仅具有1个齿。
附图标记说明
2:绕线轮主体
3:手柄
4:卷筒
5:卷筒轴
6:马达
7:旋转传递机构
7e:第1齿轮
7f:第2齿轮
7h:小齿轮
8:离合器机构
9:离合器切换机构
10:返回机构
100:电动绕线轮
101:返回齿轮
102:返回卡合部
Claims (9)
1.一种电动绕线轮,其特征在于,
具备:
绕线轮主体;
手柄,能够旋转地安装在前述绕线轮主体上;
卷筒,能够旋转地支承在前述绕线轮主体上;
卷筒轴,在前述卷筒内沿轴向延伸,能够旋转地支承在前述绕线轮主体上;
马达,使前述卷筒旋转;
旋转传递机构,将前述马达及手柄的旋转向前述卷筒传递;
离合器机构,能够取使前述卷筒能够自由旋转的离合器断开状态、以及使前述卷筒能够进行线卷取的离合器接通状态;
离合器切换机构,能够取使前述离合器机构成为前述离合器断开状态的离合器断开位置、以及使前述离合器机构成为前述离合器接通状态的离合器接通位置;
返回机构,借助前述马达及手柄的旋转,使前述离合器切换机构成为前述离合器接通位置;
前述返回机构具有:
返回齿轮,随着前述马达及手柄的旋转而旋转;
返回卡合部,当前述离合器切换机构处于前述离合器断开位置时,与前述返回齿轮卡合,当前述离合器切换机构处于前述离合器接通位置时,与前述返回齿轮的卡合解除;
前述返回卡合部借助前述返回齿轮的旋转,使前述离合器切换机构成为前述离合器接通位置。
2.如权利要求1所述的电动绕线轮,其特征在于,
前述旋转传递机构具有:
第1齿轮,借助前述马达的旋转及前述手柄的旋转而被旋转驱动;
第2齿轮,与前述第1齿轮啮合;
前述返回齿轮与前述第2齿轮一体地旋转。
3.如权利要求2所述的电动绕线轮,其特征在于,
前述旋转传递机构还具有绕前述卷筒轴旋转的小齿轮;
前述第2齿轮及前述返回齿轮配置在前述第1齿轮与前述小齿轮之间。
4.如权利要求3所述的电动绕线轮,其特征在于,
前述第2齿轮与前述小齿轮啮合。
5.如权利要求1~4中任一项所述的电动绕线轮,其特征在于,
前述离合器切换机构通过绕前述卷筒轴摆动,在前述离合器接通位置与前述离合器断开位置之间切换;
前述返回卡合部借助前述返回齿轮的旋转,使前述离合器切换机构摆动而成为前述离合器接通位置。
6.如权利要求5所述的电动绕线轮,其特征在于,
前述返回卡合部与前述离合器切换机构一起绕前述卷筒轴摆动。
7.如权利要求1~4中任一项所述的电动绕线轮,其特征在于,
前述返回卡合部具有抵接部,当前述离合器切换机构处于前述离合器断开位置时,所述抵接部被配置在前述返回齿轮的各齿之间;
如果前述返回齿轮旋转,则前述返回卡合部的抵接部被前述返回齿轮的齿从前述各齿之间推出,与前述返回齿轮的卡合解除。
8.如权利要求5所述的电动绕线轮,其特征在于,
前述返回卡合部具有抵接部,当前述离合器切换机构处于前述离合器断开位置时,所述抵接部被配置在前述返回齿轮的各齿之间;
如果前述返回齿轮旋转,则前述返回卡合部的抵接部被前述返回齿轮的齿从前述各齿之间推出,与前述返回齿轮的卡合解除。
9.如权利要求6所述的电动绕线轮,其特征在于,
前述返回卡合部具有抵接部,当前述离合器切换机构处于前述离合器断开位置时,所述抵接部被配置在前述返回齿轮的各齿之间;
如果前述返回齿轮旋转,则前述返回卡合部的抵接部被前述返回齿轮的齿从前述各齿之间推出,与前述返回齿轮的卡合解除。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016012478A JP6836324B2 (ja) | 2016-01-26 | 2016-01-26 | 電動リール |
| JP2016-012478 | 2016-01-26 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN106993588A CN106993588A (zh) | 2017-08-01 |
| CN106993588B true CN106993588B (zh) | 2021-06-22 |
Family
ID=59431444
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710057028.2A Active CN106993588B (zh) | 2016-01-26 | 2017-01-26 | 电动绕线轮 |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP6836324B2 (zh) |
| KR (1) | KR102611460B1 (zh) |
| CN (1) | CN106993588B (zh) |
| TW (1) | TWI719118B (zh) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108684621B (zh) * | 2018-07-26 | 2023-09-05 | 鹤山市仲德精密制造科技有限公司 | 一种可快速收线的渔线轮 |
| US11133591B2 (en) | 2018-12-20 | 2021-09-28 | Sharp Kabushiki Kaisha | Antenna device, position input device including antenna device, and display device including antenna device |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03102855U (zh) * | 1990-02-06 | 1991-10-25 | ||
| JPH11341939A (ja) * | 1998-03-31 | 1999-12-14 | Daiwa Seiko Inc | 魚釣用電動リール |
| CN1723775A (zh) * | 2004-07-23 | 2006-01-25 | 株式会社岛野 | 钓鱼用渔线轮的离合器复位装置 |
| JP2006174732A (ja) * | 2004-12-21 | 2006-07-06 | Daiwa Seiko Inc | 魚釣用電動リール |
| JP2007143448A (ja) * | 2005-11-25 | 2007-06-14 | Daiwa Seiko Inc | 魚釣用電動リール |
| JP2013021969A (ja) * | 2011-07-21 | 2013-02-04 | Globeride Inc | 魚釣用電動リール |
| CN103814873A (zh) * | 2012-11-19 | 2014-05-28 | 株式会社岛野 | 双轴承绕线轮 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07298812A (ja) * | 1994-05-11 | 1995-11-14 | Daiwa Seiko Inc | 魚釣用リ−ル |
| US5690667A (en) | 1996-09-26 | 1997-11-25 | Target Therapeutics | Vasoocclusion coil having a polymer tip |
| JP2001095442A (ja) | 1999-09-29 | 2001-04-10 | Daiwa Seiko Inc | 魚釣用リール |
| JP6518514B2 (ja) | 2015-05-28 | 2019-05-22 | 株式会社シマノ | 両軸受リール |
-
2016
- 2016-01-26 JP JP2016012478A patent/JP6836324B2/ja active Active
- 2016-11-25 KR KR1020160158261A patent/KR102611460B1/ko active IP Right Grant
-
2017
- 2017-01-17 TW TW106101554A patent/TWI719118B/zh active
- 2017-01-26 CN CN201710057028.2A patent/CN106993588B/zh active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03102855U (zh) * | 1990-02-06 | 1991-10-25 | ||
| JPH11341939A (ja) * | 1998-03-31 | 1999-12-14 | Daiwa Seiko Inc | 魚釣用電動リール |
| CN1723775A (zh) * | 2004-07-23 | 2006-01-25 | 株式会社岛野 | 钓鱼用渔线轮的离合器复位装置 |
| JP2006174732A (ja) * | 2004-12-21 | 2006-07-06 | Daiwa Seiko Inc | 魚釣用電動リール |
| JP2007143448A (ja) * | 2005-11-25 | 2007-06-14 | Daiwa Seiko Inc | 魚釣用電動リール |
| JP2013021969A (ja) * | 2011-07-21 | 2013-02-04 | Globeride Inc | 魚釣用電動リール |
| CN103814873A (zh) * | 2012-11-19 | 2014-05-28 | 株式会社岛野 | 双轴承绕线轮 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017131129A (ja) | 2017-08-03 |
| KR102611460B1 (ko) | 2023-12-08 |
| TWI719118B (zh) | 2021-02-21 |
| CN106993588A (zh) | 2017-08-01 |
| JP6836324B2 (ja) | 2021-02-24 |
| TW201729677A (zh) | 2017-09-01 |
| KR20170089399A (ko) | 2017-08-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI554207B (zh) | 雙軸承捲線器 | |
| TWI642356B (zh) | Double bearing reel | |
| JP5746841B2 (ja) | 両軸受リールのクラッチ制御装置 | |
| US8132651B2 (en) | Mechanical motor for toy planes | |
| JP2012065574A5 (zh) | ||
| TWI638604B (zh) | 雙軸承捲線器及雙軸承捲線器的離合機構 | |
| CN106172293B (zh) | 双轴承绕线轮 | |
| TWI714706B (zh) | 雙軸承捲線器的離合器控制機構 | |
| CN106993588B (zh) | 电动绕线轮 | |
| JP4381733B2 (ja) | 両軸受リール | |
| JP2016220570A5 (zh) | ||
| JP4097150B2 (ja) | 魚釣用電動リール | |
| CN110100802B (zh) | 双轴承渔线轮 | |
| JP2019129781A5 (zh) | ||
| JP6247115B2 (ja) | スピニングリール | |
| CN110506716B (zh) | 钓鱼用绕线轮的手柄返回位置调整机构 | |
| JP2015159757A5 (zh) | ||
| JP6914052B2 (ja) | 両軸受リール | |
| JP2019068775A (ja) | 両軸受リール | |
| JP7412294B2 (ja) | 釣り用リールのトルク制限装置及び釣り用リール | |
| JP2003259777A (ja) | 魚釣用リール | |
| CN117136920A (zh) | 双轴承绕线轮 | |
| JP2008125467A (ja) | 魚釣用電動リール | |
| JP4366232B2 (ja) | 電動リール | |
| TW201944891A (zh) | 雙軸承捲線器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |