CN106945467B - 一种车辆行走驱动方向导航机构 - Google Patents
一种车辆行走驱动方向导航机构 Download PDFInfo
- Publication number
- CN106945467B CN106945467B CN201710322876.1A CN201710322876A CN106945467B CN 106945467 B CN106945467 B CN 106945467B CN 201710322876 A CN201710322876 A CN 201710322876A CN 106945467 B CN106945467 B CN 106945467B
- Authority
- CN
- China
- Prior art keywords
- steering
- rotary
- differential mechanism
- driving motor
- gear
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 title claims abstract description 66
- 238000013016 damping Methods 0.000 claims abstract description 27
- 238000009434 installation Methods 0.000 claims description 15
- 229910000831 Steel Inorganic materials 0.000 claims description 5
- 239000010959 steel Substances 0.000 claims description 5
- 230000035939 shock Effects 0.000 abstract description 29
- 238000010521 absorption reaction Methods 0.000 abstract description 6
- 230000002035 prolonged effect Effects 0.000 abstract description 2
- 239000006096 absorbing agent Substances 0.000 description 23
- 238000000034 method Methods 0.000 description 3
- 238000005299 abrasion Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 241001391944 Commicarpus scandens Species 0.000 description 1
- 230000003139 buffering effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60B—VEHICLE WHEELS; CASTORS; AXLES FOR WHEELS OR CASTORS; INCREASING WHEEL ADHESION
- B60B33/00—Castors in general; Anti-clogging castors
- B60B33/0036—Castors in general; Anti-clogging castors characterised by type of wheels
- B60B33/0042—Double or twin wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60B—VEHICLE WHEELS; CASTORS; AXLES FOR WHEELS OR CASTORS; INCREASING WHEEL ADHESION
- B60B33/00—Castors in general; Anti-clogging castors
- B60B33/04—Castors in general; Anti-clogging castors adjustable, e.g. in height; linearly shifting castors
- B60B33/06—Castors in general; Anti-clogging castors adjustable, e.g. in height; linearly shifting castors mounted retractably
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0418—Electric motor acting on road wheel carriers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D7/00—Steering linkage; Stub axles or their mountings
- B62D7/06—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Retarders (AREA)
- Arrangement Of Transmissions (AREA)
Abstract
本发明公开了一种车辆行走驱动方向导航机构,包括行走驱动组件、转向驱动组件、减震组件和回转支撑安装架,行走驱动组件通过减震组件与转向驱动组件连接;减震组件设置在转向回转盘与差速器之间并将转向回转盘与差速器连接。本发明行走驱动轮在不平整的地面通过减震组件都能使行走轮与地面充分接触不至发生轮子悬空现象而出现打滑,在转向时差速器两端的行走驱动轮产生相对运动减小了轮子与地面的摩擦,增加了行走驱动轮的使用寿命。转向驱动马达通过转向回转盘齿轮与转向驱动齿轮使得本发明可实现车辆360°转向运行。本发明的减震功能能有效减小不同荷载的冲击,增强了整体装备的稳定性和使用寿命。
Description
技术领域
本发明属于车辆行走机构技术领域,具体涉及一种车辆行走驱动方向导航机构。
背景技术
纵观当今的车辆的方向导航方法有:1在车辆两侧的方向导向轮,通过拉杆将两个轮子连接在一起,通过方向驱动器转动方向,由于拉杆的作用使两个轮的转向同步一直,这些方法普遍存在以下共性问题,转向角度小,车辆转弯角度半径过大,并且受场地限制,有些时候无法转向。转向时,内侧与外侧轮子的转弯半径不一致,造成一侧轮子磨损过快,降低轮胎的使用寿命。2立轴结构,此结构荷载集中在中心点上,承受侧向冲击小极易发生轴基断裂,转动时轮子对地面为滑动摩擦其摩擦力非常大,对轮子的使用寿命有极大的影响,有时在不平整的地方出现悬空,轮子打滑现象。
发明内容
本发明要解决的是现有使用的车辆转向结构转向角度小,车轮磨损不均,轮胎使用寿命低等技术问题,从而提供一种车辆行走驱动方向导航机构,该机构为法兰盘状旋转结构可以实现360度旋转,并且承载荷载大结构性能稳定,并且轮子能左右上下浮动旋转调整,减小了路面不平整时对机构的冲击,提升了车辆通行的能力和使用寿命,而且在旋转时轮子与地面是滚动摩擦,轮胎磨损小。
为解决上述技术问题,本发明所采用的技术方案如下:
一种车辆行走驱动方向导航机构,包括行走驱动组件、转向驱动组件、减震组件和回转支撑安装架,行走驱动组件通过减震组件与转向驱动组件连接;所述行走驱动组件包括行走驱动电机、差速器和行走驱动轮,行走驱动电机安装在回转支撑安装架上,且行走驱动电机的输出轴向下穿过回转支撑安装架与差速器连接,差速器的两个输出轴分别与行走驱动轮连接;所述转向驱动组件包括转向驱动马达、转向回转盘和转向驱动齿轮,转向驱动马达安装在回转支撑安装架上且转向驱动马达的输出轴通过转向驱动齿轮与转向回转盘上的转向回转盘齿轮相啮合;转向回转盘安装在回转支撑安装架上;减震组件设置在转向回转盘与差速器之间并将转向回转盘与差速器连接。
所述转向驱动马达安装在回转支撑安装架上端面,转向驱动马达的输出轴向下穿过回转支撑安装架上的孔与转向驱动齿轮连接;转向回转盘套设在回转支撑安装架的下端面,且在转向回转盘的外圆周面上设置有转向回转盘齿轮。
所述减震组件包括减震器和减震器活塞轴,减震器对称安装在转向回转盘的两侧,减震器活塞轴的上端伸入减震器内并与减震器内的弹簧相接触;减震器活塞轴的下端套设在差速器外壳。
所述减震器活塞轴的下端设置有耳孔,耳孔的轴线与减震器活塞轴的轴线相垂直;在差速器外壳上设置有吊耳轴,吊耳轴的轴线与耳孔的轴线平行并与差速器的输出轴的轴线垂直;减震器活塞轴通过耳孔与差速器上的吊耳轴相配合将减震器活塞轴与差速器连接。减震器活塞轴在行走驱动轮受到荷载冲击产生减震运动,减震器活塞轴的横向耳孔可在两端行走驱动轮与地面高低不一致时以差速器的吊耳轴为轴旋转调节,使两端行走驱动轮高低浮动与地面充分接触。
所述转向驱动马达安装在回转支撑安装架下端面,转向驱动马达的输出轴向上穿过回转支撑安装架上的孔与转向驱动齿轮连接;转向回转盘的下部设置在回转支撑安装架内并绕回转支撑安装架转动,在转向回转盘上部的外圆周面上设置有转向回转盘齿轮,转向回转盘齿轮与转向驱动齿轮相啮合,在转向回转盘上端设有与其他机构相连接的工件安装孔。
在转向回转盘与回转支撑安装架的接触处设置有回转支撑钢球。回转支撑钢球的设置减小转向回转盘与回转支撑安装架的转动摩擦。
所述减震组件包括导向柱、弹性减震套和连接块,所述导向柱的上部设置有凸台,且导向柱的上端固定在回转支撑安装架下端面,导向柱的下端插入连接块内;弹性减震套套设在导向柱上且位于凸台与连接块之间;连接块铰接在差速器的外壳上。
所述连接块的上端面对称设置有导向柱安装孔,导向柱插入导向柱安装孔内;在连接块的前端面设置有吊耳安装孔,吊耳安装孔的轴线与导向柱安装孔的轴线垂直;在差速器的外壳上对称设置有吊耳轴,吊耳轴的轴线与吊耳安装孔的轴线平行并与差速器的输出轴的轴线垂直;连接块通过吊耳安装孔套设在吊耳轴上。
所述导向柱的下端安装有防脱垫板。
本发明行走驱动轮在不平整的地面通过减震组件都能使行走轮与地面充分接触不至发生轮子悬空现象而出现打滑,在转向时差速器两端的行走驱动轮产生相对运动减小了轮子与地面的摩擦,增加了行走驱动轮的使用寿命。转向驱动马达通过转向回转盘齿轮与转向驱动齿轮使得本发明可实现车辆360°转向运行。本发明的减震功能能有效减小不同荷载的冲击,增强了整体装备的稳定性和使用寿命。
附图说明
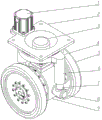
图1为实施例1的结构示意图。
图2为实施例1的主视图。
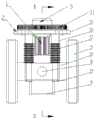
图3为图2的A-A剖视图。
图4为实施例2的结构示意图。
图5为实施例2的主视图。
图6为图5的B-B剖视图。
具体实施方式
实施例1:如图1-3所示,一种车辆行走驱动方向导航机构,包括行走驱动组件、转向驱动组件、减震组件和回转支撑安装架2,行走驱动组件通过减震组件与转向驱动组件连接。
所述行走驱动组件包括行走驱动电机3、差速器9和行走驱动轮5,行走驱动电机3安装在回转支撑安装架2上,且行走驱动电机3的输出轴向下穿过回转支撑安装架2与差速器9连接,差速器9的两个输出轴分别与行走驱动轮5连接。
所述转向驱动组件包括转向驱动马达1、转向回转盘4和转向驱动齿轮10,转向驱动马达1安装在回转支撑安装架2上且转向驱动马达1的输出轴通过转向驱动齿轮10与转向回转盘4上的转向回转盘齿轮11相啮合;转向回转盘4安装在回转支撑安装架2上并绕回转支撑安装架2转动;减震组件设置在转向回转盘4与差速器9之间并将转向回转盘4与差速器9连接。
具体地,所述转向驱动马达1安装在回转支撑安装架2上端面,转向驱动马达1的输出轴向下穿过回转支撑安装架2上的孔与转向驱动齿轮10连接;转向回转盘4套设在回转支撑安装架2的下端面,且在转向回转盘4的外圆周面上设置有转向回转盘齿轮11。
所述减震组件包括减震器6和减震器活塞轴7,减震器6对称安装在转向回转盘4的两侧,减震器活塞轴7的上端伸入减震器6内并与减震器6内的弹簧相接触;减震器活塞轴7的下端套设在差速器9外壳。
所述减震器活塞轴7的下端设置有耳孔7-1,耳孔7-1的轴线与减震器活塞轴7的轴线相垂直;在差速器9外壳上设置有吊耳轴8,吊耳轴8的轴线与耳孔7-1的轴线平行并与差速器9的输出轴的轴线垂直;减震器活塞轴7通过耳孔7-1与差速器9上的吊耳轴8相配合将减震器活塞轴7与差速器9连接。减震器活塞轴7在行走驱动轮5受到荷载冲击产生减震运动,减震器活塞轴7的横向耳孔可在两端行走驱动轮5与地面高低不一致时以差速器的吊耳轴8为轴旋转调节,使两端行走驱动轮5高低浮动与地面充分接触。
在实施例中,所述转向回转盘齿轮11可与转向回转盘4一体成型,减震器6也可与转向回转盘4一体成型。
工作过程:转向时,回转支撑安装架2用于与外部设备连接,转向驱动马达1带动转向驱动齿轮10转动,转向驱动齿轮10与转向回转盘齿轮11相啮合,使得转向回转盘齿轮11连同转向回转盘4一起绕回转支撑安装架2转动,安装在转向回转盘4侧端的减震器6和减震器活塞轴7一起随转向回转盘4转动,由于减震器活塞轴7的下端安装在差速器9的外壳上,所以减震器活塞轴7带动差速器9及其行走驱动轮5一起转动,而且转动角度为0~360度。
行走时,行走驱动电机3给差速器9输送动力,差速器9的输出轴带动行走驱动轮5进行行走。
在行走过程中,减震器活塞轴7与弹簧相配合实现缓冲作用。
实施例2:如图4-6所示,一种车辆行走驱动方向导航机构,包括行走驱动组件、转向驱动组件、减震组件和回转支撑安装架2,行走驱动组件通过减震组件与转向驱动组件连接。
所述行走驱动组件包括行走驱动电机3、差速器9和行走驱动轮5,行走驱动电机3安装在回转支撑安装架2上,且行走驱动电机3的输出轴向下穿过回转支撑安装架2与差速器9连接,差速器9的两个输出轴分别与行走驱动轮5连接。
所述转向驱动组件包括转向驱动马达1、转向回转盘4和转向驱动齿轮10,转向驱动马达1安装在回转支撑安装架2上且转向驱动马达1的输出轴通过转向驱动齿轮10与转向回转盘4上的转向回转盘齿轮11相啮合;转向回转盘4安装在回转支撑安装架2上并绕回转支撑安装架2转动;减震组件设置在转向回转盘4与差速器9之间并将转向回转盘4与差速器9连接。
具体地,所述转向驱动马达1安装在回转支撑安装架2下端面,转向驱动马达1的输出轴向上穿过回转支撑安装架2上的孔与转向驱动齿轮10连接;转向回转盘4的下部设置在回转支撑安装架2内并绕回转支撑安装架2转动,在转向回转盘4上部的外圆周面上设置有转向回转盘齿轮11,转向回转盘齿轮11与转向驱动齿轮10相啮合,在转向回转盘4上端设有与其他机构相连接的工件安装孔。
所述减震组件包括导向柱16、弹性减震套17和连接块18,所述导向柱16的上部设置有凸台,且导向柱16的上端固定在回转支撑安装架2下端面,导向柱16的下端插入连接块18内;弹性减震套17套设在导向柱16上且位于凸台与连接块18之间;连接块18铰接在差速器9的外壳上。
所述连接块18的上端面对称设置有导向柱安装孔,导向柱16插入导向柱安装孔内;在连接块18的前端面设置有吊耳安装孔18-1,吊耳安装孔18-1的轴线与导向柱安装孔的轴线垂直;在差速器9的外壳上对称设置有吊耳轴8,吊耳轴8的轴线与吊耳安装孔18-1的轴线平行并与差速器9的输出轴的轴线垂直;连接块18通过吊耳安装孔18-1套设在吊耳轴8上。
优选地,在转向回转盘4与回转支撑安装架2的接触处设置有回转支撑钢球20。回转支撑钢球20的设置减小转向回转盘4与回转支撑安装架2的转动摩擦。
进一步优选地,所述导向柱16的下端安装有防脱垫板19。
工作过程,转向时,转向回转盘4与外部设备连接,也就是说转向回转盘4与转向回转盘齿轮11是不动的,转向驱动马达1带动转向驱动齿轮10转动,转向驱动齿轮10与转向回转盘齿轮11相啮合,由于转向回转盘齿轮11和转向回转盘4是固定不动的,所以转向驱动齿轮10带着回转支撑安装架2围绕转向回转盘齿轮11转动,安装在回转支撑安装架2上的导向柱16随之转动,导向柱16带动连接块18一起转动,连接块18带动差速器9及行走驱动轮5转动,而且转动角度为0~360度。
行走时,行走驱动电机3给差速器9输送动力,差速器9的输出轴带动行走驱动轮5进行行走。
在行走过程中,弹性减震套17的伸缩实现缓冲作用。
Claims (5)
1.一种车辆行走驱动方向导航机构,其特征在于:包括行走驱动组件、转向驱动组件、减震组件和回转支撑安装架(2),行走驱动组件通过减震组件与转向驱动组件连接;所述行走驱动组件包括行走驱动电机(3)、差速器(9)和行走驱动轮(5),行走驱动电机(3)安装在回转支撑安装架(2)上,且行走驱动电机(3)的输出轴向下穿过回转支撑安装架(2)与差速器(9)连接,差速器(9)的两个输出轴分别与行走驱动轮(5)连接;所述转向驱动组件包括转向驱动马达(1)、转向回转盘(4)和转向驱动齿轮(10),转向驱动马达(1)安装在回转支撑安装架(2)上且转向驱动马达(1)的输出轴通过转向驱动齿轮(10)与转向回转盘(4)上的转向回转盘齿轮(11)相啮合;转向回转盘(4)安装在回转支撑安装架(2)上;减震组件设置在转向回转盘(4)与差速器(9)之间并将转向回转盘(4)与差速器(9)连接;所述减震组件包括减震器(6)和减震器活塞轴(7),减震器(6)对称安装在转向回转盘(4)的两侧,减震器活塞轴(7)的上端伸入减震器(6)内并与减震器(6)内的弹簧相接触;减震器活塞轴(7)的下端套设在差速器(9)外壳;所述减震器活塞轴(7)的下端设置有耳孔(7-1),耳孔(7-1)的轴线与减震器活塞轴(7)的轴线相垂直;在差速器(9)外壳上设置有吊耳轴(8),吊耳轴(8)的轴线与耳孔(7-1)的轴线平行并与差速器(9)的输出轴的轴线垂直;减震器活塞轴(7)通过耳孔(7-1)与差速器(9)上的吊耳轴(8)相配合将减震器活塞轴(7)与差速器(9)连接,所述转向回转盘齿轮(11)与转向回转盘(4)一体成型,减震器(6)也与转向回转盘(4)一体成型。
2.根据权利要求1所述的车辆行走驱动方向导航机构,其特征在于:所述转向驱动马达(1)安装在回转支撑安装架(2)上端面,转向驱动马达(1)的输出轴向下穿过回转支撑安装架(2)上的孔与转向驱动齿轮(10)连接;转向回转盘(4)套设在回转支撑安装架(2)的下端面,且在转向回转盘(4)的外圆周面上设置有转向回转盘齿轮(11)。
3.一种车辆行走驱动方向导航机构,其特征在于:包括行走驱动组件、转向驱动组件、减震组件和回转支撑安装架(2),行走驱动组件通过减震组件与转向驱动组件连接;所述行走驱动组件包括行走驱动电机(3)、差速器(9)和行走驱动轮(5),行走驱动电机(3)安装在回转支撑安装架(2)上,且行走驱动电机(3)的输出轴向下穿过回转支撑安装架(2)与差速器(9)连接,差速器(9)的两个输出轴分别与行走驱动轮(5)连接;所述转向驱动组件包括转向驱动马达(1)、转向回转盘(4)和转向驱动齿轮(10),转向驱动马达(1)安装在回转支撑安装架(2)上且转向驱动马达(1)的输出轴通过转向驱动齿轮(10)与转向回转盘(4)上的转向回转盘齿轮(11)相啮合;转向回转盘(4)安装在回转支撑安装架(2)上;减震组件设置在转向回转盘(4)与差速器(9)之间并将转向回转盘(4)与差速器(9)连接;在转向回转盘(4)与回转支撑安装架(2)的接触处设置有回转支撑钢球(20);所述减震组件包括导向柱(16)、弹性减震套(17)和连接块(18),所述导向柱(16)的上部设置有凸台,且导向柱(16)的上端固定在回转支撑安装架(2)下端面,导向柱(16)的下端插入连接块(18)内;弹性减震套(17)套设在导向柱(16)上且位于凸台与连接块(18)之间;连接块(18)铰接在差速器(9)的外壳上;所述连接块(18)的上端面对称设置有导向柱安装孔,导向柱(16)插入导向柱安装孔内;在连接块(18)的前端面设置有吊耳安装孔(18-1),吊耳安装孔(18-1)的轴线与导向柱安装孔的轴线垂直;在差速器(9)的外壳上对称设置有吊耳轴(8),吊耳轴(8)的轴线与吊耳安装孔(18-1)的轴线平行并与差速器(9)的输出轴的轴线垂直;连接块(18)通过吊耳安装孔(18-1)套设在吊耳轴(8)上。
4.根据权利要求3所述的车辆行走驱动方向导航机构,其特征在于:所述转向驱动马达(1)安装在回转支撑安装架(2)下端面,转向驱动马达(1)的输出轴向上穿过回转支撑安装架(2)上的孔与转向驱动齿轮(10)连接;转向回转盘(4)的下部设置在回转支撑安装架(2)内并绕回转支撑安装架(2)转动,在转向回转盘(4)上部的外圆周面上设置有转向回转盘齿轮(11),转向回转盘齿轮(11)与转向驱动齿轮(10)相啮合,在转向回转盘(4)上端设有与其他机构相连接的工件安装孔。
5.根据权利要求4所述的车辆行走驱动方向导航机构,其特征在于:所述导向柱(16)的下端安装有防脱垫板(19)。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710322876.1A CN106945467B (zh) | 2017-05-09 | 2017-05-09 | 一种车辆行走驱动方向导航机构 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710322876.1A CN106945467B (zh) | 2017-05-09 | 2017-05-09 | 一种车辆行走驱动方向导航机构 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN106945467A CN106945467A (zh) | 2017-07-14 |
| CN106945467B true CN106945467B (zh) | 2023-07-07 |
Family
ID=59479465
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710322876.1A Active CN106945467B (zh) | 2017-05-09 | 2017-05-09 | 一种车辆行走驱动方向导航机构 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN106945467B (zh) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108583727A (zh) * | 2018-05-23 | 2018-09-28 | 江苏集萃智能制造技术研究所有限公司 | 一种全地形救援救灾机器人 |
| CN111902296A (zh) * | 2018-09-21 | 2020-11-06 | 日本精工株式会社 | 驱动轮、台车和设备 |
| CN111319673A (zh) * | 2018-12-13 | 2020-06-23 | 沈阳新松机器人自动化股份有限公司 | 一种独立转向的驱动机构 |
| CN109528102A (zh) * | 2019-01-11 | 2019-03-29 | 浙江智澜科技有限公司 | 一种基于无人驾驶的园区智能清洗机器人 |
| CN110316279A (zh) * | 2019-05-24 | 2019-10-11 | 广州市中立智能装备科技有限公司 | 一种全向差分驱动舵轮 |
| CN110606142B (zh) * | 2019-08-15 | 2020-09-25 | 燕山大学 | 基于地面封闭的混联支腿及其移动调姿平台 |
| WO2021027572A1 (zh) * | 2019-08-15 | 2021-02-18 | 燕山大学 | 主被动差动混联支腿、基于重力封闭的混联支腿及六自由度调姿机器人平台 |
| CN110512673A (zh) * | 2019-08-29 | 2019-11-29 | 广东博智林机器人有限公司 | 整平机 |
| CN110562350A (zh) * | 2019-09-24 | 2019-12-13 | 曹昂 | 一种差速轮组结构的全方位八轮越野车 |
| CN110803216A (zh) * | 2019-10-25 | 2020-02-18 | 江苏金陵智造研究院有限公司 | 重载agv运输车用承载辅助转向轮系统及其转向控制方法 |
| CN111119537B (zh) * | 2020-02-17 | 2024-11-15 | 深圳精智机器有限公司 | 一种高承载整体式车辆搬运器 |
| CN111577759A (zh) * | 2020-04-29 | 2020-08-25 | 河南科技大学 | 一种具有自动补偿功能的大型转盘行走轮 |
| CN112282456B (zh) * | 2020-10-22 | 2022-05-20 | 深圳精智机器有限公司 | 重载车辆搬运器和方法 |
| CN112389540A (zh) * | 2020-12-11 | 2021-02-23 | 云南昆船智能装备有限公司 | 一种新型差速立式舵轮 |
| CN115370206A (zh) * | 2022-09-21 | 2022-11-22 | 广州广日智能停车设备有限公司 | 一种可旋转载车板结构 |
| CN116518969B (zh) * | 2023-04-25 | 2023-10-20 | 南京艾小宝智能科技有限公司 | 一种室内场景下的视觉定位系统及其方法 |
| CN119526932A (zh) * | 2025-01-20 | 2025-02-28 | 普达迪泰(成都)智造研究院有限公司 | 全向轮系、全向车架、全向移动平台以及承重平台 |
Citations (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB191516798A (en) * | 1915-11-04 | 1919-03-27 | Eugene Schneider | Improved Power-transmitting and Steering Mechanism for Caterpillar Tractors. |
| JPH09301008A (ja) * | 1996-05-08 | 1997-11-25 | Kawasaki Heavy Ind Ltd | 差動歯車機構付車輪を備える搬送台車 |
| CN201545061U (zh) * | 2009-12-08 | 2010-08-11 | 东风汽车公司 | 装配生产线用的装配台车 |
| CN203172353U (zh) * | 2013-04-12 | 2013-09-04 | 上海大学 | 一种万向车轮装置 |
| CN204264252U (zh) * | 2014-11-28 | 2015-04-15 | 浙江上加机械有限公司 | 电子助力转向系统 |
| CN104527323A (zh) * | 2014-12-17 | 2015-04-22 | 中国航空工业集团公司北京航空精密机械研究所 | 一种集驱动、转向于一体的轮组 |
| KR20150067507A (ko) * | 2013-12-10 | 2015-06-18 | (주)대성에스이 | 무인차용 구동장치 |
| CN104986220A (zh) * | 2015-07-14 | 2015-10-21 | 上海英集斯自动化技术有限公司 | 一种无人搬运车驱动系统 |
| CN204775583U (zh) * | 2015-05-28 | 2015-11-18 | 浙江上加机械有限公司 | 一种电动堆高车 |
| CN105751892A (zh) * | 2016-04-08 | 2016-07-13 | 浙江同筑科技有限公司 | 紧凑型agv驱动转向一体化装置 |
| CN205387067U (zh) * | 2016-02-23 | 2016-07-20 | 山西东杰智能物流装备股份有限公司 | 自动导引车用双轮差速驱动装置 |
| CN205768620U (zh) * | 2016-05-12 | 2016-12-07 | 吴昊 | 自动导引式搬运装置 |
| CN106515900A (zh) * | 2016-10-10 | 2017-03-22 | 深圳市共进电子股份有限公司 | 一种agv移动设备 |
| CN206125225U (zh) * | 2016-09-21 | 2017-04-26 | 东莞市日博机电科技有限公司 | Agv差速驱动装置 |
| CN206781438U (zh) * | 2017-05-09 | 2017-12-22 | 崔书林 | 新型车辆行走驱动方向导航机构 |
-
2017
- 2017-05-09 CN CN201710322876.1A patent/CN106945467B/zh active Active
Patent Citations (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB191516798A (en) * | 1915-11-04 | 1919-03-27 | Eugene Schneider | Improved Power-transmitting and Steering Mechanism for Caterpillar Tractors. |
| JPH09301008A (ja) * | 1996-05-08 | 1997-11-25 | Kawasaki Heavy Ind Ltd | 差動歯車機構付車輪を備える搬送台車 |
| CN201545061U (zh) * | 2009-12-08 | 2010-08-11 | 东风汽车公司 | 装配生产线用的装配台车 |
| CN203172353U (zh) * | 2013-04-12 | 2013-09-04 | 上海大学 | 一种万向车轮装置 |
| KR20150067507A (ko) * | 2013-12-10 | 2015-06-18 | (주)대성에스이 | 무인차용 구동장치 |
| CN204264252U (zh) * | 2014-11-28 | 2015-04-15 | 浙江上加机械有限公司 | 电子助力转向系统 |
| CN104527323A (zh) * | 2014-12-17 | 2015-04-22 | 中国航空工业集团公司北京航空精密机械研究所 | 一种集驱动、转向于一体的轮组 |
| CN204775583U (zh) * | 2015-05-28 | 2015-11-18 | 浙江上加机械有限公司 | 一种电动堆高车 |
| CN104986220A (zh) * | 2015-07-14 | 2015-10-21 | 上海英集斯自动化技术有限公司 | 一种无人搬运车驱动系统 |
| CN205387067U (zh) * | 2016-02-23 | 2016-07-20 | 山西东杰智能物流装备股份有限公司 | 自动导引车用双轮差速驱动装置 |
| CN105751892A (zh) * | 2016-04-08 | 2016-07-13 | 浙江同筑科技有限公司 | 紧凑型agv驱动转向一体化装置 |
| CN205768620U (zh) * | 2016-05-12 | 2016-12-07 | 吴昊 | 自动导引式搬运装置 |
| CN206125225U (zh) * | 2016-09-21 | 2017-04-26 | 东莞市日博机电科技有限公司 | Agv差速驱动装置 |
| CN106515900A (zh) * | 2016-10-10 | 2017-03-22 | 深圳市共进电子股份有限公司 | 一种agv移动设备 |
| CN206781438U (zh) * | 2017-05-09 | 2017-12-22 | 崔书林 | 新型车辆行走驱动方向导航机构 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN106945467A (zh) | 2017-07-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106945467B (zh) | 一种车辆行走驱动方向导航机构 | |
| CN206781438U (zh) | 新型车辆行走驱动方向导航机构 | |
| CN216185444U (zh) | 一种四驱四转的机器人轮系结构 | |
| CN214084426U (zh) | 一种全向驱动轮机构 | |
| CN110962923A (zh) | 一种全地形悬挂转向装置 | |
| CN107826171B (zh) | 一种具有姿态调整机构的关节履带 | |
| CN112092557A (zh) | 一种agv小车的差速驱动器 | |
| CN220785374U (zh) | 一种巴哈赛车悬架结构 | |
| CN114537066A (zh) | 一种可增强移动机器人地形适应性的可调节悬架机构 | |
| CN113696688A (zh) | 一种新能源汽车轮胎的减震装置 | |
| CN101117086A (zh) | 一种机器人车体悬挂系统 | |
| CN213138964U (zh) | 一种履带底盘浮动支重轮结构及甘蔗收割机 | |
| CN106739911B (zh) | 一种前轮可升降汽车底盘 | |
| CN221562730U (zh) | 一种新能源智能汽车悬架 | |
| CN111038202A (zh) | 一种用于agv的独立悬挂机构及重载agv | |
| CN218112773U (zh) | 一种移动机器人底盘 | |
| CN216734534U (zh) | 一种用于履带车辆的悬挂减震装置 | |
| CN111319409A (zh) | 一种前置小车独立悬挂转向装置 | |
| CN117681981A (zh) | 一种用于拖拉机的橡胶履带结构 | |
| CN211493575U (zh) | 一种用于agv的独立悬挂机构及重载agv | |
| CN204915812U (zh) | 具备独立转向和轮边驱动的汽车单轮装置 | |
| CN219821146U (zh) | 一种全向移动机器人驱动轮垂直减震机构及机器人 | |
| CN110422010B (zh) | 一种行星轮车轮组被动翻转的缓冲机构 | |
| CN221188823U (zh) | 一种适用于震源设备的橡胶履带结构 | |
| CN110341411B (zh) | 一种应用于行星轮式车辆的轮毂电机悬架机构 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |