CN103732431A - 作业车辆 - Google Patents
作业车辆 Download PDFInfo
- Publication number
- CN103732431A CN103732431A CN201280039601.2A CN201280039601A CN103732431A CN 103732431 A CN103732431 A CN 103732431A CN 201280039601 A CN201280039601 A CN 201280039601A CN 103732431 A CN103732431 A CN 103732431A
- Authority
- CN
- China
- Prior art keywords
- converter
- drive
- abnormal
- motor
- electrical motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/50—Control strategies for responding to system failures, e.g. for fault diagnosis, failsafe operation or limp mode
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/46—Series type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/50—Architecture of the driveline characterised by arrangement or kind of transmission units
- B60K6/52—Driving a plurality of drive axles, e.g. four-wheel drive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2058—Electric or electro-mechanical or mechanical control devices of vehicle sub-units
- E02F9/2062—Control of propulsion units
- E02F9/2075—Control of propulsion units of the hybrid type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2300/00—Indexing codes relating to the type of vehicle
- B60W2300/12—Trucks; Load vehicles
- B60W2300/121—Fork lift trucks, Clarks
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Automation & Control Theory (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Mining & Mineral Resources (AREA)
- Hybrid Electric Vehicles (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
一种作业车辆,具有:蓄电装置(11);逆变器装置(7、10);对逆变器装置(7、10)所连接的电路的电压进行转换的变换器装置(12);通过来自逆变器装置(7)的交流电流来驱动液压泵(4)的发电电动机(6);通过来自逆变器装置(10)的交流电流来驱动车轮(61)的电动机(9);和用于控制逆变器装置(7、10)的控制装置(200),在控制装置(200)中,在为了向电动机(9)供给电流而需要的装置发生异常时,通过其他正常的装置来执行与该发生异常的装置在发生异常前所执行的处理相当的其他处理,由此驱动电动机(9)。由此,即使在行驶电力供给系统的一部分发生异常的情况下也能够继续行驶动作。
Description
技术领域
本发明涉及作为动力源而具有发动机及蓄电装置的混合动力式的作业车辆。
背景技术
近年来,出于环境问题、原油价格上涨等方面,对各工业产品增强了节能意向。此前在以基于柴油发动机的液压驱动系统为中心的工程车辆、作业用车辆等领域中,也存在该倾向,基于电动化实现的高效化、节能化的事例逐渐增加。例如,在将上述工程车辆和作业用车辆的驱动部分电动化、即、使驱动源为电动机(电动马达)的情况下,除减少废气以外,还能够期待发动机的高效驱动(混合动力机种的情况)、动力传递效率的提高、再生电力的回收等更多的节能效果。在这样的工程车辆、作业用车辆领域中,叉车的电动化最为先进,使用蓄电池的电力来驱动马达的、即所谓的“蓄电池叉车”领先于其他车辆而实用化,以小型叉车为中心而十分普及。另外最近,继此之后,在液压挖掘机、发动机式叉车等中,组合柴油发动机和电动马达而成的“混合动力车辆”开始成品化。
但是,在像上述那样基于电动化来发展环保、节能化的工程车辆、作业用车辆中,作为在混合动力化的情况下能够预见较大油耗降低效果的车辆,存在轮式装载机。以往的轮式装载机为如下作业用车辆,例如一边经由液力变矩器及传动装置(T/M)而将发动机的动力传递到车轮来进行行驶,一边通过安装在车辆前方的作业装置的铲斗部分来挖掘、搬运沙土等。若将这样的轮式装载机的行驶驱动部分电动化,则能够将液力变矩器及传动装置部分的动力传递效率提高至基于电气的动力传递效率。而且在轮式装载机中,由于作业中频繁地重复前进、停止的行驶动作,所以在将行驶驱动部分电动化的情况下,预见从行驶用的电动机回收制动时的再生电力。
作为混合动力式的轮式装载机,存在将行驶部分电动化的结构、即串联型混合动力系统。在这种系统中,由于将行驶部完全电动化,所以在用于向该行驶部的驱动源即行驶用电动机供给电力的系统(行驶电力供给系统)的一部分发生故障等异常的情况下,可能无法实施随后的行驶动作。也考虑到轮式装载机等具有车轮的作业车辆存在行驶于公路的情况或环行于作业工地内的情况,在因故障而无法行驶时,会在该场所抛锚。因此,谋求即使在行驶电力供给系统的一部分发生异常的情况下也能够继续车辆的行驶动作的功能。
关于这样的故障时的紧急运行方法,在例如日本特开2010-133235号公报中有所公示。有如下记载:根据该技术,在挖掘机等混合动力型工程机械中,在检测到发电电动机(M/G)或电动作业单元(旋转马达等)的控制系统的异常的情况下,继续基于升降压变换器(DCDC变换器)的DC总线的升降压控制。由此,在电动发电机(M/G)或电动作业单元的控制系统发生故障的情况下也能够继续利用了正常的蓄电系统的驱动。
现有技术文献
专利文献
专利文献1:日本特开2010-133235号公报
发明内容
在上述技术中,在发电电动机或电动作业单元的控制系统发生异常的情况下,由于通过正常的蓄电系统的电力来继续电动作业部的驱动,所以考虑到以下可能性:在图3的蓄电装置为容量比蓄电池小的电容器的情况、或与发电系统相反而在蓄电系统侧发生故障的情况下,难以使车辆动作。
因此,本发明的目的在于提供一种作业车辆,在将行驶驱动部电动化的作业车辆中,即使在行驶电力供给系统的一部分发生异常的情况下,也能够继续行驶动作。
为了实现上述目的,本发明具有:发动机;通过上述发动机而被驱动并用于驱动液压执行机构的液压泵;用于蓄存直流电力的蓄电装置;进行直流电流与交流电流的转换的第1逆变器装置及第2逆变器装置;对连接着上述第1逆变器装置及第2逆变器装置的电路的电压进行转换的变换器装置;通过来自上述第1逆变器装置的交流电流而产生上述液压泵的驱动转矩的发电电动机;通过来自上述第2逆变器装置的交流电流而产生车辆的驱动转矩的电动机;和用于控制上述第1逆变器装置及第2逆变器装置的控制装置,在与上述回路连接且为了向上述电动机供给电流而需要的各种装置发生异常时,上述控制装置通过其他正常的装置来执行与该发生异常的装置在发生异常前所执行的处理相同或与该处理相当的其他处理,由此,经由上述第2逆变器装置来驱动上述电动机。
发明效果
根据本发明,在将行驶部电动化的作业车辆中,即使在行驶电力供给系统发生异常的情况下,也能够不在该场所抛锚地行驶到没有妨碍的地点。
附图说明
图1是本发明的实施方式的混合动力式轮式装载机的系统结构图。
图2是表示以往的轮式装载机的代表结构例的图。
图3是本发明的实施方式的行驶电力供给系统的结构图。
图4是本发明的实施方式的控制装置200的结构图。
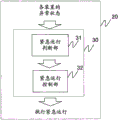
图5是表示本发明的实施方式的紧急运行管理部30的结构的图。
图6是本发明的第1实施方式的与逆变器控制装置23所执行的逆变器装置7(发电电动机6)的控制处理相关的框图。
图7是本发明的第1实施方式的与逆变器控制装置23所执行的逆变器装置10(行驶用电动机9)的控制处理相关的框图。
图8是在本发明的第1实施方式的轮式装载机中从第1驱动方式向第2驱动方式转移时所执行的处理的流程图。
图9是在本发明的第1实施方式的变形例的轮式装载机中从第1驱动方式向第2驱动方式转移时所执行的处理的流程图。
图10是本发明的第2实施方式的与变换器控制装置24所执行的DCDC变换器装置12的控制处理相关的框图。
图11是在本发明的第2实施方式的轮式装载机中从第1驱动方式向第2驱动方式转移时所执行的处理的流程图。
图12是在本发明的第1实施方式的其他变形例的轮式装载机中从第1驱动方式向第2驱动方式转移时所执行的处理的流程图。
具体实施方式
以下,使用附图说明本发明的实施方式。图1是本发明的实施方式的混合动力式轮式装载机的系统结构图。
该图所示的轮式装载机包括:具有铲斗及起落臂(未图示)且安装在车身前方的作业装置50;柴油发动机(内燃机)1;被发动机1驱动、且用于驱动液压执行机构(铲斗液压缸51、起落液压缸52及转向液压缸53)的液压泵4;用于控制从液压泵4向液压执行机构51、52、53供给的液压油的控制阀55;用于蓄存直流电力的蓄电装置11;用于进行直流电流与交流电流的转换的逆变器装置7、11;用于对连接着逆变器装置7、11的电路的电压(逆变器装置7、11间的DC总线电压)进行转换的DCDC变换器装置12;通过来自逆变器装置7的交流电流而产生液压泵4的驱动转矩来辅助发动机1的发电电动机(马达/发电机(M/G))6;通过来自逆变器装置11的交流电流而产生车辆(行驶体60)的驱动转矩的行驶用电动机9;根据操作量而输出用于驱动液压执行机构51、52、53的操作信号的操作装置(操作杆56及方向盘(未图示));和用于控制逆变器装置7、11及变换器装置12等的控制装置200。
发电电动机6还与发动机1连接,通过被发动机1驱动也作为发电机而动作。由发电电动机6产生的电力被供给到行驶用电动机6,或蓄存在蓄电装置11中。发电电动机6的动力运行(发动机辅助)与发电运行的切换在控制装置200中根据发动机1的载荷而进行。
行驶体60具有经由差动齿轮(Dif)及末端传动齿轮(G)而适当安装在传动轴8上的四个车轮61,通过安装在传动轴8的轴上的行驶用电动机9的驱动转矩对各车轮61进行旋转驱动。
铲斗液压缸51及起落液压缸52基于与设置在驾驶室内的操作杆56的操作量相应地输出的操作信号(液压信号)而被驱动。起落液压缸52安装在能够转动地固定于车身前方的起落臂上,基于来自操作杆56的操作信号而伸缩来使起落臂沿上下转动。铲斗液压缸51安装在能够转动地固定于起落臂的前端的铲斗上,基于来自操作杆56的操作信号而伸缩来使铲斗沿上下转动。转向液压缸53基于与设置在驾驶室内的方向盘(未图示)的操舵量相应地输出的操作信号(液压信号)而被驱动。转向液压缸53与各车轮61连结,基于来自方向盘的操作信号而伸缩来改变车轮61的舵角。
蓄电装置11经由DCDC变换器装置12而与逆变器装置7、10电连接,是在逆变器装置7、10之间进行直流电力的交接的结构。此外,蓄电装置11只要能够快速地实施较大电力的输入输出就没有特殊的种类限定,适合使用锂电池等二次电池或大容量双电荷层电容器。因此,在此,说明蓄电装置11为大容量双电荷层电容器的情况。
在上述那样构成的混合动力轮式装载机中,在用于进行沙土等的挖掘作业的作业装置50中,通过由液压泵4供给适当液压来实施与目的相应的作业。另外,行驶体60的行驶动作通过如下方式进行:一边通过蓄电装置11和DCDC变换器装置12将系统电压(各逆变器7、10间的DC总线电压)控制为规定值,一边主要通过发动机1来驱动发电电动机6,借助由此发电得到的电力来驱动行驶用电动机9。此时,在蓄电装置11中,通过吸收在车辆制动时行驶用电动机9所产生的再生电力,或者向发电电动机6或行驶用电动机9供给蓄电电力来对发动机1进行输出辅助,由此,有助于车辆的能耗降低。
此外,成为本发明的对象的混合动力系统不限于图1的结构例,也能够适用于行驶部并联型等各种各样的系统结构。
图2是表示以往的轮式装载机的代表结构例的图。此外,对与上图相同的部分标注相同的附图标记并省略说明(后图也相同)。关于该图所示的以往的轮式装载机,作为主要的驱动部而具有行驶体60和作业装置50(起落/铲斗部分),经由液力变矩器2及传动装置(T/M)3将发动机1的动力传递到车轮61而进行行驶,而且还通过被液压泵4驱动的作业装置50来挖掘、搬运沙土等。由于液力变矩器的动力传递效率低于基于电气的动力传递效率,所以若将图2所示的轮式装载机的行驶驱动部分电动化(也包括并联式混合动力结构),则能够提高来自发动机1的动力的传递效率。而且,由于在作业中的轮式装载机中频繁地重复前进、停止的行驶动作,所以如上述那样在将行驶驱动部分电动化的情况下,能够预见从行驶用电动机9回收制动时的再生电力。若像这样将轮式装载机的驱动装置的一部分电动化而混合动力化,则通常能够将燃料消耗量降低几十百分点的程度。
但是,本实施方式的轮式装载机具有由为了向行驶用电动机9供给电流而需要的各种装置构成的行驶电力供给系统。关于构成该系统的各装置,其与用于控制行驶用电动机9的逆变器装置10所连接的电路连接,在图1所示的例子中,蓄电装置11、DCDC变换器12、发电电动机6和逆变器装置7与之相当。
图3是本发明的实施方式的行驶电力供给系统的结构图。该图所示的行驶电力供给系统包括:蓄电装置11、DCDC变换器装置12、用于控制发电电动机6的逆变器装置7、用于控制行驶用电动机9的逆变器装置10、和平滑电容器41,它们经由DC总线40而适当连接。
控制装置200与蓄电装置11、DCDC变换器装置12、逆变器装置7、逆变器装置10、车内面板(显示装置)65、和紧急运行开关66连接。
显示面板65用于显示构成行驶电力供给系统的各装置的状态(是否发生了异常),设置在轮式装载机的驾驶室内。紧急运行开关66是用于指示是否允许基于控制装置200执行紧急运行(后述)的装置(指示装置),设置在轮式装载机的驾驶室内。
从DCDC变换器装置12向控制装置200输入变换器电流,从控制装置200向DCDC变换器装置12输入变换器电压指令。从逆变器装置7向控制装置200输入发电电动机6的电流值(马达电流),从控制装置200向逆变器装置7输入发电电动机6的电压指令(马达电压指令)。从逆变器装置1向控制装置200输入行驶用电动机9的电流值(马达电流),从控制装置200向逆变器装置10输入行驶用电动机9的电压指令(马达电压指令)。从安装在DC总线40上的检测器(未图示)向控制装置200输入DC总线40的电压(Vdc)。另外,从控制装置200向车内面板65输入显示指令,从紧急运行开关66向控制装置200输入开关指令。
另外,在控制装置200中输入有:发电电动机6及行驶用电动机9的转矩及转速、由操作员操作的操作杆56及踏板类(未图示)的操作量以及车速等车辆信息、蓄电装置11的电流值及电压值等。另外,控制装置200也具有基于上述各输入信号来计算对发电电动机6及行驶用电动机9的转矩指令的功能。
在上述那样构成的行驶电力供给系统中,在构成该系统的各装置没有发生异常时,一边通过蓄电装置11及DCDC变换器装置12将系统电压(各逆变器7、10间的DC总线电压)控制为规定值,一边将来自发电电动机6或蓄电装置11的电流经由逆变器装置10而供给到行驶用电动机9。由此驱动行驶用电动机6。以下,有时会将这样驱动行驶用电动机6的方式称为第1驱动方式。
图4是本发明的实施方式的控制装置200的结构图。如该图所示,在本实施方式的轮式装载机(车辆)中,作为控制装置200,搭载有:进行图1所示的混合动力系统整体的能量流和功率流等的控制的控制器即混合动力控制装置20;用于控制控制阀(C/V)55和液压泵4的液压控制装置21;用于进行发动机1的控制的发动机控制装置22;用于控制逆变器装置7、10的逆变器控制装置23;和用于控制DCDC变换器装置12的变换器控制装置24。
各控制装置20、21、22、23、24具有存储处理内容和处理结果的存储装置(RAM、ROM等)(未图示)、和执行存储在该存储装置中的处理的处理装置(CPU等)(未图示)。另外,各控制装置20、21、22、23、24经由CAN(Controller Area Network,控制器局域网络)而相互连接,相互接收发送各设备的指令值及状态量。混合动力控制装置20如图4所示,位于液压控制装置21、发动机控制装置22、逆变器控制装置23及变换器控制装置24的各控制器的上级,进行系统整体的控制,为了使系统整体发挥最佳作业性能而向其他各控制装置21~24提供具体的动作指令。
此外,图4所示的各控制装置20~24仅示出为了控制图1所示的混合动力系统的各驱动部分而需要的控制器。实际在组成车辆方面,除此之外还需要监控器和信息系统的控制器,但没有将它们图示出。另外,各控制装置20~24不需要如图4所示那样独立于其他控制装置,也可以在某一个控制装置中安装两种以上的控制功能。
另外,在作为本发明的对象的轮式装载机中存在若干基本动作模式,混合动力控制装置20与该各动作相应地使车辆最佳地工作。例如,作为最具有代表性的作业模式存在V循环挖掘作业。V循环挖掘作业为相对于实际的轮式装载机的作业整体占据了约7成以上的主要动作模式。轮式装载机在此时,首先相对于沙堆等挖掘对象物前进,以铲入沙堆等挖掘对象物的方式将沙粒等搬运物装入铲斗内。然后,后退而返回到原位置,操作方向盘且一边使起落臂及铲斗上升,一边向自卸车等搬运车辆前进。然后,使铲斗翻卸而将搬运物装入搬运车辆中(卸土)后再次后退,车辆返回到原位置。车辆如以上说明那样一边描画V字轨迹一边重复进行该作业。在利用图1所示的轮式装载机进行这样的动作时,通过混合动力控制装置20,以在混合动力系统整体中燃料效率及作业效率最高的方式,将来自发动机1及蓄电装置11的输出分配给作业装置50及行驶用电动机9。
另外,轮式装载机除上述那样的基本作业模式即V循环挖掘作业以外,也能够为了从作业工地向其他工地移动而在公路上行驶。在此,在上述那样的公路行驶和V循环挖掘作业共同需要的功能中列举有紧急运行功能。紧急运行是指,即使在系统的某一部分发生故障而失去原本的功能的情况下,也能够通过其他正常的部分来继续最小限度的必要动作。
例如,在公路行驶时,在由于行驶电力供给系统发生故障导致向行驶用电动机的电力供给被切断而无法行驶的情况下,需要将车辆快速地移动到安全地点。在无法行驶的地点为十字路口中央、铁路道口的情况下,车辆移动的重要性进一步提高。另外,在作业工地内,在V循环挖掘作业时行驶电力供给系统发生故障而无法行驶的情况下,考虑到若在该场所抛锚则导致挖掘作业自身停滞。即,该情况下也需要快速移动到不妨碍作业的地点。由此,在这样的情况下需要上述的紧急运行功能,但包括混合动力式的轮式装载机在内,在通过行驶用电动机而行驶的轮式装载机的以往控制功能中,在行驶电力供给系统的一部分发生故障的情况下,难以继续车辆的行驶动作。
因此,在本发明中,为了发挥上述的紧急运行功能,在控制装置200内配置了紧急运行管理部(紧急运行管理机构)30。由此,关于本实施方式的控制装置200,作为行驶用电动机6的驱动方式,除了在构成行驶电力供给系统的各装置没有发生异常时(正常时)所利用的方式(第1驱动方式(上述))以外,还安装有在构成该系统的某一装置发生异常时所利用的方式(第2驱动方式)。混合动力驱动控制装置20位于对混合动力系统的各驱动部分进行控制的控制装置组(控制装置21、22、23、24)的控制方面的上级,因此,能够总括地掌握各驱动部分的状态,在构成行驶电力供给系统的各装置发生异常的情况下,能够通过恰当结构转移到紧急运行。此外,在此,说明在混合动力驱动控制装置20内具有紧急运行管理部30的情况,但也可以作为与其他控制装置20、21、22、23、24独立的控制装置而设置在控制装置200内。
图5是表示本发明的实施方式的紧急运行管理部30的结构图。该图所示的紧急运行管理部30具有紧急运行判断部31和紧急运行控制部32。
紧急运行判断部31为执行如下处理的部分,判断构成行驶电力供给系统的各装置是否发生了异常,在存在发生异常的装置的情况下,进一步判断是否能够执行除去该发生异常的装置以外的紧急运行。有无异常发生的判断基于从对与行驶电力供给系统相关的各装置进行控制的各控制装置输入的异常状态的信息而进行。
紧急运行控制部32为执行如下处理的部分,在紧急运行判断部31中判断成能够执行紧急运行时,通过其他正常的装置来执行与发生异常的装置所执行的处理相同或与该处理相当的其他处理。由此,由于通过行驶电力供给系统的正常的装置向行驶用电动机9供给电流,所以能够执行紧急运行。由此,即使构成行驶电力供给系统的装置发生故障等异常,也能够通过除去该装置以外的结构来确保向行驶用电动机9的电力供给,因此,能够将作业车辆向没有妨碍的地点移动。像这样由紧急运行监视部30执行的具体的控制处理按发生异常的装置而设定,在以下的各实施方式的说明中说明这些控制处理。
首先,说明本发明的第1实施方式。在此,说明行驶电力供给系统中的蓄电装置11或DCDC变换器装置12发生异常的情况下的紧急运行。
图3所示的电力供给系统是在混合动力系统中影响车辆性能的最重要的副系统,以被发动机1驱动的发电电动机6所发电得到的电力Pg为主要电力,一边向行驶用电动机9供给电力Pd一边驱动车辆。另外,将发电电动机6用的逆变器装置7和行驶用电动机9用的逆变器装置10连接起来的DC总线40仅经由平滑电容器41。因此,若在电力Pg和电力Pd中产生少许电力差ΔP,则会导致DC总线40的电压剧烈地变动,难以进行随后的行驶用电动机9的驱动。因此,使用与DC总线40并联连接的DCDC变换器装置12,响应性良好地控制DC总线40部分的电压。此时,成为DCDC变换器装置12的电源的是蓄电装置11。DCDC变换器12使用蓄电装置11的电力来抑制在DC总线40部分中产生的电力差ΔP(即DC总线40部分的电压变动)。
另外,DCDC变换器装置12和蓄电装置11不仅抑制DC总线40部分的电压变动,还是发挥行驶用电动机9在制动时所产生的再生电力的回收、发动机1的功率不足时的辅助等、混合动力车辆特有的功能的电机驱动系统的重要一部分。因此,在DCDC变换器12或蓄电装置11发生故障的情况下,难以进行随后的车辆的行驶驱动。例如,在这些故障发生的地点为公路的情况或作业工地的情况下,需要使车辆迅速地向没有妨碍的地点移动。因此,在电机驱动系统故障时需要紧急运行功能。以下,作为发生异常时的紧急运行,主要说明与正常行驶时相比一边限制功能一边以最小限度的性能继续行驶的情况。
图6示出本发明的第1实施方式的与逆变器控制装置23所执行的逆变器装置7(发电电动机6)的控制处理相关的框图。该图中的开关62的切换位置根据蓄电装置11或变换器装置12是否发生异常(即,利用哪个驱动方式)而变更。图示的状态表示这些装置发生了异常而利用第2驱动方式的状态。
如该图所示,在对行驶用电动机9进行驱动控制时利用第1驱动方式的情况下(正常时),逆变器控制装置23按照记载于图6下侧的路线来控制逆变器装置7。即,逆变器控制装置23在电流变换器63中将从上级的混合动力驱动控制装置20输入的发电电动机6的转矩指令转换成电流指令,并基于该电流指令在控制器64中生成发电电动机6的电压指令(马达电压指令)。此外,在本实施方式的控制器64中,除电流指令以外还输入有马达电流的实测值,进行以使电流的指令值与实测值的偏差接近于零的方式生成电压指令的反馈控制。
另一方面,在利用第2驱动方式的情况下(蓄电装置11或变换器装置12异常时),如记载于图6上侧的路线那样,增加用于执行正常时变换器装置12所执行的电压转换处理的DC总线电压控制系统45。即,在DC总线电压控制系统45的控制器61中,基于从混合动力驱动控制装置20输入的DC总线电压指令(Vdc指令)来生成转矩指令,并将该转矩指令输出到电流指令变换器63。此外,在本实施方式的控制器61中,除Vdc指令以外还输入有DC总线电压的实测值(Vdc),进行以使DC总线电压的指令值与实测值的偏差接近于零的方式生成转矩指令的反馈控制。电流指令变换器63以后的处理以与第1驱动方式相同的方式进行。
图7表示本发明的第1实施方式的与逆变器控制装置23所执行的逆变器装置10(行驶用电动机9)的控制处理相关的框图。
该图所示的框图具有转矩响应限制部46。转矩响应限制部46在利用第2驱动方式的情况下,与利用第1驱动方式的情况(主要利用蓄电装置11的电力来驱动行驶用电动机9而使停止状态的车辆前进的情况)相比较,限制转矩响应性。即,在第2驱动方式时,行驶用电动机9的转矩响应速度与第1驱动方式时相比降低。其原因在于,在使停止状态的车辆前进的情况下,在蓄电装置11及DCDC变换器装置12正常等时一般使用转矩响应性高的蓄电装置11的电力,但在它们发生异常的情况下需要使用通过输出响应性差的发动机1进行驱动而得到的发电电动机6的电力。此外,图7中的转矩响应限制部46内的曲线图中所示的实线73a示出了第1驱动方式的转矩响应性的一例,虚线73b示出了第2驱动方式的转矩响应性的一例。
此外,第2驱动方式时的转矩响应速度优选设定成接近发动机1的输出响应速度。其原因在于,在第2驱动方式时,利用通过发动机1驱动发电电动机6而得到的电力来驱动行驶用电动机9,此时的发电电动机6的输出响应性依赖于发动机1的输出响应性,因此,优选行驶用电动机9的转矩指令也同样地接近发动机1的输出响应性。
如图7所示,逆变器控制装置23在转矩响应限制部46中将从上级的混合动力驱动控制装置20输入的行驶用电动机9的转矩指令降低至规定值并输出到电流指令变换器71。然后,在电流指令变换器71中将该转矩指令转换成电流指令,并基于该电流指令在控制器72中生成行驶用电动机9的电压指令(马达电压指令)。此外,在本实施方式的控制器72中,除电流指令以外还输入有马达电流的实测值,进行以使电流的指令值与实测值的偏差接近于零的方式生成电压指令的反馈控制。
图8是在本发明的第1实施方式的轮式装载机中从第1驱动方式向第2驱动方式转移时所进行的处理的流程图。
该图所示的各处理通过紧急运行管理部30而执行。当开始该图所示的处理时,紧急运行判断部31从各控制装置21、22、23、24输入与构成行驶电力供给系统的各装置相关的异常信息(S100)。然后,基于在S100中输入的异常信息判断蓄电装置11或DCDC变换器装置12是否发生了异常(S101)。在S101中,若这些装置11、12没有异常,则返回到S100并重复处理直到发生异常。另一方面,在S101中,在判断成装置11、12发生异常的情况下,确定执行紧急运行(S102)。此外,S100至S102的处理通过紧急运行判断部31而执行。
在S102结束后,接着,通过紧急运行控制部32来执行S103以后的处理。首先,紧急运行控制部32在逆变器控制装置23所执行的发电电动机6的控制处理中,启动DC总线电压控制系统45(参照图6)(S103)。由此,通过逆变器装置7执行与在第1驱动方式中由DCDC变换器装置12执行的电压转换处理相当的处理。由此被发动机1驱动的发电电动机6所产生的电力经由DC总线40而供给到逆变器装置10。
而且,紧急运行控制部32在通过逆变器控制装置23执行行驶用电动机9的控制处理时,在转矩响应限制部46(参照图7)中选择虚线73b的转矩响应性(S104)。在S104结束后,开始紧急运行(S105)。由此与第1驱动方式相比,能够限制行驶用电动机9的转矩响应性而接近发动机1的输出响应性。在S105结束后,返回到S100并重复S100以后的处理。
如上所述,根据本实施方式,即使在蓄电装置11或DCDC变换器装置12发生异常的情况下,也能够在紧急运行管理部30中,通过正常的发电电动机6的控制系统来启动DC总线电压控制系统45,而且还能够使行驶用电动机9的转矩响应性接近发动机1的输出响应性,因此,能够继续轮式装载机的行驶。此外,第1实施方式的情况与后述的第2实施方式的情况不同,由于能够从发动机1(发电电动机6)供给行驶所需要的大输出,所以仅限制行驶用电动机9的转矩的响应性能即可。
另外,上述说明的轮式装载机为除能够进行基于行驶用电动机9的行驶以外,也能够进行基于设置在车辆前方的作业装置50的作业的车辆。因此,即使如上述那样在蓄电装置11或DCDC变换器装置12发生异常的情况下,有时也需要继续作业装置50的动作。但是在该情况下,由于蓄电装置11或DCDC变换器发生异常,所以无法得到基于发电电动机6的电动功率辅助,可能无法执行所期望的作业。接下来,将鉴于该方面的控制处理作为第1实施方式的变形例进行说明。
图9是在本发明的第1实施方式的变形例的轮式装载机中从第1驱动方式向第2驱动方式转移时所执行的处理的流程图。在该变形例中,鉴于以上方面,在被液压泵4要求功率时,将发动机1的功率优先供给到液压泵4。即,通过液压控制装置21计算作业装置50所要求的功率(液压功率:Poil),在混合动力驱动控制装置20中,控制成将行驶用电动机的输出(行驶功率:Prun)限制在从发动机1的输出上限(发动机最大功率:Pengmax)减去液压功率Poil而得到的值(行驶功率限制值:Psub)以下。
图9所示的流程图在取代S104的处理而执行S401、402、403的处理的方面与图8的流程图不同。另外,对与图8的流程图相同的处理标注相同的附图标记并省略说明。
在图9所示的流程图中,在S103结束后,将液压控制装置21所运算出的液压功率Poil、和从混合动力驱动控制装置20输出的发动机最大功率Pengmax输入到紧急运行控制部32(S401)。然后,紧急运行控制部32执行通过从发动机最大功率Pengmax减去液压功率Poil而对紧急运行时的行驶功率限制值Psub进行运算的处理(S402)。
接下来,紧急运行控制部32在通过逆变器控制装置23执行行驶用电动机9的控制处理时,在转矩响应限制部46中选择虚线73b的转矩响应性,由此,限制行驶用电动机9的转矩的响应性,并且,以使行驶用电动机9的功率Prun的上限值保持于行驶功率限制值Psub以下的方式限制行驶用电动机9的功率Prun(S403)。作为在S403中将行驶功率Prun保持于Psub以下的方法,在转矩响应限制部46中,基于限制值Psub来设定行驶用电动机9的转矩的最大值。由此即使在蓄电装置11或DCDC变换器装置12发生异常的情况下,也能够使基于作业装置50的作业优先,而且,在即使如此电力仍产生剩余的情况下,能够一边进行作业一边行驶。
此外,在上述例子中,说明了使作业装置50的输出要求优先的方式,但也存在根据轮式装载机的动作而使行驶用电动机9的输出要求优先的情况。此时,通过从发动机最大功率Pengmax减去行驶功率Prun后剩余的功率来驱动作业装置50。
接下来说明本发明的第2实施方式。在此,说明行驶电力供给系统中的发电电动机6或逆变器装置7发生异常的情况下的紧急运行。
正常时,基本利用发电电动机6及逆变器装置7对车辆行驶所需要的电力进行发电供给。因此,在它们发生异常的情况下,由于来自发电电动机6的电力供给被切断或不足,所以基本上难以进行车辆行驶。但是,如也在第1实施方式中所述那样,在发生这样的异常的地点为公路的情况或作业工地的情况下,需要使车辆快速地移动。因此,与第1实施方式同样地,紧急运行功能十分重要。因此,在本实施方式中,主要依赖于蓄电装置11的电力来使车辆行驶。
图10是表示本发明的第2实施方式的与变换器控制装置24所执行的DCDC变换器装置12的控制处理相关的框图。该图所示的框图具有电力供给限制部47。电力供给限制部47在利用第1驱动方式的情况下(正常时),使DC总线电压的响应性优先,仅进行用于抑制因蓄电装置11的过放电而导致的劣化的电力供给限制。另一方面,在发电电动机6或逆变器装置7发生异常时(利用第2驱动方式的情况),与正常时相比增大电力供给限制量。具体而言,基于能够向行驶用电动机9供给的电力量等来确定电力供给限制量(后述),并基于该电力供给限制量来限制向行驶用电动机9的电力供给。由此,确保了车辆行驶所需要的最低限度的电力,并且结果上能够实施行驶用电动机9的转矩限制。
如图10所示,变换器控制装置24基于从上级的混合动力驱动控制装置20输入的DC总线电压指令(Vdc指令)在控制器81中生成变换器电流指令,并将该变换器电流指令输出到电力供给限制部47。在控制器81中,除Vdc指令以外还输入有DC总线电压的实测值Vdc,进行以使DC总线电压的指令值与实测值的偏差接近于零的方式生成电流指令的反馈控制。
在电力供给限制部47中,将从控制器81输入的变换器电流指令降低至规定值并输出到控制器82。然后,在控制器82中,基于来自电力供给限制部47的变换器电流指令而生成变换器电压指令。在控制器82中,除变换器电流指令以外还输入有变换器电流的实测值,进行以使变换器电流的指令值与实测值的偏差接近于零的方式生成变换器电压指令的反馈控制。
通过上述处理,即使在发电电动机6或逆变器装置7发生异常的情况下,也能够将DC总线40的电压控制为规定值,进而对行驶用电动机9供给规定的电力。
图11是在本发明的第2实施方式的轮式装载机中从第1驱动方式向第2驱动方式转移时所执行的处理的流程图。
当开始该图所示的处理时,紧急运行判断部31从各控制装置21、22、23、24输入与构成行驶电力供给系统的各装置相关的异常信息(S200)。然后,基于在S200中输入的异常信息来判断发电电动机6或逆变器装置7是否发生了异常(S201)。在S201中,若这些装置6、7没有异常,则返回到S200并重复处理直到发生异常。另一方面,在S201中,在判断成装置6、7发生异常的情况下,确定执行紧急运行(S202)。
在S202中确定执行紧急运行后,紧急运行判断部31判断在通过发动机1驱动发电电动机6时是否能够通过逆变器装置7进行整流发电动作(S203)。在本实施方式中,通过发电电动机6产生三相交流电流,只要其中至少一相交流电流能够整流,就判断成能够通过逆变器装置7进行整流发电动作并进入到S204。另一方面,在S203中判断成因逆变器装置7内的二极管部的异常等而导致难以进行发电电动机6的整流发电动作的情况下进入到S206。此外,S200至S203的处理通过紧急运行判断部31而执行。
在S203中判断成能够进行整流发电动作的情况下,回避运行控制部32以规定转速对发动机1进行定速驱动(S204)。由此通过发电电动机6而产生规定的电力。然后,回避运行控制部32基于蓄电装置11的残余电容量及发电电动机6的发电量,确定电力供给限制部47(参照图10)中的电力供给限制量(S205)。作为该电力供给限制量的确定方法,只要基于车辆行驶所需要的最低限度的电力、和输出该所需要的最低电力的时间(即,紧急运行时保证的最小行驶距离)来计算即可。此时,可以从蓄电装置11的残余电容量及发电电动机6的发电量、和上述所需要的最低电力计算出推算可行驶距离,并将该计算结果显示在车内面板65上。在确定电力供给限制量后进入到S207。
另一方面,在S203中判断成难以进行整流发电动作的情况下,回避运行控制部32基于蓄电装置11的残余电容量来确定电力供给限制部47中的电力供给限制量(S206)。电力供给限制量的确定方法与S205中的方法相同,可以将推算可行驶距离适当显示在车内面板65上。在确定电力供给限制量后进入到S207。
在S207中,紧急运行控制部32在变换器控制装置24所执行的DCDC变换器装置12的控制处理中,基于在S205或S206中确定的电力供给限制量来使电力供给限制部47工作。由此,限制向行驶用电动机9供给的电力。而且,与在第1实施方式中说明的S104的处理同样地,在逆变器控制装置23内构成的行驶用电动机9的控制部中启动转矩指令响应限制部46(参照图7)(S208)。此外,此时的响应限制优选以根据蓄电装置11的残余电容量、发电电动机6的发电量、S205或S206中的电力供给限制量的大小而尽可能地继续车辆行驶的方式确定。在S208结束后,开始紧急运行(S209)。由此与第1驱动方式相比能够一边限制行驶用电动机9的转矩的响应性及大小一边使车辆行驶。在S209结束后,返回到S200并重复S200以后的处理。
如上所述,根据本实施方式,即使在发电电动机6或逆变器装置7发生异常的情况下,也能够在紧急运行管理部30中,向行驶用电动机9供给车辆行驶所需要的最低限度的电力,并且限制行驶用电动机9的转矩响应,因此,能够继续轮式装载机的行驶。
此外,在本实施方式中也根据情况的不同,与第1实施方式的变形例同样地有时需要使作业装置50动作。但是,在本实施方式中,由于行驶用电动机9的输出受到电力供给限制部47的限制,所以能够按照要求输出作业装置50的动力。因此,使作业装置50动作的情况也同样地,只要按照图11的流程图执行紧急运行即可。
另外,在上述的各实施方式中,说明了在紧急运行管理部30判断成能够执行紧急运行的情况下,自动实施紧急运行的情况。但是,也可以增加用于根据来自操作员的指示而开始紧急运行动作的系统(紧急运行开始指示系统)。此时,还可以为了在指示紧急运行开始时进行参照而增加将构成行驶电力供给系统的各装置的异常状态及紧急运行可否状态显示在车内面板65上的系统(状态显示系统)。若将这样的紧急运行开始指示系统及状态显示系统设置于轮式装载机的情况下的处理补充到例如第1实施方式所示的图8的流程图中,则成为图12所示的流程图。
图12是在本发明的第1实施方式的其他变形例的轮式装载机中从第1驱动方式向第2驱动方式转移时所执行的处理的流程图。该流程图在执行S300、301的处理的方面与图8的流程图不同。对与图8的流程图相同的处理标注相同的附图标记并省略说明。
在S102中确定执行紧急运行后,紧急运行判断部31向车内面板65输出显示信号,显示构成行驶电力供给系统的各装置的状态及紧急运行可否状态(S300)。即,显示基于在S100中输入的信息而判断成发生了异常的装置名,并且,基于在S100中输入的信息而显示是否能够仅通过正常的装置来进行紧急运行。由此,操作员能够判断是否开始紧急运行。在S300结束后进入到S301。
S301是用于在从操作员传来紧急运行开始指示之前使紧急运行的开始待命的处理,判断紧急运行开关66的切换位置是否位于“ON”。在该判断中利用从开关66向控制装置200输入的开关指令的内容。在紧急运行开关66的切换位置为ON的情况下,进入到S103并最终执行紧急运行。另一方面,在切换位置为OFF的情况下,返回到S100并重复以后的处理。
根据这样构成的轮式装载机,由于存在操作员的指示后才执行紧急运行,所以能够使操作员认识到紧急运行正在执行。另外,能够避免不必要的紧急运行。而且,由于显示发生了异常的装置和紧急运行的可否状态,因此能够在决定执行紧急运行之前准确地掌握轮式装载机的状态。
如以上所述,根据本发明,即使在行驶电力供给系统的一部分发生异常的情况下,也能够对正常的装置附加紧急运行所需要的控制功能,并且,通过与正常行驶相比限制行驶用电动机的转矩的响应和大小,能够在该场所不抛锚地使车辆退避到没有妨碍的地点。
此外,在上述的各实施方式中,说明了仅在预先设定的装置发生异常时执行紧急运行的情况,但也可以构成为,基于在S100或S200中从各控制装置输入的异常信息来确定发生了异常的装置,并根据该发生异常的装置而执行不同的紧急运行。即,若列举图8的流程图的情况为例,则也可以以如下方式构成轮式装载机:在基于S100的信息判断成蓄电装置11或变换器装置12发生异常的情况下,执行该图8中的S102以后的处理,另一方面,在基于S100的信息而判断成发电电动机6或逆变器装置7发生异常的情况下,执行图11的S202以后的处理。
附图标记说明
1…发动机,4…液压泵,50…前作业装置,6…发电电动机(马达、发电机:M/G),7…M/G逆变器装置,8…传动轴,9…行驶用电动机,10…行驶用逆变器装置,11…蓄电装置,12…DCDC变换器装置,20…混合动力驱动控制装置,21…液压控制装置,22…发动机控制装置,23…逆变器控制装置,24…变换器控制装置,30…紧急运行管理部,31…紧急运行判断部,32…紧急运行控制部,40…DC总线,41…平滑用电容器,45…DC总线电压控制系统,46…转矩响应限制部,47…电力供给限制部,65…车内面板(显示装置),66…紧急运行开关,200…控制装置
Claims (10)
1.一种作业车辆,其特征在于,具有:
发动机;
通过所述发动机而被驱动并用于驱动液压执行机构的液压泵;
用于蓄存直流电力的蓄电装置;
进行直流电流与交流电流的转换的第1逆变器装置及第2逆变器装置;
对连接着所述第1逆变器装置及第2逆变器装置的电路的电压进行转换的变换器装置;
通过来自所述第1逆变器装置的交流电流而产生所述液压泵的驱动转矩的发电电动机;
通过来自所述第2逆变器装置的交流电流而产生车辆的驱动转矩的电动机;和
用于控制所述第1逆变器装置及第2逆变器装置的控制装置,
在与所述电路连接且为了向所述电动机供给电流而需要的各种装置发生异常时,所述控制装置通过其他正常的装置来执行与发生该异常的装置在发生异常前所执行的处理相同或与该处理相当的其他处理,由此,经由所述第2逆变器装置来驱动所述电动机。
2.如权利要求1所述的作业车辆,其特征在于,
在发生所述异常时,所述控制装置与发生异常前相比较,限制所述电动机的转矩的响应性及大小中的至少一方。
3.如权利要求2所述的作业车辆,其特征在于,
所述控制装置判断所述蓄电装置、所述变换器装置、所述发电电动机及所述第1逆变器装置中的哪一个发生了异常,并以与该发生异常的装置对应的驱动方式来驱动所述电动机。
4.如权利要求3所述的作业车辆,其特征在于,
所述驱动方式是在所述蓄电装置或所述变换器装置发生异常时而被利用的驱动方式,
所述控制装置在所述驱动方式中,通过在所述第1逆变器装置中执行所述变换器装置所执行的电压转换处理来驱动所述电动机。
5.如权利要求4所述的作业车辆,其特征在于,
所述驱动方式是与发生异常前相比还限制所述电动机的转矩的响应性的驱动方式,
所述控制装置在所述驱动方式中,以使所述电动机的转矩响应速度接近所述发动机的输出响应速度的方式进行限制。
6.如权利要求4或5所述的作业车辆,其特征在于,
所述控制装置在所述驱动方式中,在被所述液压泵要求功率时,将所述发动机的功率优先供给到所述液压泵。
7.如权利要求3所述的作业车辆,其特征在于,
所述驱动方式是在所述发电电动机或所述第1逆变器装置发生异常时而被利用的驱动方式,
所述控制装置在所述驱动方式中,与发生异常前相比增大所述变换器装置所执行的对所述电动机的电力供给限制处理的限制量的大小。
8.如权利要求7所述的作业车辆,其特征在于,
基于所述蓄电装置的残余电容量来计算出在所述驱动方式中由所述变换器装置所执行的电力供给限制处理的限制值的大小。
9.如权利要求1至8中任一项所述的作业车辆,其特征在于,
还具有用于显示所述蓄电装置、所述变换器装置、所述发电电动机及所述第1逆变器装置的状态的显示装置。
10.如权利要求1至9中任一项所述的作业车辆,其特征在于,
还具有指示装置,该指示装置用于使所述控制装置允许通过由其他正常的装置来执行与发生了所述异常的装置在发生异常前所执行的处理相同或与该处理相当的其他处理,来驱动所述电动机。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011178151A JP2013039874A (ja) | 2011-08-16 | 2011-08-16 | 作業車両 |
| JP2011-178151 | 2011-08-16 | ||
| PCT/JP2012/070749 WO2013024869A1 (ja) | 2011-08-16 | 2012-08-15 | 作業車両 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN103732431A true CN103732431A (zh) | 2014-04-16 |
Family
ID=47715186
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201280039601.2A Pending CN103732431A (zh) | 2011-08-16 | 2012-08-15 | 作业车辆 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20140163804A1 (zh) |
| EP (1) | EP2746084A4 (zh) |
| JP (1) | JP2013039874A (zh) |
| CN (1) | CN103732431A (zh) |
| WO (1) | WO2013024869A1 (zh) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI549418B (zh) * | 2015-03-31 | 2016-09-11 | 寧茂企業股份有限公司 | 交流馬達驅動系統及驅動方法 |
| CN106335497A (zh) * | 2015-07-07 | 2017-01-18 | 现代自动车株式会社 | 控制包括驱动电动机车辆的方法和装置 |
| CN112469584A (zh) * | 2018-08-10 | 2021-03-09 | 日立建机株式会社 | 作业车辆 |
| CN113454294A (zh) * | 2019-02-19 | 2021-09-28 | 株式会社小松制作所 | 作业机械的控制系统以及控制方法 |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ITTO20110924A1 (it) * | 2011-10-14 | 2013-04-15 | Merlo Project S R L Con Unico Socio | Macchina da lavoro ibrido elettro-idraulico |
| KR101608264B1 (ko) * | 2012-03-28 | 2016-04-01 | 가부시끼 가이샤 구보다 | 하이브리드 작업차 |
| JP6014463B2 (ja) * | 2012-11-07 | 2016-10-25 | 日立建機株式会社 | 作業車両 |
| EP2752330B1 (en) * | 2013-01-04 | 2018-03-07 | Visedo Oy | A mobile working machine with intermediate circuit voltage control |
| US10300779B2 (en) * | 2013-02-22 | 2019-05-28 | Frampton Ellis | Failsafe devices, including transportation vehicles |
| JP6324072B2 (ja) * | 2014-01-07 | 2018-05-16 | 株式会社Kcm | ハイブリッド式ホイールローダ |
| JP6470947B2 (ja) * | 2014-11-14 | 2019-02-13 | 西日本旅客鉄道株式会社 | 駆動システム、及び気動車 |
| WO2017030882A1 (en) | 2015-08-14 | 2017-02-23 | Crown Equipment Corporation | Steering and traction applications for determining a steering control attribute and a traction control attribute |
| CN107848565B (zh) | 2015-08-14 | 2020-10-23 | 克朗设备公司 | 基于转向模型的基于模型的诊断 |
| JP6269624B2 (ja) * | 2015-09-08 | 2018-01-31 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| DE102015118535A1 (de) * | 2015-10-29 | 2017-05-04 | Terex MHPS IP Management GmbH | Schwerlaststapler |
| EP3340456B1 (en) * | 2016-12-21 | 2021-04-14 | Danfoss Mobile Electrification Oy | An electric system for an electromechanical power transmission chain |
| US10414288B2 (en) | 2017-01-13 | 2019-09-17 | Crown Equipment Corporation | Traction speed recovery based on steer wheel dynamic |
| KR102442228B1 (ko) | 2017-01-13 | 2022-09-13 | 크라운 이큅먼트 코포레이션 | 고속 전방 틸러 감도 억압 |
| WO2018163826A1 (ja) * | 2017-03-07 | 2018-09-13 | 日立建機株式会社 | 建設機械 |
| US9834206B1 (en) * | 2017-03-29 | 2017-12-05 | Ford Global Technologies, Llc | Fault-tolerant operation of hybrid electric vehicle |
| JP6850235B2 (ja) * | 2017-09-29 | 2021-03-31 | 日立建機株式会社 | 電気駆動作業車両および車輪電気駆動ユニット |
| US11597297B2 (en) | 2019-05-03 | 2023-03-07 | Oshkosh Corporation | Electronic control system for electric refuse vehicle |
| JP7252088B2 (ja) * | 2019-08-02 | 2023-04-04 | 日立建機株式会社 | 作業車両およびそれに用いられる車両制御装置 |
| WO2024202934A1 (ja) * | 2023-03-30 | 2024-10-03 | 日立建機株式会社 | ダンプトラック |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002242234A (ja) * | 2001-02-19 | 2002-08-28 | Sumitomo (Shi) Construction Machinery Manufacturing Co Ltd | ハイブリッドショベル |
| JP2004023857A (ja) * | 2002-06-14 | 2004-01-22 | Nissan Motor Co Ltd | モータ駆動車両 |
| JP2005012902A (ja) * | 2003-06-18 | 2005-01-13 | Hitachi Constr Mach Co Ltd | ハイブリッド式作業車両 |
| JP2007191062A (ja) * | 2006-01-19 | 2007-08-02 | Hitachi Ltd | 自動車の駆動装置 |
| CN101370683A (zh) * | 2006-01-27 | 2009-02-18 | 丰田自动车株式会社 | 电动机驱动设备及包括其的车辆 |
| CN101596873A (zh) * | 2009-07-03 | 2009-12-09 | 奇瑞汽车股份有限公司 | 混合动力车电机运行模式控制方法 |
| JP2010120481A (ja) * | 2008-11-19 | 2010-06-03 | Nissan Motor Co Ltd | 電動モータ式四輪駆動車両の四輪駆動切り替え制御装置 |
| JP2010178508A (ja) * | 2009-01-29 | 2010-08-12 | Sumitomo Heavy Ind Ltd | ハイブリッド式作業機械及びサーボ制御システム |
| CN101902198A (zh) * | 2009-02-25 | 2010-12-01 | 通用汽车环球科技运作公司 | 用于诊断混合动力车辆中的电机控制电路的方法和设备 |
| CN102085861A (zh) * | 2009-12-03 | 2011-06-08 | 现代自动车株式会社 | 一种混合动力车辆用电机驱动系统及故障时控制该系统的方法 |
| CN102085813A (zh) * | 2009-12-04 | 2011-06-08 | 现代自动车株式会社 | 用于混合动力车的电动机驱动系统及用于控制其的方法 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5421074B2 (ja) | 2008-11-10 | 2014-02-19 | 住友重機械工業株式会社 | ハイブリッド型建設機械 |
-
2011
- 2011-08-16 JP JP2011178151A patent/JP2013039874A/ja active Pending
-
2012
- 2012-08-15 CN CN201280039601.2A patent/CN103732431A/zh active Pending
- 2012-08-15 US US14/237,002 patent/US20140163804A1/en not_active Abandoned
- 2012-08-15 EP EP12824328.4A patent/EP2746084A4/en not_active Withdrawn
- 2012-08-15 WO PCT/JP2012/070749 patent/WO2013024869A1/ja active Application Filing
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002242234A (ja) * | 2001-02-19 | 2002-08-28 | Sumitomo (Shi) Construction Machinery Manufacturing Co Ltd | ハイブリッドショベル |
| JP2004023857A (ja) * | 2002-06-14 | 2004-01-22 | Nissan Motor Co Ltd | モータ駆動車両 |
| JP2005012902A (ja) * | 2003-06-18 | 2005-01-13 | Hitachi Constr Mach Co Ltd | ハイブリッド式作業車両 |
| JP2007191062A (ja) * | 2006-01-19 | 2007-08-02 | Hitachi Ltd | 自動車の駆動装置 |
| CN101370683A (zh) * | 2006-01-27 | 2009-02-18 | 丰田自动车株式会社 | 电动机驱动设备及包括其的车辆 |
| JP2010120481A (ja) * | 2008-11-19 | 2010-06-03 | Nissan Motor Co Ltd | 電動モータ式四輪駆動車両の四輪駆動切り替え制御装置 |
| JP2010178508A (ja) * | 2009-01-29 | 2010-08-12 | Sumitomo Heavy Ind Ltd | ハイブリッド式作業機械及びサーボ制御システム |
| CN101902198A (zh) * | 2009-02-25 | 2010-12-01 | 通用汽车环球科技运作公司 | 用于诊断混合动力车辆中的电机控制电路的方法和设备 |
| CN101596873A (zh) * | 2009-07-03 | 2009-12-09 | 奇瑞汽车股份有限公司 | 混合动力车电机运行模式控制方法 |
| CN102085861A (zh) * | 2009-12-03 | 2011-06-08 | 现代自动车株式会社 | 一种混合动力车辆用电机驱动系统及故障时控制该系统的方法 |
| CN102085813A (zh) * | 2009-12-04 | 2011-06-08 | 现代自动车株式会社 | 用于混合动力车的电动机驱动系统及用于控制其的方法 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI549418B (zh) * | 2015-03-31 | 2016-09-11 | 寧茂企業股份有限公司 | 交流馬達驅動系統及驅動方法 |
| US9698721B2 (en) | 2015-03-31 | 2017-07-04 | Rhymebus Corporation | AC motor driving system and method thereof |
| CN106335497A (zh) * | 2015-07-07 | 2017-01-18 | 现代自动车株式会社 | 控制包括驱动电动机车辆的方法和装置 |
| CN106335497B (zh) * | 2015-07-07 | 2019-12-06 | 现代自动车株式会社 | 控制包括驱动电动机车辆的方法和装置 |
| CN112469584A (zh) * | 2018-08-10 | 2021-03-09 | 日立建机株式会社 | 作业车辆 |
| CN112469584B (zh) * | 2018-08-10 | 2024-04-05 | 日立建机株式会社 | 作业车辆 |
| CN113454294A (zh) * | 2019-02-19 | 2021-09-28 | 株式会社小松制作所 | 作业机械的控制系统以及控制方法 |
| US11939743B2 (en) | 2019-02-19 | 2024-03-26 | Komatsu Ltd. | Control system and control method for work machine |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2013024869A1 (ja) | 2013-02-21 |
| JP2013039874A (ja) | 2013-02-28 |
| US20140163804A1 (en) | 2014-06-12 |
| EP2746084A4 (en) | 2015-06-24 |
| EP2746084A1 (en) | 2014-06-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103732431A (zh) | 作业车辆 | |
| CN103403268B (zh) | 轮式装载机 | |
| CN102301583B (zh) | 混合式工作机械及伺服控制系统 | |
| JP5356543B2 (ja) | 作業用車両の駆動制御装置 | |
| JP5220679B2 (ja) | ハイブリッド型作業機械及びハイブリッド型作業機械の制御方法 | |
| EP2918435B1 (en) | Work vehicle | |
| CN103328295B (zh) | 作业车辆的控制装置及作业车辆 | |
| CN104395539B (zh) | 液压作业机械 | |
| CN102301561B (zh) | 混合式工作机械及蓄电控制装置 | |
| KR102372681B1 (ko) | 전동식 건설 기계 | |
| US8914177B2 (en) | Hybrid wheel loader | |
| WO2012153755A1 (ja) | 鉱山用電力管理システム | |
| EP2228492A1 (en) | Hybrid construction machine | |
| KR20120024833A (ko) | 하이브리드형 작업기계 및 작업기계의 제어방법 | |
| CN102325947A (zh) | 具备电源系统的建筑机械以及工业车辆 | |
| CN105074232A (zh) | 工程机械 | |
| JP2010088145A (ja) | 鉄道車両の駆動システム | |
| Kagoshima | The development of an 8 tonne class hybrid hydraulic excavator SK80H | |
| KR20170087825A (ko) | 하이브리드 작업 기계의 제어 장치, 하이브리드 작업 기계, 및 하이브리드 작업 기계의 제어 방법 | |
| JP5160359B2 (ja) | ハイブリッド型建設機械 | |
| JP2015101290A (ja) | 産業車両 | |
| JP2020165273A (ja) | 作業機械、情報処理装置、情報処理方法、プログラム | |
| WO2023235125A1 (en) | Power systems and controls for electric machines | |
| JP2014231297A (ja) | ハイブリッド作業機械 | |
| JP2014231299A (ja) | ハイブリッド作業機械 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20140416 |