CN103523478A - 一种多自由度自动随行小车 - Google Patents
一种多自由度自动随行小车 Download PDFInfo
- Publication number
- CN103523478A CN103523478A CN201310480360.1A CN201310480360A CN103523478A CN 103523478 A CN103523478 A CN 103523478A CN 201310480360 A CN201310480360 A CN 201310480360A CN 103523478 A CN103523478 A CN 103523478A
- Authority
- CN
- China
- Prior art keywords
- degree
- freedom
- inverted
- automatic accompanying
- trolley according
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Landscapes
- Carriers, Traveling Bodies, And Overhead Traveling Cranes (AREA)
- Forklifts And Lifting Vehicles (AREA)
Abstract
本发明提供了一种多自由度自动随行小车,包括控制箱体,控制箱体外缘上套有承载支架,承载支架上的连接臂通过水平驱动装置悬挂在小车两侧的工字型导轨上,其特征在于:控制箱体通过竖直驱动装置连接有辅助旋转机构,构成转动副。辅助旋转机构包括支撑架、旋转驱动电机、与旋转驱动电机相连的摩擦驱动轮;支撑架上挂有倒U型吊具,倒U型吊具上方的圆弧轨道与摩擦驱动轮相接触。本发明提供的小车具有四个自由度:水平、竖直方向移动、绕竖直方向(z轴)旋转以及倒U型吊具绕水平方向(x轴)旋转,增加了运输与装配过程的灵活性,提高了装配效率和自动化水平,减轻了工人的负担。
Description
技术领域
本发明涉及自动化输送技术领域,具体是一种多自由度自动随行小车。
背景技术
自动随行小车是一种自动化物料输送装置,属于自动化输送技术领域,广泛应用于机械制造、汽车装配、部件装配等自动化输送生产线,在国内外各大、中型企业中都有不同程度的应用。自动随行小车可以根据工位要求,按照操作指令进行自动化控制。其主要特点是输送效率高、故障率低、噪音小、设备维护方便、自动化水平高,对于汽车输送线可以实现多车型混线生产。典型的自行小车输送系统主要由轨道、载物车、电动环链葫芦、吊具等部件组成,吊具通常采用一字吊具和框式吊具。
现有的自行小车方面的专利如公开号CN102424253A、CN102092571A、CN102991979A所公示的中国专利,自行小车一般只有水平、竖直方向移动两个自由度,其中公开号CN102991979A所公示的专利为了满足工件升降的要求,采用电动环链葫芦的方法,上述自动随行小车存在一定的缺陷。例如,在汽车装配过程中,工件升降时稳定性差,并且无法实现所运载工件的旋转动作,致使某些装配过程中对工人的操作要求比较高,操作也比较费力,由此增加了装配时间,导致生产效率降低。因此,如何解决上述缺陷,就成为了一个紧迫的问题。
发明内容
本发明提供了一种具有四个自由度的自动随行小车,增加了运输与装配过程的灵活性,提高了装配效率和自动化水平,减轻了工人的负担。
本发明包括承载支架,承载支架上装有控制箱体,承载支架外缘上有连接臂,连接臂通过水平驱动装置悬挂在小车两侧的工字型导轨上,提供水平方向自由度,其特征在于:控制箱体通过竖直驱动装置连接有辅助旋转机构,提供竖直方向自由度;竖直驱动装置上方与承载支架连接构成转动副,通过跑迷宫绕Z轴旋转自由度;辅助旋转机构包括支撑架、旋转驱动电机、与旋转驱动电机相连的摩擦驱动轮;支撑架上挂有倒U型吊具,倒U型吊具上方圆弧轨道与摩擦驱动轮相接触,提供绕X轴旋转自由度。
该小车具有四个自由度,各自由度采用独立的驱动装置,运动过程中也相互独立,增加了运输与装配过程的灵活性,提高了装配效率和自动化水平,减轻了工人的负担。
进一步改进,所述的竖直驱动装置包括驱动电机、伸缩筒、竖直丝杆与滑块,其中,控制箱体通过竖直丝杆与伸缩筒内部的滑块连接,滑块与辅助旋转机构刚性连接。
相对传统随行小车依靠电动环链葫芦来改变工件高度的方法,本发明中采用电机、丝杠、滑块、伸缩筒等组成的机构来实现小车竖直方向的升降,从而满足了装配过程中对装配体变高度的要求。
进一步改进,所述的伸缩筒为台阶式伸缩筒,内壁安装有滚轮,辅助自动随行小车装置竖直移动时方形筒的伸缩运动,保证伸缩筒伸缩运动平稳。
进一步改进,所述的伸缩筒与承载支架通过滚珠构成转动副,驱动电机通过齿轮组带动滚珠和伸缩筒旋转,与竖直方向的运动独立,互不干扰。
进一步改进,所述的辅助旋转机构装有两个支撑滚轮,倒U型吊具上的圆弧轨道安装在两个支撑滚轮之间,用于支撑、辅助倒U型吊具绕x轴的旋转。
进一步改进,所述的倒U型吊具的两个底脚分别装有支撑臂,支撑臂两端通过电机和水平丝杆分别连接有伸缩臂。支撑臂与伸缩臂在电机和丝杠的作用下,进行伸缩运动,从而满足多车型混线生产的要求。
进一步改进,所述的伸缩臂上装有固定工件的顶针和限位块,还可以防止倒U型吊具旋转时车身发生侧移或翻转脱落。
进一步改进,所述的水平驱动装置包括水平驱动电机、水平驱动轮,水平驱动轮与水平驱动电机连接,卡在工字型导轨的凹槽里。
进一步改进,所述的水平驱动装置还设有辅助轮,安装在工字型导轨的下方。
进一步改进,所述的连接臂为十字型。
附图说明
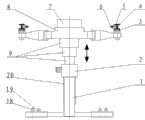
图1(a)为本发明主视图。
图1(b)为本发明左视图。
图2为承载支架结构图。
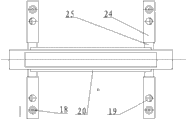
图3为辅助旋转机构结构图。
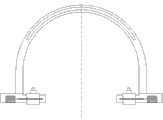
图4(a)为倒U型吊具结构主视图。
图4(b)为倒U型吊具结构俯视图。
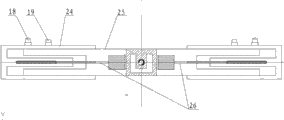
图4(c)为吊具支撑臂和伸缩臂结构示意图。
图5为竖直驱动装置结构示意图。
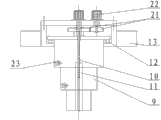
其中,1为倒U型吊具,2为辅助旋转机构,3为辅助轮,4为工字型导轨,5为水平驱动轮,6为水平驱动电机,7为控制箱体,8为承载支架,9为方形伸缩筒,10为竖直丝杠,11为滑块,12为滚珠,13为连接臂,14为支撑架,15为支撑滚轮,16为摩擦驱动轮,17为旋转驱动电机,18为顶针,19为限位块,20为圆弧轨道,21为齿轮,22为驱动电机,23为滚轮,24为伸缩臂,25为支撑臂,26为水平丝杠。
具体实施方式
下面结合附图对本发明作进一步说明。
图1为多自由度自动随行小车系统结构图,其中图1(a)为主视图,图1(b)为左视图,本发明包括控制箱体7,控制箱体7外缘上套有承载支架8,承载支架8上的十字型连接臂13(如图2所示)通过水平驱动装置悬挂在小车两侧的工字型导轨4上。所述的水平驱动装置包括水平驱动电机6、水平驱动轮5、辅助轮3,水平驱动轮5与水平驱动电机6连接,卡在工字型导轨4的凹槽里,辅助轮3安装在工字型导轨4的下方。控制箱体7通过竖直驱动装置连接有辅助旋转机构2,构成转动副。
辅助旋转机构2如图3所示,包括支撑架14、支撑滚轮15、旋转驱动电机17、与旋转驱动电机17相连的摩擦驱动轮16;倒U型吊具1上的圆弧轨道20安装在支撑滚轮15之间,辅助旋转机构2的摩擦驱动轮16和支撑架14分别与倒U型吊具1的上圆弧面和下圆弧面接触,倒U型吊具1能够绕x轴0o~45o正、反两个方向连续旋转。
如图4(a)(b)(c)所示,倒U型吊具1上的伸缩臂24和支撑臂25能够分别在电机及水平丝杠26的作用下,进行水平伸缩,顶针18和限位块19用来限制和固定车身,保证在旋转过程中的安全性,从而满足多车型混线生产的要求。
图5为竖直驱动装置结构示意图,包括驱动电机22、伸缩筒9、竖直丝杆10与滑块11,控制箱体7内的驱动电机22通过竖直丝杆10与伸缩筒9内部的滑块11连接,滑块11与辅助旋转机构2刚性连接。在电机和竖直丝杠10的作用下,倒U型吊具1可在竖直方向移动。
所述的伸缩筒9为台阶式伸缩筒,内壁安装有滚轮23,保证伸缩筒9伸缩运动平稳。
伸缩筒9与承载支架8通过滚珠12构成转动副,通过齿轮21传动,自动随行小车可绕z轴正、反两个方向在一定角度范围内连续旋转。
此实施实例的工作过程描述如下:
通过顶针与限位块将车身固定在倒U型吊具上,在水平驱动轮及辅助轮的作用下,沿着轨道将车身输送到固定的工位点。如果在装配过程中需要调节高度,竖直丝杠在电机的作用下,通过滑块来调节倒U型吊具的高度,此时方形伸缩筒可以保证自动随行小车平稳升降。如果需要调节装配角度,主摩擦轮在电机的作用下,提供摩擦驱动力,驱动倒U型吊具在0o~45o的角度范围内旋转,其中支承滚轮与圆弧轨道接触,提供支撑力及制动力,支撑架保证了倒U型吊具的可靠性。如果需要调节装配方向,齿轮在电机的作用下,通过方形伸缩筒使倒U型吊具绕z轴正、反两个方向在一定角度范围内旋转。如果在多车型混线生产的场合,自动随行小车在电机和水平丝杠的作用下,通过支撑臂和可伸缩臂的伸缩,调节吊具以适合不同车身的输送。此外,自行小车的水平移动、竖直移动、绕x轴的旋转、绕z轴的旋转四个运动相互独立、互不干涉。
本发明具体应用途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进,这些改进也应视为本发明的保护范围。
Claims (10)
1.一种多自由度自动随行小车,包括承载支架(8),承载支架(8)上装有控制箱体(7),承载支架(8)外缘上有连接臂(13),连接臂(13)通过水平驱动装置悬挂在小车两侧的工字型导轨(4)上,提供水平方向自由度,其特征在于:控制箱体(7)通过竖直驱动装置连接有辅助旋转机构(2),提供竖直方向自由度;竖直驱动装置上方与承载支架(8)连接构成转动副,通过跑迷宫绕Z轴旋转自由度;辅助旋转机构(2)包括支撑架(14)、旋转驱动电机(17)、与旋转驱动电机(17)相连的摩擦驱动轮(16);支撑架(14)上挂有倒U型吊具(1),倒U型吊具(1)上方圆弧轨道(20)与摩擦驱动轮(16)相接触,提供绕X轴旋转自由度。
2.根据权利要求1所述的多自由度自动随行小车,其特征在于:所述的竖直驱动装置包括驱动电机(22)、伸缩筒(9)、竖直丝杆(10)与滑块(11),其中,控制箱体(7)通过竖直丝杆(10)与伸缩筒(9)内部的滑块(11)连接,滑块(11)与辅助旋转机构(2)刚性连接。
3.根据权利要求2所述的多自由度自动随行小车,其特征在于:所述的伸缩筒(9)为台阶式伸缩筒,内壁安装有滚轮(23)。
4.根据权利要求2所述的多自由度自动随行小车,其特征在于:所述的伸缩筒(9)与承载支架(8)通过滚珠(12)构成转动副,驱动电机(22)通过齿轮组(21)带动滚珠(12)和伸缩筒(9)旋转。
5.根据权利要求1或2所述的多自由度自动随行小车,其特征在于:所述的辅助旋转机构(2)装有两个支撑滚轮(15),倒U型吊具(1)上的圆弧轨道(20)安装在两个支撑滚轮(15)之间。
6.根据权利要求1或2所述的多自由度自动随行小车,其特征在于:所述的倒U型吊具(1)的两个底脚分别装有支撑臂(25),支撑臂(25)两端通过电机和水平丝杆(26)分别连接有伸缩臂(24)。
7.根据权利要求6所述的多自由度自动随行小车,其特征在于:所述的伸缩臂(24)上放装有固定工件的顶针(18)和限位块(19)。
8.根据权利要求1或2所述的多自由度自动随行小车,其特征在于:所述的水平驱动装置包括水平驱动电机(6)、水平驱动轮(5),水平驱动轮(5)与水平驱动电机(6)连接,卡在工字型导轨(4)的凹槽里。
9.根据权利要求8所述的多自由度自动随行小车,其特征在于:所述的水平驱动装置还设有辅助轮(3),安装在工字型导轨(4)的下方。
10.根据权利要求1或2所述的多自由度自动随行小车,其特征在于:所述的连接臂(13)为十字型。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201310480360.1A CN103523478B (zh) | 2013-10-15 | 2013-10-15 | 一种多自由度自动随行小车 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201310480360.1A CN103523478B (zh) | 2013-10-15 | 2013-10-15 | 一种多自由度自动随行小车 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN103523478A true CN103523478A (zh) | 2014-01-22 |
| CN103523478B CN103523478B (zh) | 2016-08-10 |
Family
ID=49925914
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201310480360.1A Active CN103523478B (zh) | 2013-10-15 | 2013-10-15 | 一种多自由度自动随行小车 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN103523478B (zh) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106628895A (zh) * | 2016-11-08 | 2017-05-10 | 天奇自动化工程股份有限公司 | 重载自行小车输送装置 |
| CN108820712A (zh) * | 2018-06-26 | 2018-11-16 | 深圳市易玛克科技有限公司 | 单驱动多级伸缩装置 |
| CN109083393A (zh) * | 2018-09-11 | 2018-12-25 | 中建三局第建设工程有限责任公司 | 齿条工字型导轨及升降脚手架 |
| CN109115873A (zh) * | 2018-07-27 | 2019-01-01 | 中国工程物理研究院化工材料研究所 | 一种用于复杂构形回转体超声检测的环形多轴扫查装置 |
| CN109592554A (zh) * | 2018-12-29 | 2019-04-09 | 合肥市春华起重机械有限公司 | 一种维修吊及轨道式集装箱门式起重机 |
| CN111392350A (zh) * | 2020-03-16 | 2020-07-10 | 杭州博力液控科技有限公司 | 一种多自由度装载装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03157259A (ja) * | 1989-11-13 | 1991-07-05 | Nissei Ltd | 自動無人トロリコンベア式搬送設備 |
| DE4326563A1 (de) * | 1993-08-07 | 1995-02-09 | Rainer F Tracksdorf | Fördereinrichtung für Fahrzeugkarosserien |
| CN201010327Y (zh) * | 2006-12-31 | 2008-01-23 | 王树生 | 三节伸缩式转向架移动吊挂装置 |
| JP2010089903A (ja) * | 2008-10-08 | 2010-04-22 | Nakanishi Metal Works Co Ltd | チルトハンガーを備えた搬送車 |
| CN102424253A (zh) * | 2011-08-16 | 2012-04-25 | 江苏天奇物流系统工程股份有限公司 | 自行小车输送系统 |
| CN102991979A (zh) * | 2012-11-30 | 2013-03-27 | 湖北华昌达智能装备股份有限公司 | 自行小车系统 |
-
2013
- 2013-10-15 CN CN201310480360.1A patent/CN103523478B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03157259A (ja) * | 1989-11-13 | 1991-07-05 | Nissei Ltd | 自動無人トロリコンベア式搬送設備 |
| DE4326563A1 (de) * | 1993-08-07 | 1995-02-09 | Rainer F Tracksdorf | Fördereinrichtung für Fahrzeugkarosserien |
| CN201010327Y (zh) * | 2006-12-31 | 2008-01-23 | 王树生 | 三节伸缩式转向架移动吊挂装置 |
| JP2010089903A (ja) * | 2008-10-08 | 2010-04-22 | Nakanishi Metal Works Co Ltd | チルトハンガーを備えた搬送車 |
| CN102424253A (zh) * | 2011-08-16 | 2012-04-25 | 江苏天奇物流系统工程股份有限公司 | 自行小车输送系统 |
| CN102991979A (zh) * | 2012-11-30 | 2013-03-27 | 湖北华昌达智能装备股份有限公司 | 自行小车系统 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106628895A (zh) * | 2016-11-08 | 2017-05-10 | 天奇自动化工程股份有限公司 | 重载自行小车输送装置 |
| CN108820712A (zh) * | 2018-06-26 | 2018-11-16 | 深圳市易玛克科技有限公司 | 单驱动多级伸缩装置 |
| CN109115873A (zh) * | 2018-07-27 | 2019-01-01 | 中国工程物理研究院化工材料研究所 | 一种用于复杂构形回转体超声检测的环形多轴扫查装置 |
| CN109115873B (zh) * | 2018-07-27 | 2020-11-03 | 中国工程物理研究院化工材料研究所 | 一种用于复杂构形回转体超声检测的环形多轴扫查装置 |
| CN109083393A (zh) * | 2018-09-11 | 2018-12-25 | 中建三局第建设工程有限责任公司 | 齿条工字型导轨及升降脚手架 |
| CN109592554A (zh) * | 2018-12-29 | 2019-04-09 | 合肥市春华起重机械有限公司 | 一种维修吊及轨道式集装箱门式起重机 |
| CN109592554B (zh) * | 2018-12-29 | 2020-05-05 | 合肥市春华起重机械有限公司 | 一种维修吊及轨道式集装箱门式起重机 |
| CN111392350A (zh) * | 2020-03-16 | 2020-07-10 | 杭州博力液控科技有限公司 | 一种多自由度装载装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103523478B (zh) | 2016-08-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103523478B (zh) | 一种多自由度自动随行小车 | |
| CN105114015B (zh) | 举升式液压动力猫道系统 | |
| WO2017071053A1 (zh) | 变坡度斜向运行容器自动调平装置及方法 | |
| CN106892360B (zh) | 适用于大型盾构机的卷扬式管片吊机 | |
| CN110655015A (zh) | 一种用于地铁隧道维护的无轨自行式平台车 | |
| CN104440490A (zh) | 一种钢管自动除锈机 | |
| CN101822512B (zh) | 高层建筑壁面清洗机器人移动机构 | |
| CN107591728B (zh) | 架空输电线路地线全程自动移动机构、巡检机器人及方法 | |
| CN203382207U (zh) | 多节联动提升机械手 | |
| CN109748089A (zh) | 一种倒挂桁架机器人 | |
| CN206298322U (zh) | 一种吊装行走装置 | |
| CN108772806A (zh) | 一种筒体对接装置 | |
| CN205132927U (zh) | 一种行走机构及具有该行走机构的工程机械 | |
| CN103697306A (zh) | 升降回转装置 | |
| CN102408069A (zh) | 轨道式龙门吊车 | |
| CN204724750U (zh) | 一种龙门式c型钢堆码系统 | |
| CN106743250A (zh) | 一种单桩转运系统 | |
| CN201258036Y (zh) | 汽车车身总成下线装置 | |
| CN102615407B (zh) | 一种双翼行走升降平台 | |
| CN108975199A (zh) | 一种快速运行并高精度定位的自动升降平台及升降机 | |
| CN105523484B (zh) | 一种隧道救济方法及其装置 | |
| CN205089243U (zh) | 举升式液压动力猫道系统 | |
| CN204819899U (zh) | 一种牵引小车驱动的运输料斗 | |
| CN103241556B (zh) | 塔旋式多臂全自动码坯机 | |
| CN209193389U (zh) | 一种盾构机管片的吊机结构 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant |