CN103237511A - 医疗用处置工具和机械手 - Google Patents
医疗用处置工具和机械手 Download PDFInfo
- Publication number
- CN103237511A CN103237511A CN2011800566127A CN201180056612A CN103237511A CN 103237511 A CN103237511 A CN 103237511A CN 2011800566127 A CN2011800566127 A CN 2011800566127A CN 201180056612 A CN201180056612 A CN 201180056612A CN 103237511 A CN103237511 A CN 103237511A
- Authority
- CN
- China
- Prior art keywords
- functional unit
- arm
- pliers
- turning cylinder
- disposal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 239000011248 coating agent Substances 0.000 claims description 7
- 238000000576 coating method Methods 0.000 claims description 7
- 239000011159 matrix material Substances 0.000 description 13
- 238000001514 detection method Methods 0.000 description 4
- 238000001356 surgical procedure Methods 0.000 description 4
- 239000012467 final product Substances 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 238000003466 welding Methods 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 208000034888 Needle issue Diseases 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000008676 import Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 230000001225 therapeutic effect Effects 0.000 description 1
Images



Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Master-slave robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2901—Details of shaft
- A61B2017/2902—Details of shaft characterized by features of the actuating rod
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2932—Transmission of forces to jaw members
- A61B2017/2939—Details of linkages or pivot points
- A61B2017/294—Connection of actuating rod to jaw, e.g. releasable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0801—Prevention of accidental cutting or pricking
- A61B2090/08021—Prevention of accidental cutting or pricking of the patient or his organs
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Robotics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Ophthalmology & Optometry (AREA)
- Surgical Instruments (AREA)
Abstract
一种医疗用处置工具(1),其包括:处置部(10);操作部件(20),其至少一部分具有挠性,且本身的末端部与处置部(10)的基端部连接;以及护套部(30),其具有挠性,且操作部件(20)以在长度方向上能够进退的方式贯穿插入到该护套部(30)中,操作部件(20)从末端起预定长度的范围被设为相比于其他部位具有较高的刚性的硬质部(20A),处置部(10)与操作部件(20)的连接部位(17)在操作部件(20)后退到最大程度的状态下位于护套部(30)以外,硬质部(20A)的长度被设定为在操作部件(20)前进到最大程度的状态下其他的部位不露出到护套部(30)以外。
Description
技术领域
本发明涉及医疗用处置工具以及具有该医疗用处置工具的机械手。本申请主张基于2010年11月30日在日本申请的特愿2010-267775号的优先权,在此引用其内容。
背景技术
以往,在医疗领域中,使用把持活体组织和手术器具等进行手术的医疗用处置工具。这些医疗用处置工具例如安装在构成主从方式的医疗用机械手系统的机械手上,或者贯穿插入到内窥镜的钳子用通道中,被导入患者等的体腔内,被使用于各种手术中。
在专利文献1中,作为医疗用处置工具的一种,记载有具有开闭自如的钳子部的把持钳子。线经由连杆机构与钳子部连接,将线贯穿插入到螺旋护套中。当推拉线而使其在长度方向上进退时,钳子部进行开闭。
现有技术文献
专利文献
专利文献1:日本实公平6-1696号公报
发明内容
发明要解决的问题
在专利文献1记载的把持钳子中,在使线后退到最大程度的状态下,连杆机构与线的连接部位位于护套内。该连接部位的径向尺寸比线单独的径向尺寸大,因此在这样的结构中,需要选择可以收纳连接部位的螺旋护套,难以使处置工具小径化。
本发明的目的在于提供一种容易小径化的医疗用处置工具。
此外,本发明的另一目的在于提供一种容易将在体腔内进行手术的部分小径化的机械手。
用于解决问题的手段
本发明的第一方式的医疗用处置工具具有:处置部,其具有通过钳子转动轴以可以彼此相对转动的方式连接的一对钳子片;操作部件,其至少一部分具有挠性,并且本身的末端部与所述处置部的基端部连接;以及护套部,其具有挠性,并且所述操作部件以在长度方向上能够进退的方式贯穿插入到该护套部中,所述操作部件从末端起预定长度的范围被设为相比于其他部位具有更高刚性的硬质部,所述处置部与所述操作部件的连接部位被设定为,所述操作部件在后退到最大程度的状态下位于所述护套部以外,所述硬质部的长度被设定为,在所述操作部件前进到最大程度的状态下所述其他部位不露出到所述护套部以外。
优选的是,所述硬质部是通过在所述操作部件的表面实施涂层而形成的。
优选的是,本发明的第二方式的机械手,具有本发明的第一方式的医疗用处置工具。
优选的是,所述机械手还具有处置部转动机构,该处置部转动机构以处置部转动轴为中心使所述处置部转动,所述硬质部与所述其他部位的边界构成为:在所述护套部为被设为直线状且所述操作部件后退到最大程度的状态下,比所述处置部转动轴更接近所述处置部。
发明的效果
根据本发明的医疗用处置工具,能够容易地进行小径化。
此外,根据本发明的机械手,能够容易地将体腔内进行手术的部分小径化,从而适当地进行手术。
附图说明
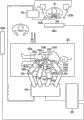
图1是示出应用本发明的医疗用处置工具的医疗用机械手系统的结构的一例的图。
图2是示出该医疗用处置工具的末端侧的图。
图3是示出该医疗用处置工具的内部的截面图。
图4是示出使用该医疗用处置工具时的动作的图。
图5是示出处置部被操作而摆动到极限的状态的图。
图6是示出该医疗用处置工具的变形例中的操作部件的图。
图7是示出该医疗用处置工具的变形例中的操作部件的图。
图8是示出该医疗用处置工具的变形例中的操作部件的图。
具体实施方式
参照图1至图8,对本发明的第一实施方式进行说明。首先,对应用本实施方式的医疗用处置工具(以下,简称为“处置工具”。)和机械手的医疗用机械手系统的一例进行说明。
图1是示出医疗用机械手系统的一例的图,示出主从方式的医疗用机械手系统。主从方式的医疗用机械手系统是指具有由主臂和从臂构成的两种臂、且以跟随主臂的动作的方式远程控制从臂的系统。能够应用本实施方式的机械手作为该从臂。
图1所示的医疗用机械手系统具有手术台100、从臂(机械手)200a~200d、从控制电路400、主臂500a、500b、操作部600、输入处理电路700、图像处理电路800以及显示器900a、900b。
手术台100是载置作为观察/处置对象的患者P的台。在手术台100的附近,设置有多个从臂200a、200b、200c、200d。另外,也可以将从臂200a~200d设置在手术台100上。
各从臂200a、200b、200c、200d分别构成为具有多个多自由度关节。各从臂通过使各多自由度关节弯曲,相对于载置于手术台100上的患者P,对安装于从臂200a~200d的末端侧(设为面向患者P的体腔的一侧)的处置工具等进行定位。通过未图示的动力部个别地驱动各多自由度关节。例如可以使用具有伺服机构的电机(伺服电机)作为动力部,该电机具有增量式编码器和减速器等。通过从控制电路400进行各从臂的动作控制。
从臂200a~200d具有用于驱动所安装的处置工具240a~240d的多个动力部(未图示)。该动力部例如也可以使用伺服电机。通过从控制电路400进行该动作控制。
在驱动从臂200a~200d的动力部的情况下,通过位置检测器检测动力部的驱动量。将来自位置检测器的检测信号输入到从控制电路400中,根据该检测信号,在从控制电路400中检测从臂200a~200d的驱动量。
手术用动力传输适配器(以下,简称为“适配器”。)220a、220b、220c、220d介于从臂200a、200b、200c、200d与处置工具240a、240b、240c、240d之间,并且分别连接从臂200a、200b、200c、200d与处置工具240a、240b、240c、240d。适配器220a~220d构成为:分别具有直动机构,通过直动运动将在对应的从臂的动力部中产生的动力传递到对应的处置工具中。
从控制电路400构成为例如具有CPU和存储器等。从控制电路400存储有用于进行从臂200a~200d的控制的预定程序,并根据来自输入处理电路700的控制信号,控制从臂200a~200d或者处置工具240a~240d的动作。即,从控制电路400基于来自输入处理电路700的控制信号,确定由操作者Op操作的主臂的操作对象的从臂(或者处置工具)。而且,运算使确定的从臂等进行与操作者Op对主臂的操作量对应的动作所需要的驱动量。
然后,从控制电路400根据计算出的驱动量来控制主臂的操作对象的从臂等的动作。这时,从控制电路400将驱动信号输入到对应的从臂。同时,根据检测信号控制驱动信号的大小和极性,使得操作对象的从臂的驱动量成为目标驱动量,其中,该检测信号是根据对应的从臂的动作从动力部的位置检测器输入的。
主臂500a、500b由多个连杆机构构成。在构成连杆机构的各连杆中例如设置有增量式编码器等位置检测器。通过该位置检测器检测各连杆的动作,由此,在输入处理电路700中检测主臂500a、500b的操作量。
图1的医疗用机械手系统使用两只主臂500a、500b来操作4只从臂。因此,需要适当地切换主臂的操作对象的从臂。例如通过操作者Op对操作部600的操作来进行这种切换。当然,如果通过将主臂的只数与从臂的只数设为相同而使操作对象1对1地对应,则不需要这种切换。
操作部600具有用于切换主臂500a、500b的操作对象的从臂的切替按钮、变更主与从的动作比率的缩放比例变更开关、用于使系统紧急停止的脚踏开关等各种操作部件。在由操作者Op操作了构成操作部600的任意的操作部件的情况下,从操作部600向输入处理电路700中输入与对应的操作部件的操作对应的操作信号。
输入处理电路700解析来自主臂500a、500b的操作信号和来自操作部600的操作信号。然后,根据操作信号的解析结果生成用于控制本医疗用机械手系统的控制信号并输入到从控制电路400中。
图像处理电路800实施用于显示由从控制电路400输入的图像信号的各种图像处理,并且生成用于在操作者用显示器900a、助手用显示器900b中显示的图像数据。操作者用显示器900a和助手用显示器900b例如由液晶显示器构成,显示基于图像数据的图像,该图像数据是依照经由观测器取得的图像信号在图像处理电路800中生成的。
在如以上那样构成的医疗用机械手系统中,当操作者Op操作主臂500a、500b时,则对应的从臂和安装在该从臂上的处置工具与主臂500a,500b的动作相对应地进行动作。由此,能够对患者P进行所希望的手术。
接着对本实施方式的处置工具1进行说明。图2是示出处置工具1的末端侧的图。图3是示出处置工具1的内部的截面图。处置工具1能够作为上述处置工具240a~240d安装在从臂200a~200d上。如图2和图3所示,处置工具1具有用于进行各种处置的处置部10、用于操作处置部10的操作部件20、贯穿插入有操作部件20的护套部30。
处置部10具有由第1钳子片11和第2钳子片12构成的一对钳子片。第1钳子片11和第2钳子片12通过钳子转动轴13以可以彼此相对转动的方式连接,比钳子转动轴13更靠末端侧的区域为把持部14,该把持部14进行开闭来把持体内组织和手术器具等对象物。
连杆部件15经由连杆转动轴15A以可以相对于第1钳子片11转动的方式与第1钳子片11的基端侧(把持部14的相反侧)连结。同样,连杆部件16经由连杆转动轴16A以可以相对于第2钳子片12转动的方式与第2钳子片12的基端侧连结。连杆转动轴15A、16A的轴线均与钳子转动轴13的轴线平行。
连杆部件15和16的基端侧经由连接转动轴17A可转动地与连接部件17连接。连接转动轴17A的轴线与钳子转动轴13和连杆转动轴15A、16A平行,各连杆部件15、16相对于连接部件17可以相对地转动。
连接部件17由金属等形成。连接部件17在末端侧具有连接转动轴17A。连接部件17的基端侧为形成为大致圆筒状的操作部件连接部17B,操作部件20的末端部插入在操作部件连接部17B内并通过焊接或粘接、铆接等连接成一体。
操作部件20是线状的部件。操作部件20是同时具有能够将基端部的进退操作传递到末端部的程度的刚性和能够跟随后述的处置部10的摆动动作而弯曲的程度的挠性的部件。本实施方式的操作部件20是将金属丝绞合而成的金属线。例如,将丝径0.07毫米(mm)的不锈钢制造的9根丝绞合形成0.3mm左右的外径。
在操作部件20的末端部实施了用于增大刚性的涂层。由此操作部件的末端部成为增加了刚性后的硬质部20A。优选比较硬的金属材料等作为用于形成硬质部20A的涂层的材料。
硬质部20A被插入到连接部件17的操作部件连接部17B,由此操作部件20与处置部10基端侧的连接部件17连接为一体。操作部件20的轴线方向上的硬质部20A的尺寸被设定为预定的长度。在操作部件20与连接部件17被连接为一体的状态下,硬质部20A的一部分存在于操作部件连接部17B以外。后面详细地对该预定的长度进行叙述。
护套部30具有形成为筒状的护套31。操作部件20以可以进退的方式贯穿插入在护套31中。在本实施方式中,使用具有挠性的公知的螺旋护套作为护套31。
在护套31的末端部安装有由金属等形成的罩部件32。
罩部件32覆盖着各钳子片11、12的基端侧、各连杆部件15、16以及连接部件17。在罩部件32上还固定有钳子转动轴13。由此,钳子转动轴13被固定成相对于护套部30不进行移动。
在操作部件20移动到最基端侧(后退)的状态下,连接部件17位于护套部30以外。即,作为操作部件20与连接部件17的连接部位的操作部件连接部17B被设定为即使操作部件20最大限度地后退也不会进入护套31内。
此外,在操作部件20移动到最末端侧(前进)的状态下,仅硬质部20A露出护套31的末端侧。也就是说,未实施涂层的通常部20B不突出到比护套31的末端更靠前的位置,不露出到护套部30的外面。
大致圆筒形的操作部件连接部17B的轴线方向上的尺寸、操作部件20的长度以及操作部件20的轴线方向上的硬质部20A的尺寸被设定为满足上述的两个条件。
针对上述那样构成的处置工具1的使用时的动作,以安装于上述从臂200a~200d之一的情况为例进行说明。
首先,操作者Op将处置工具1安装在所希望的从臂上,并将操作部件20的基端部与该从臂的适配器连接。罩部件32是从臂的一部分,被固定于未图示的基体上。基体可以以预定的基体转动轴(处置部转动轴)为中心进行转动。通过使基体转动,能够使罩部件32以基体转动轴为中心进行转动,进行处置部10的摆动动作而改变把持部14的方向。
使基体转动的线等操作部件与设置于从臂上的电机等动力部连接。即,从臂具有包含基体和动力部的处置部转动机构。
当操作者Op在对应的主臂上进行预定的操作时,经由从控制电路400a驱动该从臂的动力部。在该动力部中产生的动力经由适配器转换为直动运动,通过该直动运动进行操作部件20的进退。
当操作部件20前进时,与操作部件20连接的连接部件17相对于护套部30前进。但是,由于钳子转动轴13固定于罩部件32上,因此钳子转动轴13相对护套部30不前进。由此,连接转动轴17A靠近钳子转动轴13,连杆部件15、16相对于各钳子片11、12和连接部件17进行转动。结果是,第1钳子片11和第2钳子片12以钳子转动轴13为中心进行转动,如图4所示,把持部14打开。
当操作部件20后退时,连接转动轴17A离开钳子转动轴13,通过与上述相反的动作使把持部14闭合。因此,通过使操作部件20进退来开闭把持部14。结果是,能够把持对象组织,或者把持弯曲针和缝合线等在处置中需要的部件等,进行所希望的手术。
在改变把持部14的方向时,经由从臂通过动力部使基体转动。于是,固定于基体的罩部件32以基体转动轴为中心转动,从而进行处置部10的摆动动作。
图5是示出处置部10的摆动动作进行到极限的状态的图。在本实施方式中,当将处置工具1安装在从臂时,基体转动轴X1与钳子转动轴13的轴线平行。此外,基体转动轴X1位于与护套部30为直线状时的护套部30的中心轴线交差的位置。而且,硬质部20A的长度被设定为,在护套部30为直线状且操作部件20后退到最后的状态下,操作部件20中的硬质部20A与通常部20B的边界B1位于比基体转动轴X1更靠末端侧、且更靠近处置部10的位置。
如以上说明的那样,根据本实施方式的处置工具1,作为处置部10与操作部件20的连接部位的操作部件连接部17B被设定于即使在操作部件20后退到最后的状态下也不会进入护套部30的内部的位置。因此,可以只考虑操作部件20的直径来设定护套部30的内径。结果是,能够将处置工具1进一步小径化,并且能够缩小护套部30的内径与操作部件20的外径之差从而缩小两者之间的间隙,适当地防止操作部件20在护套部30内发生纵向弯曲。
此外,硬质部20A的长度被设定为,在操作部件20前进到最前面的状态下仅硬质部20A位于护套部30以外。因此,在打开处置部10的一对钳子片11、12时,能够适当地抑制操作部件20在护套部30以外发生纵向弯曲,从而能够向处置部10可靠地传递操作。
另外,由于通过在操作部件20的一部分实施涂层而形成有硬质部20A,故硬质部容易形成而能够成为容易制造的处置工具。
在本实施方式中,如上所述,说明了通过涂层在操作部件的一部分上形成硬质部的例子,但是形成硬质部的方法并不限定于此。
例如,也可以是如图6所示的变形例那样,在构成操作部件的通常部的绞合线21的一个端部,通过焊接等连接刚性更高的单线22或杆等作为硬质部。
此外,也可以是如图7所示的变形例那样,在构成通常部的绞合线23的一个端部,通过焊接等连接由比绞合线23更粗的丝构成的绞合线24作为硬质部。
以上,对本发明的一个实施方式进行了说明,但是本发明的技术范围并不限定于上述实施方式,在不脱离本发明的宗旨的范围内,可以对各构成要素施加或删除各种变更。
例如,在上述的实施方式中,以与机械手连接的处置工具为例进行了说明,但是除此以外,也可以构成为例如贯穿插入到内窥镜的钳子通道中而被使用的内窥镜用处置工具。该情况下,例如,设置具有操作部主体和以可相对于操作部主体滑动的方式安装的滑动器的公知操作部,将操作部主体与护套部的基端连接,将操作部件的基端部与滑动器连接即可。
此外,在实施方式的处置工具的操作部件20中,也可以是如图8所示的变形例那样,还在与处置部10连接的端部的相反侧的端部设置硬质部20A。这样,即便是在操作部件20后退到最后的状态下操作部件20的基端侧露出到护套部30以外的结构,也能够适当地抑制当从该状态使操作部件20前进时发生纵向弯曲,从而更可靠地向处置部传递操作。
另外,在本实施方式的处置工具中,处置部也可以不具备连杆部件。该情况下,具有两根操作部件,并将设置有硬质部的端部逐根地连接到各自的钳子片的基端部即可。由此,通过使两根操作部件进退能够使一对钳子片开闭。此时,也可以将两根操作部件的基端侧绞合或捆绑而成为一体,从而容易地进行进退操作。
此外,也可以是,在本实施方式的处置工具中,一对钳子片中的一方被固定,以便不绕钳子转动轴进行转动。即使在该情况下,通过将具有硬质部的操作部件与可以绕钳子转动轴转动的另一方的钳子片连接,也能够以钳子转动轴为中心使一对钳子片相对转动,从而适当地开闭处置部。
此外,在上述的实施方式中,说明了将处置部转动机构设置在作为机械手的从臂侧的例子,但是处置部转动机构也可以设置在处置工具侧。该情况下,较大地形成罩部件,并在满足上述条件的位置设置处置部转动轴即可。
产业上的可利用性
根据本实施方式的处置工具,作为处置部与操作部件的连接部位的操作部件连接部被设定于即使在操作部件后退到最后的状态下也不会进入护套部内部的位置。因此,可以仅考虑操作部件的直径来设定护套部的内径,能够容易地进行医疗用处置工具的小径化。
标号说明
1:医疗用处置工具
10:处置部
11:第1钳子片
12:第2钳子片
13:钳子转动轴
20:操作部件
20A:硬质部
22:单线(硬质部)
23:绞合线(硬质部)
30:护套部
200a、200b、200c、200d:从臂(机械手)
X1:处置部转动轴
Claims (4)
1.一种医疗用处置工具,其包括:
处置部,其具有被连接为能够以钳子转动轴为中心相对转动的一对钳子片;
操作部件,其至少一部分具有挠性,并且本身的末端部与所述处置部的基端部连接;以及
护套部,其具有挠性,并且所述操作部件以在长度方向上能够进退的方式贯穿插入到该护套部中,
所述操作部件从末端起预定长度的范围被设为相比于其他部位具有更高刚性的硬质部,
所述处置部与所述操作部件的连接部位被设定为,所述操作部件在后退到最大程度的状态下位于所述护套部以外,
所述硬质部的长度被设定为,在所述操作部件前进到最大程度的状态下所述其他部位不露出到所述护套部以外。
2.根据权利要求1所述的医疗用处置工具,其中,
所述硬质部是通过在所述操作部件的表面实施涂层而形成的。
3.一种机械手,其具有权利要求1或2所述的医疗用处置工具。
4.根据权利要求3所述的机械手,其中,
该机械手还具有使所述处置部以处置部转动轴为中心转动的处置部转动机构,
所述硬质部与所述其他部位的边界构成为:在所述护套部为直线状且所述操作部件后退到最大程度的状态下,相比所述处置部转动轴更接近所述处置部。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010267775A JP2012115471A (ja) | 2010-11-30 | 2010-11-30 | 医療用処置具およびマニピュレータ |
| JP2010-267775 | 2010-11-30 | ||
| PCT/JP2011/076782 WO2012073738A1 (ja) | 2010-11-30 | 2011-11-21 | 医療用処置具およびマニピュレータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN103237511A true CN103237511A (zh) | 2013-08-07 |
Family
ID=46127112
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2011800566127A Pending CN103237511A (zh) | 2010-11-30 | 2011-11-21 | 医疗用处置工具和机械手 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20120136370A1 (zh) |
| EP (1) | EP2630925A4 (zh) |
| JP (1) | JP2012115471A (zh) |
| CN (1) | CN103237511A (zh) |
| WO (1) | WO2012073738A1 (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103750901A (zh) * | 2014-02-14 | 2014-04-30 | 徐美东 | 一种多功能高频切开刀 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014136583A1 (en) | 2013-03-05 | 2014-09-12 | Olympus Corporation | Operation input device and master-slave system |
| JP6141410B2 (ja) * | 2013-03-29 | 2017-06-07 | オリンパス株式会社 | マニピュレータ、マニピュレータシステム及びマニピュレータの作動方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11285497A (ja) * | 1998-04-03 | 1999-10-19 | Asahi Optical Co Ltd | 内視鏡用処置具 |
| US20040193146A1 (en) * | 2001-02-15 | 2004-09-30 | Endo Via Medical, Inc. | Robotically controlled surgical instruments |
| CN101193603A (zh) * | 2005-06-06 | 2008-06-04 | 直观外科手术公司 | 腹腔镜的超声机器人外科手术系统 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS552966Y2 (zh) * | 1974-02-08 | 1980-01-24 | ||
| US4676229A (en) * | 1986-04-09 | 1987-06-30 | Welch Allyn, Inc. | Biopsy channel for an endoscope |
| US5035248A (en) * | 1987-04-23 | 1991-07-30 | Zinnecker Hal P | Polyolefin sheath and silicone O-ring for medical instrument |
| JPH061696Y2 (ja) | 1987-11-28 | 1994-01-19 | オリンパス光学工業株式会社 | 内視鏡用処置具 |
| JPH0347246A (ja) * | 1989-04-13 | 1991-02-28 | Olympus Optical Co Ltd | 内視鏡用処置具 |
| US5228451A (en) * | 1990-05-10 | 1993-07-20 | Symbiosis Corporation | Biopsy forceps device having stiff distal end |
| JP2861640B2 (ja) * | 1992-06-18 | 1999-02-24 | 日本電気株式会社 | ベータバリウムボレイト単結晶の育成方法 |
| US5478350A (en) * | 1994-07-14 | 1995-12-26 | Symbiosis Corporation | Rack and pinion actuator handle for endoscopic instruments |
| US5810876A (en) * | 1995-10-03 | 1998-09-22 | Akos Biomedical, Inc. | Flexible forceps device |
| AU7255896A (en) * | 1995-10-06 | 1997-04-28 | Brian S. Kelleher | Steerable, flexible forceps device |
| US5624379A (en) * | 1995-10-13 | 1997-04-29 | G. I. Medical Technologies, Inc. | Endoscopic probe with discrete rotatable tip |
| US5695521A (en) * | 1996-10-01 | 1997-12-09 | Symbiosis Corporation | Tubular sheath protective insert |
| US5904647A (en) * | 1996-10-08 | 1999-05-18 | Asahi Kogyo Kabushiki Kaisha | Treatment accessories for an endoscope |
| JP3126323B2 (ja) * | 1996-11-01 | 2001-01-22 | 株式会社貝印刃物開発センター | 内視鏡用処置具における処置部の構造 |
| US6338737B1 (en) * | 1997-07-17 | 2002-01-15 | Haviv Toledano | Flexible annular stapler for closed surgery of hollow organs |
| DE59900101D1 (de) * | 1999-04-29 | 2001-06-28 | Storz Karl Gmbh & Co Kg | Medizinisches Instrument zum Präparieren von Gewebe |
| JP3694202B2 (ja) * | 1999-11-18 | 2005-09-14 | ペンタックス株式会社 | 内視鏡用処置具の先端支持部材の製造方法 |
| US6666876B2 (en) * | 2000-02-24 | 2003-12-23 | Hitachi, Ltd. | Forceps and manipulator with using thereof |
| JP2001309920A (ja) * | 2000-02-24 | 2001-11-06 | Hitachi Ltd | 鉗子及びそれを用いたマニピュレータ |
| US6717092B2 (en) * | 2000-08-11 | 2004-04-06 | Pentax Corporation | Method of manufacturing treatment instrument of endoscope |
| JP4014792B2 (ja) * | 2000-09-29 | 2007-11-28 | 株式会社東芝 | マニピュレータ |
| US20030135204A1 (en) * | 2001-02-15 | 2003-07-17 | Endo Via Medical, Inc. | Robotically controlled medical instrument with a flexible section |
| US20040176751A1 (en) * | 2002-08-14 | 2004-09-09 | Endovia Medical, Inc. | Robotic medical instrument system |
| JP4436698B2 (ja) * | 2004-02-25 | 2010-03-24 | オリンパス株式会社 | 高周波処置具 |
| JP2006255257A (ja) * | 2005-03-18 | 2006-09-28 | Olympus Medical Systems Corp | 内視鏡用処置具 |
| WO2007096951A1 (ja) * | 2006-02-21 | 2007-08-30 | Olympus Medical Systems Corp. | 内視鏡システム、及び医療器具 |
| US20070225754A1 (en) * | 2006-03-21 | 2007-09-27 | Ethicon Endo-Surgery, Inc. | Medical instrument having an engagement mechanism |
| US8197396B2 (en) * | 2006-04-26 | 2012-06-12 | Olympus Medical Systems Corp. | Treatment tool for endoscope and medical procedure |
-
2010
- 2010-11-30 JP JP2010267775A patent/JP2012115471A/ja active Pending
-
2011
- 2011-11-21 EP EP11844225.0A patent/EP2630925A4/en not_active Withdrawn
- 2011-11-21 CN CN2011800566127A patent/CN103237511A/zh active Pending
- 2011-11-21 WO PCT/JP2011/076782 patent/WO2012073738A1/ja active Application Filing
- 2011-11-22 US US13/302,034 patent/US20120136370A1/en not_active Abandoned
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11285497A (ja) * | 1998-04-03 | 1999-10-19 | Asahi Optical Co Ltd | 内視鏡用処置具 |
| US20040193146A1 (en) * | 2001-02-15 | 2004-09-30 | Endo Via Medical, Inc. | Robotically controlled surgical instruments |
| CN101193603A (zh) * | 2005-06-06 | 2008-06-04 | 直观外科手术公司 | 腹腔镜的超声机器人外科手术系统 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103750901A (zh) * | 2014-02-14 | 2014-04-30 | 徐美东 | 一种多功能高频切开刀 |
| CN103750901B (zh) * | 2014-02-14 | 2016-01-20 | 徐美东 | 一种多功能高频切开刀 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2630925A4 (en) | 2014-03-19 |
| WO2012073738A1 (ja) | 2012-06-07 |
| JP2012115471A (ja) | 2012-06-21 |
| EP2630925A1 (en) | 2013-08-28 |
| US20120136370A1 (en) | 2012-05-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20200281644A1 (en) | Robotic bi-polar instruments | |
| KR102527450B1 (ko) | 관절형 전기수술 도구 | |
| US10390895B2 (en) | Control of advancement rate and application force based on measured forces | |
| KR102521822B1 (ko) | 전기기계적 수술 시스템 | |
| WO2012124635A1 (ja) | 医療用処置具およびマニピュレータ | |
| US10835310B2 (en) | Electrically-powered surgical systems | |
| JP7085400B2 (ja) | 外科手術システム | |
| US20210085304A1 (en) | Electromechanical surgical system | |
| US10856928B2 (en) | Electrically-powered surgical systems | |
| CN107635504A (zh) | 用于微创切割器械操作的系统和方法 | |
| JP6049585B2 (ja) | 術具 | |
| KR20130109013A (ko) | 다이렉트 풀 수술 기구를 위한 가위 편향 | |
| EP3551115B1 (en) | Surgical tool wrists | |
| WO2014007125A1 (ja) | 手術支援装置 | |
| CN103237511A (zh) | 医疗用处置工具和机械手 | |
| JP5816527B2 (ja) | 医療用処置具およびこれを備えるマニピュレータ | |
| Li et al. | Cadaveric feasibility study of a teleoperated parallel continuum robot with variable stiffness for transoral surgery | |
| CN106388938A (zh) | 一种医疗处置器具 | |
| Song et al. | Development of the dexterous manipulator and the force sensor for minimally invasive surgery | |
| WO2024006890A1 (en) | Jaw member of instrument end effector and related devices, systems and methods |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20130807 |