CN103080851B - 处理盒和成像装置 - Google Patents
处理盒和成像装置 Download PDFInfo
- Publication number
- CN103080851B CN103080851B CN201180042212.0A CN201180042212A CN103080851B CN 103080851 B CN103080851 B CN 103080851B CN 201180042212 A CN201180042212 A CN 201180042212A CN 103080851 B CN103080851 B CN 103080851B
- Authority
- CN
- China
- Prior art keywords
- contact portion
- link
- developing cell
- opening
- handle box
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images































Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G21/00—Arrangements not provided for by groups G03G13/00 - G03G19/00, e.g. cleaning, elimination of residual charge
- G03G21/16—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements
- G03G21/18—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements using a processing cartridge, whereby the process cartridge comprises at least two image processing means in a single unit
- G03G21/1803—Arrangements or disposition of the complete process cartridge or parts thereof
- G03G21/1817—Arrangements or disposition of the complete process cartridge or parts thereof having a submodular arrangement
- G03G21/1825—Pivotable subunit connection
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G2221/00—Processes not provided for by group G03G2215/00, e.g. cleaning or residual charge elimination
- G03G2221/16—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements and complete machine concepts
- G03G2221/18—Cartridge systems
- G03G2221/183—Process cartridge
- G03G2221/1853—Process cartridge having a submodular arrangement
- G03G2221/1861—Rotational subunit connection
Landscapes
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Electrophotography Configuration And Component (AREA)
- Dry Development In Electrophotography (AREA)
Abstract
一种能够安装到成像装置的主组件的处理盒,包括图像承载部件单元、显影单元、相对于图像承载部件轴向在处理盒的端部部分处设在图像承载部件单元和显影单元中的一个中的轴(54L)以及在端部部分处设在另一个单元中、与轴接合以允许显影单元相对于图像承载部件单元的运动的开口(60)。在处理盒安装到主组件的状态下,开口限定接触轴以允许显影单元相对于图像承载部件单元的旋转运动的第一接触部分(60a),并且限定第二接触部分(60b、60c),所述第二接触部分在另一方向上从轴接收法向反作用力(F6c)并且当第二接触部分不接收来自主组件的驱动力时,移动显影单元使得轴和第一接触部分彼此接触。
Description
技术领域
本发明涉及处理盒和成像装置。在本发明中,处理盒指的是通过一体地组装包括图像承载部件的图像承载部件单元和包括显影剂承载部件的显影单元而制备的盒。
顺便提一句,图像承载部件是电子照相感光部件、静电记录介电部件、磁记录部件等。显影剂承载部件承载显影剂并且用显影剂显影通过适当的方法使形成于图像承载部件上的潜像(静电潜像、势像、磁潜像等)显影。
成像装置在记录材料(介质)上形成图像。成像装置的例子可以包括电子照相成像装置。成像装置的主组件指的是排除处理盒之外的成像装置部分。
背景技术
在使用电子照相成像过程的常规成像装置中,采用这样一种处理盒类型,其中感光鼓和作用于感光鼓的处理装置一体地组装到能够可拆卸地安装到成像装置的主组件的盒中。
作为处理盒,这样一种处理盒是众所周知的,其中用于保持感光鼓和清洁装置等的图像承载部件单元和用于保持作为显影剂承载部件的压力件的显影单元由连接部件连接。在该处理盒中,显影单元通过使用连接部件作为旋转运动的轴线(轴)相对于图像承载部件单元被可旋转地支撑并且通过其自身重量或驱策部件(例如弹簧)朝着图像承载部件单元被促动。显影单元中的显影辊能够以一定的压力接触图像承载部件单元中的感光鼓,使得成像装置可以稳定地形成图像。
然而,在这样的处理盒中,由于零部件公差等的影响,用于连接图像承载部件单元和显影单元的连接部件的位置或连接部件接合在其中的孔的位置在一些情况下偏离设计期间的目标尺寸(在下文中被称为基准尺寸)。当连接部件等的位置偏离时,图像承载部件单元和显影单元之间的连接受到影响并且因此存在显影辊施加到感光鼓上的压力也相对于设计值波动的可能性。
由于该原因,在常规处理盒中,如日本特开专利申请(JP-A)Hei08-339149和Hei09-050224中所述,采取这样的对策,即,使将与连接部件接合的孔成形为长形孔。因此,即使在连接部件等的位置偏离基准尺寸的情况下,当连接部件和长形孔彼此接合时长形孔和连接部件之间的接合位置移动,使得可以吸收所导致的位置偏差。因此,显影辊施加于感光鼓的压力得以稳定。
发明内容
本发明提供上述常规结构的进一步改进。
在通过一体地连接显影单元和图像承载部件单元制备的处理盒中,当力从外部施加到处理盒时,在一些情况下显影单元相对于图像承载部件单元运动。在这些情况下,施加到图像承载部件的显影剂承载部件的压力波动。
本发明的主要目的是提供一种能够抑制压力波动的处理盒。
本发明的另一目的是提供一种包括处理盒的成像装置。
根据本发明的方面,提供一种能够可拆卸地安装到成像装置的主组件的处理盒,所述处理盒包括:
(a)图像承载部件单元,所述图像承载部件单元包括可旋转地设置的图像承载部件;
(b)显影单元,所述显影单元包括用于承载显影剂的显影剂承载部件;
(c)轴,所述轴相对于所述图像承载部件的轴向在所述处理盒的端部部分处设在所述图像承载部件单元和所述显影单元中的一个中;以及
(d)开口,所述开口在所述端部部分处设在另一个单元中,与所述轴接合以允许所述显影单元相对于所述图像承载部件单元的运动,
其中所述开口限定第一接触部分,在所述处理盒安装到所述主组件的状态下,所述第一接触部分接触所述轴以允许所述显影单元相对于所述图像承载部件单元的旋转运动,并且所述开口限定第二接触部分,所述第二接触部分在相对于由所述第一接触部分从所述轴接收的法向反作用力的方向倾斜的方向上从所述轴接收法向反作用力,并且当在所述处理盒安装到所述主组件并且不接收来自所述主组件的驱动力的状态下所述第二接触部分接触所述轴时,所述第二接触部分使所述显影单元移动,使得所述轴和所述第一接触部分彼此接触。
根据本发明的另一方面,提供一种用于在记录材料上形成图像的成像装置,所述成像装置包括:
处理盒,所述处理盒能够可拆卸地安装到成像装置的主组件,其中所述处理盒包括:
图像承载部件单元,所述图像承载部件单元包括可旋转地设置的图像承载部件;
显影单元,所述显影单元包括用于承载显影剂的显影剂承载部件;
轴,所述轴相对于所述图像承载部件的轴向在所述处理盒的端部部分处设在所述图像承载部件单元和所述显影单元中的一个中;以及
开口,所述开口在所述端部部分处设在另一个单元中,与所述轴接合以允许所述显影单元相对于所述图像承载部件单元的运动,
其中所述开口限定第一接触部分,在所述处理盒安装到所述主组件的状态下,所述第一接触部分接触所述轴以允许所述显影单元相对于所述图像承载部件单元的旋转运动,并且所述开口限定第二接触部分,所述第二接触部分在相对于由所述第一接触部分从所述轴接收的法向反作用力的方向倾斜的方向上从所述轴接收法向反作用力,并且当在所述处理盒安装到所述主组件并且不接收来自所述主组件的驱动力的状态下所述第二接触部分接触所述轴时,所述第二接触部分使所述显影单元移动,使得所述轴和所述第一接触部分彼此接触;以及
用于传送所述记录材料的传送装置。
当考虑结合附图进行的本发明的优选实施例的以下描述时,本发明的这些和其它目的、特征和优点将变得更明显。
附图说明
图1是实施例1中的成像装置的主组件和处理盒的示意图。
图2是处理盒的放大示意图。
图3是用于示出图像承载部件单元的透视图。
图4和图5是用于示出显影单元的透视图。
图6是用于示出处理盒的框架结构的透视图。
图7的部分(a)和(b)是用于示出图像承载部件单元和显影单元之间的连接部分的示意性透视图。
图8的部分(a)和(c)是比较实施例中的处理盒的示意性示意图。
图9是用于示出比较实施例中的D压力(从显影辊施加到感光鼓)的变化的图形。
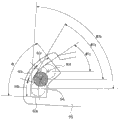
图10的部分(a)和(b)用于示出施加到显影单元的力。
图11是显示比较实施例中的显影单元的图形。
图12是显示比较实施例中的施加到显影单元的力和力的方向的示意图。
图13是显示比较实施例中的D压力的波动的图形。
图14的部分(a)至(c)是显示比较实施例中的开口和连接部件之间的接合位置的示意性示意图。
图15的部分(a)和(b)和图16的部分(a)和(b)是示出实施例1中的连接部件和开口之间的接合的设置的示意性示意图。
图17是用于示出实施例1中的开口的形状的示意图。
图18是显示实施例1中的D压力的波动的图形。
图19是用于示出实施例2中的开口的形状的示意图。
图20是显示实施例2中的D压力的波动的图形。
图21的部分(a)和(b)是用于示出实施例3中的开口的形状的示意图。
图22是显示带有可与开口接合的突起的处理盒的透视图。
图23的部分(a)和(b)是用于示出实施例4中的处理盒的透视图。
图24的部分(a)和(b)是显示实施例5中的显影辊和感光鼓之间的接触的示意图。
图25是显示实施例5中的处理盒的示意图。
图26是用于示出成像装置的主组件的透视图。
图27和28是用于示出鼓单元支撑结构(在驱动侧)的透视图。
图29是用于示出鼓单元支撑结构(在非驱动侧)的透视图。
图30的部分(a)和(b)是显示用于允许安装和拆卸盒的主组件侧导轨的透视图。
图31的部分(a)和(b)是用于示出将盒插入主组件中的插入操作的示意图。
图32的部分(a)和(b)是比较实施例中的显影单元的侧视图。
图33的部分(a)和(b)是实施例1中的盒的侧视图。
图34的部分(a)和(b)是实施例2中的显影单元的侧视图。
具体实施方式
[实施例1]
将通过以待安装到使用电子照相的成像装置主组件的非接触显影型的处理盒作为例子具体地描述本发明。
(总体结构)
图1是该实施例中的成像装置A的主组件1和处理盒的示意图。图2是处理盒2的放大示意图。参考图1和2,下面将描述该实施例中的成像装置A的总体结构和成像过程。
成像装置A是使用电子照相的激光束打印机,其中盒2能够可拆卸地安装到主组件1。
当盒2安装到主组件1时,曝光设备(激光扫描仪单元)3布置在盒2上方。此外,在盒2下方设有片材托盘4,将受到成像的记录材料(片材)P容纳在所述片材托盘中。此外,在主组件1中,沿着片材P的传送方向,布置有拾取辊5a、进给辊5b、传送辊对5c、转印引导件6、转印充电辊7、传送引导件8、定影设备9、排出辊对10、排出托盘等。
(成像过程)
接着,将描述成像过程。基于打印开始信号,作为图像承载部件的鼓状电子照相感光部件(在下文中被称为感光鼓)20在箭头R1的方向上以预定圆周速度(处理速度)被旋转地驱动。偏电压所施加到的充电辊12接触感光鼓20的外周表面,使得感光鼓20的外周表面由充电辊12均匀地充电。
从曝光设备3输出对应于图像信息的时序电数字像素信号而被调制的激光L。激光L从盒2的上表面处的曝光窗口53进入盒2。因此,在感光鼓2的外周表面上,形成对应于图像信息的静电潜像。静电潜像用显影单元40的显影剂T(在下文中被称为调色剂)进行显影以可视化为调色剂图像。
充电辊12设成与感光鼓20接触并且为感光鼓20充电。充电辊12由于感光鼓20的旋转而旋转。显影单元40将调色剂供应到感光鼓20的显影区域以显影形成于感光鼓20上的潜像。
在显影单元40中,显影剂容纳部分(在下文中被称为调色剂室)45中的调色剂T通过搅拌部件43的旋转进给到显影部分(在下文中被称为显影室)44。然后,作为包含磁辊(固定磁体)41a的显影剂承载部件的显影辊41旋转并且由显影剂管制部件(在下文中被称为显影刮刀)42提供摩擦带电电荷的调色剂层形成于显影辊41的表面上。
然后,根据潜像,调色剂转印到感光鼓20上,使得形成调色剂图像,以可视化所述潜像。显影刮刀42确定显影辊41的外周表面处的调色剂量并且将摩擦带电电荷施加到调色剂层。
另一方面,与激光L的输出的定时同步地,容纳在主组件1的下部处的片材P由拾取辊5a、进给辊5b和传送辊对5c从片材托盘4进给。片材P定时地经由转印引导件6供应到感光鼓20和转印充电辊7之间的转印位置。在转印位置处,调色剂图像从感光鼓20相继转印到片材P上。
片材P从感光鼓20分离沿着传送引导件9到达定影设备9。然后,片材P穿过构成定影设备9的定影辊9a和压辊9b之间的夹持部。在夹持部中,执行加压-加热定影过程,使得调色剂图像定影在片材P上。受到调色剂图像定影过程的片材传送到排出辊对10,因此排出到排出托盘11上。
另一方面,在转印之后,转印残余调色剂由清洁刮刀52从感光鼓20的外周表面去除并且然后感光鼓20再次受到从充电开始的成像处理。从感光鼓20去除的残余调色剂储存在图像承载部件单元50的残余调色剂室51e中。充电辊12、显影辊41、清洁刮刀52等是作用于感光鼓20的处理装置。
(图像承载部件单元)
将参考图2和图3具体地描述图像承载部件单元50。图3是用于示出图像承载部件单元50的透视图。
如上所述,由显影单元40显影的调色剂图像在转印部分处转印到片材P上。转印之后留在感光鼓20上的调色剂由清洁刮刀52刮掉并且由接收片14a铲取以收集在残余调色剂室51e中。
残余调色剂室51e由鼓框架51和在预定位置用双面胶带等固定在鼓框架51上的密封部件14e构成。
清洁刮刀52用螺钉58固定在鼓框架51的预定位置。此外,作为感光鼓20上的沉积物(例如调色剂)的擦拭部件,密封部件14d用双面胶带固定在鼓框架51上。
电极15和充电辊支承部13(13L和13R)接合到鼓框架51中,并且轴12a(12aL和12aR)接合到充电辊支承部13(13L和13R)中。
在感光鼓20的一个端部处,固定有一体地包括接地触点等的非驱动侧鼓凸缘152。在感光鼓20的另一个端部处,固定有鼓凸缘151,作为用于接收来自主组件1的旋转力的旋转力接收部件的联接件150附连到所述鼓凸缘。因此,构成感光鼓单元21。
鼓单元21的凸缘151与一体地附连到鼓框架51的支承部158可旋转地接合。此外,压配合到鼓框架51中的鼓轴159可旋转地接合到设在非驱动侧鼓凸缘152中的孔152a中。因此,鼓单元21在其两端由鼓框架51可旋转地支撑,使得感光鼓20可相对于鼓框架51旋转。
在用于挡光并且保护感光鼓20的保护部件101的一端侧轴101aL处,安装有驱策弹簧102。保护部件101的一端侧轴101aL和另一端侧轴101aR安装到大致U形支承部分51d(51dL和51dR)中。因此,完成图像承载部件单元50。
在相对于感光鼓20的轴向的处理盒的两个端侧的以下描述中,联接件150设在图像承载部件单元50中的那一侧被称为驱动侧并且与驱动侧相反的那一侧被称为非驱动侧。
(显影单元)
将参考图4和图5描述显影单元50。图4是用于示出调色剂室45的结构的透视图。图5是用于示出显影单元40的透视图。
如图4中所示,在调色剂室45中,布置有搅拌部件43。搅拌部件43在非驱动侧由调色剂容纳容器40a支撑并且由附连到调色剂容纳容器40a的斜齿轮28(在下文中被称为搅拌齿轮)支撑。搅拌部件43通过搅拌齿轮28的旋转而旋转。
此外,齿轮30和29(图5)可旋转地附连到调色剂容纳容器40a并且彼此接合以进行旋转,使得驱动力经由齿轮29从齿轮30传递到搅拌齿轮28。
调色剂容纳容器40a和盖40b通过超声焊接一体地结合。围绕供应开口37,相对于与调色剂T的进入方向交叉的方向形成开口边缘37a。显影剂密封件28(在下文中被称为调色剂密封件)热固定到开口边缘37a,如图5中所示。
显影刮刀42与用于清洁显影辊41的端表面的、与显影辊41的端表面接触的清洁部件38一起在其端部分处用螺钉59固定到调色剂容纳容器40a。然后,显影辊单元39设在预定位置处。顺便提一句,磁辊41a通过设在显影辊41的驱动侧的开口插入显影辊单元39中,并且显影辊凸缘41b压配合在该开口处。
此外,用于将感光鼓20的表面和显影辊41的表面之间的间隙保持在一定水平的分开部件48(48L、48R)和支承部件47(47L、47R)布置在显影辊41的两个端部处。此外,在驱动侧,显影辊41带有显影辊齿轮49(第二齿轮),所述显影辊齿轮与设在图像承载部件单元50的凸缘151上的鼓齿轮151c(图像齿轮)(图3)接合,用于将旋转力传递到显影辊41。显影辊齿轮49与图5中所示的齿轮30接合。
然后,第一侧部件55L在非驱动侧附连到调色剂容纳容器40a并且第二侧部件55M在驱动侧附连到调色剂容纳容器40a。顺便提一句,第一侧部件55L带有将接触主组件的触点62和63。
与侧部件55的固定一起,由第一侧部件55L和第二侧部件55R实现布置在显影辊单元39的两个端部处的支承部件47(47L、47R)的定位。由这些支承部件47可旋转地支撑显影辊41。因此,显影单元40完成。
(处理盒的框架结构)
将参考图2、图5、图6、图7和图33描述处理盒的框架结构。图6是用于示出盒2的框架结构的透视图。图7的部分(a)和(b)是用于示出图像承载部件单元50和显影单元40之间的连接部分的细节的示意性透视图。特别地,图7的(a)是显示图像承载部件单元50和显影单元40之间的连接之前的状态的透视图。此外,图7的(b)是显示图像承载部件单元50和显影单元40之间的连接之后的状态的透视图(其中图像承载部件单元50被部分地切掉)。图33的部分(a)和(b)是盒2的侧视图。
如图2中所示,感光鼓20、充电辊12和清洁刮刀52附连到鼓框架51以构成图像承载部件单元50。另一方面,显影单元40由调色剂容纳容器40a、盖40b、侧部件55(55L、55R)、显影辊41等构成,如图5中所示。调色剂容纳容器40a和盖40b通过诸如焊接等的手段一体地连接以形成显影装置框架,包含调色剂的调色剂室45和显影室44设在所述显影装置框架中。此外,侧部件55(55L、55R)设在显影单元40的纵向端部部分处(相对于显影辊41的轴向)并且通过诸如螺钉或焊接的手段连接到调色剂容纳容器40a。
然后,如图6中所示,图像承载部件单元50和显影单元40由作为具有圆形横截面形状的销的连接部件54(54L、54R)彼此可旋转地连接。
在该实施例中,作为用于连接部件54的材料,使用SUS303。作为用于图像承载部件单元50和显影单元40的框架的材料,使用高度耐冲击的聚苯乙烯(HIPS)。连接部件54也可以由另一种金属或树脂形成,并且图像承载部件单元50和显影单元40也可以由另一种树脂形成。
在形成于侧部件55L上的第一臂部分55aL的端部处,设有长孔形开口60。在形成于侧部件55R上的第二臂部分55aR的端部处,设有圆孔61。
当连接显影单元40和图像承载部件单元50时,首先,将显影单元40的臂部分55a(55aL、55aR)在预定位置处插入鼓框架51中。在这里,如图7的(a)和(b)中所示,鼓框架51带有连接部件54穿过其中的孔51a(51aL、51R)和孔51b(51bL、51bR)。
在盒的驱动侧,将连接部件54R插入设在显影单元40中的圆孔61中和设在图像承载部件单元50中的孔51aR和51bR中,从而连接显影单元40和图像承载部件单元50。
首先,如图7的(a)中所示,将连接部件54R插入鼓框架51的孔51aR中。连接部件54R和孔51aR建立干涉配合。然后,将连接部件54R插入显影单元40的圆孔61中。
此外,如图7的(b)中所示,鼓框架51带有相对于感光鼓20的轴向在孔51aR的内侧并且与孔51aR同轴的孔51bR。穿过圆孔61的连接部件54然后压配合在孔51bR中。连接部件54R和孔51bR建立干涉配合。
压配合在孔51aR和51bR中的连接部件54R处于这样一种状态,在该状态下连接部件在其端部部分处固定到图像承载部件单元50,使得连接部件54R不相对于孔51aR和51bR旋转并且不与孔51aR和51bR脱开。
连接部件54R通过间隙配合与圆孔61接合。由于该原因,显影单元40以连接部件54R作为轴线(轴)(第二轴线(轴))可旋转地并且可移动地连接到图像承载部件单元50。
在处理盒的非驱动侧,连接部件54L同轴地插入到设在显影单元40中的开口60中和设在图像承载部件单元50中的孔51aL和51bL中,从而连接显影单元40和图像承载部件单元50。
连接部件54L压配合在鼓框架51的孔51aL中。连接部件54L和孔51aL建立干涉配合。连接部件54L然后插入显影单元40的开口60中。
鼓框架51带有相对于感光鼓20的轴向在孔51aL的内侧并且与孔51aL同轴的孔51bL。连接部件54L穿过开口60并且压配合在孔51bL中。孔51bL和连接部件54L也建立干涉配合。压配合在孔51aL和51bL中的连接部件54L处于这样一种状态,在该状态下连接部件54L在其端部部分处固定到图像承载部件单元50,使得连接部件54L不相对于孔51aL和51bL旋转并且不与孔51aL和51bL脱开。
连接部件54L在开口60的边界处接触侧部件55L的内表面的一部分,因此连接图像承载部件单元50和显影单元40。
在图像承载部件单元50和显影单元40由连接部件54连接的状态下,显影单元40由其自身的重量被驱策抵靠图像承载部件单元50。因此,设在显影单元40中的显影辊41压靠在设在图像承载部件单元50中的感光鼓20上。
顺便提一句,在该实施例中,压缩螺旋弹簧46附连在显影单元40的臂部分55a(55aL、55aR)的基部处。压缩弹簧通过其弹性力驱策臂部分55a和鼓框架51,使得显影单元40被驱策抵靠图像承载部件单元50并且因此显影辊41可靠地被驱策抵靠感光鼓20。
分开部件48(48L、48R)(图5)附连在显影辊41的端部部分处,使得显影辊41与感光鼓20保持压力间隙。分开部件48接触感光鼓20,使得显影辊41压靠在感光鼓20上。顺便提一句,在以下描述中,显影辊41施加到感光鼓20上的压力也被称为“DPR”。
此外,与盒的非驱动侧的连接部件54L接合的开口60具有长孔形状,使得开口60的两个端部相对于中心部分弯曲。图33的部分(a)是显示盒2的整个侧表面的示意图并且图33的(b)是开口60的放大图。
在该情况下,连接部件54L可以改变它在长孔形开口60内的接合位置。由于该原因,在非驱动侧(一端侧),显影单元40能够以连接部件54L作为轴线(轴)(第一轴线(轴))相对于图像承载部件单元50旋转并且可滑动地和可移动地连接于图像承载部件单元50。这是由于即使在连接部件54L和54R的位置由于零部件公差而偏离基准尺寸(位置)的情况下,开口60和连接部件54L之间的接合位置变化以允许吸收这种偏差。
顺便提一句,随后将描述开口60的端部部分相对于中心部分弯曲的原因。
另一方面,在盒2的驱动侧,如上所述,连接部件54R与圆孔61而不是长孔形开口接合,从而连接显影单元40和图像承载部件单元50。在驱动侧,显影单元40不能相对于图像承载部件单元50滑动和移动。这是由于提供了鼓齿轮151c和显影辊齿轮49并且因此防止这些齿轮之间的接合量变化。
此外,在盒2的驱动侧,在成像期间(在盒2的驱动期间),相对于鼓齿轮151c和显影辊齿轮49之间的压力角方向产生接合压力。接合压力产生围绕显影单元40中的连接部件54R的旋转运动,因此影响在驱动侧显影辊40施加到感光鼓20上的D压力。由于该原因,在该实施例中,当在感光鼓20的轴向上观察盒2时,连接部件54R接合在其中的圆孔61相对于在压力角方向上延伸的直线设在与感光鼓20的中心所处的一侧相同的一侧。
通过以这样的方式提供圆孔61,由于接合压力在显影单元40中产生的旋转力矩用于增强D压力。也就是说,通过接合压力能够抑制显影辊41与感光鼓20分离(分开)。
顺便提一句,当圆孔61设在以上位置时,在盒2的驱动侧的D压力在一些情况下大于在盒2的非驱动侧的D压力。由于该原因,对于设在显影单元40的纵向端部部分处的压缩螺旋弹簧46,期望使设在非驱动侧的压缩螺旋弹簧46的驱策力大于设在驱动侧的压缩螺旋弹簧的驱策力。在一些情况下,压缩螺旋弹簧46仅仅设在非驱动侧。
(处理盒安装部分的结构)
图26是当打开盒门(主组件盖、可打开门)109暴露主组件1的内部时的主组件1的透视图。未安装盒2。参考图26,将描述给盒2传递旋转力的旋转力传递方法。
如图26中所示,主组件1带有作为用于安装和拆卸盒2的安装机构的导轨130,并且盒将沿着导轨130(130L、130R)安装在主组件1中。在这时,主组件1的驱动轴100和作为提供给盒2的旋转力接收部件的联接件150(图6)与盒2的安装操作相关联地连接。驱动轴100与提供给主组件1的未显示的驱动传递装置(例如齿轮系)和未显示的马达连接。当驱动轴100由马达驱动时,感光鼓20通过联接件150接收来自主组件1的驱动力,因此旋转。
如图27和28中所示,在盒2的图像承载部件单元50的驱动侧端部部分处,设有从鼓框架51朝着外部突出的盒引导件51hR。此外,如图29中所示,在图像承载部件单元50的非驱动侧端部部分处,设有盒引导件51hL。
当将盒2安装到主组件1和从主组件拆卸时,盒引导件51hR和图28中所示的支承部件158的圆柱形部分158c沿着图30的(a)中所示的导轨130R被引导。此外,盒引导件51hL和图29中所示的鼓框架51的圆柱形部分51i沿着图30的(b)中所示的导轨130L被引导。因此,盒2通过在大致垂直于驱动轴100的轴向的方向上移动来安装到主组件1和从主组件拆卸。
接着,参考图31,将描述盒2安装到主组件1中的操作。图31的部分(a)和(b)是沿着图26中所示的表面S1获得的盒2和主组件1的示意图。如图31中所示,盒门109由用户打开。然后,在驱动侧,将盒引导件51hR和圆柱形部分158c沿着导轨130R引导,使得处理盒插入主组件1的安装部分中。在非驱动侧,将盒引导件51hL和圆柱形部分51i沿着导轨130L引导(图31的(a))。当盒2在箭头X5方向插入时,驱动轴100和盒2的联接件150接合,使得盒2安装在压力位置(安装部分)(图31的(b))。在这时,从图30的(a)和(b)中所示的驱策弹簧188R和188L,支承部件158的接收部分148e(图28)和鼓框架51的接收部分51g(图29)接收驱策力并且固定。
此外,如图30的(a)中所示,主组件1的导轨130R包括作为第一主组件侧定位部分的肋130Ra和作为第二主组件侧定位部分的凹陷部分130Rb。当盒2安装在主组件1中时,盒2的凹槽158b和圆柱形部分148c分别与主组件1的肋130Ra和凹陷部分130Rb接合。
此外,如图30的(b)中所示,主组件1的导轨130L包括作为第三主组件侧定位部分的凹陷部分130La。当盒2安装在主组件1中时,盒2的圆柱形部分51i与主组件1的凹陷部分130La接合。
此外,当盒2的联接件150接收来自驱动轴100的驱动力时,鼓框架51在旋转方向上(在图28中的逆时针方向上)旋转。因此,鼓框架51的圆柱形部分的接收表面51f与导轨130R的接收部分130Rc接合。
通过上述结构,进行盒2相对于主组件1的定位。
(比较实施例中的盒和D压力之间的关系)
在盒的端部部分处,显影单元40和图像承载部件单元50可旋转地连接并且因此显影单元40的显影辊41经由分开部件48L和48R朝着感光鼓20被驱策。
在这里,作为实施例1的比较实施例,以未应用本发明的盒202作为例子,将参考图8和图9描述显影辊施加到感光鼓上的压力(D压力)。如图8中所示,通过感光鼓220与设在显影辊241的端部部分处的分开部件48L和48R的接触产生D压力。由于该原因,D压力存在于相对于感光鼓220的轴向的一端侧(非驱动侧)和另一端侧(驱动侧)的每一端侧处。
相对于图像承载部件单元250可旋转地提供显影单元240,使得显影辊241在大致平行状态下接触感光鼓220,因此被稳定地驱策抵靠感光鼓200。D压力的值在非驱动侧和驱动侧之间平衡。
然而,在盒202中使用的部件(零部件)的尺寸公差和盒202的变形影响显影单元240和图像承载部件单元250之间的连接,使得在一些情况下D压力破坏非驱动侧和驱动侧之间的平衡。
在下文中,将以用于连接显影单元240和图像承载部件单元250的连接部件254L的位置由于在盒中使用的零部件的公差等偏离连接部件254R的位置的情况作为例子描述D压力的波动。顺便提一句,连接部件254L设在非驱动侧并且连接部件254R设在驱动侧。此外,在图8的(a)中,Z表示连接感光鼓中心和显影辊中心的方向。
当从感光鼓220的轴向观察连接部件254L和254R时,在连接部件254R的位置(图8的(a))作为基准位置的基础上,考虑连接部件254L的位置在水平方向上偏移的情况(图8的(b)和(c))。
[没有连接部件的位置偏移的情况(未显示)]
在当从感光鼓220的轴向上观察时连接部件254L和254R的位置彼此重叠的情况下,连接部件254L接合在开口260的大致中心部分处。在该情况下,显影辊241在显影辊241的轴线大致平行于感光鼓220的轴线的状态下接触感光鼓220,并且设在显影辊241的端部部分的分开部件248L和248R以大致相同的压力接触感光鼓220。
在该状态下的D压力由图9的图形中的点(a)表示。图9是用于示出比较实施例中的D压力的变化的图形,其中横坐标表示在感光鼓220的轴向上看到的连接部件254L相对于连接部件254R的位置的位置偏移量。也就是说,相对于图8的水平方向,显示了当以连接部件254R的位置作为基准位置时连接部件254L的位置。此外,纵坐标表示D压力的变化量。以当连接部件254L位于基准位置时的D压力作为基准值,并且显示D压力的变化量。在图9中的点(a)处,D压力的变化量在一端侧(非驱动侧“NDS”)和另一端侧(驱动侧“DS”)都为0(零)。
[连接部件位置偏移=x1(在容许范围内)的情况]
接着,将描述连接部件254L的中心朝着一个水平端侧(向左方向)偏离连接部件254R的中心的情况。
在图8的(b)中,连接部件254L的位置朝着一个水平端侧(向左方向)相对于连接部件254R的(基准)位置偏离距离(偏移)x1。
由于出现偏移x1,如图8的(b)中所示,连接部件254L和具有一个端部260d和另一端部260e的开口260之间的接合位置朝着另一端部260e移动。然而,在这时,连接部件254L和开口260的另一端部260e不彼此接触并且保留有间隙。所以,连接部件254L和254R之间的偏移x1可以由连接部件254L和开口260之间的接合位置的变化吸收。由于该原因,显影辊241的端部部分被稳定地驱策抵靠感光鼓220。
也就是说,连接部件254L相对于连接部件254R的位置偏移由开口260吸收,使得显影辊241施加到感光鼓上的压力(D压力)在显影辊241的端部部分处是大致相同的值(图9的部分(b))。
[连接部件位置偏移=x2(在容许范围之外)的情况]
图8的部分(c)显示这样一种状态,其中连接部件254L的位置在水平方向上相对于连接部件254R的位置偏离大于距离x1的距离x2。连接部件254L移动不小于在连接部件254L自身和开口260之间导致的间隙(间距)的距离并且因此与另一端部260e干涉。所以,在另一端部260e接收来自连接部件254L的力的状态下显影单元240的开口260朝着图像承载部件单元250移动。因此,在盒202的设有开口260的非驱动侧(一端侧),显影辊241在使显影辊241接近感光鼓220的方向上接收到力,使得D压力增加。此外,在非驱动侧的D压力和在驱动侧的D压力的总和是恒定的。由于该原因,D压力在驱动侧(另一端侧)与在非驱动侧的D压力的增加对应地减小(图9中的范围(c)。
另一方面,将描述连接部件254L的中心在水平(+)侧(向右方向)相对于连接部件254R的中心偏离距离(偏移)x2的情况。在这时,形成连接部件254L压靠在开口260的一个端部260d上的这种位置关系。在力从连接部件254L施加到一个端部260d的状态下设在显影单元240中的开口260移动离开图像承载部件单元250。也就是说,显影单元240的显影辊241在非驱动侧接收沿着使显影辊241移动离开感光鼓220的方向的力。因此,D压力在非驱动侧减小。此外,对应于在非驱动侧的D压力的减小,D压力在驱动侧(一端侧)增加(图9的范围(d))。
也就是说,当连接部件254L的位置相对于连接部件254R的位置偏离到使连接部件254L接触开口260的一个端部260d的程度时,D压力突然变化。
所以,为了减小D压力的突然变化,即使当连接部件254L的位置偏离连接部件254R的位置时,优选的是,连接部件254L不向开口260的端部施加力。也就是说,优选地可以使用这样一种构造,其中连接部件254L总是产生连接部件254L自身和一个端部260d之间的间隙以及连接部件254L自身和另一端部260e之间的间隙。
在这里,根据本发明人的研究,为了产生连接部件254L和一个端部260d之间的间隙以及连接部件254L和另一端部260e之间的间隙,将开口260相对于水平方向的斜度设置在预定范围内是有效的。参考图10至13,将描述盒202中的开口260的适当斜度。图10的部分(a)和(b)是用于示出比较实施例中的施加到显影单元上的力之间的关系的示意图。图11是显示开口260的角度和施加到显影单元240的力之间的关系的图形。图12是显示施加到显影单元240的力的示意图。图13是显示连接部件的位置偏移和D压力的变化量之间的关系的图形。
为了保持连接部件254L接合在开口260中并且同时产生连接部件254L与开口260的两个端部之间的间隙的状态,当连接部件254L接合到开口260中时需要平衡施加到显影单元240的力。如果施加到显影单元240的力未被平衡,则由于施加到显影单元240的合力,显影单元240沿着开口260形成方向滑动和移动。因此,连接部件254L和开口260之间的接合位置移动,使得连接部件254L接触开口260的一个端部260d或另一端部260e。
将参考图10的(a)和(b)描述当盒202安装在主组件中时用于平衡在非驱动侧(一端侧)作用于显影单元240的力的条件,图10是盒202的示意图(自由体视图)。
力Fi(i=1至7)施加到显影单元240,如图10的(a)和(b)中所示。F1是当显影辊241挤压感光鼓220时作为反作用力由显影辊241接收的反作用力。所以,F1在量(值)上与D压力相等。F2是显影单元240的自身重力。F3是接触鼓框架251并且向下驱策显影单元240的压缩螺旋弹簧246的力。F4是由接触部分262从主组件1接收的接触压力。F5是由接触部分263从主组件1接收的接触压力。F6是由开口260从连接部件254L接收的法向反作用力(反作用力的法向分量)。F7是由开口260从连接部件254L接收的摩擦力。
此外,每个力Fi和连接部件254L之间的距离为Li并且每个Fi和水平表面之间形成的角度为θi。
在该情况下,用于平衡施加到显影单元240的力的条件需要满足以下公式(1)至(4)。
-F1×L1+F2×L2+F3×L3-F4×L4-F5×L5+F7×L7=0(1)
(公式(1):围绕连接部件254L的力矩的平衡)
(公式(2):相对于X方向的力的平衡)
(公式(3):相对于Y方向的力的平衡)
-μF6≤F7≤μF6(4)
(公式(4):摩擦力F7不大于最大静摩擦力的条件)
在公式(4)中,μ表示静摩擦力的系数。
此外,力矩的(+)方向是顺时针方向。水平方向(“H”)是X方向,并且竖直方向(“V”)是Y方向(图10的(a))。
通过同时求解公式(1)至(3)获得平衡施加到显影单元240的力所需的力。然而,力Fi(i=1至7)中的F3至F5、L1至L7和θ1至θ5是设计管控(控制)值。此外,θ6=θ7+90°(度)。当将这些值代入公式(1)至(3)中时,可以以θ7为函数获得作为未显示值的力F1、F6和F7。然而,摩擦力F7的绝对值只能是低于在开口260和连接部件254L之间产生的最大静摩擦力的值。通过使用静摩擦系数μ和法向反作用力F6,在开口260和连接部件254L之间产生的最大静摩擦力作为μF6和-μF6获得。所以,为了实际上平衡施加到显影单元240的力,从公式(1)至(3)获得的力F6和F7需要满足公式(4)。
在这里,在图11中显示的图形中,横坐标表示开口的斜度θ7并且纵坐标表示从公式(1)至(3)获得的法向反作用力F6和摩擦力F7、以及最大静摩擦力μF6和-μF6。
从图11可知,在斜度θ7、θmax和θmin满足以下公式(5)的情况下满足公式(4)。
θmin≤θ7≤θmax(5)
在图11和公式(5)中,θmax表示当满足F7=μF6时的θ7的值,并且θmin表示当满足F1=-μF6时的θ7的值。
当满足公式(5)时,在显影单元240中产生满足公式(1)至(4)的力Fi(i=1至7),使得施加到显影单元400的力被平衡。因此,在连接部件254L不接触开口260的端部260d和260e的状态下,连接部件254L接合在开口260中。
此外,在满足公式(5)的情况下,特别地,当满足θ7=θopt时的D压力最稳定。这是这样一种情况,其中θopt是当满足F7=0时并且即使当摩擦力不作用于开口260和连接部件254L之间时施加到显影单元240的力也被平衡的角度。将更具体地描述角θopt。
如图12中所示,开口260垂直于作为力F1至F5的合力的力Fa形成,从而产生满足以下公式(6)的法向反作用力F6。
当满足公式(6)时的开口260的斜度提供角度θopt。当开口260的角度为θopt时,即使当摩擦力F7施加到开口260和连接部件254L之间时施加到显影单元240的力也被平衡。也就是说,连接部件254L和开口260之间的接合不产生用于将连接部件254L移动到开口260的一个端部260d或另一端部260e的力,使得可以进一步稳定D压力。
在这里,在作为侧视图的图32的(a)中显示当开口260的角度为θopt时的显影单元240的一部分。图32的部分(b)是图32的(a)中所示的开口260的放大图。在该比较实施例中,开口260的纵向宽度为4.3mm并且接合在开口260中的连接部件254L的横截面的直径为3mm。
比较实施例中的D压力的波动由图13中的粗线(a)指示。在图13中,横坐标表示从感光鼓220的轴向上看在从感光鼓220的中心朝着显影辊241的中心的方向上连接部件254L的位置相对于连接部件254R的位置的偏移量(mm)。也就是说,相对于从感光鼓220的中心朝着显影辊241的中心的方向,横坐标表示当连接部件254R的位置是基准位置时的连接部件254L的位置。此外,在图13的图形中,纵坐标表示D压力的变化量(gf)。当连接部件254L的位置位于基准位置时的D压力为零,显示了相对于零的变化量(gf)。顺便提一句,在图13中,仅仅显示在盒的非驱动侧(一端侧)的D压力。
根据图13中的粗线(a),在从-0.3到+0.4的横坐标的值的范围内,D压力的变化小。当连接部件254L相对于连接部件254R的位置的位置偏移在以上范围内时,连接部件254L不向开口260的端部施加力并且因此应当理解D压力不波动。
(比较实施例中的问题)
例如当用户将盒202安装到主组件中时,在一些情况下力意外地施加到显影单元240。当力在外部施加到显影单元240时,在一些情况下开口260相对于连接部件254L移动。在这些情况下,在非驱动侧(一端侧),显影单元240相对于图像承载部件单元250移动。在非驱动侧,当显影单元240接近图像承载部件单元250时,显影辊241强力地压靠在感光鼓220上,使得D压力变大。另一方面,在非驱动侧,当显影单元240移动离开图像承载部件单元250时,用于使显影辊241移动离开感光鼓220的力被施加,使得D压力变小。
根据在开口260和连接部件254L之间产生的摩擦力,显影单元240不返回到初始位置,而是保持在D压力大幅波动的状态。
下面将参考图13和14描述在显影单元240在非驱动侧由外力移动的情况下的D压力的波动。图14的部分(a)、(b)和(c)是用于示出比较实施例中的开口260和连接部件254L之间的接合位置的示意图。
作为例子显示这样一种状态,其中由于处理盒的公差,连接部件254L在从感光鼓220的中心朝着显影辊的中心的方向上相对于连接部件254R偏离-0.2mm(即,图13的横坐标上的-0.2的点)。在该状态下,当盒202处于正常状态时,连接部件254L和开口260接合在图14的(b)中所示的状态下。
接着,在图14的(a)中显示这样一种状态,其中显影单元240在非驱动侧移动达到连接部件254L接触开口260的另一端部260e的程度。在该状态下,在盒202安装在主组件中的情况下,设在显影单元240的非驱动侧的侧部件255L移动离开图像承载部件单元250。所以,由侧部件255L支撑的显影辊241在非驱动侧接收在使显影辊241与感光鼓220分开的方向上的力,使得D压力减小。在该状态下的D压力由图13中的虚线(b)指示。在非驱动侧(一端侧),D压力从盒202的正常状态下的D压力减小变化量Hd。
接着,假设这样一种情况,其中盒202在这样一种状态(图14的(c))下安装在主组件中,在所述状态下力施加到显影单元240以移动显影单元240达到连接部件254L接触开口260的一个端部260d的程度。在该状态下,设在显影单元240的非驱动侧的侧部件255L在使侧部件255L接近图像承载部件单元250的方向上移动。在非驱动侧,由侧部件255L支撑的显影辊241接收在使显影辊241接近感光鼓220的方向上的力,使得D压力增加。在该状态下的D压力由图13中的细线(c)指示。在非驱动侧(一端侧),D压力从盒202的正常状态下的D压力增加变化量Hu。
也就是说,在比较实施例中的盒202中,在外部施加力并且因此显影单元240移动的情况下,D压力波动H1=Hd+Hu。
此外,在连接部件254L和长形孔(开口)260之间的接合位置移动的情况下,为了使接合位置返回初始位置,需要采取对策使得例如通过在处理盒的制造期间将润滑脂施加到开口260的边界减小施加到连接部件254L和开口260之间的摩擦力。然而,该对策构成盒制造步骤的复杂化的因素。
(实施例1中的开口的构造)
在实施例1中的盒2中,即使在力从外部施加到显影单元40并且因此连接部件54L和开口60之间的接合位置移动至开口60的端部的情况下,以产生用于使接合位置返回初始位置的力的方式确定开口60的形状。
将参考图15至图17和图33描述实施例1中的开口60的作用。
如图33的(b)中所示,在该实施例中,相对于开口60的纵向,即,连接部件54L和开口60之间的接合位置能够移动的方向,开口60的两个端部相对于中心部分倾斜。在该情况下,在开口60的中心部分形成的接触连接部件54L的表面是第一接触部分60a。此外,邻近第一接触部分60a并且相对于第一接触部分60a倾斜的表面是第二接触部分60b和60c。
为了说明开口60和连接部件54L的接合状态,图17是用于示出开口60的形状的示意图。在该实施例中,如图17中所示,连接部件54L在与第一接触部分60a接触的状态下能够在开口60中移动的范围W为0.5mm。类似地,在连接部件54L接触第二接触部分60b和60c的状态下,连接部件54L能够在开口60中移动的范围Wb和Wc类似地为0.5mm。连接部件54L的横截面的直径与比较实施例中类似地为3mm。
在这里,第一接触部分60a是平坦表面,其被确定成以满足上述的公式(5)的方式提供在平坦表面和水平表面之间形成的角度θ7a。特别地,在该实施例中,满足θ7a=θopt。如上所述,在盒2安装在主组件1中的情况下,当连接部件54L以满足:θmin<θ7a<θmax的角度θ7a接触第一接触部分60a时,平衡了施加到显影单元40上的力。也就是说,未产生用于移动连接部件54L和开口60之间的接合位置的力。所以,当连接部件54L接触第一接触部分60a时,显影单元40以连接部件54L作为旋转轴(轴线)相对于图像承载部件单元50可旋转地移动。
另一方面,第二接触部分60b和60c是分别以角度θ7b和θ7c形成的平坦表面,所述角度形成为在公式(5)的范围之外。也就是说,满足θ7b>θmax和θ7c<θmin。当连接部件54L接触第二接触部分60b或60c时,由于施加到显影单元40的力的合力,开口60相对于连接部件54L移动。
更具体地,当力从外部施加到显影单元40并且因此显影单元40在非驱动侧移动远离图像承载部件单元50时,如图15的(a)中所示,连接部件54L接触设在开口60的另一端部60e侧的第二接触部分60b。在这时,作为力F1至F5的总和的力Fa和由第二接触部分60b从连接部件54L接收的法向反作用力F6b施加到显影单元40。通过施加力Fa和F6b,在平行于第二接触部分60b的表面的方向上产生力Fb。
在这时,第二接触部分60b布置成使得法向反作用力F6b的方向相对于当第一接触部分60a接触连接部件54L时由第一接触部分60a接收的法向反作用力F6a倾斜,从而与第一接触部分60a分开。此外,第二接触部分60b布置成使得在第二接触部分60b和水平表面之间形成的角度θ7b不包括在公式(5)的范围内并且满足:θ7b>θmax。由这种设置产生的力Fb的方向使得显影单元40在非驱动侧的侧部件55L移动,使得开口60的另一端部60e移动离开连接部件54L。
由第二接触部分60b形成的角度θ7b设置成使得施加到显影单元40的力Fb的值超过由第二接触部分60b从连接部件54L接收到的最大静摩擦力。如图15的(b)中所示,显影单元40在非驱动侧的侧部件55L在产生力Fb的方向上移动,直到连接部件54L接触第一接触部分60a。也就是说,即使当力在外部施加并且显影单元40在非驱动侧移动远离图像承载部件单元50时,开口60相对于连接部件54L移动,使得显影单元40的位置返回初始位置。在连接部件54L接触第一接触部分60a的状态下,第一接触部分60a接收来自连接部件54L的法向反作用力F6a,使得平衡了施加到显影单元40的力。也就是说,显影单元40相对于图像承载部件单元50的运动被抑制。
类似地,如图16的(a)和(b)中所示,在开口60的一个端部60d侧,设有相对于第一接触部分60a倾斜的第二接触部分60c。
当力从外部施加到显影单元40并且因此显影单元40在非驱动侧朝着图像承载部件单元50移动时,如图16的(a)中所示,连接部件54L接触开口60的第二接触部分60c。在这时,力Fa和法向反作用力F6b施加到显影单元40,使得角度θ7c被设置成产生用于移动显影单元40的力Fc。也就是说,第二接触部分60c布置成使得由第二接触部分60c从连接部件54L接收的法向反作用力F6c的方向相对于由第一接触部分60a从连接部件54L接收的法向反作用力F6a倾斜,从而与第一接触部分60a分开。此外,第二接触部分60c布置成使得在第二接触部分60c和水平表面之间形成的角度θ7c满足:θ7c<θmin并且不包括在公式(5)的范围内。在这种设置下产生的力Fc的值超过由第二接触部分60c从连接部件54L接收的最大静摩擦力。当第二接触部分60c接触连接部件54L时,如图16的(b)中所示,显影单元40在非驱动侧的侧部件55L在力Fb的方向上移动,直到连接部件54L接触第一接触部分60a。也就是说,即使当显影单元40由于外部施加的力在非驱动侧朝着图像承载部件单元50移动时,开口60相对于连接部件54L移动使得被移动的显影单元40的位置返回初始位置。
将参考图18描述由实施例1中的盒2获得的效果。
图18是显示实施例1中的D压力的波动的图形。在图形中,横坐标表示连接部件54L和54R之间的位置偏移量。也就是说,当从感光鼓20的轴向观察连接部件54L和54R时,显示了相对于从感光鼓20的中心朝着显影辊41的中心的方向当连接部件54R的位置是基准位置时连接部件54L的位置。图形中的纵坐标表示D压力相对于基准值的变化量。
与比较实施例中类似地,在连接部件54L的位置在使显影辊41接近感光鼓20的方向上相对于连接部件54R偏离0.2mm的点(图18的图形中的横坐标上的-0.2的位置)观察D压力的波动。
在连接部件54L和开口60之间的接合位置由于外力施加到显影单元40而朝着开口60的另一端部60e侧移动并且因此显影单元40在非驱动侧移动离开图像承载部件单元50的情况下,显影辊41的D压力在非驱动侧减小。顺便提一句,对应于在非驱动侧的减小,在驱动侧的D压力增加。在该情况下,在非驱动侧的D压力由图18中的虚线(b)指示。
另一方面,当连接部件54L和开口60之间的接合位置由于外力施加到显影单元40而朝着开口60的一个端部60d侧移动并且因此显影单元40在非驱动侧朝着图像承载部件单元50移动时,显影辊41的D压力在非驱动侧增加。顺便提一句,对应于在非驱动侧的增加,在驱动侧的D压力减小。在该情况下,在非驱动侧的D压力由图18中的实(粗)线(c)指示。
如图18中所示,由显影单元40在非驱动侧的运动产生的D压力的变化量为H2,其小于比较实施例中的变化量H1(图13)。因此,应当理解,在实施例1中D压力的波动被抑制。
这是由于即使在显影单元40在非驱动侧由外部施加的力移动并且因此连接部件54L和开口60之间的接合位置移动的情况下,也在使移动的接合位置返回初始位置的方向上产生用于移动显影单元40的力。也就是说,即使当显影单元40移动并且因此连接部件54L和开口60之间的接合位置移位到开口60的一个端部50d侧或另一端部60e侧时,用于使移动的接合位置返回到初始位置的力也起作用。由于该原因,显影单元40不会相对于图像承载部件单元50大幅移动,使得D压力波动可以被抑制。
实际上,从图13和图18的图形之间的比较可以理解,在作为连接部件54L相对于连接部件54R的位置偏移范围的从-0.2mm到0.4mm的范围内,实施例1中的D压力波动的程度小于比较实施例。
根据实施例1,D压力在两个纵向端部部分处得以稳定。由于该原因,在显影辊41的端部部分,分开部件48R和48L稳定地接触感光鼓20,使得能够将显影辊41表面和感光鼓20表面之间的间隙保持在恒定水平。
能够抑制由于D压力的减小引起的显影辊41与感光鼓20的分开以及由于D压力的增加引起的分开部件48的磨耗(磨损)和施加到盒2的负荷。
此外,在该实施例中,在显影单元40由于外部施加的力而移动并且因此开口60和连接部件54L之间的接合位置移动的情况下,不需要主组件1的驱动力作为用于使移动的接合位置返回初始位置的力。由于该原因,没有为了稳定D压力而施加到马达上的负荷。所以,能够抑制成像装置的致动期间扭矩的增加。
此外,为了使连接部件54L和开口60之间的接合位置返回初始位置,不需要采取将润滑脂施加到开口60中的对策。由于该原因,盒制造步骤被简化以便于制造的自动化。
此外,即使当连接部件54L的位置偏离连接部件54R的位置时,连接部件54L也保持在连接部件54R与开口60的两个端部分开的状态。所以,能够抑制由于由连接部件54L将力施加到开口60的一个端部60d或另一端部60e导致的D压力的突然波动。
此外,为了进一步平滑地移动连接部件54L和开口60之间的接合位置,每个接触部分的连接部分也可以形成为曲面状形状。
顺便提一句,第一接触部分60a和第二接触部分60b和60c不必彼此连接,而是可以仅仅需要连接部件54L和开口60之间的接合位置可从第二接触部分60b或60c移动到第一接触部分60a。例如,相对于感光鼓20的轴向,第一接触部分60a的位置和第二接触部分60b(60c)的位置也可以彼此分开。
[实施例2]
将参考图34、图19和图20描述实施例2。
图34的部分(a)是显示该实施例中的显影单元40的一部分的侧视图。图34的部分(b)是设在图34的(a)中所示的显影单元40中的开口60的放大图。在该实施例中,如图34的(b)中所示,开口60的特征在于具有在接触连接部件54L的位置处的曲面形状。
为了说明开口60和连接部件54L之间的接合状态,在图19中示意性地显示该实施例中的开口60的形状。
与实施例1中类似地,当接触连接部件54L时,其中平衡了施加到显影单元40的力的区域是第一接触部分。当连接部件54L接触第一接触部分时,显影单元40以连接部件54L作为旋转轴线(轴)(第一轴线(轴))相对于图像承载部件单元50能够旋转地移动。另一方面,当接触连接部件54L时,其中显影单元40移动直到连接部件54L接触第一接触部分的区域是第二接触部分。
如图19中所示,其中在接触连接部件54L的接触部分的切线和水平表面之间形成的角度θ7满足公式(5)的区域(其中满足θmin≤θ7≤θmax的区域)是第一接触部分。此外,其中角度θ7不满足公式(5)的区域(其中满足θ7<θmin或θ7>θmax的区域)是第二接触部分。
在该实施例中,当从感光鼓20的轴向观察开口60时,开口60设成具有弓形部分,在该弓形部分处切线提供角度θ7a(=θopt)、θ7b(>θmax)和θ7c(<θmin)。开口60的长度(宽度)W为大约4.5mm。
将参考图20描述实施例2中的D压力波动。图20是显示该实施例中的D压力波动的图形。在图20中,虚线(b)显示当开口60和连接部件54L之间的接合位置由于将外力施加到显影单元40朝着开口60的另一端部60e侧移位时的D压力。此外,图20中的实(粗)线显示当开口60和连接部件54L之间的接合位置由于将外力施加到显影单元40朝着开口60的一个端部60d侧移位时的D压力。
同样在该实施例中,在连接部件54L和开口60之间的接合位置朝着开口60的另一个端部60e侧移位并且因此显影单元40在非驱动侧移动离开图像承载部件单元50的情况下,显影辊41的D压力在非驱动侧减小(图20中的虚线(b))。
另一方面,在接合位置朝着一个端部60d侧移位并且因此显影单元40在非驱动侧接近图像承载部件单元50的情况下,D压力在非驱动侧增加(图20的实线(c))。
然而,当比较图13和图20中的D压力时,应当理解,该实施例中的D压力的变化量H3小于比较实施例中的D压力的变化量H1。也就是说,同样在该实施例中,连接部件54L和开口60之间的接合位置向着一个端部60d侧或另一个端部60e侧的移动被抑制,使得D压力波动被抑制。
此外,当比较作为实施例1中的D压力的图形的图18和作为本实施例中的D压力的图形的图20时,应当理解,本实施例中的沿着横坐标方向的D压力波动的程度小于实施例1。这可能归因于基于开口60的接触部分的曲面,即使在连接部件54L的位置在很大程度上偏离连接部件54R的位置的情况下,开口60相对于连接部件54L平滑移动到D压力稳定的位置。
[实施例3]
在实施例1和2中,相对于使开口60和连接部件54L之间的接合位置移动的方向,第二接触部分60b和60c设在第一接触部分60a的两侧。然而,第二接触部分不必需要设在第一接触部分60a的两侧。根据用户的操作等,通过将第二接触部分仅仅设在连接部件54L和开口60之间的接合位置被移动的可能性高的位置也获得本发明的效果。在图21中,作为例子,作为示意图显示仅仅在开口60的一个端部60d侧带有第二接触部分60c的开口60。在该情况下,当用户将盒2安装到主组件1中时,显影单元40压靠图像承载部件单元50。因此,在连接部件54L和开口60之间的接合位置朝着开口60的一个端部60d侧移动的情况下,获得使移动的接合位置返回初始位置的效果。也就是说,当用户将盒2安装到主组件1中时,能够抑制非驱动侧的D压力的增加。
另一方面,在第二接触部分设在开口60的另一端部60e侧的情况下,能够抑制由连接部件54L和开口60之间的接合位置朝着开口60的另一端部60e侧移动导致的D压力的减小。
顺便提一句,在实施例1至3中,开口60具有长孔形状,但是本发明不限于此。开口可以仅仅需要提供第一接触部分和第二接触部分并且也可以具有其它形状使得可以通过切掉臂部分55aL的一部分提供挖切部分。
此外,在实施例1至3中,提供给图像承载部件单元50的连接部件54L与开口60接合。然而,如图22中所示,代替连接部件54L,与图像承载部件单元50一体形成的突起50a也可以作为轴(轴线)(第一轴(轴线))与开口60接合。在该情况下,显影单元以突起50a作为旋转轴由图像承载部件单元可旋转地(可移动地)支撑。
[实施例4]
参考图23的(a)和(b),将描述其中开口60设在图像承载部件单元中的实施例。图23的部分(a)是用于示出该实施例中的盒的透视图。图23的部分(b)是由图23的(a)中的封闭虚线指示的区域A的放大图。也就是说,图23的(b)是设在盒中的开口的放大图。
在实施例1至3中,开口60设在显影单元40中并且与开口60接合的轴(第一轴)设在图像承载部件单元50中。然而,如图23的(a)中所示,开口60也可以设在图像承载部件单元50侧。如图23的(b)中所示,在该实施例中,设在显影单元40侧的突起40c作为第一轴与设在图像承载部件单元50中的开口60接合。顺便提一句,在该实施例中,不同于实施例1至3,突起40c相对于开口60可移动地构造。此外,在该实施例中,与开口60设在显影单元40中的情况相比,该实施例中的开口60的弯曲方向与实施例1至3中的相反。
在该实施例中,当突起40c接触开口60的第二接触部分60b或60c时,突起40c通过接收来自第二接触部分60b或60c的法向反作用力移动,使得突起40c接触第一接触部分60a。也就是说,即使当显影单元40接收来自外部的力时,也保持突起40c接触开口60的第一接触部分60a的状态,使得D压力波动被抑制。
也就是说,为了抑制D压力波动,轴(第一轴)提供给图像承载部件单元和显影单元中的任意一个并且与轴接合的开口可以提供给另一个单元。
顺便提一句,对于图23的(b)中所示的开口60,与实施例1中类似地,第一接触部分和第二接触部分的每一个形成平面形状,但是也可以形成曲面形状。
[实施例5]
在实施例1至4中,本发明通过以非接触显影型盒作为例子进行描述,但是也可以通过使用接触显影型盒2实现,如图25中所示。图24的部分(a)和(b)是显示接触显影型盒2中的感光鼓20和显影辊41之间的接触状态的示意图。在使用接触显影型作为显影类型的盒的情况下,如图24的(a)中所示,显影辊41直接接触感光鼓20,从而通过用橡胶材料等制成的弹性部件71涂覆金属芯构成显影辊41。在这里,如图24的(b)中所示,当鼓20接触显影辊41的弹性部件71时,为了管控鼓20进入弹性部件71中的压印(进入)深度(量)d,使用压印深度管控部件70L和70R。压印深度管控部件70L和70R是在显影辊41的两个纵向端部分的每一个处设在金属芯上的圆筒形部件并且在成像期间接触鼓20。在这时,从压印深度管控部件70L和70R的每一个施加的力是D压力。
同样在接触显影型的盒2中,开口60带有第一接触部分和第二接触部分,使得能够稳定显影辊41施加到感光鼓20上的压力。
[工业实用性]
根据本发明,能够提供一种处理盒和一种成像装置,其能够抑制显影剂承载部件施加到图像承载部件的压力的波动。
尽管已参考本文中所公开的结构描述了本发明,但是它不限于所述的细节并且本申请旨在涵盖可以属于改进的目的或以下权利要求的范围内的这样的修改或变化。
Claims (11)
1.一种能够能拆卸地安装到成像装置的主组件的处理盒,包括:
图像承载部件单元,所述图像承载部件单元包括可旋转地设置的图像承载部件;
显影单元,所述显影单元包括要被朝向所述图像承载部件推压的显影剂承载部件,并且通过连接部分能旋转运动地连接到所述图像承载部件单元;
其特征在于,所述连接部分包括:轴,所述轴相对于所述图像承载部件的轴向在所述处理盒的端部侧设在所述图像承载部件单元和所述显影单元中的一个中;以及开口,所述开口在所述端部侧设在所述图像承载部件单元和所述显影单元中的另一个单元中并且与所述轴接触,
其中所述开口包括第一接触部分,所述第一接触部分与所述轴接触以使所述显影单元能够相对于所述图像承载部件单元旋转运动,并且所述开口包括第二接触部分,所述轴相对于所述第二接触部分能够滑动地运动,所述第二接触部分在相对于由所述第一接触部分从所述轴接收的法向反作用力A的方向倾斜的方向上从所述轴接收法向反作用力B,并且当在所述处理盒安装到所述主组件并且不接收来自所述主组件的驱动力的状态下所述第二接触部分接触所述轴时,所述第二接触部分使所述显影单元相对于所述图像承载部件单元移动到所述轴和所述第一接触部分接触的接触位置;以及
其中所述法向反作用力B或该法向反作用力的反作用力是用于使所述轴相对于第一接触部分朝着所述第一接触部分移动的力的分量。
2.根据权利要求1所述的处理盒,还包括:
第一齿轮,所述第一齿轮相对于所述轴向在所述处理盒的另一端部侧设置于所述图像承载部件;
第二齿轮,所述第二齿轮在另一端侧设置于所述图像承载部件以用于与所述第一齿轮接合以接收驱动力。
3.根据权利要求1所述的处理盒,其中所述第二接触部分相对于所述轴沿着所述第一接触部分相对移动所沿的方向布置在所述第一接触部分的两端中的每一端处。
4.根据权利要求3所述的处理盒,其中布置在所述第一接触部分的两端处的两个第二接触部分构造成使得由所述两个第二接触部分中的一个从所述轴接收到的法向反作用力B和由所述两个第二接触部分中的另一个从所述轴接收到的法向反作用力B沿相互分开的方向指向。
5.根据权利要求1所述的处理盒,其中所述第二接触部分相对于所述轴沿着所述第一接触部分相对移动所沿的方向仅布置在所述第一接触部分的一端侧中。
6.根据权利要求1所述的处理盒,其中所述第一接触部分和第二接触部分构造成使得所述法向反作用力A和所述法向反作用力B沿相互分开的方向指向。
7.根据权利要求1所述的处理盒,其中所述第一接触部分与所述第二接触部分之间的连接部分是曲面。
8.根据权利要求1所述的处理盒,其中所述第一接触部分和所述第二接触部分是曲面。
9.根据权利要求1所述的处理盒,其中与所述轴接触的所述第二接触部分安装在所述成像装置的主组件中,并且在所述第二接触部分未将驱动力从所述主组件接收到所述图像承载部件和显影剂承载部件的状态下,所述第二接触部分使所述显影单元相对于所述图像承载部件单元移动到所述轴和所述第一接触部分接触的接触位置。
10.根据权利要求1所述的处理盒,还包括驱策部件,用于驱策所述显影剂承载部件抵靠所述图像承载部件。
11.一种用于在记录材料上形成图像的成像装置,其特征在于,所述成像装置包括:
根据权利要求1-10中任一项所述处理盒;以及
用于在用于实施图像形成的位置处能拆卸地支撑所述处理盒的支撑装置,
其中所述支撑装置以在与所述轴接触的第二接触部分处产生用于将所述显影单元移动到所述轴和第一接触部分接触的接触位置的姿态支撑所述处理盒。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010198777 | 2010-09-06 | ||
| JP2010-198777 | 2010-09-06 | ||
| JP2011171109A JP5094998B2 (ja) | 2010-09-06 | 2011-08-04 | プロセスカートリッジおよび画像形成装置 |
| JP2011-171109 | 2011-08-04 | ||
| PCT/JP2011/070677 WO2012033216A1 (en) | 2010-09-06 | 2011-09-06 | Process cartridge and image forming apparatus |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN103080851A CN103080851A (zh) | 2013-05-01 |
| CN103080851B true CN103080851B (zh) | 2014-06-18 |
Family
ID=45770829
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201180042212.0A Active CN103080851B (zh) | 2010-09-06 | 2011-09-06 | 处理盒和成像装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8583005B2 (zh) |
| JP (1) | JP5094998B2 (zh) |
| CN (1) | CN103080851B (zh) |
| WO (1) | WO2012033216A1 (zh) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6164935B2 (ja) * | 2013-05-27 | 2017-07-19 | キヤノン株式会社 | プロセスカートリッジ |
| JP6168290B2 (ja) * | 2013-06-26 | 2017-07-26 | 株式会社リコー | 現像装置、プロセスユニット及び画像形成装置 |
| BR122018074174B1 (pt) * | 2014-11-28 | 2023-12-19 | Canon Kabushiki Kaisha | Cartucho montável a um conjunto principal de aparelho de um aparelho formador de imagem |
| JP6611571B2 (ja) * | 2014-11-28 | 2019-11-27 | キヤノン株式会社 | カートリッジ、カートリッジを構成する部材、および画像形成装置 |
| JP6337792B2 (ja) | 2015-02-06 | 2018-06-06 | ブラザー工業株式会社 | 現像カートリッジ |
| JP6667249B2 (ja) * | 2015-10-14 | 2020-03-18 | キヤノン株式会社 | カートリッジ |
| JP2017151358A (ja) * | 2016-02-26 | 2017-08-31 | 富士ゼロックス株式会社 | 画像形成組立体および画像形成装置 |
| JP6736316B2 (ja) * | 2016-03-08 | 2020-08-05 | キヤノン株式会社 | プロセスカートリッジ及び画像形成装置 |
| JP2017161722A (ja) | 2016-03-09 | 2017-09-14 | ブラザー工業株式会社 | 現像カートリッジ |
| JP7483541B2 (ja) | 2019-09-17 | 2024-05-15 | キヤノン株式会社 | カートリッジ及び画像形成装置 |
| EP3796100B1 (en) * | 2019-09-17 | 2023-05-03 | Canon Kabushiki Kaisha | Cartridge and image forming apparatus |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1050783A2 (en) * | 1999-04-30 | 2000-11-08 | Canon Kabushiki Kaisha | Developing device, process cartridge and energy electric supply part |
| CN1510527A (zh) * | 2002-12-20 | 2004-07-07 | ������������ʽ���� | 用于密封磁性微粒的密封件以及使用这种密封件的显影设备 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS56155952A (en) | 1980-05-02 | 1981-12-02 | Minolta Camera Co Ltd | Electronic copier |
| JPH08339149A (ja) | 1995-06-13 | 1996-12-24 | Canon Inc | プロセスカートリッジ及び電子写真画像形成装置 |
| JPH0950224A (ja) * | 1995-08-04 | 1997-02-18 | Canon Inc | プロセスカートリッジ及び電子写真画像形成装置 |
| JP4053194B2 (ja) | 1999-08-26 | 2008-02-27 | 株式会社リコー | プロセスカートリッジ |
| JP2001228686A (ja) | 2000-02-16 | 2001-08-24 | Canon Inc | 現像装置とその組立方法及びプロセスカートリッジ |
| JP2004144803A (ja) | 2002-10-22 | 2004-05-20 | Canon Inc | 現像装置及びプロセスカートリッジ |
-
2011
- 2011-08-04 JP JP2011171109A patent/JP5094998B2/ja active Active
- 2011-09-02 US US13/224,793 patent/US8583005B2/en active Active
- 2011-09-06 CN CN201180042212.0A patent/CN103080851B/zh active Active
- 2011-09-06 WO PCT/JP2011/070677 patent/WO2012033216A1/en active Application Filing
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1050783A2 (en) * | 1999-04-30 | 2000-11-08 | Canon Kabushiki Kaisha | Developing device, process cartridge and energy electric supply part |
| CN1510527A (zh) * | 2002-12-20 | 2004-07-07 | ������������ʽ���� | 用于密封磁性微粒的密封件以及使用这种密封件的显影设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012078793A (ja) | 2012-04-19 |
| US20120057899A1 (en) | 2012-03-08 |
| CN103080851A (zh) | 2013-05-01 |
| JP5094998B2 (ja) | 2012-12-12 |
| US8583005B2 (en) | 2013-11-12 |
| WO2012033216A1 (en) | 2012-03-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103080851B (zh) | 处理盒和成像装置 | |
| RU2690046C1 (ru) | Технологический картридж и электрофотографическое устройство формирования изображения | |
| CN100390681C (zh) | 可拆卸地装在电摄影成像设备上的装置和电摄影成像设备 | |
| US6215969B1 (en) | Toner container, toner container assembling method, process cartridge, and electrophotographic image forming apparatus | |
| CN102057333B (zh) | 盒以及使用该盒的电子照相成像设备 | |
| CN100535785C (zh) | 辊子间隔装置以及具有该辊子间隔装置的成像设备 | |
| US6011941A (en) | Process cartridge and electrophotographic image forming apparatus | |
| CN102109797B (zh) | 显影盒 | |
| CN102914958B (zh) | 处理盒以及电子照相成像设备 | |
| CN104583879A (zh) | 成像装置和处理盒 | |
| US6226476B1 (en) | Developing device holder having antenna contact mounting unit | |
| US6115565A (en) | Sealing member, cleaning apparatus, process cartridge and electrophotographic image forming apparatus | |
| CN100432849C (zh) | 处理盒和成像设备 | |
| CN103324072A (zh) | 处理盒、显影设备和成像装置 | |
| CN104334469A (zh) | 包装构件和包装在包装构件中的盒 | |
| CN101487996A (zh) | 充电设备、处理卡盒、图像形成设备 | |
| JP5762375B2 (ja) | プロセスカートリッジおよび画像形成装置 | |
| EP2357538B1 (en) | Developer and image forming apparatus including the same | |
| CN103558743A (zh) | 图像形成装置 | |
| CN105824213A (zh) | 驱动组件及显影盒 | |
| US20150185688A1 (en) | Image forming apparatus and main assembly of the image forming apparatus | |
| CN102736483A (zh) | 图像形成装置和调色剂容器 | |
| CN104950624A (zh) | 感光体盒 | |
| CN106933078A (zh) | 显影盒 | |
| JP2000347551A (ja) | プロセスカートリッジ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant |