CN101314362B - 马达控制器和电动助力转向装置 - Google Patents
马达控制器和电动助力转向装置 Download PDFInfo
- Publication number
- CN101314362B CN101314362B CN2008100983835A CN200810098383A CN101314362B CN 101314362 B CN101314362 B CN 101314362B CN 2008100983835 A CN2008100983835 A CN 2008100983835A CN 200810098383 A CN200810098383 A CN 200810098383A CN 101314362 B CN101314362 B CN 101314362B
- Authority
- CN
- China
- Prior art keywords
- theta
- max
- sin
- cos
- current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
- B62D5/0487—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures detecting motor faults
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
- B62D5/0484—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures for reaction to failures, e.g. limp home
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/22—Current control, e.g. using a current control loop
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/02—Providing protection against overload without automatic interruption of supply
- H02P29/032—Preventing damage to the motor, e.g. setting individual current limits for different drive conditions
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Abstract
本申请涉及一种马达控制器和一种电动助力转向装置。当在任何一相中发生电流流动故障时,微型计算机17计算沿以预定转角θA、θB为渐近线的正切曲线而变化的d轴电流命令值Id*。微型计算机17通过依据d轴电流命令值Id*进行电流反馈控制来持续地输出使用除发生电流故障的相之外的两相作为电流流动相的马达控制信号。在这种两相驱动操作中,微型计算机17以这样的方式计算d轴电流命令值Id*和q轴电流命令值Iq*,使得电流流动相的相电流值在需要依据最大值对相电流进行限制的转角限制范围或者电流限制范围(θ1<θ<θ2,θ3<θ<θ4)中固定于为各相设定的能够流动的电流的各个最大值。
Description
技术领域
本发明涉及一种马达控制器和一种电动助力转向装置。
背景技术
在许多情况下,例如在电动助力转向装置(EPS)中使用的传统马达控制器包括异常检测装置。当由于供电线路断开或驱动电路的接触损坏而造成在U、V和W相的任何一相中发生电流流动故障时,异常检测装置便检测到异常。当检测到这种异常时,迅速停止马达的操作控制,从而进行故障保护。
但是,在EPS中,如果暂停马达的操作控制,则将非常大地改变转向特性。具体地,驾驶员需要增加转向力以精确地操纵转向盘。在这方面,例如,日本公开专利公报第2003-26020号公开了一种马达控制器,即使在某一相中检测到电流流动故障,该马达控制器仍通过使用没有电流流动故障的两相作为电流流动相而持续地控制马达的操作。通过这种方式,辅助力持续地施加到转向系统,因而防止了由于故障保护而增加驾驶员的负荷。
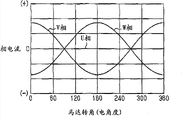
但是,参照图15,如果在上述传统情况中将正弦电流供应给电流流动相中的各相,则会引起转矩脉动,从而使转向舒适度下降。图15示出了其中U相中电流流动已经发生故障而在V相和W相中正常电流流动得到保证的示例。
具体地,如图16所示,如果将传统的两相驱动操作中的马达电流的变化表示在d/q坐标系统中,则为马达转矩的目标控制值的q轴电流命令值保持固定不变。但是,实际的q轴电流值则根据正弦波变化。换句话说,所产生的马达电流并不符合所要求的转矩。因此,马达在没有实现其满输出性能的情况下持续运转。
此外,如在日本公开专利公报第2006-67731号中所公开的,通过对d/q坐标系统的电流偏差(主要是q轴电流偏差)与预定阈值进行比较,来检测控制系统的异常,所述异常例如由于驱动电路故障或者传感器的问题而引起的过电流的产生。但是,在上述的两相驱动操作中,d-q坐标系统的电流值各自根据正弦波变化。因此,无论是否存在异常,都会引起电流偏差。因此,在两相驱动操作中不能检测到这种异常。
发明内容
因此,本发明的目的是提供一种马达控制器和一种电动助力转向装置,它们以高精确度检测异常,同时有效地抑制在任何一相中电流流动发生故障时而进行的两相驱动操作中的转矩脉动。
为了实现上述目的,并且根据本发明的第一方面,提供了一种马达控制器,具有:信号输出装置,其输出马达控制信号;和驱动电路,其基于马达控制信号向马达供应三相驱动电力。信号输出装置包括计算装置、信号产生装置和异常检测装置,所述计算装置计算d/q坐标系统的d轴电流命令值和q轴电流命令值作为电流命令值,所述信号产生装置通过基于d轴电流命令值和q轴电流命令值而进行d/q坐标系统的电流反馈控制来产生马达控制信号,所述异常检测装置能够检测马达的任何一相中的故障电流流动。当检测到故障电流流动时,信号输出装置输出使用除发生电流流动故障的相之外的两相作为电流流动相的马达控制信号。为马达的每个相电流值设定能够在马达的各相中流动的电流的最大值。当发生电流流动故障时,计算装置计算沿以与发生电流流动故障的相相应的预定转角为渐近线的正切曲线而变化的d轴电流命令值,并且,计算装置以这样的方式计算d轴电流命令值和q轴电流命令值,使得每个电流流动相的相电流值在需要基于最大值而对相电流值进行限制的转角范围中固定于最大值。
根据本发明的第二方面,提供了一种具有根据本发明第一方面的马达控制器的电动助力转向装置。
附图说明
图1是示意性示出电动助力转向装置(EPS)的立体图;
图2是示出EPS的电气配置的框图;
图3是示出用于检测发生电流流动故障的相的过程的流程图;
图4是示出(当U相中电流流动已经发生故障时)两相驱动操作中d/q轴电流的变化的曲线图;
图5是示出(当V相中电流流动已经发生故障时)两相驱动操作中d/q轴电流的变化的曲线图;
图6是示出(当W相中电流流动已经发生故障时)两相驱动操作中d/q轴电流的变化的曲线图;
图7是示出(当U相中电流流动已经发生故障时)两相驱动操作中相电流的变化的曲线图;
图8是示出(当V相中电流流动已经发生故障时)两相驱动操作中相电流的变化的曲线图;
图9是示出(当W相中电流流动已经发生故障时)两相驱动操作中相电流的变化的曲线图;
图10是示出当(U相中)电流流动已经发生故障时,在使d轴电流命令值Id*和q轴电流命令值Iq*在电流限制范围内维持固定不变的情况下所进行的电流反馈控制中的d/q轴电流的变化的曲线图;
图11是示出在不存在U相电流流动故障的情况下,在使用U相中发生电流流动故障时的d轴电流命令值而进行的电流反馈控制中的相电流的变化的曲线图;
图12是示出当(U相中)电流流动已经发生故障时,在使d轴电流命令值Id*和q轴电流命令值Iq*在电流限制范围内维持固定不变的情况下所进行的电流反馈控制中的相电流的变化的曲线图;
图13是示出用于确定是否存在异常以及切换控制模式的过程的流程图;
图14是示出用于计算在电流限制范围中的d轴电流命令值Id*和q轴电流命令值Iq*的过程的流程图;
图15是示出其中除发生电流流动故障之外的两相被用作电流流动相的传统两相驱动操作的曲线图;以及
图16是示出在传统两相驱动操作中的d轴电流和q轴电流的变化的曲线图。
具体实施方式
现在将参照附图描述为电动助力转向装置(EPS)的本发明的实施方式。
如图1所示,转向盘2固定到转向轴3。转向轴3通过齿轮齿条机构4连接到齿条轴5。转向轴3通过转向而被转动。转向轴3的转动通过齿轮齿条机构4转换成齿条轴5的线性往复运动。这改变了转向轮6的转向角。
EPS 1具有EPS作动器10和ECU 11。EPS作动器10是将辅助力施加到转向系统以辅助转向的转向力辅助设备。ECU 11是控制EPS作动器10的操作的控制装置。
EPS作动器10是齿条式EPS作动器并且由与齿条轴5共轴布置的马达12或驱动源供以动力。在EPS作动器10中,马达12产生辅助转矩,该辅助转矩通过滚珠螺旋机构(未示出)传递给齿条轴5。马达12为无刷型马达并且由从ECU 11供应的三相(U、V、W)驱动电力驱动。作为马达控制器的ECU 11通过调整由马达12产生的辅助转矩来调节施加到转向系统的辅助力(动力辅助控制)。
转矩传感器14和车速传感器15连接到ECU 11。ECU 11基于分别由转矩传感器14和车速传感器15检测的转向转矩τ和车速V操作EPS作动器10或进行动力辅助控制。
下面将说明根据图示实施方式的EPS 1的电气配置。
如图2所示,ECU 11具有微型计算机17和驱动电路18。微型计算机17是输出马达控制信号的信号输出装置。驱动电路18基于马达控制信号向马达12供应三相电力。
驱动电路18是公知的PWM变换器,其通过并联连接与各相相应的三个基本单元(臂)而构成。每个基本单元由一对串联连接的开关元件形成。由微型计算机17输出的马达控制信号限定形成驱动电路18的每个开关元件的接通占空比。当马达控制信号提供给每个开关元件的门接线端时,开关元件响应于马达控制信号而被选择性地接通和断开。这会将安装在车辆中的电源(未示出)的直流电压转换成三相(U、V、W)驱动电力。该驱动电力然后被供应给马达12。
ECU 11具有分别检测相电流值Iu、Iv、Iw的电流传感器21u、21v、21w,以及检测马达12的转角θ的转角传感器22。根据基于这些传感器的检测信号检测的马达12的相电流值Iu、Iv、Iw和转角θ以及根据转向转矩τ和车速V,微型计算机17向驱动电路18输出马达控制信号。
微型计算机17包括用作计算装置的计算部分23和用作信号产生装置的信号产生部分24。计算部分23计算电流命令值作为施加到转向系统的辅助力的目标控制量。信号产生部分24基于由计算部分23提供的电流命令值产生马达控制信号。
基于分别由转矩传感器14和车速传感器15检测到的转向转矩τ和车速V,计算部分23计算d轴电流命令值Id*和q轴电流命令值Iq*。计算部分23然后将获得的d轴电流命令值Id*和q轴电流命令值Iq*输出到信号产生部分24。连同由计算部分23提供的d轴电流命令值Id*和q轴电流命令值Iq*,信号产生部分24接收由相应的电流传感器21u、21v、21w检测到的相电流值Iu、Iv、Iw以及由转角传感器22检测到的转角θ。基于相电流值Iu、Iv、Iw和转角θ(电角度),信号产生部分24通过对d-q坐标系统中的电流进行反馈控制而产生马达控制信号。
具体地,在信号产生部分24中,相电流值Iu、Iv、Iw和转角θ一起被输入到用作三相/两相转换部分的第一转换部分25。第一转换部分25将相电流值Iu、Iv、Iw转换成d/q坐标系统中的d轴电流值Id和q轴电流值Iq。由计算部分23输出的d轴电流命令值Id*和q轴电流命令值Iq*与d轴电流值Id和q轴电流值Iq中相应的一个一起被分别输入到减法器26d和减法器26q。在正常控制下,计算部分23输出“0”作为d轴电流命令值Id*(Id*=0)。
由减法器26d计算的d轴电流偏差ΔId发送给F/B控制部分27d。同样,由减法器26q获得的q轴电流偏差ΔIq输入到F/B控制部分27q。F/B控制部分27d进行反馈控制,以便使代表实际电流的d轴电流值Id追从由计算部分23输出的d轴电流命令值Id*。类似地,F/B控制部分27q进行反馈控制,以便使代表实际电流的q轴电流值Iq追从由计算部分23输出的q轴电流命令值Iq*。
具体地,F/B控制部分27d通过将d轴电流偏差ΔId乘以预定F/B增益(PI增益)而获得d轴电压命令值Vd*。F/B控制部分27q通过将q轴电流偏差ΔIq乘以预定F/B增益(PI增益)而确定q轴电压命令值Vq*。分别由F/B控制部分27d和F/B控制部分27q提供的d轴电压命令值Vd*和q轴电压命令值Vq*连同转角θ被输入到为两相/三相转换部分28的第二转换部分28。第二转换部分28将d轴和q轴电压命令值Vd*、Vq*转换成三相电压命令值VuU、Vv*、Vw*。
电压命令值Vu*、Vv*、Vw*输入到PWM转换部分29。PWM转换部分29产生与电压命令值Vu*、Vv*、Vw*相应的负荷命令值αu、αv、αw。信号产生部分24产生具有由每个负荷命令值αu、αv、αw表示的接通占空比的马达控制信号。微型计算机17输出马达控制信号到形成驱动电路18的开关端(的门接线端)。通过这种方式,微型计算机17控制驱动电路18的操作或者控制通向马达12的驱动电力的供应。
[异常发生时的控制]
如图2所示,ECU 11的微型计算机17具有确定部分31,该确定部分31在EPS 1中发生任何异常时识别异常的类型。ECU 11(微型计算机17)以与由确定部分31识别的异常的类型相一致的方式改变马达12的控制模式。
具体地,确定部分31接收异常信号S_tr,以便检测EPS作动器10的机械结构中的异常。响应于异常信号S_tr,确定部分31检测EPS 1的机械系统中的异常。确定部分31还接收q轴电流命令值Iq*,q轴电流值Iq,相电流值Iu、Iv、Iw,马达12的转动角速度ω,以及各相的负荷命令值αu、αv、αw。基于各条件量,确定部分31检测控制系统中异常的发生。
更具体地,确定部分31监测q轴电流偏差ΔIq,以整体检测控制系统中异常的发生,包括转矩传感器14的故障和驱动电路18的故障。换句话说,确定部分31将q轴电流偏差ΔIq与预定阈值进行比较。如果q轴电流偏差ΔIq在比预定时间长的时间上保持大于或等于阈值,则确定部分31确定在控制系统中已经发生异常。
确定部分31还基于相电流值Iu、Iv、Iw,转动角速度ω以及各相的负荷命令值αu、αv、αw来检测发生电流流动故障的相,所述电流流动故障由电力线路(包括马达线圈)断开或驱动电路18的失效接触引起。这种检测根据当X相(X=U、V、W)的相电流值Ix小于或等于预定值Ith(|Ix|≤Ith)并且转动角速度ω处在确定是否已经发生断开情形的目标范围内(|ω|≤ω0)时、对应于x相的负荷命令值αx是否持续地处于预定范围之外(αLo≤α≤αHi)来进行。预定范围(αLo≤α≤αHi)设定为与阈值ω0相应的值的范围,其中值Ith和目标范围根据该阈值ω0限定。
在这种情况下,值Ith或相电流值Ix的阈值设定为接近“0”的值。转动角速度ω的阈值ω0设定为与马达的基本速度(最大转数)相应的值。负荷命令值αx的阈值αLo和αHi分别设定为小于正常控制中负荷命令值αx的下限值的值和大于正常控制中负荷命令值αx的上限值的值。
具体地,参照图3的流程图,确定部分31确定所检测到的相电流值Ix的绝对值是否小于或等于值Ith(步骤101)。如果相电流值Ix的绝对值小于或等于值Ith(|Ix|≤Ith,步骤101:是),则确定部分31确定转动角速度ω的绝对值是否小于或等于预定的阈值ω0(步骤102)。如果转动角速度ω小于或等于阈值ω0(|ω|≤ω0,步骤102),则确定部分31确定负荷命令值αx是否在预定范围中(αLo≤αx≤αHi,步骤103)。如果负荷命令值αx在预定范围之外(步骤103:否),则确定部分31确定在X相中电流流动已经发生故障(步骤104)。
如果相电流值Ix大于值Ith(|Ix|>Ith,步骤101:否),转动角速度ω大于阈值ω0(|ω|>ω0,步骤102:否)或者负荷命令值αx在上述的预定范围中(αLo≤αx≤αHi,步骤103:是),则确定部分31确定X相没有电流流动故障(确定出X相正常运转,步骤105)。
也就是说,如果在X相(U、V、W相中的任何一相)中已经发生电流流动故障(断开),那么X相的相电流值Ix变为“0”。相电流值Ix在除发生故障之外的以下两种情况中可以变为“0”或“接近0的值”。
--马达的转动角速度达到基本速度(最大转数)。
--电流命令值基本为“0”。
因此,确定部分31首先将属于确定对象的X相的相电流值Ix与预定值Ith进行比较,以确定相电流值Ix是否为“0”。然后,确定部分31确定当前情况是否符合除断开情况之外的其中相电流值Ix变为“0”或“接近0”的上述两种情况中的任何一种。如果当前情况不符合任何一种情况,则确定部分31确定在X相中存在断开情形。
具体地,如果尽管相电流值Ix不像小于或等于接近0的值Ith的值那么小但是负荷命令值αx处于极端水平,则确定部分31确定在X相中已经发生电流流动故障。在图示实施方式中,确定部分31通过对U、V和W相中的各相进行上述确定来识别其中已经发生电流流动故障的相。
虽然在出于图示目的的图3的流程图中将其省略,不过确定部分仅在电源电压大于或等于驱动马达12所需的规定电压时才进行这种确定。在指定步骤104中,确定部分31根据电流流动故障已经发生的确定状态是否持续预定的时间段来最终确定已经检测到异常。
ECU 11(微型计算机17)根据确定部分31的确定结果来切换马达12的控制模式。具体地,确定部分31输出包括电流流动故障检测的确定结果作为异常检测信号S_tm。然后,计算部分23计算与异常检测信号S_tm相应的电流命令值,并且信号产生部分24产生马达控制信号。通过这种方式,微型计算机17将马达12的控制模式从一种模式切换到另一模式。
更具体地,ECU 11具有三种控制模式。所述控制模式是:“正常控制模式”,用于正常状态;“辅助暂停模式”,用于在已经发生异常并因此而必须停止马达12时的情况;以及“两相驱动模式”,用于在马达12的任何一相中已经发生电流流动故障时的情况。如果异常检测信号S_tm符合“正常控制模式”,那么计算部分23计算正常状态的d轴电流命令值Id*和q轴电流命令值Iq*。信号产生部分24相应地产生马达控制信号。
如果异常检测信号S_tm符合“辅助暂停模式”,那么计算部分23计算d轴电流命令值Id*和q轴电流命令值Iq*,并且信号产生部分24以使马达12停止的方式产生马达控制信号。如果在机械系统或转矩传感器14中发生异常,或者如果在供电系统中引起了例如产生过电流的异常,则选择“辅助暂停模式”。进一步地,根据“辅助暂停模式”,马达12可立即停止或者可在通过减小马达12的输出而逐渐减小辅助力之后停止。在后一种情况下,计算部分23逐渐减小q轴电流命令值Iq*的绝对值。在停用马达12之后,微型计算机17将形成驱动电路18的开关元件切换到断开状态,并且断开未图示的电源继电器。
对应于“两相驱动模式”的异常检测信号S_tm携带标识出其中发生电流流动故障的相的信息。如果异常检测信号S_tm对应于“两相驱动模式”,那么信号产生部分24产生马达控制信号,该控制信号指示使用除发生电流流动故障的相之外的两相作为电流流动相。
在“两相驱动模式”下,依据所检测到的发生电流流动故障的相,计算部分23使用下面的表达式(1)到(3)来计算d轴电流命令值Id*:
当在U相中电流流动发生故障时:
当在V相中电流流动发生故障时:
当在W相中电流流动发生故障时:
参照图4到图6,依据q轴电流命令值Iq*的符号,d轴电流命令值Id*以预定转角θA、θB作为渐近线而单调非减(当Iq*>0时)或者单调非增(当Iq*<0时)。更具体地,d轴电流命令值Id*沿正切曲线(正切:tanθ)或者呈正切曲线变化。
为了便于下面的说明,在从0°到360°的电角度范围中,与渐近线相应的两个转角中较小的一个将称作转角θA,而较大的一个将称作转角θB。如图4所示,当在U相中已经发生异常并且电流因此而被引入到为V相和W相的其它两相中时,转角θA和转角θB分别是“90°”和“270°”。参照图5,当V相中的电流流动已经发生故障时,转角θA是“30°”,转角θB是“210°”。参照图6,当W相中的电流流动已经发生故障时,转角θA是“150°”,转角θB是“330°”。
在使用上述表达式(1)到(3)计算d轴电流命令值Id*中,q轴电流命令值Iq*是与正常状态的q轴电流命令值Iq*相同的值,或者是与马达转矩的目标值相应的初始值“Iq_as”。
基于d轴电流命令值Id*和q轴电流命令值Iq*,信号产生部分24对d/q坐标系统中的电流进行反馈控制。通过这种方式,信号产生部分24产生马达控制信号,以便进行使用除发生电流流动故障的相之外的两相作为电流流动相的两相驱动操作控制。
也就是说,在两相驱动操作中,信号产生部分24基于根据由表达式(1)到(3)确定的正切曲线而变化的d轴电流命令值Id*进行电流反馈控制。通过这种方式,在U、V、W相的各相中产生如由下面的表达式(4)到(9)所表示的、根据以转角θA、θB作为渐近线的正割曲线或余割曲线变化的相电流(见图7到9)。发生电流流动故障的相的相电流值是“0”。正割曲线对应于sinθ的倒数(余割:cosecθ),余割曲线对应于cosθ的倒数(正割:secθ)。
当在U相中电流流动发生故障时:
当在V相中电流流动发生故障时:
当在W相中电流流动发生故障时:
因此,在理论上,除了与转角θA、θB相应的值之外,在d/q坐标系统中产生遵从q轴电流命令值Iq*的q轴电流值Iq。
换句话说,如果马达12的转角θ不是转角θA、θB,则在理论上能够产生与所要求的转矩相应的q轴电流值Iq。也就是说,q轴电流值Iq产生为等于q轴电流命令值Iq*的值,该q轴电流命令值Iq*为马达转矩的目标值。通过这种方式,由两相驱动操作而引起的转矩脉动的发生在这种操作中得以抑制。此外,在维持改进的转向舒适度的同时,持续地施加辅助力。
设定用于能够在各相的马达线圈12u、12v、12w中流动的电流的绝对值的最大值Ix_max。如果电流反馈控制基于在整个转角范围上都沿正切曲线变化的d轴电流命令值Id*进行,则有可能产生超过最大值Ix_max的相电流。
因此,在两相驱动操作中,计算部分23以这样的方式计算d轴电流命令值Id*和q轴电流命令值Iq*,使得作为电流流动相运转的两相的相电流值变为小于或等于上限值(Ix_max)并且大于或等于下限值(-Ix_max)。这确保了马达的最大输出性能,并且抑制了由于超过最大值Ix_max的电流流动而引起的驱动电路的开关元件或者所述相的马达线圈的变热。因此马达得以稳定地运转。
具体地,如果电流反馈控制基于在整个转角范围上都沿正切曲线变化的d轴电流命令值Id*进行,则计算部分23首先确定所检测到的马达12的转角θ是否在这样的转角范围中,即在该范围中在电流流动相中产生超过最大值Ix_max的相电流。
更具体地,其中在各相中流动的电流的值必须进行限制的转角范围是其中相电流值变为大于或等于最大值Ix_max的范围(Ix≥Ix_max,Ix≤-Ix_max)。换句话说,电流限制范围是位于与渐近线中的一条相应的转角θA附近的转角θ1到转角θ2的转角范围,或者是位于与渐近线中的另一条相应的转角θB附近的转角θ3到转角θ4的转角范围。因此,通过将与最大值Ix_max相应的上限值(+Ix_max)和下限值(-Ix_max)代入上述表达式(4)到(9)中来获得转角θ的解,限定电流限制范围的四个转角θ1、θ2、θ3、θ4便得以确认。
也就是说,如果发生电流流动故障的相是U相(当U相中的电流流动已经发生故障时),使用表达式(10)、(11)、(12)和(13)进行计算,每个表达式(10)、(11)、(12)和(13)是将相电流值的上限值和下限值代入上述表达式(4)中而获得。通过这种方式,与渐近线相应的转角θA、θB的其中之一得以确定。换句话说,获得了限定转角θA附近的电流限制范围的转角θ1、θ2。
当在U相中电流流动发生故障时:
如果Iq*≥0,
如果Iq*<0,
表达式(10)到(13)的解或者转角θ1、θ2由cosθ的逆函数(反余弦)表示。因此,满足下面的等式:cos(-θ)=cosθ;cos(θ+2π)=cosθ。因此,使用下面的表达式(14)和(15)计算预定转角中的其相位与转角θA的相位偏移2π的另一转角。也就是说,获得了限定转角θB附近的电流限制范围的转角θ3、θ4。
θ3=2π-θ2 …(14)
θ4=2π-θ1 …(15)
类似地,如果发生电流流动故障的相是V相(当V相中的电流流动已经发生故障时),则使用表达式(16)、(17)、(18)和(19)进行计算,每个表达式(16)、(17)、(18)和(19)是将相电流值的上限值和下限值代入上述表达式(6)中而获得。通过这种方式,获得了与渐近线相应的转角θA、θB的其中之一,即限定转角θA附近的电流限制范围的转角θ1、θ2。
当在V相中电流流动发生故障时:
如果Iq*≥0,
如果Iq*<0,
表达式(16)到(19)的解或者转角θ1、θ2由sinθ的逆函数(反正弦)表示。因此,基于等式sin(π-θ)=sinθ,限定转角θA附近的电流限制范围的转角θ1、θ2与其相位与转角θA的相位偏移2π的其它预定转角或者与限定转角θB附近的电流限制范围的转角θ3、θ4之间的关系满足下面的表达式(20)和(21)。通过使用表达式(20)、(21)进行计算,其它转角θ3、θ4得以确定。
此外,如果发生电流流动故障的相是W相(当W相中的电流流动已经发生故障时),使用表达式(22)、(23)、(24)和(25)进行计算,每个表达式(22)、(23)、(24)和(25)是将相电流值的上限值和下限值代入上述表达式(9)中而获得。通过这种方式,获得了与渐近线相应的转角θA、θB的其中之一,即限定转角θB附近的电流限制范围的转角θ3、θ4。
当在W相中电流流动发生故障时:
如果Iq*≥0,
如果Iq*<0,
表达式(23)到(25)的解或者转角θ3、θ4由sinθ的逆函数(反正弦)表示。因此,基于等式sin(π-θ)=sinθ,限定转角θB附近的电流限制范围的转角θ3、θ4与其相位与转角θB的相位偏移2π的其它预定转角或者与限定转角θA附近的电流限制范围的转角θ1、θ2之间的关系满足下面的表达式(26)和(27)。
通过使用表达式(26)和(27)进行计算,其它转角θ1、θ2得以确定。
通过这种方式,确定部分31计算转角θ1、θ2、θ3、θ4,这些转角限定位于与两条渐近线相应的预定转角θA、θB附近的相应电流限制范围。如果所检测到的马达12的转角θ落在电流限制范围(θ1<θ<θ2,θ3<θ<θ4)中的任何一个范围中,确定部分31便以这样的方式确定d轴电流命令值Id*和q轴电流命令值Iq*,使得电流流动相的相电流值固定在上限值(Ix_max)或下限值(-Ix_max)。
具体地,确定部分31使用下面的表达式(28)到(51)且依据所确认的发生电流流动故障的相和q轴电流命令值Iq*的符号来计算d轴电流命令值Id*和q轴电流命令值Iq*。
当在U相中电流流动发生故障时:
如果θ1<θ<π/2或者3π/2<θ<θ4
如果π/2<θ<θ2或者θ3<θ<3π/2
当在V相中电流流动发生故障时:
如果θ1<θ<π/6或者7π/6<θ<θ4
如果π/6<θ<θ2或者θ3<θ<7π/6
当在W相中电流流动发生故障时:
如果θ1<θ<5π/6或者11π/6<θ<θ4
如果5π/6<θ<θ2或者θ3<θ<11π/6
通过这种方式,在确保最大马达输出性能以及确保马达的稳定持续控制的同时,以改进的精确度检测控制系统中的异常。
具体地,参照图10,简单地通过在使d轴电流命令值Id*和q轴电流命令值Iq*在各个电流限制范围(θ1<θ<θ2,θ3<θ<θ4)内维持固定不变的情况下进行电流反馈控制,d轴电流Id并不追从d轴电流命令值Id*。图10示出了当U相中的电流流动已经发生故障时的示例。换句话说,在正常状态(当各相中的正常电流流动都得到保证时)下,相电流如图11所示地在马达的相中流动。因此,d轴电流值Id遵循d轴电流命令值Id*。相比之下,如果任何一相中的电流流动发生故障并且进行两相驱动操作,则发生电流流动故障的相的电流值变为“0”。在这种状态下,电流流动相的相电流值呈现出如图12所示的波形。因此,d轴电流值Id并不追从d轴电流命令值Id*。因此,马达12的输出不能够最大化。
但是,通过基于由表达式(28)到(51)确定的d轴电流命令值Id*和q轴电流命令值Iq*来进行电流反馈控制,d轴电流值Id和q轴电流值Iq分别变为在上述电流限制范围中追从d轴电流命令值Id*和q轴电流命令值Iq*的值。也就是说,电流流动相的相电流值在电流限制范围中固定在上限值(Tx_max)或下限值(-Tx_max)。这确保了马达的最大输出性能。
此外,通过预先将q轴电流命令值Iq*确定在使得q轴电流值Id能够追从与q轴电流命令值Iq*相应的值的范围中,确保了在电流限制范围中基于q轴电流偏差ΔIq所进行的异常检测的可靠性。因此,在两相驱动操作中,控制系统中的异常检测得以以增加的精确度进行。
接下来,将说明用于使用微型计算机进行上述异常检测以及切换控制模式的过程、以及用于产生马达控制信号的过程。
参照图13,微型计算机17首先确定是否已经发生任何异常(步骤201)。如果确定异常已经发生(步骤201:是),那么微型计算机17确定在控制系统中是否已经发生异常(步骤202)。如果确定异常位于控制系统中(步骤202:是),那么微型计算机17确定当前控制模式是否是两相驱动模式(步骤203)。如果当前驱动模式不是两相驱动模式(步骤203:否),那么微型计算机17确定控制系统的异常是否对应于任何一相中的电流流动故障(步骤204)。如果确定电流流动故障已经在任何一相中发生(步骤204:是),那么微型计算机17输出马达控制信号,该信号指示使用除发生电流流动故障的相之外的其它两相作为电流流动相(两相驱动模式,步骤205)。
在步骤205,如已描述,依据所识别出的发生电流流动故障的相、并且根据所检测到的转角θ是否落在任何一个电流限制范围(θ1<θ<θ2,θ3<θ<θ4)中,微型计算机17计算d轴电流命令值Id*和q轴电流命令值Iq*。
具体地,如图14中的流程图所示,微型计算机17确定所检测到的转角θ是否在电流限制范围中(步骤301)。如果转角θ在电流限制范围之外(步骤301:否),则微型计算机17使用表达式(1)到(3)计算d轴电流命令值Id*(步骤302)。在这种情况下,微型计算机17计算与正常状态(当相中的正常电流流动得到保证时)的q轴电流命令值Iq*相同的值,或者与马达转矩的目标值相应的初始值(Iq*=Iq_as*)。
如果所检测到的转矩θ落在电流限制范围中(步骤301:是),那么微型计算机17使用表达式(28)到(51)计算d轴电流命令值Id*和q轴电流命令值Iq*(步骤303)。
相对之下,如果在步骤201中确定不存在异常(步骤201:否),那么微型计算机17输出用于正常状态的马达控制信号(Id*=0,正常控制模式,步骤206)。如果确定异常发生在控制系统之外(步骤202:否)、当前控制模式是两相驱动模式(步骤203:是)、或者异常并不是在任何一相中的电流流动故障(步骤204:否),那么微型计算机17切换到辅助暂停模式(步骤207)。微型计算机17然后输出马达控制信号,该信号指示停止马达12的运转并且断开电源继电器。
所述的实施方式具有下面的优点。
如果存在发生电流流动故障的任何相,微型计算机17便会计算沿以预定转角θA、θB为渐近线的正切曲线变化的d轴电流命令值Id*。然后,微型计算机17基于d轴电流命令值Id*进行电流反馈控制,并因此而持续地输出使用除发生电流流动故障的相之外的两相作为电流流动相的马达控制信号。在两相驱动操作中,微型计算机17以这样的方式计算d轴电流命令值Id*和q轴电流命令值Iq*,使得电流流动相的相电流值在相电流值依据最大值而受到限制的转角范围或者电流限制范围(θ1<θ<θ2,θ3<θ<θ4)中固定于针对各相设定的所述最大值。
通过这种方式,除了在与渐近线相应的预定转角θA、θB附近的电流限制范围(θ1<θ<θ2,θ3<θ<θ4)之外,产生了与所要求的转矩(q轴电流命令值Iq*)相应的马达电流(q轴电流值Iq)。因此,即使任何一相中的电流流动发生故障,转矩脉动的发生也得到抑制。这样,在维持改进的转向舒适度的同时,持续地施加辅助力。此外,通过在电流限制范围中使电流流动相的相电流值维持在固定值即上限值(Ix_max)或下限值(-Ix_max),确保了马达的最大输出性能。此外,通过预先确定能够通过q轴电流值Iq而得到的q轴电流命令值Iq*,确保了在电流限制范围中基于q轴电流偏差Δq所进行的异常检测的可靠性。因此,即使在两相驱动操作中,也能够以增加的精确度检测控制系统中的异常。
所述的实施方式可以按下面的形式修改。
虽然在所述的实施方式中本发明实施为电动助力转向装置(EPS),不过本发明可以实施为除用在EPS之外的其他用途的马达控制器。
在所述的实施方式中,ECU 11或者马达控制器根据三种模式操作,所述三种模式即“正常控制模式”、“辅助暂停模式”和“两相驱动模式”。但是,用于异常发生时的控制模式不限于这三种模式。也就是说,只要是在使用除发生电流流动故障的相之外的两相作为电流流动相的情况下对马达的操作进行,就可以使用任何合适的马达控制器。此外,可以使用除所述的实施方式中的方法之外的异常检测方法。
在两相驱动操作中计算的d轴电流命令值Id*不必非得确切地等于根据表达式(1)到(3)而获得的值。但是,如果d轴电流命令值Id*使用表达式(1)到(3)确定,那么q轴电流值Iq被产生成最接近于q轴电流命令值Iq*的值。所产生的值越靠近由表达式确定的d轴电流命令值Id*,所获得的效果就越显著。
在所述的实施方式中,根据本发明,控制系统中的异常检测是基于q轴电流偏差ΔIq进行的。但是,只要这种异常检测是基于d-q坐标系统的电流偏差进行的,检测可以基于d/q坐标系统的d轴电流偏差ΔId或者合成向量偏差来进行。
Claims (3)
1.一种马达控制器,包括:信号输出装置,其输出马达控制信号;和驱动电路,其基于所述马达控制信号向马达供应三相驱动电力,其中,所述信号输出装置包括计算装置、信号产生装置和异常检测装置,所述计算装置计算d/q坐标系统的d轴电流命令值和q轴电流命令值作为电流命令值,所述信号产生装置通过基于所述d轴电流命令值和所述q轴电流命令值而进行所述d/q坐标系统的电流反馈控制来产生所述马达控制信号,所述异常检测装置能够检测所述马达的任何一相中的故障电流流动,并且,当检测到故障电流流动时,所述信号输出装置输出使用除发生电流流动故障的相之外的两相作为电流流动相的马达控制信号,
所述马达控制器的特征在于,为所述马达的每个相电流值的绝对值设定能够在所述马达的各相中流动的电流的最大值,
其中,当发生电流流动故障时,所述计算装置计算沿以与发生电流流动故障的相相应的预定转角作为渐近线的正切曲线而变化的d轴电流命令值,并且,所述计算装置以这样的方式计算d轴电流命令值和q轴电流命令值,使得每个所述电流流动相的相电流值在需要基于所述最大值对所述相电流值进行限制的转角范围中固定于所述最大值。
2.根据权利要求1所述的马达控制器,其特征在于,当发生电流流动故障且转角处在不需要对所述相电流进行限制的范围中时,所述计算装置使用下面的表达式依据发生电流流动故障的相来计算所述d轴电流命令值:
当U相中发生电流流动故障时:
当V相中发生电流流动故障时:
当W相中发生电流流动故障时:
其中,θ:转角,Id*:d轴电流命令值,Iq*:q轴电流命令值,并且,在需要对所述相电流进行限制的转角范围中,所述计算装置使用下面的表达式计算d轴电流命令值和q轴电流命令值:
当U相中发生电流流动故障时:
如果θ1<θ<π/2或者3π/2<θ<θ4
如果π/2<θ<θ2或者θ3<θ<3π/2
假设:
θ3=2π-θ2
θ4=2π-θ1
当V相中发生电流流动故障时:
如果θ1<θ<π/6或者7π/6<θ<θ4
如果π/6<θ<θ2或者θ3<θ<7π/6
假设:
当W相中发生电流流动故障时:
如果θ1<θ<5π/6或者11π/6<θ<θ4
如果5π/6<θ<θ2或者θ3<θ<11π/6
假设:
其中,Id*:d轴电流命令值,Iq*:q轴电流命令值,Ix_max:能够流动的电流的最大值。
3.一种电动助力转向装置,其特征在于,所述电动助力转向装置具有如权利要求1或2所述的马达控制器。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007147188A JP5056175B2 (ja) | 2007-06-01 | 2007-06-01 | モータ制御装置及び電動パワーステアリング装置 |
| JP2007-147188 | 2007-06-01 | ||
| JP2007147188 | 2007-06-01 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101314362A CN101314362A (zh) | 2008-12-03 |
| CN101314362B true CN101314362B (zh) | 2012-11-14 |
Family
ID=39719147
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2008100983835A Expired - Fee Related CN101314362B (zh) | 2007-06-01 | 2008-05-30 | 马达控制器和电动助力转向装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7782000B2 (zh) |
| EP (1) | EP1997713B1 (zh) |
| JP (1) | JP5056175B2 (zh) |
| CN (1) | CN101314362B (zh) |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4876838B2 (ja) * | 2006-10-12 | 2012-02-15 | 株式会社ジェイテクト | モータ制御装置 |
| US7990094B2 (en) * | 2007-06-20 | 2011-08-02 | Jtekt Corporation | Motor controller and electric power steering apparatus |
| JP5338544B2 (ja) * | 2009-07-28 | 2013-11-13 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| DE102009045351A1 (de) * | 2009-10-06 | 2011-04-14 | Robert Bosch Gmbh | Verfahren zum Betreiben eines Antriebsaggregats sowie Antriebsaggregat |
| US8283881B2 (en) * | 2010-03-09 | 2012-10-09 | GM Global Technology Operations LLC | Methods, systems and apparatus for synchronous current regulation of a five-phase machine |
| JP5672936B2 (ja) * | 2010-10-18 | 2015-02-18 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP5406226B2 (ja) * | 2011-01-07 | 2014-02-05 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| CN102582679B (zh) | 2011-01-07 | 2015-06-17 | 本田技研工业株式会社 | 电动助力转向装置 |
| JP5862135B2 (ja) * | 2011-09-12 | 2016-02-16 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP5811402B2 (ja) * | 2011-12-26 | 2015-11-11 | 株式会社ジェイテクト | 操舵装置 |
| US9623912B2 (en) | 2012-09-20 | 2017-04-18 | Polaris Industries Inc. | Utility vehicle |
| US9440671B2 (en) | 2012-09-20 | 2016-09-13 | Polaris Industries Inc. | Vehicle |
| KR101532602B1 (ko) * | 2013-11-29 | 2015-06-30 | 현대모비스 주식회사 | 전동식 조향 장치의 모터 고장 검출 방법 |
| JP5929878B2 (ja) * | 2013-12-06 | 2016-06-08 | 株式会社デンソー | 制御装置、および、これを用いたシフトバイワイヤシステム |
| JP6368588B2 (ja) * | 2014-08-27 | 2018-08-01 | 日立オートモティブシステムズ株式会社 | フィードバック制御装置、電動パワーステアリング装置 |
| KR20170072935A (ko) * | 2014-12-16 | 2017-06-27 | 비와이디 컴퍼니 리미티드 | 전기 자동차, 전기 자동차의 능동적 안전 제어 시스템, 전기 자동차의 능동적 안전 제어 시스템을 위한 제어 방법 및 모터 제어기 |
| JP6483039B2 (ja) * | 2016-01-26 | 2019-03-13 | 株式会社日立製作所 | 電力変換装置 |
| JP6662081B2 (ja) * | 2016-02-17 | 2020-03-11 | 株式会社デンソー | 3相回転機の制御装置、及び、電動パワーステアリング装置 |
| JP2017226305A (ja) * | 2016-06-22 | 2017-12-28 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| CN109863684B (zh) | 2016-09-02 | 2023-06-06 | 康斯博格股份有限公司 | 用于限制提供给电动转向系统中的电动机的电流的技术 |
| WO2019102539A1 (ja) * | 2017-11-22 | 2019-05-31 | 三菱電機株式会社 | 回転電機制御装置及び電動車両 |
| US10793181B2 (en) | 2018-02-13 | 2020-10-06 | Polaris Industries Inc. | All-terrain vehicle |
| JP6950598B2 (ja) * | 2018-03-15 | 2021-10-13 | トヨタ自動車株式会社 | モータ制御装置、モータ制御プログラム及びモータ制御方法 |
| CN115776264A (zh) * | 2021-09-07 | 2023-03-10 | 博世华域转向系统有限公司 | 一种用于断相情况下实现电机控制的方法 |
| CN114142789B (zh) * | 2021-11-30 | 2024-06-21 | 江苏经纬轨道交通设备有限公司 | 电机控制方法、系统及存储介质 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1277584A (zh) * | 1997-10-29 | 2000-12-20 | 腓特烈斯港齿轮工厂股份公司 | 用于汽车的电动助力转向器 |
| CN1509926A (zh) * | 2002-12-20 | 2004-07-07 | 大众汽车有限公司 | 具有损伤程度自诊断系统的汽车机电转向装置 |
| EP1737116A1 (en) * | 2004-03-19 | 2006-12-27 | Mitsubishi Denki Kabushiki Kaisha | Motor controller |
Family Cites Families (45)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2107177A (en) * | 1934-11-01 | 1938-02-01 | Bell Telephone Labor Inc | Stranded conductor |
| US2106177A (en) * | 1936-12-15 | 1938-01-25 | Victor J Hultquist | Building unit |
| US2514536A (en) * | 1947-08-11 | 1950-07-11 | Clyde D Burney | Plant growing block for a decorative fence construction |
| US2513177A (en) * | 1947-09-15 | 1950-06-27 | Irwin Sue Urth | Roasting rack |
| US4697130A (en) * | 1985-01-31 | 1987-09-29 | Westinghouse Electric Corp. | Induction motor regenerative brake control apparatus and method |
| US5006967A (en) * | 1989-05-22 | 1991-04-09 | Gary Diamond | Self-illuminating glass block construction unit |
| DE69313744T2 (de) | 1992-06-10 | 1998-04-09 | Fuji Electric Co Ltd | Wechselstrom-Antriebseinrichting mit veränderbarer Geschwindigkeit und Elektrofahrzeug hierfür |
| JP3479730B2 (ja) * | 1994-10-20 | 2003-12-15 | 光洋精工株式会社 | 電動パワーステアリング装置 |
| JP3362537B2 (ja) * | 1994-12-27 | 2003-01-07 | 日産自動車株式会社 | 電気自動車用駆動モータのフェールセーフ制御 |
| US5565153A (en) * | 1995-03-14 | 1996-10-15 | Sartorius Ag | Process of making polyvinylidene fluoride membranes |
| JP3168986B2 (ja) * | 1998-05-28 | 2001-05-21 | トヨタ自動車株式会社 | 電動機制御装置および制御方法 |
| DE59914974D1 (de) * | 1998-09-24 | 2009-04-23 | Levitronix Llc | Permanentmagnetisch erregter elektrischer Drehantrieb |
| JP4154101B2 (ja) * | 1999-12-28 | 2008-09-24 | 株式会社ジェイテクト | 電動パワーステアリング装置のためのモータ制御装置 |
| US7521216B2 (en) * | 1999-12-29 | 2009-04-21 | Verenium Corporation | Nitrilases and methods for making and using them |
| US6456946B1 (en) * | 2000-02-25 | 2002-09-24 | Motorola, Inc. | System and method for motor fault detection |
| USD443381S1 (en) * | 2000-04-12 | 2001-06-05 | Litex Industries, Inc. | Vanity bar light fixture |
| US6741060B2 (en) * | 2001-04-05 | 2004-05-25 | Delphi Technologies, Inc. | Method and system for controlling a permanent magnet machine during fault conditions |
| JP3600805B2 (ja) * | 2001-07-11 | 2004-12-15 | 三菱電機株式会社 | 電動パワーステアリング装置およびこれに用いられる異常検出時の制御方法 |
| USD456548S1 (en) * | 2001-07-25 | 2002-04-30 | Ying-Jue Lee | Wall fixture mounting base |
| JP3480843B2 (ja) * | 2001-09-04 | 2003-12-22 | 三菱電機株式会社 | 電動パワーステアリング制御装置及び制御方法 |
| EP2113998A3 (en) * | 2001-09-25 | 2010-03-17 | Daikin Industries, Ltd. | Phase current detection apparatus |
| US6741030B2 (en) * | 2002-06-19 | 2004-05-25 | Osram Sylvania Inc. | Control of leachable mercury in fluorescent lamps |
| JP3849979B2 (ja) * | 2002-07-02 | 2006-11-22 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JP4033030B2 (ja) * | 2003-04-21 | 2008-01-16 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP4039317B2 (ja) * | 2003-06-12 | 2008-01-30 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| US7278241B2 (en) * | 2003-07-02 | 2007-10-09 | Wirawan Margaretha H | Window assembly |
| JP2005094873A (ja) * | 2003-09-16 | 2005-04-07 | Nissan Motor Co Ltd | 3相交流電動機の制御装置 |
| US7474067B2 (en) * | 2003-10-07 | 2009-01-06 | Jtekt Corporation | Electric power steering system |
| JP4474896B2 (ja) * | 2003-10-22 | 2010-06-09 | 株式会社ジェイテクト | パワーステアリング装置 |
| JP4405788B2 (ja) * | 2003-11-18 | 2010-01-27 | 日本精工株式会社 | 電動パワーステアリング装置の制御装置 |
| JP2005176477A (ja) * | 2003-12-10 | 2005-06-30 | Favess Co Ltd | モータ制御装置およびそれを用いた車両用操舵装置 |
| US7414425B2 (en) * | 2004-05-10 | 2008-08-19 | Temic Automotive Of North America, Inc. | Damping control in a three-phase motor with a single current sensor |
| WO2006001479A1 (ja) * | 2004-06-29 | 2006-01-05 | Thk Co., Ltd. | 異常検出方法およびモータ制御装置 |
| JP4422567B2 (ja) * | 2004-06-30 | 2010-02-24 | 株式会社日立製作所 | モータ駆動装置,電動アクチュエータおよび電動パワーステアリング装置 |
| JP4539218B2 (ja) * | 2004-08-02 | 2010-09-08 | 日本精工株式会社 | 電動パワーステアリング装置 |
| JP4319112B2 (ja) * | 2004-08-27 | 2009-08-26 | 三菱電機株式会社 | 電動パワーステアリング装置 |
| JP4289458B2 (ja) * | 2004-09-07 | 2009-07-01 | 三菱電機株式会社 | 電動パワーステアリング制御装置 |
| US7005822B1 (en) | 2004-09-21 | 2006-02-28 | Motorola, Inc. | Torque ripple reduction for a voltage mode motor controller |
| WO2006057317A1 (ja) * | 2004-11-24 | 2006-06-01 | Nsk Ltd. | 無結線式モータ、その駆動制御装置及び無結線式モータの駆動制御装置を使用した電動パワーステアリング装置 |
| US7348756B2 (en) * | 2004-11-30 | 2008-03-25 | Honeywell International Inc. | Advanced current control method and apparatus for a motor drive system |
| JP4115457B2 (ja) * | 2005-03-23 | 2008-07-09 | 三菱電機株式会社 | 電動パワーステアリング装置 |
| JP2006335252A (ja) * | 2005-06-02 | 2006-12-14 | Jtekt Corp | 電動パワーステアリング装置 |
| US7193388B1 (en) * | 2006-02-02 | 2007-03-20 | Emerson Electric Co. | Offset PWM signals for multiphase motor |
| JP5070867B2 (ja) | 2007-02-05 | 2012-11-14 | 株式会社ジェイテクト | モータ制御装置及び電動パワーステアリング装置 |
| EP2080687B1 (en) * | 2008-01-16 | 2011-12-14 | Jtekt Corporation | Electric power steering device |
-
2007
- 2007-06-01 JP JP2007147188A patent/JP5056175B2/ja not_active Expired - Fee Related
-
2008
- 2008-05-28 US US12/128,304 patent/US7782000B2/en not_active Expired - Fee Related
- 2008-05-29 EP EP08157183A patent/EP1997713B1/en not_active Ceased
- 2008-05-30 CN CN2008100983835A patent/CN101314362B/zh not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1277584A (zh) * | 1997-10-29 | 2000-12-20 | 腓特烈斯港齿轮工厂股份公司 | 用于汽车的电动助力转向器 |
| CN1509926A (zh) * | 2002-12-20 | 2004-07-07 | 大众汽车有限公司 | 具有损伤程度自诊断系统的汽车机电转向装置 |
| EP1737116A1 (en) * | 2004-03-19 | 2006-12-27 | Mitsubishi Denki Kabushiki Kaisha | Motor controller |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101314362A (zh) | 2008-12-03 |
| JP5056175B2 (ja) | 2012-10-24 |
| EP1997713B1 (en) | 2011-08-31 |
| JP2008301658A (ja) | 2008-12-11 |
| EP1997713A2 (en) | 2008-12-03 |
| US7782000B2 (en) | 2010-08-24 |
| US20080297958A1 (en) | 2008-12-04 |
| EP1997713A3 (en) | 2010-04-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101314362B (zh) | 马达控制器和电动助力转向装置 | |
| CN101323316B (zh) | 马达控制器和电动助力转向装置 | |
| EP1623909B1 (en) | Electric power steering apparatus | |
| EP2280477B1 (en) | Electric power steering system | |
| US7813089B2 (en) | Motor controller and electric power steering apparatus | |
| EP1961642A1 (en) | Motor controller and electric power steering apparatus | |
| JP5070867B2 (ja) | モータ制御装置及び電動パワーステアリング装置 | |
| US20060076832A1 (en) | Electromotive power steering controller | |
| EP2043256A2 (en) | Motor controller and electric power steering apparatus | |
| JP5023833B2 (ja) | 電動パワーステアリング装置及び異常検出方法 | |
| JP4918870B2 (ja) | モータ制御装置及び電動パワーステアリング装置 | |
| JP5146133B2 (ja) | モータ制御装置及び電動パワーステアリング装置 | |
| EP1650863B1 (en) | Electric power steering apparatus and electricity supply system | |
| JP5082608B2 (ja) | モータ制御装置及び電動パワーステアリング装置 | |
| JP2010137627A (ja) | 電動パワーステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20121114 |