CN1003468B - 描笔式记录仪 - Google Patents
描笔式记录仪 Download PDFInfo
- Publication number
- CN1003468B CN1003468B CN86102080.4A CN86102080A CN1003468B CN 1003468 B CN1003468 B CN 1003468B CN 86102080 A CN86102080 A CN 86102080A CN 1003468 B CN1003468 B CN 1003468B
- Authority
- CN
- China
- Prior art keywords
- recording
- signal
- servo
- chart
- mentioned
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 11
- 230000004044 response Effects 0.000 claims abstract description 8
- 238000005259 measurement Methods 0.000 claims description 22
- 238000000034 method Methods 0.000 claims description 12
- 230000033001 locomotion Effects 0.000 claims description 5
- 230000007935 neutral effect Effects 0.000 claims description 5
- 230000008569 process Effects 0.000 claims description 2
- 239000007787 solid Substances 0.000 claims description 2
- 239000003086 colorant Substances 0.000 claims 1
- 235000012771 pancakes Nutrition 0.000 claims 1
- 230000001915 proofreading effect Effects 0.000 claims 1
- 238000004519 manufacturing process Methods 0.000 description 8
- 230000014509 gene expression Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 5
- 238000004806 packaging method and process Methods 0.000 description 4
- 238000012360 testing method Methods 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 238000000354 decomposition reaction Methods 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 239000000700 radioactive tracer Substances 0.000 description 2
- 230000008093 supporting effect Effects 0.000 description 2
- 230000004913 activation Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000033228 biological regulation Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 239000013256 coordination polymer Substances 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000005764 inhibitory process Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000010606 normalization Methods 0.000 description 1
- 238000012856 packing Methods 0.000 description 1
- 238000009527 percussion Methods 0.000 description 1
- 230000005622 photoelectricity Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images










Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08C—TRANSMISSION SYSTEMS FOR MEASURED VALUES, CONTROL OR SIMILAR SIGNALS
- G08C19/00—Electric signal transmission systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D9/00—Recording measured values
- G01D9/02—Producing one or more recordings of the values of a single variable
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D9/00—Recording measured values
- G01D9/02—Producing one or more recordings of the values of a single variable
- G01D9/04—Producing one or more recordings of the values of a single variable with provision for multiple or alternative recording
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Recording Measured Values (AREA)
Abstract
提供了一种体积紧凑、操作极为可靠的自动平衡式描笔记录仪,将记录笔滑架和自动平衡机构结合成一单一的印刷电路板,以便记录笔滑架和自动平衡机构构成一整体的伺服单元,记录笔滑架和自动平衡机构适合于响应测量信号的量值在垂直于记录纸走纸方向的方向运动。
Description
本发明涉及一种具有伺服机构的自动平衡式描笔记录仪。
描笔式记录仪广泛地用于模拟记录各种测量信号。
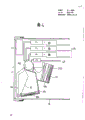
图1示出了一种先有技术的自动平衡式描笔式记录仪。图1中参数号1表示一个装有记录图纸2的图纸盒,图纸盒可拆卸式地安装在主体机架上(图中未示出);3代表一记录笔滑架,记录笔4可拆卸式地安装在此滑架上,此滑架可滑动式地安装在沿垂直于记录纸2走纸方向的方向延伸的一导向轴5上;6表示一驱动系统,使由伺服马达7驱动的记录笔滑架3沿其导向轴5进行往复移动;8是一反馈记录笔滑架3位置的电位计。伺服马达7和电位计8构成一伺服单元,伺服单元通过导线9和10,与接插件11和12连接到基板13上,然后再连接到伺服放大器板14和前置放大器板15上。
上述的先有技术的描笔式记录仪用了许多导线和插接件,因此有这样一些缺点:很难达到高的装配密度,有很多诸如不能令人满意的连接和拆解等的不足之处。
其次,为了实现多笔记录仪,每一描笔式记录仪系统必须装有如图1所示类型的伺服单元,因而需要很大的装配容积,很难将多笔式记录仪作得体积紧凑。
再其次,上述类型的先有技术描笔式记录仪没有提供一打印机构,以打印事先确定的打印事项,如打印与描笔式记录测量信号有关的记录纸的走纸速度、测量日期、测量时间、报警信号、时标以及其它的类似的事项等,因此分析记录的数据很不方便。
另外,用上述类型的先有技术的描笔式记录仪,测量信号的量值必须根据记录笔滑架3的位置和在记录纸2上记录的数据读出。换言之,很难直观地理解记录数据。在用多笔式记录仪时,这种缺点变得特别明显,在这种记录仪中,测量结果是将对应于配置在记录纸走纸方向上的相邻记录笔之间距离的时差进行校正或调整而记录在记录纸上的。
本发明做到了克服上述先有技术描笔式记录仪中所遇到的上述问题和其它问题,其目的是提供这样一种描笔式记录仪,这种记录仪因其装配密度高而体积紧凑,而且操作可靠性高、制造成本低,易于维修和操作,最适合于装配成多笔式记录仪。
以下结合附图叙述本发明的最佳实施例,由此可以更加清楚本发明上述的和其它的目的、效果、特征和优点,附图是:
图1是一种先有技术的描笔式记录仪的示意图;
图2是按照本发明的描笔式记录仪的第一个最佳实施例的透视图;
图3是与图1相同的图,但示出了其中内部零部件;
图4是图2所示的描笔式记录仪的垂直截面示意图;
图5是其中记录纸盒的透视图;
图6是其中显示单元的透视图;
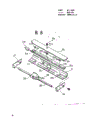
图7是其中伺服单元的透视图;
图8是在图7中所示的伺服单元中所用的磁致收缩电位计的分解透视图;
图9是一截面图,用以解释图7所示伺服单元中所用伺服马达的结构;
图10是示于图7的伺服单元的方块图;
图11是另一伺服单元的方块图;
图12是按照本发明的三笔式记录仪的最佳实施例的方块图;
图13是这样一图,用以说明由图12所示的三笔式记录仪中所用的存贮器;
图14是一程序图,用以说明由图12所示的三笔式记录仪的操作方式;
图15是这样一图,用以说明由图12所示的三笔式记录仪中记录纸的走纸速度和测量数据数目之间的关系;
图16是这样一图,用以说明由图11所示的伺服系统的操作方式;
图17是一程序图,结合图16,用以解释由图11所示的伺服系统的操作方式;
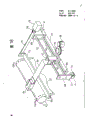
图18是一透视图,用以说明由图4所示的第一最佳实施例中打印机构的结构。
以下结合附图详细叙述本发明的最佳实施例。
图2示出了按照本发明的描笔式记录仪的第一实施例的外观;图3是其透视图,图4是其垂直截面示意图。本发明的第一实施例有三支记录笔。
参照图2、3和4,一盒形的机壳16有一可由小门17关闭或打开的敞开的侧面,盒中装有内部组件18,内部组件18可以从机壳16中拉出来。装有记录纸20的记录纸盒19可拆卸式地装在内部组件18的下前部(见图5)。记录纸盒19包括圆柱形的压纸卷筒19a第一记录纸贮存器19b和第二记录纸贮存器19c,记录纸20绕在压纸卷筒19a上,压纸卷筒可以转动;第一记录纸贮存器19b贮存尚未用过的记录纸;第二记录纸贮存器19c与第一贮存器19b形成一整体,贮存已记录过的记录纸。记录纸盒19另外还包括一压纸部件19d,用于将记录纸20b从压纸卷筒19a上引导到第二记录纸贮存器19c中。压纸部件19d的下端是装在枢轴上的,其上端处于与纸卷筒19a相对的位置并与其相隔一适当的距离。显示单元21被安装到内部组件18的上部,使显示单元21可在小门17转动方向的相反方向上转动。图6清楚地示出,显示单元21具有数字显示装置和三个条状图形显示装置231-232,数字显示装置用于数字显示测量条件、测量数据和报警信号设定电平;三个条状图形显示装置231-232用于以条形图的形式显示由三支笔P1-P2的系统得到的被测信号和报警信号的量值,条状图形显示在记录纸20宽度的方向上,并在记录纸20的有效记录宽度内显示。显示单元21还包括一显示元件24,用于显示记录方式或报警方式。由条状图形显示装置显示的条形图的颜色和由笔231-232相应加到记录纸20上的墨水的颜色一致(例如红色、蓝色和绿色)。用于设定测量条件的操作单元25被安装到内部组件18的一侧壁上。在设定测量条件时,操作者转动显示单元21直到显示单元转到与操作单元25共平面的位置。然后一边观察显示设备22,一边设定测量条件。记录笔P1-P2一支装在另一支的上面,作成为在压纸卷筒19a上方的模拟记录机构AR。而记录笔P。用于在记录纸20上记录希望要记录的事项。它作为打印机构安装在模拟记录机构AR的下面。
图7是一个透视图,用于说明在本发明中用作模拟记录机构的伺服单元的结构,图8是在由图7所示的伺服单元中所用的磁致收缩电位计的分解透视图。现在参考图7和图8,冲切成相同形状的支架26和27被相应安装到打印电路板28的前端边上,引导记录笔滑架29的导向轴30由支架26和27支承。磁致伸缩电位计31的片状的磁致伸缩线31a是在平行于记录笔滑架29移动的方向平躺在装配件31的表面上,安装有保护板31c,用以保护片状的磁致伸缩线31a。磁致伸缩元件31a利用许多连接部件31d用装配件31e构成一整体。装配件31e具有一圆形的安装孔31f和椭圆形的安装孔31g和31h。在磁致伸缩线31a已安装到安装件31b上的情况下,将从装配件31的阶梯形部分伸出的螺栓31i-31k相应嵌入安装孔31f-31h,然后再相应套上塑料环形垫圈31l-31n。随后,将保护板31c置于磁致伸缩线31a的上面,使保护板31c的端部相应装入到支架26和27的方形孔中,而同时使保护板31c的中心部分用螺钉31o牢固地连接到安装件31b上。片状磁致伸缩线31a在其一端有一驱动线圈31p。因此,磁致伸缩线31a是以这样一种方式被安装在安装件31b上的,这种方式可使磁致伸缩线31a能够沿长度方向伸长或缩短。这防止了在平板厚度方向的弯曲和温度变化所引起的形变,用此方法可以得到具有很好特性的电位计。上面绕有驱动弦线32的传动轮33和34相应安装在靠近支架26和27的地方。支架26和27的前端部相应具有U形槽26a和27a,当将伺服单元连接到记录仪的内部框架时,此U形槽用于确定伺服单元的位置。记录笔滑架29由绕在传动轮33和34上的驱动弦线32驱动进行往复运动,导向轴30穿过记录笔滑架29的中心部分。记录笔滑架29的一端有一部分同安装件31b的部件相啮合,使记录笔滑架29可沿导向轴30移动。磁致伸缩电位计31的检测线圈(图中未示出)安装在记录笔滑架29上,与磁致伸缩线31a成相对的位置关系,检测线圈通过一柔软的打印电路板36与打印电路板28进行电连接。记录笔支架37可转动式地连接到记录笔滑架29上,一记录笔(图中未示出)可拆卸式地安装在记录笔支架37上。在打印电路板28上安装有一个马达(图7中仅示出了形成马达磁回路的一轭铁板38)、一个马达驱动器、一个放大测量信号的前置放大器和一个根据电位计31的位置反馈信号和前置放大器的输出信号而获得差异信号的伺服放大器,这些部件被安装成整体结构,成为伺服单元。
图9示出了驱动图7所示的驱动轮35的马达的结构。在图7和图9中相同的参考号表示相同的部件。在图9同时用作机架的轭铁板38安装在印刷电路板28上。占据了较大的表面。另外,驱动轮35和中间齿轮39和40也装在印刷电路板28同一表面处。驱动轮35具有内齿轮齿,与中间齿轮40互相啮合,驱动弦线32绕在驱动轮35上以传动马达的转动。轴套41穿过印刷电路板28和轭铁板38,它的一端伸出轭铁板38,构成支承驱动轮35轴承,而其另一端则构成装配转子轴42的轴承43用的装配部分。圆筒形的轴套41在伸出轭铁板38的部分,在靠近它的一个端点处,在圆筒形的壁上加工出一开口以便使装在转子轴42一端上的输出齿轮44同中间齿轮39互相啮合。转子46在圆周上具有许多相间的磁铁45,此转子安装在转子轴42的另一端。应该注意,靠近转子46的磁中性点的部分要制造得薄一点,以便减轻转子46的重量。这样,转子46的转动惯量低,因而响应增加。因而伺服马达将会具有足够的响应特性。印刷电路板28有许多安装孔48,孔中相应装有许多电枢线圈47,另外两个安装孔51和52(图中未示出52)放入霍尔元件49和50(图中未示出50),此两孔在角度上彼此分开90°的电角度。印刷电路板28上还装有许多另外的装配孔,用以装配马达驱动电路中的半导体集成电路元件,并应用了轭铁板38作散热片,但是在图中未示出这些装配孔。用保护盖53保护转子46。马达被作成扁平的无刷直流马达,这样可以减小在驱动轮35和保护盖53之间的距离或高度,也可以减小安装包括变速齿轮在内的驱动马达的装配空间。结果,减小了安装各种元件,包括安装马达驱动电路元件所需要的装配空间。因此,采用这样马达,伺服单元作为一整体可以作得很薄,体积很紧凑。
图10是具有上述结构的伺服单元的方块图。在图7和图10中同样的参考号表示同样的部件。在图10中,参考号31q代表一电位控制电路;54是一前置放大器;55是一伺服放大器;56是一马达驱动电路,而M是一马达。由双点划线包围的元部件整个地装在印刷电路板28上。
采用上述结构,通过由伺服放大器55,马达M和电位器31所组成的自动平衡机构,记录笔滑架29响应加在前置放大器54上的测量信号的量值,将在垂直于记录纸走纸方向的方向上滑动,使代表测量信号量值的模拟数据记录在记录纸20上。
采用上述结构,几乎所有元件都直接焊接到印刷电路板上,这样,装配密度增加了,因而描笔式记录仪可以作得体积紧凑,制造工序也可以减少。另外,还可以消除在先有技术中所遇到的由导线和插接件所引起的麻烦。从而保证了按照本发明制作的描笔式记录仪具有高度的可靠性。其次,伺服单元的操作可以只根据伺服单元一个单元来进行检查,这样,简化和方便了检测和维修。其次,上述类型的伺服单元完全是可交换的,因此在制造多笔式记录仪时,只需要制造许多同种类型的伺服单元就够了,这样,生产质量高,制造成本低,再其次,只需要将伺服单元插入到主体机架上预定的位置,便可以完成伺服单元的安装。与先有技术多笔式记录仪不同的是,不管所用记录笔的数目如何,制造工序都保持不变,因此显著地简化了制造过程。
迄今已经叙述了安装在一个共同印刷电路上的马达和其它部件,但是应当明白,安装马达的那部分印刷电路被切去了,应先将马达安装到切去的部分上,然后才将其它部件装到印刷电路板上,并采用焊接的方法,或其它类似的方法将马达同装在印刷电路板其余部分的部件进行电连接。因此可能作到单独装配和调整马达,并容易替换马达。
此外,还可能将测量信号转变成数字信号,然后在一微处理机(称作CPU)的控制下,将此数字信号依次加到伺服系统上。图11是按上述方式的微处理机CPU控制的伺服单元的方块图。在图10和图11中相同的参考号表示相同的部件。在图11中,测量信号通过前置放大器54加到模拟/数字(A/D)转换器57上,被转换成数字信号。由A/D转换器57输出的数字输出信号通过总线58被加到微处理机CPU59上,该微处理机执行预先确定的算术运算。由微处理机CPU59输出的数字输出信号通过总线58加到数字/模拟(D/A)转换器60上,被转换成模拟信号。伺服单元然后根据由D/A转换器60输出的输出模拟信号实现自动平衡,使得例如在描笔式记录仪的情况,能够进行相邻记录笔之间时间轴的校正,以致能够得到在时间轴上不伴随相位差的模拟记录。
在相邻记录笔之间时间轴没有相位差的模拟记录的情况下,一般说,被加在伺服系统上的测量信号的量值是在一与记录纸走纸速度有关的频率下转换成数字信号的。因此,测量频率随记录纸的走纸速度,以致不可能在一预定的频率上进行测量。特别是当记录纸走纸速度降低时,测量信号的取样频率变得较低,以致很难监控被记录的数据。为了克服这种困难,只需要在微处理机CPU的控制下,分别将由许多系统输出的测量信号在一预先确定的不依赖于记录纸走纸速度的频率下转换成数字信号,并加在伺服系统上就足够了。
图12示出了按照本发明的描笔式记录仪的另一实施例,此记录仪按照前面所述的方式工作。现在参考图12,记录笔P1-P3排列的方向与记录笔走纸的方向(由一箭头所示)相同,而P2和P3都相应同P1分开到预先确定的距离。压纸卷筒19a按预先确定的速度转动,此速度由微处理机CPU59通过装有一脉冲马达的记录纸走纸机构61进行设定。分别加到输入端Ti1-Ti2上的测量信号分别由前置放大器541-542放大,再分别加到A/D转换器571-572上被转换成数字信号。此时,根据由CPU59输出的通过光电耦合器或光电输入隔离器624的控制信号,A/D转换器571-572在一预先确定的不依赖于记录纸20走纸速度的频率下将模拟信号转换成数字信号。由A/D转换器571-572输出的输出数字信号,分别通过光电耦合器621-622,作为测量数据加到微处理机CPU59。结果,当记录纸20的走纸速度变慢时,数据转换数目增加,而当记录纸20的走纸速度增加时,数据转换的数目减少。在参考记录笔P1系统上的测量数据通过微处理机CPU59顺序地加到伺服系统SL1,因此记录笔P1进行了测量数据的实时记录。另一方面,在记录笔P2和P3上的测量数据则被加到微处理机CPU59,使得在记录纸20走纸走一次(一步)的期间,得到每个测量数据的最大值、最小值和平均值,并贮存在M2和M3中。根据由微处理机CPU59输出的独立于记录纸20的设定走纸速度的控制信号,在获得预先确定的时间延迟的规定时间内,一个或多个数据选择性地从存贮器M2和M3读出并加到伺服系统SL2和SL3上,以补偿相对于参考记录笔P1的相位差,并由记录笔P2和P3记录在记录纸20上。
图13用于说明在图12的方块图中所用存贮器M2和M3的内在原理。当记录笔之间在记录纸20的走纸方向上存在相当于n步的相位差时,采用如图13(a)所示的能够贮存数据的数字为n的环形缓冲器,并使输入指针IP和输出指针OP本身移动。每当记录纸20根据一个中断信号传送一步时,输入指针IP和输出指针OP就移动了。图13(b)表示数据在缓冲器中循环了一次,图13(c)表示数据在缓冲器中循环了两次。图13(d)表示在图13(c)中在时间点B缓冲器的内容。从图13(d)可以看出,当记录纸传送步的时限是(n+m)时,数据便在记录纸传送步的时限m被导出。即(n+m)-m=n,因此进行了n步的相位校正。
图14是一程序图,用以解释如图12所示的描笔式记录仪的操作方式。贮存在微处理机CPU59中一存贮器中的最新的最大值、最小值和平均值被送到存贮器M2和M3,使CPU59的存贮器被清除。下一预先确定的数据从存贮器M2和M3送到伺服系统SL2和SL3。对应于记录纸20的走纸速度,选择性地送出:(1)实时测量数据;(2)平均值;或(3)平均值-最小值-平均值-最大值-平均值。例如,假定A/D转换器571-572的转换频率是125毫秒,记录纸20的走纸分辨率是0.1毫米(0.05×2),则得到如图15所示的记录纸20的走纸速度X(毫米/小时)和测量数据的数目D之间的关系。在X≥2880时,测量数据成为0或1。为0时,测量数据在前一步便被送出去了,为1时,测量数据是实时发送。在576<X<2880时,测量数据是从1至5,因此发送测量数据的平均值。在288≤X≤587和X≤72时,测量数据大于5,因此按规定次序发送平均值-最小值-平均值-最大值-平均值。结果,记录了最大值和最小值之间的差值。
用上述结构,测量总是在预先确定的独立于记录纸20走纸速度的频率下进行。因此,即使记录纸20设定的走纸速度低,也和先有技术的描笔式记录仪相反,监控和操纵不会受到不利的影响,对应于测量信号量值的三条记录线由记录笔P1-P2在记录纸20上绘出,其间没有任何相位差。虽然至今只结合三笔式记录仪叙述了本发明,但是很清楚,本发明可以应用于双笔记录仪,或具有四笔以上的多笔式记录仪。
如上所述,按照本发明测量信号被转换成数字信号,并在微处理机CPU59的控制下加到伺服系统SL上。因此当超过有效记录宽度的测量信号被加到伺服系统SL时,则计算机进行控制,将加到伺服系统SL的测量信号的值固定到有效记录宽度内,用此方法可以避免记录笔滑架29的超限运动。
图16(a)示出了由图11所示类型的描笔式记录仪中记录笔滑架29的各种记录宽度和运动范围。A代表记录宽度(0-100%);B代表有效记录宽度(-1-101%);c代表记录笔滑架29的运动范围,而D代表可测量的全宽度。b1代表有效记录宽度的下限,而b2代表其上限。这些上限和下限都作为数字数据被贮存在一个存贮器中(图中未示出)。在记录笔滑架29的运动范围上的C1表示在0%上的一机械制动器,而C2代表在100%上的一机械制动器。图16(b)示出了描笔式记录仪伺服系统的信号关系。XI代表D/A转换器60的输出,而F则代表由电位器的控制电路31q输出的反馈信号。
图17是一程序图,用以说明如图11所示类型的,基于上述特点的描笔式记录仪的操作方式。测量信号由前置放大器54放大(规格化),并由A/D转换器57转换成数字信号,由A/D转换器57输出的数字输出信号加到微计算机CPU59,使其执行诸如线性化、定标以及其它类似的预先确定的算术运算。被处理后的信号转换成显示信号和记录信号。显示信号加到显示单元,显示其数值,而记录信号则加到D/A转换器60,被转换成模拟信号XI。微处理机CPU59将模拟信号X1同有效记录宽度B的下限b1和上限b2进行比较。在b1<X1<b2时,或如果加在伺服系统上的模拟信号是在有效宽度B以内,则模拟信号X1随测量信号X的量值而变化。模拟信号X1通过伺服放大器55加到马达M上,并同由电位计31输出的信号F进行比较。如果测量信号X如上所述在有效记录宽度B以内,则由记录笔滑架29携带的记录笔画出可见的测量信号量值的记录。如果b1>X1(标尺以下),微处理机CPU59则将加到伺服系统的模拟信号X1定到下限b1,而不管测量信号的量值。如果b2<X1(标尺以上),则微处理机CPU59将把加到伺服系统的模拟信号X1限定到上限b2。当加在伺服系统上的模拟信号X1被限定在下限b1或上限b2时,则伺服系统如图16(b)所示,在b1或b2达到平衡。结果,记录笔滑架29在尚未达到同在C1和C2放置的机械制动器接触之前便停止了。因此记录笔滑架29不会受到碰击。另外,伺服系统总是保持在平衡状态,所以马达M的热耗可以减小到最小,功率消耗也降低。
图18详细示出了如图4所示的打印机构CP的结构。在图4和图18中使用了同样的参考号。在图18中参考号63表示一滑架,记录笔支臂64的一端可绕一枢轴65转动式地安装在此滑架上,此滑架还可滑动式地由一主轴66和一辅助轴67支承。主轴66和辅助轴67牢固地固定到侧板68和69上,并相互平行。侧板68的一端,或其下端被成形为一扇形齿轮,同由马达70输出轴上所带的齿轮71互相啮合,使得马达70转动时,引起侧板68绕主轴66转动。参考号73表示一驱动板,用于使记录笔支臂64在垂直方向移动,它可转动式地固定到主体的一侧板(图中未示出)。驱动板73通过连接杆74连接到一螺线管线圈75上的柱塞76上,使驱动板73可以转动。参考号77表示一驱动弦线,用以移动滑架63,该弦线绕在由马达78驱动的驱动轮79和两个被驱动轮80和81上。此驱动弦线77牢固地系在滑架63上。
操作时,在由一箭头所示的预定方向上,记录纸20以在5毫米/小时至12000毫米/小时范围内的某适当速度连续地被传送。测量信号的量值以模拟的方式由记录笔P1-P3记录在记录纸20上。而记录笔PO则将诸如记录纸的走纸速度、日期、时间、报警信号、时标等记录在记录纸20上。
由记录笔Po打印时,为响应打印信号,记录笔Po必须在记录纸20走纸的方向、在垂直于记录纸20走纸方向的方向和在与记录纸20的纸面垂直的方向移动。为了使记录笔Po在记录纸20的走纸方向进行运动,使马达70通电,致使记录笔的支臂64相对于压纸卷筒19a进行向前或后退的运动。为使记录笔Po在垂直于记录纸20走纸方向的方向进行运动,马达78通电,使驱动弦线77带动滑架63进行运动。为使记录笔Po在与记录纸20的纸面垂直的方向进行运动,螺线管线圈选择性地通电,使驱动板73转动,因而记录笔的支臂64被移动。
因此,当记录纸20被连续地传送时,在记录纸20上便打印出了预定的打印事项,根据记录纸20的走纸速度,打印的字行是倾斜的。例如,假如沿一行打印20个字符,打印速度是每秒两个字符,则打印一行需要10秒。如果对记录事项倾斜的限制规定为对于100毫米是2毫米,则记录纸20走纸速度的极限便是2毫米/10秒=720毫米/小时。对于能够将记录纸20的走纸速度设定在5毫米/小时至12000毫米/小时范围内的描笔式记录仪,则走纸速度仅在5毫米/小时至720毫米/小时的范围内时,才能在允许的倾斜范围内进行打印。在本实施例中,马达70和78是具有同样特性的脉冲马达,能够以大约5厘米/秒的速度进行打印,分辨率为0.2毫米。为此,马达70和78必须分别复位到它们开始的位置。为此目的,可以安装机械制动器,并在一预定的期间内加上驱动脉冲,以使脉冲马达解调,随后使它们复位。另一种办法是安装开关,使其响应接触信号让脉冲马达复位。另外,也可以将一编码器直接连接到每个脉冲马达,使其可以确定脉冲马达开始的位置。因为只在进行打印操作时,马达70和78才通电,所以功率消耗可以减到最小,描笔式记录仪中的温升也受到了抑制。
上面叙述了包含磁致伸缩线的电位计,但是应当清楚,也可以采用任何其它合适的电位计,如采用电导塑料电位计。
应用磁致伸缩电位计时,驱动线圈和输出变压器可安装在记录笔滑架上,而磁致伸缩线则装上检测线圈。电源连接到磁致伸缩线的端点,用此方法可以得到一无线电位计,此时可以去掉如图6所示的柔软的印刷电路板36。
如上所述,按照本发明可以得到高的装配密度,使得按照本发明制作的描笔式记录仪体积紧凑、操作可靠、制作成本低,并且容易维修和操作。此外,本发明可以同样地应用于多笔式记录仪中。
Claims (10)
1、一种自动平衡式描笔记录仪,其中,自动平衡机构响应测量信号的量值使记录笔滑架在垂直于记录纸走纸方向的方向上运动,描笔式记录仪的特征在于,上述记录笔滑架和上述平衡机构被合并到一共同的印刷电路板上,以构成一整体的伺服单元。
2、根据权利要求1所述的描笔式记录仪,其特征在于,构成上述伺服单元的伺服马达是扁平形的无刷直流马达,此马达具有一圆片形的永久磁铁转子和许多电枢线圈,在圆片形永久磁铁转子上的磁中性点和靠近其上磁极的部分被制作得薄一些,电枢线圈在圆周的方向上彼此间隔一预先确定的角度。
3、根据权利要求1所述的描笔式记录仪,其特征在于,构成上述伺服单元的电位计是一磁致伸缩电位计,此磁致伸缩电位计包含一薄片状的磁致伸缩线,此磁致伸缩线平躺在平行于上述记录笔滑架运动的方向上。
4、根据权利要求1所述的描笔式记录仪,其特征在于,上面绕着驱动弦线并驱使上述记录笔滑架进行往复运动的驱动轮,在内部车有齿轮齿,用以传送伺服马达的转动。
5、根据权利要求1所述的描笔式记录仪,其特征在于,已经转换成数字信号的测量信号在微处理机控制下被加到伺服系统。
6、根据权利要求4所述的描笔式记录仪,其特征在于,当超过有效记录宽度的测量信号被加到伺服系统时,加到伺服系统上的测量信号值在微处理计算机的控制下被限制在上述有效记录宽度的量值范围内。
7、根据权利要求1所述的描笔式记录仪,其特征在于,另外包含了一条状图形显示装置,用以以条状图形的形式显示由上述伺服单元记录的测量信号的量值。
8、根据权利要求1所述的描笔式记录仪,其特征在于,许多测量信号的量值由许多伺服单元以模拟的方式,并以不同的颜色进行记录;由条状图形显示装置以条形图的方式显示由每一伺服单元记录的每一测量信号的量值,显示的颜色与上述每一个测量信号的上述记录量值的颜色一致。
9、根据权利要求1所述的描笔式记录仪,其特征在于,来自许多系统的测量信号的量值,在一独立于记录纸走纸速度的预先确定的频率下被转换成数字信号,然后在微计算机的控制下加到相应的伺服系统,并被记录,使对应于相应伺服系统记录笔之间的间距或距离的时间差得到校正。
10、根据权利要求1所述的描笔式记录仪,其特征在于,还包括了具有一记录笔的打印机构,该记录笔响应打印信号,自身在记录纸走纸的方向,在垂直于上述记录纸走纸方向的方向和在垂直于上述记录的方向移动,用此方法在上述的记录纸上记录预先确定的事项。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP60250114A JPS62110117A (ja) | 1985-11-08 | 1985-11-08 | ペンレコ−ダ |
| JP250114/85 | 1985-11-08 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN86102080A CN86102080A (zh) | 1987-05-13 |
| CN1003468B true CN1003468B (zh) | 1989-03-01 |
Family
ID=17203034
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN86102080.4A Expired CN1003468B (zh) | 1985-11-08 | 1986-03-28 | 描笔式记录仪 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US4649399A (zh) |
| JP (1) | JPS62110117A (zh) |
| KR (1) | KR900008296B1 (zh) |
| CN (1) | CN1003468B (zh) |
| BR (1) | BR8600947A (zh) |
| DE (1) | DE3607249A1 (zh) |
| GB (1) | GB2182774B (zh) |
| NL (1) | NL193074C (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100368208C (zh) * | 2001-12-21 | 2008-02-13 | 比克公司 | 用于测试书写工具的方法 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05367Y2 (zh) * | 1986-05-16 | 1993-01-07 | ||
| US4930090A (en) * | 1988-01-14 | 1990-05-29 | Yokogawa Electric Corporation | Pen recorder moved according to a digital servo controller |
| US5450104A (en) * | 1992-03-06 | 1995-09-12 | Fuji Electric Co., Ltd. | Ink jet recording apparatus |
| DE19541130A1 (de) | 1995-10-27 | 1997-04-30 | Hartmann & Braun Ag | Verfahren zum Positionieren eines Schreibstiftes in einer Registriereinrichtung |
| DE19541132A1 (de) | 1995-10-27 | 1997-04-30 | Hartmann & Braun Ag | Anordnung zum Positionieren eines Schreibstiftes in einer Registriereinrichtung |
| DE19806118A1 (de) * | 1998-02-14 | 1999-08-19 | Bosch Gmbh Robert | Wellenantriebsvorrichtung |
| CN118444212B (zh) * | 2024-07-08 | 2024-10-29 | 徐州鑫大电子科技有限公司 | 一种电力变压器的质量检测设备 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1308297A (fr) * | 1961-12-18 | 1962-11-03 | Simmonds Precision Products | Procédé et dispositif d'enregistrement continu et temporaire d'une variable |
| DE2040266A1 (de) * | 1970-08-13 | 1972-02-17 | Wetzer Geraetebau Kg | Digitaldrucker |
| US3787828A (en) * | 1971-04-14 | 1974-01-22 | Yokogawa Electric Works Ltd | Self-balancing instrument |
| US3754281A (en) * | 1972-01-17 | 1973-08-21 | Beckman Instruments Inc | Rectilinear stylus system for chart recorder |
| GB1438013A (en) * | 1973-08-30 | 1976-06-03 | Cardiac Recorders Ltd | Multi-channel recorders |
| DE2603680C3 (de) * | 1976-01-31 | 1978-09-28 | Philips Patentverwaltung Gmbh, 2000 Hamburg | Linearmotor, insbesondere für anzeigende und schreibende Meßgeräte |
| JPS52119342A (en) * | 1976-03-31 | 1977-10-06 | Yokogawa Hokushin Electric Corp | Automatic balancing recorder |
| JPS5328454A (en) * | 1976-08-27 | 1978-03-16 | Yokogawa Hokushin Electric Corp | Recording instrument |
| JPS5421757A (en) * | 1977-07-19 | 1979-02-19 | Yokogawa Hokushin Electric Corp | Recorder |
| US4249186A (en) * | 1977-08-24 | 1981-02-03 | Leeds & Northrup Limited | Processor system for display and/or recording of information |
| JPS5825210B2 (ja) * | 1977-11-14 | 1983-05-26 | 横河電機株式会社 | 指示記録計 |
| GB1569643A (en) * | 1978-01-06 | 1980-06-18 | Yokogawa Electric Works Ltd | Recorder having modular construction |
| FR2422145A1 (fr) * | 1978-04-03 | 1979-11-02 | Enertec | Enregistreur avec indication de la grandeur en cours d'enregistrement |
| JPS55151216A (en) * | 1979-05-14 | 1980-11-25 | Advantest Corp | Multipoint data recorder |
| DE2923537A1 (de) * | 1979-06-09 | 1980-12-18 | Joens Mess Und Regeltechnik Gm | Messwertschreiber |
| AT381589B (de) * | 1979-08-13 | 1986-11-10 | Goerz Electro Gmbh | Schreiber zur registrierung analoger messwerte |
| JPS5681072A (en) * | 1979-12-06 | 1981-07-02 | Matsushita Electric Ind Co Ltd | Brushless dc motor |
| JPS5745685A (en) * | 1980-08-30 | 1982-03-15 | Sony Corp | Position detector |
| US4433338A (en) * | 1981-03-31 | 1984-02-21 | Yokogawa Hokushin Electric Corporation | Multiple-color recording apparatus |
| US4453168A (en) * | 1982-07-22 | 1984-06-05 | Lafayette Instrument Co., Inc. | Rectilinear pen movement apparatus for recording galvanic skin resistance |
| DE3340276A1 (de) * | 1983-11-08 | 1985-05-15 | EME Entwicklungsgesellschaft für Mikroelektronik mbH, 4000 Düsseldorf | Messwertschreiber |
-
1985
- 1985-11-08 JP JP60250114A patent/JPS62110117A/ja active Granted
-
1986
- 1986-02-27 GB GB8604839A patent/GB2182774B/en not_active Expired
- 1986-03-03 US US06/835,166 patent/US4649399A/en not_active Expired - Lifetime
- 1986-03-05 DE DE19863607249 patent/DE3607249A1/de active Granted
- 1986-03-05 BR BR8600947A patent/BR8600947A/pt not_active IP Right Cessation
- 1986-03-14 NL NL8600667A patent/NL193074C/nl not_active IP Right Cessation
- 1986-03-19 KR KR1019860002010A patent/KR900008296B1/ko not_active IP Right Cessation
- 1986-03-28 CN CN86102080.4A patent/CN1003468B/zh not_active Expired
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100368208C (zh) * | 2001-12-21 | 2008-02-13 | 比克公司 | 用于测试书写工具的方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE3607249A1 (de) | 1987-05-14 |
| KR900008296B1 (ko) | 1990-11-12 |
| NL8600667A (nl) | 1987-06-01 |
| NL193074B (nl) | 1998-05-06 |
| GB2182774B (en) | 1989-10-04 |
| GB8604839D0 (en) | 1986-04-03 |
| KR870005329A (ko) | 1987-06-08 |
| DE3607249C2 (zh) | 1990-06-13 |
| JPH0528765B2 (zh) | 1993-04-27 |
| CN86102080A (zh) | 1987-05-13 |
| NL193074C (nl) | 1998-09-08 |
| BR8600947A (pt) | 1987-06-30 |
| US4649399A (en) | 1987-03-10 |
| JPS62110117A (ja) | 1987-05-21 |
| GB2182774A (en) | 1987-05-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5912541A (en) | Integrated DC servo motor and controller | |
| CN1003468B (zh) | 描笔式记录仪 | |
| AU7170287A (en) | Printing machine with at least one printing unit | |
| ATE91344T1 (de) | Messanordnung umfassend zumindest einen linearen elektronischen laengenmesstaster. | |
| US5616917A (en) | Device for measuring an angle between pivotally-connected members | |
| US4034479A (en) | Instrument for measuring angles and for determining vehicle wheel alignment characteristics | |
| US4134062A (en) | Limited rotation instrument rebalance apparatus employing a wiper having vibration damping | |
| JPS61223529A (ja) | 無人搬送車性能計測用試験装置 | |
| JP2596264Y2 (ja) | 転てつ器の負荷トルク測定器 | |
| US4947697A (en) | System for measuring force versus position of a flight controller in an aircraft or flight simulator | |
| Maddock | Servo-operated recording instruments. A review of progress | |
| US4042938A (en) | Analog and digital data recorder | |
| JPH1015890A (ja) | スリッター等位置決め装置 | |
| JP2568478Y2 (ja) | ボールねじトルク自動測定装置 | |
| JPH0765909B2 (ja) | 計量値表示方法 | |
| GB2032108A (en) | Shaft aligner | |
| US4453168A (en) | Rectilinear pen movement apparatus for recording galvanic skin resistance | |
| US3161459A (en) | Automatic null-balancing electrical measuring recorders | |
| JPH0325892Y2 (zh) | ||
| SU823985A1 (ru) | Устройство дл измерени моментаТРЕНи | |
| JPS6292254A (ja) | 電気的な測定値伝送系を有する測定カセツト | |
| CN1083929A (zh) | 测量纸张灰份的仪器及其测量方法 | |
| JPS5826337Y2 (ja) | 自動平衡計器 | |
| JPH0138921B2 (zh) | ||
| JPS57131016A (en) | Testing method for precision of recorder |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C06 | Publication | ||
| PB01 | Publication | ||
| C13 | Decision | ||
| GR02 | Examined patent application | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CX01 | Expiry of patent term |