BR112016021674B1 - Método e sistema para avaliar o risco de mudança de pista de tráfego durante a condução de um veículo na frente em uma estrada com pelo menos duas pistas de tráfego vizinhas - Google Patents
Método e sistema para avaliar o risco de mudança de pista de tráfego durante a condução de um veículo na frente em uma estrada com pelo menos duas pistas de tráfego vizinhas Download PDFInfo
- Publication number
- BR112016021674B1 BR112016021674B1 BR112016021674-1A BR112016021674A BR112016021674B1 BR 112016021674 B1 BR112016021674 B1 BR 112016021674B1 BR 112016021674 A BR112016021674 A BR 112016021674A BR 112016021674 B1 BR112016021674 B1 BR 112016021674B1
- Authority
- BR
- Brazil
- Prior art keywords
- vehicle
- traffic
- neighboring
- lanes
- lane
- Prior art date
Links
- 230000008859 change Effects 0.000 title claims abstract description 35
- 238000000034 method Methods 0.000 title claims abstract description 34
- 238000006073 displacement reaction Methods 0.000 claims description 12
- 238000001514 detection method Methods 0.000 claims description 11
- 101001063878 Homo sapiens Leukemia-associated protein 1 Proteins 0.000 claims description 7
- 102100030893 Leukemia-associated protein 1 Human genes 0.000 claims description 7
- 238000013459 approach Methods 0.000 abstract description 6
- 238000012545 processing Methods 0.000 description 9
- 230000009471 action Effects 0.000 description 6
- 238000004590 computer program Methods 0.000 description 6
- 238000004891 communication Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 230000001052 transient effect Effects 0.000 description 3
- 230000006870 function Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- 238000012512 characterization method Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- 230000005693 optoelectronics Effects 0.000 description 1
- 230000002250 progressing effect Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/10—Path keeping
- B60W30/12—Lane keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/804—Relative longitudinal speed
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- Traffic Control Systems (AREA)
Abstract
MÉTODO E SISTEMA PARA AVALIAR O RISCO DE MUDANÇA DE PISTA DE TRÁFEGO DURANTE A CONDUÇÃO DE UM VEÍCULO NA FRENTE EM UMA ESTRADA COM PELO MENOS DUAS PISTAS DE TRÁFEGO VIZINHAS. A presente invenção se refere a um método para avaliar o risco de mudança de pista de tráfego durante a condução de um veículo na frente de uma estrada com pelo menos duas pistas de tráfego vizinhas compreendendo as etapas de: detectar(S1) a presença de veículos que estão se aproximando do veículo na frente por trás. O método compreende ainda as seguintes etapas: determinar, com base em especificações referentes à extensão de uma pista de tráfego especificada na qual o veículo na frente está sendo conduzido, a extensão da pelo menos uma pista de tráfego vizinha com base em posições de referência continuamente determinadas do veículo na frente em relação à dita pista de tráfego vizinha para determinar uma zona de risco que se estende uma extensão especificada na dita pista de tráfego para trás a partir do dito veículo na frente e tomar (S3) a presença de veículos que se aproximam do veículo na frente por trás na dita zona de risco como base para tomar (...).
Description
[0001] A invenção se refere a um método para avaliar o risco de mudança de pista de tráfego durante condução de um veículo na frente em uma estrada com pelo menos duas pistas de tráfego vizinhas de acordo com a introdução à reivindicação 1. A invenção se refere a um sistema para avaliar o risco da mudança de pista de tráfego durante condução de um veículo na frente de uma estrada com pelo menos duas pistas de tráfego vizinhas. A invenção se refere também a um veículo a motor. A invenção também se refere a um programa de computador e um produto de programa de computador.
[0002] Quando se conduz um veículo em uma estrada com pelo menos duas pistas de tráfego vizinhas, uma mudança de pista de tráfego envolve um risco no caso no qual um veículo atrás está se aproximando na pista de tráfego vizinha para a qual uma mudança deve ocorrer. A partir do ponto de vista de segurança de tráfego, assim, há uma necessidade de avaliar o risco de mudança de pista de trafégo na presença de veiculos que se aproximam do veículo na frente por trás.
[0003] Aquilo que é conhecido como um "Sistema de advertência de ponto- cego"’ é, de acordo com uma variante, usado para esta finalidade. Tal sistema adverte ou, de outro modo, toma medidas quando o próprio veículo do motorista está no processo de progredir para uma pista de tráfego vizinha na qual um veículo que se aproxima do próprio veículo do motorista por trás está presente ou estará presente em um futuro próximo. Isto é normalmente obtido por meio de um radar direcionado para trás que detecta veículos em pistas de tráfego vizinhas, onde se assume que o veículo na frente e o veículo que se aproxima dele por trás estão sendo conduzidos essencialmente para frente diretamente ao longo da direção de deslocamento.
[0004] A suposição de que o veículo da frente e o veículo que está se aproximando do veículo da frente por atrás em pistas de tráfego vizinhas serão conduzidos em linha reta para a frente pode levar a advertências errôneas ou omitidas.
[0005] Em estradas com várias pistas de tráfego, o grau de curvatura da estrada pode fazer com que tal sistema de advertência de ponto-cego tome medidas desnecessariamente quando um veículo se aproxima por trás e está localizado próximo do veículo da frente na direção lateral, mas mesmo assim está localizado mais de uma pista de tráfego de distância. A Figura 1a ilustra este problema. Da mesma forma, um veículo em uma estrada com várias pistas de tráfego que se aproxima de um veículo da frente por trás e que está localizado longe do veículo da frente na direção lateral pode constituir um perigo em uma curva interna, sem que o sistema registre o perigo. A Figura 1b ilustra este problema.
[0006] O documento US2003025597 descreve um sistema para fornecer assistência durante mudança de pista de tráfego, onde a posição das marcações de linha nas pistas de tráfego são memorizadas, pelo que o histórico da posição da pista de tráfego é determinado, de modo a determinar a posição do veículo.
[0007] Uma finalidade da presente invenção é obter um método e um sistema para avaliar o risco de mudança de pista de tráfego durante condução do veículo na frente em uma estrada com pelo menos duas pistas de tráfego vizinhas que minimiza o risco de advertências errôneas no qual o risco durante a mudança de pistas de tráfego não está presente e o risco de advertências omitidas quando o risco durante a mudança de pistas de tráfego está presente.
[0008] Estas e outras finalidades, as quais se tornam claras pela descrição abaixo, são obtidas por meio de um método, um sistema, um veículo a motor, um programa de computador e um produto de programa de computador do tipo descrito na introdução e que, além disso, demonstram as características distintivas especificadas na parte de caracterização das reivindicações de patente independentes anexas. Modalidades preferidas do método e do sistema são definidas nas reivindicações não independentes anexas.
[0009] De acordo com a invenção, estas finalidades são obtidas com um método para avaliar o risco de mudança de pista de tráfego durante condução do veículo na frente de uma estrada com pelo menos duas pistas de tráfego vizinhas compreendendo as etapas de: detectar a presença de veículos que estão se aproximando do veículo na frente por atrás, além de compreender as etapas de: determinar, com base nas especificações referentes à extensão de uma pista de tráfego especificada na qual o veículo na frente está sendo conduzido, a extensão de pelo menos uma pista de tráfego vizinha com base em posições de referência continuamente determinadas no veículo na frente em relação à dita pista de tráfego vizinha de modo a determinar uma zona de risco se estende uma extensão especificada na dita pista de tráfego vizinha para trás a partir do dito veículo na frente e tomando a presença de um veículo que está se aproximando do veículo na frente por atrás na dita zona como uma base para advertência contra a mudança de pista de tráfego. Ao determinar zonas de risco relevantes desta forma, o risco de advertências errôneas nas quais o risco durante a mudança de pista de tráfego não está presente, e o risco de advertências omitidas quando o risco durante a mudança de pista de tráfego está presente, são minimizados.
[0010] De acordo com uma modalidade do método, posições de referência são continuamente determinadas em intervalos predeterminados. A determinação eficiente e previsível da zona de risco, desta forma, se torna possível.
[0011] De acordo com uma modalidade do método, os intervalos são intervalos de extensão ao longo da direção de deslocamento do veículo. A determinação eficiente e previsível da zona de risco, desta forma, se torna possível, independentemente da velocidade do veículo.
[0012] De acordo com uma modalidade do método, os intervalos são intervalos de tempo. A determinação eficiente e previsível da zona de risco que é simples de obter, desta forma, se torna possível.
[0013] De acordo com uma modalidade, o método compreende a etapa de determinar a extensão da dita pista de tráfego vizinha com base em parâmetros em relação ao deslocamento do veículo da frente, parâmetros os quais incluem a taxa de mudança de ângulo de guinada e a velocidade do veículo da frente. Um modo eficiente para determinar correta e precisamente a zona de risco, deste modo, se torna possível, na qual a condução em torno da curva do veículo da frente e, consequentemente, a largura e a curvatura da pista de tráfego vizinha, são eficientemente recriadas na zona de risco.
[0014] De acordo com uma modalidade do método, a dita determinação de extensão das ditas pistas de tráfego vizinhas inclui determinação da distância em relação ao veículo na frente.
[0015] De acordo com uma modalidade do método, a extensão até a qual a dita zona de risco se estende para trás nas ditas pistas de tráfego vizinhas a partir do dito veículo na frente é ajustada exceder a faixa de detecção do dito veículo que se aproxima do veículo na frente por trás. Desta forma, é assegurado que medidas, tal como fornecer uma advertência, sejam tomadas no caso em que tal veículo detectado está localizado na zona de risco, logo que o veículo é detectado.
[0016] As modalidades do sistema demonstram vantagens correspondentes como modalidades correspondentes do método descrito acima.
[0017] A presente invenção será melhor compreendida com referência à descrição detalhada a seguir lida em conjunto com os desenhos anexos, onde os mesmos numerais de referência se referem às mesmas partes ao longo das diversas vistas e onde:
[0018] As Figuras 1a e 1b ilustram esquematicamente a condução do veículo na frente em uma estrada com pelo menos duas pistas de tráfego vizinhas, em que um veículo que se aproxima do veículo na frente por trás é detectado de acordo com a tecnologia do estado da técnica;
[0019] a Figura 2 ilustra esquematicamente um veículo a motor de acordo com uma modalidade da presente invenção;
[0020] a Figura 3 ilustra esquematicamente um diagrama de blocos de um sistema para avaliar o risco de mudança de pista de tráfego durante condução do veículo na frente em uma estrada com pelo menos duas pista de tráfegos vizinhas de acordo com a presente invenção;
[0021] a Figura 4 ilustra esquematicamente a condução de um veículo na frente em uma estrada com pelo menos duas pistas de tráfegos vizinhas, onde posições de referência em relação a pistas de tráfego que são vizinhas ao veículo foram determinadas;
[0022] as Figuras 5a e 5b ilustram esquematicamente a condução do veículo na frente em uma estrada com pelo menos duas pistas de tráfego vizinhas, onde um veículo que se aproxima do veículo na frente por trás são detectados de acordo com uma modalidade da presente invenção;
[0023] a Figura 6 ilustra esquematicamente um diagrama de blocos de um método para avaliar o risco de mudança de uma pista de tráfego durante condução de um veículo em uma estrada com pelo menos duas pistas de tráfego vizinhas de acordo com a presente invenção; e
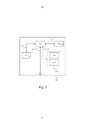
[0024] a Figura 7 ilustra esquematicamente um computador de acordo com uma modalidade da presente invenção.
[0025] As Figuras 1a e 1b ilustram esquematicamente a condução de um veículo na frente 1 em uma estrada R1, R2 com pelo menos duas pistas de tráfego vizinhas L1, L2, L3, onde veículos 2 que se aproximam do veículo na frente 1 por trás são detectados de acordo com tecnologia do estado da técnica.
[0026] Um veículo na frente 1 é conduzido, na Figura 1a, em uma estrada R1 com três pistas de tráfego L1, L2, L3, onde a estrada R1 tem curvas. O veículo 1 está se deslocamento na pista de tráfego mais interna L3. Um veículo 2 que se aproxima do veículo na frente 1 por trás é detectado através de um meio de radar com um determinado alcance, obtendo uma detecção da região A1 que é dirigida a partir da esquerda do veículo na frente e essencialmente diretamente para trás em relação à sua direção de deslocamento. O que é conhecido como um "sistema de advertência de ponto-cego", neste caso, assumirá que um veículo detectado em uma zona ZA1, a qual se estende diretamente para trás e em uma distância que corresponde à distância do veículo na frente para a pista de tráfego vizinha L2, constitui uma ameaça, pelo que uma advertência é ativada durante a mudança de pista de tráfego. O grau de curvatura da estrada, neste caso, fará com que o veículo 2 que se aproxima por trás e que está localizado na pista de tráfego mais externa L1 seja detectado e uma advertência seja ativada. O sistema de advertência de ponto- cego, neste caso, toma medidas desnecessariamente, uma vez que o veículo 2 que está se aproximando por trás está localizado próximo do veículo na frente 1 na direção lateral mas, mesmo assim, está localizado mais de uma pista de tráfego de distância.
[0027] Um veículo na frente 1 é conduzido, na Figura 1b, em uma estrada R1 com duas pistas de tráfego L1, L2, onde a estrada R1 tem curvas. O veículo 1 está se deslocamento na pista de tráfego mais externa L1. Um veículo 2 que se aproxima do veículo na frente por atrás é detectado através de um meio de radar com um determinado alcance, obtendo uma detecção da região A2 que é dirigida a partir da direita do veículo na frente e essencialmente diretamente em relação à sua direção de deslocamento. Aquilo que é conhecido como um "sistema de advertência de ponto-cego", neste caso, assumirá que um veículo detectado na região de detecção, mas determinado como não estando presente em uma zona ZA2 que se estende diretamente para trás e em uma distância que corresponde à distância entre o veículo na frente até a pista de tráfego vizinha L2, não constitui uma ameaça, pelo que nenhuma advertência é ativada. O grau de curvatura da estrada, neste caso, fará com que o veículo 2 que se aproxima por trás e que está localizado na pista de tráfego mais interna L1 não seja considerado como estando se aproximando de uma pista de tráfego vizinha. O sistema de advertência de ponto-cego, neste caso, não toma medidas quando o veículo 2 que está se aproximando por trás está localizado próximo do veículo na frente 1 em pistas de tráfego vizinhas, o qual constitui um perigo para o trânsito.
[0028] Neste documento o termo "link" se refere a um link de comunicação que pode ser uma linha física, tal como uma linha de comunicação opto-eletrônica, ou uma linha não física, tal como um link sem fios, por exemplo, um link de rádio ou link de micro-ondas.
[0029] Neste documento, o termo "pista de tráfego vizinha" se refere a pistas de tráfego vizinhas para veículos que se deslocam na mesma direção, isto é, pistas de tráfego na forma de pistas vizinhas nas quais os veículos se deslocam na mesma direção, comumente encontradas em estradas maiores, tais como autoestradas, e pistas de tráfego vizinhas para se deslocar na direção oposta, isto é, pistas de tráfego vizinhas nas quais o tráfego em sentido contrário está presente na pista de tráfego vizinha e nas quais manobras de ultrapassagem podem ocorrer.
[0030] Assim, no presente documento, o termo "estrada com pelo menos duas pistas de tráfego vizinhas" se refere a qualquer estrada apropriada com pistas de tráfego vizinhas de acordo com a definição acima. Assim, o termo "estrada com pelo menos duas pistas de tráfego vizinhas" pode, consequentemente, incluir uma estrada maior, tal como uma autoestrada, com duas ou mais pistas de tráfego vizinhas na forma de pistas vizinhas para se deslocar na mesma direção, uma estrada com duas pistas de tráfego vizinhas para se deslocar em direções opostas, isto é, pistas de tráfego vizinhas nas quais o tráfego em sentido contrário está presente na pista de tráfego vizinha e nas quais manobras de ultrapassagem podem ocorrer.
[0031] A Figura 2 ilustra esquematicamente um veículo a motor 1 de acordo com uma modalidade da presente invenção. O veículo 1 fornecido como um exemplo é constituído por uma veículo pesado na forma de um caminhão. Alternativamente, o veículo pode ser um ônibus ou um carro. O veículo compreende um sistema 1 para avaliar o risco de mudança de pista de tráfego durante condução do veículo na frente de uma estrada com pelo menos duas pistas de tráfego vizinhas de acordo com a presente invenção.
[0032] A Figura 3 ilustra esquematicamente um diagrama de blocos de um sistema 1 para avaliar o risco de mudança de pista de tráfego durante condução do veículo na frente de uma estrada com pelo menos duas pistas de tráfego vizinhas de acordo com uma modalidade da presente invenção.
[0033] O sistema 1 compreende uma unidade de controle eletrônica 100.
[0034] O sistema 1 compreende um meio 110 para detectar a presença de veículos que estão se aproximando do veículo na frente por atrás. O meio 110 para detectar a presença de veículos se aproximando por trás do veículo na frente pode incluir qualquer sensor adequado em geral.
[0035] O meio 110 para detectar a presença de veículos que estão se aproximando do veículo na frente por trás compreende, de acordo com uma variante, um meio de radar. O meio 110 para detectar a presença de veículos que estão se aproximando do veículo na frente por trás compreende, de acordo com uma variante, um meio de câmera. O meio 110 para detectar a presença de veículos que estão se aproximando do veículo na frente por trás compreende, de acordo com uma variante, um meio Lidar. O meio 110 para detectar a presença de veículos que estão se aproximando do veículo na frente por trás compreende, de acordo com uma variante, um meio de detecção a laser.
[0036] O meio 110 para detectar a presença de veículos que estão se aproximando por trás inclui um meio sensor para detecção em ambos os lados do veículo na frente, de modo a facilitar a detecção da presença de veículos que estão se aproximando do veículo na frente por trás em pistas de tráfego à direita do veículo e em pistas de tráfego à esquerda do veículo. O veículo na frente compreende um meio 110 para detectar a presença de veículos que se aproximam do veículo na frente por trás.
[0037] O meio 110 para detectar a presença de veículos que estão se aproximando do veículo na frente por trás compreende um meio determinar se o veículo que foi detectado se aproxima do veículo na frente, isto é, se o veículo que foi detectado tem uma velocidade relativa superior àquela do veículo na frente.
[0038] O sistema 1 compreende um meio 200a para determinar, com base em especificações relativas à extensão de uma pista de tráfego definida na qual o veículo na frente está sendo conduzido, a extensão de pelo menos uma pista de tráfego vizinha com base em posições de referência determinadas continuamente no veículo na frente em relação à dita pista de tráfego vizinha, de modo a determinar a extensão da zona de risco que se estende especificamente na dita pista de tráfego vizinha por trás a partir do veículo na frente.
[0039] O sistema 1, consequentemente, compreende um meio 200 para determinar uma zona de risco que se estende uma extensão determinada nas ditas pistas de tráfego vizinhas por trás a partir do veículo na frente. O meio 200 para determinar a zona de risco compreende o meio para determinar a extensão das ditas pistas de tráfego vizinhas.
[0040] O meio para determinar a extensão 200a das ditas pistas de tráfego vizinhas compreende um meio 210 para determinar posições de referência continuamente no veículo na frente em relação às pistas de tráfego vizinhas para a pista de tráfego do veículo na frente.
[0041] O sistema 1 compreende, neste caso, um meio 210 para determinar posições de referência continuamente do veículo na frente em relação às pistas de tráfego vizinhas do veículo na frente.
[0042] O meio 210 para determinar continuamente posições de referência do veículo na frente em relação às pistas de tráfego vizinhas compreende um meio 212 para determinar continuamente posições de referência em intervalos predeterminados.
[0043] De acordo com uma modalidade, os intervalos predeterminados são constituídos por intervalos de extensão. O meio 210 para determinar continuamente posições de referência do veículo na frente em relação às pistas de tráfego vizinhas compreende, consequentemente, de acordo com esta modalidade, um meio 212a para determinar continuamente posições de referência em intervalos de extensão predeterminados. Os intervalos de extensão são constituídos, de acordo com uma variante, de distâncias/extensões predeterminadas através das quais o veículo na frente tenha se deslocado, onde a distância/extensão é a mesma. O meio 210 para determinar a posição de referência é, neste caso, configurado para determinar continuamente a posição de referência após cada uma de tais distâncias/cada uma de tais extensões.
[0044] De acordo com uma modalidade, os intervalos predeterminados são constituídos por intervalos de tempo. O meio 210 para determinar continuamente posições de referência do veículo na frente em relação às pistas de tráfego vizinhas compreende, consequentemente, de acordo com esta modalidade, um meio 212b para determinar continuamente posições de referência nos intervalos de tempo predeterminados. Os intervalos de tempo são constituídos por intervalos de tempo predeterminados durante os quais o veículo na frente se deslocou, onde cada intervalo de tempo é o mesmo. O meio 210 para determinar a posição de referência é, neste caso, configurado para determinar continuamente a posição de referência após cada um de tais intervalos de tempo.
[0045] O meio 210 para determinar continuamente posições de referência do veículo na frente em relação às pistas de tráfego vizinhas compreende um meio 214 para determinar parâmetros em relação ao deslocamento do veículo na frente. Os parâmetros em relação ao deslocamento do veículo na frente incluem uma taxa de mudança de ângulo de guinada e a velocidade do veículo na frente.
[0046] O meio 210 para determinar a extensão nas ditas pistas de tráfego vizinhas compreende, consequentemente, um meio 214 para determinar parâmetros em relação ao deslocamento do veículo na frente, tais parâmetros incluindo a taxa de mudança de ângulo de guinada e a velocidade do veículo na frente.
[0047] A taxa de mudança de ângulo de guinada é, neste caso, usada como uma base para determinar se, e a extensão até a qual, a pista de tráfego na qual o veículo na frente está sendo conduzido faz uma curva, pelo que é feita a suposição de que as pistas de tráfego vizinhas têm curvaturas correspondentes.
[0048] O meio 214 para determinar parâmetros em relação ao deslocamento do veículo na frente compreende um meio 214a para determinar a taxa de mudança de ângulo de guinada do veículo na frente. O meio 214a para determinar a taxa de mudança do ângulo de guinada inclui pelo menos um giroscópio.
[0049] O meio 214 para determinar os parâmetros em relação ao deslocamento do veículo na frente compreende um meio 214b para determinar a velocidade do veículo na frente. O meio 214b para determinar a velocidade do veículo na frente compreende um medidor de velocidade no veículo.
[0050] O meio 210 para determinar continuamente posições de referência do veículo na frente em relação às pistas de tráfego vizinhas compreende, de acordo com uma variante, um meio de navegação 214c que inclui dados posicionais da posição atual do veículo, e dados de mapa que compreendem informação sobre o grau de curvatura da rota relevante. O meio 214 para determinar parâmetros em relação ao deslocamento do veículo na frente compreende o dito meio de navegação 214c.
[0051] O meio de navegação 214c pode ser usado como um suplemento para o meio 214a para determinar a taxa de mudança de ângulo de guinada para obter redundância. A determinação da taxa de mudança de ângulo de guinada de modo a determinar se a pista de tráfego faz uma curva pode ser influenciada por uma guinada do veículo na frente, onde a informação proveniente do meio de navegação 214c sobre o grau de curvatura da pista de tráfego pode ser usada para evitar avaliações errôneas com base em tal guinada. O meio de navegação 214c também pode ser usado como uma alternativa ao meio 214a para determinar a taxa de mudança de ângulo de guinada.
[0052] O meio 210a para determinar a extensão das ditas pistas de tráfego vizinhas compreende, consequentemente, de acordo com uma variante, um meio de navegação 214c que inclui dados posicionais da posição atual do veículo e dados de mapa que compreendem informação sobre o grau de curvatura da rota relevante.
[0053] O sistema 1 compreende um meio 214a para determinar a taxa de mudança de ângulo de guinada do veículo na frente.
[0054] O sistema 1 compreende um meio 214b para determinar a velocidade do veículo na frente.
[0055] O sistema 1 compreende o dito meio de navegação 214c.
[0056] O meio 210 para determinar continuamente posições de referência em relação ao veículo na frente para pistas de tráfego vizinhas compreende um meio 216 para determinar a distância relativa para o veículo na frente.
[0057] O meio 216 para determinar a distância relativa para o veículo na frente inclui um meio 216a para determinar marcações de linha de pistas de tráfego vizinhas. O meio 216a para determinar marcações de linha de pistas de tráfego vizinhas compreende um meio sensor, tal como um meio de câmera. O meio 216 para determinar a distância relativa para o veículo na frente inclui, de acordo com uma variante, um meio sensor. Os dito meio de sensor inclui, de acordo com uma variante, um meio de câmera.
[0058] O meio 216 para determinar a distância relativa para o veículo na frente compreende, de acordo com uma variante, um meio 216b para determinar marcações de linha virtuais de pistas de tráfego vizinhas.
[0059] O meio 216b para determinar marcações de linha virtuais de pistas de tráfego vizinhas inclui um meio para determinar a largura de pistas de tráfego nas quais o veículo na frente está se deslocando e/ou pistas de tráfego vizinhas.
[0060] O meio para determinar a largura de pistas de tráfego compreende, de acordo com uma variante, um meio de navegação que inclui dados de mapa com informações sobre a largura de pistas de tráfego da rota relevante, o tipo de rota e informação sobre a posição atual do veículo. O meio de navegação pode ser constituído pelo meio de navegação 214c.
[0061] O meio para determinar a largura de pistas de tráfego compreende, de acordo com uma variante, um meio sensor para determinar a largura da pista de tráfego na qual o veículo na frente está sendo conduzindo em que, de acordo com uma variante, é assumido que a largura da pista de tráfego vizinha é a mesma que a largura da pista de tráfego na qual o veículo na frente está sendo conduzido. O meio para determinar a largura de pistas de tráfego compreende, de acordo com uma variante, informação predeterminada armazenada em relação à largura de pistas de tráfego, informação a qual pode ser armazenada na unidade de controle eletrônica 100.
[0062] O sistema 1 compreende meios 100, 120 para obter a presença de um veículo que se aproxima do veículo na frente por trás a partir da dita zona de risco como uma base para tomar medidas durante uma mudança de pista de tráfego.
[0063] O sistema que compreende um meio 120 para efetuar medidas no caso de determinação da presença de um veículo que se aproxima do veículo da frente por trás a partir da dita zona de risco.
[0064] O meio 120 para a tomada de medidas compreende, de acordo com uma modalidade, o meio 122 para advertir contra uma mudança de pista de tráfego no caso em que tal presença é determinada. O meio 122 para advertir contra mudança de pista de tráfego pode ser constituído por qualquer meio de advertência adequado, tal como um meio de advertência visual, um meio de advertência sonoro e/ou um meio de advertência tátil. O meio de advertência visual inclui, de acordo com uma variante, uma unidade de exibição e/ou uma unidade de piscar ou equivalente. O meio de advertência sonoro inclui advertências na forma de mensagem de voz e/ou uma advertência na forma de um alarme sonoro. O meio de advertência tátil inclui uma influência sobre o volante do veículo na forma de vibração/movimento e/ou influência sobre o assento do veículo na forma de vibração e/ou influência sobre um pedal, tal como o pedal do acelerador ou pedal do freio.
[0065] O meio 120 para tomar medidas compreende, de acordo com uma modalidade, um meio 124 para evitar que o veículo na frente mude de pista de tráfego ou tornar mais difícil para que o veículo na frente mude de pista de tráfego no caso onde tal presença foi determinada. O meio 124 para evitar ou tornar mais difícil mudar de pista de tráfego inclui uma influência sobre o controle do veículo na frente, tal como uma mudança na posição do volante em direção à pista de tráfego vizinha na qual o risco está presente. O meio 120 para tomar medidas compreende, de acordo com uma variante, a unidade de controle eletrônica 100.
[0066] A unidade de controle eletrônica 100 está conectada de modo que ela troca sinais, através de um link, com o meio 110 para detectar a presença de veículos que se aproximam por trás do veículo na frente. A unidade de controle eletrônica está configurada de modo que ela recebe, através do link 11, um sinal proveniente meio 110 que representa dados de veículo sobre a presença de veículos que estão se aproximando do veículo na frente por trás.
[0067] A unidade de controle eletrônica 100 está conectada de modo que ela troca sinais, através de um link 20, com o meio 200 para determinar a extensão da zona de risco em pistas de tráfego vizinhas uma extensão especificada na retaguarda a partir do veículo na frente. A unidade de controle eletrônica 100 está configurada para receber um sinal, através do link 20, proveniente do meio 200 que representa dados da zona de risco para a zona de risco que foi determinada como se estendendo para trás a partir do veículo na frente em pistas de tráfego vizinhas.
[0068] A unidade de controle eletrônica 100 está conectada de modo que ela troca sinais, através do link 20a, com o meio 200a para determinar a extensão das ditas pistas de tráfego vizinhas. A unidade de controle eletrônica 100 está configurada para receber um sinal, através do link 20a, proveniente do meio 200a que representa dados de extensão para a extensão de pistas de tráfego vizinhas para determinação da zona de risco por trás a partir do veículo na frente.
[0069] A unidade de controle eletrônica 100 está conectada de modo que ela troca sinais, através do link 21, com o meio 210 para determinar continuamente posições de referência do veículo na frente em relação às pistas de tráfego vizinhas para a pista de trafego do veículo na frente. A unidade de controle eletrônica 100 está configurada para receber um sinal, através do link 21, proveniente do meio 210 que representa dados de posição de referência para posições de referência para determinar a extensão de pistas de tráfego vizinhas para determinação da zona de risco por trás do veículo na frente.
[0070] A unidade de controle eletrônica 100 está conectada de modo que ela troca sinais, através de um link 22, com o meio 212 para determinar continuamente posições de referência em intervalos predeterminados. A unidade de controle eletrônica 100 está configurada de modo a receber um sinal, através do link 22, proveniente do meio 212 que representa dados de posição de referência, de modo a determinar continuamente posições de referência em intervalos predeterminados, onde o intervalo pode ser um intervalo de extensão determinado através do meio 212a ou um intervalo de tempo determinado através do meio 212b. Neste caso, os dados de posição de referência para intervalos de extensão ou intervalos de tempo são recebidos através do link 22. De acordo com a variante que não é mostrada aqui, seria possível que a unidade de controle eletrônica 100 recebesse dados de posição de referência para intervalos de extensão provenientes do meio 212a através de um link e dados de posição de referência para intervalos de tempo provenientes do meio 212b através de um segundo link.
[0071] A unidade de controle eletrônica 100 está conectada de modo que ela troca sinais, através de um link 24a, com o meio 214a para determinar a taxa de mudança de ângulo de guinada do veículo na frente. A unidade de controle eletrônica 100 está configurada de modo a receber um sinal através do link 24a proveniente do meio 214a que representa dados da taxa de mudança do ângulo de guinada para determinação de qualquer curvatura que a pista de tráfego na qual o veículo na frente está sendo conduzido possa ter.
[0072] A unidade de controle eletrônica 100 está conectada de modo que ela troca sinais, através de um link 24b, com o meio 214b para determinar a velocidade do veículo na frente. A unidade de controle eletrônica 100 está configurada de modo a receber um sinal, através do link 24b, proveniente do meio 214b que representa dados de velocidade para a velocidade do veículo na frente.
[0073] A unidade de controle eletrônica 100 está conectada de modo que ela troca sinais, através de um link 24c, com o meio de navegação 214c. A unidade de controle eletrônica 100 está configurada de modo a receber um sinal, através do link 24c, proveniente do meio de navegação 214c que representa dados de mapa para a largura da pista de tráfego na qual o veículo na frente está sendo conduzido, incluindo qualquer curvatura da pista de tráfego que possa estar presente.
[0074] A unidade de controle eletrônica 100 está conectada de modo que ela troca sinais, através de um link 26a, com o meio 216a para determinar marcações de linha de pistas de tráfego vizinhas. A unidade de controle eletrônica 100 está configurada de modo a receber um sinal, através do link 26a, proveniente do meio 216a que representa dados de distância para a distância para linhas de marcação de pistas de tráfego vizinhas.
[0075] A unidade de controle eletrônica 100 está conectada de modo que ela troca sinais, através de um link 26b, com o meio 216b para determinar marcações de linha virtuais de pistas de tráfego vizinhas. A unidade de controle eletrônica 100 está configurada para receber um sinal, através do link 26b, proveniente do meio 216b que representa dados de distância para a distância de marcações de linha virtuais de pistas de tráfego vizinhas.
[0076] A unidade de controle eletrônica 100 está conectada de modo que ela troca sinais, através de um link 12, com o meio 120 para tomar medidas no caso de determinação da presença do veículo que está se aproximando veículo na frente por trás, na dita zona de risco. A unidade de controle eletrônica 100 está configurada de modo a transmitir, através do link 12, um sinal para o meio 120 que representa dados de ação que incluem dados de advertência sobre a advertência de uma mudança de pista de tráfego para o veículo na frente e/ou dados de impedimento, de modo a evitar ou tornar mais difícil uma mudança de pista de tráfego no veículo na frente.
[0077] A unidade de controle eletrônica 100 está configurada para processar os ditos dados de posição de referência, dados de taxa de mudança de ângulo de guinada, dados de velocidade e, onde relevante, dados de mapas, dados de distância para marcações de linha ou marcações de linha virtuais de modo a determinar dados de zona de risco para zonas de risco que se estendem em pistas de tráfego vizinhas por trás a partir do veículo na frente e comparar a zona de risco com os dados do dito veículo quanto à presença de veículos que estão se aproximando do veículo por trás, de modo a determinar se o veículo que está se aproximando do veículo na frente por trás está presente na dita zona de risco.
[0078] Se o veículo que se aproxima do veículo na frente por trás está presente na dita zona de risco, a unidade de controle está configurada para transmitir os dados de ação para o meio 120, incluindo dados de advertência para advertir contra uma mudança de pista de tráfego para o veículo na frente, e/ou dados de impedimento, de modo a evitar ou tornar mais difícil uma mudança de pista de tráfego no veículo na frente.
[0079] As posições de referência são determinadas através do meio 210 para determinar posições de referência continuamente. O meio 210 para determinar posições de referência continuamente é determinado, de acordo com uma modalidade, por meio das seguintes equações:
[0080] Dx(t) = Dx(t-ts) - cos (ts*u))*ts*v (1)
[0081] Dy(t) = Dy(t-ts) - sin (ts*u))*ts*v (2)
[0082] onde o eixo x se refere a valores positivos frontais na direção do veículo na frente e o eixo y se refere a valores positivos à esquerda na direção do veículo na frente.
[0083] As definições a seguir se aplicam às Equações (1) e (2) acima: D indica a distância [m] para a linha de marcação a partir de um ponto de referência no veículo na frente 1, onde tal ponto de referência no veículo na frente pode ser constituído, por exemplo, o ponto central do eixo traseiro, o ponto central do eixo dianteiro, o ponto central do eixo frontal do veículo ou equivalente, v indica a velocidade do veículo na frente [m/s], w indica a taxa de mudança de ângulo de guinada do veículo na frente (rad/s) e ts indica o tempo de amostragem para a atualização de posições de referência.
[0084] Durante a determinação contínua das posições de referência com intervalos predeterminados de extensão, uma nova posição de referência é criada regularmente após uma extensão predeterminada.
[0085] Durante a determinação contínua das posições de referência com intervalos de tempo predeterminados, uma nova posição de referência é criada regularmente após um tempo predeterminado.
[0086] A Figura 4 ilustra esquematicamente a condução do veículo na frente 1 em uma em uma pista de tráfego R1 com três pistas de tráfego vizinhas L1, L2, L3, onde posições de referência em relação a pistas de tráfego que são vizinhas ao veículo foram determinadas.
[0087] A Figura 4 ilustra, neste caso, uma lista de posições de referência DLA1, DLB1; DLA2, DLB2; DLA3, DLB3; DLA4, DLB4 determinadas por meio das Equações (1) e (2) acima. As posições de referência DLA1, DLB1; DLA2, DLB2; DLA3, DLB3; DLA4, DLB4 de acordo com a Figura 4 foram determinadas por meio de um sistema 1 de acordo com a presente invenção.
[0088] Um número N adequado de posições de referência DLA1, DLB1; DLA2, DLB2; DLA3, DLB3; DLA4, DLB4 na forma de pontos de referência DLA1, DLB1 ; DLA2, DLB2; DLA3, DLB3; DLA4, DLB4 é, neste caso, determinado. As distâncias para as marcações de linha M1, M2 são aqui determinadas para a marcação M2 imediatamente à esquerda do veículo na frente 1 e a próxima linha de marcação M1 à esquerda, isto é, as marcações de linha M1, M2 que definem a pista de tráfego L2 que é vizinha da pista de tráfego L3 na qual o veículo na frente 1 está se deslocando. Isto ocorre continuamente, pelo que as posições de referência mais antigas são substituídas quando o número N desejado de posições de referência foi determinado. As posições de referência DLA1, DLA2, DLA3 e DLA4 representam distâncias continuamente determinadas para as marcações de linha M2 imediatamente à esquerda do veículo na frente 1 e as posições de referência DLB1, DLB2, DLB3 e DLB4 distâncias para as marcações de linha M1 à esquerda das marcações de linha M2. A zona de risco neste caso é determinada continuamente por meios de posições de referência DLA1, DLB1; DLA2, DLB2; DLA3, DLB3; DLA4, DLB4, conforme mais evidente pela Figura 5a.
[0089] A Figura 5a ilustra esquematicamente a condução de um veículo na frente 1 na pista R1 na direção da seta P1 de acordo com a Figura 4, com três pistas de tráfego vizinhas L1, L2, L3, com base nas posições de referência que são continuamente determinadas.
[0090] A estrada R1 e o cenário correspondem àquilo ilustrado na Figura 1a com a correspondente detecção da região A1.
[0091] Uma zona de risco Z1 é determinada aqui com base em posições de referência determinadas continuamente. Por meio do sistema 1 de acordo com a presente invenção, é determinado que o veículo 2 que se aproxima do veículo na frente 1 por trás na direção da seta P2 e que foi detectado não está localizado na zona de risco Z1 que foi determinada, pelo que medidas são tomadas durante a mudança de pista de tráfego, em contraste com a tecnologia do estado da técnica, na qual uma advertência desnecessária ocorre durante a mudança de pista de tráfego.
[0092] A Figura 5b ilustra esquematicamente a condução de um veículo na frente 1 na direção da seta P1 em uma estrada R1 com duas pistas de tráfego vizinhas L1, L2. Quando um veículo 2 que se aproxima do veículo da frente por trás e que está sendo conduzido na direção da seta P2 é detectado de acordo com uma modalidade da presente invenção. A estrada R2 e o cenário correspondem àquilo ilustrado na Figura 1b, com a correspondente detecção da região A2. Uma zona de risco Z2 é determinada com base em posições de referência determinadas continuamente.
[0093] Por meio do sistema 1 de acordo com a presente invenção, é determinado que o veículo 2 está se aproximando do veículo na frente 1 por trás na direção da seta P2 e que foi detectado está localizado na zona de risco Z2 que foi determinada, pelo que são tomadas medidas durante a mudança da pista de tráfego, em contraste a tecnologia do estado da técnica, na qual nenhuma advertência é fornecida durante mudança da pista de tráfego.
[0094] Conforme se torna evidente nas Figuras 5a e 5b, a extensão Z1A, Z2a, pela a qual a dita zona de risco Z1, Z2 é configurada para se estender para trás na dita pista de tráfego vizinha L2 a partir do dito veículo na frente 1 é definida para ultrapassar o intervalo A1a, A2a para detecção do dito veículo 2 que se aproxima do veículo na frente 1 por trás.
[0095] A Figura 6 ilustra esquematicamente um diagrama de blocos de um método para avaliar o risco de mudança de pista de tráfego durante condução do veículo na frente em uma estrada com pelo menos duas pistas de tráfego vizinhas de acordo com uma modalidade da presente invenção.
[0096] De acordo com uma modalidade, o método para avaliar o risco de mudança de pista de tráfego durante condução do veículo na frente de uma estrada com pelo menos duas pistas de tráfego vizinhas compreende uma primeira etapa S1. A presença de veículos que estão se aproximando do veículo na frente por trás é detectada nesta etapa.
[0097] De acordo com uma modalidade, o método para avaliar o risco de mudança de pista de tráfego durante condução do veículo na frente de uma estrada com pelo menos duas pistas de tráfego vizinhas compreende uma segunda etapa S2. A extensão da pelo menos uma pista de tráfego vizinha é determinada nesta etapa com base em especificações referentes à extensão de uma pista de tráfego definida na qual o veículo da frente está sendo conduzido com base em posições de referência continuamente determinadas do veículo na frente em relação às ditas pistas de tráfego vizinhas para determinar uma zona de risco que se estende em uma extensão especificada na dita pista de tráfego vizinha para trás a partir do dito veículo na frente.
[0098] De acordo com uma modalidade, o método para avaliar o risco de mudança de pista de tráfego durante condução do veículo na frente em uma estrada com pelo menos duas pistas de tráfego vizinhas compreende uma terceira etapa S3. A presença de veículos que se aproximam do veículo na frente por trás a partir da dita zona de risco é, nesta etapa, tomada como uma base para advertência contra uma mudança de pista de tráfego.
[0099] Com referência à Figura 7, é mostrado um desenho de um design de uma configuração 500. A unidade de controle 100 que foi descrita com referência à Figura 3 pode compreender em uma execução da configuração 500. A configuração 500 compreende uma memória não transitória 520, uma unidade de processamento de dados 510 e uma memória de leitura/escrita 550. A memória não transitória 520 tem uma primeira seção de memória 530, na qual um programa de computador, tal como um sistema operacional, está armazenado, de modo a controlar a função da configuração 500. Além disso, a configuração 500 compreende um controlador de barramento, uma porta de comunicação serial, um meio I/O, um conversor A/D, uma unidade de entrada e transferência de data e hora, um contador de eventos e um controlador de interruptor (não mostrado no desenho). A memória não transitória 520 também tem uma segunda seção de memória 540.
[00100] É fornecido um programa de computador P que compreende rotinas para avaliar o risco de mudança de pista de tráfego durante condução do veículo na frente de uma estrada com pelo menos duas pistas de tráfego vizinhas de acordo com o método inovador. O programa P compreende rotinas para detectar a presença de veículos que estão se aproximando do veículo na frente por trás. O programa P compreende rotinas para determinar, com base em especificações referentes à extensão de uma pista de tráfego definida na qual o veículo na frente está sendo conduzido, a extensão de pelo menos uma pista de tráfego vizinha com base em posições de referência continuamente determinadas do veículo na frente em relação à dita pista de tráfego vizinha, para determinar uma zona de risco que se estende uma extensão especificada nas ditas pistas de tráfego vizinhas por trás a partir do dito veículo na frente. O programa P compreende rotinas para levar em consideração a presença de um veículo que se aproxima do veículo na frente por trás a partir da dita zona de risco como uma base para advertência contra uma mudança de pista de tráfego.
[00101] O programa P pode ser armazenado em um formato executável ou em um formato comprimido em uma memória 560 e/ou uma memória de leitura/escrita 550.
[00102] Quando é descrito que a unidade de processamento de dados 510 executa determinada função, deve ser entendido que a unidade de processamento de dados 510 realiza uma determinada parte do programa que está armazenado na memória 560 ou uma determinada parte do programa que está armazenado na memória de leitura/escrita 550.
[00103] A configuração de processamento de dados 510 pode se comunicar com uma porta de dados 599 através de um barramento de dados 515. A memória não transitória 520 se destina à comunicação com a unidade de processamento de dados 510 através de um barramento de dados 512. A memória separada 560 se destina à comunicação com a unidade de processamento de dados 510 através de um barramento de dados 511. A memória de leitura/escrita 550 está configurada de modo a se comunicar com a unidade de processamento de dados 510 através de um barramento de dados 514. Ligações associadas às unidades de controle 200; 300, por exemplo, podem estar conectadas à porta de dados 599.
[00104] Quando os dados são recebidos na porta de dados 599, eles são temporariamente armazenados na segunda seção de memória 540. Quando os dados que foram recebidos foram temporariamente armazenados, a unidade de processamento de dados 510 é preparada para execução de código da maneira descrita acima. Os sinais que foram recebidos na porta de dados 599 podem ser usados pela configuração 500 para detectar a presença de veículos que estão se aproximando do veículo na frente por atrás. Os sinais recebidos na porta de dados 599 podem ser usados pela configuração 500 para determinar, com base em especificações referentes à extensão de uma pista de tráfego definida na qual o veículo na frente está sendo conduzido, a extensão de pelo menos uma pista de tráfego vizinha com base em posições de referência continuamente determinadas do veículo na frente em relação à dita pista de tráfego vizinha, para determinar uma zona de risco se estende uma extensão especificada nas ditas pistas de tráfego vizinhas por trás a partir do dito veículo na frente. Os sinais que foram recebidos na porta de dados 599 podem ser usados pela configuração 500 para tomar a presença de veículos que se aproximam do veículo da frente por trás a partir da dita zona de risco como uma base para advertência contra uma mudança de pista de tráfego.
[00105] Partes dos métodos descritos aqui podem ser realizadas pela configuração 500 com o auxílio da unidade de processamento de dados 510, a qual executa o programa armazenado na memória 560 ou na memória de leitura/escrita 550. Quando a configuração 500 executa o programa, o método descrito aqui é executado.
[00106] A descrição acima das modalidades preferidas da presente invenção foram fornecidas para fins de ilustração e descrição. Não se pretende que ela seja exaustiva ou limite a invenção às variantes que foram descritas. Muitas modificações e variações serão óbvias para aqueles versados na técnica. As modalidades foram selecionadas e descritas de modo a descrever melhor os princípios da invenção e suas aplicações práticas e, assim, tornar possível que aqueles versados na técnica compreendam a invenção para várias modalidades e com as várias modificações que são apropriadas para o uso pretendido.
Claims (15)
1. Método para avaliar o risco de mudança de pista de tráfego durante a condução de um veículo na frente (1) em uma estrada (R1, R2) com pelo menos duas pistas de tráfego vizinhas (L1, L2, L3), compreendendo a etapa de: detectar (S1) a presença de veículos (2) que se aproximam do veículo na frente (1) por trás, caracterizado pelo fato de que compreende as etapas de: determinar (S2), com base em especificações referentes à extensão de uma pista de tráfego especificada na qual o veículo na frente (1) está sendo conduzido, a extensão de pelo menos uma pista de tráfego vizinha com base em posições de referência continuamente determinadas (DLAI, DLBI; DLA2, DLB2 DLA3, DLB3; DLA4, DLB4) do veículo na frente em relação à dita pista de tráfego vizinha para determinar uma zona de risco (Z1, Z2) que se estende uma extensão especificada na dita pista de tráfego vizinha por trás a partir do dito veículo na frente (1).
2. Método, de acordo com a reivindicação 1, caracterizado pelo fato de que as posições de referência (DLA1, DLB1; DLA2, DLB2; DLA3, DLB3; DLA4, DLB4) são continuamente determinadas em intervalos predeterminados .
3. Método, de acordo com a reivindicação 2, caracterizado pelo fato de que os intervalos são intervalos de extensão ao longo da direção de deslocamento do veículo.
4. Método, de acordo com a reivindicação 2, caracterizado pelo fato de que os intervalos são intervalos de tempo.
5. Método, de acordo com qualquer uma das reivindicações 1-4, caracterizado pelo fato de que compreende a etapa para determinar a extensão das ditas pistas de tráfego vizinhas com base em parâmetros referentes ao deslocamento do veículo na frente (1), parâmetros os quais incluem a taxa de mudança de ângulo de guinada e a velocidade do veículo na frente.
6. Método, de acordo com a reivindicação 5, caracterizado pelo fato de que a dita determinação de extensão das ditas pistas de tráfego vizinhas inclui determinação da distância à pista de tráfego vizinha em relação ao veículo na frente.
7. Método, de acordo com qualquer uma das reivindicações 1-6, caracterizado pelo fato de que a extensão (Z1a, Z2a) através da qual a dita zona de risco (Z1, Z2) se estende por trás na dita pista de tráfego vizinha (L2) do dito veículo na frente (1) é definida para exceder uma faixa (A1a, A2a) de detecção do dito veículo que se aproxima do veículo na frente (1) por trás.
8. Sistema para avaliar o risco de mudança de pista de tráfego durante condução de um veículo na frente (1) em uma estrada (R1, R2) com pelo menos duas pistas de tráfego vizinhas (L1, L2, L3), compreendendo um meio (110) para detectar a presença de veículos que se aproximam do veículo na frente por trás, caracterizado pelo fato de que compreende um meio (200) para determinar uma zona de risco (Z1, Z2) que se estende em uma extensão especificada nas ditas pistas de tráfego vizinhas por trás a partir do dito veículo na frente, um meio (200a) para determinar, com base em especificações referentes à extensão de uma pista de tráfego definida na qual o veículo na frente está sendo conduzido, a extensão da pelo menos uma pista de tráfego vizinha, incluindo um meio (210) para determinar continuamente posições de referência (DLAI, DLBI; DLA2, DLB2; DLA3, DLB3; DLA4, DLB4) do veículo na frente em relação à dita pista de tráfego vizinha para determinação da dita zona de risco (Z1, Z2).
9. Sistema, de acordo com a reivindicação 8, caracterizado pelo fato de que o meio (210) para determinar as posições de referência (DLAI, DLBI; DLA2, DLB2; DLA3, DLB3; DLA4, DLB4) compreende um meio (212) para determinar continuamente posições de referência (DLAI, DLBI; DLA2, DLB2; DLA3, DLB3; DLA4, DLB4) em intervalos predeterminados.
10. Sistema, de acordo com a reivindicação 9, caracterizado pelo fato de que os intervalos são intervalos de extensão ao longo da direção de deslocamento do veículo.
11. Sistema, de acordo com a reivindicação 9, caracterizado pelo fato de que os intervalos são intervalos de tempo.
12. Sistema, de acordo com qualquer uma das reivindicações 8-11, caracterizado pelo fato de que compreende meios (200a, 214) para determinar a extensão das ditas pistas de tráfego vizinhas com base em parâmetros referentes ao deslocamento do veículo na frente, parâmetros os quais incluem a taxa de mudança de ângulo de guinada e a velocidade do veículo na frente.
13. Sistema, de acordo com a reivindicação 12, caracterizado pelo fato de que os ditos meios (200a) para determinação de extensão das ditas pistas de tráfego vizinhas inclui meios para determinação da distância da pista de tráfego vizinha em relação ao veículo na frente.
14. Sistema, de acordo com qualquer uma das reivindicações 8-13, caracterizado pelo fato de que a extensão (Z1a, Z2a) através da qual a dita zona de risco (Z1, Z2) se estende por trás na dita pista de tráfego vizinha (L2) a partir do dito veículo na frente (1) é definida para exceder uma faixa (A1a, A2a) de detecção do dito veículo que se aproxima do veículo na frente (1) por trás.
15. Veículo a motor caracterizado pelo fato de que compreende um sistema (1) como definido em qualquer uma das reivindicações 8-14.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SE1450387A SE540272C2 (sv) | 2014-04-01 | 2014-04-01 | Förfarande och system för att riskbedöma körfältsbyte vid framförande av ett ledande fordon på en vägbana med åtminstonetvå angränsande körfält |
| SE1450387-4 | 2014-04-01 | ||
| PCT/SE2015/050346 WO2015152794A1 (en) | 2014-04-01 | 2015-03-23 | Method and system to assess the risk of change of traffic lane during the driving of a leading vehicle on a roadway with at least two neighbouring traffic lanes method and system to assess the risk of change of traffic lane during the driving of a leading vehicle on a roadway with at least two neighbouring traffic lanes |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BR112016021674A2 BR112016021674A2 (pt) | 2017-08-15 |
| BR112016021674B1 true BR112016021674B1 (pt) | 2022-11-29 |
Family
ID=54240949
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BR112016021674-1A BR112016021674B1 (pt) | 2014-04-01 | 2015-03-23 | Método e sistema para avaliar o risco de mudança de pista de tráfego durante a condução de um veículo na frente em uma estrada com pelo menos duas pistas de tráfego vizinhas |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP3127104A4 (pt) |
| KR (2) | KR20160134830A (pt) |
| BR (1) | BR112016021674B1 (pt) |
| SE (1) | SE540272C2 (pt) |
| WO (1) | WO2015152794A1 (pt) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| BR112018014753A2 (pt) * | 2016-01-22 | 2018-12-11 | Nissan Motor Co., Ltd. | método e dispositivo de assistência à condução |
| DE102016212727A1 (de) * | 2016-07-13 | 2018-01-18 | Conti Temic Microelectronic Gmbh | Vorrichtung und Verfahren zum Anpassen von Bereichen für das Warnen eines Fahrers |
| DE102016224061A1 (de) * | 2016-12-02 | 2018-06-07 | Bayerische Motoren Werke Aktiengesellschaft | Spurwechselassistenzsystem mit relativgeschwindigkeitsabhängigem Reaktionsbereich |
| JP7047482B2 (ja) * | 2018-03-09 | 2022-04-05 | 株式会社Jvcケンウッド | 測長システム、車両連結システム、測長方法、およびプログラム |
| JP6984547B2 (ja) * | 2018-06-08 | 2021-12-22 | トヨタ自動車株式会社 | 車線変更支援システム、車線変更支援装置及び車線変更支援方法 |
| CN112232581B (zh) * | 2020-10-26 | 2024-04-12 | 腾讯科技(深圳)有限公司 | 驾驶风险的预测方法、装置、电子设备及存储介质 |
| CN113335272B (zh) * | 2021-05-14 | 2023-04-25 | 江铃汽车股份有限公司 | 辅助驾驶方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19921449C1 (de) * | 1999-05-08 | 2001-01-25 | Daimler Chrysler Ag | Leithilfe bei einem Fahrspurwechsel eines Kraftfahrzeuges |
| ES2158827B1 (es) * | 2000-02-18 | 2002-03-16 | Fico Mirrors Sa | Dispositivo de deteccion de presencia de objetos. |
| JP4108706B2 (ja) * | 2005-10-31 | 2008-06-25 | 三菱電機株式会社 | 車線逸脱防止装置 |
| JP4950494B2 (ja) * | 2006-01-17 | 2012-06-13 | アルパイン株式会社 | 走行車線推定装置及び走行車線推定方法 |
| US7388475B2 (en) * | 2006-01-19 | 2008-06-17 | Gm Global Technology Operations, Inc. | Lane departure warning and avoidance system with warning modification criteria |
| ES2344880B1 (es) * | 2008-12-18 | 2011-06-28 | Cion De Galicia Fundacion Para La Promocion De Innovacion, Investigacion Y Desarrollo Tecnolog. En La Ind. De Automo | Sistema y metodo de asistencia al cambio de carril con zona de evaluacion adaptativa. |
| JP5407952B2 (ja) * | 2009-06-18 | 2014-02-05 | 日産自動車株式会社 | 車両運転支援装置及び車両運転支援方法 |
| WO2012147187A1 (ja) * | 2011-04-27 | 2012-11-01 | トヨタ自動車株式会社 | 周辺車両検出装置 |
| EP2741270B1 (en) * | 2011-08-02 | 2020-11-25 | Nissan Motor Co., Ltd. | Driving assistance apparatus and driving assistance method |
-
2014
- 2014-04-01 SE SE1450387A patent/SE540272C2/sv unknown
-
2015
- 2015-03-23 KR KR1020167029242A patent/KR20160134830A/ko active Search and Examination
- 2015-03-23 KR KR1020187033123A patent/KR102050526B1/ko active IP Right Grant
- 2015-03-23 BR BR112016021674-1A patent/BR112016021674B1/pt active IP Right Grant
- 2015-03-23 WO PCT/SE2015/050346 patent/WO2015152794A1/en active Application Filing
- 2015-03-23 EP EP15773978.0A patent/EP3127104A4/en not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| SE540272C2 (sv) | 2018-05-22 |
| BR112016021674A2 (pt) | 2017-08-15 |
| KR20160134830A (ko) | 2016-11-23 |
| EP3127104A4 (en) | 2017-11-22 |
| KR102050526B1 (ko) | 2019-11-29 |
| EP3127104A1 (en) | 2017-02-08 |
| SE1450387A1 (sv) | 2015-10-02 |
| KR20180125620A (ko) | 2018-11-23 |
| WO2015152794A1 (en) | 2015-10-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BR112016021674B1 (pt) | Método e sistema para avaliar o risco de mudança de pista de tráfego durante a condução de um veículo na frente em uma estrada com pelo menos duas pistas de tráfego vizinhas | |
| JP6684714B2 (ja) | 車両の運転者支援のための方法及びシステム | |
| JP5007840B2 (ja) | 運転支援装置 | |
| JP3912416B2 (ja) | 車両逸脱防止制御装置 | |
| EP3293488A2 (en) | System and method of simulataneously generating a multiple lane map and localizing a vehicle in the generated map | |
| JP6254690B2 (ja) | 自動車のための運転者アシストシステムで真の障害物と見かけの障害物との間の区別をする方法 | |
| CN110865374A (zh) | 定位系统 | |
| US20140354454A1 (en) | detecting travel of a vehicle in an impermissible driving direction | |
| JP2019091412A5 (pt) | ||
| GB2485873A (en) | A method of evading an approaching motor vehicle in same lane | |
| JP6593695B2 (ja) | 車線変更操舵制御システム | |
| JP6658235B2 (ja) | 車線維持装置 | |
| BRPI1104197A2 (pt) | sistema de seguranÇa e mÉtodo | |
| JP4876147B2 (ja) | 車線判定装置及びナビゲーションシステム | |
| KR20180028471A (ko) | 차선 표시 장치 및 차선 표시 방법 | |
| JP2011233151A (ja) | 運転支援装置 | |
| JP6492920B2 (ja) | 経路情報提供装置及び経路情報提供方法 | |
| BR112016021671B1 (pt) | Método e sistema para avaliar o risco de mudança de pista de tráfego durante a condução de um veículo em uma estrada e veículo motor compreendendo tal sistema | |
| JP4976998B2 (ja) | 車両の走行安全装置 | |
| BR112016021681B1 (pt) | Método e sistema para avaliar o risco de mudança de pista de tráfego durante a condução de um veículo em uma estrada e veículo motor compreendendo tal sistema | |
| JP6838391B2 (ja) | 危険度推定装置 | |
| JP6627021B2 (ja) | 車線変更操舵制御システム | |
| WO2023012671A1 (en) | Vulnerable road user (vru) collision avoidance system | |
| JP6541942B2 (ja) | 区画線検出システム | |
| JP2012123729A (ja) | 車両運転支援システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B06U | Preliminary requirement: requests with searches performed by other patent offices: procedure suspended [chapter 6.21 patent gazette] | ||
| B350 | Update of information on the portal [chapter 15.35 patent gazette] | ||
| B350 | Update of information on the portal [chapter 15.35 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 20 (VINTE) ANOS CONTADOS A PARTIR DE 23/03/2015, OBSERVADAS AS CONDICOES LEGAIS |