BR112016013817B1 - Aparelho para operar em tecido - Google Patents
Aparelho para operar em tecido Download PDFInfo
- Publication number
- BR112016013817B1 BR112016013817B1 BR112016013817-1A BR112016013817A BR112016013817B1 BR 112016013817 B1 BR112016013817 B1 BR 112016013817B1 BR 112016013817 A BR112016013817 A BR 112016013817A BR 112016013817 B1 BR112016013817 B1 BR 112016013817B1
- Authority
- BR
- Brazil
- Prior art keywords
- arm
- block
- grip
- clamping
- gripping
- Prior art date
Links
Images






























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/2812—Surgical forceps with a single pivotal connection
- A61B17/282—Jaws
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00353—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery one mechanical instrument performing multiple functions, e.g. cutting and grasping
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00526—Methods of manufacturing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00681—Aspects not otherwise provided for
- A61B2017/00738—Aspects not otherwise provided for part of the tool being offset with respect to a main axis, e.g. for better view for the surgeon
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00853—Material properties low friction, hydrophobic and corrosion-resistant fluorocarbon resin coating (ptf, ptfe, polytetrafluoroethylene)
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/0088—Material properties ceramic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00982—General structural features
- A61B2017/00995—General structural features having a thin film
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/2812—Surgical forceps with a single pivotal connection
- A61B17/282—Jaws
- A61B2017/2825—Inserts of different material in jaws
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2945—Curved jaws
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B2017/320044—Blunt dissectors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320072—Working tips with special features, e.g. extending parts
- A61B2017/320074—Working tips with special features, e.g. extending parts blade
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
- A61B2017/320093—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw additional movable means performing cutting operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
- A61B2017/320094—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw additional movable means performing clamping operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
- A61B2017/320095—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw with sealing or cauterizing means
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Mechanical Engineering (AREA)
- Biomedical Technology (AREA)
- Dentistry (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
Abstract
recursos de braço de aperto para instrumento cirúrgico ultrassônico. a presente revelação descreve um aparelho cirúrgico que inclui um atuador de extremidade tendo uma lâmina ultrassônica, um braço de aperto e um bloco de aperto. o atuador de extremidade aplica energia ultrassônica na lâmina. o braço de aperto se articula em relação à lâmina. o bloco de aperto é posicionado no braço de aperto adjacente à lâmina. o braço de aperto inclui um recurso de travamento para reter o bloco de aperto em relação ao braço de aperto para impedir que o bloco de aperto se mova lateral, longitudinal e perpendicularmente em relação ao braço de aperto.
Description
[001] Uma variedade de instrumentos cirúrgicos inclui um atuadorde extremidade com um elemento de lâmina que vibra em frequências ultrassônicas para cortar e/ou vedar os tecidos (por exemplo, através da desnaturação de proteínas nas células do tecido). Esses instrumentos incluem elementos piezoelétricos que convertem energia elétrica em vibrações ultrassônicas que são comunicadas ao longo de um guia de ondas acústicas para o elemento de lâmina. A precisão do corte e da coagulação pode ser controlada pela técnica do cirurgião e através do ajuste do nível de energia, do gume da lâmina, da tração do tecido e da pressão da lâmina.
[002] Exemplos de instrumentos cirúrgicos ultrassônicos incluemas Tesouras Ultrassônicas HARMONIC ACE®, as Tesouras Ultrassônicas HARMONIC WAVE®, as Tesouras Ultrassônicas HARMONIC FOCUS® e as Lâminas Ultrassônicas HARMONIC SYNERGY®, todas produzidas pela Ethicon Endo-Surgery, Inc. de Cincinnati, Ohio, EUA. Outros exemplos de tais dispositivos e conceitos relacionados são revelados na patente US n° 5.322.055, intitulada "Clamp Coagulator/Cutting System for Ultrasonic Surgical Instruments", concedida em 21 de junho de 1994, cuja revelação está aqui incorporada a título de referência; na patente US n° 5.873.873, intitulada "Ultrasonic Clamp Coagulator Apparatus Having Improved Clamp Mechanism", concedida em 23 de fevereiro de 1999, cuja revelação está aqui incorporada a título de referência; na patente US n° 5.980.510, intitulada "Ultrasonic Clamp Coagulator Apparatus Having Improved Clamp Arm Pivot Mount", depositada em 10 de outubro de 1997, cuja revelação está aqui incorporada a título de referência; na patente US n° 6.325.811, intitulada "Blades with Functional Balance Asymmetries for use with Ultrasonic Surgical Instruments", concedida em 4 de dezembro de 2001, cuja revelação está aqui incorporada a título de referência; na patente US n° 6.773.444, intitulada "Blades with Functional Balance Asymmetries for Use with Ultrasonic Surgical Instruments", concedida em 10 de agosto de 2004, cuja revelação está aqui incorporada a título de referência; e na patente US n° 6.783.524, intitulada "Robotic Surgical Tool with Ultrasound Cauterizing and Cutting Instrument", concedida em 31 de agosto de 2004, cuja revelação está aqui incorporada a título de referência.
[003] Exemplos adicionais de instrumentos cirúrgicosultrassônicos são revelados na publicação US n° 2006/0079874 intitulada "Tissue Pad for Use with an Ultrasonic Surgical Instrument", publicada em 13 de abril de 2006, cuja revelação está aqui incorporada a título de referência; publicação de patente US n° 2007/0191713 intitulada "Ultrasonic Device for Cutting and Coagulating", publicada em 16 de agosto de 2007, cuja revelação está aqui incorporada a título de referência; publicação de patente US n° 2007/0282333 intitulada "Ultrasonic Waveguide and Blade", publicada em 06 de dezembro de 2007, cuja revelação está aqui incorporada a título de referência; publicação de patente US n° 2008/0200940 intitulada "Ultrasonic Device for Cutting and Coagulating", publicada em 21 de agosto de 2008, cuja revelação está aqui incorporada a título de referência; publicação de patente US n° 2009/0105750 intitulada "Ergonomic Surgical Instruments", publicada em 23 de abril de 2009, cuja revelação está aqui incorporada a título de referência; publicação de patente US n° 2010/0069940, intitulada "Ultrasonic Device for Fingertip Control", publicada em 18 de março de 2010, cuja revelação está incorporada à presente invenção a título de referência; e na publicação de patente US n° 2011/0015660 intitulada "Rotating Transducer Mount for Ultrasonic Surgical Instruments", publicada em 20 de janeiro de 2011, cuja revelação está incorporada à presente invenção a título de referência; e na publicação de patente US n° 2012/0029546 intitulada "Ultrasonic Surgical Instrument Blades", publicada em 2 de fevereiro de 2012, cuja revelação está aqui incorporada a título de referência.
[004] Alguns dos instrumentos cirúrgicos ultrassônicos podemincluir um transdutor sem fio, como o revelado na publicação US n° 2012/0112687, intitulada "Ultrasonic Device for Fingertip Control", publicada em 10 de maio de 2012, cuja revelação está incorporada à presente invenção a título de referência; publicação de patente US n° 2012/0116265, intitulada "Surgical Instrument with Charging Devices", publicada em 10 de maio de 2012, cuja revelação está aqui incorporada a título de referência; e/ou pedido de patente US n° 61/410.603, depositado em 05 de novembro de 2010, intitulado "Energy-Based Surgical Instruments", cuja revelação está aqui incorporada a título de referência.
[005] Adicionalmente, alguns instrumentos cirúrgicos podemincluir uma seção de eixo de articulação. Exemplos destes instrumentos cirúrgicos ultrassônicos são apresentados no pedido de patente US n° 13/538.588, depositado em 29 de junho de 2012, intitulado " Surgical Instruments with Articulating Shafts", cuja descrição está aqui incorporada a título de referência; e publicação de patente US n° 13/657.553, depositada em 22 de outubro de 2012, intitulada "Flexible Harmonic Waveguides/Blades for Surgical Instruments", cuja descrição está aqui incorporada a título de referência.
[006] Embora vários instrumentos e sistemas cirúrgicos tenhamsido desenvolvidos e usados, acredita-se que ninguém antes dos inventores tenha desenvolvido ou usado a invenção descrita nas reivindicações anexas.
[007] Embora o relatório descritivo conclua com as reivindicaçõesque especificamente indicam e distintamente reivindicam esta tecnologia, acredita-se que esta tecnologia será mais bem compreendida a partir da descrição de certos exemplos, tomada em conjunto com os desenhos anexos, nos quais números de referência iguais identificam elementos iguais e, em que:
[008] a Figura 1 representa uma vista em elevação lateral de uminstrumento cirúrgico exemplificador;
[009] a Figura 2A representa uma vista em elevação lateral deum atuador de extremidade do instrumento da Figura 1 em umaposição aberta;
[0010] a Figura 2B representa uma vista em elevação lateral doatuador de extremidade da Figura 2A, em uma posição fechada;
[0011] a Figura 3A representa uma vista em perspectiva explodidade um conjunto de braço de aperto do atuador de extremidade da Figura 2A, que mostra a parte inferior do conjunto de braço de aperto;
[0012] a Figura 3B representa uma vista em seção transversal dobraço de aperto da Figura 3A tomada ao longo da linha 3B-3B da Figura 3A;
[0013] a Figura 3C representa uma vista em seção transversal dobraço de aperto da Figura 3A tomada ao longo da linha 3C-3C da Figura 3A;
[0014] a Figura 4 representa uma vista em seção transversal deum conjunto de cabo do instrumento da Figura 1;
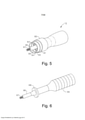
[0015] a Figura 5 representa uma vista em perspectiva de umconjunto de transdutor exemplificador do instrumento da Figura 1;
[0016] a Figura 6 representa uma vista em perspectiva do conjuntode transdutor da Figura 5 com um alojamento do transdutor removido;
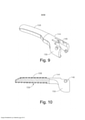
[0017] a Figura 7 representa uma vista em perspectiva de umbraço de aperto alternativo exemplificador adequado para a incorporação ao instrumento da Figura 1;
[0018] a Figura 8 representa uma vista em seção transversal deum dispositivo de molde exemplificador para uso com o braço de aperto da Figura 7;
[0019] a Figura 9 representa uma vista em perspectiva do braçode aperto da Figura 7 montado com um bloco de aperto moldado com sobreposição;
[0020] a Figura 10 representa uma vista em seção transversal dobraço de aperto montado e do bloco de aperto da Figura 9;
[0021] a Figura 11 representa uma vista em seção transversal deum conjunto de braço de aperto moldado com sobreposição alternativo exemplificador adequado para a incorporação ao instrumento da Figura 1;
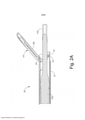
[0022] a Figura 12 representa uma vista em elevação lateral de umdispositivo de montagem para uso com um braço de aperto da Figura 11;
[0023] a Figura 13 representa uma vista de topo do dispositivo demontagem da Figura 12;
[0024] a Figura 14 representa uma vista em seção transversal doconjunto de braço de aperto moldado com sobreposição da Figura 11 montado com o dispositivo de montagem da Figura 12;
[0025] a Figura 15 representa uma vista em perspectiva parcial deum conjunto de braço de aperto alternativo exemplificador com abas adequadas para a incorporação ao instrumento da Figura 1;
[0026] a Figura 16 representa uma vista em perspectiva inferior deum conjunto de braço de aperto alternativo exemplificador adequado para a incorporação ao instrumento da Figura 1;
[0027] a Figura 17 representa uma vista em perspectiva de topo de um braço de aperto do conjunto de braço de aperto da Figura 16;
[0028] a Figura 18 representa uma vista em perspectiva de topode um transportador do braço de aperto da Figura 16;
[0029] a Figura 19 representa uma vista em perspectiva de topode um bloco de aperto do conjunto de braço de aperto da Figura 16;
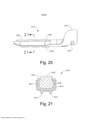
[0030] a Figura 20 representa uma vista de elevação lateral doconjunto de braço de aperto da Figura 16;
[0031] a Figura 21 representa uma vista em seção transversal doconjunto de braço de aperto da Figura 16, tomada ao longo da linha 21-21 da Figura 20;
[0032] a Figura 22 representa uma vista em perspectiva parcial deum braço de aperto alternativo exemplificador com barbelas adequadas para a incorporação ao instrumento da Figura 1;
[0033] a Figura 23 representa uma vista em perspectiva de umbloco de aperto para uso com o braço de aperto da Figura 22;
[0034] a Figura 24 representa uma vista em seção transversal dobloco de aperto da Figura 23 montado com o braço de aperto da Figura 22;
[0035] a Figura 25 representa uma vista em seção transversal deum conjunto de braço de aperto alternativo exemplificador com sulcos adequados para incorporação ao instrumento da Figura 1;
[0036] a Figura 26 representa uma vista em planta inferior de umbraço de aperto do conjunto de braço de aperto da Figura 25;
[0037] a Figura 27A representa uma vista em perspectiva de topode um braço de aperto alternativo exemplificador com uma configuração de fenda em t adequada para a incorporação ao instrumento da Figura 1;
[0038] a Figura 27B representa uma vista em perspectiva inferiordo braço de aperto da Figura 27A;
[0039] a Figura 28 representa uma vista em perspectiva parcial de um conjunto de braço de aperto alternativo exemplificador com fendas de parede lateral adequadas para a incorporação ao instrumento da Figura 1;
[0040] a Figura 29 representa uma vista em planta de topo de umbloco de aperto do conjunto de braço de aperto da Figura 28;
[0041] a Figura 30 representa uma vista em perspectiva parcial deum braço de aperto do conjunto de braço de aperto da Figura 28;
[0042] a Figura 31 representa uma vista em seção transversal deum conjunto de braço de aperto alternativo exemplificador com um pino adequado para a incorporação ao instrumento da Figura 1;
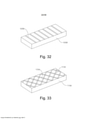
[0043] a Figura 32 representa uma vista em perspectiva de umbloco de aperto alternativo exemplificador com sulcos laterais adequados para a incorporação ao instrumento da Figura 1;
[0044] a Figura 33 representa uma vista em perspectiva de umbloco de aperto alternativo exemplificador com sulcos entrelaçados adequados para a incorporação ao instrumento da Figura 1;
[0045] a Figura 34 representa uma vista em perspectiva de umbloco de aperto alternativo exemplificador com cerdas adequadas para a incorporação ao instrumento da Figura 1;
[0046] a Figura 35 representa uma vista em elevação lateral dobloco de aperto da Figura 34;
[0047] a Figura 36 representa uma vista em elevação lateral de umbloco de aperto alternativo exemplificador com cerdas escalonadas adequadas para a incorporação ao instrumento da Figura 1;
[0048] a Figura 37 representa uma vista em perspectiva de umbloco de aperto alternativo exemplificador com dentes de serra adequados para a incorporação ao instrumento da Figura 1;
[0049] a Figura 38 representa uma vista em perspectiva de umbloco de aperto alternativo exemplificador com dentes em forma de V invertido adequados para a incorporação ao instrumento da Figura 1;
[0050] a Figura 39 representa uma vista em perspectiva de umbloco de aperto alternativo exemplificador com dentes em forma de V opostos adequados para a incorporação ao instrumento da Figura 1;
[0051] a Figura 40 representa uma vista em perspectiva de umbloco de aperto alternativo exemplificador com dentes semicirculares invertidos adequados para a incorporação ao instrumento da Figura 1;
[0052] a Figura 41 representa uma vista em perspectiva de umbloco de aperto alternativo exemplificador com dentes semicirculares opostos adequados para a incorporação ao instrumento da Figura 1;
[0053] a Figura 42 representa uma vista em perspectiva de umbloco de aperto alternativo exemplificador com dentes de serra com dois níveis adequados para a incorporação ao instrumento da Figura 1;
[0054] a Figura 43 representa uma vista em elevação lateral dobloco de aperto da Figura 42;
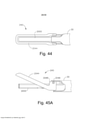
[0055] a Figura 44 representa uma vista de topo de um atuador deextremidade alternativo exemplificador com uma configuração de braço de aperto em formato de U adequada para a incorporação ao instrumento da Figura 1;
[0056] a Figura 45A representa uma vista em elevação lateral doatuador de extremidade da Figura 44, em uma configuração aberta;
[0057] a Figura 45B representa uma vista em elevação lateral doatuador de extremidade da Figura 44, em uma configuração fechada;
[0058] a Figura 46 representa uma vista em seção transversal doatuador de extremidade da Figura 44 tomada ao longo da linha 46-46 da Figura 45B, mostrando o tecido apertado no atuador de extremidade;
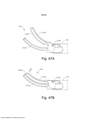
[0059] a Figura 47A representa uma vista em elevação lateral deum atuador de extremidade alternativo exemplificador com uma configuração côncava adequada para a incorporação ao instrumento da Figura 1, em uma configuração aberta;
[0060] a Figura 47B representa uma vista em elevação lateral doatuador de extremidade da Figura 47A em uma configuração fechada;
[0061] a Figura 48 mostra uma vista em planta superior do atuadorde extremidade da Figura 47A;
[0062] a Figura 49A representa uma vista em elevação lateral deum atuador de extremidade alternativo exemplificador com uma configuração convexa adequada para a incorporação ao instrumento da Figura 1, em uma configuração aberta;
[0063] a Figura 49B representa uma vista em elevação lateral doatuador de extremidade da Figura 49A em uma configuração fechada;
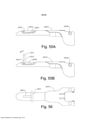
[0064] a Figura 50A representa uma vista em elevação lateral deum atuador de extremidade alternativo exemplificador com um braço de aperto reto maleável adequado para a incorporação ao instrumento da Figura 1, em uma configuração aberta;
[0065] a Figura 50B representa uma vista em elevação lateral doatuador de extremidade da Figura 50A em uma configuração fechada;
[0066] a Figura 51A representa uma vista em elevação lateral deum atuador de extremidade alternativo exemplificador com um braço de aperto curvado maleável adequado para a incorporação ao instrumento da Figura 1, em uma configuração aberta;
[0067] a Figura 51B representa uma vista em elevação lateral doatuador de extremidade da Figura 51A em uma configuração fechada;
[0068] a Figura 52 representa uma vista em seção transversal deum braço de aperto alternativo exemplificador com um bloco de aperto moldado com sobreposição para uso com o atuador de extremidade da Figura 51A;
[0069] a Figura 53 representa uma vista em seção transversal deum braço de aperto alternativo exemplificador com um material maleável para uso com o atuador de extremidade da Figura 51A;
[0070] a Figura 54 representa uma vista em seção transversal deum braço de aperto alternativo exemplificador com um membro resiliente para uso com o atuador de extremidade da Figura 51A;
[0071] a Figura 55A representa uma vista em seção transversal deum braço de aperto alternativo exemplificador com um recurso de dissecção romba adequado para a incorporação ao instrumento da Figura 1, mostrando o recurso de dissecção romba em uma posição neutra;
[0072] a Figura 55B representa uma vista em seção transversal dobraço de aperto da Figura 55A, mostrando o recurso de dissecção romba em uma posição de utilização
[0073] a Figura 56 representa uma vista em planta do braço deaperto da Figura 55A, mostrando o recurso de dissecção romba naposição neutra;
[0074] a Figura 57 representa uma vista em elevação lateral dobraço de aperto da Figura 55A, mostrando o recurso de dissecção romba que realiza uma dissecção romba do tecido;
[0075] a Figura 58 representa uma vista de topo de um braço deaperto alternativo exemplificador com um recurso de dissecção romba curvada adequada para a incorporação ao instrumento da Figura 1, com o recurso de dissecção romba em uma posição neutra;
[0076] a Figura 59 representa uma vista da extremidade frontal dobraço de aperto da Figura 58, com o recurso de dissecção romba em uma posição de utilização;
[0077] a Figura 60 representa uma vista em elevação lateral de umbraço de aperto alternativo exemplificador com uma protuberância adequada para a incorporação ao instrumento da Figura 1;
[0078] a Figura 61 representa uma vista em elevação lateral de umbraço de aperto alternativo exemplificador com uma reentrância adequada para a incorporação ao instrumento da Figura 1;
[0079] a Figura 62A representa uma vista em seção transversal deum braço de aperto alternativo exemplificador com um revestimento adequado para a incorporação ao instrumento da Figura 1, mostrando o revestimento em um estado não preenchido; e
[0080] a Figura 62B representa uma vista em seção transversal dobraço de aperto da Figura 64A, mostrando o revestimento em uma posição preenchida;
[0081] Os desenhos não pretendem ser limitadores de modoalgum e contempla-se que várias modalidades da tecnologia podem ser executadas em uma variedade de outras maneiras, incluindo aquelas não necessariamente representadas nos desenhos. Os desenhos incorporados em anexo e formando uma parte do relatório descritivo ilustram vários aspectos da presente tecnologia e, em conjunto com a descrição, servem para explicar os princípios da tecnologia; entende-se, entretanto, que esta tecnologia não se limita precisamente às disposições mostradas.
[0082] A descrição a seguir de certos exemplos da tecnologia nãodeve ser usada para limitar o seu escopo. Outros exemplos, elementos, aspectos, modalidades e vantagens da tecnologia se tornarão evidentes aos versados na técnica com a descrição a seguir, que é por meio de ilustrações, um dos melhores modos contemplados para realização da tecnologia. Conforme será compreendido, a tecnologia aqui descrita é capaz de outros aspectos diferentes e óbvios, todos sem desconsiderar a invenção. Consequentemente, os desenhos e as descrições devem ser considerados como de natureza ilustrativa e não restritiva.
[0083] É entendido adicionalmente que qualquer um ou maisdentre os ensinamentos, expressões, modalidades, exemplos etc. aqui descritos podem ser combinados com qualquer um ou mais dentre os outros ensinamentos, expressões, modalidades, exemplos etc. que são descritos na presente invenção. Os ensinamentos, expressões, modalidades, exemplos etc. descritos a seguir não devem ser vistos isoladamente um em relação ao outro. Várias maneiras adequadas, pelas quais os ensinamentos da presente invenção podem ser combinados, se tornarão prontamente evidentes aos versados na técnica tendo em vista dos ensinamentos da presente invenção. Essas modificações e variações são destinadas a serem incluídas no escopo das reivindicações anexas.
[0084] Para maior clareza da revelação, os termos "proximal" e"distal" são aqui definidos em relação a um operador humano ourobótico do instrumento cirúrgico. O termo "proximal" se refere à posição de um elemento mais próximo ao operador humano ourobótico do instrumento cirúrgico e mais afastado do atuador deextremidade cirúrgico do instrumento cirúrgico. O termo "distal" se refere à posição de um elemento mais próximo ao atuador deextremidade cirúrgico do instrumento cirúrgico e mais afastado do operador humano ou robótico do instrumento cirúrgico.
[0085] A Figura 1 ilustra um instrumento cirúrgico ultrassônicoexemplificador 10 que é configurado para ser usado em um procedimento cirúrgico minimamente invasivo (por exemplo, através de um trocarte ou outra porta de acesso de pequeno diâmetro, etc.). Ao menos parte do instrumento 10 pode ser construída e operável de acordo com pelo menos alguns dos ensinamentos da patente US n° 5.322.055; patente US n° 5.873.873; patente US n° 5.980.510; patente US n° 6.325.811; patente US n° 6.773.444; patente US n° 6.783.524; publicação de patente US n° 2006/0079874; publicação de patente US n° 2007/0191713; publicação de patente US n° 2007/0282333; publicação de patente US n° 2008/0200940; publicação de patente US n° 2009/0105750; publicação de patente US n° 2010/0069940; publicação de patente US n° 2011/0015660; publicação de patente US n° 2012/0112687; publicação de patente US n° 2012/0116265; pedido de patente US n° 13/538.588; pedido de patente US n° 13/657.553; pedido de patente US n° 61/410.603; e/ou pedido de patente US n° 14/028.717. As revelações de cada uma das patentes, publicações e pedidos supracitados estão aqui incorporadas a título de referência. Conforme descrito nas mesmas e conforme será descrito com mais detalhes abaixo, o instrumento 10 é operável para cortar tecidos e vedar ou soldar tecidos (por exemplo, um vaso sanguíneo etc.) substancialmente simultaneamente. Deve-se entender que o instrumento 10 pode ter várias semelhanças estruturais e funcionais com as tesouras ultrassônicas HARMONIC ACE®, as tesouras ultrassônicas HARMONIC WAVE®, as tesouras ultrassônicas HARMONIC FOCUS® e/ou com as lâminas ultrassônicas HARMONIC SYNERGY®. Ademais, o instrumento 10 pode ter várias semelhanças estruturais e funcionais com os dispositivos ensinados em qualquer uma das outras referências citadas e incorporadas para fins de referência na presente invenção.
[0086] Até o ponto em que houver algum grau de sobreposiçãoentre os ensinamentos das referências citadas na presente invenção, nas tesouras ultrassônicas HARMONIC ACE®, nas tesouras ultrassônicas HARMONIC WAVE®, nas tesouras ultrassônicas HARMONIC FOCUS® e/ou nas lâminas ultrassônicas HARMONIC SYNERGY®, e nos ensinamentos a seguir relacionados ao instrumento 10, não se pretende que qualquer descrição contida na presente invenção seja entendida como reconhecida como técnica anterior. Pelo contrário, o escopo de vários dos ensinamentos da presente invenção é mais amplo que o escopo dos ensinamentos das referências citadas na presente invenção e das tesouras ultrassônicas HARMONIC ACE®, das tesouras ultrassônicas HARMONIC WAVE®, das tesouras ultrassônicas HARMONIC FOCUS® e das lâminas ultrassônicas HARMONIC SYNERGY®.
[0087] O instrumento 10 do presente exemplo compreende umatuador de extremidade 40, um conjunto de eixo 30 e um conjunto de cabo 20. O atuador de extremidade 40 compreende uma lâmina ultrassônica 100 e um braço de aperto 44 que é articulável na direção e na direção oposta à lâmina ultrassônica 100 para, desse modo, apertar o tecido entre o braço de aperto 44 e a lâmina ultrassônica 100 para cortar e/ou vedar o tecido. O atuador de extremidade 40 é acoplado ao conjunto de cabo 20 por meio do conjunto de eixo 30. Conforme mostrado nas Figuras 2A e 2B, o conjunto de eixo 30 compreende uma bainha externa 32, um tubo interno 34 disposto de modo deslizante dentro da bainha externa 32 e um guia de ondas 102 disposto dentro do tubo interno 34. Conforme será discutido mais detalhadamente abaixo, a translação longitudinal do tubo interno 34 provoca a atuação do braço de aperto 44 no atuador de extremidade 40.
[0088] Conforme se pode observar melhor na Figura 2B, umaextremidade distal de tubo interno 34 é acoplada rotacionalmente a uma extremidade proximal do braço de aperto 44 abaixo da lâmina ultrassônica 100 por meio de um par de pinos 35 que são integrados ao braço de aperto 44, de modo que a translação longitudinal do tubo interno 34 em relação à bainha externa 32 e o conjunto de cabo 20 cause a rotação de braço de aperto 44 ao redor do pino 45 em direção e na direção oposta à lâmina ultrassônica 100 para, desse modo, apertar o tecido entre o braço de aperto 44 e a lâmina ultrassônica 100 para cortar e/ou vedar o tecido. Especificamente, a translação longitudinal proximal do tubo interno 34 em relação à bainha externa 32 e ao conjunto de cabo 20 faz com que o braço de aperto 44 se mova em direção à lâmina ultrassônica 100; e a translação longitudinal distal do tubo interno 34 em relação à bainha externa 32 e ao conjunto de cabo 20 faz com que o braço de aperto 44 se mova na direção contrária à lâmina ultrassônica 100.
[0089] O braço de aperto 44 inclui um bloco de aperto 58 montadono braço de aperto 44 para a cooperação com a lâmina 100. Por exemplo, o movimento pivotante do braço de aperto 44 posiciona o bloco de aperto 58 em uma relação substancialmente paralela, e em contato com, a lâmina 100 ou tecido contra a lâmina 100 para, desse modo, definir uma região de compressão de tecido, conforme mostrado na Figura 2B. Através dessa construção, o tecido é apertado e comprimido entre o bloco de aperto 58 e a lâmina 100. Quando a lâmina 100 estiver em um estado não ativado, o bloco de aperto 58 e a lâmina 100 podem cooperar para fornecer uma preensão simples do tecido. Quando a lâmina 100 estiver em um estado ativado, conforme descrito com mais detalhes abaixo, o bloco de aperto 58 e a lâmina 100 podem servir e/ou vedar o tecido comprimido entre o bloco de aperto 58 e a lâmina 100.
[0090] A Figura 3A mostra o lado do bloco de aperto 58 que ficavoltado para a lâmina 100. Conforme mostrado, o bloco de aperto 58 desse exemplo inclui uma posição distal 58A com uma superfície não lisa, como uma configuração do tipo dente de serra para intensificar a preensão do tecido em cooperação com a lâmina 100. A configuração do tipo dente de serra, ou os dentes, fornecem tração contra o movimento da lâmina 100. Logicamente, a configuração do tipo dente de serra é apenas um exemplo de muitas superfícies de engate de tecido para fornecer o movimento do tecido em relação ao movimento da lâmina 100. Outras configurações adequadas para a porção distal 58A do bloco de aperto 58 serão evidentes aos versados na técnica em vista dos ensinamentos da presente invenção. Por exemplo, a posição distal 58A pode incluir saliências, padrões reticulados, padrões estriados, uma microesfera ou superfície jateada com areia, etc.
[0091] O bloco de aperto 58 inclui adicionalmente uma porçãoproximal 58B que é mais lisa do que a posição distal 58A, de modo que a porção proximal 58B possa ser desprovida de dentes do tipo dente de serra ou outras superfícies de tração de tecido. A utilização de uma porção proximal lisa 58B no bloco de aperto 58 permite que o tecido na região proximal se mova distalmente, seguindo o movimento vibratório da lâmina 100, para a região mais ativa da lâmina 100. Durante a operação, o tecido na região proximal do atuador de extremidade 40 (área da porção 58B) pode dessecar e se tornar mais fino; e a posição distal do atuador de extremidade 40 (área da posição distal 58A) pode transectar o tecido nessa região distal permitindo, desse modo, o tecido dessecado e fino na região proximal para deslizar distalmente para a região mais ativa do atuador de extremidade 40 para concluir a transação do tecido. O bloco de aperto 58 pode ser produzir com politetrafluoroetileno (PTFE) ou qualquer outro material de baixo atrito adequado. O bloco de aperto 58 pode ser formado em uma única peça; ou o bloco de aperto 58 pode ser formado por duas peças separadas. Várias variações ilustrativas do bloco de aperto 58 serão descritas em mais detalhes abaixo, enquanto ainda outras configurações adequadas para o bloco de aperto 58 serão evidentes para um indivíduo com habilidade comum na técnica em vista dos ensinamentos do presente documento.
[0092] Conforme mostrado nas Figuras 3A a 3C, o braço de aperto44 tem fendas em formatos diferentes 53a, 55a para aceitar o bloco de aperto 58. Essa configuração pode impedir o carregamento errado do bloco de aperto 58 e pode garantir que o bloco de aperto 58 seja carregado na localização correta no braço de aperto 44. Por exemplo, o braço de aperto 44 compreende uma fenda em formato de T distal 53a para aceitar um flange em formato de T 53B da posição distal 58A do bloco de aperto 58; e uma fenda em formato de cunha proximal ou em formato de cauda de andorinha 55a para aceitar um flange em formato de cunha 55B da porção proximal 58B do bloco de aperto 58. O bloco de aperto 58 pode ser inserido no braço de aperto 44 colocando-se o bloco 58 no braço de aperto 44 e, então, apertando-se o braço de aperto 44 para baixo para encaixar os flanges 53B, 55B do bloco 58 nas fendas 53a, 53b para prender o bloco 58 ao braço de aperto 44. O batente de aba 51 se engata à extremidade proximal do bloco de aperto proximal 58B para prender o bloco de aperto 58 no braço de aperto 44. Deve-se notar que os flanges 53B, 55B e as fendas correspondentes 53a, 55a podem ter formatos e tamanhos alternativos para prender o bloco de aperto 58 ao braço de aperto 44. Ademais, outros batentes de aba 51 são possíveis e podem empregar várias técnicas para fixar mecanicamente o bloco de aperto 58 ao braço de aperto 44, como rebites, cola, encaixe por pressão, etc.
[0093] O braço de aperto 44 é articulado em relação à lâmina 100atuando-se o conjunto de cabo 20. Com referência à Figura 1, o conjunto de cabo 120 compreende um corpo 22 que inclui uma garra de pistola 24, um par de botões 26 e um gatilho 28 que é articulável em direção à e distante da garra de pistola 24. No presente exemplo, a articulação do gatilho 28 em direção à empunhadura de pistola 24 faz com que o braço de aperto 44 se mova em direção à lâmina ultrassônica 100; e a articulação do gatilho 28 na direção contrária à empunhadura de pistola 24 faz com que o braço de aperto 44 se mova na direção contrária à lâmina ultrassônica 100. Deve-se compreender, no entanto, que várias outras configurações adequadas podem ser usadas.
[0094] Conforme mostrado na Figura 4, o gatilho 28 é acoplado de modo pivotante ao conjunto de cabo 20 por meio de um pino 23A de forma que o gatilho 28 gira sobre um eixo localizado abaixo do conjunto de eixo 30. O gatilho 28 é acoplado a uma forquilha 21 por meio de uma ligação 29 de modo que a rotação do gatilho 28 em torno do pino 23A provoque a translação longitudinal da forquilha 21. Uma primeira extremidade 29A da ligação 29 é acoplada rotacionalmente a uma porção proximal do gatilho 28 por meio de um pino 23B. Uma segunda extremidade 29B da ligação 29 é acoplada rotacionalmente a uma porção proximal da forquilha 26 por meio de um pino 23C. Um par de projeções em formato oval alongado 27 se estende para dentro das superfícies internas do corpo 22. Uma superfície interna de projeção em formato oval 27 define uma fenda em formato oval alongado 27A. O pino 23C passa completamente pela porção proximal da forquilha 26 e segunda extremidade 29B da ligação 29 de modo que as extremidades do pino 23C se estendam a partir dos lados opostos da forquilha 26. Essas extremidades do pino 23C são posicionadas de maneira deslizante e giratória no interior das fendas em formato oval 27A. Um pino 23D passa completamente por uma porção distal da forquilha 26 de modo que as extremidades do pino 23D se estendam a partir dos lados opostos da forquilha 21. Essas extremidades do pino 23D são posicionadas de maneira deslizante e giratória no interior nas fendas em formato oval 27A. Deve-se compreender, portanto, que a forquilha 21 é deslocável de maneira longitudinal por meio de pinos 23C, 23D no interior das fendas em formato oval 27A entre uma posição longitudinal proximal e uma posição longitudinal distal. Além disso, devido ao fato de que a porção proximal do gatilho 28 é acoplada à forquilha 21 por meio de ligação 29, deve-se compreender que a articulação do gatilho 28 em direção à empunhadura de pistola 24 provocará a translação longitudinal proximal da forquilha 21 no interior das fendas em formato oval 27A; e que a articulação do gatilho 28 na direção contrária à empunhadura de pistola 24 provocará a translação longitudinal distal da forquilha 21 no interior das fendas em formato oval 27A.
[0095] Uma porção distal da forquilha 21 é acoplada ao tubointerno 34 do conjunto de eixo 30 por meio de um conjunto de acoplamento 37. Conforme discutido acima, o tubo interno 34 é deslocável de maneira longitudinal no interior da bainha externa 32. Portanto, deve ser compreendido que o tubo interno 34 é configurado para trasladar longitudinalmente de modo concomitante com a forquilha 21. Além disso, devido ao fato de que a articulação do gatilho 28 em direção à empunhadura de pistola 24 provoca a translação longitudinal proximal da forquilha 21, deve-se compreender que a articulação do gatilho 28 em direção à empunhadura de pistola 24 provocará a translação longitudinal proximal do tubo interno 34 em relação à bainha externa 32 e ao conjunto de cabo 20. Finalmente, devido ao fato de que a articulação do gatilho 28 na direção contrária à empunhadura de pistola 24 provoca a translação longitudinal distal da forquilha 21, deve-se compreender que a articulação do gatilho 28 na direção contrária à empunhadura de pistola 24 provocará a translação longitudinal distal do tubo interno 34 em relação à bainha externa 32 e ao conjunto de cabo 20. Conforme mostrado na Figura 4, uma mola 36 é posicionada no interior de uma extremidade proximal do corpo 22 do conjunto de cabo 20. A mola 36 fica distalmente contra uma porção do corpo 22 e uma extremidade proximal da forquilha 21 para inclinar assim a forquilha 21 em direção à posição distal. A inclinação da forquilha 21 em direção à posição distal faz com que o tubo interno 34 fique inclinado em posição distal e adicionalmente faz com que o gatilho 28 fique inclinado na direção contrária à empunhadura de pistola 24. O braço de aperto 44 é, dessa forma, resilientemente forçado para a posição aberta, conforme mostrado na Figura 2A.
[0096] Conforme mostrado na Figura 1, um conjunto de transdutorultrassônico 12 se estende de maneira proximal a partir do corpo 22 do conjunto de cabo 20. Conforme será discutido em mais detalhes abaixo, o conjunto de transdutor 12 recebe energia elétrica do gerador 16 e converte essa energia em vibrações ultrassônicas através de princípios piezoelétricos, como será descrito em mais detalhes abaixo. O gerador 16 pode incluir uma fonte de energia e um módulo de controle que é configurado para fornecer um perfil de energia ao conjunto de transdutor 12, que é especialmente adequado para a geração de vibrações ultrassônicas através do conjunto de transdutor 12. Somente a título de exemplo, o gerador 16 pode compreender um GEN 300 vendido pela Ethicon Endo-Surgery, Inc. de Cincinnati, Ohio, EUA. Adicional ou alternativamente, o gerador 16 pode ser construído de acordo com ao menos alguns dos ensinamentos da publicação de patente US n° 2011/0087212 intitulada "Ultrasonic Device for Cutting and Coagulating", publicada em 14 de abril de 2011, cuja revelação está aqui incorporada a título de referência. Deve-se entender também que ao menos algumas das funcionalidades do gerador 16 podem ser integradas ao conjunto do cabo 20, e que o conjunto do cabo 20 pode até mesmo incluir uma bateria ou outra fonte de energia embutida, de modo que o cabo 14 seja omitido. Outras formas adequadas que o gerador 16 pode assumir, bem como vários recursos e operacionalidades que o gerador 16 pode fornecer, se tornarão evidentes para os versados na técnica a partir dos ensinamentos da presente invenção.
[0097] Conforme mostrado na Figura 1, o conjunto de transdutor12 do presente exemplo é um componente tubular que é acoplado ao gerador 16 através do cabo 14, embora deva-se compreender que o conjunto de transdutor 12 pode receber energia de uma fonte que é integrada ao instrumento 10 de modo que o conjunto de transdutor 12 seja sem fio. Conforme mostrado na Figura 5, o conjunto de transdutor 12 do presente exemplo inclui um alojamento 60, que é isolado acusticamente dos elementos de vibração ultrassônica do conjunto de transdutor 12. A extremidade distal do conjunto de transdutor 12 inclui um primeiro anel condutivo 65 e um segundo anel condutivo 64, que são, ambos, dispostos no interior do alojamento 60 do conjunto de transdutor 12. O primeiro anel condutivo 65 compreende um membro de anel que é disposto entre o alojamento 60 e um mastro 66, que se estende distalmente a partir do alojamento 60. O mastro 66 compreende um ferrolho rosqueado 67 que se estende distalmente a partir do mesmo de modo que o mastro 66 possa ser acoplado de modo rosqueado a um furo rosqueado 104 formado em uma extremidade proximal do guia de ondas 102 (consulte a Figura 4). O primeiro anel condutivo 65 é formado adjacente a, ou como parte de um flange 61 dentro de uma cavidade do transdutor 62 de modo que o primeiro anel condutivo 65 seja eletricamente isolado do segundo anel condutivo 64 e de outros componentes condutivos do conjunto de transdutor 12. O primeiro anel condutivo 65 está situado sobre uma plataforma não condutiva que se estende distalmente do alojamento 60. O primeiro anel condutivo 65 é acoplado eletricamente a um cabo, tal como o cabo 14, mostrado na Figura 1, por um ou mais fios elétricos ou entalhes condutivos não mostrados dentro do alojamento 60.
[0098] O segundo anel condutivo 64 do conjunto de transdutor 12compreende, de modo similar, um elemento anelar que é disposto entre o alojamento 60 e a mastro 66. O segundo anel condutivo 64 está disposto entre o primeiro anel condutivo 65 e o mastro 66. Conforme é mostrado na Figura 5, o primeiro e o segundo anéis condutivos 64, 65 são membros concêntricos que sãolongitudinalmente deslocados uns dos outros, com o anel condutivo 65 que também é posicionado a uma maior distância radial do eixo central compartilhado pelos anéis condutivos 64, 65. O segundo anelcondutivo 64 é, de modo similar, eletricamente isolado do primeiro anel condutivo 65 e de outros componentes condutivos do conjunto de transdutor 12. De modo similar ao primeiro anel condutivo 65, o segundo anel condutivo 64 estende-se a partir da plataforma não condutiva. Um ou mais espaçadores em formato de arruela 63 podem ser dispostos entre o primeiro e o segundo anéis condutivos 64, 65, ou entre os anéis 64, 65 e outros elementos do conjunto de transdutor 12. O segundo anel condutivo 64 é também acoplado eletricamente a um cabo, como o cabo 14, mostrado na Figura 1, por um ou mais fios elétricos ou entalhes condutivos (não mostrados) dentro do alojamento 60. Um conjunto de transdutor ultrassônico adequado 12 meramente exemplificador é o Modelo n° HP054, vendido pela Ethicon Endo-Surgery, Inc., de Cincinnati, Ohio, EUA.
[0099] Conforme discutido anteriormente, a extremidade distal doconjunto de transdutor 12 se acopla por rosqueamento a um furo rosqueado 104 formado na extremidade proximal da guia de ondas 102 através do ferrolho rosqueado 67 do mastro 66. A extremidade distal do conjunto de transdutor 12 também faz interface com uma ou mais conexões elétricas (não mostradas), através do primeiro e do segundo anéis condutivos 64, 65, para acoplar eletricamente o conjunto de transdutor 12 aos botões 26 visando fornecer a um usuário controles ativados pelos dedos para a ativação do conjunto de transdutor 12 durante o uso do instrumento cirúrgico 10. Em algumas variações, o primeiro e o segundo anéis condutivos 64, 65 podem ser omitidos da extremidade distal do conjunto distal do transdutor 12 e o acoplamento elétrico do conjunto de transdutor 12 aos botões 126 pode ser feito usando-se estruturas alternativas, como condutores na extremidade proximal do conjunto de transdutor 12, condutores situados ao longo da lateral do alojamento 60 do conjunto de transdutor 12, diretamente a partir do cabo 14 e/ou quaisquer outras estruturas e configurações, conforme será evidente para o versado na técnica com base nos ensinamentos da presente invenção.
[00100] A Figura 6 representa o conjunto de transdutor 12 com o alojamento 60 removido. O flange de montagem 68 próximo da extremidade distal do conjunto de transdutor 12 e a pilha piezoelétrica 69 na extremidade proximal do conjunto de transdutor 12 podem ser vistos com o alojamento 60 removido. Quando o conjunto de transdutor 12 do presente exemplo for ativado por meio de um botão 26, é criado um campo elétrico na pilha piezoelétrica 69, fazendo com que a pilha piezoelétrica 69 e o mastro 66 oscilem dentro do e em relação ao alojamento 60. O flange de montagem 68 é usado para acoplar o mastro 66 ao alojamento 60, para, desse modo, suportar a pilha piezoelétrica 69 no alojamento 60. O flange de montagem 68 está situado em um nó associado às vibrações ultrassônicas ressonantes comunicadas através da pilha piezoelétrica 69 para o mastro 66. O conjunto de transdutor 12 é operável para criar energia mecânica, ou vibrações, a uma frequência ultrassônica (como 55,5 kHz). Se o conjunto de transdutor 12 for acoplado à guia de ondas 102 por meio do mastro 66, então essas oscilações mecânicas serão transmitidas através da guia de ondas 102 para a lâmina ultrassônica do atuador de extremidade 40. No presente exemplo, a lâmina ultrassônica 100, que é acoplada à guia de ondas 102, oscila na frequência ultrassônica. Dessa forma, quando o tecido for preso entre a lâmina ultrassônica 100 e o braço de aperto 44, a oscilação da lâmina ultrassônica 100 pode cortar e/ou vedar o tecido. Embora alguns recursos e algumas configurações exemplificadores para o conjunto de transdutor 12 tenham sido descritos, ainda outros recursos e outras configurações adequados para o conjunto de transdutor 12 serão evidentes para o versado na técnica em vista dos ensinamentos da presente invenção.
[00101] Vibrações ultrassônicas geradas pelo conjunto de transdutor 12 são comunicadas ao longo de um guia de ondas acústico 102, que se estende através do conjunto de eixo 30 até atingir a lâmina ultrassônica 100, conforme mostrado nas Figuras 2A a 2B. Conforme mostrado na Figura 4, o guia de ondas 102 está preso dentro do conjunto de eixo 30 por meio de um pino 33, que passa através do guia de ondas 102 e do conjunto de eixo 30. O pino 33 está situado em uma posição ao longo do comprimento do guia de ondas 102 que corresponde a um nó associado às vibrações ultrassônicas ressonantes comunicadas através do guia de ondas 102. Como se observa acima, quando a lâmina ultrassônica 100 está em um estado ativado (isto é, vibrando ultrassonicamente), a lâmina ultrassônica 100 tem por finalidade cortar eficazmente através do tecido e vedá-lo, particularmente quando o tecido está sendo comprimido entre o braço de aperto 44 e a lâmina ultrassônica 100. Deve-se entender que o guia de ondas 102 pode ser configurado para amplificar vibrações magnéticas transmitidas através do guia de ondas 102. Além disso, o guia de ondas 102 pode incluir ainda recursos para controlar o ganho de vibrações longitudinais ao longo do guia de ondas 102 e/ou recursos para sintonizar o guia de ondas 102 à frequência ressonante do sistema.
[00102] No presente exemplo, a extremidade distal da lâmina ultrassônica 100 está situada em uma posição que corresponde a um antinó associado às vibrações ultrassônicas ressonantes, comunicadas através do guia de ondas 102, para sintonizar o conjunto acústico a uma frequência ressonante fo preferencial quando o conjunto acústico não está carregado com tecido. Quando o conjunto de transdutor 12 estiver energizado, a extremidade distal da lâmina ultrassônica 100 é configurada para se mover longitudinalmente na faixa de, por exemplo, aproximadamente 10 a 500 mícrons de pico a pico e, em alguns casos, na faixa de cerca de 20 a cerca de 200 mícrons em uma frequência vibratória fo predeterminada de, por exemplo, 55,5 kHz. Quando o conjunto de transdutor 12 do presente exemplo for ativado, essas oscilações mecânicas são transmitidas através do guia de ondas 102 para chegar à lâmina ultrassônica 100, promovendo assim a oscilação da lâmina ultrassônica 100 na frequência ultrassônica ressonante. Portanto, quando o tecido é fixado entre a lâmina ultrassônica 100 e o bloco de aperto 58, a oscilação ultrassônica da lâmina ultrassônica 100 pode simultaneamente cortar o tecido e desnaturar as proteínas nas células do tecido adjacente, fornecendo, assim, um efeito coagulante com relativamente pouca propagação térmica. Em algumas versões, uma corrente eléctrica pode também ser fornecida através de um ou tanto da lâmina ultrassônica 100 como do bloco de aperto 58 para eletrocauterizar o tecido. Por exemplo, energia de RF monopolar ou bipolar pode ser fornecida através de um ou tanto da lâmina ultrassônica 100 como do bloco de aperto 58. Embora algumas configurações para um conjunto de transmissão acústica e conjunto de transdutor 12 tenham sido descritas, outras configurações adequadas para um conjunto de transmissão acústica e conjunto de transdutor 12 se tornarão evidentes aos versados na técnica em vista dos ensinamentos da presente invenção. De modo similar, outras configurações adequadas para o atuador de extremidade 40 se tornarão evidentes para os versados na técnica em vista dos ensinamentos da presente invenção.
[00103] Um operador pode ativar botões 26 para ativar seletivamente o conjunto de transdutor 12 para, desse modo, ativar a lâmina ultrassônica 100. No presente exemplo, dois botões 26 são fornecidos - um para ativar a lâmina ultrassónica 100 com uma energia baixa e outro para ativar a lâmina ultrassônica 100 com uma energia alta. No entanto, deve-se entender que pode ser fornecido qualquer outro número adequado de botões e/ou níveis de energia selecionáveis. Os botões 26 do presente exemplo estão posicionados de modo que um operador possa operar pronta e completamente o instrumento 10 com uma única mão. Por exemplo, o operador pode posicionar seu polegar sobre a empunhadura de pistola 24, posicionar seu dedo médio, anelar ou mínimo sobre o gatilho 28 e manipular os botões 26 usando seu dedo indicador. Obviamente, quaisquer outras técnicas adequadas podem ser usadas para segurar e operar o instrumento 10; e os botões 26 podem estar localizados em quaisquer outras posições adequadas. Deve-se compreender também que vários outros tipos de recursos de entrada do usuário podem ser usados para seletivamente ativar o conjunto de transdutor 12. Por exemplo, pode ser fornecido um pedal para ativar seletivamente o conjunto de transdutor 12.
[00104] Os componentes supracitados e funcionalidades do instrumento 10 são meramente ilustrativos. O instrumento 10 pode ser configurado de diversas outras maneiras, conforme se tornará aparente para os versados na técnica, com base nos ensinamentos da presente invenção. Somente a título de exemplo, ao menos parte do instrumento 10 pode ser construída e/ou operável de acordo com ao menos alguns dos ensinamentos de qualquer um dos seguintes, cujas revelações estão todas incorporadas à presente invenção para fins de referência: patente US n° 5.322.055; patente US n° 5.873.873; patente US n° 5.980.510; patente US n° 6.325.811; patente US n° 6.783.524; publicação de patente US n° 2006/0079874; publicação de patente US n° 2007/0191713; publicação de patente US n° 2007/0282333;publicação de patente US n° 2008/0200940; publicação de patente US n° 2010/0069940; publicação de patente US n° 2011/0015660; publicação de patente US n° 2012/0112687; publicação de patente US n° 2012/0116265; pedido de patente US n° 13/538.588; e/ou pedido de patente US n° 13/657.553. Variações adicionais meramente ilustrativas do instrumento 10 serão descritas em mais detalhes abaixo. Deve-se entender que as variações descritas abaixo podem ser prontamente aplicadas ao instrumento 10 acima descrito e a quaisquer instrumentos referidos em qualquer uma das referências citadas na presente invenção, dentre outras.
[00105] Em alguns casos, o bloco de aperto 58 pode ser removido de modo indesejável a partir do braço de aperto 44. Por exemplo, um usuário pode tentar, de modo impróprio, remover um bloco de aperto 58 do braço de aperto 44. Portanto, pode ser desejável tornar mais difícil remover o bloco de aperto 58 do braço de aperto 44. Adicional ou alternativamente, pode haver outras razões para mudar a relação entre o bloco de aperto 58 e o braço de aperto 44, de modo que o bloco de aperto 58 seja preso ao braço de aperto 44 de uma maneira diferente daquela descrita acima. Várias relações alternativas exemplificadoras entre o bloco de aperto 58 e o braço de aperto 44 serão descritas em mais detalhes abaixo, enquanto ainda outras relações alternativas exemplificadoras serão evidentes para os versados na técnica em vista dos ensinamentos da presente invenção. Deve-se compreender que os exemplos abaixo podem ser prontamente incorporados ao instrumento 10, de modo que vários ensinamentos abaixo possam ser prontamente combinados com vários ensinamentos acima, como será evidente para os versados na técnica. A. Braço de Aperto Exemplificador com um Bloco de Aperto Moldado com Sobreposição
[00106] A Figura 7 mostra um braço de aperto exemplificador 144 que é similar ao braço de aperto 44, exceto pelo fato de que o braço de aperto 144 não inclui fendas 53a, 55a para receber um bloco de aperto 58. Em vez disso, um bloco de aperto 158 é preso ao braço de aperto 144 por meio de uma técnica de moldagem com sobreposição (Figuras 9 a 10). O braço de aperto 144 do presente exemplo inclui um par de extensões de montagem 156. Cada extensão 156 tem um respectivo pino 135 e abertura para pino 146. O braço de aperto 144 do presente exemplo é formado de alumínio. Entretanto, qualquer outro material ou combinação de materiais adequados pode ser usado para formar o braço de aperto 144.
[00107] A Figura 8 mostra um molde exemplificador 200 que pode ser usado para prender o bloco de aperto 158 com o braço de aperto 144 formando-se o bloco de aperto 158 no braço de aperto 144. O molde 200 inclui uma reentrância 234, um par de colunas de compensação 248, e um canal 246. A reentrância 234 é moldada para complementar o braço de aperto 144 ainda é dimensionada maior do que o braço de aperto 144. As colunas de compensação 248 são configuradas para suportar o braço de aperto 144 na reentrância 234 e fornecer um vão entre a superfície da reentrância 234 e a superfície externa do braço de aperto 144. O braço de aperto 144 é, então, colocado na reentrância 234 de modo que as extensões 156 na porção proximal do braço de aperto 144 sejam posicionadas nas extensões 256 na porção proximal do molde 200. As extensões 256 do molde 200 podem ser dimensionadas para engatar as extensões 156 do braço de aperto 144 para, desse modo, reter o braço de aperto 144 no local em relação ao molde 200. O braço de aperto 144 pode, então, ser confinado no molde 200. Por exemplo, uma outra placa de metal que tem qualquer configuração adequada pode ser colocada sobre o molde 200 para confinar o braço de aperto 144 no molde 200. Outros métodos adequados de confinamento do braço de aperto 144 no molde 200 serão evidentes para o versado na técnica em vista dos ensinamentos da presente invenção.
[00108] O canal 246 se estende transversalmente através de uma porção proximal da reentrância 234. O canal 246 pode estar em comunicação fluida com um fluxo de alimentação do jito. Um material de revestimento, como um politetrafluoroetileno (PTFE) e/ou outro(s) material(is), pode ser, então, introduzido no molde 200 através do canal 246. O material de revestimento introduzido preenche a reentrância 234 para, desse modo, revestir a posição distal do braço de aperto 144 para formar o bloco de aperto 158, conforme mostrado nas Figuras 9 a 10. À medida que o material de revestimento preenche a reentrância 234 proximalmente, o material de revestimento corre, então, através do canal oposto 246 e para fora do molde 200. Quando o material de revestimento correr para fora do canal de saída 246, as extensões 156 do braço de aperto 144 podem permanecer não revestidas. Dessa maneira, o bloco de aperto 158 é preso ao braço de aperto 144 através de ligação mecânica e térmica através de um processo de revestimento de etapa única. Conforme mostrado nas Figuras 9 a 10, o bloco de aperto 158 é moldado no braço de aperto 144 para abranger toda a posição distal do braço de aperto 144. Em outras versões, o bloco de aperto 158 pode cobrir porções selecionadas do braço de aperto 144, como a posição distal do braço de aperto 144 que é adjacente à lâmina 100. Outras áreas de revestimento selecionadas serão evidentes para o versado na técnica com base nos ensinamentos da presente invenção. Deve-se compreender também que vários tipos de recursos de superfície podem ser formados na região de contato de tecido 159 do bloco de aperto 158 através do processo de moldagem. Vários exemplos meramente ilustrativos de tais recursos de superfície são descritos em mais detalhes abaixo, enquanto outros exemplos serão evidentes para os versados na técnica em vista dos ensinamentos da presente invenção.
[00109] Quando o braço de aperto 144 for removido do molde 200, o braço de aperto 144 com o bloco de aperto moldado com sobreposição 158 pode, então, ser acoplado ao tubo interno 34 do conjunto de eixo 30 por meio de pinos integrados 135 do braço de aperto 144. O braço de aperto 144 com bloco de aperto moldado com sobreposição 158 também pode ser acoplado à bainha externa 32 do conjunto de eixo 30 colocando-se um pino 45 através das aberturas 146 no braço de aperto 144.
[00110] Em algumas versões, o braço de aperto 144 é acoplado ao tubo interno 34 por meio de um dispositivo de acoplamento adicional 260. A Figura 11 mostra um outro braço de aperto exemplificador 244 que é similar ao braço de aperto 144 em que o braço de aperto 244 compreende um bloco de aperto moldado com sobreposição 258. No entanto, o braço de aperto 244 desse exemplo compreende uma extensão proximal 242 que é configurada para ser inserida no dispositivo de acoplamento 260. No presente exemplo, o bloco de aperto 258 é moldado distalmente à extensão 242. Conforme mostrado nas Figuras 12 a 13, o dispositivo de acoplamento 260 compreende uma posição distal 261 e um par de extensões proximais 263. A porção distal 261 define uma abertura 266 que é configurada para receber a extensão 242 do braço de aperto 242. As extensões proximais 263 definem aberturas 264 que são usadas para montar o dispositivo de acoplamento 260 com o tubo interno 34 do instrumento 10.
[00111] A Figura 14 mostra o braço de aperto 244 montado com o dispositivo de acoplamento 260. A extensão 242 do braço de aperto 244 é inserida na abertura 266 do dispositivo de acoplamento 260. A abertura 266 pode ser dimensionada para fornecer um encaixe por atrito com o braço de aperto 244 para prender o braço de aperto 244 no lugar em relação ao dispositivo de acoplamento 260. O dispositivo de acoplamento 260 pode incluir adicionalmente um membro resiliente (não mostrado) que é resilientemente forçado para engatar a extensão 242 do braço de aperto 244 quando a extensão 242 for inserida no dispositivo de acoplamento 260. Consequentemente, uma ferramenta de auxílio pode ser usada para inserir e/ou remover o braço de aperto 244 com o dispositivo de acoplamento 260. Outros métodos adequados de prender o braço de aperto 244 no dispositivo de acoplamento 260 serão evidentes para um versado na técnica em vista dos ensinamentos da presente invenção. Conforme mostrado na Figura 14, a extremidade proximal do braço de aperto 244 engata as extensões 263 do dispositivo de acoplamento 260. O dispositivo de acoplamento 260 pode incluir pinos direcionados para dentro integrados, similares aos pinos 35, para prender de modo articulado o dispositivo de acoplamento 260 ao tubo interno 34. As extensões 263 podem ser acopladas à bainha externa 32 do instrumento 10 colocando-se o pino 45 através das aberturas 264 do dispositivo de acoplamento 260. O dispositivo de acoplamento 260 pode, portanto, permitir o aperto repetido pelo braço de aperto 244. Em algumas versões, o braço de aperto 244 e o bloco de aperto moldado com sobreposição 258 podem ser removidos do dispositivo de acoplamento 260 sem remover o dispositivo de acoplamento 260 do instrumento 10 para descartar separadamente o braço de aperto 244 e o bloco de aperto 258 após o uso. Outras configurações de acoplamento serão evidentes para o versado na técnica em vista dos ensinamentos da presente invenção.
[00112] A Figura 15 mostra um braço de aperto 344 que é semelhante ao braço de aperto 44, exceto pelo fato de que o braço de aperto 344 compreende uma pluralidade de abas direcionadas para dentro 348. As abas 348 se estendem para cima a partir do braço de aperto 344 e para dentro uma em direção à outra. Antes de as abas 348 serem inclinadas para dentro uma em direção à outra, um bloco de aperto 358, que é similar ao bloco de aperto 58, pode ser inseridono braço de aperto 344. As abas 348 podem ser, então, inclinadaspara dentro uma em direção à outra para reter o bloco de aperto 358 no braço de aperto 344. O braço de aperto 344 pode ser, então,acoplado ao tubo interno 34 e à bainha externa 32 conforme descrito acima em relação ao braço de aperto 44. Em adição ao fato de fornecer a retenção do bloco de aperto 358 no braço de aperto 344, as abas 348 podem ser adicionalmente usadas como dentes de preensão para ajudar na preensão do tecido entre o braço de aperto 344 e a lâmina ultrassônica 100.
[00113] Em algumas versões, o instrumento 10 pode ser operável para vedar o tecido aplicando-se energia de RF ao tecido. Um exemplo de um instrumento cirúrgico que é operável para vedar o tecido pela aplicação de energia de RF ao tecido é o dispositivo de vedação de tecido ENSEAL® da Ethicon Endo-Surgery, Inc., de Cincinnati, Ohio, EUA. Exemplos de tais dispositivos e conceitos relacionados são revelados na patente US n° 7.354.440, intitulada "Electrosurgical Instrument and Method of Use", concedida em 08 de abril de 2008, cuja revelação está incorporada na presente invenção a título de referência. As capacidades de aplicação de energia de RF do instrumento 10 podem ser fornecidas de acordo com pelo menos alguns dos ensinamentos da referência citada acima. Em versões do instrumento 10 que incluem as capacidades de aplicação de energia de RF, as abas 348 podem ser adicionalmente usadas como eletrodos de RF. Somente a título de exemplo, cada aba 348 pode ser usada como um eletrodo ativo discreto para a eletrocauterização por RF monopolar. Como um outro exemplo meramente ilustrativo, as abas 348 podem ser usadas em partes ou fornecer eletrocauterização por RF bipolar. Outras configurações e operabilidades adequadas para as abas 348 serão evidentes aos versados na técnica em vista dos ensinamentos da presente invenção.
[00114] As Figuras 16 mostram um conjunto de braço de aperto exemplificador 440 que incluem um braço de aperto 444, um transportador 460 e um bloco de aperto 458. Conforme mostrado na Figura 17, o braço de aperto 444 é similar ao braço de aperto 44, exceto pelo fato de que o braço de aperto 444 compreende uma pluralidade de fendas 448 que se estendem através da porção distal do braço de aperto 444. A Figura 18 mostra um transportador 460 que compreende extensões 462, paredes de retenção 464 e um canal 466. A pluralidade de extensões 464 se estende para fora do transportador 460 e é configurada para ser inserida nas fendas 448 do braço de aperto 444. As paredes 464 do transportador 460 se estendem para dentro para formar o canal 466, que se estende longitudinalmente através do transportador 460. O bloco de aperto 458 é configurado para ser inserido no canal 466 do transportador 460. Conforme se pode observar melhor na Figura 19, o bloco de aperto 458 compreende uma saliência 456 em cada lado do bloco de aperto 458 complementa e engata uma parede correspondente 464 do transportador 460.
[00115] Para formar o conjunto de braço de aperto 440 conforme mostrado nas Figuras 20 a 21, o bloco de aperto 458 é inserido no canal 466 de transportador 460. As paredes 464 do transportador 464 engatam as saliências 456 do bloco de aperto 458 para manter o bloco de aperto 458 no transportador 460. Uma porção do bloco de aperto 458 se estende além do transportador 460, passa as paredes 464, para engatar a lâmina ultrassônica 100 ou o tecido contra a lâmina ultrassônica 100. Com o bloco de aperto 458 inserido no transportador 460, o transportador 460 é, então, inserido no braço de aperto 444 de modo que as extensões 462 do transportador 460 sejam posicionadas dentro de fendas 448 do braço de aperto 444. No presente exemplo, as extensões 462 se estendem além do braço de aperto da superfície externa 444. As porções expostas das extensões 462 são adicionalmente presas ao braço de aperto 444 com o uso de um adesivo, estaqueamento térmico, estaqueamento ultrassônico e/ou qualquer outra técnica adequada, conforme será evidente aos versados na técnica em vista dos ensinamentos da presente invenção. As extensões 462 prendem, desse modo, o transportador 460 em relação ao braço de aperto 444. Em algumas outras versões, as extensões 462 são embutidas no braço de aperto 444. Uma vez que o transportador 460 é preso ao braço de aperto 444, o conjunto de braço de aperto 440 pode, então, ser acoplado ao tubo externo 32 do conjunto de eixo 30 colocando-se o pino 45 através de aberturas 446 no braço de aperto 444. O braço de aperto 444 pode incluir pinos direcionados para dentro integrados, similares aos pinos 35, para prender de modo articulado o braço de aperto 444 ao tubo interno 34. Outras configurações de acoplamento serão evidentes para o versado na técnica em vista dos ensinamentos da presente invenção.
[00116] A Figura 22 mostra um outro braço de aperto exemplificador 544 que é similar ao braço de aperto 44, exceto pelo fato de que o braço de aperto 544 desse exemplo compreende uma pluralidade de barbelas 560 que se estendem para fora de uma parede interna 548 do braço de aperto 544. Embora as barbelas 560 sejam mostradas na Figura 22 como estendendo-se a partir de uma superfície de fundo do braço de aperto 544, as barbelas 560 podem se estender a partir de qualquer superfície interna do braço de aperto 544. As barbelas 560 podem ser formadas na parede interna 548 do braço de aperto 544 através de qualquer processo adequado, como usinagem, formação, moldagem, crescimento, um processo MEMS, etc. Conforme se pode observar melhor na Figura 24, cada barbela 560 compreende uma protuberância 562 que se projeta para fora da barbela 560. As barbelas 560 podem, portanto, engatar o bloco de aperto 558 para prender o bloco de aperto 558 em relação ao braço de aperto 544. A Figura 23 mostra uma versão do bloco de aperto 558 que define uma pluralidade de aberturas 556 que corresponde às barbelas 560. Consequentemente, o bloco de aperto 558 é inserido no braço de aperto 544 de modo que as barbelas 560 sejam posicionadas nas aberturas 556 do bloco de aperto 558, conforme mostrado na Figura 24.
[00117] Em algumas versões, as aberturas 556 são omitidas do bloco de aperto 558 de modo que as barbelas 560 sejam direcionadas através e para uma superfície exterior do bloco de aperto 558. O bloco de aperto 558 pode ser pressionado sobre as barbelas 560 sem preaquecer o bloco de aperto 558. Alternativamente, o bloco de aperto 558 e/ou o braço de aperto 544 podem ser preaquecidos para auxiliar na formação do bloco de aperto 558 ao redor das barbelas 560. Em algumas variações, as barbelas 560 são substituídas por nanopregos em formato de T. Outras configurações adequadas para as barbelas 560 serão evidentes aos versados na técnica em vista dos ensinamentos da presente invenção. Uma vez que o bloco de aperto 558 é preso ao braço de aperto 544, o braço de aperto 544 pode, então, ser acoplado ao tubo externo 32 do conjunto de eixo 30 colocando-se o pino 45 através de aberturas 546 no braço de aperto 544. O braço de aperto 544 pode incluir pinos direcionados para dentro integrados, similares aos pinos 35, para prender de modo articulado o braço de aperto 544 ao tubo interno 34. Outras configurações de acoplamento serão evidentes para o versado na técnica em vista dos ensinamentos da presente invenção.
[00118] As Figuras 25 a 26 mostram um outro braço de aperto exemplificador 644 que é similar ao braço de aperto 44, exceto pelo fato de que o braço de aperto 644 desse exemplo compreende uma pluralidade de sulcos 648 que se estendem lateralmente através do braço de aperto 644. Conforme se pode observar melhor na Figura 26, os sulcos 648 se estendem em um ângulo oblíquo através do braço de aperto 644 para alongar a área de retenção. Embora os sulcos 648 se estendam em ângulos oblíquos em relação ao eixo longitudinal do braço de aperto 644 nesse exemplo, os sulcos 648 se estendem ao longo de trajetórias que são paralelas uma à outra. Em algumas outras versões, os sulcos 648 se estendem através do braço de aperto 644 ao longo das respectivas trajetórias que são perpendiculares ao eixo longitudinal do braço de aperto 644. Os sulcos 648 são configurados para receber protuberâncias complementares 656 do bloco de aperto 658. O bloco de aperto 658 é similar ao bloco de aperto 58, exceto pelo fato de que as protuberâncias 656 se estendem para fora do bloco de aperto 658 ao longo de trajetórias que são oblíquas ao eixo longitudinal do bloco de aperto 658. No presente exemplo, as protuberâncias 656 e os sulcos 648 têm uma configuração de cauda de andorinha para reter protuberâncias 656 nos sulcos 648. Logicamente, outras configurações adequadas ficarão evidentes ao versado na técnica, em vista dos ensinamentos da presente invenção. Consequentemente, o bloco de aperto 658 é inserido no braço de aperto 644 de modo que os sulcos 648 do braço de aperto 644 recebam protuberâncias 656 do bloco de aperto 658 para, desse modo, reter o bloco de aperto 658 em relação ao braço de aperto 644, conforme mostrado na Figura 25.
[00119] Uma vez que o bloco de aperto 658 é preso ao braço de aperto 644, o braço de aperto 644 pode, então, ser acoplado ao tubo externo 32 do conjunto de eixo 30 colocando-se o pino 45 através de aberturas 646 no braço de aperto 644. O braço de aperto 644 pode incluir pinos direcionados para dentro integrados, similares aos pinos 35, para prender de modo articulado o braço de aperto 644 ao tubo interno 34. Outras configurações de acoplamento serão evidentes para o versado na técnica em vista dos ensinamentos da presente invenção.
[00120] As Figuras 27A a 27B mostram um outro braço de aperto exemplificador 744 para uso com o instrumento 10. O braço de aperto 744 é similar ao braço de aperto 44 em que o braço de aperto 744 inclui uma fenda em formato de T distal 749 e uma fenda em formato de cunha proximal ou em formato de cauda de andorinha 747. A fenda em formato de T 749 é similar à fenda em formato de T 53a do braço de aperto 44 e a fenda em formato de cunha 747 é similar à fenda em formato de cunha 55a do braço de aperto 44. No entanto, conforme mostrado na Figura 27A, a fenda em formato de T 749 do braço de aperto 744 se estende distalmente mais longa do que a fenda em formato de T 53a do braço de aperto 44. Consequentemente, a fenda em formato de cunha 747 do presente exemplo é mais curta do que a fenda em formato de cunha 55a do braço de aperto 44. Isso pode ajudar a reter um bloco de aperto 58 no braço de aperto 744. Conforme mostrado na Figura 27B, o braço de aperto 744 compreende uma posição distal 745 com a fenda em formato de T 749 e uma porção proximal 743 com a fenda em formato de cunha 747. Isso pode permitir a usinagem do braço de aperto 744 de tal modo que a posição distal 745 seja montada com a porção proximal 743 após as peças serem usinadas. Logicamente, o braço de aperto 744 pode ser formado a partir de uma peça integrada. Outras configurações de fendas adequadas 747, 749 serão evidentes para o versado na técnica com base nos ensinamentos da presente invenção.
[00121] Uma vez que um bloco de aperto 58 é preso ao braço de aperto 744, o braço de aperto 744 pode, então, ser acoplado ao tubo externo 32 do conjunto de eixo 30 colocando-se o pino 45 através de aberturas 746 no braço de aperto 744. O braço de aperto 744 pode incluir pinos direcionados para dentro integrados, similares aos pinos 35, para prender de modo articulado o braço de aperto 744 ao tubo interno 34. Outras configurações de acoplamento serão evidentes para o versado na técnica em vista dos ensinamentos da presente invenção.
[00122] As Figuras 28 e 30 mostram um outro braço de aperto exemplificador 844 que é similar ao braço de aperto 44, exceto pelo fato de que o braço de aperto 844 desses exemplos compreende canais laterais 842 que se estendem longitudinalmente no braço de aperto 844. Os canais 842 são configurados para receber protuberâncias 856 de um bloco de aperto 858. Conforme se pode observar melhor na Figura 29, o bloco de aperto 858 é similar ao bloco de aperto 58, exceto pelo fato de que o bloco de aperto 858 compreende uma pluralidade de protuberâncias 856 que se estende para fora do bloco de aperto 858 sob a forma de trilhos. As protuberâncias 856 são configuradas para serem inseridas nos canais 842 do braço de aperto 844 para, desse modo, manter o bloco de aperto 858 no braço de aperto 844, conforme mostrado na Figura 28. No presente exemplo, o bloco de aperto 858 define reentrâncias 854 entre protuberâncias 856 do bloco de aperto 858. Os canais 842 do braço de aperto 844 podem incluir protuberâncias correspondentes que se inserem nas reentrâncias 854 do bloco de aperto 858 para prender, adicionalmente, o bloco de aperto 858 com o braço de aperto 844. Outras configurações de canal 842 e de protuberância 856 adequadas serão evidentes para o versado na técnica com base nos ensinamentos da presente invenção.
[00123] Uma vez que o bloco de aperto 858 é preso ao braço de aperto 844, o braço de aperto 844 pode, então, ser acoplado ao tubo externo 32 do conjunto de eixo 30 colocando-se o pino 45 através de aberturas, similares às aberturas 46, no braço de aperto 844. O braço de aperto 844 pode incluir pinos direcionados para dentro integrados, similares aos pinos 35, para prender de modo articulado o braço de aperto 844 ao tubo interno 34. Outras configurações de acoplamento serão evidentes para o versado na técnica em vista dos ensinamentos da presente invenção.
[00124] A Figura 31 mostra um braço de aperto 944 que é similar ao braço de aperto 44, exceto pelo fato de que o braço de aperto 944 define uma abertura transversal 942 que é configurada para receber um pino de retenção 960. No presente exemplo, o braço de aperto 944 é acoplado ao bloco de aperto 958. O bloco de aperto 958 é similar ao bloco de aperto 58, exceto pelo fato de que o bloco de aperto 958 define uma indentação 956 que é configurada para receber o pino 960. Consequentemente, o bloco de aperto 958 é acoplado ao braço de aperto 944 de tal modo que a abertura 942 do braço de aperto 944 seja alinhada à indentação 956 do bloco de aperto 958. O pino 960 pode, então, ser inserido através da abertura 942 e na indentação 956, conforme mostrado na Figura 31. O pino 960 pode ser mantido na abertura 942 do braço de aperto 944 por um encaixe de interferência com a abertura 942, ou o pino 960 pode ser soldado no lugar, ou o pino 960 pode ser preso no braço de aperto 944 de qualquer outra maneira adequada. Outros métodos adequados para prender o pino 960 com a abertura 942 do braço de aperto 944 serão evidentes para um versado na técnica em vista dos ensinamentos da presente invenção. O pino 960 pode fazer interface com o bloco de aperto 958 pressionando-se o bloco de aperto 985 na direção oposta ao braço de aperto 944 acionando, desse modo, um trilho do tipo cauda de andorinha, trilho em formato de T, ou outro tipo de trilho contra as superfícies internas de um canal complementar no braço de aperto 944 para travar o bloco de aperto 985 no lugar através de atrito. Adicional ou alternativamente, o pino 960 pode fornecer um batente positivo proximal ao bloco de aperto 958 de modo que o pino 960 impeça que o bloco de aperto 985 deslize proximalmente em relação ao braço de aperto 944. Um chanfro distal 954 do braço de aperto 944 pode impedir que o bloco de aperto 985 deslize distalmente em relação ao braço de aperto 944, de modo que o bloco de aperto 985 seja capturado longitudinalmente entre o chanfro distal 954 e o pino 960.
[00125] Embora a indentação 956 engate apenas na posição distal do fundo do pino 960 no presente exemplo, a indentação 956 pode, em vez disso, ser formada como uma abertura para confinar completamente o pino 960 no bloco de aperto 958. Isso podeadicionalmente impedir que o bloco de aperto 958 se movadistalmente em relação ao braço de aperto 944. Outras relações adequadas entre o pino 960 e o bloco de aperto 958 serão evidentes para os versados na técnica em vista dos ensinamentos da presente invenção. Similarmente, outras configurações adequadas para o pino 960 e o bloco de aperto 958 serão evidentes para os versados na técnica em vista dos ensinamentos da presente invenção.
[00126] Uma vez que o bloco de aperto 958 é preso ao braço de aperto 944, o braço de aperto 944 pode, então, ser acoplado ao tubo externo 32 do conjunto de eixo 30 colocando-se o pino 45 através de aberturas 946 no braço de aperto 944. O braço de aperto 944 pode incluir pinos direcionados para dentro integrados, similares aos pinos 35, para prender de modo articulado o braço de aperto 944 ao tubo interno 34. Outras configurações de acoplamento serão evidentes para o versado na técnica em vista dos ensinamentos da presente invenção.
[00127] Em alguns casos, o mesmo pode ser desejável incluir recursos de preensão no bloco de aperto 58, no braço de aperto 44 e/ou na lâmina 100 que facilita a preensão do tecido entre o bloco de aperto 58 e a lâmina 100. Tais recursos de preensão de tecido podem, desse modo, aprimorar a vedação e/ou o corte do tecido entre o bloco de aperto 58 e a lâmina 100. Adicional ou alternativamente, tais recursos de preensão podem impedir a migração de tecido entre o bloco de aperto 58 e a lâmina 100 enquanto a lâmina 100 é ultrassonicamente ativada. Diversos recursos de preensão exemplificadores que podem ser incorporados no bloco de aperto 58 são discutidos em mais detalhes abaixo, enquanto diversos outros exemplos serão evidentes aos versados na técnica em vista dos ensinamentos da presente invenção.
[00128] A Figura 32 mostra um bloco de aperto alternativo exemplificador 1058 que é similar ao bloco de aperto 58, exceto pelo fato de que o bloco de aperto 1058 desse exemplo compreende uma pluralidade de sulcos 1056 que se estende através de uma superfície exterior do bloco de aperto 1058. Os sulcos 1056 podem ser posicionados adjacentes à lâmina 100 (e/ou tecido) quando o bloco de aperto 1058 for montado no braço de aperto 44 do instrumento 10 de tal modo que os sulcos 1056 atuem para auxiliar a preensão do tecido entre o bloco de aperto 1058 e a lâmina 100. No presente exemplo, os sulcos 1056 se estendem transversalmente através do bloco de aperto 1058, ao longo de trajetórias que são perpendiculares ao eixo longitudinal do bloco de aperto 1058. Alternativamente, os sulcos 1056 podem se estender através do bloco de aperto 1058 em ângulos variados. Por exemplo, a Figura 33 mostra um bloco de aperto 1158 que é similar ao bloco de aperto 1058, exceto pelo fato de que o bloco de aperto 1158 inclui sulcos 1154, 1156 que se estendemobliquamente através de uma superfície exterior do bloco de aperto 1158. Em particular, um conjunto de sulcos paralelos 1154 é posicionado em um primeiro ângulo oblíquo e um outro conjunto de sulcos paralelos 1156 é posicionado em um segundo ângulo oblíquo, de modo que os sulcos 1156 formem um padrão reticulado com sulcos 1154. Consequentemente, os sulcos 1154, 1156 podem atuar como uma fila contra o tecido posicionado entre o bloco de aperto 1158 e a lâmina 100 quando a lâmina 100 for ultrassonicamente ativada.
[00129] Os sulcos 1154, 1156 podem ser usinados no bloco deaperto 1158 com o uso de uma operação de dois passos e/ou com o uso de qualquer técnica adequada. Outras configurações e disposições adequadas para os sulcos 1056, 1154, 1156 serãoevidentes aos versados na técnica em vista dos ensinamentos da presente invenção. Deve-se também compreender que os sulcos 1056, 1154, 1156 podem ser substituídos por cristas. Conforme ainda outra alternativa meramente ilustrativa, os sulcos 1056, 1154, 1156 podem ser complementados com cristas (por exemplo, uma crista que se estende ao longo de um ou mais contornos de sulcos 1056, 1154, 1156, etc.).
[00130] As Figuras 34 e 35 mostram um bloco de aperto alternativo exemplificador 1258 que é similar ao bloco de aperto 58, exceto pelo fato de que o bloco de aperto 1258 desse exemplo compreende cerdas 1256 que se estendem para fora através do bloco de aperto 1258. As cerdas 1256 podem ser posicionadas adjacentes à lâmina 100 e/ou tecido quando o bloco de aperto 1258 for montado no braço de aperto 44 do instrumento 10 de tal modo que as cerdas 1256 atuem para auxiliar a preensão do tecido entre o bloco de aperto 1258 e a lâmina 100. As cerdas 1256 podem ser formadas a partir de um material rígido ou maleável. Conforme se pode observar melhor na Figura 35, as cerdas 1256 se estendem a partir do bloco de aperto 1258 até uma altura igual. Alternativamente, as cerdas 1256 podem se estender a partir do bloco de aperto 1058 em alturas variadas. Por exemplo, a Figura 36 mostra um bloco de aperto 1358 que é similar ao bloco de aperto 1258, exceto pelo fato de que o bloco de aperto 1358 inclui cerdas 1154, 1356 que se estendem em alturas variantes a partir do bloco de aperto 1358. Embora as cerdas 1256, 1356 sejammostradas para serem lateral e longitudinalmente alinhadas entre si, as cerdas 1256, 1356 também podem ser desalinhadas na direção lateral e/ou longitudinal no bloco de aperto 1258, 1358. Adicional ou alternativamente, as cerdas 1256, 1356 podem se estender em ângulos oblíquos a partir do bloco de aperto 1258, 1358. Outras configurações e disposições adequadas para as cerdas 1256, 1356 serão evidentes aos versados na técnica em vista dos ensinamentos da presente invenção.
[00131] Conforme notado acima, a posição distal 58A do bloco deaperto 58 inclui dentes que têm uma configuração do tipo dente de serra, em que os dentes se estendem ao longo de trajetórias que são perpendiculares ao eixo longitudinal do bloco de aperto 58. Alternativamente, os dentes em um bloco de aperto 58 podem ter várias outras configurações que podem promover adicionalmente a preensão do tecido pelo bloco de aperto 58. Por exemplo, a Figura 37 mostra um bloco de aperto 1458 que compreende uma pluralidade de dentes 1456 que se estendem transversalmente através de uma superfície exterior do bloco de aperto 1458, de modo que as cristas de dentes 1456 se estendam ao longo de trajetórias que são anguladas obliquamente em relação ao eixo longitudinal do bloco de aperto 1458. Os dentes 1456 se projetam para fora do bloco de aperto 1458 e podem ser posicionados adjacentes à lâmina 100 e ao tecido para auxiliar na preensão do tecido entre o bloco de aperto 1458 e a lâmina 100. Logicamente, os dentes 1456 podem incluir outras configurações. Por exemplo, a Figura 38 mostra um bloco de aperto 1558 que é similar ao bloco de aperto 1458, exceto pelo fato de que o bloco de aperto 1558 compreende uma pluralidade de dentes 1556 em uma configuração em forma de V que aponta em uma direção proximal. Os dentes 1556 também podem apontar na direção oposta. Por exemplo, a Figura 39 mostra um bloco de aperto 1658 que é similar ao bloco de aperto 1558, exceto pelo fato de que os dentes 1656 do bloco de aperto 1658 incluem uma configuração em forma de V que aponta em uma direção distal. Alternativamente, a Figura 40 mostra um bloco de aperto 1758 que é similar ao bloco de aperto 1558, exceto pelo fato de que o bloco de aperto 1758 inclui dentes 1756 em uma configuração semicircular que aponta em uma direção proximal. Logicamente, os dentes 1756 também podem apontar na direção oposta. Por exemplo, a Figura 41 mostra um bloco de aperto 1858 que é similar ao bloco de aperto 1758, exceto pelo fato de que os dentes 1856 do bloco de aperto 1858 incluem uma configuração semicircular que aponta em uma direção distal. Ainda outras configurações de dente adequadas serão evidentes para o versado na técnica em vista dos ensinamentos da presente invenção.
[00132] As Figuras 42 a 43 mostram um bloco de aperto 1958 que compreende dentes com dois níveis 1954, 1956. No presenteexemplo, o bloco de aperto 1958 compreende uma primeira fileira de dentes 1956 que se estende longitudinalmente ao longo de uma porção central do bloco de aperto 1958. Uma segunda e uma terceira fileiras de dentes 1954 são posicionadas lateralmente ao longo de cada lado da primeira fileira de dentes 1956. As segundas fileiras de dentes 1954 se estendem até uma altura diferente da primeira fileira de dentes 1956. Conforme se pode observar melhor na Figura 43, os dentes 1954 são posicionados abaixo dos dentes 1956. Logicamente, os dentes 1954 podem ser alternativamente posicionados acima dos dentes 1956. Os dentes 1954, 1956 podem, portanto, ser posicionados adjacentes à lâmina 100 e ao tecido para auxiliar na preensão do tecido entre o bloco de aperto 1958 e a lâmina 100. Em algumas versões, os dentes 1954 são configurados diferentemente a partir dos dentes 1956, em adição ou como uma alternativa aos dentes 1954 que se estendem até uma altura diferente dos dentes 1956. Somente a título de exemplo, os dentes 1954 podem ter uma configuração de dente de serra que é orientada proximalmente enquanto os dentes 1956 têm uma configuração de dente de serra que é orientada distalmente; ou vice-versa. Outras configurações adequadas que podem ser usadas para os dentes 1954, 1956, assim como outras relações adequadas entre os dentes 1954, 1956, serão evidentes os versados na técnica em vista dos ensinamentos da presente invenção. D. Braço de Aperto em Formato de U Exemplificador
[00133] Em alguns casos, o mesmo pode ser desejável para fornecer o braço de aperto 44 com capacidades de preensão de tecido sem ter um recurso como o bloco de aperto 58. Por exemplo, as Figuras 44 a 46 mostram um atuador de extremidade 240 que é similar ao atuador de extremidade 40, exceto pelo fato de que o atuador de extremidade 240 compreende um braço de aperto 2044 com uma configuração em formato de U. Um braço articulado 2048 que prende de modo articulado o braço de aperto 2044 ao conjunto de eixo 30 e define um ângulo agudo com o braço de aperto 2044. Conforme se pode observar melhor na Figura 44, o braço de aperto 2044 é configurado para se enrolar ao redor dos lados laterais e da extremidade distal da lâmina 2000. O braço de aperto 2044 éadicionalmente configurado para percorrer passando a lâmina 2000 quando o braço de aperto 2044 se articula a partir de uma posição aberta para uma posição fechada. Em outras palavras, a posição distal do braço de aperto 2044 atravessa o eixo longitudinal da lâmina 2000, a partir de um lado do eixo longitudinal da lâmina 2000 para o outro lado do eixo longitudinal da lâmina 2000, à medida que o braço de aperto 2044 se articula de uma posição aberta para uma posição fechada.
[00134] A Figura 45A mostra o braço de aperto 2044 na posiçãoaberta em relação à lâmina 2000. Na posição aberta, o tecido pode ser posicionado entre o braço de aperto 2044 e a lâmina 2000. O gatilho 28 pode, então, ser atuado para articular o braço de aperto 2044 para a posição fechada mostrada na Figura 45B. O braço de aperto 2044 se articula ao redor do pino 2046 para percorrer através do eixo longitudinal da lâmina 2000 e passando a lâmina 2000. Isso captura o tecido 2 entre o braço de aperto 2044 e a lâmina 2000 para, desse modo, puxar o tecido 2 sobre a lâmina 2000, conforme mostrado na Figura 46. Isso pode permitir que a lâmina 2000 vede e/ou corte o tecido 2 em uma quantidade de vezes diminuída. Adicional ou alternativamente, o braço de aperto 2044 pode fornecer uma ação de cisalhamento no tecido em ambos os lados da lâmina 200. O braço de aperto 2044 pode permitir, adicionalmente, a hemóstase avançada sem pressão no lado de topo do tecido 2. Outras configurações e operabilidades adequadas para os braços de aperto 2044 serão evidentes aos versados na técnica em vista dos ensinamentos da presente invenção.
[00135] Em algumas versões do instrumento 10, o braço de aperto 44 e a lâmina 100 são, ambos, curvos ao longo dos respectivos planos que são perpendiculares ao plano ao longo do qual o braço de aperto se articula 44. Em algumas outras versões, o braço de aperto 44 e/ou a lâmina 100 é/são curvo(s) ao longo de um plano ou de planos que é/são paralelo(s) ao plano ao longo do qual o braço de aperto 44 se articula. Por exemplo, as Figuras 47A a 47B mostram um atuador de extremidade 340 que é similar ao atuador de extremidade 40, exceto pelo fato de que o atuador de extremidade 340 compreende uma lâmina 2100 e o braço de aperto 2144 com o bloco de aperto 2158 que são, todos, verticalmente curvos ao longo de um plano em linha com o movimento de articulação do braço de aperto 2144. A Figura 48 mostra uma vista de topo do atuador de extremidade 340, que ilustra que a curvatura do braço de aperto 2144 é formada tal modo que tanto o braço de aperto 2144 como a lâmina 2100 se estendam longitudinalmente ao longo dos planos que são alinhados ao o eixo longitudinal do conjunto de eixo 30. Com referência novamente às Figuras 47A a 47B, a lâmina 2100 do atuador de extremidade 340 é curva para corresponder ao braço de aperto 2144 e ao bloco de aperto 2158. A curva da lâmina 2100, do braço de aperto 2144, e do bloco de aperto 2158 pode possibilitar que o braço de aperto 2144 apreenda melhor o tecido entre a lâmina 2100 e o bloco de aperto 2158.
[00136] A Figura 47A mostra o braço de aperto 2144 na posiçãoaberta em relação à lâmina 2100. Na posição aberta, o tecido pode ser posicionado entre o bloco de aperto 2158 e a lâmina 2100. O gatilho 28 pode, então, ser atuado para articular o braço de aperto 2144 para a posição fechada mostrada na Figura 47B. O braço de aperto 2144 se articula ao redor do pino 2146 para se mover em direção à lâmina 2100. As curvaturas correspondentes do braço de aperto 2144, do bloco de aperto 2158 e da lâmina 2100 agem para capturar o tecido entre o bloco de aperto 2158 e a lâmina 2100 para, desse modo, vedar e/ou cortar o tecido. Nesse exemplo, o braço de aperto 2144 e o bloco de aperto 2158 são curvados convexamente em relação à região de captura de tecido entre o bloco de aperto 2158 e a lâmina 2100; enquanto a lâmina 2100 é curvada concavamente em relação à região de captura de tecido entre o bloco de aperto 2158 e a lâmina 2100.
[00137] A curvatura do atuador de extremidade 340 pode fornecer ao usuário um tipo de visibilidade que difere da visibilidade fornecida pelo atuador de extremidade 40. A curvatura do braço de aperto 2144 pode fornecer, adicionalmente, uma forma diferente de dissecção de tecido em relação ao atuador de extremidade 40. Por exemplo, a porção de topo do braço de aperto 2144 pode ser pressionada contra o tecido e puxada proximalmente. A curva do braço de aperto 2144 pode reter o tecido contra o braço de aperto 2144 para, desse modo, dissecar com ponta romba o tecido à medida que o braço de aperto 2144 é puxado proximalmente. Logicamente outras configurações de braço de aperto adequadas 2144 ficarão evidentes ao versado na técnica, em vista dos ensinamentos da presente invenção.
[00138] As Figuras 49A a 49B mostram um outro atuador de extremidade exemplificador 440 que é similar ao atuador de extremidade 340, exceto pelo fato de que o braço de aperto 2244, o bloco de aperto 2258 e a lâmina 2200 são curvados concavamente para fornecer uma vista alternativa da visibilidade em relação ao atuador de extremidade 340. Em particular, o braço de aperto 2244 e o bloco de aperto 2258 são curvados concavamente em relação à região de captura de tecido entre o bloco de aperto 2258 e a lâmina 2200; enquanto a lâmina 2200 é curvada convexamente em relação à região de captura de tecido entre o bloco de aperto 2258 e a lâmina 2200. A Figura 49A mostra o braço de aperto 2244 na posição aberta em relação à lâmina 2200. Na posição aberta, o tecido pode ser posicionado entre o bloco de aperto 2258 e a lâmina 2200. O gatilho 28 pode, então, ser atuado para articular o braço de aperto 2244 para a posição fechada mostrada na Figura 49B. O braço de aperto 2244 se articula ao redor do pino 2246 para se mover em direção à lâmina 2200. As curvaturas correspondentes do braço de aperto 2244, do bloco de aperto 2258 e da lâmina 2200 agem para capturar o tecido entre o bloco de aperto 2258 e a lâmina 2200 para, desse modo, vedar e/ou cortar o tecido.
[00139] As Figuras 50A a 50B mostram um atuador de extremidade 540 que é similar ao atuador de extremidade 340 em que a lâmina 2300 é curvada concavamente em relação à região de captura de tecido entre o aperto de um bloco de aperto 2358 e a lâmina 2300. Nesse exemplo, no entanto, o braço de aperto 2344 e o bloco de aperto 2358 têm uma configuração reta e são formados de um material maleável. Em particular, o braço de aperto 2344 e o bloco de aperto 2358 são resilientemente forçados para terem uma configuração reta conforme mostrado na Figura 50A, que representa o atuador de extremidade 540 em uma configuração aberta. Nesse estado, o tecido pode ser posicionado entre o braço de aperto 2344 e a lâmina 2300. O gatilho 28 pode, então, ser atuado para articular o braço de aperto 2344 para a posição fechada mostrada na Figura 50B. O braço de aperto 2344 se articula ao redor do pino 2346 para se mover em direção à lâmina 2300. À medida que o braço de aperto 2344 se articula para a posição fechada, o braço de aperto 2344 e o bloco de aperto 2358 se inclinam para corresponder ao formato da lâmina 2300. A extremidade distal do bloco de aperto 2358 pode entrar em contato com a lâmina ou o tecido primeiro, seguido pela região proximal do bloco de aperto 238 à medida que o braço de aperto 2344 é articulado em direção à posição fechada.
[00140] As curvaturas correspondentes do braço de aperto 2344, do bloco de aperto 2358 e da lâmina 2300 podem atuar para apreender melhor o tecido entre o bloco de aperto 2358 e a lâmina 2300 para, desse modo, vedar e/ou cortar o tecido. Utilizando-se de um braço de aperto maleável 2344, a dureza da lâmina 2300 pode ser aumentada e o perfil de pressão entre o bloco de aperto 2358 e a lâmina 2300 pode ser otimizado para, desse modo, apreender, vedar e/ou cortar o tecido. Um braço de aperto maleável 2344 pode compensar adicionalmente as variações de fabricação entre as partes do atuador de extremidade 540. Embora o presente exemplo mostre o braço de aperto 2344 se inclinando convexamente para se conformar ao formato da lâmina 2300, outras configurações maleáveis adequadas para o braço de aperto 2344 serão evidentes os versados na técnica em vista dos ensinamentos da presente invenção.
[00141] As Figuras 51A a 51B mostram um braço de aperto alternativo exemplificador 2444 que se inclina para uma configuração esticada contra a lâmina 2400. O braço de aperto 2444 e o bloco de aperto 2458 desse exemplo são similares ao braço de aperto 2344 e ao bloco de aperto 2358, exceto pelo fato de que o braço de aperto 2444 e o bloco de aperto 2458 são curvados concavamente em relação à região de captura de tecido entre o aperto de um bloco de aperto 2458 e a lâmina 2400 quando o braço de aperto 2444 estiver em uma posição aberta (Figura 51A). O braço de aperto 2444 e o bloco de aperto 2458 podem ser resilientemente forçados para assumir essa curva. A lâmina 2400 é similar à lâmina 2300, exceto pelo fato de que a lâmina 2400 tem uma configuração reta, de modo que a lâmina 2400 se estenda ao longo de um eixo que é paralelo ao eixo longitudinal do conjunto de eixo 30.
[00142] O tecido pode ser posicionado entre o braço de aperto 2444 e a lâmina 2400 nessa posição aberta conforme mostrado na Figura 51A. O gatilho 28 pode, então, ser atuado para articular o braço de aperto 2444 para a posição fechada mostrada na Figura 51B. O braço de aperto 2444 se articula ao redor do pino 2446 para se mover em direção à lâmina 2400. À medida que o braço de aperto 2444 se articula para a posição fechada, o braço de aperto 2444 e o bloco de aperto 2458 se inclinam para corresponder à configuração reta da lâmina 2400. Os formatos correspondentes do braço de aperto 2444, do bloco de aperto 2458 e da lâmina 2400 podem atuar para apreender melhor o tecido entre o bloco de aperto 2458 e a lâmina 2400 para, desse modo, vedar e/ou cortar o tecido.
[00143] Para ser maleável, o dorso 2448 do braço de aperto 2444 pode ser formado a partir de um material maleável para se flexionar com a lâmina 2400, enquanto a posição distal do braço de aperto 2444 pode ser mais rígida do que o dorso 2448. O dorso 2448 pode permitir que o braço de aperto 2444 se aplaine e forneça fechamento tanto entre a porção distal quanto a porção proximal do braço de aperto 2444 com a lâmina 2400. Logicamente, outras configurações maleáveis ficarão evidentes ao versado na técnica. Por exemplo, a Figura 52 mostra um braço de aperto 2544 que é similar ao braço de aperto 2444, exceto pelo fato de que o braço de aperto 2544 compreende um bloco de aperto moldado com sobreposição 2558. Para permitir que o bloco de aperto 2558 se flexione com o braço de aperto 2544, o bloco de aperto 2558 define reentrâncias 2556 no molde com sobreposição. Embora quatro reentrâncias 2556 sejam mostradas na Figura 52, apenas outra quantidade adequada de reentrâncias 2556 pode ser usada para permitir a flexão suficiente do bloco de aperto moldado com sobreposição 2558. Consequentemente, as reentrâncias 2556 podem se flexionar para uma configuração mais ampla quando o braço de aperto 2544 se flexionar para a posição fechada contra a lâmina 2400 para, desse modo, permitir que o bloco de aperto 2558 se flexione com o braço de aperto 2544.
[00144] A Figura 53 mostra um braço de aperto exemplificador 2644 que compreende uma porção de espuma maleável 2642. O braço de aperto 2644 é similar ao braço de aperto 2444, exceto pelo fato de que o braço de aperto 2644 inclui uma reentrância 2647 e um membro de bloco 2648. A porção de espuma 2642 é posicionada na reentrância 2647 do braço de aperto 2644. O membro de bloco 2648 é interposto entre o bloco de aperto 2658 e a porção de espuma 2642. A porção de espuma 2642 é resilientemente forçada para assumir uma configuração expandida, de modo que a porção de espuma 2642 impulsione o bloco de aperto 2658 na direção oposta ao braço de aperto 2444. Quando o tecido não está sendo comprimido entre o bloco de aperto 2658 e a lâmina ultrassônica 100, um vão 2645 é definido entre o braço de aperto 2444 e o bloco de aperto 2658 devido à força resiliente imposta pela porção de espuma 2642. Entretanto, quando o tecido for comprimido entre o bloco de aperto 2658 e a lâmina ultrassônica 100, a porção de espuma 2648 também se comprime, reduzindo o tamanho do vão 2645 ou até mesmo eliminando o vão 2645. Em alguns casos, o tecido entre o bloco de aperto 2658 e a lâmina ultrassônica 100 não se estende ao longo do comprimento total do bloco de aperto 2658 e da lâmina ultrassônica 100. A maleabilidade na porção de espuma 2642 pode acomodar essa espessura não uniforme ao longo do comprimento da interface entre o bloco de aperto 2658 e a lâmina ultrassônica 100; e pode fornecer adicionalmente uma distribuição substancialmente uniforme de força de compressão ao longo do comprimento do tecido interposto entre o bloco de aperto 2658 e a lâmina ultrassônica 100.
[00145] A Figura 54 mostra um braço de aperto exemplificador 2744 que compreende um feixe de molas 2742. O braço de aperto 2744 é similar ao braço de aperto 2644, exceto pelo fato de que o braço de aperto 2744 inclui o feixe de molas 2742 em vez da porção de espuma 2642. O feixe de molas 2742 é posicionado na reentrância 2747 do braço de aperto 2744. O membro de bloco 2748 é interposto entre o bloco de aperto 2758 e o feixe de molas 2742. O feixe de molas 2742 é resilientemente forçado para impulsionar o bloco de aperto 2758 na direção oposta ao braço de aperto 2444. Quando o tecido não estiver sendo comprimido entre o bloco de aperto 2758 e a lâmina ultrassônica 100, um vão 2745 é definido entre o braço de aperto 2444 e o bloco de aperto 2758 devido à força resiliente imposta pelo feixe de molas 2742. Entretanto, quando o tecido é comprimido entre o bloco de aperto 2758 e a lâmina ultrassônica 100, o feixe de molas 2748 se deforma para reduzir o tamanho do vão 2745 ou até mesmo eliminar o vão 2745. Em alguns casos, o tecido entre o bloco de aperto 2758 e a lâmina ultrassônica 100 não se estende ao longo do comprimento total do bloco de aperto 2758 e da lâmina ultrassônica 100. A maleabilidade no feixe de molas 2742 pode acomodar essa espessura não uniforme ao longo do comprimento da interface entre o bloco de aperto 2758 e a lâmina ultrassônica 100; e pode fornecer adicionalmente uma distribuição substancialmente uniforme de força de compressão ao longo do comprimento do tecido interposto entre o bloco de aperto 2758 e a lâmina ultrassônica 100.
[00146] Os exemplos acima são principalmente descritos nocontexto de compressão de tecido entre um bloco de aperto 58 e a lâmina ultrassônica 100. No entanto, em algumas ocasiões, o mesmo pode ser desejável para usar o instrumento 10 para realizar uma dissecção romba de tecido sem necessariamente capturar o tecido entre o bloco de aperto 58 e a lâmina ultrassônica 100 para cortar/vedar o tecido. Por exemplo, o atuador de extremidade 40 pode ser inserido entre duas camadas de tecido enquanto o braço de aperto 44 está em uma posição fechada e, então, o braço de aperto 44 pode ser conduzido para a posição aberta para separar as camadas de tecido. Alternativamente, com a lâmina 100 em um estado inativo, uma superfície externa de braço de aperto 44 pode ser pressionada contra o tecido e/ou arrastada contra o tecido para conduzir uma estrutura do tecido separada de uma outra estrutura do tecido. Consequentemente, o atuador de extremidade 40 pode ser dotado de um ou mais recursos que são configurados para facilitar a dissecção romba ou métodos adicionais de dissecção de tecido. O que segue são exemplos meramente ilustrativos de recursos de dissecção romba que podem ser prontamente incorporados no atuador de extremidade 40. Outras configurações de recursos de dissecção romba adequados serão evidentes para um versado na técnica com base nos ensinamentos da presente invenção.
[00147] As Figuras 55A a 56 mostram um braço de aperto 2844 que é similar ao braço de aperto 44, exceto pelo fato de que o braço de aperto 2844 desse exemplo compreende um braço de dissecção articulado 2842 que pode ser usado para dissecar com ponta romba o tecido. Deve-se compreender que o braço de aperto 2844 pode ter um bloco de aperto, incluindo, mas não se limitando a quaisquer vários blocos de aperto descritos na presente invenção. Conforme se pode observar melhor na Figura 56, o braço 2842 tem uma configuração em formato de T com uma barra 2842 que se estende transversalmente a partir do braço de aperto 2844. O braço 2842 é posicionado em uma posição distal do braço de aperto 2844 e é articulável em relação ao braço de aperto 2844 através do pino 2843.
[00148] O braço 2842 pode ser posicionado contra o braço de aperto 2844 em uma posição neutra, conforme mostrado na Figura 55A, enquanto o braço de aperto 2844 está sendo introduzido no local cirúrgico e quando o atuador de extremidade 40 estiver sendo usado para vedar/cortar o tecido preso entre o braço de aperto 2844 e a lâmina 100. O presente exemplo mostra o braço 2842 que é substancialmente nivelado com o braço de aperto 2844 na posição neutra. Alternativamente, o braço 2842 pode ser posicionado acima do braço de aperto 2844. Quando uma dissecção de tecido com ponta romba é desejada, o braço 2842 pode ser elevado e articulado na direção oposta ao braço de aperto 2844, conforme mostrado na Figura 55B. No presente exemplo, a barra 2841 do braço 2842 se estende além do braço de aperto 2844, conforme mostrado na Figura 56, para permitir que um usuário apreenda a barra 2841 (por exemplo, com o uso de um outro instrumento) para elevar o braço 2842. Como um outro exemplo meramente ilustrativo, uma extremidade livre da barra 2841 pode ser arrastada contra o tecido para o braço articulado 2842 para a posição de utilização. Outros métodos adequados para elevar o braço 2842 em relação ao braço de aperto 2844 serão evidentes para os versados na técnica em vista dos ensinamentos da presente invenção.
[00149] Com o braço 2842 na posição elevada, o tecido 2 pode ser posicionado ao redor de um lado proximal do braço 2842, conforme mostrado na Figura 57. O braço de aperto 2844 pode, então, ser puxado proximalmente para dissecar o tecido 2 com o braço 2842. A configuração em formato de T do braço 2842 mantém o tecido 2 contra o braço 2842 durante a dissecção. Logicamente, o braço 2842 pode incluir outras configurações adequadas para reter o tecido 2 no braço 2842. Por exemplo, as Figuras 58 a 59 mostram um braço de aperto 2944 que tem um braço 2942 com uma configuração do tipo gancho curvado. O braço 2942 é similar ao braço 2842, exceto pelo fato de que o braço 2942 se curva proximal e lateralmente ao longo do braço de aperto 2944. Conforme se pode observar melhor na Figura 58, o braço 2942 se estende passando o lado lateral do braço de aperto 2944 para permitir que um usuário apreenda o braço 2942 para o braço articulado 2942 em relação ao braço de aperto 2944. Na posição elevada ou de utilização, conforme mostrado na Figura 59, o braço 2942 pode ser usado para enganchar o tecido ao redor do braço 2942 para dissecar com ponta romba o tecido. Outras configurações e operabilidades adequadas que podem ser usadas e fornecidas para o braço 2842, 2942 serão evidentes aos versados na técnica em vista dos ensinamentos da presente invenção.
[00150] Em alguns casos, pode ser desejado dissecar com ponta romba o tecido sem elevar um braço 2842, 2942. A Figura 60 mostra um braço de aperto alternativo exemplificador 3044 que pode ser usado para dissecar com ponta romba o tecido. O braço de aperto 3044 é similar ao braço de aperto 2844, exceto pelo fato de que o braço de aperto 3044 compreende uma protuberância unitária 3048 em uma posição distal do braço de aperto 3044 em vez de um braço 2842. A protuberância 3048 se estende para fora do braço de aperto 3044 e inclui uma superfície proximal 3042. Consequentemente, a protuberância 3048 pode ser pressionada contra o tecido e puxada proximalmente, de tal que a superfície proximal 3042 atue para realizar uma dissecção romba do tecido. Nas configurações em que o braço de aperto 3044 é usado para fornecer uma dissecção dispersa separando-se as camadas do tecido uma em relação à outra, a protuberância 3048 pode auxiliar com a preensão de uma das camadas do tecido para, desse modo, impedir que a camada do tecido deslize da extremidade distal do braço de aperto 3044.
[00151] Em uma outra variação exemplificadora, conforme mostrado na Figura 61, um braço de aperto 3144 que é similar ao braço de aperto 3044 define uma reentrância 3148 em uma posição distal do braço de aperto 3144. A reentrância 3148 inclui uma superfície distal 3143 e uma superfície proximal 3142. No presente exemplo, a superfície distal 3143 é verticalmente alinhada no braço de aperto 3144 e a superfície proximal 3142 se inclina distalmente para a superfície distal 3143. Logicamente, outras configurações adequadas para a reentrância 3148 serão evidentes aos versados na técnica em vista dos ensinamentos da presente invenção. No presente exemplo, a posição distal do braço de aperto 3144 pode ser pressionada contra o tecido e puxada proximalmente de modo que o tecido possa deslizar contra a superfície proximal 3142 à superfície distal 3143. A superfície distal 3143 pode, então, se engatar ao tecido para realizar uma dissecção romba do tecido. Nas configurações em que o braço de aperto 3144 é usado para fornecer uma dissecção dispersa separando-se as camadas do tecido uma em relação à outra, a reentrância 3148 pode auxiliar com a preensão de uma das camadas do tecido para, desse modo, impedir que a camada do tecido deslize da extremidade distal do braço de aperto 3144. Outros recursos de braço de aperto adequados 3044, 3144 para dissecar com pontaromba o tecido serão evidentes para o versado na técnica em vista dos ensinamentos da presente invenção.
[00152] Em alguns casos, pode ser desejável revestir o braço de aperto 44 com um revestimento poroso. Um exemplo de tal revestimento poroso é revelado na patente US n° 4.526.839, intitulada "Process for Thermally Spraying Porous Metal Coatings on Substrates", concedida em 02 de julho de 1985, cuja revelação está aqui incorporada a título de referência. As Figuras 62A a 62B mostram um braço de aperto 3244, que é similar ao braço de aperto 44, exceto pelo fato de que o braço de aperto 3244 compreende um revestimento 3248 aplicado à posição distal do braço de aperto 3244. O revestimento 3248 pode ser um material poroso, como um metal, cerâmica, etc. Se um material cerâmico for usado no revestimento 3248, o revestimento 3248 pode atuar como uma camada isolante ao permitir que o ar resida nos poros do revestimento 3248, conforme mostrado na Figura 62A, para auxiliar com o gerenciamento térmico do braço de aperto 3244. Em outras palavras, o revestimento 3248 pode fornecer isolamento térmico do braço de aperto 3244.
[00153] Quando o braço de aperto 3244 for usado em um paciente,os fluidos corporais podem penetrar no revestimento 3248 e migrar para os poros do revestimento 3248, conforme mostrado na Figura 62B. Isso pode oferecer um efeito de resfriamento adicional à medida que os fluidos evaporam do braço de aperto 3244, o que pode impedir que o exterior do braço de aperto 3244 superaqueça. Por exemplo, o revestimento 3248 pode impedir que o exterior do braço de aperto 3244 exceda 100°C até que os fluidos sejam evaporados do braço de aperto 3244. Uma vez que esses fluidos corporais, que podem incluir sangue, podem ter uma aparência diferente do revestimento 3248, os fluidos podem alterar a cor e/ou aparência do revestimento 3248 quando os fluidos forem absorvidos pelo revestimento 3248. Isso pode fornecer uma indicação visual de que o braço de aperto 3244 foi usado, conforme mostrado na Figura 62B. Deve-se compreender que o tamanho dos poros do revestimento 3248 pode resultar na facilidade de remover esses fluidos do revestimento 3248. Os tamanhos de poro adequados podem ser selecionados pelo usuário.
[00154] O revestimento 3248 do presente exemplo é aplicado circunferencialmente ao redor do braço de aperto 3244. Alternativamente, o revestimento 3248 pode ser aplicado às áreas selecionadas do braço de aperto 3248, como a superfície de topo do braço de aperto 3248 ou outras áreas de instrumento 10. Deve-se também compreender que a parte inferior do braço de aperto 3244 pode incluir um bloco de aperto similar ao bloco de aperto 58. O revestimento 3248 pode estar ausente de tal bloco de aperto, de modo que uma superfície de contato de tecido do bloco de aperto seja exposta em relação ao braço de aperto 3244 e em relação ao revestimento 3248. Outras configurações adequadas para o revestimento 3248 serão evidentes aos versados na técnica em vista dos ensinamentos da presente invenção.
[00155] Embora o revestimento 3248 tenha sido descrito para um braço de aperto 3244 de um instrumento ultrassônico 10, deve-se notar que o revestimento 3248 também poderia ser incorporado em outros instrumentos. Por exemplo, o revestimento 3248 pode ser adicionado ao atuador de extremidade de dispositivos eletrocirúrgicos RF, dispositivos de grampeamento cirúrgico e/ou outros instrumentos cirúrgicos adequados. Somente a título de exemplo, o instrumento cirúrgico 10 pode compreender um instrumento eletrocirúrgico construído de acordo com ao menos alguns dos ensinamentos da patente US n° 6.500.176; patente US n° 7.112.201; patente US n° 7.125.409; patente US n° 7.169.146; patente US n° 7.186.253; patente US n° 7.189.233; patente US n° 7.220.951; patente US n° 7.309.849; patente US n° 7.311.709; patente US n° 7.354.440; patente US n° 7.381.209; publicação de patente US n° 2011/0087218; publicação de patente US n° 2012/0116379; publicação de patente US n° 2012/0078243; publicação de patente US n° 2012/0078247; pedido de patente US n° 13/622.729; pedido de patente US n° 13/622.735; e/ou pedido de patente US n° 13/658.784. As revelações de cada uma das referências supracitadas estão aqui incorporadas a título de referência. Alternativamente, o instrumento cirúrgico 10 pode compreender um instrumento de corte e grampeamento cirúrgico construído de acordo com ao menos alguns dos ensinamentos da patente US n° 7.416.101; publicação de patente US n° 2009/0209990; publicação de patente US n° 2012/0239012; e/ou pedido de patente US n° 13/716.308. As revelações de cada uma das referências supracitadas estão aqui incorporadas a título de referência.
[00156] Deve-se compreender que qualquer uma das versões dos instrumentos aqui descritos pode incluir várias outras características além ou em vez daquelas descritas acima. Somente a título de exemplo, qualquer dos instrumentos aqui descritos pode também incluir um ou mais dos vários recursos revelados em qualquer das várias referências que estão aqui incorporadas a título de referência. Deve ser também compreendido que os ensinamentos da presente invenção podem ser facilmente aplicados a qualquer um dos instrumentos descritos em qualquer uma das outras referências citadas na presente invenção, de modo que os ensinamentos da presente invenção possam ser facilmente combinados com os ensinamentos de qualquer uma das referências citadas na presente invenção de várias formas. Outros tipos de instrumentos aos quais os ensinamentos da presente invenção podem ser incorporados se tornarão evidentes para as pessoas versadas na técnica.
[00157] Deve-se compreender que qualquer patente, publicação, ou outro material de revelação tidos como incorporados à presente invenção a título de referência, total ou parcialmente, estão incorporados à presente invenção somente na medida em que o material incorporado não entrar em conflito com as definições, declarações ou outro material revelado apresentados nesta revelação. Desse modo, e na medida em que for necessário, a revelação como explicitamente aqui apresentada substitui qualquer material conflitante incorporado à presente invenção a título de referência. Qualquer material, ou porção do mesmo, tido como aqui incorporado a título de referência, mas que entre em conflito com as definições, declarações, ou outros materiais de revelação existentes aqui apresentados estará aqui incorporado apenas na medida em que não haja conflito entre o material incorporado e o material de revelação existente.
[00158] Versões dos dispositivos descritos acima podem ter aplicação em tratamentos médicos convencionais e procedimentos conduzidos por um profissional médico, bem como aplicação em tratamentos e procedimentos médicos assistidos por robótica. Somente a título de exemplo, vários ensinamentos da presente invenção podem ser prontamente incorporados a um sistema cirúrgico robótico como o sistema DAVINCI™ pelo Intuitive Surgical, Inc., de Sunnyvale, Califórnia, EUA. De modo similar, as pessoas versadas na técnica reconhecerão que vários ensinamentos da presente invenção podem ser facilmente combinados com vários ensinamentos da patente US n° 6.783.524, intitulada "Robotic Surgical Tool with Ultrasound Cauterizing and Cutting Instrument", publicada em 31 de agosto de 2004, cuja revelação está aqui incorporada a título de referência.
[00159] As versões descritas acima podem ser projetadas para serem descartadas após um único uso ou podem ser projetadas para serem usadas múltiplas vezes. As versões podem, em qualquer um ou em ambos os casos, ser recondicionadas para reutilização após ao menos uma utilização. O recondicionamento pode incluir qualquer combinação das etapas de desmontagem do dispositivo, seguida de limpeza ou substituição de peças específicas e a subsequente remontagem. Especificamente, algumas versões do dispositivo podem ser desmontadas em qualquer número de peças particulares ou partes do dispositivo podem ser seletivamente substituídas ou removidas em qualquer combinação. Com a limpeza e/ou substituição de partes particulares, algumas versões do dispositivo podem ser remontadas para uso subsequente em uma instalação de recondicionamento ou por um usuário imediatamente antes de um procedimento cirúrgico. Os versados na técnica compreenderão que o recondicionamento de um dispositivo pode usar uma variedade de técnicas de desmontagem, limpeza/substituição e remontagem. O uso de tais técnicas e o dispositivo recondicionado resultante estão dentro do escopo do presente pedido.
[00160] Apenas a título de exemplo, as versões aqui descritas podem ser esterilizadas antes e/ou depois de um procedimento. Em uma técnica de esterilização, o dispositivo é colocado em um recipiente fechado e vedado, como um saco plástico ou de TYVEK. O recipiente e o dispositivo podem então ser colocados em um campo de radiação, como radiação gama, raios X ou elétrons de alta energia, que pode penetrar no recipiente. A radiação pode exterminar bactérias no dispositivo e no recipiente. O dispositivo esterilizado pode, então, ser guardado em um recipiente estéril para uso posterior. O dispositivo pode também ser esterilizado com o uso de qualquer outra técnica conhecida, incluindo, mas não se limitando a, radiação beta ou gama, óxido de etileno ou vapor d'água.
[00161] Tendo mostrado e descrito várias modalidades da presente invenção, outras adaptações dos métodos e sistemas descritos na presente invenção podem ser realizadas por meio de modificações adequadas por uma pessoa versada na técnica sem se afastar do escopo da presente invenção. Várias dessas possíveis modificações foram mencionadas, e outras se tornarão evidentes àqueles versados na técnica. Por exemplo, os exemplos, modalidades, geometria, materiais, dimensões, proporções, etapas e similares discutidos acima são ilustrativos e não são obrigatórios. Consequentemente, o escopo da presente invenção deve ser considerado de acordo com os termos das reivindicações a seguir e entende-se que o mesmo não está limitado aos detalhes da estrutura e operação mostrados e descritos no relatório descritivo e nos desenhos.
Claims (17)
1. Aparelho para operar em tecido, sendo que o aparelho é caracterizado pelo fato de que compreende um atuador de extremidade, em que o atuador de extremidade compreende:(a) uma lâmina ultrassônica, em que o atuador de extremidade é operável para aplicar energia ultrassônica na lâmina;(b) um braço de aperto articulável em relação à lâmina; e(c) um bloco de aperto preso ao braço de aperto, em que o bloco de aperto é posicionado em oposição à lâmina de modo que o atuador de extremidade seja operável para comprimir o tecido entre o bloco de aperto e a lâmina;sendo que o braço de aperto compreende um recurso de travamento operável para reter o bloco de aperto em relação ao braço de aperto, em que o recurso de travamento é operável para impedir que o bloco de aperto se mova lateral, longitudinal e perpendicularmente em relação ao braço de aperto, em que o recurso de travamento compreende um transportador inserido em torno de uma porção do bloco de aperto, de modo que o bloco de aperto está posicionado dentro do transportador, em que o transportador é posicionado dentro do braço de aperto, em que o transportador compreende uma protuberância, em que o braço de aperto compreende uma fenda, em que a protuberância do transportador é disposta na fenda do braço de aperto.
2. Aparelho, de acordo com a reivindicação 1, caracterizado pelo fato de que o recurso de travamento ainda compreende uma pluralidade de barbelas que se estendem a partir do braço de aperto, em que as barbelas são configuradas para se engatar ao bloco de aperto.
3. Aparelho, de acordo com a reivindicação 1, caracterizado pelo fato de que o recurso de travamento ainda compreende pelo menos um sulco que se estende lateralmente para uma parede lateral interior do braço de aperto, em que o bloco de aperto compreende uma parede lateral que tem pelo menos uma protuberância que se estende lateralmente disposta dentro do sulco do braço de aperto.
4. Aparelho, de acordo com a reivindicação 1, caracterizado pelo fato de que o braço de aperto define uma abertura, em que o bloco de aperto define uma indentação que é configurada para se alinhar à abertura do braço de aperto, em que o recurso de travamento compreende um prendedor inserido na abertura do braço de aperto para se engatar à indentação do bloco de aperto.
5. Aparelho, de acordo com a reivindicação 1, caracterizado pelo fato de que o braço de aperto compreende um revestimento poroso.
6. Aparelho, de acordo com a reivindicação 1,caracterizado pelo fato de que o bloco de aperto compreende umapluralidade de sulcos.
7. Aparelho, de acordo com a reivindicação 6,caracterizado pelo fato de que os sulcos são dispostos em umpadrão reticulado.
8. Aparelho, de acordo com a reivindicação 1,caracterizado pelo fato de que o bloco de aperto compreende umapluralidade de cerdas.
9. Aparelho, de acordo com a reivindicação 1,caracterizado pelo fato de que o bloco de aperto compreende umapluralidade de dentes em uma configuração em forma de V invertido.
10. Aparelho, de acordo com a reivindicação 1, caracterizado pelo fato de que o bloco de aperto compreende uma pluralidade de dentes em uma configuração semicircular.
11. Aparelho, de acordo com a reivindicação 1, caracterizado pelo fato de que o bloco de aperto tem um primeiro conjunto de dentes e um segundo conjunto de dentes, em que os dentes do primeiro conjunto se estendem até uma primeira altura, em que os dentes do segundo conjunto se estendem até uma segunda altura, em que a primeira altura é maior que a segunda altura.
12. Aparelho, de acordo com a reivindicação 1, caracterizado pelo fato de que o braço de aperto é articulável em relação à lâmina ao longo de um plano de articulação, em que um entre o braço de aperto e a lâmina ou ambos são curvados ao longo do plano de articulação.
13. Aparelho, de acordo com a reivindicação 1, caracterizado pelo fato de que o braço de aperto tem uma extremidade distal, em que o bloco de aperto está localizado em um lado da extremidade distal do braço de aperto, em que o outro lado da extremidade distal do braço de aperto inclui um recurso de dissecção romba, em que o recurso de dissecção romba se projeta a partir de uma superfície externa do braço de aperto ou é recuado em relação à mesma.
14. Aparelho, de acordo com a reivindicação 13, caracterizado pelo fato de que o recurso de dissecção romba é articulável em relação ao braço de aperto entre uma posição neutra e uma posição de utilização.
15. Aparelho para operar em tecido, sendo que o aparelho é caracterizado pelo fato de que compreende um atuador de extremidade, em que o atuador de extremidade compreende:(a) uma lâmina ultrassônica, em que o atuador de extremidade é operável para aplicar energia ultrassônica na lâmina;(b) um braço de aperto articulável em relação à lâmina, em que o braço de aperto compreende um recurso de travamento; e(c) um bloco de aperto configurado para ser preso de maneira seletiva ao braço de aperto; em que o bloco de aperto é posicionado para se opor à lâmina quando o bloco de aperto é preso ao braço da aperto, de modo que o atuador de extremidade seja operável para comprimir o tecido entre o bloco de aperto e a lâmina;em que o recurso de travamento é operável para impedir que o bloco de aperto se mova lateral, longitudinal e perpendicularmente em relação ao braço de aperto quando o bloco de aperto é preso ao braço de aperto, em que o recurso de travamento compreende uma pluralidade de barbelas, em que o bloco de aperto compreende uma pluralidade de aberturas configuradas para receber a pluralidade de barbelas.
16. Aparelho, de acordo com a reivindicação 15, caracterizado pelo fato de que o recurso de travamento define uma reentrância e a pluralidade de barbelas se estende a partir da reentrância.
17. Aparelho para operar em tecido, sendo que o aparelho é caracterizado pelo fato de que compreende um atuador de extremidade, em que o atuador de extremidade compreende:(a) uma lâmina ultrassônica, em que o atuador de extremidade é operável para aplicar energia ultrassônica na lâmina;(b) um braço de aperto articulável em relação à lâmina; e(c) um bloco de aperto preso ao braço de aperto de modo que o bloco de aperto é impedido de se mover lateral, longitudinal e perpendicularmente em relação ao braço de aperto, em que o bloco de aperto é posicionado oposto à lâmina de modo que o atuador de extremidade é operável para comprimir o tecido entre o bloco de aperto e a lâmina;em que o braço de aperto tem uma extremidade distal, em que o bloco de aperto está localizado em um lado da extremidade distal do braço de aperto, em que o outro lado da extremidade distal do braço de aperto inclui um recurso de dissecção romba, em que o recurso de dissecção romba se projeta a partir de uma superfície externa do braço de aperto ou é recuado em relação à mesma;em que o recurso de dissecção romba é articulável em relação ao braço de aperto entre uma posição neutra e uma posição de utilização.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/109,190 | 2013-12-17 | ||
| US14/109,190 US9724120B2 (en) | 2013-12-17 | 2013-12-17 | Clamp arm features for ultrasonic surgical instrument |
| PCT/US2014/069033 WO2015094745A1 (en) | 2013-12-17 | 2014-12-08 | Clamp arm features for ultrasonic surgical instrument |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BR112016013817A2 BR112016013817A2 (pt) | 2017-08-08 |
| BR112016013817B1 true BR112016013817B1 (pt) | 2022-01-18 |
Family
ID=52134451
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BR112016013817-1A BR112016013817B1 (pt) | 2013-12-17 | 2014-12-08 | Aparelho para operar em tecido |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9724120B2 (pt) |
| EP (2) | EP4059456A3 (pt) |
| JP (1) | JP6632980B2 (pt) |
| CN (1) | CN106028979B (pt) |
| BR (1) | BR112016013817B1 (pt) |
| MX (1) | MX2016007977A (pt) |
| WO (1) | WO2015094745A1 (pt) |
Families Citing this family (95)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11229472B2 (en) | 2001-06-12 | 2022-01-25 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with multiple magnetic position sensors |
| US9089360B2 (en) | 2008-08-06 | 2015-07-28 | Ethicon Endo-Surgery, Inc. | Devices and techniques for cutting and coagulating tissue |
| US8663220B2 (en) | 2009-07-15 | 2014-03-04 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US10441345B2 (en) | 2009-10-09 | 2019-10-15 | Ethicon Llc | Surgical generator for ultrasonic and electrosurgical devices |
| US11090104B2 (en) | 2009-10-09 | 2021-08-17 | Cilag Gmbh International | Surgical generator for ultrasonic and electrosurgical devices |
| US8469981B2 (en) | 2010-02-11 | 2013-06-25 | Ethicon Endo-Surgery, Inc. | Rotatable cutting implement arrangements for ultrasonic surgical instruments |
| US9241757B2 (en) | 2012-01-13 | 2016-01-26 | Covidien Lp | System and method for performing surgical procedures with a reusable instrument module |
| US9636091B2 (en) | 2012-01-13 | 2017-05-02 | Covidien Lp | Hand-held electromechanical surgical system |
| EP2811932B1 (en) | 2012-02-10 | 2019-06-26 | Ethicon LLC | Robotically controlled surgical instrument |
| US9439668B2 (en) | 2012-04-09 | 2016-09-13 | Ethicon Endo-Surgery, Llc | Switch arrangements for ultrasonic surgical instruments |
| US20140005705A1 (en) | 2012-06-29 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Surgical instruments with articulating shafts |
| US9393037B2 (en) | 2012-06-29 | 2016-07-19 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| US9326788B2 (en) | 2012-06-29 | 2016-05-03 | Ethicon Endo-Surgery, Llc | Lockout mechanism for use with robotic electrosurgical device |
| US9226767B2 (en) | 2012-06-29 | 2016-01-05 | Ethicon Endo-Surgery, Inc. | Closed feedback control for electrosurgical device |
| US9351754B2 (en) | 2012-06-29 | 2016-05-31 | Ethicon Endo-Surgery, Llc | Ultrasonic surgical instruments with distally positioned jaw assemblies |
| US9408622B2 (en) | 2012-06-29 | 2016-08-09 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| US20140005702A1 (en) | 2012-06-29 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments with distally positioned transducers |
| US9198714B2 (en) | 2012-06-29 | 2015-12-01 | Ethicon Endo-Surgery, Inc. | Haptic feedback devices for surgical robot |
| US9095367B2 (en) | 2012-10-22 | 2015-08-04 | Ethicon Endo-Surgery, Inc. | Flexible harmonic waveguides/blades for surgical instruments |
| US20140135804A1 (en) | 2012-11-15 | 2014-05-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic and electrosurgical devices |
| US9814514B2 (en) | 2013-09-13 | 2017-11-14 | Ethicon Llc | Electrosurgical (RF) medical instruments for cutting and coagulating tissue |
| US9265926B2 (en) | 2013-11-08 | 2016-02-23 | Ethicon Endo-Surgery, Llc | Electrosurgical devices |
| GB2521228A (en) | 2013-12-16 | 2015-06-17 | Ethicon Endo Surgery Inc | Medical device |
| US9795436B2 (en) | 2014-01-07 | 2017-10-24 | Ethicon Llc | Harvesting energy from a surgical generator |
| US9554854B2 (en) | 2014-03-18 | 2017-01-31 | Ethicon Endo-Surgery, Llc | Detecting short circuits in electrosurgical medical devices |
| US10092310B2 (en) | 2014-03-27 | 2018-10-09 | Ethicon Llc | Electrosurgical devices |
| US9737355B2 (en) | 2014-03-31 | 2017-08-22 | Ethicon Llc | Controlling impedance rise in electrosurgical medical devices |
| US9913680B2 (en) | 2014-04-15 | 2018-03-13 | Ethicon Llc | Software algorithms for electrosurgical instruments |
| US10285724B2 (en) | 2014-07-31 | 2019-05-14 | Ethicon Llc | Actuation mechanisms and load adjustment assemblies for surgical instruments |
| US10639092B2 (en) | 2014-12-08 | 2020-05-05 | Ethicon Llc | Electrode configurations for surgical instruments |
| US10537667B2 (en) * | 2015-01-28 | 2020-01-21 | Ethicon Llc | High temperature material for use in medical devices |
| US10245095B2 (en) | 2015-02-06 | 2019-04-02 | Ethicon Llc | Electrosurgical instrument with rotation and articulation mechanisms |
| US20160256140A1 (en) * | 2015-03-03 | 2016-09-08 | United States Endoscopy Group, Inc. | Microforceps |
| US10595929B2 (en) | 2015-03-24 | 2020-03-24 | Ethicon Llc | Surgical instruments with firing system overload protection mechanisms |
| US10898256B2 (en) | 2015-06-30 | 2021-01-26 | Ethicon Llc | Surgical system with user adaptable techniques based on tissue impedance |
| US10034704B2 (en) | 2015-06-30 | 2018-07-31 | Ethicon Llc | Surgical instrument with user adaptable algorithms |
| US11129669B2 (en) | 2015-06-30 | 2021-09-28 | Cilag Gmbh International | Surgical system with user adaptable techniques based on tissue type |
| US11051873B2 (en) | 2015-06-30 | 2021-07-06 | Cilag Gmbh International | Surgical system with user adaptable techniques employing multiple energy modalities based on tissue parameters |
| US11141213B2 (en) | 2015-06-30 | 2021-10-12 | Cilag Gmbh International | Surgical instrument with user adaptable techniques |
| US10507033B2 (en) | 2015-08-26 | 2019-12-17 | Ethicon Llc | Ultrasonic surgical instrument with replaceable clamp pad |
| US10456157B2 (en) * | 2015-08-26 | 2019-10-29 | Ethicon Llc | Ultrasonic surgical instrument clamp arm with snap-on clamp pad |
| US10751108B2 (en) | 2015-09-30 | 2020-08-25 | Ethicon Llc | Protection techniques for generator for digitally generating electrosurgical and ultrasonic electrical signal waveforms |
| US10595930B2 (en) | 2015-10-16 | 2020-03-24 | Ethicon Llc | Electrode wiping surgical device |
| US10492820B2 (en) * | 2015-10-16 | 2019-12-03 | Ethicon Llc | Ultrasonic surgical instrument with removable shaft assembly portion |
| US20170164997A1 (en) * | 2015-12-10 | 2017-06-15 | Ethicon Endo-Surgery, Llc | Method of treating tissue using end effector with ultrasonic and electrosurgical features |
| US10660692B2 (en) * | 2015-12-10 | 2020-05-26 | Ethicon Llc | End effector for instrument with ultrasonic blade and bipolar clamp arm |
| US10743901B2 (en) | 2015-12-29 | 2020-08-18 | Ethicon Llc | Snap fit clamp pad for ultrasonic surgical instrument |
| US10575892B2 (en) | 2015-12-31 | 2020-03-03 | Ethicon Llc | Adapter for electrical surgical instruments |
| US11229471B2 (en) | 2016-01-15 | 2022-01-25 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on tissue characterization |
| US10716615B2 (en) | 2016-01-15 | 2020-07-21 | Ethicon Llc | Modular battery powered handheld surgical instrument with curved end effectors having asymmetric engagement between jaw and blade |
| US20170202595A1 (en) | 2016-01-15 | 2017-07-20 | Ethicon Endo-Surgery, Llc | Modular battery powered handheld surgical instrument with a plurality of control programs |
| US11129670B2 (en) | 2016-01-15 | 2021-09-28 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on button displacement, intensity, or local tissue characterization |
| US10537351B2 (en) | 2016-01-15 | 2020-01-21 | Ethicon Llc | Modular battery powered handheld surgical instrument with variable motor control limits |
| US10603065B2 (en) * | 2016-02-18 | 2020-03-31 | Covidien Lp | Surgical instruments and jaw members thereof |
| US10555769B2 (en) | 2016-02-22 | 2020-02-11 | Ethicon Llc | Flexible circuits for electrosurgical instrument |
| US10172684B2 (en) | 2016-04-29 | 2019-01-08 | Ethicon Llc | Lifecycle monitoring features for surgical instrument |
| US10485607B2 (en) | 2016-04-29 | 2019-11-26 | Ethicon Llc | Jaw structure with distal closure for electrosurgical instruments |
| US10702329B2 (en) | 2016-04-29 | 2020-07-07 | Ethicon Llc | Jaw structure with distal post for electrosurgical instruments |
| US10646269B2 (en) | 2016-04-29 | 2020-05-12 | Ethicon Llc | Non-linear jaw gap for electrosurgical instruments |
| US10456193B2 (en) | 2016-05-03 | 2019-10-29 | Ethicon Llc | Medical device with a bilateral jaw configuration for nerve stimulation |
| WO2018011918A1 (ja) * | 2016-07-13 | 2018-01-18 | オリンパス株式会社 | 把持処置具 |
| US10376305B2 (en) | 2016-08-05 | 2019-08-13 | Ethicon Llc | Methods and systems for advanced harmonic energy |
| US10987124B2 (en) | 2016-11-22 | 2021-04-27 | Covidien Lp | Surgical instruments and jaw members thereof |
| US11266430B2 (en) | 2016-11-29 | 2022-03-08 | Cilag Gmbh International | End effector control and calibration |
| US11058472B2 (en) * | 2017-05-22 | 2021-07-13 | Cilag Gmbh International | Combination ultrasonic and electrosurgical instrument having clamp arm electrode |
| CN107280735B (zh) | 2017-07-21 | 2020-08-04 | 上海逸思医疗科技有限公司 | 可重复使用的超声手术器械 |
| US20190038308A1 (en) * | 2017-08-02 | 2019-02-07 | Covidien Lp | Jaw members for surgical instruments and surgical instruments incorporating the same |
| US11076910B2 (en) | 2018-01-22 | 2021-08-03 | Covidien Lp | Jaw members for surgical instruments and surgical instruments incorporating the same |
| US11540856B2 (en) | 2018-05-31 | 2023-01-03 | Covidien Lp | Methods and systems for ultrasonic vessel sealing |
| US11179177B2 (en) * | 2019-04-30 | 2021-11-23 | Cilag Gmbh International | Ultrasonic blade and clamp arm matching design |
| CN110584751B (zh) * | 2019-09-27 | 2024-10-01 | 湖南瀚德微创医疗科技有限公司 | 一种提高超声切割止血刀使用寿命的钳头 |
| US11786291B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Deflectable support of RF energy electrode with respect to opposing ultrasonic blade |
| US12114912B2 (en) | 2019-12-30 | 2024-10-15 | Cilag Gmbh International | Non-biased deflectable electrode to minimize contact between ultrasonic blade and electrode |
| US11660089B2 (en) | 2019-12-30 | 2023-05-30 | Cilag Gmbh International | Surgical instrument comprising a sensing system |
| US12023086B2 (en) | 2019-12-30 | 2024-07-02 | Cilag Gmbh International | Electrosurgical instrument for delivering blended energy modalities to tissue |
| US12082808B2 (en) | 2019-12-30 | 2024-09-10 | Cilag Gmbh International | Surgical instrument comprising a control system responsive to software configurations |
| US11786294B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Control program for modular combination energy device |
| US11986201B2 (en) | 2019-12-30 | 2024-05-21 | Cilag Gmbh International | Method for operating a surgical instrument |
| US12076006B2 (en) | 2019-12-30 | 2024-09-03 | Cilag Gmbh International | Surgical instrument comprising an orientation detection system |
| US11950797B2 (en) | 2019-12-30 | 2024-04-09 | Cilag Gmbh International | Deflectable electrode with higher distal bias relative to proximal bias |
| US11911063B2 (en) | 2019-12-30 | 2024-02-27 | Cilag Gmbh International | Techniques for detecting ultrasonic blade to electrode contact and reducing power to ultrasonic blade |
| US11944366B2 (en) | 2019-12-30 | 2024-04-02 | Cilag Gmbh International | Asymmetric segmented ultrasonic support pad for cooperative engagement with a movable RF electrode |
| US11974801B2 (en) | 2019-12-30 | 2024-05-07 | Cilag Gmbh International | Electrosurgical instrument with flexible wiring assemblies |
| US12053224B2 (en) | 2019-12-30 | 2024-08-06 | Cilag Gmbh International | Variation in electrode parameters and deflectable electrode to modify energy density and tissue interaction |
| US11812957B2 (en) | 2019-12-30 | 2023-11-14 | Cilag Gmbh International | Surgical instrument comprising a signal interference resolution system |
| US11452525B2 (en) | 2019-12-30 | 2022-09-27 | Cilag Gmbh International | Surgical instrument comprising an adjustment system |
| US11937866B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Method for an electrosurgical procedure |
| US11696776B2 (en) | 2019-12-30 | 2023-07-11 | Cilag Gmbh International | Articulatable surgical instrument |
| US20210196361A1 (en) | 2019-12-30 | 2021-07-01 | Ethicon Llc | Electrosurgical instrument with monopolar and bipolar energy capabilities |
| US11779387B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Clamp arm jaw to minimize tissue sticking and improve tissue control |
| US12064109B2 (en) | 2019-12-30 | 2024-08-20 | Cilag Gmbh International | Surgical instrument comprising a feedback control circuit |
| US11937863B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Deflectable electrode with variable compression bias along the length of the deflectable electrode |
| US11684412B2 (en) | 2019-12-30 | 2023-06-27 | Cilag Gmbh International | Surgical instrument with rotatable and articulatable surgical end effector |
| US11779329B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a flex circuit including a sensor system |
| WO2021152753A1 (ja) * | 2020-01-29 | 2021-08-05 | オリンパス株式会社 | 処置具、及び処置具の製造方法 |
Family Cites Families (66)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4526839A (en) | 1984-03-01 | 1985-07-02 | Surface Science Corp. | Process for thermally spraying porous metal coatings on substrates |
| AU646266B2 (en) | 1990-09-27 | 1994-02-17 | General Electric Company | CVD diamond coated ultrasonic probe tips |
| US5322055B1 (en) | 1993-01-27 | 1997-10-14 | Ultracision Inc | Clamp coagulator/cutting system for ultrasonic surgical instruments |
| GB9322240D0 (en) | 1993-10-28 | 1993-12-15 | Microsurgical Equipment Ltd | Improvements in and relating to needle holder jaws |
| AU694225B2 (en) | 1994-08-02 | 1998-07-16 | Ethicon Endo-Surgery, Inc. | Ultrasonic hemostatic and cutting instrument |
| US6669690B1 (en) | 1995-04-06 | 2003-12-30 | Olympus Optical Co., Ltd. | Ultrasound treatment system |
| DE69832497T2 (de) * | 1997-02-03 | 2006-08-03 | Applied Medical Resources Corp., Rancho Santa Margarita | Chirurgische instrumente mit verbesserter zugfähigkeit |
| US20030236537A1 (en) | 1999-08-09 | 2003-12-25 | Applied Medical Resources Corporation | Surgical instruments with improved traction |
| US5873873A (en) | 1997-10-10 | 1999-02-23 | Ethicon Endo-Surgery, Inc. | Ultrasonic clamp coagulator apparatus having improved clamp mechanism |
| US6068647A (en) * | 1997-10-10 | 2000-05-30 | Ethicon Endo-Surgery, Inc. | Ultrasonic clamp coagulator apparatus having improved clamp arm tissue pad |
| US5980510A (en) | 1997-10-10 | 1999-11-09 | Ethicon Endo-Surgery, Inc. | Ultrasonic clamp coagulator apparatus having improved clamp arm pivot mount |
| US6193709B1 (en) | 1998-05-13 | 2001-02-27 | Olympus Optical Co., Ltd. | Ultrasonic treatment apparatus |
| US6099539A (en) | 1998-07-27 | 2000-08-08 | Thomas J. Fogarty | Surgical clamp pad with interdigitating teeth |
| US6325811B1 (en) | 1999-10-05 | 2001-12-04 | Ethicon Endo-Surgery, Inc. | Blades with functional balance asymmetries for use with ultrasonic surgical instruments |
| US6500176B1 (en) | 2000-10-23 | 2002-12-31 | Csaba Truckai | Electrosurgical systems and techniques for sealing tissue |
| US6783524B2 (en) | 2001-04-19 | 2004-08-31 | Intuitive Surgical, Inc. | Robotic surgical tool with ultrasound cauterizing and cutting instrument |
| US6929644B2 (en) | 2001-10-22 | 2005-08-16 | Surgrx Inc. | Electrosurgical jaw structure for controlled energy delivery |
| US7125409B2 (en) | 2001-10-22 | 2006-10-24 | Surgrx, Inc. | Electrosurgical working end for controlled energy delivery |
| US7189233B2 (en) | 2001-10-22 | 2007-03-13 | Surgrx, Inc. | Electrosurgical instrument |
| US7311709B2 (en) | 2001-10-22 | 2007-12-25 | Surgrx, Inc. | Electrosurgical instrument and method of use |
| US7354440B2 (en) | 2001-10-22 | 2008-04-08 | Surgrx, Inc. | Electrosurgical instrument and method of use |
| US20030114874A1 (en) | 2001-11-08 | 2003-06-19 | Craig H. Wayne | Ultrasonic clamp coagulator apparatus having an improved clamping end-effector |
| CA2733138C (en) | 2002-01-22 | 2012-10-09 | Csaba Truckai | Electrosurgical instrument and method of use |
| JP4388475B2 (ja) | 2002-08-02 | 2009-12-24 | オリンパス株式会社 | 超音波処置具 |
| US6821284B2 (en) | 2003-01-22 | 2004-11-23 | Novare Surgical Systems, Inc. | Surgical clamp inserts with micro-tractive surfaces |
| US7169146B2 (en) | 2003-02-14 | 2007-01-30 | Surgrx, Inc. | Electrosurgical probe and method of use |
| JP2004267445A (ja) | 2003-03-07 | 2004-09-30 | Olympus Corp | 手術装置 |
| WO2005052959A2 (en) | 2003-11-19 | 2005-06-09 | Surgrx, Inc. | Polymer compositions exhibiting a ptc property and method of fabrication |
| US8104184B2 (en) * | 2004-03-11 | 2012-01-31 | The Gillette Company | Shaving cartridges and razors |
| US7220951B2 (en) | 2004-04-19 | 2007-05-22 | Surgrx, Inc. | Surgical sealing surfaces and methods of use |
| US7846155B2 (en) | 2004-10-08 | 2010-12-07 | Ethicon Endo-Surgery, Inc. | Handle assembly having hand activation for use with an ultrasonic surgical instrument |
| US20070016236A1 (en) | 2005-07-18 | 2007-01-18 | Crescendo Technologies, Llc | Balanced ultrasonic curved blade |
| US20070191713A1 (en) | 2005-10-14 | 2007-08-16 | Eichmann Stephen E | Ultrasonic device for cutting and coagulating |
| US7416101B2 (en) | 2006-01-31 | 2008-08-26 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with loading force feedback |
| US20070282333A1 (en) | 2006-06-01 | 2007-12-06 | Fortson Reginald D | Ultrasonic waveguide and blade |
| US20080103494A1 (en) | 2006-11-01 | 2008-05-01 | Boston Scientific Scimed, Inc. | Bipolar ablation probe having porous electrodes for delivering electrically conductive fluid |
| WO2008089174A2 (en) | 2007-01-16 | 2008-07-24 | Ethicon Endo-Surgery, Inc. | Ultrasonic device for cutting and coagulating |
| US8057498B2 (en) | 2007-11-30 | 2011-11-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instrument blades |
| US20090088742A1 (en) * | 2007-09-27 | 2009-04-02 | Shinya Masuda | Surgical operating apparatus |
| JP2010540186A (ja) | 2007-10-05 | 2010-12-24 | エシコン・エンド−サージェリィ・インコーポレイテッド | 人間工学的外科用器具 |
| US8657174B2 (en) | 2008-02-14 | 2014-02-25 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument having handle based power source |
| US20090270853A1 (en) | 2008-04-28 | 2009-10-29 | Chie Yachi | Surgical operating apparatus |
| US20100063527A1 (en) | 2008-09-05 | 2010-03-11 | Beaupre Jean Michael | Tissue pad |
| EP2361042B1 (en) | 2008-09-12 | 2016-11-30 | Ethicon Endo-Surgery, Inc. | Ultrasonic device for fingertip control |
| US8461744B2 (en) | 2009-07-15 | 2013-06-11 | Ethicon Endo-Surgery, Inc. | Rotating transducer mount for ultrasonic surgical instruments |
| US8663220B2 (en) | 2009-07-15 | 2014-03-04 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US8968358B2 (en) | 2009-08-05 | 2015-03-03 | Covidien Lp | Blunt tissue dissection surgical instrument jaw designs |
| US8939974B2 (en) | 2009-10-09 | 2015-01-27 | Ethicon Endo-Surgery, Inc. | Surgical instrument comprising first and second drive systems actuatable by a common trigger mechanism |
| US9060776B2 (en) | 2009-10-09 | 2015-06-23 | Ethicon Endo-Surgery, Inc. | Surgical generator for ultrasonic and electrosurgical devices |
| US8220688B2 (en) | 2009-12-24 | 2012-07-17 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument with electric actuator directional control assembly |
| US9089327B2 (en) | 2010-09-24 | 2015-07-28 | Ethicon Endo-Surgery, Inc. | Surgical instrument with multi-phase trigger bias |
| US9402682B2 (en) | 2010-09-24 | 2016-08-02 | Ethicon Endo-Surgery, Llc | Articulation joint features for articulating surgical device |
| US20120078244A1 (en) | 2010-09-24 | 2012-03-29 | Worrell Barry C | Control features for articulating surgical device |
| US9545253B2 (en) | 2010-09-24 | 2017-01-17 | Ethicon Endo-Surgery, Llc | Surgical instrument with contained dual helix actuator assembly |
| US9381058B2 (en) | 2010-11-05 | 2016-07-05 | Ethicon Endo-Surgery, Llc | Recharge system for medical devices |
| US20120116265A1 (en) | 2010-11-05 | 2012-05-10 | Houser Kevin L | Surgical instrument with charging devices |
| US9161803B2 (en) | 2010-11-05 | 2015-10-20 | Ethicon Endo-Surgery, Inc. | Motor driven electrosurgical device with mechanical and electrical feedback |
| CN103052362B (zh) | 2010-12-17 | 2015-07-15 | 奥林巴斯医疗株式会社 | 用于处理活体组织的探头及超声波探头的驱动方法 |
| US9326787B2 (en) | 2011-02-07 | 2016-05-03 | Olympus Corporation | Energy treatment instrument |
| US9113943B2 (en) | 2011-03-30 | 2015-08-25 | Covidien Lp | Ultrasonic surgical instruments |
| US8734476B2 (en) * | 2011-10-13 | 2014-05-27 | Ethicon Endo-Surgery, Inc. | Coupling for slip ring assembly and ultrasonic transducer in surgical instrument |
| JP6234932B2 (ja) | 2011-10-24 | 2017-11-22 | エシコン・エンド−サージェリィ・インコーポレイテッドEthicon Endo−Surgery,Inc. | 医療用器具 |
| US9028494B2 (en) | 2012-06-28 | 2015-05-12 | Ethicon Endo-Surgery, Inc. | Interchangeable end effector coupling arrangement |
| US9351754B2 (en) | 2012-06-29 | 2016-05-31 | Ethicon Endo-Surgery, Llc | Ultrasonic surgical instruments with distally positioned jaw assemblies |
| US9393037B2 (en) | 2012-06-29 | 2016-07-19 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| WO2014052809A1 (en) | 2012-09-28 | 2014-04-03 | Beth Israel Deaconess Medical Center | Surgical dissector device |
-
2013
- 2013-12-17 US US14/109,190 patent/US9724120B2/en active Active
-
2014
- 2014-12-08 BR BR112016013817-1A patent/BR112016013817B1/pt active IP Right Grant
- 2014-12-08 CN CN201480075673.1A patent/CN106028979B/zh active Active
- 2014-12-08 EP EP22167460.9A patent/EP4059456A3/en active Pending
- 2014-12-08 WO PCT/US2014/069033 patent/WO2015094745A1/en active Application Filing
- 2014-12-08 MX MX2016007977A patent/MX2016007977A/es active IP Right Grant
- 2014-12-08 EP EP14816075.7A patent/EP3082624B1/en active Active
- 2014-12-08 JP JP2016540604A patent/JP6632980B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2015094745A1 (en) | 2015-06-25 |
| MX2016007977A (es) | 2016-10-07 |
| JP6632980B2 (ja) | 2020-01-22 |
| CN106028979B (zh) | 2020-02-21 |
| EP3082624B1 (en) | 2022-05-18 |
| JP2016540597A (ja) | 2016-12-28 |
| US9724120B2 (en) | 2017-08-08 |
| EP4059456A2 (en) | 2022-09-21 |
| EP4059456A3 (en) | 2022-11-23 |
| CN106028979A (zh) | 2016-10-12 |
| BR112016013817A2 (pt) | 2017-08-08 |
| EP3082624A1 (en) | 2016-10-26 |
| US20150164532A1 (en) | 2015-06-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BR112016013817B1 (pt) | Aparelho para operar em tecido | |
| US11963691B2 (en) | Surgical instrument with selectively actuated gap-setting features for end effector | |
| BR112017015791B1 (pt) | Aparelho para operar em tecido e aparelho para uso em um instrumento cirúrgico ultrassônico | |
| US11364045B2 (en) | Ultrasonic forceps | |
| JP6869985B2 (ja) | 超音波及び電気外科的特徴を有する器具のためのエンドエフェクタ | |
| BR112018007724B1 (pt) | Instrumento cirúrgico | |
| BR112019024307B1 (pt) | Instrumento eletrocirúrgico e ultrassônico que tem lâmina ultrassônica curvada | |
| BR112016005855B1 (pt) | Instrumento ultrassônico | |
| BR112017001867B1 (pt) | Instrumento cirúrgico ultrassônico | |
| BR112016011728B1 (pt) | Aparelho | |
| BR112017022173B1 (pt) | Aparelho para operar em tecido | |
| BR112016013820B1 (pt) | Aparelho para operar em tecido | |
| BR112018013222B1 (pt) | Instrumento cirúrgico ultrassônico e método para montar uma almofada de aperto com um braço de aperto de um instrumento cirúrgico ultrassônico | |
| US11439427B2 (en) | Ultrasonic surgical instrument with clamp arm deflection feature | |
| BR112017005322B1 (pt) | Instrumento ultrassônico | |
| BR112017005480B1 (pt) | Instrumento cirúrgico ultrassônico com um braço de aperto removível | |
| BR112018012535B1 (pt) | Instrumento cirúrgico ultrassônico com segmento tubular de guia de ondas acústicas | |
| BR112018073641B1 (pt) | Aparelho para operar em tecido | |
| BR112019009906B1 (pt) | Instrumento cirúrgico com controle de coagulação pontual | |
| BR112018008612B1 (pt) | Instrumento cirúrgico ultrassônico |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B06U | Preliminary requirement: requests with searches performed by other patent offices: procedure suspended [chapter 6.21 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 20 (VINTE) ANOS CONTADOS A PARTIR DE 08/12/2014, OBSERVADAS AS CONDICOES LEGAIS. |