WO2024084684A1 - Elevator diagnosis system and diagnosis method - Google Patents
Elevator diagnosis system and diagnosis method Download PDFInfo
- Publication number
- WO2024084684A1 WO2024084684A1 PCT/JP2022/039289 JP2022039289W WO2024084684A1 WO 2024084684 A1 WO2024084684 A1 WO 2024084684A1 JP 2022039289 W JP2022039289 W JP 2022039289W WO 2024084684 A1 WO2024084684 A1 WO 2024084684A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- door
- unit
- value
- elevator
- measurement
- Prior art date
Links
- 238000003745 diagnosis Methods 0.000 title abstract description 16
- 238000000034 method Methods 0.000 title abstract description 9
- 230000007613 environmental effect Effects 0.000 claims abstract description 76
- 238000005259 measurement Methods 0.000 claims abstract description 73
- 238000012937 correction Methods 0.000 claims abstract description 32
- 230000005856 abnormality Effects 0.000 claims abstract description 27
- 238000004364 calculation method Methods 0.000 claims description 31
- 238000002405 diagnostic procedure Methods 0.000 claims description 3
- 238000012545 processing Methods 0.000 description 22
- 230000006870 function Effects 0.000 description 18
- 238000010586 diagram Methods 0.000 description 9
- 238000012806 monitoring device Methods 0.000 description 6
- 230000000694 effects Effects 0.000 description 5
- 238000004891 communication Methods 0.000 description 4
- 238000012423 maintenance Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 3
- 230000002159 abnormal effect Effects 0.000 description 2
- 238000007689 inspection Methods 0.000 description 2
- 239000002131 composite material Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000000704 physical effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 230000002195 synergetic effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000032258 transport Effects 0.000 description 1
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B13/00—Doors, gates, or other apparatus controlling access to, or exit from, cages or lift well landings
- B66B13/02—Door or gate operation
- B66B13/14—Control systems or devices
Definitions
- This disclosure relates to an elevator diagnostic system and diagnostic method.
- Patent Document 1 discloses an example of an elevator diagnostic system.
- the door torque is measured when the elevator door is opened and closed.
- the diagnostic system determines whether there is an abnormality based on the measured door torque.
- the diagnostic system of Patent Document 1 diagnoses abnormalities regardless of the operating environment, such as temperature and humidity.
- elevator door torque can be affected by the operating environment, such as temperature and humidity. For this reason, the accuracy of diagnosis may decrease depending on the operating environment.
- This disclosure is directed to solving such problems.
- This disclosure provides a diagnostic system and method that can diagnose abnormalities in elevator door torque while taking into account the effects of the operating environment.
- the elevator diagnostic system includes a measurement unit that measures the door torque when the elevator door is opened and closed, an acquisition unit that acquires an offset value for correcting the measurement value of the door torque by the measurement unit based on environmental information including at least one of temperature and humidity information at the time when the measurement unit measures the door torque, a correction unit that corrects the measurement value of the door torque by the measurement unit using the offset value, and a determination unit that determines an abnormality in the door torque when the difference between the door torque value corrected by the correction unit and a preset reference value is greater than a preset threshold value.
- the elevator diagnosis method includes a measurement step of measuring the door torque when the elevator door is opened or closed, an acquisition step of acquiring an offset value for correcting the measurement value of the door torque in the measurement step based on environmental information including at least one of temperature and humidity information at the time when the door torque is measured in the measurement step, a correction step of correcting the measurement value of the door torque in the measurement step by the offset value, and a determination step of determining an abnormality in the door torque when the difference between the door torque value corrected in the correction step and a preset reference value is greater than a preset threshold value.
- the diagnostic system or method disclosed herein can diagnose abnormalities in elevator door torque while taking into account the effects of the operating environment.
- FIG. 1 is a configuration diagram of an elevator according to a first embodiment.
- 1 is a block diagram showing a configuration of a diagnostic system according to a first embodiment;
- FIG. 4 is a diagram showing an example of an offset value in the diagnostic system according to the first embodiment.
- FIG. 4 is a diagram showing an example of an offset value in the diagnostic system according to the first embodiment.
- 4 is a flowchart showing an example of the operation of the diagnostic system according to the first embodiment.
- 1 is a hardware configuration diagram of a main part of a diagnostic system according to a first embodiment.
- FIG. 1 is a configuration diagram of an elevator 1 according to the first embodiment.
- the elevator 1 is applied, for example, to a building having multiple floors.
- a hoistway 2 for the elevator 1 is provided in the building.
- the hoistway 2 is a long space in the vertical direction that spans multiple floors.
- a landing 3 for the elevator 1 is provided on each floor of the building.
- the landing 3 is a place that leads to the hoistway 2.
- a landing door 4 is provided at the landing 3 on each floor.
- the landing door 4 includes a landing door panel 5 and a landing threshold 6.
- the landing door panel 5 separates the hoistway 2 and the landing 3.
- the landing door panel 5 opens and closes along the landing threshold 6.
- the elevator 1 includes a hoisting machine 7, a main rope 8, a car 9, a counterweight 10, and a control panel 11.
- the hoisting machine 7 is arranged, for example, at the top or bottom of the elevator shaft 2. For example, if a machine room for the elevator 1 is provided above the elevator shaft 2, the hoisting machine 7 may be arranged in the machine room.
- the hoisting machine 7 includes a motor that generates a driving force and a sheave that rotates by the driving force generated by the motor.
- the main rope 8 is wound around the sheave of the hoist 7.
- the main rope 8 supports the load of the cage 9 on one side of the sheave of the hoist 7.
- the main rope 8 supports the load of the counterweight 10 on the other side of the sheave of the hoist 7.
- the main rope 8 moves so as to be wound up into the sheave of the hoist 7 or unwound from the sheave of the hoist 7 by the driving force generated by the motor of the hoist 7.
- the car 9 is a device that transports users of the elevator 1 between multiple floors by traveling up and down the hoistway 2.
- the car 9 is equipped with a car door 12.
- the car door 12 is equipped with a door drive device 13, a car door panel 14, and a car threshold 15.
- the door drive device 13 is equipped with a door motor that generates a driving force.
- the car door panel 14 divides the inside and outside of the car 9.
- the car door panel 14 opens and closes along the car threshold 15 by the driving force generated by the door motor of the door drive device 13.
- the counterweight 10 is a device that balances the load applied to both sides of the sheave of the hoisting machine 7 with the car 9.
- the car 9 and the counterweight 10 travel in opposite directions to each other in the up and down direction in the hoistway 2 in conjunction with the movement of the main rope 8.
- the control panel 11 is a device that controls the operation of the elevator 1.
- the control panel 11 is arranged, for example, at the top or bottom of the hoistway 2. For example, if a machine room for the elevator 1 is provided above the hoistway 2, the control panel 11 may be arranged in the machine room.
- the operation of the elevator 1 controlled by the control panel 11 includes, for example, the running of the car 9.
- the control panel 11 is connected to the hoist 7 and the car 9 so as to be able to output control signals for the elevator 1 and to be able to obtain information on the status of the elevator 1.
- a remote monitoring device 16 is applied to the elevator 1.
- the remote monitoring device 16 is a device used for remotely monitoring the status of the elevator 1.
- the remote monitoring device 16 is connected to the control panel 11 so as to be able to collect information on the status of the elevator 1 and to be able to output control signals from outside to the elevator 1.
- the information collected by the remote monitoring device 16 is transmitted to a central management device 18 via a communication network 17, such as the Internet or a telephone line.
- the central management device 18 is a device that collects and manages information on the status of the elevator 1.
- the central management device 18 is provided at a base, such as an information center.
- the central management device 18 is composed of, for example, one or more server devices. Some or all of the functions of the central management device 18 may be implemented by processing and storage resources on a cloud service.
- the diagnostic system 19 is applied to the elevator 1.
- the diagnostic system 19 is a system that diagnoses the state of the elevator 1, such as abnormalities.
- the diagnostic system 19 determines an abnormality in the door torque generated by the door motor of the door drive device 13 as the state of the elevator 1.
- the diagnostic system 19 may be an internal system of the elevator 1, or an external system applied to the elevator 1 from the outside.
- the diagnostic system 19 determines an abnormality in the door torque during a diagnostic operation of the elevator 1 that is performed at a preset timing, for example.
- the preset timing is a regular timing, such as once a month.
- the diagnostic system 19 includes an environmental sensor 20 and a measurement unit 21.
- the environmental sensor 20 is a part equipped with a function for measuring environmental information that represents the operating environment of the door driver 13.
- the environmental sensor 20 is provided, for example, in the elevator shaft 2.
- the environmental sensor 20 is disposed near the control panel 11.
- the environmental sensor 20 may also be disposed near the door driver 13 in the car 9.
- the environmental information includes at least one of the temperature and humidity information of the elevator shaft 2.
- the environmental information includes both the temperature and humidity of the elevator shaft 2.
- the environmental sensor 20 is, for example, a temperature and humidity sensor that measures temperature and humidity.
- the measurement unit 21 is a part equipped with a function for measuring the door torque when the doors of the elevator 1 are opened and closed.
- the measurement unit 21 measures, for example, the door torque generated by the door motor of the door drive device 13 to open and close the car door panel 14.
- the measurement unit 21 is provided in the door drive device 13.
- the diagnostic system 19 diagnoses abnormalities in the door torque using the environmental information measured by the environmental sensor 20 and the door torque measured by the measurement unit 21.
- FIG. 2 is a block diagram showing the configuration of the diagnostic system 19 according to the first embodiment.
- the diagnostic system 19 includes a correction unit 22, an acquisition unit 23, a calculation unit 24, a determination unit 25, and an alarm unit 26.
- the functions of the correction unit 22, the acquisition unit 23, the determination unit 25, and the alarm unit 26 are mounted on the control panel 11.
- the function of the calculation unit 24 is mounted on the central management device 18.
- the correction unit 22 is a part equipped with a function for correcting the door torque measurement value by the measurement unit 21 according to environmental information.
- the measurement unit 21 measures the door torque, for example, during a diagnostic operation.
- the correction unit 22 corrects the door torque measured at this time.
- the correction unit 22 corrects the door torque measurement value by adding an offset value according to the environmental information to the door torque measured by the measurement unit 21.
- the acquisition unit 23 is a part that has a function of acquiring an offset value that the correction unit 22 uses to correct the measurement value of the door torque.
- the acquisition unit 23 acquires environmental information when the measurement unit 21 measures the door torque.
- the acquisition unit 23 acquires environmental information when the measurement unit 21 measures the door torque, for example, from the environmental sensor 20.
- the acquisition unit 23 acquires environmental information during diagnostic operation, for example.
- the calculation unit 24 is a part equipped with a function for calculating an offset value based on environmental information.
- the calculation unit 24 receives environmental information from the acquisition unit 23.
- the calculation unit 24 outputs an offset value calculated based on the received environmental information to the acquisition unit 23.
- the offset value output by the calculation unit 24 is provided to the correction unit 22 via the acquisition unit 23.
- the determination unit 25 determines that the door torque is abnormal when the difference between the door torque value corrected by the correction unit 22 and the reference value is greater than a preset threshold value.
- the determination unit 25 uses, as the reference value, a measurement value measured by the measurement unit 21 when the elevator 1 is first started up after normality is confirmed after the elevator 1 is installed or after maintenance and inspection.
- environmental information when the door torque serving as the reference value is measured may be stored in the diagnosis system 19 together with the reference value.
- the temperature and humidity represented by the environmental information at this time are used as, for example, a reference temperature and reference humidity.
- the determination unit 25 may also use the door torque value corrected by the correction unit 22 based on the environmental information at this time as the reference value.
- the alarm unit 26 is a part equipped with a function for notifying the judgment result when the judgment unit 25 judges an abnormality in the door torque.
- the alarm unit 26 notifies the judgment result to the central management unit 18.
- the alarm from the alarm unit 26 is processed by the management unit 27, which manages information on the status of the elevator 1. Based on the alarm from the alarm unit 26, a response is made, such as dispatching a maintenance worker to the elevator 1 where the abnormality has occurred.
- FIG. 3 and FIG. 3 and 4 are diagrams showing examples of offset values in the diagnostic system 19 according to the first embodiment.
- the offset value depends on the difference between the environmental information when the reference door torque is measured and the environmental information when the door torque of the object to be diagnosed is measured. More specifically, the offset value depends on the difference between the reference temperature and the temperature when the door torque of the object to be diagnosed is measured. The offset value also depends on the difference between the reference humidity and the humidity when the door torque of the object to be diagnosed is measured.
- FIG. 3 an example of the relationship between the offset value and the temperature difference from the reference temperature is shown.
- the horizontal axis represents the temperature difference
- the vertical axis represents the offset value.
- the relationship between the offset value and the temperature difference may be either a linear relationship or a nonlinear relationship.
- the offset value may take either a continuous value or a discrete value with respect to the temperature difference.
- FIG. 4 an example of the relationship between the offset value and the humidity difference from the reference humidity is shown.
- the horizontal axis represents the humidity difference.
- the vertical axis represents the offset value.
- the relationship between the offset value and the humidity difference may be either a linear relationship or a nonlinear relationship.
- the offset value may take a continuous value or a discrete value with respect to the humidity difference.
- the relationship between the offset value and the environmental information may include an interaction that represents a synergistic effect of the temperature difference and the humidity difference.
- the calculation unit 24 calculates the offset value using the environmental information received from the acquisition unit 23, for example, based on the relationship shown in Figures 3 and 4.
- the relationship between the offset value and the environmental information is stored, for example, in the central management device 18 in which the calculation unit 24 is mounted.
- the relationship between the offset value and the environmental information is set, for example, based on a prior test or simulation.
- the relationship between the offset value and the environmental information may be set, for example, as follows, based on the measurement value in the elevator 1. Note that in this example, the relationship between the offset value and the environmental information is calculated in the calculation unit 24.
- the calculation unit 24 acquires, via the acquisition unit 23, the measurement value measured by the measurement unit 21 at the first start of the elevator 1 after the elevator 1 is confirmed to be normal after installation or after maintenance inspection, as a reference value. At this time, the calculation unit 24 also acquires environmental information at the time when the door torque serving as the reference value was measured. As a result, the calculation unit 24 acquires a combination of the reference value and the environmental information. The calculation unit 24 constructs a model representing the relationship between the reference value and the environmental information, for example, by simple regression or multiple regression, based on multiple combinations of the reference value and the environmental information.
- the calculation unit 24 may construct a model representing the relationship between the reference value and the environmental information, for example, by a method such as machine learning, based on multiple combinations of the reference value and the environmental information.
- the calculation unit 24 may also construct a model representing the relationship between the reference value and the environmental information by using the measurement values of other elevators of the elevator 1 in addition. At this time, the calculation unit 24 may also use only the measurement values of other elevators of the same model as the elevator 1 in addition.
- the calculation unit 24 sets the reference temperature and humidity as the reference operating environment, and sets the relationship between the offset value and the environmental information based on the difference between the reference door torque value in the reference operating environment and the reference door torque value in another operating environment.
- FIG. 5 is a flowchart showing an example of the operation of the diagnostic system 19 according to the first embodiment. The process in FIG. 5 is carried out, for example, during a diagnostic operation at a preset timing.
- step S101 the control panel 11 opens or closes the car door panel 14 using the door torque generated by the door drive device 13. At this time, the control panel 11 obtains a measurement value of the door torque from the measurement unit 21.
- the measurement unit 21 measures the value of the door torque generated by the door motor of the door drive device 13 for each certain opening degree between fully closed and fully open of the car door panel 14. In other words, the measurement unit 21 obtains the door torque at each opening degree of the car door panel 14 as a measurement value.
- the processing of the diagnosis system 19 proceeds to step S102.
- step S102 the control panel 11 acquires environmental information from the environmental sensor 20.
- the control panel 11 acquires information on the temperature and humidity of the elevator shaft 2 as the environmental information.
- the processing of the diagnostic system 19 proceeds to step S103.
- step S103 the acquisition unit 23 of the control panel 11 provides the environmental information acquired in step S102 to the calculation unit 24 of the central management unit 18. After that, the processing of the diagnostic system 19 proceeds to step S104.
- the calculation unit 24 calculates an offset value based on the temperature and humidity represented by the environmental information received from the acquisition unit 23. For example, the calculation unit 24 calculates the difference between the temperature and humidity represented by the environmental information and the temperature and humidity in the reference operating environment as a temperature difference and a humidity difference. Using the calculated temperature difference and humidity difference, the calculation unit 24 calculates an offset value based on, for example, the relationships shown in Figures 3 and 4. Here, when the measured value of the door torque is a value for each opening degree of the car door panel 14, the offset value may be set individually for each opening degree, or may be set as a single value averaged over each opening degree. The calculation unit 24 of the central management unit 18 outputs the calculated offset value to the acquisition unit 23 of the control panel 11.
- step S104 the acquisition unit 23 of the control panel 11 acquires the offset value from the calculation unit 24 of the central management unit 18. After that, the processing of the diagnostic system 19 proceeds to step S105.
- step S105 the correction unit 22 corrects the measurement value of the door torque acquired in step S101 with the offset value acquired in step S104.
- the correction unit 22 performs the correction by adding the offset value to the measurement value of the door torque.
- the measurement value of the door torque is a value for each opening degree of the car door panel 14, the correction unit 22 corrects the door torque for each opening degree.
- step S106 the judgment unit 25 performs a process of judging whether or not there is an abnormality in the door torque.
- the judgment unit 25 calculates the difference between the door torque value corrected in step S105 and a preset reference value.
- the reference value at this time is preset, for example, as a reference value in a reference operating environment.
- the judgment unit 25 judges the door torque abnormality when the calculated difference exceeds a preset threshold value.
- the judgment unit 25 calculates the difference from the reference value for each opening degree.
- the judgment unit 25 may judge the door torque abnormality when the difference exceeds a threshold value at any opening degree, or may judge the door torque abnormality when the sum of the differences of each opening degree or the sum of the absolute values of the differences exceeds a threshold value.
- the process of the diagnosis system 19 proceeds to step S107.
- the processing of the diagnostic system 19 ends.
- step S107 the alarm unit 26 of the control panel 11 notifies the management unit 27 of the central management unit 18 of the judgment result in step S106. Based on the notified content, the management unit 27 performs the necessary processing to respond, such as dispatching a maintenance worker to the elevator 1 where the abnormality has occurred. After that, the processing of the diagnosis system 19 ends.
- the diagnosis system 19 includes the measurement unit 21, the acquisition unit 23, the correction unit 22, and the determination unit 25.
- the measurement unit 21 measures the door torque when the door of the elevator 1 is opened or closed.
- the acquisition unit 23 acquires an offset value for correcting the measurement value of the door torque by the measurement unit 21 based on environmental information when the measurement unit 21 measures the door torque.
- the environmental information includes at least one of temperature and humidity information.
- the correction unit 22 corrects the measurement value of the door torque by the measurement unit 21 with the offset value acquired by the acquisition unit 23.
- the determination unit 25 judges an abnormality in the door torque when the difference between the door torque value corrected by the correction unit 22 and a preset reference value is greater than a preset threshold value.
- the diagnostic method includes a measurement step, an acquisition step, a correction step, and a judgment step.
- the measurement step is a step of measuring the door torque when the door of the elevator 1 is opened or closed.
- the acquisition step is a step of acquiring an offset value for correcting the measurement value of the door torque in the measurement step based on environmental information when the door torque is measured in the measurement step.
- the correction step is a step of correcting the measurement value of the door torque in the measurement step by the offset value acquired in the acquisition step.
- the judgment step is a step of judging an abnormality in the door torque when the difference between the door torque value corrected in the correction step and a preset reference value is greater than a preset threshold value.
- the measured value of the door torque is corrected using the offset value acquired based on the environmental information.
- An abnormality in the door torque of the elevator 1 is diagnosed based on the door torque corrected using the offset value. This allows the abnormality in the door torque of the elevator 1 to be diagnosed taking into account the effects of the operating environment.
- changes in physical properties such as dimensions and elasticity may occur due to temperature changes.
- changes in humidity may cause changes in the friction coefficient, etc.
- the door torque of the elevator 1 may be affected by the operating environment, such as temperature and humidity. Since the effects of the operating environment, such as temperature and humidity, are taken into account in the diagnostic system 19, the accuracy of the diagnosis is further improved.
- the diagnostic system 19 also includes an environmental sensor 20.
- the environmental sensor 20 is disposed in the elevator shaft 2 of the elevator 1.
- the environmental sensor 20 measures environmental information.
- the acquisition unit 23 acquires the environmental information from the environmental sensor 20.
- the door torque measurement value is corrected based on the environmental information actually measured in the elevator shaft 2. This allows the effects of the operating environment to be taken into account with greater accuracy, further improving the accuracy of diagnosis in the diagnostic system 19.
- the diagnostic system 19 also includes a calculation unit 24.
- the calculation unit 24 calculates an offset value based on the environmental information received from the acquisition unit 23.
- the acquisition unit 23 acquires the offset value from the calculation unit 24.
- the acquisition unit 23 may acquire the environmental information from an external weather information service.
- the external weather information service may be provided, for example, by a public institution or a weather business that handles weather information.
- the acquisition unit 23 acquires weather information for the location of the building to which the elevator 1 is applied, for example, via the communication network 17.
- the acquisition unit 23 acquires, for example, temperature and humidity information as the weather information.
- the acquisition unit 23 may acquire weather information such as sunny or rainy as the weather information.
- the acquisition unit 23 stores in advance environmental information corresponding to each piece of weather information, such as sunny or rainy, for example.
- the acquisition unit 23 acquires an offset value using the corresponding environmental information based on the acquired weather information.
- This configuration makes it possible to apply the diagnostic system 19 even when the elevator is not equipped with an environmental sensor.
- the calculation unit 24 may also be mounted on a computing device external to the diagnostic system 19.
- the computing device may be, for example, one or more server devices connected to the communication network 17.
- the central management device 18 may be an external device included in a different system separated from the diagnostic system 19.
- the central management device 18 equipped with functions such as the calculation unit 24 is an example of a computing device external to the diagnostic system 19.
- Some or all of the functions of the diagnostic system 19, such as the correction unit 22, the acquisition unit 23, the determination unit 25, and the alarm unit 26, may also be mounted on the control panel 11, the remote monitoring device 16, and the central management device 18, as well as other devices of the elevator 1.
- the diagnostic system 19 may also perform diagnosis during normal operation of the elevator 1. For example, the diagnostic system 19 may diagnose whether or not there is an abnormality in the door torque each time the car door panel 14 is opened or closed during normal operation.
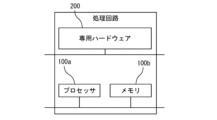
- FIG. 6 is a hardware configuration diagram of a main part of the diagnostic system 19 according to the first embodiment.
- Each processing function in the diagnostic system 19 may be realized by a processing circuit.
- the processing circuit includes at least one processor 100a and at least one memory 100b.
- the processing circuit may include at least one dedicated hardware 200 in addition to or in place of the processor 100a and memory 100b.
- each function of the diagnostic system 19 is realized by software, firmware, or a combination of software and firmware. At least one of the software and firmware is written as a program. The program is stored in the memory 100b. The processor 100a realizes each function of the diagnostic system 19 by reading and executing the program stored in the memory 100b.
- the processor 100a is also called a CPU (Central Processing Unit), processing device, arithmetic unit, microprocessor, microcomputer, or DSP.
- the memory 100b is composed of non-volatile or volatile semiconductor memory such as RAM, ROM, flash memory, EPROM, and EEPROM.
- processing circuitry comprises dedicated hardware 200
- the processing circuitry may be implemented, for example, as a single circuit, a composite circuit, a programmed processor, a parallel programmed processor, an ASIC, an FPGA, or a combination thereof.
- Each processing function in diagnostic system 19 can be realized by a processing circuit. Alternatively, each function of diagnostic system 19 can be realized collectively by a processing circuit. Some of the functions of diagnostic system 19 may be realized by dedicated hardware 200, and other parts may be realized by software or firmware. In this way, the processing circuit realizes each function of diagnostic system 19 by dedicated hardware 200, software, firmware, or a combination of these.
- the content output system disclosed herein can be applied to elevators.
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Elevator Door Apparatuses (AREA)
- Indicating And Signalling Devices For Elevators (AREA)
- Maintenance And Inspection Apparatuses For Elevators (AREA)
Abstract
The present invention provides a diagnosis system and a diagnosis method that can diagnose an abnormality in a door torque of an elevator in consideration of influence of an operation environment. A diagnosis system (19) comprises a measurement unit (21), an acquisition unit (23), a correction unit (22), and a determination unit (25). The measurement unit (21) measures the door torque when a door of an elevator (1) opens or closes. The acquisition unit (23) acquires an offset value which corrects the measured value of the door torque by the measurement unit (21) on the basis of environmental information at the time when the measurement unit (21) measured the door torque. The environmental information includes information relating to at least one of the temperature and the humidity. The correction unit (22) uses the offset value acquired by the acquisition unit (23) to correct the measured value of the door torque by the measurement unit (21). The determination unit (25) determines an abnormality in the door torque when a difference between the value of the door torque corrected by the correction unit (22) and a reference value set in advance is greater than a threshold value set in advance.
Description
本開示は、エレベーターの診断システムおよび診断方法に関する。
This disclosure relates to an elevator diagnostic system and diagnostic method.
特許文献1は、エレベーターの診断システムの例を開示する。診断システムにおいて、エレベーターのドアの開閉の際のドアトルクが計測される。診断システムは、計測されたドアトルクに基づいて異常を判定する。
Patent Document 1 discloses an example of an elevator diagnostic system. In the diagnostic system, the door torque is measured when the elevator door is opened and closed. The diagnostic system determines whether there is an abnormality based on the measured door torque.
特許文献1の診断システムは、温度および湿度などの動作環境によらずに異常の診断を行う。一方、エレベーターのドアトルクは、温度および湿度などの動作環境によって影響を受けることがある。このため、動作環境によって診断の精度が低下する可能性がある。
The diagnostic system of Patent Document 1 diagnoses abnormalities regardless of the operating environment, such as temperature and humidity. On the other hand, elevator door torque can be affected by the operating environment, such as temperature and humidity. For this reason, the accuracy of diagnosis may decrease depending on the operating environment.
本開示は、このような課題の解決に係るものである。本開示は、動作環境の影響を考慮してエレベーターのドアトルクの異常を診断できる診断システムおよび診断方法を提供する。
This disclosure is directed to solving such problems. This disclosure provides a diagnostic system and method that can diagnose abnormalities in elevator door torque while taking into account the effects of the operating environment.
本開示に係るエレベーターの診断システムは、エレベーターのドアの開閉の際のドアトルクを計測する計測部と、前記計測部がドアトルクを計測したときの温度および湿度の少なくとも一方の情報を含む環境情報に基づいて、前記計測部によるドアトルクの計測値を補正するオフセット値を取得する取得部と、前記計測部によるドアトルクの計測値を前記オフセット値によって補正する補正部と、前記補正部が補正したドアトルクの値および予め設定された基準値の差異が予め設定された閾値より大きいときに、ドアトルクの異常を判定する判定部と、を備える。
The elevator diagnostic system according to the present disclosure includes a measurement unit that measures the door torque when the elevator door is opened and closed, an acquisition unit that acquires an offset value for correcting the measurement value of the door torque by the measurement unit based on environmental information including at least one of temperature and humidity information at the time when the measurement unit measures the door torque, a correction unit that corrects the measurement value of the door torque by the measurement unit using the offset value, and a determination unit that determines an abnormality in the door torque when the difference between the door torque value corrected by the correction unit and a preset reference value is greater than a preset threshold value.
本開示に係るエレベーターの診断方法は、エレベーターのドアの開閉の際のドアトルクを計測する計測ステップと、前記計測ステップにおいてドアトルクを計測したときの温度および湿度の少なくとも一方の情報を含む環境情報に基づいて、前記計測ステップにおけるドアトルクの計測値を補正するオフセット値を取得する取得ステップと、前記計測ステップにおけるドアトルクの計測値を前記オフセット値によって補正する補正ステップと、前記補正ステップにおいて補正したドアトルクの値および予め設定された基準値との差異が予め設定された閾値より大きいときに、ドアトルクの異常を判定する判定ステップと、を備える。
The elevator diagnosis method according to the present disclosure includes a measurement step of measuring the door torque when the elevator door is opened or closed, an acquisition step of acquiring an offset value for correcting the measurement value of the door torque in the measurement step based on environmental information including at least one of temperature and humidity information at the time when the door torque is measured in the measurement step, a correction step of correcting the measurement value of the door torque in the measurement step by the offset value, and a determination step of determining an abnormality in the door torque when the difference between the door torque value corrected in the correction step and a preset reference value is greater than a preset threshold value.
本開示に係る診断システムまたは診断方法によれば、動作環境の影響を考慮してエレベーターのドアトルクの異常を診断できる。
The diagnostic system or method disclosed herein can diagnose abnormalities in elevator door torque while taking into account the effects of the operating environment.
本開示の対象を実施するための形態について添付の図面を参照しながら説明する。各図において、同一または相当する部分には同一の符号を付して、重複する説明は適宜に簡略化または省略する。なお、本開示の対象は以下の実施の形態に限定されることなく、本開示の趣旨を逸脱しない範囲において、実施の形態の任意の構成要素の変形、または実施の形態の任意の構成要素の省略が可能である。
The following describes the embodiments for implementing the subject matter of this disclosure with reference to the attached drawings. In each drawing, identical or corresponding parts are given the same reference numerals, and duplicate descriptions are appropriately simplified or omitted. Note that the subject matter of this disclosure is not limited to the following embodiments, and any of the components of the embodiments may be modified or omitted without departing from the spirit of this disclosure.
実施の形態1.
図1は、実施の形態1に係るエレベーター1の構成図である。Embodiment 1.
FIG. 1 is a configuration diagram of anelevator 1 according to the first embodiment.
図1は、実施の形態1に係るエレベーター1の構成図である。
FIG. 1 is a configuration diagram of an
エレベーター1は、例えば複数の階床を有する建物に適用される。建物において、エレベーター1の昇降路2が設けられる。昇降路2は、複数の階床にわたる上下方向に長い空間である。建物の各々の階床において、エレベーター1の乗場3が設けられる。乗場3は、昇降路2に通じる場所である。各々の階床の乗場3において、乗場ドア4が設けられる。乗場ドア4は、乗場ドアパネル5と、乗場敷居6と、を備える。乗場ドアパネル5は、昇降路2および乗場3を区画する。乗場ドアパネル5は、乗場敷居6に沿って開閉する。エレベーター1は、巻上機7と、主ロープ8と、かご9と、釣合い錘10と、制御盤11と、を備える。
The elevator 1 is applied, for example, to a building having multiple floors. A hoistway 2 for the elevator 1 is provided in the building. The hoistway 2 is a long space in the vertical direction that spans multiple floors. A landing 3 for the elevator 1 is provided on each floor of the building. The landing 3 is a place that leads to the hoistway 2. A landing door 4 is provided at the landing 3 on each floor. The landing door 4 includes a landing door panel 5 and a landing threshold 6. The landing door panel 5 separates the hoistway 2 and the landing 3. The landing door panel 5 opens and closes along the landing threshold 6. The elevator 1 includes a hoisting machine 7, a main rope 8, a car 9, a counterweight 10, and a control panel 11.
巻上機7は、例えば昇降路2の上部または下部などに配置される。例えば昇降路2の上方などにエレベーター1の機械室が設けられる場合に、巻上機7は、機械室に配置されてもよい。巻上機7は、駆動力を発生させるモーターと、モーターが発生させる駆動力によって回転するシーブと、を備える。
The hoisting machine 7 is arranged, for example, at the top or bottom of the elevator shaft 2. For example, if a machine room for the elevator 1 is provided above the elevator shaft 2, the hoisting machine 7 may be arranged in the machine room. The hoisting machine 7 includes a motor that generates a driving force and a sheave that rotates by the driving force generated by the motor.
主ロープ8は、巻上機7のシーブに巻き掛けられる。主ロープ8は、巻上機7のシーブの一方側においてかご9の荷重を支持する。主ロープ8は、巻上機7のシーブの他方側において釣合い錘10の荷重を支持する。主ロープ8は、巻上機7のモーターが発生させる駆動力によって、巻上機7のシーブに巻き上げられるように、または巻上機7のシーブから繰り出されるように移動する。
The main rope 8 is wound around the sheave of the hoist 7. The main rope 8 supports the load of the cage 9 on one side of the sheave of the hoist 7. The main rope 8 supports the load of the counterweight 10 on the other side of the sheave of the hoist 7. The main rope 8 moves so as to be wound up into the sheave of the hoist 7 or unwound from the sheave of the hoist 7 by the driving force generated by the motor of the hoist 7.
かご9は、昇降路2を上下方向に走行することでエレベーター1の利用者などを複数の階床の間で輸送する装置である。かご9は、かごドア12を備える。かごドア12は、ドア駆動装置13と、かごドアパネル14と、かご敷居15と、を備える。ドア駆動装置13は、駆動力を発生させるドアモーターを備える。かごドアパネル14は、かご9の内部および外部を区画する。かごドアパネル14は、ドア駆動装置13のドアモーターが発生させる駆動力によって、かご敷居15に沿って開閉する。かごドアパネル14は、かご9がいずれかの階床に停止するときに、当該階床の乗場ドアパネル5を連動させて開閉する。釣合い錘10は、巻上機7のシーブの両側にかかる荷重の釣合いをかご9との間でとる装置である。かご9および釣合い錘10は、主ロープ8の移動に連動して昇降路2を上下方向において互いに反対方向に走行する。
The car 9 is a device that transports users of the elevator 1 between multiple floors by traveling up and down the hoistway 2. The car 9 is equipped with a car door 12. The car door 12 is equipped with a door drive device 13, a car door panel 14, and a car threshold 15. The door drive device 13 is equipped with a door motor that generates a driving force. The car door panel 14 divides the inside and outside of the car 9. The car door panel 14 opens and closes along the car threshold 15 by the driving force generated by the door motor of the door drive device 13. When the car 9 stops at any floor, the car door panel 14 opens and closes in conjunction with the landing door panel 5 of that floor. The counterweight 10 is a device that balances the load applied to both sides of the sheave of the hoisting machine 7 with the car 9. The car 9 and the counterweight 10 travel in opposite directions to each other in the up and down direction in the hoistway 2 in conjunction with the movement of the main rope 8.
制御盤11は、エレベーター1の動作を制御する装置である。制御盤11は、例えば昇降路2の上部または下部などに配置される。例えば昇降路2の上方などにエレベーター1の機械室が設けられる場合に、制御盤11は、機械室に配置されてもよい。制御盤11が制御するエレベーター1の動作は、例えばかご9の走行などを含む。制御盤11は、エレベーター1の制御信号を出力しうるように、また、エレベーター1の状態の情報を取得しうるように、巻上機7およびかご9に接続される。
The control panel 11 is a device that controls the operation of the elevator 1. The control panel 11 is arranged, for example, at the top or bottom of the hoistway 2. For example, if a machine room for the elevator 1 is provided above the hoistway 2, the control panel 11 may be arranged in the machine room. The operation of the elevator 1 controlled by the control panel 11 includes, for example, the running of the car 9. The control panel 11 is connected to the hoist 7 and the car 9 so as to be able to output control signals for the elevator 1 and to be able to obtain information on the status of the elevator 1.
エレベーター1において、遠隔監視装置16が適用される。遠隔監視装置16は、エレベーター1の状態の遠隔監視に用いられる装置である。遠隔監視装置16は、エレベーター1の状態の情報を収集しうるように、また、エレベーター1に対する外部からの制御信号を出力しうるように、制御盤11に接続される。遠隔監視装置16が収集した情報は、例えばインターネットまたは電話回線などの通信網17を通じて、中央管理装置18に送信される。中央管理装置18は、エレベーター1の状態の情報を収集して管理する装置である。中央管理装置18は、例えば情報センターなどの拠点に設けられる。中央管理装置18は、例えば1つまたは複数のサーバ装置などによって構成される。中央管理装置18の機能の一部または全部は、クラウドサービス上の処理および記憶のリソースなどによって実装されていてもよい。
A remote monitoring device 16 is applied to the elevator 1. The remote monitoring device 16 is a device used for remotely monitoring the status of the elevator 1. The remote monitoring device 16 is connected to the control panel 11 so as to be able to collect information on the status of the elevator 1 and to be able to output control signals from outside to the elevator 1. The information collected by the remote monitoring device 16 is transmitted to a central management device 18 via a communication network 17, such as the Internet or a telephone line. The central management device 18 is a device that collects and manages information on the status of the elevator 1. The central management device 18 is provided at a base, such as an information center. The central management device 18 is composed of, for example, one or more server devices. Some or all of the functions of the central management device 18 may be implemented by processing and storage resources on a cloud service.
エレベーター1において、診断システム19が適用される。診断システム19は、エレベーター1の異常などの状態を診断するシステムである。診断システム19は、エレベーター1の状態として、ドア駆動装置13のドアモーターが発生させるドアトルクの異常を判定する。診断システム19は、エレベーター1の内部システムであってもよいし、エレベーター1に外部から適用される外部システムであってもよい。診断システム19は、例えば、予め設定されたタイミングにおいて行われるエレベーター1の診断運転において、ドアトルクの異常を判定する。予め設定されたタイミングは、例えば1月に一回などの定期的なタイミングなどである。診断システム19は、環境センサー20と、計測部21と、を備える。
The diagnostic system 19 is applied to the elevator 1. The diagnostic system 19 is a system that diagnoses the state of the elevator 1, such as abnormalities. The diagnostic system 19 determines an abnormality in the door torque generated by the door motor of the door drive device 13 as the state of the elevator 1. The diagnostic system 19 may be an internal system of the elevator 1, or an external system applied to the elevator 1 from the outside. The diagnostic system 19 determines an abnormality in the door torque during a diagnostic operation of the elevator 1 that is performed at a preset timing, for example. The preset timing is a regular timing, such as once a month. The diagnostic system 19 includes an environmental sensor 20 and a measurement unit 21.
環境センサー20は、ドア駆動装置13の動作環境を表す環境情報を計測する機能を搭載する部分である。環境センサー20は、例えば、昇降路2に設けられる。この例において、環境センサー20は、制御盤11の近傍に配置される。環境センサー20は、かご9においてドア駆動装置13の近傍に配置されてもよい。環境情報は、昇降路2の温度および湿度の少なくも一方の情報を含む。この例において、環境情報は、昇降路2の温度および湿度の両方を含む。環境センサー20は、例えば温度および湿度を計測する温湿度センサーなどである。
The environmental sensor 20 is a part equipped with a function for measuring environmental information that represents the operating environment of the door driver 13. The environmental sensor 20 is provided, for example, in the elevator shaft 2. In this example, the environmental sensor 20 is disposed near the control panel 11. The environmental sensor 20 may also be disposed near the door driver 13 in the car 9. The environmental information includes at least one of the temperature and humidity information of the elevator shaft 2. In this example, the environmental information includes both the temperature and humidity of the elevator shaft 2. The environmental sensor 20 is, for example, a temperature and humidity sensor that measures temperature and humidity.
計測部21は、エレベーター1のドアの開閉の際のドアトルクを計測する機能を搭載する部分である。計測部21は、例えば、ドア駆動装置13のドアモーターがかごドアパネル14を開閉させるために発生させるドアトルクを計測する。この例において、計測部21は、ドア駆動装置13に設けられる。
The measurement unit 21 is a part equipped with a function for measuring the door torque when the doors of the elevator 1 are opened and closed. The measurement unit 21 measures, for example, the door torque generated by the door motor of the door drive device 13 to open and close the car door panel 14. In this example, the measurement unit 21 is provided in the door drive device 13.
診断システム19は、環境センサー20が計測する環境情報、および計測部21が計測するドアトルクを用いて、ドアトルクの異常を診断する。
The diagnostic system 19 diagnoses abnormalities in the door torque using the environmental information measured by the environmental sensor 20 and the door torque measured by the measurement unit 21.
図2は、実施の形態1に係る診断システム19の構成を示すブロック図である。
FIG. 2 is a block diagram showing the configuration of the diagnostic system 19 according to the first embodiment.
診断システム19は、補正部22と、取得部23と、算出部24と、判定部25と、発報部26と、を備える。この例において、補正部22、取得部23、判定部25、および発報部26の機能は、制御盤11に搭載される。また、算出部24の機能は、中央管理装置18に搭載される。
The diagnostic system 19 includes a correction unit 22, an acquisition unit 23, a calculation unit 24, a determination unit 25, and an alarm unit 26. In this example, the functions of the correction unit 22, the acquisition unit 23, the determination unit 25, and the alarm unit 26 are mounted on the control panel 11. The function of the calculation unit 24 is mounted on the central management device 18.
補正部22は、計測部21によるドアトルクの計測値に対して、環境情報に応じた補正を行う機能を搭載する部分である。計測部21は、例えば診断運転の際にドアトルクを計測する。補正部22は、このとき計測されたドアトルクの補正を行う。補正部22は、計測部21が計測したドアトルクに、環境情報に応じたオフセット値を加算することで、ドアトルクの計測値の補正を行う。
The correction unit 22 is a part equipped with a function for correcting the door torque measurement value by the measurement unit 21 according to environmental information. The measurement unit 21 measures the door torque, for example, during a diagnostic operation. The correction unit 22 corrects the door torque measured at this time. The correction unit 22 corrects the door torque measurement value by adding an offset value according to the environmental information to the door torque measured by the measurement unit 21.
取得部23は、補正部22がドアトルクの計測値の補正に用いるオフセット値を取得する機能を搭載する部分である。取得部23は、計測部21がドアトルクを計測するときの環境情報を取得する。取得部23は、例えば環境センサー20から、計測部21がドアトルクを計測したときの環境情報を取得する。取得部23は、例えば診断運転の際の環境情報を取得する。
The acquisition unit 23 is a part that has a function of acquiring an offset value that the correction unit 22 uses to correct the measurement value of the door torque. The acquisition unit 23 acquires environmental information when the measurement unit 21 measures the door torque. The acquisition unit 23 acquires environmental information when the measurement unit 21 measures the door torque, for example, from the environmental sensor 20. The acquisition unit 23 acquires environmental information during diagnostic operation, for example.
算出部24は、環境情報に基づいてオフセット値を算出する機能を搭載する部分である。算出部24は、取得部23から環境情報を受け付ける。算出部24は、受け付けた環境情報に基づいて算出したオフセット値を、取得部23に出力する。算出部24が出力するオフセット値は、取得部23を通じて補正部22に提供される。
The calculation unit 24 is a part equipped with a function for calculating an offset value based on environmental information. The calculation unit 24 receives environmental information from the acquisition unit 23. The calculation unit 24 outputs an offset value calculated based on the received environmental information to the acquisition unit 23. The offset value output by the calculation unit 24 is provided to the correction unit 22 via the acquisition unit 23.
判定部25は、補正部22が補正したドアトルクの値および基準値の差異が予め設定された閾値より大きいときに、ドアトルクの異常を判定する。判定部25は、基準値として、例えばエレベーター1の設置後または保守点検後などの正常が確認された後の、エレベーター1の最初の起動の際に計測部21が計測する計測値などを用いる。ここで、基準値となるドアトルクが計測された際の環境情報は、診断システム19において当該基準値とあわせて記憶されていてもよい。このときの環境情報が表す温度および湿度は、例えば基準温度および基準湿度として用いられる。また、判定部25は、このときの環境情報に基づいて補正部22が補正したドアトルクの値を基準値として用いてもよい。
The determination unit 25 determines that the door torque is abnormal when the difference between the door torque value corrected by the correction unit 22 and the reference value is greater than a preset threshold value. The determination unit 25 uses, as the reference value, a measurement value measured by the measurement unit 21 when the elevator 1 is first started up after normality is confirmed after the elevator 1 is installed or after maintenance and inspection. Here, environmental information when the door torque serving as the reference value is measured may be stored in the diagnosis system 19 together with the reference value. The temperature and humidity represented by the environmental information at this time are used as, for example, a reference temperature and reference humidity. The determination unit 25 may also use the door torque value corrected by the correction unit 22 based on the environmental information at this time as the reference value.
発報部26は、判定部25がドアトルクの異常を判定するときに、判定結果の報知を行う機能を搭載する部分である。この例において、発報部26は、判定結果を中央管理装置18に報知する。中央管理装置18において、発報部26からの発報は、エレベーター1の状態の情報を管理する管理部27において処理される。発報部26からの発報に基づいて、例えば異常が発生したエレベーター1への保守員の派遣などの対応が行われる。
The alarm unit 26 is a part equipped with a function for notifying the judgment result when the judgment unit 25 judges an abnormality in the door torque. In this example, the alarm unit 26 notifies the judgment result to the central management unit 18. In the central management unit 18, the alarm from the alarm unit 26 is processed by the management unit 27, which manages information on the status of the elevator 1. Based on the alarm from the alarm unit 26, a response is made, such as dispatching a maintenance worker to the elevator 1 where the abnormality has occurred.
続いて、図3および図4を用いて、診断システム19におけるオフセット値の例を説明する。
図3および図4は、実施の形態1に係る診断システム19におけるオフセット値の例を示す図である。 Next, an example of the offset value in thediagnostic system 19 will be described with reference to FIG. 3 and FIG.
3 and 4 are diagrams showing examples of offset values in thediagnostic system 19 according to the first embodiment.
図3および図4は、実施の形態1に係る診断システム19におけるオフセット値の例を示す図である。 Next, an example of the offset value in the
3 and 4 are diagrams showing examples of offset values in the
この例において、オフセット値は、基準値となるドアトルクが計測された際の環境情報および診断対象のドアトルクが計測された際の環境情報の差異に依存する。より具体的には、オフセット値は、基準温度および診断対象のドアトルクが計測された際の温度の差分に依存する。また、オフセット値は、基準湿度および診断対象のドアトルクが計測された際の湿度の差分に依存する。
In this example, the offset value depends on the difference between the environmental information when the reference door torque is measured and the environmental information when the door torque of the object to be diagnosed is measured. More specifically, the offset value depends on the difference between the reference temperature and the temperature when the door torque of the object to be diagnosed is measured. The offset value also depends on the difference between the reference humidity and the humidity when the door torque of the object to be diagnosed is measured.
図3において、オフセット値と基準温度からの温度差分との関係の例が示される。図3のグラフにおいて、横軸は温度差分を表す。縦軸はオフセット値を表す。なお、オフセット値および温度差分の関係は、線形な関係または非線形な関係のいずれであってもよい。また、オフセット値は、温度差分に対して、連続値を取ってもよいし、離散値を取ってもよい。
In FIG. 3, an example of the relationship between the offset value and the temperature difference from the reference temperature is shown. In the graph in FIG. 3, the horizontal axis represents the temperature difference, and the vertical axis represents the offset value. Note that the relationship between the offset value and the temperature difference may be either a linear relationship or a nonlinear relationship. Furthermore, the offset value may take either a continuous value or a discrete value with respect to the temperature difference.
図4において、オフセット値と基準湿度からの湿度差分との関係の例が示される。図3のグラフにおいて、横軸は湿度差分を表す。縦軸はオフセット値を表す。なお、オフセット値および湿度差分の関係は、線形な関係または非線形な関係のいずれであってもよい。また、オフセット値は、湿度差分に対して、連続値を取ってもよいし、離散値を取ってもよい。オフセット値および環境情報の関係は、温度差分および湿度差分の相乗効果を表す交互作用などを含んでもよい。
In FIG. 4, an example of the relationship between the offset value and the humidity difference from the reference humidity is shown. In the graph of FIG. 3, the horizontal axis represents the humidity difference. The vertical axis represents the offset value. The relationship between the offset value and the humidity difference may be either a linear relationship or a nonlinear relationship. Furthermore, the offset value may take a continuous value or a discrete value with respect to the humidity difference. The relationship between the offset value and the environmental information may include an interaction that represents a synergistic effect of the temperature difference and the humidity difference.
算出部24は、例えば図3および図4に示される関係に基づいて、取得部23から受け付けた環境情報を用いてオフセット値を算出する。オフセット値および環境情報の関係は、例えば算出部24が搭載された中央管理装置18において記憶される。オフセット値および環境情報の関係は、例えば事前の試験またはシミュレーションなどに基づいて設定される。オフセット値および環境情報の関係は、エレベーター1における計測値に基づいて、例えば次のように設定されてもよい。なお、この例において、オフセット値および環境情報の関係は、算出部24において行われる。
The calculation unit 24 calculates the offset value using the environmental information received from the acquisition unit 23, for example, based on the relationship shown in Figures 3 and 4. The relationship between the offset value and the environmental information is stored, for example, in the central management device 18 in which the calculation unit 24 is mounted. The relationship between the offset value and the environmental information is set, for example, based on a prior test or simulation. The relationship between the offset value and the environmental information may be set, for example, as follows, based on the measurement value in the elevator 1. Note that in this example, the relationship between the offset value and the environmental information is calculated in the calculation unit 24.
算出部24は、取得部23を通じて、エレベーター1の設置後または保守点検後などの正常が確認された後の、エレベーター1の最初の起動の際に計測部21が計測する計測値を基準値として取得する。このとき、算出部24は、基準値となるドアトルクが計測された際の環境情報をあわせて取得する。これにより、算出部24は、基準値および環境情報の組み合わせを取得する。算出部24は、基準値および環境情報の複数の組み合わせに基づいて、例えば単回帰または重回帰などによって、基準値および環境情報の関係を表すモデルを構築する。算出部24は、基準値および環境情報の複数の組み合わせに基づいて、例えば機械学習などの手法によって、基準値および環境情報の関係を表すモデルを構築してもよい。算出部24は、エレベーター1の他のエレベーターにおける計測値を併せて用いて、基準値および環境情報の関係を表すモデルを構築してもよい。このとき、算出部24は、エレベーター1と同機種の他のエレベーターにおける計測値のみを併せて用いてもよい。算出部24は、基準となる温度および湿度を基準動作環境として設定し、基準動作環境におけるドアトルクの基準値および他の動作環境におけるドアトルクの基準値との差分によって、オフセット値および環境情報の関係を設定する。
The calculation unit 24 acquires, via the acquisition unit 23, the measurement value measured by the measurement unit 21 at the first start of the elevator 1 after the elevator 1 is confirmed to be normal after installation or after maintenance inspection, as a reference value. At this time, the calculation unit 24 also acquires environmental information at the time when the door torque serving as the reference value was measured. As a result, the calculation unit 24 acquires a combination of the reference value and the environmental information. The calculation unit 24 constructs a model representing the relationship between the reference value and the environmental information, for example, by simple regression or multiple regression, based on multiple combinations of the reference value and the environmental information. The calculation unit 24 may construct a model representing the relationship between the reference value and the environmental information, for example, by a method such as machine learning, based on multiple combinations of the reference value and the environmental information. The calculation unit 24 may also construct a model representing the relationship between the reference value and the environmental information by using the measurement values of other elevators of the elevator 1 in addition. At this time, the calculation unit 24 may also use only the measurement values of other elevators of the same model as the elevator 1 in addition. The calculation unit 24 sets the reference temperature and humidity as the reference operating environment, and sets the relationship between the offset value and the environmental information based on the difference between the reference door torque value in the reference operating environment and the reference door torque value in another operating environment.
続いて、図5を用いて、診断システム19の動作の例を説明する。
図5は、実施の形態1に係る診断システム19の動作の例を示すフローチャートである。
図5における処理は、例えば予め設定されたタイミングにおける診断運転の際に行われる。 Next, an example of the operation of thediagnostic system 19 will be described with reference to FIG.
FIG. 5 is a flowchart showing an example of the operation of thediagnostic system 19 according to the first embodiment.
The process in FIG. 5 is carried out, for example, during a diagnostic operation at a preset timing.
図5は、実施の形態1に係る診断システム19の動作の例を示すフローチャートである。
図5における処理は、例えば予め設定されたタイミングにおける診断運転の際に行われる。 Next, an example of the operation of the
FIG. 5 is a flowchart showing an example of the operation of the
The process in FIG. 5 is carried out, for example, during a diagnostic operation at a preset timing.
ステップS101において、制御盤11は、ドア駆動装置13が発生させるドアトルクによってかごドアパネル14を開動作または閉動作させる。このとき、制御盤11は、計測部21からドアトルクの計測値を取得する。この例において、計測部21は、かごドアパネル14の全閉および全開の間の一定の開度ごとに、ドア駆動装置13のドアモーターが発生させるドアトルクの値を計測する。すなわち、計測部21は、かごドアパネル14の各開度におけるドアトルクを計測値として取得する。その後、診断システム19の処理は、ステップS102に進む。
In step S101, the control panel 11 opens or closes the car door panel 14 using the door torque generated by the door drive device 13. At this time, the control panel 11 obtains a measurement value of the door torque from the measurement unit 21. In this example, the measurement unit 21 measures the value of the door torque generated by the door motor of the door drive device 13 for each certain opening degree between fully closed and fully open of the car door panel 14. In other words, the measurement unit 21 obtains the door torque at each opening degree of the car door panel 14 as a measurement value. After that, the processing of the diagnosis system 19 proceeds to step S102.
ステップS102において、制御盤11は、環境センサー20から環境情報を取得する。この例において、制御盤11は、環境情報として昇降路2の温度および湿度の情報を取得する。その後、診断システム19の処理は、ステップS103に進む。
In step S102, the control panel 11 acquires environmental information from the environmental sensor 20. In this example, the control panel 11 acquires information on the temperature and humidity of the elevator shaft 2 as the environmental information. After that, the processing of the diagnostic system 19 proceeds to step S103.
ステップS103において、制御盤11の取得部23は、中央管理装置18の算出部24に、ステップS102で取得した環境情報を提供する。その後、診断システム19の処理は、ステップS104に進む。
In step S103, the acquisition unit 23 of the control panel 11 provides the environmental information acquired in step S102 to the calculation unit 24 of the central management unit 18. After that, the processing of the diagnostic system 19 proceeds to step S104.
算出部24は、取得部23から受け付けた環境情報が表す温度および湿度に基づいて、オフセット値を算出する。算出部24は、例えば、環境情報が表す温度および湿度と、基準動作環境における温度および湿度との差異を、温度差分および湿度差分として算出する。算出部24は、算出した温度差分および湿度差分を用いて、例えば図3および図4に示される関係などに基づいてオフセット値を算出する。ここで、ドアトルクの計測値がかごドアパネル14の開度ごとの値である場合に、オフセット値は、各開度に対して個別に設定されていてもよいし、各開度にわたって平均化された単一の値として設定されていてもよい。中央管理装置18の算出部24は、算出したオフセット値を制御盤11の取得部23に出力する。
The calculation unit 24 calculates an offset value based on the temperature and humidity represented by the environmental information received from the acquisition unit 23. For example, the calculation unit 24 calculates the difference between the temperature and humidity represented by the environmental information and the temperature and humidity in the reference operating environment as a temperature difference and a humidity difference. Using the calculated temperature difference and humidity difference, the calculation unit 24 calculates an offset value based on, for example, the relationships shown in Figures 3 and 4. Here, when the measured value of the door torque is a value for each opening degree of the car door panel 14, the offset value may be set individually for each opening degree, or may be set as a single value averaged over each opening degree. The calculation unit 24 of the central management unit 18 outputs the calculated offset value to the acquisition unit 23 of the control panel 11.
ステップS104において、制御盤11の取得部23は、中央管理装置18の算出部24からオフセット値を取得する。その後、診断システム19の処理は、ステップS105に進む。
In step S104, the acquisition unit 23 of the control panel 11 acquires the offset value from the calculation unit 24 of the central management unit 18. After that, the processing of the diagnostic system 19 proceeds to step S105.
ステップS105において、補正部22は、ステップS101で取得したドアトルクの計測値を、ステップS104で取得したオフセット値で補正する。この例において、補正部22は、ドアトルクの計測値にオフセット値を加算することで補正を行う。ここで、ドアトルクの計測値がかごドアパネル14の開度ごとの値である場合に、補正部22は、開度ごとにドアトルクの補正を行う。その後、診断システム19の処理は、ステップS106に進む。
In step S105, the correction unit 22 corrects the measurement value of the door torque acquired in step S101 with the offset value acquired in step S104. In this example, the correction unit 22 performs the correction by adding the offset value to the measurement value of the door torque. Here, when the measurement value of the door torque is a value for each opening degree of the car door panel 14, the correction unit 22 corrects the door torque for each opening degree. After that, the processing of the diagnosis system 19 proceeds to step S106.
ステップS106において、判定部25は、ドアトルクの異常の有無の判定の処理を行う。判定部25は、ステップS105で補正したドアトルクの値と、予め設定された基準値の値との差分を算出する。このときの基準値は、例えば、基準動作環境における基準値などとして予め設定されている。判定部25は、算出した差分が予め設定された閾値を超えるときに、ドアトルクの異常を判定する。ここで、ドアトルクの計測値がかごドアパネル14の開度ごとの値である場合に、判定部25は、開度ごとに基準値との差分を算出する。判定部25は、例えば、いずれかの開度において差分が閾値を超えるときにドアトルクの異常を判定してもよいし、各開度の差分の総和または差分の絶対値の総和が閾値を超えるときにドアトルクの異常を判定してもよい。ドアトルクの差分が予め設定された閾値を超えて判定部25がドアトルクの異常を判定するときに、診断システム19の処理は、ステップS107に進む。一方、ドアトルクの差分が予め設定された閾値を超えず判定部25がドアトルクの異常を判定しないときに、診断システム19の処理は、終了する。
In step S106, the judgment unit 25 performs a process of judging whether or not there is an abnormality in the door torque. The judgment unit 25 calculates the difference between the door torque value corrected in step S105 and a preset reference value. The reference value at this time is preset, for example, as a reference value in a reference operating environment. The judgment unit 25 judges the door torque abnormality when the calculated difference exceeds a preset threshold value. Here, when the measured value of the door torque is a value for each opening degree of the car door panel 14, the judgment unit 25 calculates the difference from the reference value for each opening degree. The judgment unit 25 may judge the door torque abnormality when the difference exceeds a threshold value at any opening degree, or may judge the door torque abnormality when the sum of the differences of each opening degree or the sum of the absolute values of the differences exceeds a threshold value. When the difference of the door torque exceeds the preset threshold value and the judgment unit 25 judges the door torque abnormality, the process of the diagnosis system 19 proceeds to step S107. On the other hand, when the difference in door torque does not exceed the preset threshold value and the determination unit 25 does not determine that the door torque is abnormal, the processing of the diagnostic system 19 ends.
ステップS107において、制御盤11の発報部26は、ステップS106における判定結果を中央管理装置18の管理部27に報知する。管理部27は、報知された内容に基づいて、異常が発生したエレベーター1への保守員の派遣などの対応に必要な処理を行う。その後、診断システム19の処理は、終了する。
In step S107, the alarm unit 26 of the control panel 11 notifies the management unit 27 of the central management unit 18 of the judgment result in step S106. Based on the notified content, the management unit 27 performs the necessary processing to respond, such as dispatching a maintenance worker to the elevator 1 where the abnormality has occurred. After that, the processing of the diagnosis system 19 ends.
以上に説明したように、実施の形態1に係る診断システム19は、計測部21と、取得部23と、補正部22と、判定部25と、を備える。計測部21は、エレベーター1のドアの開閉の際のドアトルクを計測する。取得部23は、計測部21がドアトルクを計測したときの環境情報に基づいて、計測部21によるドアトルクの計測値を補正するオフセット値を取得する。環境情報は、温度および湿度の少なくとも一方の情報を含む。補正部22は、計測部21によるドアトルクの計測値を、取得部23が取得するオフセット値によって補正する。判定部25は、補正部22が補正したドアトルクの値および予め設定された基準値の差異が、予め設定された閾値より大きいときに、ドアトルクの異常を判定する。
また、実施の形態1に係る診断方法は、計測ステップと、取得ステップと、補正ステップと、判定ステップと、を備える。計測ステップは、エレベーター1のドアの開閉の際のドアトルクを計測するステップである。取得ステップは、計測ステップにおいてドアトルクを計測したときの環境情報に基づいて、計測ステップにおけるドアトルクの計測値を補正するオフセット値を取得するステップである。補正ステップは、計測ステップにおけるドアトルクの計測値を、取得ステップにおいて取得したオフセット値によって補正するステップである。判定ステップは、補正ステップにおいて補正したドアトルクの値、および予め設定された基準値との差異が予め設定された閾値より大きいときに、ドアトルクの異常を判定するステップである。 As described above, thediagnosis system 19 according to the first embodiment includes the measurement unit 21, the acquisition unit 23, the correction unit 22, and the determination unit 25. The measurement unit 21 measures the door torque when the door of the elevator 1 is opened or closed. The acquisition unit 23 acquires an offset value for correcting the measurement value of the door torque by the measurement unit 21 based on environmental information when the measurement unit 21 measures the door torque. The environmental information includes at least one of temperature and humidity information. The correction unit 22 corrects the measurement value of the door torque by the measurement unit 21 with the offset value acquired by the acquisition unit 23. The determination unit 25 judges an abnormality in the door torque when the difference between the door torque value corrected by the correction unit 22 and a preset reference value is greater than a preset threshold value.
Moreover, the diagnostic method according to the first embodiment includes a measurement step, an acquisition step, a correction step, and a judgment step. The measurement step is a step of measuring the door torque when the door of theelevator 1 is opened or closed. The acquisition step is a step of acquiring an offset value for correcting the measurement value of the door torque in the measurement step based on environmental information when the door torque is measured in the measurement step. The correction step is a step of correcting the measurement value of the door torque in the measurement step by the offset value acquired in the acquisition step. The judgment step is a step of judging an abnormality in the door torque when the difference between the door torque value corrected in the correction step and a preset reference value is greater than a preset threshold value.
また、実施の形態1に係る診断方法は、計測ステップと、取得ステップと、補正ステップと、判定ステップと、を備える。計測ステップは、エレベーター1のドアの開閉の際のドアトルクを計測するステップである。取得ステップは、計測ステップにおいてドアトルクを計測したときの環境情報に基づいて、計測ステップにおけるドアトルクの計測値を補正するオフセット値を取得するステップである。補正ステップは、計測ステップにおけるドアトルクの計測値を、取得ステップにおいて取得したオフセット値によって補正するステップである。判定ステップは、補正ステップにおいて補正したドアトルクの値、および予め設定された基準値との差異が予め設定された閾値より大きいときに、ドアトルクの異常を判定するステップである。 As described above, the
Moreover, the diagnostic method according to the first embodiment includes a measurement step, an acquisition step, a correction step, and a judgment step. The measurement step is a step of measuring the door torque when the door of the
このような構成により、ドアトルクの計測値は、環境情報に基づいて取得されたオフセット値を用いて補正される。エレベーター1のドアトルクの異常は、オフセット値を用いて補正されたドアトルクに基づいて診断される。これにより、動作環境の影響を考慮してエレベーター1のドアトルクの異常が診断される。乗場敷居6によってガイドされる乗場ドアパネル5の下部のドアシュー、またはかご敷居15によってガイドされるかごドアパネル14の下部のドアシューにおいて、温度変化によって寸法および弾性などの物性値に変化が生じうる。また、これらの敷居およびドアシューにおいて、湿度変化によって摩擦係数などに変化が生じうる。このため、エレベーター1のドアトルクは、温度および湿度などの動作環境によって影響を受けることがある。診断システム19においてこのような温度および湿度などの動作環境の影響が考慮されるため、診断の精度がより高められる。
With this configuration, the measured value of the door torque is corrected using the offset value acquired based on the environmental information. An abnormality in the door torque of the elevator 1 is diagnosed based on the door torque corrected using the offset value. This allows the abnormality in the door torque of the elevator 1 to be diagnosed taking into account the effects of the operating environment. In the door shoe at the bottom of the landing door panel 5 guided by the landing threshold 6, or the door shoe at the bottom of the car door panel 14 guided by the car threshold 15, changes in physical properties such as dimensions and elasticity may occur due to temperature changes. In addition, in these thresholds and door shoes, changes in humidity may cause changes in the friction coefficient, etc. For this reason, the door torque of the elevator 1 may be affected by the operating environment, such as temperature and humidity. Since the effects of the operating environment, such as temperature and humidity, are taken into account in the diagnostic system 19, the accuracy of the diagnosis is further improved.
また、診断システム19は、環境センサー20を備える。環境センサー20は、エレベーター1の昇降路2に配置される。環境センサー20は、環境情報を計測する。取得部23は、環境センサー20から前記環境情報を取得する。
The diagnostic system 19 also includes an environmental sensor 20. The environmental sensor 20 is disposed in the elevator shaft 2 of the elevator 1. The environmental sensor 20 measures environmental information. The acquisition unit 23 acquires the environmental information from the environmental sensor 20.
このような構成により、昇降路2において実際に計測された環境情報に基づいて、ドアトルクの計測値が補正されるようになる。これにより、動作環境の影響がより高い精度で考慮されるため、診断システム19における診断の精度がより高められる。
With this configuration, the door torque measurement value is corrected based on the environmental information actually measured in the elevator shaft 2. This allows the effects of the operating environment to be taken into account with greater accuracy, further improving the accuracy of diagnosis in the diagnostic system 19.
また、診断システム19は、算出部24を備える。算出部24は、取得部23から受け付ける環境情報に基づいてオフセット値を算出する。取得部23は、算出部24からオフセット値を取得する。
The diagnostic system 19 also includes a calculation unit 24. The calculation unit 24 calculates an offset value based on the environmental information received from the acquisition unit 23. The acquisition unit 23 acquires the offset value from the calculation unit 24.
なお、取得部23は、環境情報を外部の気象情報サービスから取得してもよい。外部の気象情報サービスは、例えば気象情報を扱う公的機関または気象事業者などによって提供される。取得部23は、例えば通信網17などを通じて、エレベーター1が適用された建物の位置における気象情報を取得する。取得部23は、気象情報として、例えば温度および湿度の情報を取得する。取得部23は、気象情報として、晴れまたは雨などの天気の情報を取得してもよい。このとき、取得部23は、例えば、晴れまたは雨などの天気の情報ごとに対応する環境情報を予め記憶している。取得部23は、取得した天気の情報に基づいて、対応する環境情報を用いてオフセット値を取得する。
The acquisition unit 23 may acquire the environmental information from an external weather information service. The external weather information service may be provided, for example, by a public institution or a weather business that handles weather information. The acquisition unit 23 acquires weather information for the location of the building to which the elevator 1 is applied, for example, via the communication network 17. The acquisition unit 23 acquires, for example, temperature and humidity information as the weather information. The acquisition unit 23 may acquire weather information such as sunny or rainy as the weather information. At this time, the acquisition unit 23 stores in advance environmental information corresponding to each piece of weather information, such as sunny or rainy, for example. The acquisition unit 23 acquires an offset value using the corresponding environmental information based on the acquired weather information.
このような構成により、エレベーターに環境センサーが設けられていない場合においても、診断システム19の適用が可能になる。
This configuration makes it possible to apply the diagnostic system 19 even when the elevator is not equipped with an environmental sensor.
また、算出部24は、診断システム19の外部の演算装置に搭載されていてもよい。演算装置は、例えば通信網17に接続される1つまたは複数のサーバ装置などによって構成される。中央管理装置18は、診断システム19と分離された別のシステムに含まれる外部装置であってもよい。このとき、算出部24などの機能を搭載する中央管理装置18は、診断システム19の外部の演算装置の例である。また、補正部22、取得部23、判定部25、および発報部26などの診断システム19の機能の一部または全部は、制御盤11、遠隔監視装置16、および中央管理装置18、ならびにこの他のエレベーター1の装置などのいずれに搭載されていてもよい。
The calculation unit 24 may also be mounted on a computing device external to the diagnostic system 19. The computing device may be, for example, one or more server devices connected to the communication network 17. The central management device 18 may be an external device included in a different system separated from the diagnostic system 19. In this case, the central management device 18 equipped with functions such as the calculation unit 24 is an example of a computing device external to the diagnostic system 19. Some or all of the functions of the diagnostic system 19, such as the correction unit 22, the acquisition unit 23, the determination unit 25, and the alarm unit 26, may also be mounted on the control panel 11, the remote monitoring device 16, and the central management device 18, as well as other devices of the elevator 1.
また、診断システム19は、エレベーター1の通常運転において診断を行ってもよい。診断システム19は、例えば、通常運転においてかごドアパネル14が開閉する度に、ドアトルクの異常の有無を診断してもよい。
The diagnostic system 19 may also perform diagnosis during normal operation of the elevator 1. For example, the diagnostic system 19 may diagnose whether or not there is an abnormality in the door torque each time the car door panel 14 is opened or closed during normal operation.
続いて、図6を用いて、診断システム19のハードウェア構成の例について説明する。
図6は、実施の形態1に係る診断システム19の主要部のハードウェア構成図である。 Next, an example of the hardware configuration of thediagnostic system 19 will be described with reference to FIG.
FIG. 6 is a hardware configuration diagram of a main part of thediagnostic system 19 according to the first embodiment.
図6は、実施の形態1に係る診断システム19の主要部のハードウェア構成図である。 Next, an example of the hardware configuration of the
FIG. 6 is a hardware configuration diagram of a main part of the
診断システム19における処理の各機能は、処理回路により実現し得る。処理回路は、少なくとも1つのプロセッサ100aと少なくとも1つのメモリ100bとを備える。処理回路は、プロセッサ100aおよびメモリ100bと共に、あるいはそれらの代用として、少なくとも1つの専用ハードウェア200を備えてもよい。
Each processing function in the diagnostic system 19 may be realized by a processing circuit. The processing circuit includes at least one processor 100a and at least one memory 100b. The processing circuit may include at least one dedicated hardware 200 in addition to or in place of the processor 100a and memory 100b.
処理回路がプロセッサ100aとメモリ100bとを備える場合、診断システム19の各機能は、ソフトウェア、ファームウェア、またはソフトウェアとファームウェアとの組み合わせで実現される。ソフトウェアおよびファームウェアの少なくとも一方は、プログラムとして記述される。そのプログラムはメモリ100bに格納される。プロセッサ100aは、メモリ100bに記憶されたプログラムを読み出して実行することにより、診断システム19の各機能を実現する。
When the processing circuit includes a processor 100a and a memory 100b, each function of the diagnostic system 19 is realized by software, firmware, or a combination of software and firmware. At least one of the software and firmware is written as a program. The program is stored in the memory 100b. The processor 100a realizes each function of the diagnostic system 19 by reading and executing the program stored in the memory 100b.
プロセッサ100aは、CPU(Central Processing Unit)、処理装置、演算装置、マイクロプロセッサ、マイクロコンピュータ、DSPともいう。メモリ100bは、例えば、RAM、ROM、フラッシュメモリ、EPROM、EEPROMなどの、不揮発性または揮発性の半導体メモリなどにより構成される。
The processor 100a is also called a CPU (Central Processing Unit), processing device, arithmetic unit, microprocessor, microcomputer, or DSP. The memory 100b is composed of non-volatile or volatile semiconductor memory such as RAM, ROM, flash memory, EPROM, and EEPROM.
処理回路が専用ハードウェア200を備える場合、処理回路は、例えば、単一回路、複合回路、プログラム化したプロセッサ、並列プログラム化したプロセッサ、ASIC、FPGA、またはこれらの組み合わせで実現される。
If the processing circuitry comprises dedicated hardware 200, the processing circuitry may be implemented, for example, as a single circuit, a composite circuit, a programmed processor, a parallel programmed processor, an ASIC, an FPGA, or a combination thereof.
診断システム19における処理の各機能は、それぞれ処理回路で実現することができる。あるいは、診断システム19の各機能は、まとめて処理回路で実現することもできる。診断システム19の各機能について、一部を専用ハードウェア200で実現し、他部をソフトウェアまたはファームウェアで実現してもよい。このように、処理回路は、専用ハードウェア200、ソフトウェア、ファームウェア、またはこれらの組み合わせで診断システム19の各機能を実現する。
Each processing function in diagnostic system 19 can be realized by a processing circuit. Alternatively, each function of diagnostic system 19 can be realized collectively by a processing circuit. Some of the functions of diagnostic system 19 may be realized by dedicated hardware 200, and other parts may be realized by software or firmware. In this way, the processing circuit realizes each function of diagnostic system 19 by dedicated hardware 200, software, firmware, or a combination of these.
本開示に係るコンテンツ出力システムは、エレベーターに適用できる。
The content output system disclosed herein can be applied to elevators.
1 エレベーター、 2 昇降路、 3 乗場、 4 乗場ドア、 5 乗場ドアパネル、 6 乗場敷居、 7 巻上機、 8 主ロープ、 9 かご、 10 釣合い錘、 11 制御盤、 12 かごドア、 13 ドア駆動装置、 14 かごドアパネル、 15 かご敷居、 16 遠隔監視装置、 17 通信網、 18 中央管理装置、 19 診断システム、 20 環境センサー、 21 計測部、 22 補正部、 23 取得部、 24 算出部、 25 判定部、 26 発報部、 27 管理部、 100a プロセッサ、 100b メモリ、 200 専用ハードウェア
1. Elevator, 2. Hoistway, 3. Landing, 4. Landing door, 5. Landing door panel, 6. Landing threshold, 7. Hoisting machine, 8. Main rope, 9. Cage, 10. Counterweight, 11. Control panel, 12. Cage door, 13. Door drive device, 14. Cage door panel, 15. Cage threshold, 16. Remote monitoring device, 17. Communication network, 18. Central control device, 19. Diagnostic system, 20. Environmental sensor, 21. Measurement unit, 22. Correction unit, 23. Acquisition unit, 24. Calculation unit, 25. Judgment unit, 26. Reporting unit, 27. Management unit, 100a. Processor, 100b. Memory, 200. Dedicated hardware
Claims (6)
- エレベーターのドアの開閉の際のドアトルクを計測する計測部と、
前記計測部がドアトルクを計測したときの温度および湿度の少なくとも一方の情報を含む環境情報に基づいて、前記計測部によるドアトルクの計測値を補正するオフセット値を取得する取得部と、
前記計測部によるドアトルクの計測値を前記オフセット値によって補正する補正部と、
前記補正部が補正したドアトルクの値および予め設定された基準値の差異が予め設定された閾値より大きいときに、ドアトルクの異常を判定する判定部と、
を備える、エレベーターの診断システム。 A measurement unit that measures a door torque when the elevator door is opened and closed;
an acquisition unit that acquires an offset value for correcting a measurement value of the door torque measured by the measurement unit based on environmental information including at least one of temperature and humidity when the measurement unit measures the door torque;
a correction unit that corrects a measurement value of the door torque by the measurement unit using the offset value;
a determination unit that determines an abnormality in the door torque when a difference between the door torque value corrected by the correction unit and a preset reference value is greater than a preset threshold value;
An elevator diagnostic system comprising: - 前記取得部は、前記環境情報を、外部の気象情報サービスから取得する、
請求項1に記載のエレベーターの診断システム。 The acquisition unit acquires the environmental information from an external weather information service.
The elevator diagnostic system according to claim 1. - 前記エレベーターの昇降路に配置され、前記環境情報を計測する環境センサー
を備え、
前記取得部は、前記環境センサーから前記環境情報を取得する、
請求項1に記載のエレベーターの診断システム。 an environmental sensor disposed in the elevator shaft and configured to measure the environmental information;
The acquisition unit acquires the environmental information from the environmental sensor.
The elevator diagnostic system according to claim 1. - 前記取得部から受け付ける前記環境情報に基づいて前記オフセット値を算出する算出部
を備え、
前記取得部は、前記算出部から前記オフセット値を取得する、
請求項1から請求項3のいずれか一項に記載のエレベーターの診断システム。 a calculation unit that calculates the offset value based on the environmental information received from the acquisition unit,
The acquisition unit acquires the offset value from the calculation unit.
The elevator diagnostic system according to any one of claims 1 to 3. - 前記取得部は、外部の演算装置に前記環境情報を提供し、前記演算装置が前記環境情報に基づいて算出した前記オフセット値を前記演算装置から取得する、
請求項1から請求項3のいずれか一項に記載のエレベーターの診断システム。 The acquisition unit provides the environmental information to an external arithmetic device, and acquires, from the arithmetic device, the offset value calculated by the arithmetic device based on the environmental information.
The elevator diagnostic system according to any one of claims 1 to 3. - エレベーターのドアの開閉の際のドアトルクを計測する計測ステップと、
前記計測ステップにおいてドアトルクを計測したときの温度および湿度の少なくとも一方の情報を含む環境情報に基づいて、前記計測ステップにおけるドアトルクの計測値を補正するオフセット値を取得する取得ステップと、
前記計測ステップにおけるドアトルクの計測値を前記オフセット値によって補正する補正ステップと、
前記補正ステップにおいて補正したドアトルクの値および予め設定された基準値との差異が予め設定された閾値より大きいときに、ドアトルクの異常を判定する判定ステップと、
を備える、エレベーターの診断方法。 A measurement step of measuring a door torque when an elevator door is opened or closed;
an acquisition step of acquiring an offset value for correcting the measurement value of the door torque in the measurement step based on environmental information including at least one of temperature and humidity information at the time when the door torque is measured in the measurement step;
a correction step of correcting a measurement value of the door torque in the measurement step by the offset value;
a determination step of determining an abnormality in the door torque when a difference between the door torque value corrected in the correction step and a preset reference value is greater than a preset threshold value;
The elevator diagnostic method includes:
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/039289 WO2024084684A1 (en) | 2022-10-21 | 2022-10-21 | Elevator diagnosis system and diagnosis method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/039289 WO2024084684A1 (en) | 2022-10-21 | 2022-10-21 | Elevator diagnosis system and diagnosis method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024084684A1 true WO2024084684A1 (en) | 2024-04-25 |
Family
ID=90737204
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/039289 WO2024084684A1 (en) | 2022-10-21 | 2022-10-21 | Elevator diagnosis system and diagnosis method |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2024084684A1 (en) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011063404A (en) * | 2009-09-18 | 2011-03-31 | Toshiba Elevator Co Ltd | Door control device of elevator |
| JP2012240789A (en) * | 2011-05-19 | 2012-12-10 | Toshiba Elevator Co Ltd | Elevator door control device |
| JP2013170031A (en) * | 2012-02-20 | 2013-09-02 | Toshiba Elevator Co Ltd | Elevator door remote check operation system |
| JP2016074531A (en) * | 2014-10-08 | 2016-05-12 | 株式会社日立ビルシステム | Elevator inspection device |
| WO2022091376A1 (en) * | 2020-10-30 | 2022-05-05 | 三菱電機ビルテクノサービス株式会社 | Elevator failure diagnosis device |
| WO2022219820A1 (en) * | 2021-04-16 | 2022-10-20 | 三菱電機ビルソリューションズ株式会社 | Elevator motor abnormality detection system |
-
2022
- 2022-10-21 WO PCT/JP2022/039289 patent/WO2024084684A1/en unknown
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011063404A (en) * | 2009-09-18 | 2011-03-31 | Toshiba Elevator Co Ltd | Door control device of elevator |
| JP2012240789A (en) * | 2011-05-19 | 2012-12-10 | Toshiba Elevator Co Ltd | Elevator door control device |
| JP2013170031A (en) * | 2012-02-20 | 2013-09-02 | Toshiba Elevator Co Ltd | Elevator door remote check operation system |
| JP2016074531A (en) * | 2014-10-08 | 2016-05-12 | 株式会社日立ビルシステム | Elevator inspection device |
| WO2022091376A1 (en) * | 2020-10-30 | 2022-05-05 | 三菱電機ビルテクノサービス株式会社 | Elevator failure diagnosis device |
| WO2022219820A1 (en) * | 2021-04-16 | 2022-10-20 | 三菱電機ビルソリューションズ株式会社 | Elevator motor abnormality detection system |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7823706B2 (en) | Condition monitoring system | |
| EP1472169A1 (en) | Method and arrangement for telemonitoring an elevator | |
| JP2008230742A (en) | Maintenance control system of elevator | |
| JP6565781B2 (en) | Elevator door open / close diagnosis system | |
| JP2009220999A (en) | Door diagnosing device of elevator | |
| JP6479949B1 (en) | Elevator door abnormality diagnosis system and abnormality diagnosis method | |
| JP5985057B2 (en) | Door device and door control method | |
| US20170008734A1 (en) | Elevator tension member stiffness estimation and monitoring | |
| EP3363758A1 (en) | Mechanism for monitoring operation of passenger transport device | |
| JP2007070102A (en) | Diagnostic device for elevator door | |
| JP2009040586A (en) | Elevator rope diagnostic system | |
| JPWO2020031284A1 (en) | Elevator diagnostic system | |
| WO2024084684A1 (en) | Elevator diagnosis system and diagnosis method | |
| JP2771454B2 (en) | Elevator running performance diagnostic device | |
| JP7197059B2 (en) | Elevator system and inspection terminal | |
| WO2021144932A1 (en) | Elevator determination device | |
| JP7284735B2 (en) | ELEVATOR DIAGNOSTIC DEVICE AND ELEVATOR DIAGNOSTIC METHOD | |
| JP5535441B2 (en) | Elevator control operation device | |
| CN116348406B (en) | Fault diagnosis device for elevator | |
| JP4804777B2 (en) | Elevator equipment | |
| WO2021260795A1 (en) | Diagnostic system for diagnosing detection state of elevator door situation detection device | |
| WO2024042642A1 (en) | Deformation detection system and deformation detection method for elevator guide rail | |
| JP7392892B1 (en) | elevator door control device | |
| KR20130027328A (en) | Elevator door system and control method thereof | |
| JP6893442B2 (en) | Elevator system |