WO2024084639A1 - モータ制御装置、及び電動パワーステアリング装置 - Google Patents
モータ制御装置、及び電動パワーステアリング装置 Download PDFInfo
- Publication number
- WO2024084639A1 WO2024084639A1 PCT/JP2022/039025 JP2022039025W WO2024084639A1 WO 2024084639 A1 WO2024084639 A1 WO 2024084639A1 JP 2022039025 W JP2022039025 W JP 2022039025W WO 2024084639 A1 WO2024084639 A1 WO 2024084639A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- command value
- voltage
- current command
- control device
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images










Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/22—Current control, e.g. using a current control loop
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0472—Controlling the motor for damping vibrations
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/05—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation specially adapted for damping motor oscillations, e.g. for reducing hunting
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/10—Arrangements for controlling torque ripple, e.g. providing reduced torque ripple
Definitions
- This disclosure relates to a motor control device and an electric power steering device.
- the voltage command value in order to suppress voltage saturation, is corrected so that the magnitude of the voltage vector is equal to or less than the voltage guard value.
- the shape of the voltage command value is forcibly corrected to the voltage guard value to suppress voltage saturation.
- the present disclosure has been made to solve the above problems, and its purpose is to provide a motor control device and an electric power steering device that can suppress abnormal noise and vibration of the motor caused by voltage disturbances, even if some voltage disturbance occurs at an operating point near the limited current command value.
- one aspect of the present disclosure is a motor control device that controls the current supply to a motor by vector control, and includes a current command value calculation unit that generates a current command value in a dq coordinate system based on a command value of the motor, a current command value limiting unit that limits the current command value in the dq coordinate system generated by the current command value calculation unit and outputs a current limit command value that is the current command value in the dq coordinate system after the limiting, and a controller that calculates a voltage command value for the motor by feedback control of the current limit command value, and the current command value limiting unit limits the current command value in the dq coordinate system based on the DC bus voltage and the voltage command value so that the operating point has a set voltage margin with respect to the voltage limit circle in the dq coordinate system.
- Another aspect of the present disclosure is an electric power steering device that includes the motor control device described above, the motor that assists steering, and a torque sensor that detects the steering torque of the steering, and the motor control device controls the motor using the steering assist command corresponding to the steering torque detected by the torque sensor as a command value for the motor.
- FIG. 1 is a block diagram showing an example of a motor control device according to a first embodiment
- FIG. 4 is a block diagram showing an example of a current command value limiting unit in the first embodiment
- FIG. 2 is a first diagram illustrating the operation of the motor control device according to the first embodiment.
- FIG. 4 is a second diagram illustrating the operation of the motor control device in the first embodiment.
- FIG. 11 is a third diagram illustrating the operation of the motor control device in the first embodiment.
- FIG. 4 is a fourth diagram illustrating the operation of the motor control device in the first embodiment.
- FIG. 11 is a block diagram showing an example of a motor control device according to a second embodiment.
- FIG. 11 is a block diagram showing an example of a current command value limiting unit according to a second embodiment.
- FIG. 13A to 13C are diagrams illustrating the operation of a motor control device according to a third embodiment.
- FIG. 13 is a block diagram showing an example of an electric power steering device according to a fourth embodiment.
- 13 is a flowchart showing an example of the operation of the electric power steering device according to the fourth embodiment.
- FIG. 1 is a block diagram showing an example of a motor control device 1 according to the first embodiment.
- the motor control device 1 includes a motor control unit 110 , a motor position detector 2 , and an inverter 5 .
- the motor control device 1 is connected to a DC power supply 3 and a motor 10, and controls the energization of the motor 10 by vector control.
- the DC power source 3 is, for example, a battery, a DC-DC converter, a diode rectifier, a PWM (Pulse Width Modulation) rectifier, etc., and outputs a DC bus voltage Vdc to an inverter 5 described later.
- the DC power source 3 includes all devices that output a DC voltage.
- Motor 10 is a multi-phase brushless motor, for example, a brushless motor having three-phase windings (U, V, W).
- Motor 10 is, for example, a permanent magnet synchronous motor, a film-type synchronous motor, an induction motor, a chronous reluctance motor, etc.
- the motor position detector 2 detects the motor position ⁇ of the motor 10 using, for example, a resolver, an encoder, an MR sensor, etc.
- the inverter 5 applies an AC voltage to the three-phase windings (U, V, W) of the motor 10 based on the DC bus voltage Vdc output from the DC power supply 3.
- the inverter 5 applies a three-phase AC voltage to the motor 10 based on switching signals GS1 to GS6, which are control signals.
- the inverter 5 also includes switching elements 51 to 56 .
- Each of the switching elements 51 to 56 is a semiconductor switch, such as an insulated gate bipolar transistor (IGBT), a bipolar transistor, a metal oxide semiconductor (MOS) power transistor, etc.
- IGBT insulated gate bipolar transistor
- MOS metal oxide semiconductor
- each of the switching elements 51 to 56 has a diode (or a body diode) connected in inverse parallel.
- switching elements 51, 53, and 55 are switching elements of the upper arm (high potential side), and switching elements 52, 54, and 56 are switching elements of the lower arm (low potential side).
- the above-mentioned switching signals GS1, GS3, and GS5 are control signals for turning on and off (putting into a conductive or non-conductive state) the switching elements 51, 53, and 55 in the upper arm (high potential side).
- the above-mentioned switching signals GS2, GS4, and GS6 are control signals for turning on and off (putting them into a conductive or non-conductive state) the switching elements 52, 54, and 56 in the lower arm (low potential side).
- the lower arm switching elements, switching element 52, switching element 54, and switching element 56, are each connected to shunt resistors 41 to 43 in series.
- Shunt resistors 41 to 43 are current detection resistor elements that output end-to-end voltages VRu, VRv, and VRw that are proportional to the currents iu, iv, and iw that flow through motor 10.
- end-to-end voltages VRu, VRv, and VRw are expressed by the following formula (1).
- the resistance values Ru, Rv, and Rw indicate the resistance values of the shunt resistors 41 to 43, respectively.
- the shunt resistors 41 to 43 output the end voltages VRu, VRv, and VRw shown in equation (1) to the motor control unit 110.
- the inverter 5 may be integrated with the motor 10 .
- the motor control unit 110 receives as input a torque command T_ref (an example of a command value for the motor 10) as an external control command, the above-mentioned end-to-end voltages VRu, VRv, and VRw, and the motor position ⁇ , and outputs switching signals GS1 to GS6.
- the motor control unit 110 is a PWM controller that outputs switching signals GS1 to GS6 using a discrete time calculator such as a microcomputer, DSP (Digital Signal Processor), etc.
- the motor control unit 110 includes a DC bus voltage detection unit 6, a current command value calculation unit 7, a current command value limiting unit 8, a speed calculation unit 9, a three-phase/two-phase coordinate converter 11, a controller 12, a current detector 13, a two-phase/three-phase coordinate converter 14, a correction voltage generator 15, a PWM signal generator 16, and a voltage margin calculation unit 17.
- the DC bus voltage detection unit 6 detects the DC bus voltage Vdc using, for example, a voltage sensor or a resistive voltage divider. By detecting the DC bus voltage Vdc using the DC bus voltage detection unit 6, the motor control unit 110 can control the motor in response to fluctuations in the DC bus voltage.
- the speed calculator 9 detects the rotational angular velocity ⁇ of the motor 10 based on the motor position ⁇ of the motor 10 detected by the motor position detector 2.
- the speed calculator 9 outputs the detected rotational angular velocity ⁇ to the current command value calculator 7.
- the current command value calculation unit 7 generates current command values (d-axis current command value Id* and q-axis current command value Iq*) in the dq coordinate system based on the command value of the motor 10.
- the current command value calculation unit 7 calculates the q-axis current command value Iq* and the d-axis current command value Id* using the torque command T_ref as a control command, which is the command value of the motor 10, the DC bus voltage Vdc detected by the DC bus voltage detection unit 6, the motor position ⁇ , and the rotational angular velocity ⁇ of the motor 10 output by the speed calculation unit 9.
- the voltage margin calculation unit 17 (an example of a voltage margin setting unit) outputs the voltage utilization coefficient K to the current command value limiting unit 8 as a value indicating the voltage margin in order to ensure a specific voltage margin set for the voltage limiting circle R1 based on the DC bus voltage Vdc.
- the voltage limiting circle R1 is a voltage limiting circle in the dq coordinate system, and the size of the voltage limiting circle R1 is expressed by the following formula (2).
- the voltage margin is defined by the following equation (3) using the voltage utilization coefficient K.
- the voltage margin calculation unit 17 sets the voltage utilization coefficient K to set the voltage margin according to the formula (3).
- the voltage utilization coefficient K may be a variable value between 0 and 1, for example.
- the voltage margin is variably set depending on the DC bus voltage Vdc as shown in formula (3). That is, the voltage margin calculation unit 17 variably sets the voltage margin by changing the voltage utilization coefficient K.
- the current command value limiting unit 8 limits the current command value (d-axis current command value Id* or/and q-axis current command value Iq*) in the dq coordinate system generated by the current command value calculation unit 7, and outputs the current limit command value (limited d-axis current command value Id** or/and limited q-axis current command value Iq**) which is the current command value in the dq coordinate system after the limiting.
- the current command value limiting unit 8 limits the current command value (d-axis current command value Id* or/and q-axis current command value Iq*) in the dq coordinate system so as to become an operating point with a set voltage margin with respect to the voltage limit circle R1 in the dq coordinate system, based on, for example, the DC bus voltage Vdc detected by the DC bus voltage detection unit 6, the voltage utilization coefficient K output by the voltage margin calculation unit 17, and the voltage command value (voltage command value Vd* and voltage command value Vq*) obtained from the controller 12.
- the current command value in the dq coordinate system includes a d-axis current command value and a q-axis current command value.
- the current command value limiting unit 8 limits at least one of the d-axis current command value Id* and the q-axis current command value Iq* based on the DC bus voltage Vdc detected by the DC bus voltage detecting unit 6 and the voltage command values (the voltage command value Vd* and the voltage command value Vq*) so as to provide an operating point having a voltage margin with respect to the voltage limit circle R1.
- the configuration of the current command value limiting unit 8 will be described in detail with reference to FIG.
- FIG. 2 is a block diagram showing an example of the current command value limiting unit 8 in this embodiment.
- the current command value limiting unit 8 includes a dq axis voltage calculator 81 , a limit voltage calculator 82 , subtractors ( 83 , 85 , 86 ), an integral calculator 84 , a current command value limiter 87 , and a current command value limiter 88 .
- the dq-axis voltage calculator 81 calculates the magnitude Vdq* of the composite voltage vector from the voltage command value Vd* and the voltage command value Vq*.
- the magnitude Vdq* of the composite voltage vector is expressed by the following equation (4).
- the dq-axis voltage calculator 81 calculates the magnitude Vdq* of the composite voltage vector using equation (4).
- the dq-axis voltage calculator 81 outputs the calculated magnitude Vdq* of the composite voltage vector to the subtractor 83.
- the limit voltage calculator 82 calculates the size of the voltage limit circle R2 from the voltage utilization coefficient K and the DC bus voltage Vdc.
- the voltage limit circle R2 is a voltage limit circle in the dq coordinate system, and the size of the voltage limit circle R2 is expressed by the following equation (5).
- the limit voltage calculator 82 calculates the size of the voltage limit circle R2 using equation (5).
- the limit voltage calculator 82 outputs the calculated size of the voltage limit circle R2 to the subtractor 83.
- the subtractor 83 calculates the difference (deviation ⁇ Vdq) between the output of the dq-axis voltage calculator 81 and the output of the limit voltage calculator 82. That is, the subtractor 83 calculates the difference (deviation ⁇ Vdq) between the magnitude Vdq* of the composite voltage vector and the magnitude of the voltage limit circle R2, and outputs it to the integral calculator 84.
- the integrator 84 outputs a d-axis current integrated value Id_sum and a q-axis current integrated value Iq_sum, which are integrated with the deviation ⁇ Vdq, based on the deviation ⁇ Vdq output by the subtractor 83.
- the integrator 84 feeds back and sums the delay values of the d-axis current integrated value Id_sum and the q-axis current integrated value Iq_sum to the output obtained by multiplying the deviation ⁇ Vdq output by the subtractor 83 by an integral gain Kid and an integral gain Kiq in each of the d-axis and q-axis directions.
- the integrator 84 also limits the current of the sum, thereby outputting the d-axis current integrated value Id_sum and the q-axis current integrated value Iq_sum.
- the integrator 84 includes an amplifier 841 , an amplifier 845 , an adder 842 , an adder 846 , a current limiter 843 , a current limiter 847 , a delay element 844 , and a delay element 848 .
- the amplifier 841 amplifies the deviation ⁇ Vdq by an integral gain Kid, and outputs the amplified deviation to the adder 842 .
- the adder 842 adds the output of the delay element 844 and the output of the amplifier 841 , and outputs the sum to the current limiter 843 .
- the current limiter 843 is a current limiter for the d-axis, which limits the output of the adder 842 to a d-axis current upper limit value Id_MAX and a lower limit value Id_MIN, and outputs a d-axis current integrated value Id_sum.
- the delay element 844 delays the output (d-axis current integrated value Id_sum) of the current limiter 843 and outputs the delayed output to the adder 842 .
- the integrator 84 generates the d-axis current integrated value Id_sum by integrating the deviation ⁇ Vdq using the amplifier 841, adder 842, current limiter 843, and delay element 844.
- the amplifier 845 amplifies the deviation ⁇ Vdq by an integral gain Kiq, and outputs the amplified deviation to the adder 846 .
- the adder 846 adds the output of the delay element 848 and the output of the amplifier 845 together, and outputs the result to the current limiter 847 .
- the current limiter 847 is a current limiter for the q-axis, which limits the output of the adder 846 to a q-axis current upper limit value Iq_MAX and a lower limit value Iq_MIN, and outputs a q-axis current integrated value Iq_sum.
- the delay element 848 delays the output (q-axis current integrated value Iq_sum) of the current limiter 847 and outputs it to the adder 846 .
- the integrator 84 generates the q-axis current integrated value Iq_sum by integrating the deviation ⁇ Vdq using the amplifier 845, adder 846, current limiter 847, and delay element 848.
- the subtractor 85 calculates the difference between the d-axis current upper limit value Id_MAX of the dq axes and the d-axis current sum value Id_sum output by the integral calculator 84, and outputs this to the current command value limiter 87 as the d-axis current limit value Id_limit.
- the subtractor 86 calculates the difference between the q-axis current upper limit value Iq_MAX of the dq axes and the q-axis current sum value Iq_sum output by the integral calculator 84, and outputs this to the current command value limiter 88 as the q-axis current limit value Iq_limit.
- the current command value limiter 87 limits the d-axis current command value Id* based on the d-axis current limit value Id_limit output by the subtractor 85, and outputs the limited d-axis current command value Id**.
- the current command value limiter 87 limits the upper limit to the d-axis current limit value Id_limit and the lower limit to the d-axis current lower limit value Id_MIN.
- the current command value limiter 88 limits the q-axis current command value Iq* based on the q-axis current limit value Iq_limit output by the subtractor 86, and outputs the limited q-axis current command value Iq**.
- the current command value limiter 88 limits the upper limit to the q-axis current limit value Iq_limit and the lower limit to the negative value of the q-axis current limit value Iq_limit (-Iq_limit).
- the current detector 13 detects the detected currents (ius, ivs, iws) using the voltages (VRu, VRv, VRw) across the shunt resistors (41, 42, 43) connected in series to each of the switching elements (52, 54, 56) of the lower arm of the inverter 5, and switching signals GS1 to GS6.
- the current detector 13 outputs the detected currents (ius, ivs, iws) to the three-phase/two-phase coordinate converter 11.
- the three-phase/two-phase coordinate converter 11 converts the detected currents (ius, ivs, iws) detected by the current detector 13 and the motor position ⁇ detected by the motor position detector 2 into dq-axis coordinates, and calculates the d-axis detected current Id and the q-axis detected current Iq.
- the three-phase/two-phase coordinate converter 11 outputs the calculated d-axis detected current Id and q-axis detected current Iq to the controller 12.
- the controller 12 calculates the voltage command values (voltage command value Vd* and voltage command value Vq*) on the d and q axes to the motor 10 by feedback control of the current limit command values (the limited d-axis current command value Id** and the limited q-axis current command value Iq**).
- the controller 12 calculates the voltage command value Vd* and the voltage command value Vq* based on, for example, the limited d-axis current command value Id** and the limited q-axis current command value Iq**, as well as the d-axis detected current Id and the q-axis detected current Iq.
- the controller 12 also includes a subtractor 121, a subtractor 123, a d-axis controller 122, and a q-axis controller 124.
- the subtractor 121 calculates the deviation (d-axis current deviation) between the voltage command value Vd* output by the current command value limiting unit 8 and the d-axis detected current Id.
- the subtractor 121 outputs the deviation (d-axis current deviation) to the d-axis controller 122.
- the subtractor 123 calculates the deviation (q-axis current deviation) between the voltage command value Vq* output by the current command value limiting unit 8 and the q-axis detected current Iq.
- the subtractor 123 outputs the deviation (q-axis current deviation) to the q-axis controller 124.
- the d-axis controller 122 uses a control method such as P control or PI control to calculate the voltage command value Vd* so that the d-axis current deviation becomes "0".
- the d-axis controller 122 outputs the calculated voltage command value Vd* to the current command value limiting unit 8 and the two-phase/three-phase coordinate converter 14.
- the q-axis controller 124 uses a control method such as P control or PI control to calculate the voltage command value Vq* so that the q-axis current deviation becomes "0".
- the q-axis controller 124 outputs the calculated voltage command value Vq* to the current command value limiting unit 8 and the two-phase/three-phase coordinate converter 14.
- the two-phase/three-phase coordinate converter 14 performs coordinate conversion based on the voltage command value Vd* and the voltage command value Vq*, and the motor position ⁇ detected by the motor position detector 2, and calculates voltage command values on the three-phase coordinates (u-phase voltage command value vu, v-phase voltage command value vv, and w-phase voltage command value vw).
- the two-phase/three-phase coordinate converter 14 outputs the calculated voltage command values on the three-phase coordinates (u-phase voltage command value vu, v-phase voltage command value vv, and w-phase voltage command value vw) to the modified voltage generator 15.
- the corrected voltage generator 15 generates corrected voltage command values (u-phase corrected voltage command value vu', v-phase corrected voltage command value vv', w-phase corrected voltage command value vw') by equally adding an offset voltage Voffset to the u-phase voltage command value vu, v-phase voltage command value vv , and w-phase voltage command value vw output by the two-phase/three-phase coordinate converter 14 for the purpose of switching to a modulation method that can improve the voltage utilization rate by (2/3 1/2) times.
- the corrected voltage generator 15 outputs the generated corrected voltage command values (u-phase corrected voltage command value vu', v-phase corrected voltage command value vv', w-phase corrected voltage command value vw') to the PWM signal generator 16.
- the modulation method that can improve the voltage utilization rate by applying the offset voltage Voffset in the correction voltage generator 15 is a known technique, so a description thereof will be omitted here.
- the limit voltage calculator 82 shown in FIG. 2 may calculate the size of the voltage limit circle R2 using the following equation (6).
- the PWM signal generator 16 generates switching signals GS1 to GS6 for driving the inverter 5 based on the corrected voltage command values (u-phase corrected voltage command value vu', v-phase corrected voltage command value vv', and w-phase corrected voltage command value vw') output by the corrected voltage generator 15.
- the PWM signal generator 16 outputs the switching signals GS1 to GS6, which are control signals by PWM control, to the inverter 5.
- FIG. 3 and 4 are diagrams for explaining an example of the operation of the motor control device 1 in this embodiment.
- Fig. 3 and Fig. 4 show phasor diagrams based on a known motor voltage equation, and for the sake of simplicity, the explanation will be given assuming a state in which a current command value limit is applied to each axis.
- the phasor diagram in Figure 3 shows an operating point P1 where no current command value limiting is performed.
- the phasor diagram in Figure 4 shows an operating point P2 when the q-axis current command value Iq* is limited to the post-limiting q-axis current command value Iq** so that the operating point is moved from the operating point P1 in Figure 3 to an operating point with a set voltage margin.
- the vector of the term ( ⁇ LqIq*, RIq*) related to the q-axis current command value Iq* shrinks.
- the operating point can be changed from operating point P1 to operating point P2 by limiting the q-axis current command value Iq* to the post-limitation q-axis current command value Iq**, making it possible to set the operating point to one with a set voltage margin.
- FIGS. 5 and 6 are diagrams illustrating another example of the operation of the motor control device 1 in this embodiment.
- FIGS. 5 and 6 show phasor diagrams based on a known motor voltage equation, and for ease of explanation, the explanation is given assuming that the current command value is limited for each axis.
- the phasor diagram in Figure 5 shows an operating point P3 where no current command value limiting is performed.
- the phasor diagram in Figure 6 shows an operating point P4 when the d-axis current command value Id* is limited to the post-limiting d-axis current command value Id** so that the operating point has a set voltage margin from the operating point P3 shown in Figure 5.
- the vector of the term ( ⁇ LdId*, RId*) related to the d-axis current command value Id* is extended.
- the operating point can be changed from operating point P3 to operating point P4 by limiting the d-axis current command value Id* to the post-limitation d-axis current command value Id**, making it possible to set the operating point to one with a set voltage margin.
- the operating point may be changed by restricting it to both the d-axis and the q-axis, rather than just one of them as described above.
- the change in the operating point is a combination of the above-mentioned Figures 4 and 6.
- the motor control device 1 is a motor control device that controls the energization of the motor 10 by vector control, and includes a current command value calculation unit 7, a current command value limiting unit 8, and a controller 12.
- the current command value calculation unit 7 generates current command values in the dq coordinate system (d-axis current command value Id* and q-axis current command value Iq*) based on a command value for the motor 10 (e.g., torque command T_ref).
- the current command value limiting unit 8 limits the current command values in the dq coordinate system (d-axis current command value Id* and q-axis current command value Iq*) generated by the current command value calculation unit 7, and outputs current limit command values (limited d-axis current command value Id** and limited q-axis current command value Iq**), which are the current command values in the dq coordinate system after the limiting.
- the controller 12 calculates the voltage command value (voltage command value Vd* and voltage command value Vq*) for the motor 10 by feedback control of the current limit command value (limited d-axis current command value Id** and limited q-axis current command value Iq**).
- the current command value limiting unit 8 limits the current command value (d-axis current command value Id* and/or q-axis current command value Iq*) in the dq coordinate system based on the DC bus voltage Vdc and the voltage command value (voltage command value Vd* and voltage command value Vq*) so that the operating point has a set voltage margin with respect to the voltage limit circle R1 in the dq coordinate system.
- the motor control device 1 limits the current command values (d-axis current command value Id* and q-axis current command value Iq*) so that the operating point has a voltage margin with respect to the voltage limit circle R1, and therefore voltage saturation does not occur within the range of the voltage margin from the operating point. Furthermore, even if some voltage disturbance occurs at an operating point near the limited current command value, the motor control device 1 according to this embodiment does not perform correction to make the voltage below the voltage guard value as in the conventional technology, and ensures a swing range as a voltage margin. Therefore, the motor control device 1 according to this embodiment can maintain the shape of the voltage command value that can suppress the generated voltage disturbance. As a result, the motor control device 1 according to this embodiment can suppress not only voltage saturation, but also abnormal noise and vibration of the motor caused by the voltage disturbance, even if some voltage disturbance occurs at an operating point near the limited current command value.
- the motor control device 1 also includes a DC bus voltage detection unit 6 that detects the DC bus voltage Vdc.
- the current command value in the dq coordinate system includes a d-axis current command value Id* and a q-axis current command value Iq*.
- the current command value limiting unit 8 limits at least one of the d-axis current command value Id* and the q-axis current command value Iq* based on the DC bus voltage Vdc detected by the DC bus voltage detection unit 6 and the voltage command values (voltage command value Vd* and voltage command value Vq*) so as to provide an operating point with a voltage margin relative to the voltage limit circle R1.
- the motor control device 1 limits at least one of the d-axis current command value Id* and the q-axis current command value Iq* based on the DC bus voltage Vdc, so that it can respond appropriately when the DC bus voltage Vdc changes and suppress abnormal noise and vibration of the motor caused by voltage disturbances.
- the controller 12 outputs voltage command values in the dq coordinate system (voltage command value Vd* and voltage command value Vq*) as voltage command values.
- the current command value limiting unit 8 limits at least one of the d-axis current command value and the q-axis current command value according to the deviation ⁇ Vdq between the value calculated based on the DC bus voltage Vdc and the value K indicating the voltage margin, and the magnitude of the voltage vector indicated by the voltage command values in the dq coordinate system (voltage command value Vd* and voltage command value Vq*).
- the motor control device 1 can suppress abnormal noise and vibration of the motor caused by voltage disturbances using a simple method by using voltage command values in the dq coordinate system (voltage command value Vd* and voltage command value Vq*) as the voltage command values.
- the current command value limiting unit 8 limits at least one of the d-axis current command value and the q-axis current command value according to the integrated value of the deviation ⁇ Vdq.
- the motor control device 1 can suppress sudden changes in the current limit command value (post-limit d-axis current command value Id** and post-limit q-axis current command value Iq**) by limiting using the integrated value, and can more appropriately suppress abnormal noise and vibration of the motor 10.
- the motor control device 1 also includes a voltage margin calculation unit 17 (voltage margin setting unit) that variably sets the voltage margin.
- the current command value limiting unit 8 limits the current command value in the dq coordinate system based on the voltage margin set by the voltage margin calculation unit 17.
- the motor control device 1 can more appropriately suppress abnormal noise and vibration of the motor 10, for example, by variably setting the voltage margin according to the operating state of the motor 10.
- the voltage margin is set based on the DC bus voltage Vdc (see the above-mentioned formula (3)).
- the voltage margin is set based on the DC bus voltage Vdc, and therefore the voltage margin can be appropriately changed and set in accordance with the DC bus voltage Vdc.
- FIG. 7 is a block diagram showing an example of a motor control device 1a according to the second embodiment.
- the motor control device 1a includes a motor control unit 110a, a motor position detector 2, and an inverter 5.
- the motor control unit 110a also includes a DC bus voltage detection unit 6, a current command value calculation unit 7, a current command value limiting unit 8a, a speed calculation unit 9, a three-phase/two-phase coordinate converter, a controller 12a, a current detector 13, a PWM signal generator 16, and a voltage margin calculation unit 17.
- This embodiment differs from the first embodiment in that the processing of a current command value limiting unit 8a is different, and that a controller 12a includes a two-phase/three-phase coordinate converter 14 and a corrected voltage generator 15a.
- a controller 12a includes a two-phase/three-phase coordinate converter 14 and a corrected voltage generator 15a.
- FIG. 7 the same components as those in FIG. 1 are given the same reference numerals, and the description thereof will be omitted.
- the controller 12a outputs, as voltage command values, phase voltage command values corresponding to each phase of the three-phase windings (U, V, W) of the motor 10.
- the controller 12a outputs, as phase voltage command values, corrected voltage command values (u-phase corrected voltage command value vu', v-phase corrected voltage command value vv', w-phase corrected voltage command value vw').
- the controller 12a also includes a subtractor 121, a subtractor 123, a d-axis controller 122, a q-axis controller 124, a two-phase/three-phase coordinate converter 14, and a correction voltage generator 15a.
- the corrected voltage generator 15a adds an offset voltage Voffset, aimed at switching to a modulation method that can improve the voltage utilization rate by (2/3 1/2 ) times, equally to the three phases to the u-phase voltage command value vu, v-phase voltage command value vv, and w-phase voltage command value vw output by the two-phase/three-phase coordinate converter 14.
- the corrected voltage generator 15a further adds a compensation voltage Vcomp for some disturbance voltage equally to the three phases to generate corrected voltage command values (u-phase corrected voltage command value vu', v-phase corrected voltage command value vv', and w-phase corrected voltage command value vw').
- the compensation voltage Vcomp is, for example, a dead time compensation voltage or a compensation voltage intended to suppress a specific order component.
- the corrected voltage generator 15 a outputs the generated corrected voltage command values (u-phase corrected voltage command value vu′, v-phase corrected voltage command value vv′, and w-phase corrected voltage command value vw′) to the PWM signal generator 16 .
- the current command value limiting unit 8a limits the current command value in the dq coordinate system (d-axis current command value Id* or/and q-axis current command value Iq*) generated by the current command value calculation unit 7, and outputs a current limit command value (limited d-axis current command value Id** or/and limited q-axis current command value Iq**) which is the current command value in the dq coordinate system after the limiting.
- the current command value limiting unit 8a limits the current command value in the dq coordinate system (limited d-axis current command value Id** or/and limited q-axis current command value Iq**) based on, for example, the DC bus voltage Vdc detected by the DC bus voltage detection unit 6, the voltage utilization coefficient K output by the voltage margin calculation unit 17, and the corrected voltage command values (u-phase corrected voltage command value vu', v-phase corrected voltage command value vv', w-phase corrected voltage command value vw') obtained by the controller 12a, so as to become an operating point having a set voltage margin with respect to the voltage limit circle R1 in the dq coordinate system.
- the configuration of the current command value limiting unit 8a will be described in detail with reference to FIG.
- FIG. 8 is a block diagram showing an example of the current command value limiting unit 8a in this embodiment.
- the current command value limiting unit 8 a includes a dq axis voltage calculator 81 a, a limit voltage calculator 82, subtractors (83, 85, 86), an integral calculator 84, a current command value limiter 87, and a current command value limiter 88.
- the dq-axis voltage calculator 81a calculates the magnitude Vdq* of the composite voltage vector from the corrected voltage command values (u-phase corrected voltage command value vu', v-phase corrected voltage command value vv', and w-phase corrected voltage command value vw').
- the magnitude Vdq* of the composite voltage vector is expressed by the following equation (7).
- the dq-axis voltage calculator 81a calculates the magnitude Vdq* of the composite voltage vector by using the equation (7).
- the dq-axis voltage calculator 81a outputs the calculated magnitude Vdq* of the composite voltage vector to the subtractor 83.
- the other configuration is similar to that of the current command value limiting unit 8 in the first embodiment, and therefore a description thereof will be omitted here.
- the controller 12a outputs, as voltage command values, phase voltage command values (u-phase corrected voltage command value vu', v-phase corrected voltage command value vv', w-phase corrected voltage command value vw') corresponding to each phase of the three-phase winding (U, V, W) of the motor 10.
- the current command value limiting unit 8a limits at least one of the d-axis current command value Id* and the q-axis current command value Iq* according to the deviation ⁇ Vdq between a calculated value calculated based on the DC bus voltage Vdc and a value indicating the voltage margin (voltage utilization coefficient K) and the magnitude of the composite voltage vector of each interphase voltage calculated based on the phase voltage command values corresponding to each phase (u-phase corrected voltage command value vu', v-phase corrected voltage command value vv', w-phase corrected voltage command value vw').
- the motor control device 1a uses the phase voltage command values of each phase (u-phase corrected voltage command value vu', v-phase corrected voltage command value vv', w-phase corrected voltage command value vw') as the voltage command value, and can limit the current command value taking these into consideration, even if a voltage disturbance occurs or a compensation voltage is applied after, for example, two-phase/three-phase coordinate transformation.
- FIG. 9 is a diagram illustrating the operation of the motor control device 1 (1a) in the third embodiment. 9, a waveform W1 indicates a change in the DC bus voltage Vdc, and a waveform W2 indicates a change in the voltage utilization coefficient K. The horizontal axis of each graph indicates time.
- the voltage margin calculation unit 17 in this embodiment changes the value indicating the voltage margin (voltage utilization coefficient K) based on the DC bus voltage Vdc. For example, at time t1 in FIG. 9 , when the DC bus voltage Vdc falls below the abnormality determination value Vab (becomes equal to or less than the abnormality determination value Vab), the voltage margin calculation unit 17 smoothly changes the voltage utilization coefficient K from a predetermined specific value K1 to “1.0”.
- the voltage margin calculation unit 17 changes the voltage margin (voltage utilization coefficient K) by setting a transition period so as to smoothly change the voltage margin (voltage utilization coefficient K), thereby making a smooth change.
- the voltage margin calculation unit 17 smoothly changes the voltage utilization coefficient K from "1.0" to a specific value K1 that is set in advance.
- the voltage margin calculation unit 17 changes the voltage margin (voltage utilization coefficient K) based on the DC bus voltage Vdc.
- the motor control device 1 (1a) can appropriately change the voltage margin (voltage utilization coefficient K) in accordance with the DC bus voltage Vdc. For example, when the DC bus voltage Vdc drops and an abnormality is detected, the voltage margin calculation unit 17 changes the voltage utilization coefficient K to "1.0", which can essentially disable the function of the current command value limiting unit 8 (8a). Therefore, even if the DC bus voltage Vdc drops, the motor output can be ensured.
- the voltage margin calculation unit 17 changes the voltage margin by providing a transition period so as to smoothly change the voltage margin.
- the motor control device 1 (1a) according to this embodiment can smoothly change the voltage utilization coefficient K, thereby suppressing sudden changes in the current limiting command values (the post-limiting d-axis current command value Id** and the post-limiting q-axis current command value Iq**), and can suppress abnormal noise and vibration of the motor that accompanies changes in the voltage utilization coefficient K.
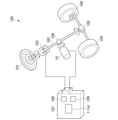
- FIG. 10 is a block diagram showing an example of an electric power steering device 100 according to the fourth embodiment.
- the electric power steering device 100 includes a motor 10, a steering wheel 101, a torque sensor 102, a steering shaft 103, wheels 104, a rack and pinion gear 105, a gear 106, and a control device 107.
- the control device 107 also includes the motor control device 1 (1a) described above, an abnormality detection unit 108, and a vehicle speed information communication device 109.
- the torque sensor 102 detects the steering torque of a driver (not shown).
- the wheels 104 are, for example, wheels (for example, front wheels) that are to be steered of a vehicle such as an automobile.
- steering torque applied to a steering wheel 101 by a driver passes through a torsion bar of a torque sensor 102 and a steering shaft 103, and is transmitted to a rack via a rack-and-pinion gear 105.
- the vehicle speed information communication device 109 measures the vehicle speed, and notifies the motor control device 1 (1a) of the vehicle speed via the network.
- the motor 10 is driven by the motor control device 1 (1a) of the control device 107, and generates an assist force as an output.
- the assist force is transmitted to the steering shaft 103 via the gear 106, and reduces the steering torque applied by the driver when steering.
- the control device 107 calculates an assist command for adjusting the assist force based on the driver's steering torque detected by the torque sensor 102 and the vehicle speed. For example, the control device 107 calculates the assist command as a value proportional to the driver's steering torque. Furthermore, the control device 107 sets the assist command as a torque command that becomes the command value for the motor 10.
- the abnormality detection unit 108 monitors the electric power steering device 100 (control of the motor 10) for abnormalities, and if any functional malfunction is detected, it outputs an abnormality signal to the motor control device 1 (1a) and starts control processing in the event of an abnormality.
- the voltage margin calculation unit 17 when the voltage margin calculation unit 17 detects an abnormality in the control of the motor 10, it changes the voltage margin in accordance with the detected abnormality. For example, when the voltage margin calculation unit 17 receives an abnormality signal output by the abnormality detection unit 108, it changes the voltage utilization coefficient K to "1.0".
- the voltage margin calculation unit 17 in this embodiment changes the voltage margin according to the speed of the vehicle in which the motor control device 1 (1a) is mounted. For example, when the vehicle speed received by the vehicle speed information communication device 109 exceeds a specific vehicle speed that has been determined in advance, the voltage margin calculation unit 17 changes the voltage utilization coefficient K to "1.0". For example, when the vehicle speed received by the vehicle speed information communication device 109 does not exceed a specific vehicle speed that has been determined in advance, the voltage margin calculation unit 17 changes the voltage utilization coefficient K to a specific value.
- FIG. 11 an example of the operation of the voltage margin calculation unit 17 of the electric power steering device 100 is described. Note that the process shown in FIG. 11 is executed periodically.
- the voltage margin calculation unit 17 in this embodiment first determines whether or not an abnormal signal has been detected (step S101). The voltage margin calculation unit 17 determines whether or not an abnormal signal has been detected based on whether or not an abnormal signal output by the abnormality detection unit 108 has been received. If the voltage margin calculation unit 17 detects an abnormal signal (step S101: YES), the process proceeds to step S103. If the voltage margin calculation unit 17 does not detect an abnormal signal (step S101: NO), the process proceeds to step S102.
- step S102 the voltage margin calculation unit 17 determines whether the vehicle speed exceeds a specific vehicle speed. For example, the voltage margin calculation unit 17 determines whether the vehicle speed received from the vehicle speed information communication device 109 exceeds a specific vehicle speed. If the vehicle speed exceeds the specific vehicle speed (step S102: YES), the voltage margin calculation unit 17 advances the process to step S103. If the vehicle speed is equal to or less than the specific vehicle speed (step S102: NO), the voltage margin calculation unit 17 advances the process to step S104.
- the electric power steering device 100 includes the motor control device 1 (1a) described above, the motor 10, and the torque sensor 102.
- the motor 10 assists steering.
- the torque sensor 102 detects the steering torque of the steering.
- the motor control device 1 (1a) controls the motor 10 using a steering assist command corresponding to the steering torque detected by the torque sensor 102 as a command value for the motor 10.
- the electric power steering device 100 has the same effect as the motor control device 1 (1a), and can suppress abnormal noise and vibration of the motor caused by voltage disturbances even if some voltage disturbance occurs at an operating point near the limited current command value.
- the voltage margin calculation unit 17 when the voltage margin calculation unit 17 detects an abnormality in the control of the motor 10, it changes the voltage margin (voltage utilization coefficient K) in accordance with the detected abnormality. For example, when the voltage margin calculation unit 17 detects an abnormality, it changes the voltage margin by changing the voltage utilization coefficient K to "1.0".
- the electric power steering device 100 (motor control device 1 (1a)) according to this embodiment can respond appropriately when an abnormality occurs in the control of the motor 10. For example, when an abnormality is detected, the electric power steering device 100 (motor control device 1 (1a)) can change the voltage utilization coefficient K to "1.0" and disable the current command value limit in order to continue to output the assist torque according to the steering torque as much as possible. As a result, the electric power steering device 100 according to this embodiment can suppress a decrease in motor output due to some kind of functional failure and ensure motor output even when an abnormality occurs.
- the voltage margin calculation unit 17 changes the voltage margin according to the speed of the vehicle on which the motor control device 1 (1a) is mounted. For example, when the vehicle speed exceeds a specific vehicle speed, the voltage margin calculation unit 17 changes the voltage margin by changing the voltage utilization coefficient K to "1.0". For example, when the vehicle speed is equal to or lower than a specific vehicle speed, the voltage margin calculation unit 17 changes the voltage margin by changing the voltage utilization coefficient K to a specific value (a value less than 1.0).
- the electric power steering device 100 (motor control device 1 (1a)) according to this embodiment can also suppress abnormal noise and vibration of the motor 10 by changing the voltage utilization coefficient K to ensure a voltage margin.
- the electric power steering device 100 (motor control device 1 (1a)) according to this embodiment can ensure motor output by changing the voltage utilization coefficient K to eliminate the voltage margin and maximize the motor output so as to enable emergency avoidance.
- an example using an integral calculator 84 has been described, but the present invention is not limited to this.
- a proportional calculator, a differential calculator, etc. may be used, or at least one of the proportional calculator, integral calculator, and differential calculator may be used.
- the voltage utilization coefficient K is changed based on the abnormality signal and the vehicle speed, but this is not limiting.
- the voltage utilization coefficient K may be changed based on, for example, other signals used in the electric power steering, that is, the driver's steering state, such as the steering torque Ts, the steering speed calculated from the rotation speed of the motor 10, etc.
- the stopped and driving states are used as examples of the driving state, other driving states, such as a yaw rate or lateral acceleration signal indicating a turning state, may also be used.
- Each component of the motor control device 1 (1a) described above has an internal computer system.
- a program for implementing the functions of each component of the motor control device 1 (1a) described above may be recorded on a computer-readable recording medium, and the program recorded on the recording medium may be read into a computer system and executed to perform processing in each component of the motor control device 1 (1a) described above.
- "reading a program recorded on a recording medium into a computer system and executing it” includes installing the program into a computer system.
- the "computer system” referred to here includes hardware such as an OS and peripheral devices.
- a “computer system” may include a plurality of computer devices connected via a network including communication lines such as the Internet, WAN, LAN, and dedicated lines.
- a "computer-readable recording medium” refers to portable media such as flexible disks, optical magnetic disks, ROMs, and CD-ROMs, and storage devices such as hard disks built into a computer system.
- the recording medium storing the program may be a non-transitory recording medium such as a CD-ROM.
- the recording medium also includes an internal or external recording medium accessible from a distribution server to distribute the program.
- the program may be divided into multiple parts, downloaded at different times, and then combined in each component of the motor control device 1 (1a), or each divided program may be distributed by a different distribution server.
- the term "computer-readable recording medium” also includes a recording medium that holds a program for a certain period of time, such as a volatile memory (RAM) inside a computer system that becomes a server or client when a program is transmitted over a network.
- the program may also be a recording medium for implementing part of the above-mentioned functions.
- the program may be a so-called difference file (difference program) that can realize the above-mentioned functions in combination with a program already recorded in the computer system.
- integral calculator 87, 88... current command value limiter, 100... electric power steering device, 101... steering wheel, 102... torque sensor, 103... steering shaft, 104... wheel, 105... rack and pinion gear, 106... gear, 107... control device, 108... abnormality detection unit, 109... vehicle speed information communication device, 110... motor control unit, 122... d-axis controller, 124... q-axis controller, 841, 845... amplifier, 842, 846... adder, 843, 847... current limiter, 844, 848... delay element
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Control Of Ac Motors In General (AREA)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/039025 WO2024084639A1 (ja) | 2022-10-20 | 2022-10-20 | モータ制御装置、及び電動パワーステアリング装置 |
| JP2024551140A JPWO2024084639A1 (https=) | 2022-10-20 | 2022-10-20 | |
| EP22962747.6A EP4607786A4 (en) | 2022-10-20 | 2022-10-20 | ENGINE CONTROL DEVICE AND ELECTRIC POWER STEERING DEVICE |
| CN202280100618.8A CN119999073A (zh) | 2022-10-20 | 2022-10-20 | 电动机控制装置及电动助力转向装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/039025 WO2024084639A1 (ja) | 2022-10-20 | 2022-10-20 | モータ制御装置、及び電動パワーステアリング装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024084639A1 true WO2024084639A1 (ja) | 2024-04-25 |
Family
ID=90737194
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/039025 Ceased WO2024084639A1 (ja) | 2022-10-20 | 2022-10-20 | モータ制御装置、及び電動パワーステアリング装置 |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP4607786A4 (https=) |
| JP (1) | JPWO2024084639A1 (https=) |
| CN (1) | CN119999073A (https=) |
| WO (1) | WO2024084639A1 (https=) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08266099A (ja) * | 1994-05-25 | 1996-10-11 | Matsushita Electric Ind Co Ltd | 永久磁石同期電動機の制御装置 |
| JP2001186790A (ja) * | 1999-12-24 | 2001-07-06 | Mitsubishi Electric Corp | 電動パワーステアリング制御装置 |
| JP2009213336A (ja) * | 2008-03-06 | 2009-09-17 | Nissan Motor Co Ltd | モータ制御装置 |
| JP6260502B2 (ja) | 2014-09-16 | 2018-01-17 | 株式会社デンソー | モータ制御装置 |
| WO2020234971A1 (ja) * | 2019-05-20 | 2020-11-26 | 三菱電機株式会社 | 電動機駆動装置、圧縮機駆動装置および冷凍サイクル装置 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101562418B1 (ko) * | 2011-07-05 | 2015-10-22 | 엘에스산전 주식회사 | 매입형 영구자석 동기 전동기의 구동장치 |
-
2022
- 2022-10-20 CN CN202280100618.8A patent/CN119999073A/zh active Pending
- 2022-10-20 JP JP2024551140A patent/JPWO2024084639A1/ja active Pending
- 2022-10-20 EP EP22962747.6A patent/EP4607786A4/en active Pending
- 2022-10-20 WO PCT/JP2022/039025 patent/WO2024084639A1/ja not_active Ceased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08266099A (ja) * | 1994-05-25 | 1996-10-11 | Matsushita Electric Ind Co Ltd | 永久磁石同期電動機の制御装置 |
| JP2001186790A (ja) * | 1999-12-24 | 2001-07-06 | Mitsubishi Electric Corp | 電動パワーステアリング制御装置 |
| JP2009213336A (ja) * | 2008-03-06 | 2009-09-17 | Nissan Motor Co Ltd | モータ制御装置 |
| JP6260502B2 (ja) | 2014-09-16 | 2018-01-17 | 株式会社デンソー | モータ制御装置 |
| WO2020234971A1 (ja) * | 2019-05-20 | 2020-11-26 | 三菱電機株式会社 | 電動機駆動装置、圧縮機駆動装置および冷凍サイクル装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4607786A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4607786A4 (en) | 2025-10-15 |
| EP4607786A1 (en) | 2025-08-27 |
| CN119999073A (zh) | 2025-05-13 |
| JPWO2024084639A1 (https=) | 2024-04-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10300940B2 (en) | Electric power steering apparatus | |
| US10532765B2 (en) | Control apparatus for three-phase rotary machine, and electric power steering apparatus | |
| US7928675B2 (en) | Feedback control method and apparatus for electric motor | |
| CN110199468B (zh) | 电动助力转向装置 | |
| US8710775B2 (en) | Electric power steering apparatus | |
| CN110651425A (zh) | 电动机控制装置以及搭载了该电动机控制装置的电动助力转向装置 | |
| CN109496190B (zh) | 电动助力转向装置 | |
| CN110612663A (zh) | 电动机控制装置以及搭载了该电动机控制装置的电动助力转向装置 | |
| US9660565B2 (en) | Controller for controlling a motor | |
| US12388382B2 (en) | Motor control device and electric power steering device provided with same | |
| EP3495235B1 (en) | Steering control unit | |
| JP5397664B2 (ja) | モータ制御装置 | |
| JP7600583B2 (ja) | モータ装置及びマップの設定方法 | |
| JP4816257B2 (ja) | モータ制御装置 | |
| JP2019050684A (ja) | パワーステアリング装置の制御装置 | |
| WO2024084639A1 (ja) | モータ制御装置、及び電動パワーステアリング装置 | |
| JP5842482B2 (ja) | モータ制御装置および電動パワーステアリング装置 | |
| JP2012066728A (ja) | 電動パワーステアリング装置 | |
| JP5595436B2 (ja) | モータ制御装置 | |
| CN114400931B (zh) | 主动限制同步马达驱动器中的再生电流下的扭矩能力优化 | |
| JP5028813B2 (ja) | 電動パワーステアリング装置及びその制御装置 | |
| JP2009081915A (ja) | モータ制御装置 | |
| JP2012235556A (ja) | モータ制御装置 | |
| US10577014B2 (en) | Steering control apparatus | |
| JP5495019B2 (ja) | モータ制御装置および車両用操舵装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22962747 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2024551140 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202280100618.8 Country of ref document: CN |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202527035027 Country of ref document: IN |
|
| WWP | Wipo information: published in national office |
Ref document number: 202280100618.8 Country of ref document: CN |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2022962747 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2022962747 Country of ref document: EP Effective date: 20250520 |
|
| WWP | Wipo information: published in national office |
Ref document number: 202527035027 Country of ref document: IN |
|
| WWP | Wipo information: published in national office |
Ref document number: 2022962747 Country of ref document: EP |