WO2023079838A1 - 発電素子、発電システムおよびエンコーダ - Google Patents
発電素子、発電システムおよびエンコーダ Download PDFInfo
- Publication number
- WO2023079838A1 WO2023079838A1 PCT/JP2022/034356 JP2022034356W WO2023079838A1 WO 2023079838 A1 WO2023079838 A1 WO 2023079838A1 JP 2022034356 W JP2022034356 W JP 2022034356W WO 2023079838 A1 WO2023079838 A1 WO 2023079838A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- power generation
- generation element
- magnetic
- magnetic field
- winding axis
- Prior art date
Links
- 238000010248 power generation Methods 0.000 title claims abstract description 207
- 229910000859 α-Fe Inorganic materials 0.000 claims abstract description 83
- 230000005330 Barkhausen effect Effects 0.000 claims abstract description 12
- 238000004804 winding Methods 0.000 claims description 67
- 239000000758 substrate Substances 0.000 description 23
- 230000000052 comparative effect Effects 0.000 description 14
- 238000010586 diagram Methods 0.000 description 13
- 230000005415 magnetization Effects 0.000 description 13
- 238000005259 measurement Methods 0.000 description 12
- 239000002131 composite material Substances 0.000 description 11
- 230000004907 flux Effects 0.000 description 7
- 230000000694 effects Effects 0.000 description 5
- 239000000470 constituent Substances 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 239000011347 resin Substances 0.000 description 3
- 229920005989 resin Polymers 0.000 description 3
- 239000004020 conductor Substances 0.000 description 2
- 230000014509 gene expression Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 239000011324 bead Substances 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 230000005389 magnetism Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000004806 packaging method and process Methods 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/245—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains using a variable number of pulses in a train
Definitions
- the present disclosure relates to power generation elements, power generation systems and encoders, and more particularly to power generation elements, power generation systems and encoders utilizing the large Barkhausen effect.
- a power generation element using the large Barkhausen effect as described above even when the strength of the external magnetic field applied to the power generation element changes, it is required that the power generation amount does not easily decrease and that the variation in the power generation amount is small. .
- the power generation element is used in an encoder, if the amount of power generation varies greatly, the accuracy of detecting the rotation of the motor, etc., is lowered.
- the present disclosure has been made to solve such problems, and an object thereof is to provide a power generation element whose power generation amount is less likely to vary, a power generation system including the power generation element, and an encoder including the power generation system.
- a power generation element includes a magnetic member that produces a large Barkhausen effect due to changes in an external magnetic field, a coil wound around the magnetic member, and a winding of the coil. a ferrite member arranged along the axis along the coil and provided with an opening into which a part of the magnetic member is inserted, wherein the end of the ferrite member corresponds to the end of the magnetic member. located further away from the coil along the winding axis than the winding axis.
- a power generation system includes the power generation element, and a magnetic field applying unit that applies a magnetic field to the power generation element and repeatedly reverses the direction of the magnetic field applied to the power generation element. , wherein the power generating element generates power by reversing the direction of the magnetic field by the magnetic field applying section.
- An encoder includes the power generation system, and the power generation element outputs power generated by reversing the direction of the magnetic field by the magnetic field application unit.
- FIG. 1A is a cross-sectional view showing a schematic configuration of an encoder according to an embodiment
- FIG. 1B is a cross-sectional view showing a schematic configuration of the motor device using the encoder according to the embodiment.
- FIG. 2 is a top view of magnets in the encoder according to the embodiment.
- FIG. 3 is a cross-sectional view showing a schematic configuration of the power generation element according to the embodiment.
- FIG. 4 is a plan view of a ferrite member of the power generation element according to the embodiment.
- 5 is a cross-sectional view showing a schematic configuration of a power generation element according to Comparative Example 1.
- FIG. 6 is a cross-sectional view showing a schematic configuration of a power generation element according to Comparative Example 2.
- FIG. FIG. 1A is a cross-sectional view showing a schematic configuration of an encoder according to an embodiment
- FIG. 1B is a cross-sectional view showing a schematic configuration of the motor device using the encoder according to the embodiment.
- FIG. 7 is a schematic diagram showing a circuit used for measuring the power generation amount of the power generation element.
- FIG. 8 is a diagram showing measurement results of the power generation amount of the power generation element according to Comparative Example 1.
- FIG. 9 is a diagram showing measurement results of the power generation amount of the power generation element according to the embodiment.
- FIG. 10 is a diagram showing measurement results of the power generation amount of the power generation element according to Comparative Example 2.
- FIG. 11 is a diagram showing an example of the positional relationship between the power generation element and magnets according to the embodiment.
- FIG. 12 is a diagram showing another example of the positional relationship between the power generation element and magnets according to the embodiment.
- FIG. 13 is a cross-sectional view showing a schematic configuration of a power generation element according to a modification of the embodiment.
- 14 is a plan view of a ferrite member of a power generation element according to a modification of the embodiment;
- each figure is a schematic diagram and is not necessarily strictly illustrated. Therefore, scales and the like are not always the same in each drawing. Also, in each figure, the same reference numerals are assigned to substantially the same components as those in other figures, and overlapping descriptions will be omitted or simplified.
- FIG. 1A is a cross-sectional view showing a schematic configuration of an encoder 1 according to this embodiment.
- FIG. 1B is a cross-sectional view showing a schematic configuration of a motor device using encoder 1 according to the present embodiment.
- FIG. 2 is a top view of magnet 10 in encoder 1 according to the present embodiment. Note that in FIG. 1A, the magnetic member 110 and the coil 130 housed in the housing 190 of the power generating element 100 are schematically indicated by dashed lines. For ease of viewing, FIG. 2 omits illustration of the magnet 10, the rotating shaft 30, and the power generating element 100 other than the magnetic member 110 and the coil 130. As shown in FIG.
- the encoder 1 shown in FIG. 1A is, for example, a rotary encoder used in combination with a motor such as a servomotor. Further, the encoder 1 is, for example, a power-generating absolute encoder. The encoder 1 detects the rotation angle, the amount of rotation, the number of rotations, etc. of a rotating shaft 30 such as a motor based on the electric signal generated by the power generation element 100 .
- the encoder 1 includes a power generation system 5 including a magnet 10 , a rotating plate 20 , a substrate 40 and power generation elements 100 , a control circuit 50 and a memory 60 . In the encoder 1, the power generation element 100 in the power generation system 5 generates power by a change in the magnetic field formed by the magnet 10 due to the rotation of the magnet 10, and outputs the generated power as an electric signal.
- the rotating plate 20 is a plate-like member that rotates together with a rotating shaft 30, which is a driving part such as a motor.
- a central portion of one main surface of the rotating plate 20 is attached to an end portion of the rotating shaft 30 in the axial direction of the rotating shaft 30 (the direction in which the rotating shaft 30 extends).
- the rotating plate 20 extends in a direction perpendicular to the axial direction of the rotating shaft 30 .
- the rotary plate 20 rotates about a rotation axis A that passes through the center of the rotation shaft 30 and extends along the axial direction of the rotation shaft 30 .
- the rotating motion of the rotary shaft 30 is synchronized with the rotating motion of the rotating device.
- the plan view shape of the rotating plate 20 is, for example, circular.
- the rotating plate 20 is made of metal, resin, glass, ceramic, or the like, for example.
- the rotating shaft 30 has a rod shape such as a cylindrical shape.
- the axis of the rotating shaft 30 and the rotation axis A are aligned.
- the magnet 10 is an example of a magnetic field applying section that applies an external magnetic field to the power generation element 100 .
- the magnet 10 repeatedly reverses the direction of the magnetic field applied to the power generation element 100 .
- the magnet 10 is, for example, a plate-shaped magnet.
- the magnet 10 faces the substrate 40 and is arranged on the main surface of the rotating plate 20 opposite to the rotating shaft 30 .
- a pair of magnets 10 are provided on the same main surface of rotating plate 20 .
- the thickness direction of the rotating plate 20 and the thickness direction of the magnet 10 are the same, and are along the axis of the rotating shaft 30 .
- the pair of magnets 10 rotate together with the rotating plate 20 about the rotating shaft 30 (that is, about the rotating axis A).
- the rotation of the rotating shaft 30 rotates the pair of magnets 10 , thereby changing the relative positional relationship between the pair of magnets 10 and the power generation element 100 , and the magnetic field from the pair of magnets 10 applied to the power generation element 100 . also change.
- the rotation directions of the pair of magnets 10 are, for example, both clockwise and counterclockwise, but may be either clockwise or counterclockwise.
- the pair of magnets 10 sandwich the rotation axis A of the rotation shaft 30 and are arranged side by side with a gap on the same main surface of the rotation plate 20 . That is, the rotation axis A of the rotation shaft 30 is positioned between the pair of magnets 10 to form a space. Also, the pair of magnets 10 are arranged symmetrically with the rotation axis A interposed therebetween. The pair of magnets 10 have the same shape.
- Each of the pair of magnets 10 is arranged along the rotation direction of the rotating shaft 30 .
- Each of the pair of magnets 10 has an arc shape along the rotation direction of the rotating shaft 30 when viewed from above. Note that only one of the pair of magnets 10 may be provided on the main surface of the rotating plate 20 .
- the magnet 10 may be a magnet having other shapes such as a doughnut-shaped, disk-shaped, or bar-shaped magnet as long as it can change the magnetic field applied to the power generating element 100 .
- the magnet 10 is, for example, a permanent magnet, but may be an electromagnet.
- the north and south poles of the pair of magnets 10 are aligned along the direction in which the pair of magnets 10 are aligned.
- the arrangement order of the S poles and the N poles of each of the pair of magnets 10 is the same. That is, each of the pair of magnets 10 is magnetized in the direction in which the pair of magnets 10 are arranged. Therefore, each of the pair of magnets 10 generates a magnetic field along the direction in which the pair of magnets 10 are arranged.
- the magnetic pole facing the rotation axis A in one magnet 10 is the S pole
- the magnetic pole facing the rotation axis A in the other magnet 10 is the N pole. Therefore, when the pair of magnets 10 are rotated by the rotation of the rotating shaft 30 and the positions of the pair of magnets 10 are switched, the directions of the magnetic fields formed by the pair of magnets 10 are reversed. As the pair of magnets 10 rotates, the magnetic field applied to the power generating element 100 changes. Specifically, the direction of the magnetic field applied to the power generation element 100 is repeatedly reversed by rotating the pair of magnets 10 .
- the substrate 40 is positioned to face the rotating plate 20 and the magnet 10 with a gap therebetween. That is, along the axial direction of the rotating shaft 30, the rotating shaft 30, the rotating plate 20, the magnets 10, and the substrate 40 are arranged in this order. Substrate 40 does not rotate with magnet 10 and rotating plate 20 .
- the substrate 40 has a plate shape whose thickness direction is the axial direction of the rotating shaft 30 .
- the plan view shape of the substrate 40 is, for example, circular. For example, when viewed from the axial direction of the rotating shaft 30, the respective centers of the rotating shaft 30, the rotating plate 20, and the substrate 40 are aligned with each other and are at the position of the rotation axis A. As shown in FIG.
- the substrate 40 is, for example, a wiring substrate on which electronic components such as the power generating element 100, the control circuit 50 and the memory 60 are mounted.
- the control circuit 50 and the memory 60 are mounted on the main surface of the substrate 40 facing the magnet 10
- the power generation element 100 is mounted on the main surface of the substrate 40 facing away from the magnet 10. It is
- the substrate 40 is fixed to, for example, a case 71 forming a part of the encoder 1, the motor 70, or the like.
- the power generation element 100 is located on the main surface of the substrate 40 facing away from the magnet 10 . Therefore, the substrate 40 side as viewed from the power generation element 100 is the magnet 10 side.
- the power generating element 100 is aligned with the magnet 10 and the rotating plate 20 along the axial direction of the rotating shaft 30 .
- the direction indicated by the arrow Z in which the magnet 10, the rotor plate 20, and the power generation element 100 are aligned may be referred to as the "alignment direction.”
- the alignment direction is also the axial direction of rotating shaft 30 and the normal direction of main surface 11 of magnet 10 .
- the power generation element 100 does not rotate together with the magnet 10 and the rotating plate 20 .
- the power generating element 100 is provided so as to face the rotating plate 20 in the axial direction of the rotating shaft 30 .
- the power generation element 100 is arranged at a position that does not overlap the rotation axis A and is offset from the rotation axis A when viewed from the axial direction of the rotation shaft 30 .
- the power generating element 100 overlaps a position through which the magnet 10 passes when it rotates when viewed from the axial direction of the rotating shaft 30 .
- the power generation element 100 extends along the main surface of the substrate 40 so as to extend in the tangential direction of the rotation direction of the magnet 10 .
- the power generating element 100 generates power by changing the magnetic field formed by the magnet 10 due to the rotation of the magnet 10, specifically by reversing the direction of the magnetic field, and outputs the generated power.
- the winding axis direction of the coil 130 of the power generation element 100 (longitudinal direction of the magnetic member 110) is the direction in which the power generation element 100 extends.
- the winding axis direction of the coil 130 is the direction indicated by the arrow X in the drawing. Henceforth, the winding axial direction of the coil 130 shown by the arrow X in a figure may only be called "winding axial direction.”
- the power generation element 100 includes, for example, a magnetic member 110, a coil 130, a ferrite member 150 (see FIG. 3; not shown in FIGS. 1A and 2), terminals 181 and 182, and a housing 190.
- the magnetic member 110 is a magnetic member that produces a large Barkhausen effect, and a power generation pulse is generated in a coil 130 wound around the magnetic member 110 .
- the arrangement of the power generation element 100 is not particularly limited, and the power generation element 100 is positioned in a region to which the magnetic field generated by the magnet 10 is applied, and the reversal of the direction of the magnetic field caused by the rotation of the rotating shaft 30 generates a power generation pulse. should be arranged so as to generate
- the terminals 181 and 182 are members for electrically connecting the power generation element 100 and the substrate 40 .
- the terminals 181 and 182 are located near the end facing the substrate 40 in the power generating element 100 .
- the magnet 10 is arranged in the direction of the terminals 181 and 182 when viewed from the power generation element 100 .
- the terminal 181 is electrically connected to one end of the conductor wire forming the coil 130, and the terminal 182 is electrically connected to the other end of the conductor wire. That is, coil 130 and substrate 40 are electrically connected via terminals 181 and 182 .
- the housing 190 accommodates and supports the magnetic member 110, the coil 130 and the ferrite member 150. Magnetic member 110 , coil 130 and ferrite member 150 are embedded in resin or the like in housing 190 , for example. Further, the housing 190 accommodates some of the terminals 181 and 182 .
- the housing 190 is open on the magnet 10 side of the power generating element 100, for example.
- the housing 190 is fixed to the substrate 40 by, for example, a fixing member (not shown) or the like.
- the control circuit 50 is located on the main surface of the substrate 40 facing the magnet 10 .
- the control circuit 50 is electrically connected to the power generation element 100 .
- the control circuit 50 acquires electrical signals such as power generation pulses generated by the power generation element 100, and detects (calculates) the rotation angle, rotation amount, rotation speed, etc. of the rotating shaft 30 such as a motor based on the acquired electrical signals. do.
- the control circuit 50 is, for example, an IC (integrated circuit) package or the like.
- the memory 60 is located on the main surface of the substrate 40 facing the magnet 10 .
- the memory 60 is connected with the control circuit 50 .
- the memory 60 is a nonvolatile memory such as a semiconductor memory that stores the results detected by the control circuit 50 .
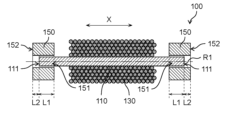
- FIG. 3 is a cross-sectional view showing a schematic configuration of the power generating element 100 according to this embodiment.
- FIG. 3 shows a cross section cut along the alignment direction so as to pass through the winding axis R1 of the coil 130.
- the terminals 181, 182 and housing 190 are omitted in FIG. These are the same in the drawings of each power generating element described below.
- the power generation element 100 includes a magnetic member 110, a coil 130, and a ferrite member 150.
- the magnetic member 110 is a magnetic member that produces a large Barkhausen effect due to changes in the external magnetic field formed by the magnet 10 and the like.
- the magnetic member 110 is, for example, a composite magnetic wire, such as a Wiegand wire, which has different magnetic properties between the central portion and the outer peripheral portion in the radial direction (the direction perpendicular to the winding axis R1).
- a composite magnetic wire such as a Wiegand wire
- one of the central portion and the outer peripheral portion is a hard magnetic portion, and the other is a soft magnetic portion.
- Composite magnetic wires have magnetic properties such that the direction of magnetization changes in the soft magnetic portion when a relatively small external magnetic field is applied, while the direction of magnetization does not change in the hard magnetic portion unless a relatively large external magnetic field is applied. have.
- a relatively large external magnetic field sufficient to reverse the magnetization direction of the hard magnetic portion of the composite magnetic wire is applied in the longitudinal direction of the composite magnetic wire, the magnetization direction of the hard magnetic portion and the soft magnetic portion of the composite magnetic wire are aligned in the same direction as the magnetization direction of After that, even if the direction of the external magnetic field applied to the composite magnetic wire is reversed, the magnetization direction of the hard magnetic part and the magnetization direction of the soft magnetic part are reversed while the external magnetic field is small due to the influence of the hard magnetic part.
- the magnetic member 110 is not limited to a composite magnetic wire such as a Wiegand wire, and may be any magnetic member that produces a large Barkhausen effect by having a hard magnetic portion and a soft magnetic portion with different magnetic properties.
- the hard magnetic portion and the soft magnetic portion are arranged in a direction intersecting (for example, perpendicular to) the winding axis direction, and the hard magnetic portion and the soft magnetic portion exist so as to extend in the winding axis direction. This gives rise to the large Barkhausen effect.
- the magnetic member 110 may be a magnetic member having a structure in which thin films having different magnetic properties are laminated.
- the magnetic member 110 is, for example, a wire-shaped member extending along the winding axis of the coil 130 .
- the cross-sectional shape of the magnetic member 110 cut in the radial direction is, for example, circular or elliptical, but may be other shapes such as rectangular or polygonal.
- the length of the magnetic member 110 is longer than the length of the coil 130 in the winding axis direction.
- the coil 130 is a coil in which a conductive wire forming the coil 130 is wound around the magnetic member 110 .
- the coil 130 is wound along a winding axis R ⁇ b>1 passing through the center of the magnetic member 110 and extending in the longitudinal direction of the magnetic member 110 .
- the coil 130 is located between the two end surfaces 111 on both sides of the magnetic member 110 .
- the coil 130 is located between the two ferrite members 150 .
- Coil 130 and ferrite member 150 are spaced apart. Note that the coil 130 may be in contact with the ferrite member 150 by increasing the number of turns and extending in the winding axis direction.
- the ferrite member 150 is provided at the end of the magnetic member 110 so as to be aligned with the coil 130 along the winding axis of the coil 130 .
- two ferrite members 150 are provided on each end of the magnetic member 110 .
- the two ferrite members 150 face each other across the coil 130 and have symmetrical shapes. Although one of the two ferrite members 150 will be mainly described below, the same description applies to the other.
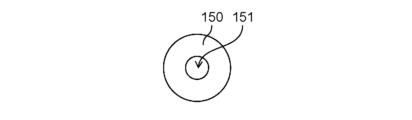
- FIG. 4 is a plan view of the ferrite member 150.
- FIG. FIG. 4 shows a plan view shape of the ferrite member 150 viewed from the outside along the winding axis direction.
- the ferrite member 150 is a cylindrical member having an opening 151 formed therein.
- the ferrite member 150 is, for example, a ferrite bead made of a soft magnetic material.
- the ferrite member 150 is provided to collect the magnetic flux from the magnet 10, stabilize the magnetic flux in the magnetic member 110, and the like.
- the ferrite member 150 is, for example, softer magnetic than the soft magnetic portion in the magnetic member 110 , that is, has a lower coercive force than the soft magnetic portion in the magnetic member 110 .
- the ferrite member 150 is provided with an opening 151 into which a part of the magnetic member 110 is inserted.
- the opening 151 is a through hole penetrating the ferrite member 150 along the winding axis direction. Also, the opening 151 is positioned at the center of the ferrite member 150 when viewed along the winding axis direction.
- the shape of each of the outer periphery of the ferrite member 150 and the opening 151 when viewed along the winding axis direction is circular, for example. Therefore, the ferrite member 150 is cylindrical, for example.
- the end of the magnetic member 110 in the winding axis direction is positioned inside the opening 151 and covered with the ferrite member 150 . Therefore, the outer end face 152 of the ferrite member 150 is located outside the end face 111 of the magnetic member 110 in the winding axis direction. That is, the end surface 152 is located on the opposite side of the coil 130 when viewed from the end surface 111 in the winding axis direction.
- "outside" in the direction of the winding axis means "a position farther away" from the center of the magnetic member 110 in the direction of the winding axis.
- the length L1 of the region of the ferrite member 150 located inside the end face 112 is longer than the length L2 of the region of the ferrite member 150 located outside the end face 112 .
- the area where the ferrite member 150 covers the magnetic member 110 is increased, and the power generation amount of the power generation element 100 can be stabilized.
- “inside” in the direction of the winding axis means "a position closer to the center" of the magnetic member 110 in the direction of the winding axis.
- FIG. 5 is a cross-sectional view showing a schematic configuration of a power generation element 100x according to Comparative Example 1.
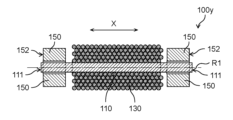
- FIG. 6 is a cross-sectional view showing a schematic configuration of a power generation element 100y according to Comparative Example 2. As shown in FIG.
- the power generation element 100x according to Comparative Example 1 includes a ferrite member 150x instead of the ferrite member 150.
- the ferrite member 150x is shorter than the ferrite member 150 in the winding axis direction.
- the position of the outer end surface 152x of the ferrite member 150x in the winding axis direction is inside the position of the outer end surface of the ferrite member 150 in the winding axis direction. Therefore, the end face 152x is positioned inside the end face 111 of the magnetic member 110 in the winding axis direction. That is, the end portion of the magnetic member 110 outside the end face 152x in the winding axis direction is not covered with the ferrite member 150x.
- the ferrite member 150 is located inside the power generation element 100 in the winding axis direction.
- the end surface 152 of the ferrite member 150 is positioned inside the end surface 111 of the magnetic member 110 in the winding axis direction. Therefore, in the power generation element 100y, the end portion outside the end surface 152 of the magnetic member 110 in the winding axis direction is not covered with the ferrite member 150. As shown in FIG. 6, in the power generation element 100y according to Comparative Example 2, the ferrite member 150 is located inside the power generation element 100 in the winding axis direction. In the power generation element 100y, the end surface 152 of the ferrite member 150 is positioned inside the end surface 111 of the magnetic member 110 in the winding axis direction. Therefore, in the power generation element 100y, the end portion outside the end surface 152 of the magnetic member 110 in the winding axis direction is not covered with the ferrite member 150. As shown in FIG.
- FIG. 7 is a schematic diagram showing a circuit used for measuring the power generation amount of the power generation element.
- the power generation element and the magnet 10 are arranged so as to have the positional relationship shown in FIGS. changed repeatedly.
- the power generation element was connected to the circuit as shown in FIG. Specifically, the output of the power generation element was connected to a full-wave rectifier circuit connected to a capacitor C and a resistor R. Each time the direction of the external magnetic field was reversed, the peak of the rectified voltage V of the pulse generated by the power generation element was measured, and the power generation amount was set to (1/2) CV2 .
- the power generation amount was measured 2,500 times, and the average value and minimum value of the 2,500 power generation amounts measured were derived.
- the distance between the magnet 10 and the magnetic member 110 is -1.2 mm, -0.4 mm, +0.6 mm, +1.2 mm, +1.6 mm with respect to the reference distance assumed for stable power generation. , +2.1 mm and +2.6 mm.
- the measurement was not performed under the distance conditions of +2.1 mm and +2.6 mm. The measurement results are shown in FIGS. 8 to 10.
- FIG. 8 to 10 The measurement results are shown in FIGS. 8 to 10.
- FIG. 8 is a diagram showing the measurement results of the power generation amount of the power generation element 100x according to Comparative Example 1.
- FIG. FIG. 9 is a diagram showing measurement results of the power generation amount of the power generation element 100 according to the embodiment.
- FIG. 10 is a diagram showing the measurement results of the power generation amount of the power generation element 100y according to Comparative Example 2.
- the horizontal axis indicates the difference in distance between the magnet 10 and the magnetic member 110 with respect to the reference distance. The distance between the magnet 10 and the magnetic member 110 is longer toward the right side of the horizontal axis.
- the vertical axis indicates the power generation amount measured by the method described above.
- a reference value P1 (a two-dot chain line in FIGS. 8 to 10) was set as a reference value for the amount of power generation that enables stable detection of electrical signals.
- the power generation amount is greater than that of the power generation element 100x under the distance conditions of +1.2 mm and +1.6 mm. .
- the reason why the power generation element 100 has a wider range of applied magnetic field intensity than the power generation element 100x is considered as follows.
- a ferrite member is easier to collect magnetism than the magnetic member 110 . Therefore, the magnetic flux from the magnet 10 is more likely to gather on the ferrite member than on the magnetic member 110 . As a result, the magnetic member 110 is mainly magnetized by the magnetic field through the ferrite member.
- the end surface 111 of the magnetic member 110 is located outside the end surface 152x of the ferrite member 150x in the winding axis direction. Therefore, in the winding axis direction, the end portion of the magnetic member 110 outside the end surface 152x is difficult to magnetize, or the magnetic member 110 may and the ferrite member 150x are magnetized in the opposite direction. Therefore, the magnetic flux density of the entire magnetized magnetic member 110 is less likely to increase. As a result, when the external magnetic field applied to the power generation element 100 weakened, it is considered that the amount of power generation decreased significantly.
- the end surface 111 of the magnetic member 110 is located inside the end surface 152 of the ferrite member 150 in the winding axis direction and is covered with the ferrite member 150 . Therefore, even the ends of the magnetic member 110 are magnetized, and the magnetic flux density of the entire magnetized magnetic member 110 increases. As a result, even when the external magnetic field applied to the power generation element 100 is weakened, the amount of power generation is less likely to decrease.
- the power generation element 100y when the power generation element 100y according to Comparative Example 2 using the same ferrite member 150 as the power generation element 100 is used for power generation, the power generation element The amount of power generated was lower than 100.
- the end surface 111 of the magnetic member 110 is positioned outside the end surface 152 of the ferrite member 150 in the winding axis direction, thereby reducing the amount of power generation.
- the power generation amount of the power generation element 100y is lower than that of the power generation element 100. From this, it can be said that the difference in the amount of power generation between the power generating element 100x and the power generating element 100 according to Comparative Example 1 is not due to the difference in length in the winding axis direction between the ferrite member 150x and the ferrite member 150. That is, in the power generating element 100, the end surface 111 of the magnetic member 110 is located inside the end surface 152 of the ferrite member 150 in the winding axis direction, so that the amount of power generated is less likely to decrease and the strength of the external magnetic field changes.
- the power generation element 100 is unlikely to reduce the power generation amount, and can stably output the generated power as an electrical signal.
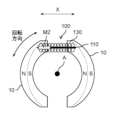
- 11 and 12 are diagrams showing examples of the positional relationship between the power generation element 100 and the magnet.
- 11 and 12 show diagrams of the power generation element 100 and the magnets arranged along the rotation axis A as seen from the direction along the rotation axis A, as in the encoder 1 described above. ing. 11 and 12, illustration of the magnet and the power generating element 100 other than the magnetic member 110 and the coil 130 is omitted for the sake of clarity.
- FIG. 11 shows the case where the rod-shaped magnet 10A rotates about the rotation axis A as the rotation axis.
- the magnet 10A and the power generation element 100 are arranged so as to overlap each other when viewed along the rotation axis A.
- the rotation axis A which is the rotation axis of the magnet 10A, the center of the magnet 10A, and the center M1 of the power generation element 100 are at the same position.
- the S pole and the N pole of the magnet 10A are arranged symmetrically with the rotation axis A interposed therebetween. In the case of the example shown in FIG.
- the position where the strongest magnetic field from the magnet 10A is applied in the power generation element 100 is the center M1 of the power generation element 100.
- the S pole and the N pole of the magnet 10A move on the circumference around the rotation axis A while maintaining a symmetrical positional relationship with the rotation axis A interposed therebetween.
- the position where the strongest magnetic field from the magnet 10A is applied does not move. That is, the magnetic field applied from the magnet 10A is always the strongest at the center M1 of the power generating element 100.
- the direction of the magnetic field applied from the magnet 10A is reversed at the center M1 of the power generating element 100 earlier than at the ends of the power generating element 100.
- the power generation of the power generation element 100 is greatly influenced by the magnetization of the central portion of the magnetic member 110, and by the magnetization of the ends of the magnetic member 110. becomes smaller. Therefore, the effect of magnetizing up to the ends of the magnetic member 110 to improve the power generation amount of the power generation element 100 described in the measurement result of the power generation amount described above can be achieved even in the positional relationship between the magnet 10A and the power generation element 100 shown in FIG. Although it appears, it may be small.
- FIG. 12 shows an example that is the same as the positional relationship between the power generation element 100 and the pair of magnets 10 in the encoder 1 (power generation system 5) described above. That is, when viewed along the rotation axis A, the pair of magnets 10 and the power generation element 100 are arranged away from the rotation axis A, which is the center of rotation. In the example shown in FIG. 12 , when the pair of magnets 10 rotate, the pair of arc-shaped magnets 10 move along the longitudinal direction of the power generation element 100 when viewed along the rotation axis A.
- the position of the power generating element 100 where the magnetic field from the pair of magnets 10 is most strongly applied is from one end of the power generating element 100 as indicated by the white arrow M2 when the pair of magnets 10 rotates. Move toward the center, then move from the center toward the other end. Therefore, when the pair of magnets 10 rotates, the position where the direction of the magnetic field applied from the pair of magnets 10 is reversed also moves from one end of the power generation element 100 toward the center as indicated by the white arrow M2. and then move from the center toward the other end.
- the magnetization of the ends of the magnetic members 110 has a greater effect on the power generation of the power generation element 100 than in the example shown in FIG. Therefore, the effect of increasing the power generation amount of the power generation element 100 by magnetizing even the ends of the magnetic member 110 described in the measurement results of the power generation amount described above is remarkably exhibited. That is, the pair of rotating magnets 10 as shown in FIGS. 1A and 2 moves the position at which the direction of the magnetic field to be applied is reversed from the ends of the power generating element 100 in the direction of the winding axis toward the center. In the power generation system 5, the power generation amount is particularly difficult to vary.
- FIG. 13 is a cross-sectional view showing a schematic configuration of a power generating element 200 according to this modified example.
- the power generation element 200 is used, for example, in place of the power generation element 100 of the encoder 1 described above.
- the power generation element 200 differs from the power generation element 100 in that it includes a ferrite member 250 instead of the ferrite member 150 .
- FIG. 14 is a plan view of the ferrite member 250.
- FIG. FIG. 14 shows a plan view shape of the ferrite member 250 viewed from the outside along the winding axis direction.
- the ferrite member 250 includes a body portion 255 and a protrusion 256 that is thinner than the body portion 255 and extends outward from the body portion 255 along the winding axis direction. have.
- the main body portion 255 and the projection portion 256 are names given to two parts formed by processing one member made of the same material, for example.
- the ferrite member 250 may be formed by connecting a main body portion 255 and a projection portion 256 which are made of different members.
- the ferrite member 250 is provided with an opening 251 that penetrates the main body 255 and the protrusion 256 along the winding axis direction.
- the opening 251 opens on the coil 130 side of the main body 255 .
- the opening 251 is positioned at the center of the main body 255 and the protrusion 256 when viewed along the winding axis direction. Note that the opening 251 may be provided at least in the body portion 255 of the ferrite member 250 and may not be provided in the projecting portion 256 .
- the end of the magnetic member 110 in the winding axis direction is positioned inside the opening 251 and covered with the ferrite member 250 . Therefore, the outer end surface 252 of the ferrite member 250 is located outside the end surface 111 of the magnetic member 110 in the winding axis direction. In ferrite member 250 , end surface 252 is provided on protrusion 256 .
- the shape of the outer circumference of the main body 255, the outer circumference of the protrusion 256, and the opening 251 when viewed along the winding axis is, for example, circular. Therefore, the shape of each of main body portion 255 and projection portion 256 is cylindrical.
- the outer diameter of the protruding portion 256 is smaller than the outer diameter of the main body portion 255 .
- the length of the main body portion 255 is longer than the length of the projection portion 256 in the winding axis direction, for example.
- the main body portion 255 which is thicker than the protruding portion 256, becomes larger, and the magnetism-collecting force of the ferrite member 250 can be enhanced.
- the body part 255 is located entirely inside the end face 111 of the magnetic member 110 in, for example, the winding axis direction. A portion of the body portion 255 may be located outside the end face 111 of the magnetic member 110 in the winding axis direction.
- the projecting portion 256 protrudes from the end portion of the cylindrical body portion 255 outward in the winding axial direction to form a step.
- a side surface of the protrusion 256 extends in a direction parallel to the winding axis direction.
- the side surface of the protrusion 256 may be tapered with respect to the winding axis direction. That is, the projecting portion 256 may have a shape in which the distal end side is tapered.
- the ferrite member 250 has a thin protrusion 256 that protrudes outward in the winding axis direction.
- This allows, for example, protrusions 256 to penetrate into the resin that embeds magnetic member 110, coil 130 and ferrite member 250, or, if housing 190 is provided with recesses or holes, recesses.
- the protrusion 256 can be fitted into the hole. Therefore, the composite of the magnetic member 110, the coil 130, and the ferrite member 250 can be easily supported and fixed to the housing 190, and the packaging property of the power generation element 200 can be improved.
- the opening of the ferrite member is a through hole, but it is not limited to this.
- the opening of the ferrite member may be a bottomed hole that is open only on the inner side in the direction of the winding axis. That is, part of the ferrite member may also be arranged outside the end surface of the magnetic member.
- the position of the power generating element is fixed, and the magnet rotates as the rotating shaft rotates, so that the direction of the magnetic field applied to the power generating element is repeatedly reversed, but the present invention is not limited to this.
- the direction of the magnetic field applied to the power generation element may be repeatedly reversed by fixing the position of the magnet and rotating the power generation element with the rotation of the rotating shaft.
- a rotary encoder used in combination with a motor has been described as an example, but the present invention is not limited to this.
- the technology of the present disclosure can also be applied to linear encoders.
- the power generation element, power generation system, and encoder according to the present disclosure are useful for rotating or linearly moving equipment and devices such as motors.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
Abstract
発電量がばらつきにくい発電素子等を提供する。発電素子(100)は、外部磁界の変化によって大バルクハウゼン効果を生じる磁性部材(110)と、磁性部材(110)に巻回されたコイル(130)と、コイル(130)の巻回軸方向に沿ってコイル(130)と並ぶように配置され、磁性部材(110)の一部が挿入されている開口部(151)が設けられたフェライト部材(150)と、を備える。巻回軸方向において、フェライト部材(150)の端面(152)は、磁性部材(110)の端面(111)よりも外側に位置する。
Description
本開示は、発電素子、発電システムおよびエンコーダに関し、特に大バルクハウゼン効果を利用した発電素子、発電システムおよびエンコーダに関する。
従来、モータの回転等を検出するためのエンコーダにおいて、バッテリを用いずに回転を検出するために、大バルクハウゼン効果を利用した発電素子が用いられたエンコーダが知られている(例えば、特許文献1)。このような発電素子は、例えば、大バルクハウゼン効果を生じる磁性部材にコイルが巻回された構成を有する。大バルクハウゼン効果を生じる磁性部材は、外部磁界の変化によって磁束密度が急激に変化するため、磁束密度の急激な変化により磁性部材に巻回されたコイルに電力が生じる。エンコーダは、このような電力による電気信号を用いて、モータの回転等を検出する。
上述のような大バルクハウゼン効果を利用した発電素子においては、発電素子に印加される外部磁界の強さが変化した場合でも、発電量が低下しにくく、発電量のばらつきが小さいことが求められる。例えば、発電素子をエンコーダに用いる際に、発電量のばらつきが大きい場合には、モータの回転等を検出する精度が低下する。
本開示は、このような問題を解決するためになされたものであり、発電量がばらつきにくい発電素子、その発電素子を備えた発電システム、およびその発電システムを備えたエンコーダを提供することを目的とする。
上記目的を達成するために、本開示の一態様に係る発電素子は、外部磁界の変化によって大バルクハウゼン効果を生じる磁性部材と、前記磁性部材に巻回されたコイルと、前記コイルの巻回軸に沿って前記コイルと並んで配置され、前記磁性部材の一部が挿入されている開口部が設けられたフェライト部材と、を備え、前記フェライト部材の端部は、前記磁性部材の端部よりも前記巻回軸に沿って前記コイルから離れた位置に位置する。
また、本開示の他の一態様に係る発電システムは、上記発電素子と、前記発電素子に磁界を印加し、かつ、前記発電素子に印加される前記磁界の向きを繰り返し反転させる磁界印加部と、を備え、前記発電素子は、前記磁界印加部による前記磁界の向きの反転により発電する。
また、本開示の他の一態様に係るエンコーダは、上記発電システムを備え、前記発電素子は、前記磁界印加部による前記磁界の向きの反転により発電した電力を出力する。
本開示によれば、発電量がばらつきにくい発電素子、発電システムおよびエンコーダを提供できる。
以下、本開示の実施の形態について、図面を参照しながら説明する。なお、以下に説明する実施の形態は、いずれも本開示の一具体例を示すものである。したがって、以下の実施の形態で示される、数値、形状、材料、構成要素、構成要素の配置位置および接続形態等は、一例であって本開示を限定する主旨ではない。よって、以下の実施の形態における構成要素のうち、本開示の独立請求項に記載されていない構成要素については、任意の構成要素として説明される。
なお、各図は、模式図であり、必ずしも厳密に図示されたものではない。したがって、各図において縮尺などは必ずしも一致していない。また、各図において、他の図と実質的に同一の構成に対しては同一の符号を付しており、重複する説明は省略または簡略化する。
また、本明細書において、平行などの要素間の関係性を示す用語、および、矩形などの要素の形状を示す用語、ならびに、数値範囲は、厳格な意味のみを表す表現ではなく、実質的に同等な範囲、例えば数%程度の差異をも含むことを意味する表現である。
(実施の形態)
以下、実施の形態に係るエンコーダ1、発電システム5および発電素子100について説明する。
以下、実施の形態に係るエンコーダ1、発電システム5および発電素子100について説明する。
[構成]
まず、本実施の形態に係るエンコーダ1、発電システム5および発電素子100の構成を説明する。
まず、本実施の形態に係るエンコーダ1、発電システム5および発電素子100の構成を説明する。
図1Aは、本実施の形態に係るエンコーダ1の概略構成を示す断面図である。図1Bは、本実施の形態に係るエンコーダ1を用いたモータ装置の概略構成を示す断面図である。図2は、本実施の形態に係るエンコーダ1における磁石10の上面図である。なお、図1Aにおいて、発電素子100の筐体190に収容されている磁性部材110およびコイル130が破線で模式的に示されている。また、見やすさのため、図2においては、磁石10、回転軸30ならびに発電素子100における磁性部材110およびコイル130以外の図示は省略されている。
図1Aに示されるエンコーダ1は、例えば、サーボモータ等のモータと組み合わせて用いられるロータリーエンコーダである。また、エンコーダ1は、例えば、発電方式のアブソリュートエンコーダである。エンコーダ1は、発電素子100が生成する電気信号に基づいて、例えばモータ等の回転軸30の回転角、回転量および回転数等を検出する。エンコーダ1は、磁石10、回転板20、基板40および発電素子100を備える発電システム5と、制御回路50と、メモリ60と、を備える。エンコーダ1では、発電システム5における発電素子100が、磁石10が回転することによる、磁石10によって形成される磁界の変化によって発電し、発電した電力を電気信号として出力する。
回転板20は、モータ等の駆動部である回転軸30とともに回転する板状の部材である。回転板20の一方の主面の中央部は、回転軸30の軸方向(回転軸30が延びる方向)における回転軸30の端部に取り付けられている。回転板20は、回転軸30の軸方向と直交する方向に延びる。回転板20は、回転軸30の中心を通り回転軸30の軸方向に沿って延びる回転軸線Aを回転軸として回転する。回転軸30の回転動作は、回転する機器の回転動作に同期している。回転板20の平面視形状は、例えば、円形である。回転板20は、例えば、金属製、樹脂製、ガラス製またはセラミック製等である。
回転軸30は、円柱状等の棒状である。回転軸30の軸心と回転軸線Aとは、一致している。
磁石10は、発電素子100に対して外部磁界を印加する磁界印加部の一例である。磁石10は、発電素子100に印加される磁界の向きを繰り返し反転させる。磁石10は、例えば、板状の磁石である。磁石10は、基板40と対向し、回転板20の主面であって回転軸30とは反対に位置する主面上に配置される。本実施の形態においては、一対の磁石10が回転板20の同一主面上に設けられている。回転板20の厚み方向および磁石10の厚み方向は同じであり、回転軸30の軸に沿う方向である。一対の磁石10は、回転板20と共に回転軸30を回転中心として(つまり、回転軸線Aを回転軸として)回転する。回転軸30の回転により、一対の磁石10が回転することで、一対の磁石10と発電素子100との相対的な位置関係が変化し、発電素子100に印加される一対の磁石10からの磁界も変化する。一対の磁石10の回転方向は、例えば、時計回りおよび反時計回りの両方であるが、時計回りおよび反時計回りのいずれか一方のみであってもよい。
一対の磁石10は、回転軸30の回転軸線Aを挟み、かつ、回転板20の同一主面上で間隔を空けて並んで配置されている。つまり、一対の磁石10の間には、回転軸30の回転軸線Aが位置し、空間が形成されている。また、一対の磁石10は、回転軸線Aを挟んで対称に配置されている。一対の磁石10は、相互に同形状である。
一対の磁石10の各々は、回転軸30の回転方向に沿って配置されている。一対の磁石10の各々の平面視形状は、回転軸30の回転方向に沿う円弧状である。なお、一対の磁石10のうちの一方のみが回転板20の主面上に設けられていてもよい。また、磁石10は、発電素子100に印加する磁界を変化させることができれば、ドーナツ状、円盤状または棒状の磁石等、他の形状の磁石であってもよい。また、磁石10は、例えば、永久磁石であるが、電磁石であってもよい。
図2に示すように、一対の磁石10の各々のN極およびS極は、一対の磁石10が並ぶ方向に沿って並んでいる。一対の磁石10の各々のS極とN極との並び順は同じである。つまり、一対の磁石10の各々は、一対の磁石10が並ぶ方向に着磁されている。そのため、一対の磁石10の各々は、一対の磁石10が並ぶ方向に沿った磁界を発生させる。
一対の磁石10のうち、一方の磁石10において回転軸線Aに対向する磁極はS極であり、他方の磁石10において回転軸線Aに対向する磁極はN極である。そのため、回転軸30の回転によって、一対の磁石10が回転して、一対の磁石10の位置が互いに入れ替わると、一対の磁石10が形成する磁界の向きは反転する。このような一対の磁石10が回転することにより、発電素子100に印加される磁界が変化する。具体的には、一対の磁石10が回転することにより、発電素子100に印加される磁界の向きが繰り返し反転する。
図1Aに示すように、基板40は、回転板20および磁石10と間隔を空けて対向するように位置する。つまり、回転軸30の軸方向に沿って、回転軸30、回転板20、磁石10および基板40は、この順で並ぶ。基板40は、磁石10および回転板20とともに回転しない。基板40は、回転軸30の軸方向を厚み方向とする板状である。基板40の平面視形状は、例えば、円形状である。例えば、回転軸30の軸方向から見た場合に、回転軸30、回転板20および基板40それぞれの中心は一致し、回転軸線Aの位置である。
基板40は、例えば、配線基板であり、発電素子100、制御回路50およびメモリ60等の電子部品等が実装される。図1Aに示される例では、基板40の磁石10に面する主面に制御回路50およびメモリ60が実装されており、基板40の磁石10とは反対に面する主面に発電素子100が実装されている。基板40は、例えば、エンコーダ1またはモータ70等の一部を構成するケース71に固定される。
発電素子100は、基板40の磁石10とは反対に面する主面上に位置する。そのため、発電素子100からみて基板40側が、磁石10側である。発電素子100は、回転軸30の軸方向に沿って、磁石10および回転板20と並んでいる。以降、磁石10および回転板20と発電素子100とが並ぶ、矢印Zで示される方向を「並び方向」と称する場合がある。本実施の形態においては、並び方向は、回転軸30の軸方向および磁石10の主面11の法線方向でもある。発電素子100は、磁石10および回転板20と共に回転しない。
発電素子100は、回転軸30の軸方向において回転板20と対向するように設けられている。発電素子100は、回転軸30の軸方向から見た場合に、回転軸線Aと重ならず、回転軸線Aとずれた位置に配置されている。発電素子100は、回転軸30の軸方向から見た場合に、磁石10が回転した際に通る位置と重なる。また、発電素子100は、磁石10の回転方向の接線方向に延びるように、基板40の主面に沿って延在する。
発電素子100は、磁石10が回転することによる、磁石10によって形成される磁界の変化、具体的には磁界の向きの反転によって発電し、発電した電力を出力する。発電素子100のコイル130の巻回軸方向(磁性部材110の長手方向)が、発電素子100が延在する方向である。コイル130の巻回軸方向は、図中の矢印Xで示される方向である。以降、図中の矢印Xで示されるコイル130の巻回軸方向を、単に「巻回軸方向」と称する場合がある。
発電素子100は、例えば、磁性部材110と、コイル130と、フェライト部材150(図3参照;図1Aおよび図2では図示省略)と、端子181、182と、筐体190とを備える。
磁性部材110、コイル130およびフェライト部材150の詳細については後述する。磁性部材110は大バルクハウゼン効果を生じる磁性部材であり、磁性部材110に巻回されたコイル130に発電パルスが生じる。なお、発電素子100の配置は、特に制限されず、発電素子100は、磁石10によって発生する磁界が印加される領域に位置し、回転軸30が回転することによる磁界の向きの反転によって発電パルスを生成するように配置されればよい。
端子181、182は、発電素子100と基板40とを電気的に接続するための部材である。端子181、182は、発電素子100において基板40に面する端部近傍に位置する。発電素子100からみて端子181、182の方向に、磁石10が配置されている。端子181は、コイル130を構成する導線の一端に電気的に接続され、端子182は当該導線の他端に電気的に接続される。つまり、コイル130と基板40とは、端子181、182を介して電気的に接続されている。
筐体190は、磁性部材110、コイル130およびフェライト部材150を収容し、これらを支持している。磁性部材110、コイル130およびフェライト部材150は、例えば、筐体190内で樹脂等に包埋されている。また、筐体190は、端子181、182の一部を収容する。筐体190は、例えば、発電素子100における磁石10側に開口している。筐体190は、例えば、図示の省略されている固定部材等によって、基板40に固定されている。
制御回路50は、基板40の磁石10に面する主面上に位置する。制御回路50は、発電素子100と電気的に接続されている。制御回路50は、発電素子100が生成する発電パルス等の電気信号を取得し、取得した電気信号に基づいて、モータ等の回転軸30の回転角、回転量および回転数等を検出(算出)する。制御回路50は、例えば、IC(集積回路)パッケージ等である。
メモリ60は、基板40の磁石10に面する主面上に位置する。メモリ60は、制御回路50と接続されている。メモリ60は、制御回路50が検出した結果を保存する半導体メモリ等の不揮発メモリである。
次に、本実施の形態に係る発電素子100の詳細構成について説明する。
図3は、本実施の形態に係る発電素子100の概略構成を示す断面図である。図3は、コイル130の巻回軸R1を通るように、並び方向に沿って切断した場合の断面を示している。なお、見やすさのため、図3において、端子181、端子182および筐体190の図示は省略されている。これらは、以下で説明する各発電素子の図においても同様である。
図3に示されるように、発電素子100は、磁性部材110と、コイル130と、フェライト部材150とを備える。
磁性部材110は、磁石10等が形成する外部磁界の変化によって大バルクハウゼン効果を生じる磁性部材である。磁性部材110は、例えば、ウィーガンドワイヤ等の径方向(巻回軸R1に垂直な方向)における中心部分と外周部分とで異なる磁気特性を有する複合磁気ワイヤである。複合磁気ワイヤにおいて、中心部分および外周部分のうち、一方が硬磁性部であり、他方が軟磁性部である。
複合磁気ワイヤは、軟磁性部では比較的小さな外部磁界の付与によって磁化の方向が変化するのに対し、硬磁性部では比較的大きな外部磁界を付与しなければ磁化の方向が変化しない磁気特性を有する。複合磁気ワイヤの長手方向に、複合磁気ワイヤの硬磁性部の磁化の方向を反転させるのに十分な比較的大きな外部磁界を印加すると、複合磁気ワイヤの硬磁性部の磁化の方向と軟磁性部の磁化の方向とが同じ方向に揃う。その後、複合磁気ワイヤに印加される外部磁界の方向を反転させても、硬磁性部の影響で、外部磁界が小さい間は、硬磁性部の磁化の方向および軟磁性部の磁化の方向は反転しない。さらに方向を反転させた外部磁界を大きくすると、所定の閾値を超えたところで、軟磁性部の磁化の方向が急激に反転する。このような、磁界が急激に反転する現象は大バルクハウゼンジャンプとも呼ばれる。これにより、複合磁気ワイヤの磁束密度が急激に変化し、複合磁気ワイヤに巻回されたコイル130に電力(発電パルス)が生じる。
なお、磁性部材110は、ウィーガンドワイヤ等の複合磁気ワイヤに限らず、異なる磁気特性の硬磁性部と軟磁性部とを有することで大バルクハウゼン効果を生じる磁性部材であればよい。磁性部材110では、例えば、硬磁性部と軟磁性部とが巻回軸方向と交差(例えば直交)する方向に並び、硬磁性部と軟磁性部とが巻回軸方向に延びるように存在することで、大バルクハウゼン効果が生じる。磁性部材110は、磁気特性の異なる薄膜が積層された構造を有する磁性部材であってもよい。
磁性部材110は、例えば、コイル130の巻回軸に沿って延びるワイヤ状の部材である。磁性部材110の径方向に切断した断面形状は、例えば、円状または楕円状であるが、矩形状または多角形状等の他の形状であってもよい。巻回軸方向において、磁性部材110の長さは、コイル130の長さより長い。
コイル130は、コイル130を構成する導線が磁性部材110に巻回されているコイルである。具体的には、コイル130は、磁性部材110の中心を通り、磁性部材110の長手方向に延びる巻回軸R1に沿って巻回されている。巻回軸方向において、コイル130は、磁性部材110の両側の2つの端面111の間に位置する。また、コイル130は、2つのフェライト部材150の間に位置する。コイル130とフェライト部材150とは離間している。なお、コイル130は、巻回数を増やして、巻回軸方向に延ばすことで、フェライト部材150と接していてもよい。
フェライト部材150は、コイル130の巻回軸に沿ってコイル130と並ぶように、磁性部材110の端部に設けられている。本実施の形態においては、2つのフェライト部材150が、磁性部材110の両端部にそれぞれ1つずつ設けられている。2つのフェライト部材150は、コイル130を挟んで対向し、対称な形状である。以下では、主に、2つのフェライト部材150のうちの一方について説明するが、同様の説明が他方にも適用される。
図4は、フェライト部材150の平面図である。図4には、巻回軸方向にそって外側からフェライト部材150を見た平面視形状が示されている。
図3および図4に示されるように、フェライト部材150は、開口部151が形成された筒状の部材である。フェライト部材150は、例えば、軟磁性材料で構成されるフェライトビーズである。フェライト部材150は、磁石10からの磁束の集磁、および、磁性部材110における磁束の安定化等のために設けられている。フェライト部材150は、例えば、磁性部材110における軟磁性部よりも軟磁性である、つまり、磁性部材110における軟磁性部よりも保磁力が低い。
フェライト部材150には、磁性部材110の一部が挿入されている開口部151が設けられている。開口部151は、巻回軸方向に沿ってフェライト部材150を貫通する貫通孔である。また、開口部151は、巻回軸方向に沿って見た場合に、フェライト部材150の中心に位置する。巻回軸方向に沿って見た場合のフェライト部材150の外周および開口部151のそれぞれ形状は、例えば、円形である。そのため、フェライト部材150は、例えば、円筒状である。
磁性部材110の巻回軸方向における端部は、開口部151内に位置し、フェライト部材150に覆われている。そのため、巻回軸方向において、フェライト部材150の外側の端面152は、磁性部材110の端面111よりも外側に位置する。つまり、巻回軸方向において、端面152は、端面111からみてコイル130とは反対側に位置する。詳細は後述するが、このような構成により、発電素子100は、発電量がばらつきにくくなる。なお、本明細書において、巻回軸方向における「外側」とは、巻回軸方向において磁性部材110の中心から「より離れた位置」のことである。
また、巻回軸方向において、フェライト部材150における端面112よりも内側に位置する領域の長さL1は、フェライト部材150における端面112よりも外側に位置する領域の長さL2よりも長い。これにより、フェライト部材150が磁性部材110を覆う領域が大きくなり、発電素子100の発電量を安定化できる。なお、本明細書において、巻回軸方向における「内側」とは、巻回軸方向において磁性部材110の中心に「より近い位置」のことである。
[効果等]
次に、本実施の形態に係る発電素子100の効果等について、比較例に係る発電素子も参照しながら説明する。
次に、本実施の形態に係る発電素子100の効果等について、比較例に係る発電素子も参照しながら説明する。
図5は、比較例1に係る発電素子100xの概略構成を示す断面図である。図6は、比較例2に係る発電素子100yの概略構成を示す断面図である。
図5に示されるように、比較例1に係る発電素子100xは、発電素子100と比較して、フェライト部材150の代わりにフェライト部材150xを備える。フェライト部材150xは、フェライト部材150よりも、巻回軸方向における長さが短い。また、発電素子100とは異なり、巻回軸方向におけるフェライト部材150xの外側の端面152xの位置は、巻回軸方向におけるフェライト部材150の外側の端面の位置よりも内側である。そのため、端面152xは、巻回軸方向において磁性部材110の端面111よりも内側に位置する。つまり、巻回軸方向において磁性部材110の端面152xよりも外側の端部はフェライト部材150xには覆われていない。
図6に示されるように、比較例2に係る発電素子100yは、巻回軸方向において、発電素子100と比較して、フェライト部材150が内側に位置する。発電素子100yにおいて、フェライト部材150の端面152は、巻回軸方向において磁性部材110の端面111よりも内側に位置する。そのため、発電素子100yでは、巻回軸方向において磁性部材110の端面152よりも外側の端部はフェライト部材150には覆われていない。
ここで、発電素子100、発電素子100xおよび発電素子100yを用いて、発電素子の発電量を測定した結果について説明する。
図7は、発電素子の発電量の測定に用いた回路を示す模式図である。発電素子の発電量の測定においては、図1Aおよび図2に示されるような位置関係になるように発電素子と磁石10とを配置して、発電素子に印加する磁石10からの磁界の方向を繰り返し変化させた。また、図7に示されるような回路に発電素子を接続した。具体的には、発電素子の出力を、キャパシタCおよび抵抗Rに接続された全波整流回路に接続した。外部磁界の向きの反転ごとに発電素子による発電パルスの整流後電圧Vのピークを測定し、発電量=(1/2)CV2とした。発電量は、2500回測定し、測定された2500回の発電量の平均値および最低値を導出した。また、磁石10と磁性部材110との距離を、安定的に発電されると想定される基準の距離に対して-1.2mm、-0.4mm、+0.6mm、+1.2mm、+1.6mm、+2.1mmおよび+2.6mmとした距離条件での発電量を測定した。なお、発電素子100xを用いた測定では、+2.1mmおよび+2.6mmの距離条件での測定は実施しなかった。測定結果を図8から図10に示す。
図8は、比較例1に係る発電素子100xの発電量の測定結果を示す図である。図9は、実施の形態に係る発電素子100の発電量の測定結果を示す図である。図10は、比較例2に係る発電素子100yの発電量の測定結果を示す図である。図8から図10において、横軸は、基準の距離に対する磁石10と磁性部材110との距離の差を示す軸である。横軸の右側ほど磁石10と磁性部材110との距離は長い。また、図8から図10において、縦軸は、上述の方法で測定された発電量を示す軸である。また、電気信号を安定的に検出できる目安の発電量として、基準値P1(図8から図10における二点鎖線)を設定した。
図8に示されるように、比較例1に係る発電素子100xを発電に用いた場合、磁石10と磁性部材110との距離が長くなるほど、発電量が低下し、+1.6mmの距離条件では、発電量の最低値が基準値P1を下回った。
これに対して、図9に示されるように、実施の形態に係る発電素子100を発電に用いた場合、+1.2mmおよび+1.6mmの距離条件で、発電素子100xよりも発電量が増加した。磁石10と磁性部材110との距離が長くなるほど、発電素子に印加される外部磁界が弱くなることになるため、発電素子100は、印加される外部磁界が弱くなっても発電量が低下しにくいといえる。そのため、発電素子100は、使用中に何らかの外部環境の影響を受けて、発電素子100に印加される外部磁界が弱くなった場合でも、発電量が低下しにくく、安定的に発電できる。つまり、発電素子100は、安定的に発電できる印加磁界の強度範囲が広く、発電量がばらつきにくい。
発電素子100において、発電素子100xよりも、安定的に発電できる印加磁界の強度範囲が広くなった理由としては以下のように考えられる。
フェライト部材は、磁性部材110よりも集磁しやすい。そのため、磁石10からの磁束は、磁性部材110よりもフェライト部材に集まりやすい。その結果、磁性部材110は、主に、フェライト部材を介した磁界によって磁化される。
発電素子100xでは、磁性部材110の端面111が、巻回軸方向において、フェライト部材150xの端面152xよりも外側に位置する。そのため、巻回軸方向において、磁性部材110のうち、端面152xよりも外側の端部は、磁化されにくい、または、磁化された磁性部材110の中心部およびフェライト部材150xの影響で、磁性部材110の中心部およびフェライト部材150xと逆方向に磁化することになる。よって、磁化された磁性部材110全体の磁束密度が高くなりにくい。その結果、発電素子100に印加される外部磁界が弱くなった場合に、発電量が大きく低下したと考えられる。
一方、発電素子100では、磁性部材110の端面111が、巻回軸方向において、フェライト部材150の端面152よりも内側に位置し、フェライト部材150に覆われている。そのため、磁性部材110の端部まで磁化されて、磁化された磁性部材110全体の磁束密度が高くなる。その結果、発電素子100に印加される外部磁界が弱くなった場合でも発電量が低下しにくくなったと考えられる。
また、図10に示されるように、発電素子100と同じフェライト部材150を用いた比較例2に係る発電素子100yを発電に用いた場合、+1.2mmおよび+1.6mmの距離条件で、発電素子100よりも発電量が低下した。発電素子100yでも、磁性部材110の端面111が、巻回軸方向において、フェライト部材150の端面152よりも外側に位置することで、発電量が低下したと考えられる。
また、実施の形態に係る発電素子100と同じフェライト部材150を用いても、発電素子100yでは発電量が発電素子100よりも低下している。このことから、比較例1に係る発電素子100xと発電素子100との発電量の違いは、フェライト部材150xとフェライト部材150との巻回軸方向における長さの違いによるものではないと言える。つまり、発電素子100では、磁性部材110の端面111が、巻回軸方向において、フェライト部材150の端面152よりも内側に位置することで、発電量が低下しにくく、外部磁界の強さが変化しても発電量のばらつきが生じにくくなっている。そのため、例えば、エンコーダ1の使用中に磁石10の位置がずれても、発電素子100は、発電量が低下しにくく、安定的に発電した電力を電気信号として出力できる。
なお、図8から図10に示されるように、発電素子と磁石10との距離が最も短い-1.2mmの距離条件では、発電量の最低値が低くなっている。これは、磁性部材110に印加される磁界が強くなりすぎて、軟磁性部での急激な磁化方向の反転の発生が不安定になり、外部磁界の反転毎での発電量にばらつきが生じた可能性がある。
次に、磁石等の磁界印加部が発電素子100に印加する磁界について説明する。
図11および図12は、発電素子100と磁石との位置関係の例を示す図である。図11および図12には、上述のエンコーダ1と同様に、回転軸線Aに沿って、発電素子100と磁石とが並ぶ場合の、回転軸線Aに沿った方向から見た場合の図が示されている。なお、見やすさのため、図11および図12においては、磁石ならびに発電素子100における磁性部材110およびコイル130以外の図示は省略されている。
図11に示される例では、棒状の磁石10Aが回転軸線Aを回転軸として回転する場合が示されている。また、磁石10Aと発電素子100とは、回転軸線Aに沿って見た場合に重なるように配置されている。また、回転軸線Aに沿って見た場合に、磁石10Aの回転軸である回転軸線Aと磁石10Aの中心と発電素子100の中心M1とは同じ位置である。磁石10AにおけるS極とN極とは、回転軸線Aを挟んで対称に配置されている。図11に示される例の場合、発電素子100のうち、最も強く磁石10Aからの磁界が印加される位置は、発電素子100の中心M1である。そのため、磁石10Aが回転しても、磁石10AのS極とN極とは、回転軸線Aを挟んで対称な位置関係を維持しながら、回転軸線Aを中心とする円周上を移動するため、最も強く磁石10Aからの磁界が印加される位置は移動しない。つまり、磁石10Aから印加される磁界は、発電素子100の中心M1で、常に最も強い。また、磁石10Aが回転した場合には、発電素子100の端部よりも早く、発電素子100の中心M1において、磁石10Aから印加される磁界の向きが反転する。つまり、外部磁界の向きが反転する場合に、磁性部材110の磁化方向は、磁性部材110の中心で先に反転し、磁性部材110の中心から磁性部材110の端部へ反転する範囲が広がる。
このような図11で示されるような発電素子100への磁界の印加では、発電素子100の発電において、磁性部材110の中心部分の磁化の影響が大きく、磁性部材110の端部の磁化の影響は小さくなる。そのため、上述の発電量の測定結果で説明した磁性部材110の端部まで磁化されて発電素子100の発電量が向上する効果は、図11で示される磁石10Aと発電素子100との位置関係でも発現するものの、小さくなる可能性がある。
図12には、上述のエンコーダ1(発電システム5)における発電素子100と一対の磁石10との位置関係と同じである例が示されている。つまり、回転軸線Aに沿って見た場合に、一対の磁石10および発電素子100は、回転中心である回転軸線Aとはずれて配置されている。図12に示される例では、一対の磁石10が回転すると、回転軸線Aに沿って見た場合に、発電素子100の長手方向に沿って、円弧状の一対の磁石10が移動する。そのため、発電素子100のうち、最も強く一対の磁石10からの磁界が印加される位置は、一対の磁石10が回転すると、白抜きの矢印M2で示されるように、発電素子100の一端部から中心に向かって移動し、さらに、中心から他端部へ向かって移動する。そのため、一対の磁石10が回転すると、一対の磁石10から印加される磁界の向きが反転する位置も、白抜きの矢印M2で示されるように、発電素子100の一端部から中心に向かって移動し、さらに、中心から他端部へ向かって移動する。
このような図12で示される例における発電素子100への磁界の印加では、発電素子100の発電において、図11で示される例よりも磁性部材110の端部の磁化の影響が大きくなる。そのため、上述の発電量の測定結果で説明した磁性部材110の端部まで磁化されて発電素子100の発電量が向上する効果が顕著に発揮されることになる。つまり、図1Aおよび図2に示したような、回転する一対の磁石10が、巻回軸方向における発電素子100の端部から中心に向かって、印加する磁界の向きを反転させる位置を移動させる発電システム5では、発電量が特にばらつきにくくなる。
[変形例]
次に、実施の形態の変形例について説明する。以下の変形例の説明において、実施の形態との相違点を中心に説明し、共通点の説明を省略または簡略化する。
次に、実施の形態の変形例について説明する。以下の変形例の説明において、実施の形態との相違点を中心に説明し、共通点の説明を省略または簡略化する。
図13は、本変形例に係る発電素子200の概略構成を示す断面図である。発電素子200は、例えば、上述のエンコーダ1の発電素子100の代わりに用いられる。
図13に示されるように、発電素子200は、発電素子100と比較して、フェライト部材150の代わりにフェライト部材250を備える点で相違する。
図14は、フェライト部材250の平面図である。図14には、巻回軸方向に沿って外側からフェライト部材250を見た平面視形状が示されている。
図13および図14に示されるように、フェライト部材250は、本体部255と、本体部255よりも細くなって、巻回軸方向に沿って本体部255から外側に延びる突起部256と、を有する。本体部255および突起部256は、例えば、同じ材料からなる1つの部材を加工して形成された、2つの部位に対してそれぞれ付された呼称である。フェライト部材250は、別の部材で構成された本体部255と突起部256とを接続することで形成されていてもよい。
フェライト部材250には、本体部255および突起部256を巻回軸方向に沿って貫通する開口部251が設けられている。開口部251は、本体部255のコイル130側で開口している。開口部251は、巻回軸方向に沿って見た場合に、本体部255および突起部256の中心に位置する。なお、開口部251は、フェライト部材250のうちの少なくとも本体部255に設けられていればよく、突起部256には設けられていなくてもよい。
磁性部材110の巻回軸方向における端部は、開口部251内に位置し、フェライト部材250に覆われている。そのため、巻回軸方向において、フェライト部材250の外側の端面252は、磁性部材110の端面111よりも外側に位置する。フェライト部材250においては、端面252は突起部256に設けられている。
巻回軸に沿って見た場合の、本体部255の外周、突起部256の外周および開口部251の形状は、例えば、円形である。そのため、本体部255および突起部256の各々の形状は円筒状である。突起部256の外径は、本体部255の外径よりも小さい。
また、巻回軸方向において、本体部255の長さは、例えば、突起部256の長さよりも長い。これにより、突起部256よりも太い本体部255が大きくなり、フェライト部材250の集磁力を高めることができる。
本体部255は、例えば、巻回軸方向において、磁性部材110の端面111よりも全体が内側に位置する。本体部255の一部は、巻回軸方向において、磁性部材110の端面111よりも外側に位置していてもよい。
突起部256は、例えば、円筒の本体部255の端部から巻回軸方向における外側に向かって段差を形成して突出している。突起部256の側面は、巻回軸方向と平行な方向に延びている。なお、突起部256の側面は、巻回軸方向に対して傾斜したテーパ状であってもよい。つまり、突起部256は先端側が細くなった形状であってもよい。
このように、発電素子200では、フェライト部材250が巻回軸方向における外側に向かって突出する細い突起部256を有する。これにより、例えば、磁性部材110、コイル130およびフェライト部材250を包埋する樹脂に突起部256がくい込むことができる、または、筐体190に凹みまたは穴が設けられている場合には、凹みまたは穴に突起部256をはめ込むことができるようになる。そのため、磁性部材110とコイル130とフェライト部材250との複合体が筐体190に支持および固定されやすくなり、発電素子200のパッケージング性を高めることができる。
(その他の実施の形態)
以上、本開示に係る発電素子、発電システムおよびエンコーダについて、実施の形態に基づいて説明したが、本開示は、上記実施の形態に限定されるものではない。上記の各実施の形態に対して当業者が思い付く各種変形を施して得られる形態や、本開示の趣旨を逸脱しない範囲で各実施の形態における構成要素および機能を任意に組み合わせることで実現される形態も本開示に含まれる。
以上、本開示に係る発電素子、発電システムおよびエンコーダについて、実施の形態に基づいて説明したが、本開示は、上記実施の形態に限定されるものではない。上記の各実施の形態に対して当業者が思い付く各種変形を施して得られる形態や、本開示の趣旨を逸脱しない範囲で各実施の形態における構成要素および機能を任意に組み合わせることで実現される形態も本開示に含まれる。
例えば、上記実施の形態では、フェライト部材の開口部は貫通孔であったが、これに限らない。フェライト部材の開口部は、巻回軸方向における内側のみが開口した、貫通していない有底穴であってもよい。つまり、磁性部材の端面の外側にも、フェライト部材の一部が配置されていてもよい。
また、例えば、上記実施の形態では、発電素子の位置が固定され、磁石が回転軸の回転によって回転することで、発電素子に印加される磁界の向きが繰り返し反転したが、これに限らない。磁石の位置が固定され、発電素子が回転軸の回転によって回転することで、発電素子に印加される磁界の向きが繰り返し反転してもよい。
また、例えば、上記実施の形態では、モータと組み合わせて用いられるロータリーエンコーダを例にとって説明したが、これに限らない。本開示の技術は、リニアエンコーダにも適用することができる。
本開示に係る発電素子、発電システムおよびエンコーダは、モータ等の回転または直線移動する機器や装置等に有用である。
1 エンコーダ
10、10A 磁石
20 回転板
30 回転軸
40 基板
50 制御回路
60 メモリ
100、100x、100y、200 発電素子
110 磁性部材
130 コイル
150、150x、250 フェライト部材
255 本体部
256 突起部
151、251 開口部
181、182 端子
190 筐体
10、10A 磁石
20 回転板
30 回転軸
40 基板
50 制御回路
60 メモリ
100、100x、100y、200 発電素子
110 磁性部材
130 コイル
150、150x、250 フェライト部材
255 本体部
256 突起部
151、251 開口部
181、182 端子
190 筐体
Claims (8)
- 外部磁界の変化によって大バルクハウゼン効果を生じる磁性部材と、
前記磁性部材に巻回されたコイルと、
前記コイルの巻回軸に沿って前記コイルと並んで配置され、前記磁性部材の一部が挿入されている開口部が設けられたフェライト部材と、を備え、
前記フェライト部材の端部は、前記磁性部材の端部よりも前記巻回軸に沿って前記コイルより離れた位置に位置する、
発電素子。 - 前記フェライト部材は、本体部と、前記本体部よりも細くなって、前記巻回軸に沿って前記本体部から外に延びる突起部と、を有する、
請求項1に記載の発電素子。 - 前記巻回軸に沿う向きにおいて、前記本体部の長さは、前記突起部の長さよりも長い、
請求項2に記載の発電素子。 - 前記磁性部材は、前記巻回軸に沿って延びるワイヤ状であり、
前記開口部は、前記巻回軸に沿って前記フェライト部材を貫通している、
請求項1から3のいずれか1項に記載の発電素子。 - 前記巻回軸方向において、前記フェライト部材における前記磁性部材の端部よりも内側に位置する領域の長さは、前記フェライト部材における前記磁性部材の端部よりも外側に位置する領域の長さよりも長い、
請求項1から4のいずれか1項に記載の発電素子。 - 請求項1から5のいずれか1項に記載の発電素子と、
前記発電素子に磁界を印加し、かつ、前記発電素子に印加される前記磁界の向きを繰り返し反転させる磁界印加部と、を備え、
前記発電素子は、前記磁界印加部による前記磁界の向きの反転により発電する、
発電システム。 - 前記磁界印加部は、前記巻回軸方向における前記発電素子の端部から中心に向かって前記磁界の向きを反転させる位置を移動させる、
請求項6に記載の発電システム。 - 請求項6または7に記載の発電システムを備え、
前記発電素子は、前記磁界印加部による前記磁界の向きの反転により発電した電力を出力する、
エンコーダ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202280070561.1A CN118235018A (zh) | 2021-11-02 | 2022-09-14 | 发电元件、发电系统以及编码器 |
| DE112022005254.6T DE112022005254T5 (de) | 2021-11-02 | 2022-09-14 | Energieerzeugungselement, energieerzeugungssystem und encoder |
| JP2023557641A JPWO2023079838A1 (ja) | 2021-11-02 | 2022-09-14 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021-179211 | 2021-11-02 | ||
| JP2021179211 | 2021-11-02 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023079838A1 true WO2023079838A1 (ja) | 2023-05-11 |
Family
ID=86241266
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/034356 WO2023079838A1 (ja) | 2021-11-02 | 2022-09-14 | 発電素子、発電システムおよびエンコーダ |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JPWO2023079838A1 (ja) |
| CN (1) | CN118235018A (ja) |
| DE (1) | DE112022005254T5 (ja) |
| WO (1) | WO2023079838A1 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006073974A (ja) * | 2004-09-03 | 2006-03-16 | Taiji Takemura | 磁気センサ |
| JP2021021706A (ja) * | 2019-07-30 | 2021-02-18 | オリエンタルモーター株式会社 | 回転検出装置 |
-
2022
- 2022-09-14 JP JP2023557641A patent/JPWO2023079838A1/ja active Pending
- 2022-09-14 DE DE112022005254.6T patent/DE112022005254T5/de active Pending
- 2022-09-14 CN CN202280070561.1A patent/CN118235018A/zh active Pending
- 2022-09-14 WO PCT/JP2022/034356 patent/WO2023079838A1/ja active Application Filing
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006073974A (ja) * | 2004-09-03 | 2006-03-16 | Taiji Takemura | 磁気センサ |
| JP2021021706A (ja) * | 2019-07-30 | 2021-02-18 | オリエンタルモーター株式会社 | 回転検出装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2023079838A1 (ja) | 2023-05-11 |
| CN118235018A (zh) | 2024-06-21 |
| DE112022005254T5 (de) | 2024-09-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5108176B2 (ja) | 磁気感受性プローブ位置センサ | |
| JP2008180550A (ja) | 磁気センサ装置 | |
| WO2022230651A1 (ja) | 発電素子、エンコーダおよび磁性部材の製造方法 | |
| CN113939714B (zh) | 转速检测器 | |
| US20070164733A1 (en) | Magnetic encoder device and actuator | |
| WO2022230652A1 (ja) | 発電素子、エンコーダ、磁性部材の製造方法および信号取得方法 | |
| US11994415B2 (en) | Encoder system for a drive | |
| JP2023164542A (ja) | センサ | |
| JPWO2022230652A5 (ja) | ||
| JPWO2022230651A5 (ja) | ||
| JP2020101502A (ja) | 車両用トルクセンサ | |
| WO2022153861A1 (ja) | 発電素子、磁気センサ、エンコーダおよびモータ | |
| WO2023079838A1 (ja) | 発電素子、発電システムおよびエンコーダ | |
| CA2593553C (en) | Aerospace movement probe | |
| JP2008061316A (ja) | ブラシレスモータ及びモータセンサ | |
| CN108539931B (zh) | 以旋转变压器为传感器的伺服驱动装置 | |
| JPH05126512A (ja) | 角度検出器 | |
| JP2007292511A (ja) | 位置検出装置及び電動パワーステアリング用モータ | |
| JP2002310609A (ja) | 回転角度検出装置 | |
| WO2024202919A1 (ja) | 発電素子、発電システム、及びエンコーダ | |
| WO2024075465A1 (ja) | 発電素子、発電システムおよびエンコーダ | |
| CN117501072A (zh) | 旋转检测器 | |
| JPH06258155A (ja) | 歪検出装置および歪検出ユニット | |
| JP2005221342A (ja) | コイル式電流センサ | |
| CN118119825B (en) | Rotation speed detector |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22889662 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2023557641 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202280070561.1 Country of ref document: CN |